Изобретение относится к электротехнике и может быть использовано в асинхронных реверсивных электроприводах, работающих при частых пусках и остановах.
Целью изобретения является повьше- ние быстродействия.
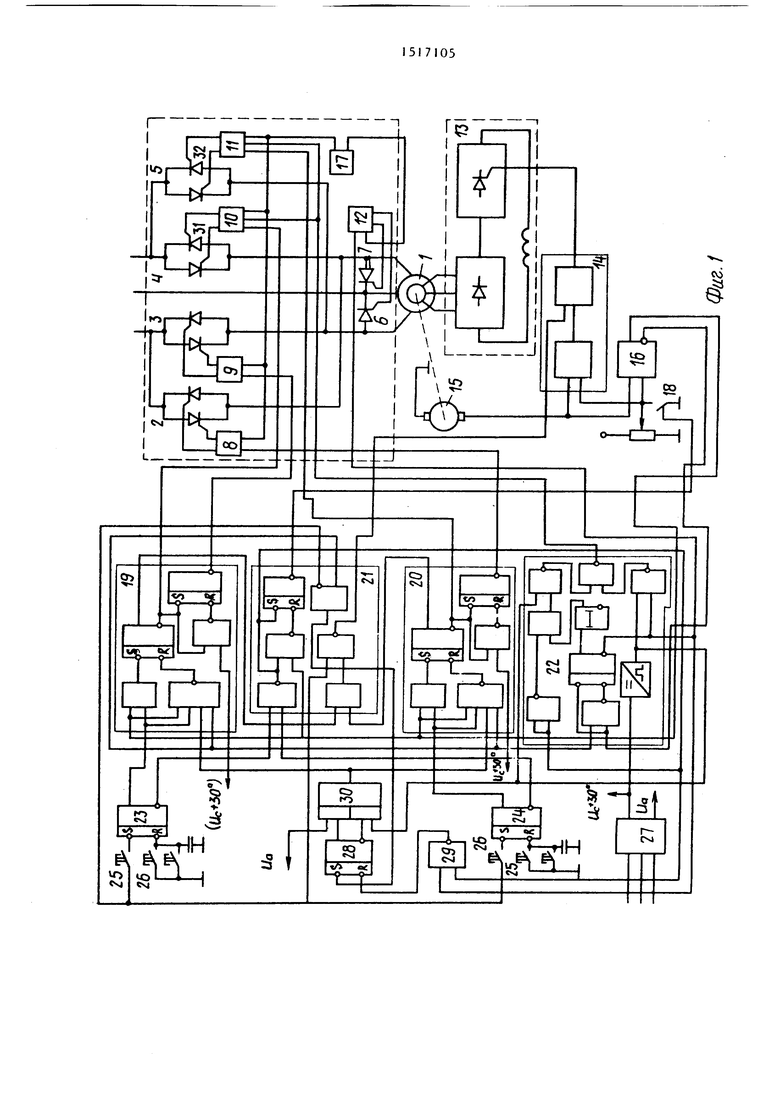
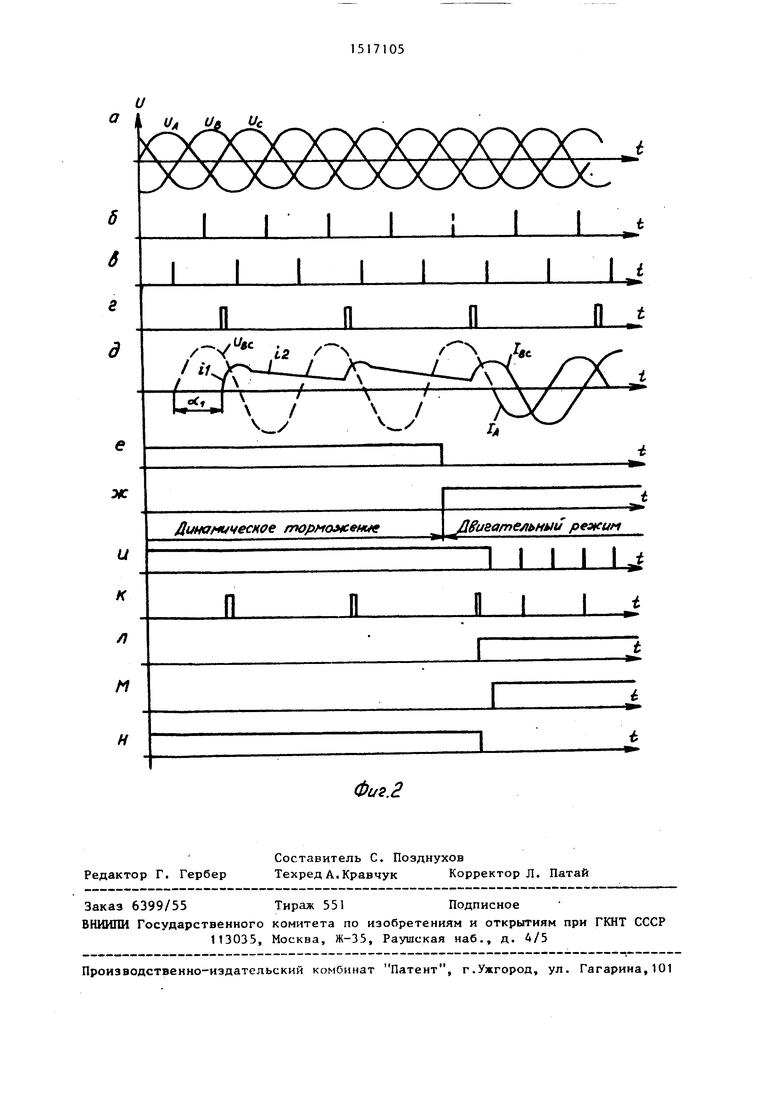
На фиг. 1 приведена структурная схема электропривода; на фиг. 2 - временные диаграммы, поясняющие работу электропривода.
Электропривод переменного тока содержит асинхронный электродвигатель 1, реверсивный тиристорный коммутатор, выполненный на четырех парах 2-5 встречно-параллельно соединенных тиристоров, два шунтирующих тиристора 6 и 7, пять узлов 8-12 управления тирис- торами, выпрямительно-инверторный преобразователь 13 с блоком 14 управления, включенный в роторную цепь электродвигателя 1, датчик 15 частоты вращения, блок 16 сравнения, узел 17 контроля состояния тиристоров, управляемый ключ 18, блок 19 и 20 управления коммутаторами Вперед и Назад, узел 21 блокировки, блок 22 динамического торможения, два командных триггера 23 и 24 С кнопками 25 и 26 управления,, блок 27 синхроничаци , RS- триггер 28, логический элемент И-НЕ 29 и логический элемент 2И-ИЛИ 30. ПерСП
1
о ел
вые выводы первой 2 и второй 3 пар встречно-параллельно соединенных тиристоров объединены и соединены с первым зажимом даш подключения к питающей сети. Первые выводы третьей 4 и четвертой 5 пар встречно-параллельно соединенных тиристоров также объединены и подключены к второму зажиму для подключения питающей сети.Вто- 13ЫВОДЫ второй 3 и четвертой 5 пар встречно-параллельно соединенных тиристоров соединены с анодом первого шунтирующего тиристора 6 и первым выводам статорной обмотки электродвигателя 1, а вторые выводы первой 2 и третьей 4 пар встречно-параллельно соединенных тиристоров подключены к аноду второго шунтирующего тиристора 7 и к второму выводу статорной обмотки электродвигателя 1, Катоды шунтирующих тиристоров 6 и 7 и третий вывод статорной обмотки электродвигателя 1 объединены и соединены с третьим зажимом для подключения к питающей сети.Входы блока 27 синхронизации соединены с зажимами для подключения к питающей сети. Выходы первого 8, второго 9, третьего 10, четвертого 1i и пятого 12 узлов управления тирист- - рами соединены с управляющими UM;;IMM соответственно тиристоров первой 2, второй 3, третьей 4 и четвертой 5 пар и первого 6 и второго 7 шунтирующих тиристоров. Выход датчика 15 часто,ты вращения соединен с первыми входами блока 16 сравнения и блока 14 управления выпрямительно-инверторным преобразователем 13, объединенные вторые входы которых, шунтированные управляемым ключом 18, предназначены для подачи сигнала задания. Объединенные первые входы блоков 19 и 20 управления коммутаторами Вперед и Назад и узла 21 блокировки соединены с прямым выходом блока 16 сравнения, инверсный выход которого подключен к перво. входу блока 22 динамического торможения. Вторые входы блоков 19 и 20 управления коммутаторам} Вперед и Назад соединены с прямыми выходами соответственно первого 23 и второго 24 командных триггеров, инверсные выходы которых соединены соответственно с вторым и третьим входами у: ла 21 блокировки. Третьи входы блоков 19 и 20 управления коммутаторами Вперед и Назад и второй вход блока 22 динамическо1 о торможения объединены и соединены с первым выходом узла 21 блокировки, четвертый и пятый входы которого соединены с первыми выходами соответственно блоков 19 и 20 управления коммутаторами Вперед и Назад. Второй и третий выходы блока 19 управления коммутатором Вперед соединены с первыми входами соответственно второго 9 и третьего 10 узлов управления тиристорами. Второй и третий выходы блока 20 управления коммутатором Назад соединены с первыми входами соответственно четвертого II и первого 8 узлов управления тиристорами. Четвертые входы блоков 19 и 20 управления коммутаторами Вперед. и Назад и третий вход блока 22 динамического торможения объединены
и соединены с первым выходом блока 27 синхронизации. Второй выход узла 21 блокировки соединен с шестым входом узла 21 блокировки и через первую 25 и вторую 26 кнопки управления с Sвходами соответственно первого 23 и второго 24 командных триггеров. Третий выход узла 21 блокировки соединен с четвертым входом блока 22 динамического торможения, первый выход и пятый вход которого объединены, а второй выход соединен с вторьми входами третьего 10 и четвертого П узлов управления тиристорами. Четвертый выход узла 21 блокировки соединен с управляющим входом управляемого ключа 18. Пятый вход узла 21 блокировки соединен с третьим входом блока 14 управления выпрямительно-инверторным преобразователем, третий выход блока 22 динамического торможения соединен с первым входом пятого узла 12 управления тиристорами, второй вход которого подключен к первому выходу узла 17 контроля состояния тиристоров, второй выход которого соединен с вторыми входами первого 8 и второго 9 узлов управления тиристорами и с тре- тьи11и входами третьего 10 и четвертого 11 узлов управления тиристоров. Выход логического элемента 2И-ИЛИ 30 соединен с пятыми входами блоков 19 и 20 управления коммутаторами Вперед и Назад. Первый, второй, третий и четвертый входы логического элемента 2И-ИЛИ соединены соответственно
с вторым выходом блока 27 С1шхрониза-. ции, г прямым и инверсным выходами R-S-триггера 28 и с первым выходом блока 22 динамического торможения.
515
S-вход R-S-триггера 28 соединен с шетым выходом узла 21 блокировки, а R-вход К 5-триггера 28 соединен с выходом логического элемента И-НЕ 29, первый и второй входы которого соединены соответственно с третьим выходо блока 22 динамического торможения и с третьим выходом узла 21 блокировки
Электропривод переменного тока ра ботает следующим образом.
В исходном состоянии с прямых выходов командных триггеров 23 и 24 на вторые входы блоков 19 и 20 управления коммутаторами Вперед и Назад поступают сигналы О, запрещающие их включение. Сигнал О с инверсного выхода блока 16 сравнения запрещает включение блока 22 динамического торможения, а сигнал 1 с прямого выхо- да блока 16 сравнения разрешает включение блоков 19 и 20 управления коммутаторами Вперед и Назад.
С первого выхода узла 21 блокировки идет разрешающий сигнал 1 на включение любого блока 19 и 20 управления коммутаторами Вперед и Назад, а с второго выхода узла 21 блокировки идет сигнал О на вход кно- пок 25 и 26 включения командньрс триг- геров 23 и 24. На узлы 8-11 управления тиристорами поступают сигналы запрета О с вторых и третьих выходов блоков 19 и 20 управления коммутаторами Вперед и Назад. Соответст- венно и с второго и третьего выходов блока 22 динамического торможения поступает запрет на узлы 10-12 управления тиристорами. На прямом выходе R-S-триггера 28 - сигнал 1, разре- шающий прохождение сигнала U с второго выхода блока 27 синхронизации. На инверсном выходе R-S-триггера 28 - сигнал О, который запрещает прохождение сигнала с первого выхода бло ка 22 динамического тс можения. Тиристоры коммутатора закрыты, двигатель 1 обесточен. Для исключения ударных моментов при пуске в начале включаются на амплитуде линейного на- пряжения А тиристоры фазы А. Для пуска двигателя 1, например Вперед, замыкают кнопку 25. Первый командный триггер 23 переключается и подает сигнал I на второй вход блока 19 управления коммутатором Вперед. Однако сигналы на выходах-блока 19 уп- р авления коммутатором не изменятся, так как на его пятый вход с выхода
056
логического элемента 2И-ИЛИ 30 поступает сигнал О, т.е. сигнал на данном входе зависит от выходного сигнала И блока 27 синхронизации. Вход блока 27 синхронизации подключен к зажимам питающей сети (фиг. За) и на его втором выходе формируются узкие импульсы в момент перехода напряжени фазы А через нуль, которые выдаются на тиристоры коммутатора (фиг. 26). При появлении синхроимпульса на выходе логического элемента 2И-ИЛИ 30 на втором выходе блока 19 управления коммутатором Вперед формируется сигнал 1, который подается через третий узел 10 управления на тиристоры третьей пары 4 (тиристоры фазы С) которые включаются на амплитуде линейного напряжения . Двигатель 1 подключается к двум фазам сети В и С С первого выхода блока 19 управления коммутатором Вперед сигнал О подается на четвертый вход узла 21 блокировки и изменяет состояние на первом и втором его выходах. Сигнал О с первого выхода узла 21 блокировки запрещает включение блоков 19, 20 и 22. На в.тором выходе блока 19 управления коммутатором Вперед формируется сигнал 1, а при появлении на первом выходе блока 27 синхронизации синхроимпульса (Uj, +30 ), сдвинутого на 30 эл.град. в сторону опережения от момента прохождения напряжения фазы С через нуль (фиг. 2,в), с третьего выхода блока 19 управления коммутатором сигнал 1 подается через второй узел 9 управления на тиристоры второй пары 3 (тиристоры фазы А), которые включаются на амплитуде фаз- .ного напряжения-А. Двигатель 1 подключается к третьей фазе питающей сети. Одновременно с переключением первого командного триггера 23 изменяется сигнал на четвертом выходе узла 21 блокировки и размыкается ключ 18.
Сигналы задания и обратной связи по скорости поступают на второй и первый входы блока 14 управления, вызывая увеличение углов управления тиристоров выпрямительно-инверторного преобразователя 13 и уменьшение его противо-ЭДС. По мере разгона двигателя 1 растет напряжение обратной связи, снимаемое с датчика 15 частоты вращения. При достижении им величины, близкой к напряжению задания, двигатель 1 начинает работать на установившейся скорости. При наличии пере- рег улирования скорости при разгоне двигателя 1 напряжение обратной связи становится больше заданного и блок 16 сравнения переключается.
По сигналу О на его прямом выходе (фиг. 2,ж) изменяется на противоположное состояние выходов блока 19 управления коммутатором Вперед, а сигналом 1 на инверсном выходе блока 16 сравнения разрешается (фиг. 3,е включение блока 22 динамического торможения. Однако торможение не вклю- чается, так как с первого выхода узла 21 блокировки идет сигнал О.
После вьщержки времени 20-40 мс на первом выходе узла 21 блокировки
устанавливается сигнал 1 , который
разрешает включение блока 22 динамического торможения.
Одновременно переключается триггер 28 (фиг. 2,н), разрешая прохождение управляющих импульсов с перво- го выхода блока 22 динамического торможения (фиг. 2,г) через логический элемент 2И-ИЛИ 30 (фиг. 2,к) на пятые входы блоков 19 и 20 управлен11 7 коммутаторами. С третьего выход;: oj; ка 22 динамического торможения ci.j i-.iii Ч подается через пятый узел 12 упD,
равления на шунтирующие тиристоры о и 7.
С второго выхода блока 22 динаТии- ческого торможения сигнал 1 подается через третий 10 и четвертый 11 узлы управления на тормозные тиристоры 31 и 32 третьей 4 и четвертой 5 пар, которые оаботают как в двига- тельном, так и в тормозном режимах. Однако шунтируюшие тиристоры 6 и 7 не включаются, так как напряжение положительной полярности появляется на их анодах только после включения тормозных тиристоров 31 и 32, когда в обмотках двигателя 1 возникает ЭДС самоиндукции. При этом управляющие импульсы тормозными тиристорами 31 и 32 формируются только на положительной полуволне напряжения Ug(.c углом управления о(, , соответствующим номинальному значению тока динамического торможения двигателя. Угол о(, зависит от параметров (мощности) асинхронных двигателей и колеблется от 140 эл. град, до 170 зл.град. Когда ток тормозных тиристоров i, (фиг. ) достигнет максимального значения и наQ5
0
5 0
5 0 г,
чнет спадать, в обмотках двигателя ВС и ВА возникает ЭДС самоиндукции (плюсом на анодах шунтирующих тиристоров 6 и 7), тиристоры 6 и 7 включаются и поддерживают протекание постоянного тока i (фиг. 3,д) через обмотки двигателя 1. Ток через шунтирующие тиристоры 6 и 7 протекает до момента включения тормозных тиристоров, а затем, когда ток последних достигнет максимума, включаются снова шунтирующие тиристоры и т.д. Идет процесс динамического торможения. Когда напряжение обратной связи сравняется с заданным, блок 16 сравнения переключается и переводит коммутатор в двигательный режим, т.е. снимается управление с шунтирующих 6 и 7 и тормозных 31 и 32 тиристоров. Однако сигналы на выходах блока 19 управления коммутатором Вперед не изменяется, так как на его.пятом входе присутствует сигнал О.
При появлении на первом выходе блока 22 динамического торможения управляющего сигнала l через логический злемент 2И-ИЛИ 30 снимается запрет на переключение блока 19 управления коммутатором Вперед (фиг. 2,к).
С второго выхода блока 19 управления коммутатором Вперед сигнал 1 подается через узел 10 управления на тиристоры .третьей пары 4. Так как управляющие импульсы на включение тормозных тиристоров выдаются на положительной полуволне линейного напряжения иg(. с углом о/, управления, то включится тиристор 31 с углом о(, управления. Двигатель 1 подключается к двум фазам сети В и С, при этом к шунтирующим тиристорам 6 и 7 прикладываются отрицательные напряжения Ugj. и U|,c/2 соответственно и они закрьшаются (с выхода блока 22 динамического торможения идет сигнал О на пятый узел 12 управления).
Формирование сигнала на третьем выходе блока 19 уг равления коммутатором Вперед (фиг. 2, м) происходит аналогично,.как и при пуске, после появле 1ия на первом выходе блока 27 синхронизации синхроимпульса и +30 (фиг. 2,6). Сигнал 1 подается через вт( i/ой узел 9 управления на тиристоры второй пары 3 (тиристоры фазы А), которые, включаются на амплитуде фазного напряжения Л и двигатель I подключается к третьей фазе А питающей
915
сети. Одновременно после переключени блока 19 управления коммутатором на вход S-триггера 28 поступает сигнал О (на входе R-триггера 28 - сигнал 1), и триггер 28 переключается, рарешая прохождение сигнала и„ с второго выхода блока 27 синхронизации. На фиг. 2,и показано напряжение на выходе узла контроля состояния тиристоров. Аналогично, как и при перерегулировании скорости, работает устройство при переходе на новую установившуюся скорость.
При реверсе устройство работает следующим обрааом.
Если двигатель 1 работал на установившейся скорости в направлении Вперед, то для осуществления реверса необходимо нажать кнопку 26 Назад. При этом отключается первый командный триггер 23, который переключает блок 19 управления коммутатором Вперед, тем самым прекращая выдачу импульсов на тиристоры второй 3 и тре тьей 4 пар. Одновременно изменяется сигнал на четвертом выходе узла 21 блокировки, включается управляемый ключ 18 и шунтирует выход блока зада- ния. Блок 16 сравнения переключается, однако торможение не включается, так как на втором выходе узла 21 блокировки присутствует сигнал О. После отсчета выдержки времени 20-40 мс, включается динамическое торможение и одновременно переключаются второй командный триггер 24 Назад и триггер 28, разрешая прохождение управляющих импульсов с первого выхода блока 22 динамического торможения на вход блоков 19 и 20 управления. С третьего выхода блока 22 динамического торможения сигнал I подается на включение шунтирующих тиристоров 6 и 7, а с второго выхода - на включение тормозных тиристоров 31 и 32. Двигатель тормозится. Когда скорость станет равной нулю, блок 16 сравнения переключается и переводит коммутатор без выдержки времени в двигательный режим направления Назад аналогично, как при перерегулировании скорости.
Таким образом, по сравнению с известным устройством, где при переключении электропривода с тормозного в двигательный режим затрачивае.тся 40- 80 мс, изобретение позволяет исключить бестоковую паузу при переключе
05
10
to
15
20
25. 30
35
10
0
5
НИИ и тем самым повысить быстродействие электропривода.
Формула изобретения
Электропривод переменного тока, содержащий асинхронный электродвигатель, реверсивный тиристорный коммутатор, вьтолненный на четырех парах встречно-параллельно соединенных тиристоров, два шунтирующих тиристора, пять узлов управления тиристорами, выпрямительно-инверторный преобразователь с блоком управления, включенный в роторную цепь электродвигателя, датчик частоты вращения, блок сравнения, узел контроля состояния тиристоров, блоки управления коммутаторами Вперед и Назад, узел блокировки, блок динамического торможения, два командных 1 риггера с кнопками управления, подключенными к их входам, блок синхронизации, входы которого соединены с зажимами для подключения к питающей сети, первые выводы первой и второй пар встречно-параллельно соединенных тиристоров объединены и соединены с первым зажимом для подключения к питающей сети, первые выводы третьей и четвертой пар встречно- параллельно соединенных тиристоров объединены и подключены к второму зажиму для подключения питающей сети, вторые выводы второй и четвертой пар встречно-параллельно соединенных тиристоров объединены и соединены с анодом первого шунтирующего тиристора и первым выводом статорной обмотки электродвигателя, вторые выводы первой и третьей пар встречно-параллельно соединенных тиристоров и анод второго шунтирующего тиристора объединены и подключены к второму выводу статорной обмотки электродвигателя, катоды шунтирующих тиристоров и третий вывод статорной обмотки электродвигателя объединены и соединены с третьим зажимом для подключения к питающей сети, выходы первого, второго, третьего, четвертого и пятого узлов управления тиристорами соединены с управляющими цепями соответственно тиристоров первой, второй, третьей и четвертой пар и шунтирующих тиристоров, выход датчика частоты вращения соединен с первыми входами блока сравнения. и блока управления выпрямительно-ин- верторным преобразователем, объедич1517
нениые вторые входы которых, шунтированные управляемым ключом, предназначены для подачи сигнала задания, объединенные первые входы блоков управления коммутаторами Вперед и На зад и узла блокировки соединены с прямым выходом блока сравнения, инверсный выход которого подключен к первому входу блока динамического торможения, вторые входы блоков управления коммутаторами Вперед и Назад соединены с прямыми выходами соответственно первого и второго командных триггеров, инверсные выходы которых соединены соответственно с вторым и третьим входами узла блокировки, третьи входы блоков управления коммутато рами Вперед и Назад и второй вход блока динамического торможения объеди нены и соединены с первым выходом узла блокировки, четвертый и пятый входы которого соединены с первыми выходами соответственно блоков управления коммутаторами Вперед и Назад, второй и третий выходы блока управления коммутатором Вперед соединены с первыми входами соответственно второго и третьего узлов управления тиристорами, второй и третий выходы бло ка управления коммутатором Назад соединены с первыми входами соответственно четвертого и первого узлов управления тиристорами, четвертые входы блоков управления коммутаторами Вперед и Назад и третий вход блока динамического торможения объединены и соединены с первым выходом блока синхронизации, второй выход узла блокировки соединен с шестым входом узла блокировки и через первую и вторую кнопки управления с S-входами соответственно первого и второго командных триггеров, третий выход узла
5
10512
блокировки соединен с четвертым входом блока динамического торможения, первый выход и пятый вход которого объединены, а второй выход соединен с вторыми входами третьего и четвертого узлов управления тиристорами, четвертый выход узла блокировки соединен с управляющим входом управля Q емого ключа, пятый выход узла блокировки соединен с третьим входом блока управления выпрямительно-инвертор- ным преобразователем, третий выход блока динамического торможения единен с первым входом пятого узла управления тиристорами, второй вход которого подключен к первому выходу узла контроля состояния тиристоров, второй вьсход которого соединен с рыми входами первого и второго узлов управления тиристоров и с третьими входами третьего и четвертого узлов управления тиристоров, отличающийся тем, что, с целью по25 вышения быстродействия, в него введены R-S-триггер, логический элемент И-НЕ и логический элемент 2И-ИЛИ, выход которого соединен с пятыми входами блоков управления коммутаторами
sQ Вперед и Назад, первый, второй, третий и четвертый входы логического элемента И-ИЛИ 2 соединены соответственно с вторым выходом блока синхронизации, с прямым и инверсным выходами R-S-триггера и с первым выходом
блока динамического торможения, S- вход Е.-87Триггера соединен с шестым выходом узла блокировки, R-вход R-S- триггера соединен с выходом логического элемента И-НЕ, первый и второй
40
входы которого соединены соответственно с третьим вькодом блока динамического торможения и с третьим выходом узла блокировки. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным трехфазным электродвигателем | 1987 |
|
SU1534709A1 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Устройство для управления тиристорным коммутатором асинхронного трехфазного электродвигателя | 1980 |
|
SU940271A1 |
| Устройство для динамического торможения асинхронного двигателя | 1984 |
|
SU1210193A1 |
| Электропривод переменного тока | 1983 |
|
SU1128362A1 |
| Электропривод с комбинированным управлением частотой вращения | 1983 |
|
SU1223323A1 |
| Устройство для управления асинхронным трехфазным электродвигателем | 1977 |
|
SU657551A1 |
| Электропривод переменного тока | 1981 |
|
SU1001417A1 |
| Электропривод переменного тока | 1983 |
|
SU1135001A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
Изобретение относится к электротехнике и может быть использовано в асинхронных реверсивных электроприводах, работающих при частых пусках и остановах. Целью изобретения является повышение быстродействия. Электропривод переменного тока содержит электродвигатель 1, реверсивный тиристорный коммутатор, выполненный на четырех парах встречно-параллельно соединенных тиристоров, два шунтирующих тиристора, узлы управления тиристорами, преобразователь с блоком управления, датчик частоты вращения, блок сравнения, узел контроля состояния тиристоров, блоки управления коммутатором, узел блокировки, блок динамического торможения, два командных триггера, блок синхронизации. За счет введения в состав электропривода R-S - триггера, логических элементов И-НЕ и 2И-ИЛИ исключается бестоковая пауза (40-80 мкс) при переключении с тормозного в двигательный режим, что повышает быстродействие привода. 2 ил.
| Петров Л.П | |||
| и др | |||
| Асинхронный привод с тиристорными коммутаторами | |||
| - М.: Энергия, 1970, рис | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Агрегаты тиристорные, диодные серий ТДЕ, ТДП, ТДПР, ТДЕР | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
