УРОВЕНЬ ТЕХНИКИ
Основные принципы и способы электромагнитного (ЭМ) каротажа для геологических пластов хорошо известны. Например, индукционный каротаж для определения удельного сопротивления (или его обратной функции: удельной проводимости) геологических пластов, смежных со скважиной, давно стал стандартным и значимым способом в поиске и добыче подземных нефтяных залежей. Вкратце, передатчик передает электромагнитный сигнал, который проходит через пластовые породы вокруг скважины и индуцирует сигнал в одном или более приемников. На амплитуду и/или фазу сигналов приемника оказывает воздействие удельное сопротивление пласта, что позволяет делать измерения удельного сопротивления. Измеряемые характеристики сигнала и/или характеристики пласта, рассчитываемые на основании этого, записывают как функцию глубины инструмента или положения инструмента в скважине, получая диаграмму каротажа пласта, которую могут применять специалисты по анализу.
В каротаже в процессе бурения (КПБ) и в кабельном каротаже применяют ЭМ способы. Такие способы применяют для оценки характеристик пласта, включая удельное сопротивление пласта, анизотропию пласта, положение границ и т. д.
Характеристика (такая как удельное сопротивление) конкретного пласта может быть изотропной (одинаковой во всех направлениях) или анизотропной (неодинаковой в разных направлениях). Измерение такой характеристики в нетрадиционном пласте, содержащем, например, трещины и/или складки, является сложной задачей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
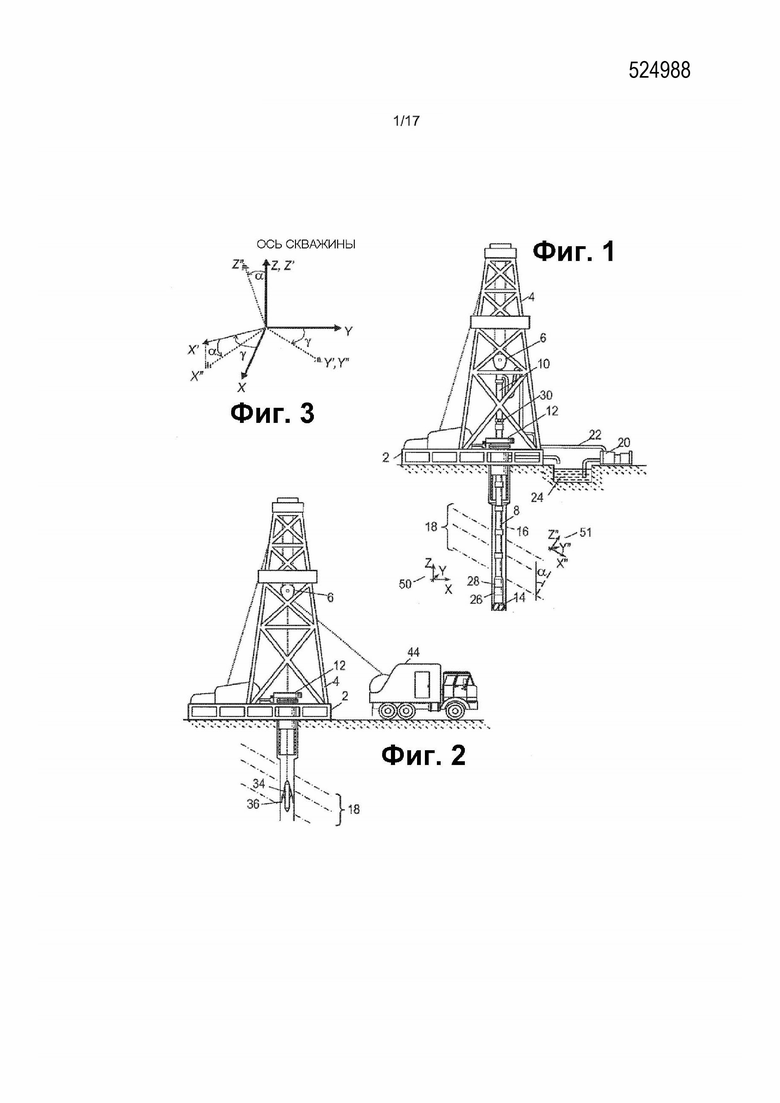
Фиг. 1 иллюстрирует типовую среду каротажа в процессе бурения, включая падающие пласты породы.
Фиг. 2 иллюстрирует типовую среду кабельного каротажа, включая падающие пласты породы.
Фиг. 3 иллюстрирует отношение между ориентацией скважины и падающим пластом породы.
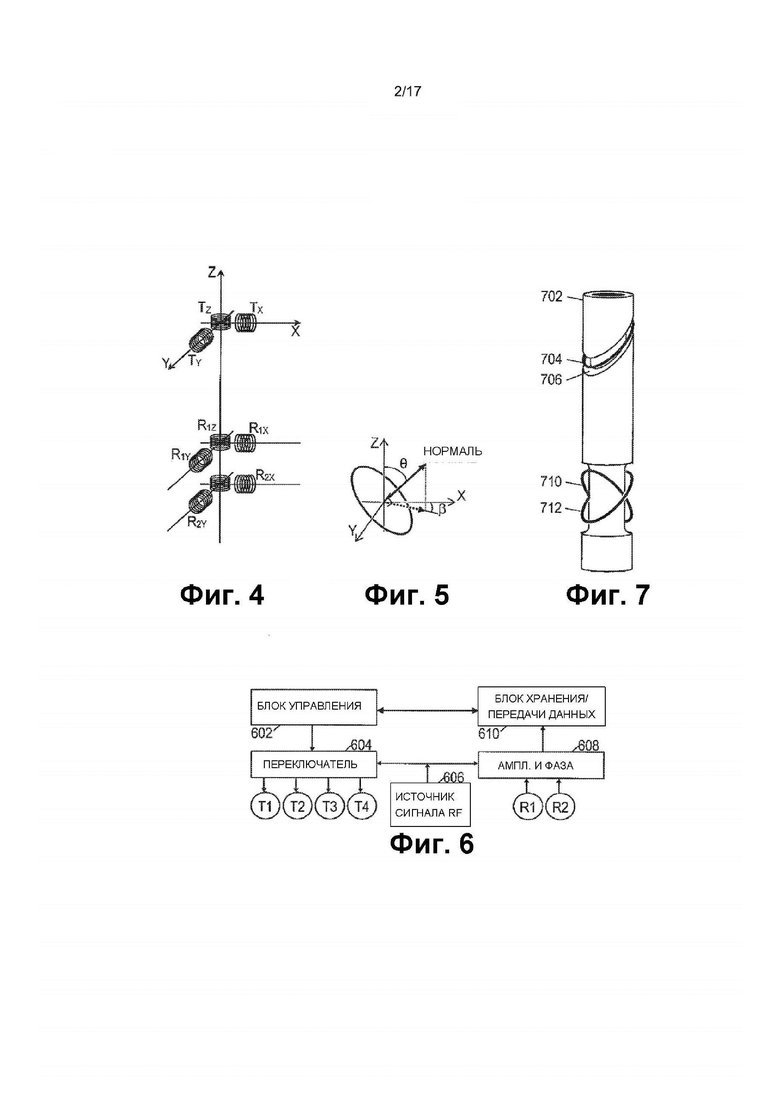
Фиг. 4 иллюстрирует гипотетическую схему расположения антенны для инструмента, содержащего ортогональный трехосный передатчик и два ортогональных трехосных приемника.
Фиг. 5 иллюстрирует углы для определения ориентации наклонной антенны.
Фиг. 6 иллюстрирует блок-схему типового блока электронных устройств для электромагнитного инструмента каротажа сопротивления.
Фиг. 7 иллюстрирует типовой инструмент электромагнитного каротажа сопротивления, содержащий наклонно расположенный передатчик и антенны приемника.
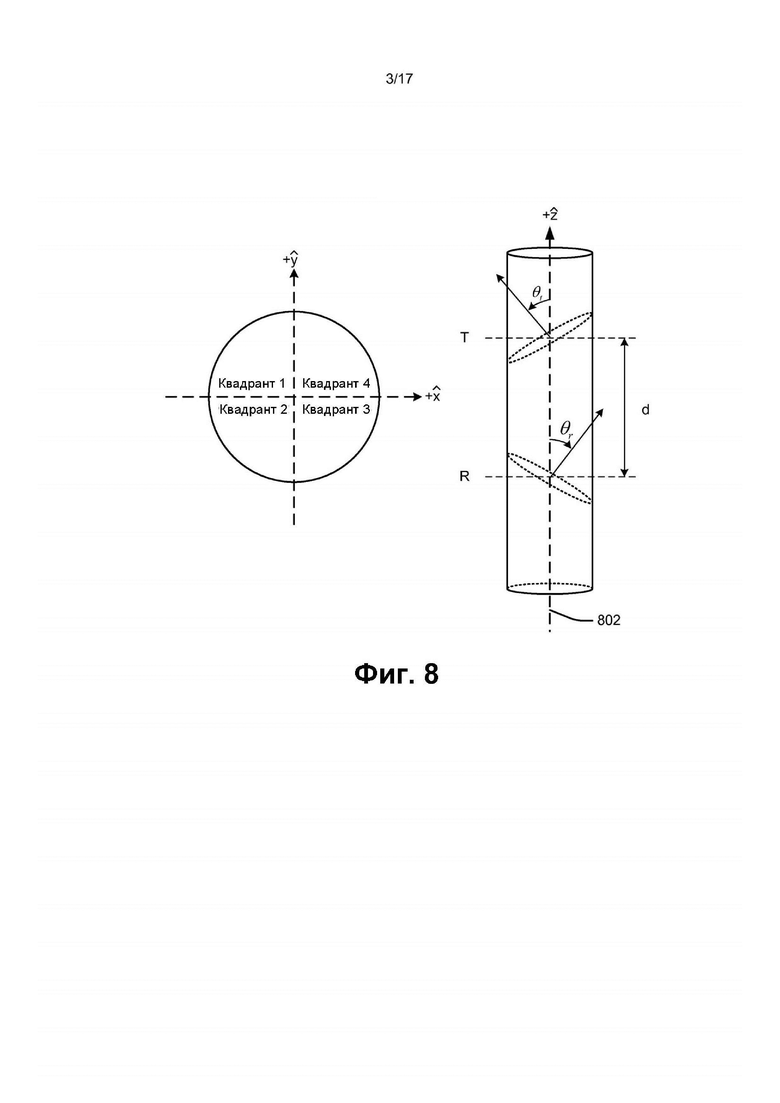
Фиг. 8 иллюстрирует схему расположения антенн.
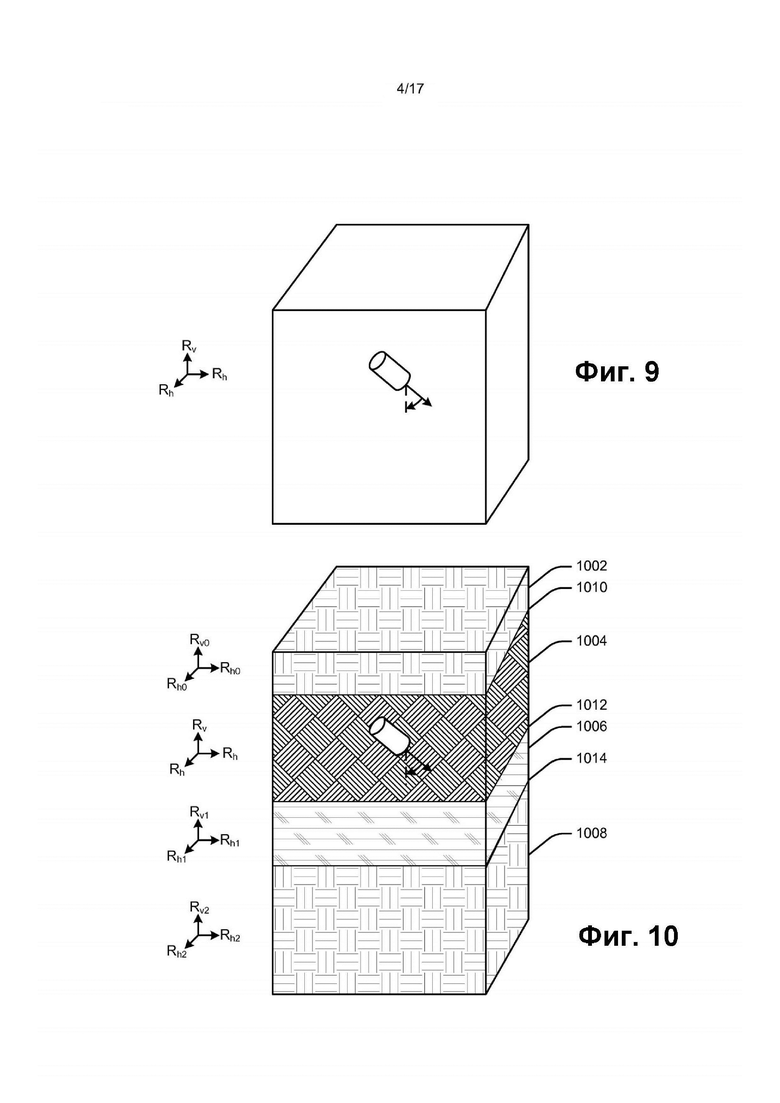
Фиг. 9 и 10 иллюстрируют модели традиционных пластов.
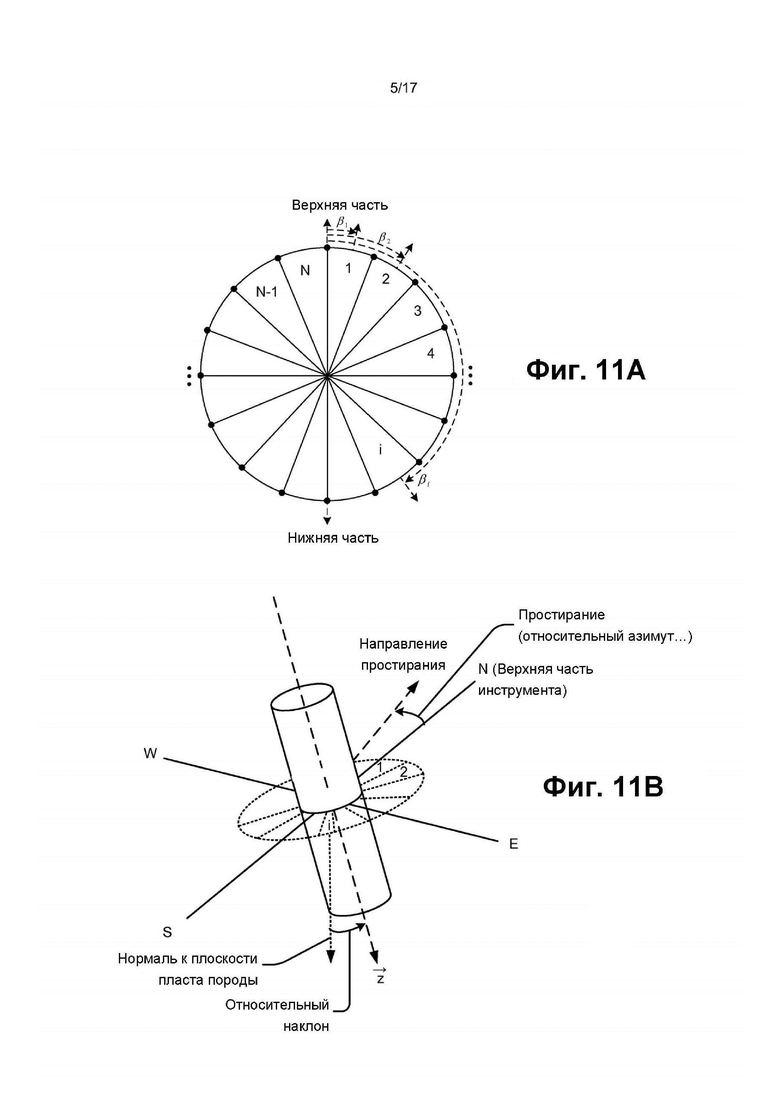
Фиг. 11А иллюстрирует бины.
Фиг. 11В иллюстрирует математические отношения между бинами и пластом, по которому получают данные.
Фиг. 12-15 и 18-19 иллюстрируют моделируемые отклики.
Фиг. 16 и 17 иллюстрируют модели нетрадиционных пластов.
Фиг. 20-23 иллюстрируют схемы расположения антенн.
Фиг. 24 иллюстрирует схему технологического процесса.
Фиг. 25 иллюстрирует среду.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Описанные конфигурации инструмента и операции лучше всего понятны в контексте более крупных систем, в которых они работают. Соответственно, типовая среда каротажа в процессе бурения (КПБ) проиллюстрирована на Фиг. 1. Буровая платформа 2 поддерживает башенную вышку 4, содержащую передвижной блок 6 для подъема и опускания бурильной колонны 8. Ведущая труба 10 поддерживает бурильную колонну 8, когда ту опускают через поворотный стол 12. Буровое долото 14 приводится в движение забойным двигателем и/или вращением бурильной колонны 8. Когда долото 14 вращается, оно образует скважину 16, которая проходит через различные пласты 18. Насос 20 обеспечивает циркуляцию бурового раствора через питающую трубу 22 к ведущей трубе 10, вглубь скважины через внутреннюю часть бурильной колонны 8, через отверстия в буровом долоте 14, обратно на поверхность через кольцевое пространство вокруг бурильной колонны 8 и в сточный резервуар 24. Буровой раствор вымывает шлам из скважины в резервуар 24 и помогает сохранять целостность скважины.
Инструмент электромагнитного каротажа сопротивления 26 интегрирован в компоновку низа бурильной колонны возле долота 14. Когда долото прорезает скважину сквозь пласты, каротажный инструмент 26 собирает измерения, относящиеся к различным характеристикам пласта, а также данные об ориентации и положении инструмента и разных других условиях бурения. Измерения ориентации могут быть выполнены с помощью индикатора азимутальной ориентации, который может содержать магнитометры, инклинометры и/или акселерометры, хотя могут применять другие типы датчиков, такие как гироскопы. В некоторых вариантах реализации изобретения инструмент включает 3-осевой феррозондовый магнитометр и 3-осевой акселерометр. Каротажный инструмент 26 может принимать форму утяжеленных бурильных труб, т. е. толстостенной системы труб, которая обеспечивает вес и жесткость, способствующие процессу бурения. В состав может входить телеметрический переводник 28 для передачи измерений инструмента поверхностному приемнику 30 и получать команды от поверхностного приемника.
Более предпочтительно, чтобы индикатор с угловым положением, расположенный возле каротажного инструмента 26 или телеметрического переводника 28, содержал как 3-осевой феррозондовый магнитометр, так и 3-осевой акселерометр. Как известно в данной области техники, комбинация этих двух систем датчиков обеспечивает измерение торца долота, наклона и углов азимутальной ориентации скважины. Торец долота и углы наклона скважины вычисляют на основании выходного сигнала датчика акселерометра. Выходные данные датчика магнитометра применяют для вычисления азимута скважины. С торцом долота, наклоном скважины и азимутальными данными скважины инструмент в соответствии с данным изобретением может быть применен для направления долота к требуемому пласту. В частности, разность ответа или коэффициент ответа могут эффективно применять с целью войти в требуемый пласт или оставаться в интересующем пласте.
В разные отрезки времени в процессе бурения буровую колонну 8 могут убирать из скважины, как проиллюстрировано на Фиг. 2. Как только бурильную колонну убирают, могут проводить каротажные работы с применением кабельного каротажного инструмента 34, т. е. зонда измерительного прибора, подвешенного на кабеле 42, содержащего проводники для транспортирующей способности к инструменту и телеметрию от инструмента к поверхности. Часть построения изображения по данным метода сопротивлений, входящая в каротажный инструмент 34, может содержать манипуляторы-центраторы 36, которые центрируют инструмент в скважине, когда инструмент вытягивают вверх по скважине. Функция регистрации 44 собирает измерения от каротажного инструмента 34 и включает вычислительные средства для обработки и хранения измерений, собранных каротажным инструментом.
Пласты 18, проиллюстрированные на Фиг. 1, не перпендикулярны скважине, которая может проходить естественным образом или за счет проведения работ направленного бурения. Скважина может иметь систему координат 50, определенную в соответствии со длинной осью скважины (ось z) и северной частью (или в качестве альтернативы, верхней частью) скважины (ось x). Пласты 18, в случае их характеристики в качестве плоскости, могут иметь систему координат 51, определенную в соответствии с нормалью к плоскости (по оси z'') и направлением наискорейшего спуска (ось х''). Как проиллюстрировано на Фиг. 3, обе системы координат связаны двумя вращениями. Начиная с системы координат скважины (х, y, z), делают первое вращение угла γ относительно оси z. Получающаяся система координат обозначена (х', y', z'). Угол γ представляет собой относительный падающий угол, который указывает направление падения пласта относительно системы координат скважины. Затем делают второе вращение угла α относительно оси y'. Это выравнивает систему координат скважины с системой координат пласта. Угол α представляет собой относительный угол наклона, который является углом наклона пластов относительно длинной оси скважины.
Вертикальное удельное сопротивление, как правило, представляет собой удельное сопротивление, измеряемое перпендикулярно к плоскости пласта, горизонтальное удельное сопротивление представляет собой удельное сопротивление, измеряемое в плоскости пласта. Определение каждой из этих характеристик (угол наклона, падающий угол, вертикальное удельное сопротивление и горизонтальное удельное сопротивление) является желательным.
Фиг. 4 иллюстрирует гипотетическую конфигурацию антенны для многокомпонентного инструмента электромагнитного каротажа сопротивления. Инструмент электромагнитного каротажа сопротивления может быть реализован в виде тросового инструмента и в виде инструмента каротажа в процессе бурения. Предложена триада рамочных антенн передатчика TX, TY и TZ, каждая из которых ориентирована вдоль соответствующей оси. Также предложена по меньшей мере одна триада подобным образом ориентированных приемных измерительных катушек R1X, R1Y и R1Z. Для получения измерений сигнала по отношению к амплитуде и фазе сигнала передачи (иногда называемых "абсолютными" измерениями) применяют только одну триаду приемников. Также можно предложить вторую триаду подобным образом ориентированных пар измерительных рамочных антенн приемника R2X, R2Y и R2Z, если необходимы дифференциальные измерения (например, коэффициент амплитуды сигнала или разность фаз между измерительными рамочными антеннами приемника, ориентированными вдоль конкретной оси). Дифференциальные измерения могут предложить увеличенное пространственное разрешение.
Moran и Gianzero в "Effects of Formation Anisotropy on Resistivity Logging Measurements" Geophysics, Vol. 44, No. 7, p. 1266 (1979), отметили, что магнитное поле h в измерительных рамочных антеннах приемника может быть представлено в единицах магнитных моментов m на передатчиках и матрице связи C:

В экспресс-форме уравнение (1) выглядит следующим образом:

где MX, MY и MZ представляют собой магнитные моменты (пропорциональные мощности сигнала передачи), образованные передатчиками TX, TY и TZ, соответственно. HX, HY, HZ представляют собой магнитные поля (пропорциональные мощности сигнала приема) на антеннах приемника RX, RY и RZ, соответственно.
В конфигурации антенны на Фиг. 4, если каждый передатчик возбуждают по очереди и измерения сигнала производят на каждом приемнике в ответ на каждое возбуждение, получают девять абсолютных или дифференциальных измерений. Эти девять измерений обеспечивают определение полной матрицы связи С.  где I представляет собой индекс для приемника RX, RY или RZ, J представляет собой индекс для передатчика TX, TY или TZ, a_IJ представляет собой постоянный коэффициент, определяемый конструкцией инструмента, и
где I представляет собой индекс для приемника RX, RY или RZ, J представляет собой индекс для передатчика TX, TY или TZ, a_IJ представляет собой постоянный коэффициент, определяемый конструкцией инструмента, и  представляет собой сложное значение, обозначающее амплитуду сигнала и фазовый сдвиг, измеряемые приемником I в ответ на возбуждение передатчика J). Получение полной матрицы связи позволяет определить угол наклона, падающий угол, вертикальное удельное сопротивление и горизонтальное удельное сопротивление. Для определения этих характеристик могут применять ряд способов. Например, угол наклона и падающий угол могут определять на основании значений матрицы связи, как объяснили Li Gao и Stanley Gianzero в патент США № 6727706 под названием "Virtual Steering of Induction Tool for Determination of Formation Dip Angle". С учетом этих углов могут определить вертикальное и горизонтальное удельные сопротивления в соответствии с уравнениями, предоставленными Michael Bittar в патенте США № 7019528 под названием "Electromagnetic Wave Resistivity Tool Having a Tilted Antenna for Geosteering within a Desired Payzone". В качестве альтернативы, одновременное решение этих характеристик могут быть найдено в соответствии с описанием в патенте Bittar.
представляет собой сложное значение, обозначающее амплитуду сигнала и фазовый сдвиг, измеряемые приемником I в ответ на возбуждение передатчика J). Получение полной матрицы связи позволяет определить угол наклона, падающий угол, вертикальное удельное сопротивление и горизонтальное удельное сопротивление. Для определения этих характеристик могут применять ряд способов. Например, угол наклона и падающий угол могут определять на основании значений матрицы связи, как объяснили Li Gao и Stanley Gianzero в патент США № 6727706 под названием "Virtual Steering of Induction Tool for Determination of Formation Dip Angle". С учетом этих углов могут определить вертикальное и горизонтальное удельные сопротивления в соответствии с уравнениями, предоставленными Michael Bittar в патенте США № 7019528 под названием "Electromagnetic Wave Resistivity Tool Having a Tilted Antenna for Geosteering within a Desired Payzone". В качестве альтернативы, одновременное решение этих характеристик могут быть найдено в соответствии с описанием в патенте Bittar.
Фиг. 5 иллюстрирует два угла, которые могут быть применены для указания ориентации рамочной антенны. Рамочную антенну могут рассматривать как находящуюся в плоскости, имеющей нормальный вектор. Угол наклона θ представляет собой угол между продольной осью инструмента и нормальным вектором. Азимутальный угол β представляет собой угол между проекцией нормального вектора в плоскости X-Y и разметочной линией инструмента. Кроме того, в контексте скважины азимутальный угол β может представлять собой угол между проекцией нормального вектора в плоскости X-Y и осью х системы координат скважины.
Отмечается, что три ориентации антенны передатчика и три ориентации антенны приемника задействованы в конфигурации антенны на Фиг. 4. Было обнаружено, как описано в Michael Bittar и Guoyu Hu, WO2008/076130, под названием "Antenna Coupling Component Measurement Tool Having Rotating Antenna Configuration", что, когда осуществляют вращение инструмента, можно определить полную матрицу связи с помощью только одной ориентации антенны передатчика и двух ориентаций антенны приемника (или, эквивалентно, одой ориентации антенны приемника и двух ориентаций антенны передатчика). Более того, при определенных предположениях о конфигурации пласта может быть достаточно одной ориентации передатчика и ориентации антенны приемника.
Прежде чем рассматривать различные инструменты, имеющие конкретные конфигурации антенны, описывают электронные устройства, общие для каждого инструмента. Фиг. 6 иллюстрирует функциональную блок-схему электронных устройств для инструмента каротажа сопротивления. Электронные устройства включают блок управления 602, который соединен с аналоговым переключателем 604. Аналоговый переключатель 604 выполнен с возможностью управлять какой-либо из рамочных антенн передатчика T1, T2, T3, T4 при помощи сигнала переменного тока из источника сигнала 606. В некоторых вариантах реализации изобретения источник сигнала обеспечивает радиочастотные сигналы. Блок управления 602, предпочтительно, выбирает рамочную антенну передатчика, делает паузу, достаточно длинную для затухания переходных величин, затем сигнализирует блоку хранения/передачи данных 610 принять выборку амплитуды и фазы сигналов, полученных каждым из приемников. Блок управления 602, предпочтительно, повторяет этот процесс последовательно для каждого из передатчиков. Значения сдвига амплитуды и фазы обеспечивается индикатором сдвига амплитуды и фазы 608, который соединен с каждой из измерительных рамочных антенн приемника R1 и R2 для этой цели.
Блок управления 602 может обрабатывать измерения сдвига амплитуды и фазы с целью получить компенсированные измерения и/или средние значения измерений. Начальные, компенсированные или усредненные измерения могут быть переданы на поверхность для обработки с целью определения углов наклона и падающих углов, вертикального удельного сопротивления, горизонтального удельного сопротивления и другой информации, такой как (i) расстояние до ближайшей границы пласта, (ii) направления ближайшей границы пласта и (iii) удельного сопротивления любых ближайших соседних пластов. Блок хранения/передачи данных 610 может быть соединен с телеметрическим блоком 28 (Фиг. 1) для измерений сигналов передачи на поверхность. Телеметрический блок 28 может использовать любой из нескольких известных способов передачи информации на поверхность, включая, но не ограничиваясь ими, (1) колебания величины давления бурового раствора; (2) жесткая проводниковая система; (3) акустические волны и (4) электромагнитные волны.
Фиг. 7 иллюстрирует инструмент электромагнитного каротажа сопротивления 702, имеющий только две ориентации антенны приемника. Инструмент 702 снабжен одной или более областей 706 уменьшенного диаметра. Проволочная катушка 704 помещается в области 706 и в некоторых вариантах реализации изобретения находится на расстоянии от поверхности сборочного узла 702 на постоянном расстоянии. Для механической поддержки и защиты катушки 704 могут применять непроводящий наполнительный материал (не проиллюстрирован), такой как эпоксидный, резиновый или керамический, в областях уменьшенного диаметра 706. Рамочная антенна 704 представляет собой рамочную антенну передатчика, а рамочные антенны 710 и 712 представляют собой измерительные рамочные антенны приемника. При эксплуатации рамочная антенна передатчика 704 передает запрашивающий электромагнитный сигнал, распространяющийся через скважину и окружающий пласт. Измерительные рамочные антенны приемника 710, 712 обнаруживают запрашивающий электромагнитный сигнал и обеспечивают измерение затухания амплитуды электромагнитного сигнала и фазового сдвига. Для дифференциальных измерений дополнительные измерительные рамочные антенны приемника, параллельные рамочным антеннам 710, 712, могут быть предоставлены на аксиально-раздельном расстоянии. На основании измерений затухания абсолютной или дифференциальной амплитуды и фазового сдвига могут быть определены составляющие матрицы связи и использованы в качестве основания для определения характеристик пласта и в качестве основания для геонавигации.
Рамочная антенна передатчика 704 может находиться на расстоянии около 30 дюймов от измерительных рамочных антенн приемника 710, 712. Измерительные рамочные антенны приемника и передатчика могут содержать всего лишь одну петлю проволоки, хотя множество петель могут обеспечить дополнительную мощность сигнала. Расстояние между рамочными антеннами и поверхностью инструмента предпочтительно в диапазоне от 1/16 дюйма до 3/4 дюйма, но может быть и больше. И рамочная антенна передатчика 704, и рамочная антенна приемника 712 могут иметь угол наклона около 45° и быть выровнены одним и тем же азимутальным углом, а рамочная антенна приемника 710 может иметь угол наклона около 45° и азимут 180° на расстоянии от рамочной антенны приемника 712 (или эквивалентно, угол наклона от минус 45° под тем же азимутальным углом, что и рамочная антенна приемника 712).
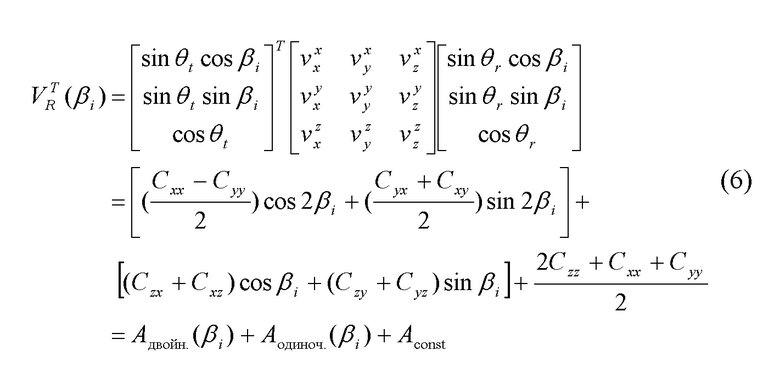
Сигнал, измеряемый наклонно расположенным приемником в ответ на возбуждение наклонно расположенного передатчика, может быть выражен в единицах сигналов  , которые были бы измерены с помощью инструмента по Фиг. 4. Один вариант реализации конфигурации антенны, проиллюстрированной на Фиг. 8, включает наклонно расположенный передатчик (T) и наклонно расположенный передатчик (R). Когда как передатчик, так и приемник ориентированы под одним и тем же азимутальным углом β, сигнал наклонно расположенного приемника представляет собой:
, которые были бы измерены с помощью инструмента по Фиг. 4. Один вариант реализации конфигурации антенны, проиллюстрированной на Фиг. 8, включает наклонно расположенный передатчик (T) и наклонно расположенный передатчик (R). Когда как передатчик, так и приемник ориентированы под одним и тем же азимутальным углом β, сигнал наклонно расположенного приемника представляет собой:
где представляет собой угол наклона передатчика относительно оси z (линия 802 на Фиг. 8), представляет собой угол наклона приемника относительно направления оси z, представляет собой комплексное значение, представляющее амплитуду сигнала и фазовый сдвиг, измеренные приемником в I-направленном диполе в ответ на возбуждение передатчика в J-направленном диполе. Сигнал наклонно расположенного приемника  может представлять собой измерение напряжения или электромагнитного поля. Уравнение (3) может быть также выражено в следующем виде:
может представлять собой измерение напряжения или электромагнитного поля. Уравнение (3) может быть также выражено в следующем виде:
где:

Фиг. 9 иллюстрирует модель традиционного пласта, в которой рассматривают однородную изотропную или трансверсально-изотропную (TI) среду пласта. Для TI среды электрическая характеристика пласта (т. е. удельное сопротивление пласта) в горизонтальной плоскости отличается от электрической характеристики пласта в вертикальной плоскости. Как проиллюстрировано на Фиг. 9, горизонтальная плоскость имеет одинаковый профиль удельного сопротивления (горизонтальное удельное сопротивление, Rh) во всех горизонтальных направлениях и профиль вертикального удельного сопротивления (вертикальное удельное сопротивление, Rv) в вертикальном направлении. Изотропный пласт описывается, если Rv равно Rh, а модель анизотропного пласта определяется, если Rv не равно Rh.
Еще одна модель традиционного пласта, проиллюстрированная на Фиг. 10, состоит из неоднородных слоистых пластов 1002, 1004, 1006, 1008 с TI средой в каждом слое и параллельных границ 1010, 1012, 1014 между каждым слоем.
Во время каротажа в одном варианте реализации изобретения блок управления 602 сортирует выборки по ориентации инструмента, когда выборка была взята в N бинов, таких как те, что проиллюстрированы на Фиг. 11А, в каждом бине, центрированном при βi градусов относительно верхней части инструмента.
С применением моделей традиционного пласта, таких как проиллюстрированные на Фиг. 9 и 10, уравнение (2) может быть упрощено к следующему виду:
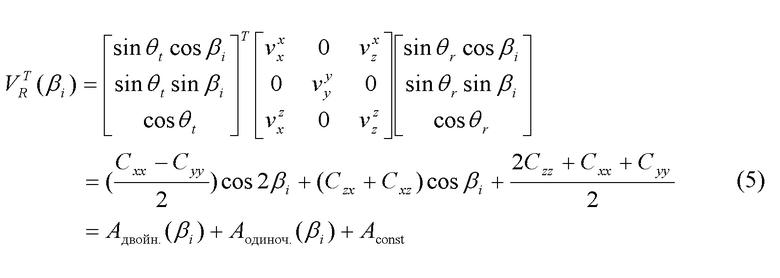
где:
β представляет собой азимутальный угол, соответствующий направлению бина i
на Фиг. 11А, 
 , и
, и
На практике  представляет собой азимутальный угол инструмента относительно направления верхней части инструмента, как проиллюстрировано на Фиг. 11B. "Верхняя часть" инструмента обычно представляет собой направление магнитного севера, определяемое устройством магнитометра, или восходящее направление, определяемое устройством замера силы притяжения. Фиг. 11B также иллюстрирует отношение между направлением простирания пласта (т. е. направлением вдоль линии, представляющей собой пересечение плоскости пласта породы с горизонтальной плоскостью) и верхней частью инструмента. Косинусоидальные сигналы в уравнении (5) (т. е. Адвойн. и Аодиноч.) могут быть применены для расчета падающего угла β0 (или относительного азимута, угол между верхней частью инструмента и направлением простирания пласта) путем исследования сдвига азимута в спектре азимута инструмента. Кроме того, Фиг. 11В иллюстрирует относительный угол наклона, определяемый углом между направлением бурения инструмента (т. е. направлением "z") и нормалью направления к плоскости пласта породы.
представляет собой азимутальный угол инструмента относительно направления верхней части инструмента, как проиллюстрировано на Фиг. 11B. "Верхняя часть" инструмента обычно представляет собой направление магнитного севера, определяемое устройством магнитометра, или восходящее направление, определяемое устройством замера силы притяжения. Фиг. 11B также иллюстрирует отношение между направлением простирания пласта (т. е. направлением вдоль линии, представляющей собой пересечение плоскости пласта породы с горизонтальной плоскостью) и верхней частью инструмента. Косинусоидальные сигналы в уравнении (5) (т. е. Адвойн. и Аодиноч.) могут быть применены для расчета падающего угла β0 (или относительного азимута, угол между верхней частью инструмента и направлением простирания пласта) путем исследования сдвига азимута в спектре азимута инструмента. Кроме того, Фиг. 11В иллюстрирует относительный угол наклона, определяемый углом между направлением бурения инструмента (т. е. направлением "z") и нормалью направления к плоскости пласта породы.
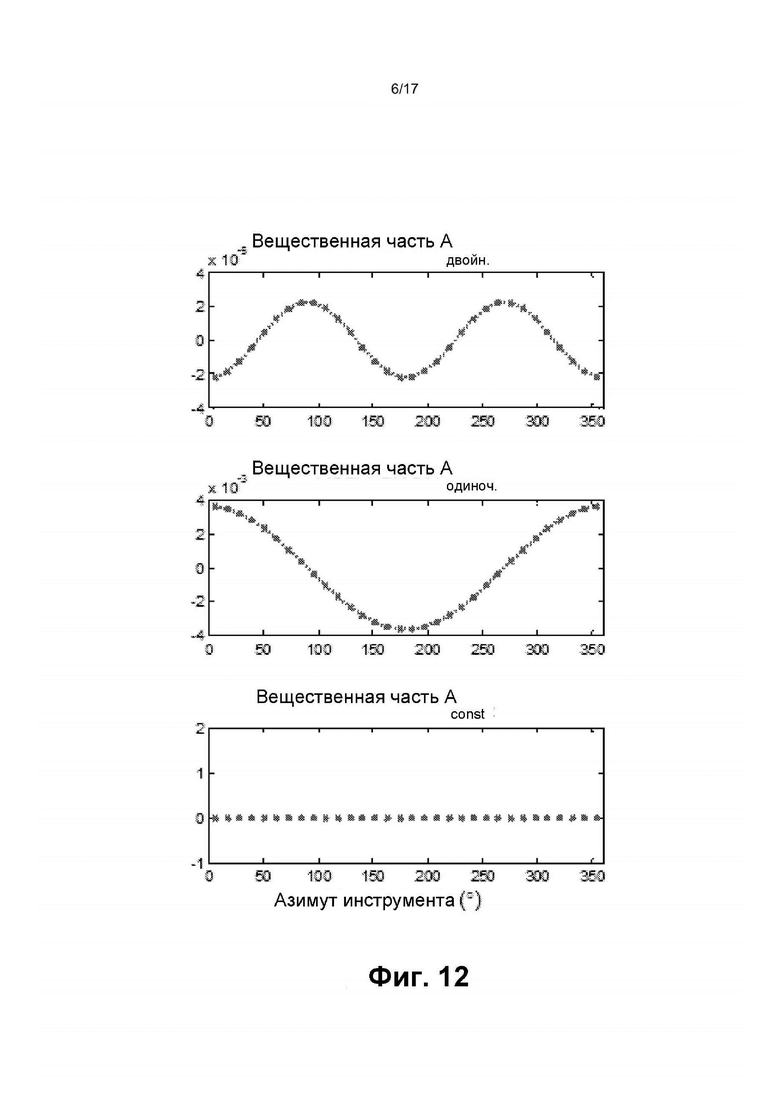
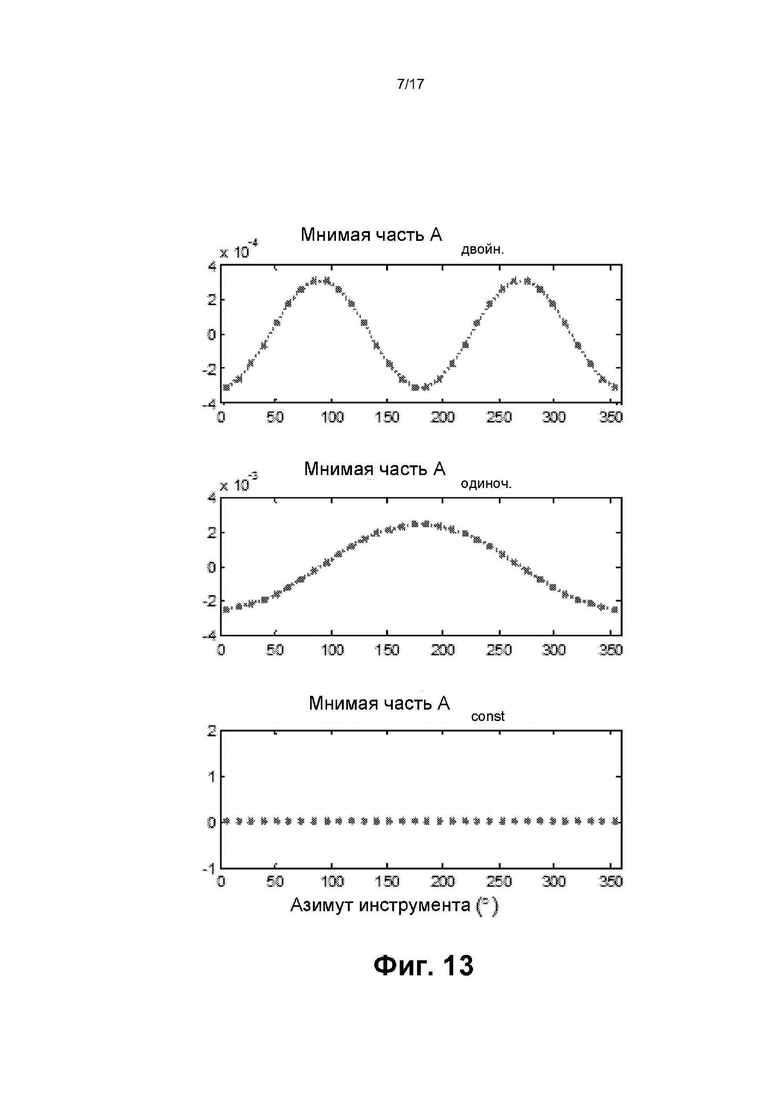
Уравнение (5) содержит три типа сигналов относительно азимутального угла инструмента :
(1) косинусоидальный сигнал с двойными циклами  ,
,
(2) косинусоидальный сигнал с одним циклом , и
(3) постоянный сигнал ( ) независимо от азимута инструмента.
) независимо от азимута инструмента.
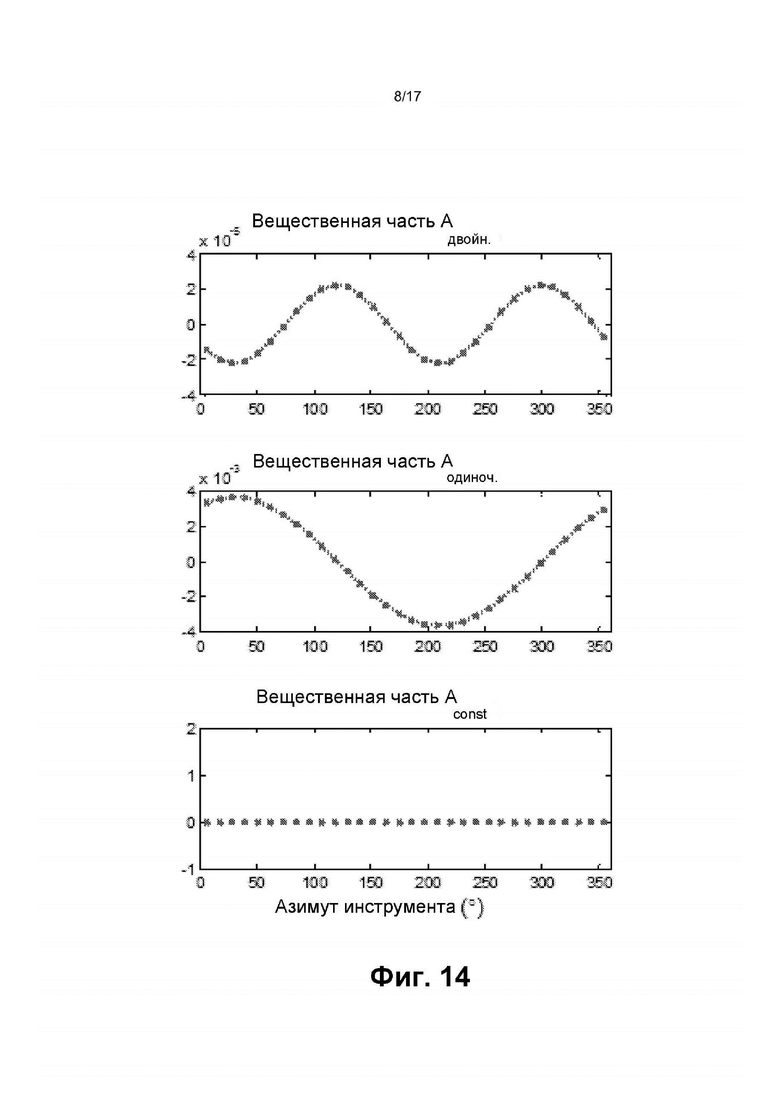
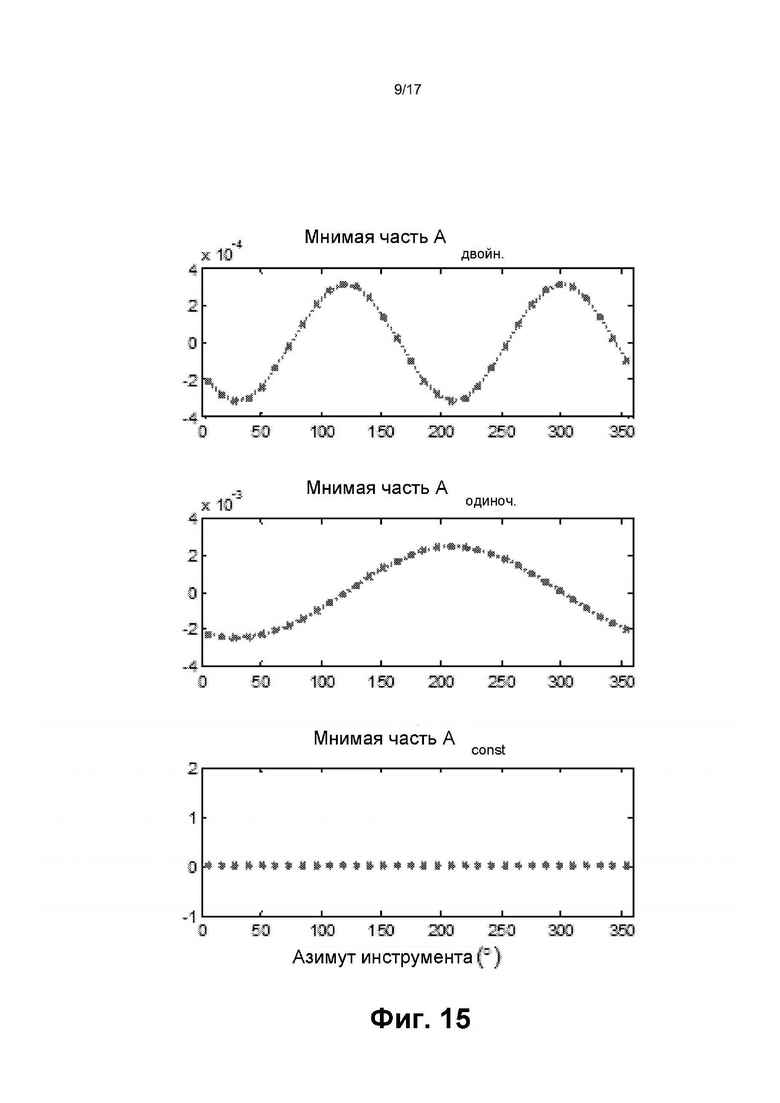
Эти три сигнала представляют собой все комплексные числа, состоящие из вещественной части и мнимой части. Следовательно, уравнение (5) показывает, что и вещественная часть, и мнимая часть косинусоиды должны иметь одинаковый сдвиг по азимутальному углу. Фиг. 12 и 13 иллюстрируют моделируемые отклики азимутального спектра инструмента, входящего в состав конструкции антенны, такой как проиллюстрирована на Фиг. 8 (d=44 дюйма, θt=45°=θr, рабочая частота 125 кГц) в модели традиционного пласта (Rh=0,62 Ом⋅м, Rh=1,68 Ом⋅м, относительный угол наклона 20° и падающий угол 0°). Как проиллюстрировано на Фиг. 12 и 13, вещественная часть и мнимая часть для каждого типа синусоидальных сигналов имеют одинаковый сдвиг по азимутальному углу (то есть пик в вещественной и мнимой частях Адвойн. и пик в вещественной и мнимой частях Аодиноч. происходит при 0°, указывая на падающий угол 0°). Фиг. 14 и 15 представляют те же моделируемые отклики, но с определенной моделью пласта, как на Фиг. 9 или 10 с 30° сдвигом азимута от инструмента. В этом случае вещественная часть и мнимая часть каждого типа синусоиды представляют один и тот же сдвиг азимута (то есть есть пик в вещественной и мнимой частях Адвойн. и пик в вещественной и мнимой частях Аодиноч. происходит при 30°) (выражен в уравнении (5)). Вещественная и мнимая части Адвойн. и Аодиноч. представляют один и тот же сдвиг азимута в спектре азимута инструмента, указывая истинный падающий угол структуры пласта породы.
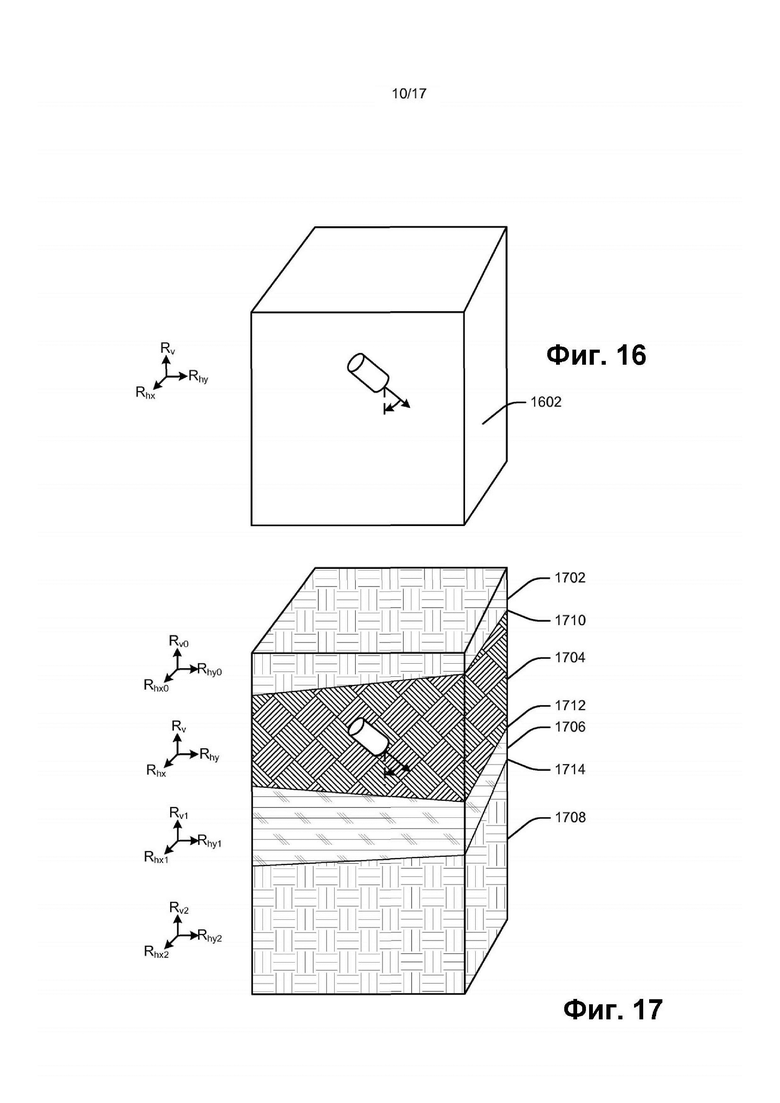
Уравнение (5) не действительно, если инструмент расположен в модели нетрадиционного пласта, такой как модели, проиллюстрированные на Фиг. 16 и 17. Вместо TI среды Фиг. 16 иллюстрирует модель нетрадиционного пласта, состоящую из двух профилей сопротивления в горизонтальной плоскости (Rhx и Rhy). Нетрадиционный пласт 1602, проиллюстрированный на Фиг. 16, имеет три отдельных профиля удельного сопротивления в трехосных направлениях, при этом Rhx и Rhy расположены в горизонтальной плоскости в направлении x и y, соответственно, и Rv указывает вертикальное удельное сопротивление в направлении z. Такую нетрадиционную модель определяют как двухосный анизотропный пласт.
Фиг. 17 иллюстрирует модель нетрадиционного многослойного пласта со слоями 1702 (имеющими профиль удельного сопротивления Rhx0, Rhy0 в горизонтальной плоскости и Rv0 в вертикальной плоскости), 1704 (имеющими профиль удельного сопротивления Rhx, Rhy в горизонтальной плоскости и Rv в вертикальной плоскости), 1706 (имеющими профиль удельного сопротивления Rhx1, Rhy1 в горизонтальной плоскости и Rv1 в вертикальной плоскости) и 1708 (имеющими профиль удельного сопротивления Rhx2, Rhy2 в горизонтальной плоскости и Rv2 в вертикальной плоскости) и с непараллельными границами 1710, 1712, 1714 между слоем.
С такими моделями нетрадиционных пластов, как проиллюстрированы на Фиг. 16 и 17, уравнение (5) больше не действительно, а уравнение (4) может быть выражено следующим образом:
где:
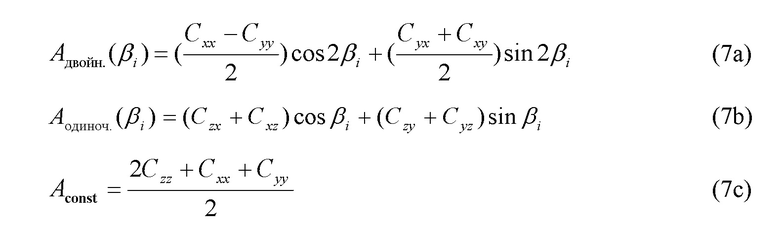
Уравнения (7а) и 7(b) могут быть выражены следующим образом:

где:
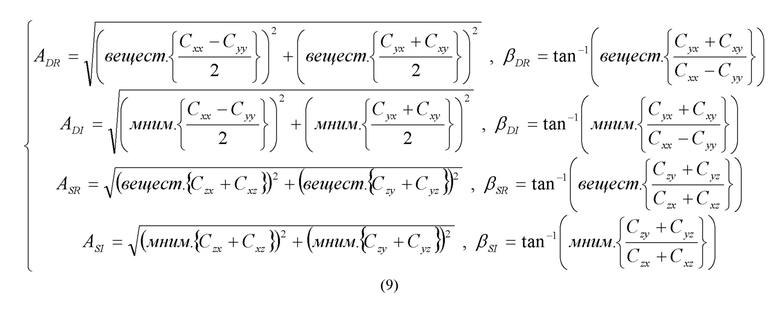
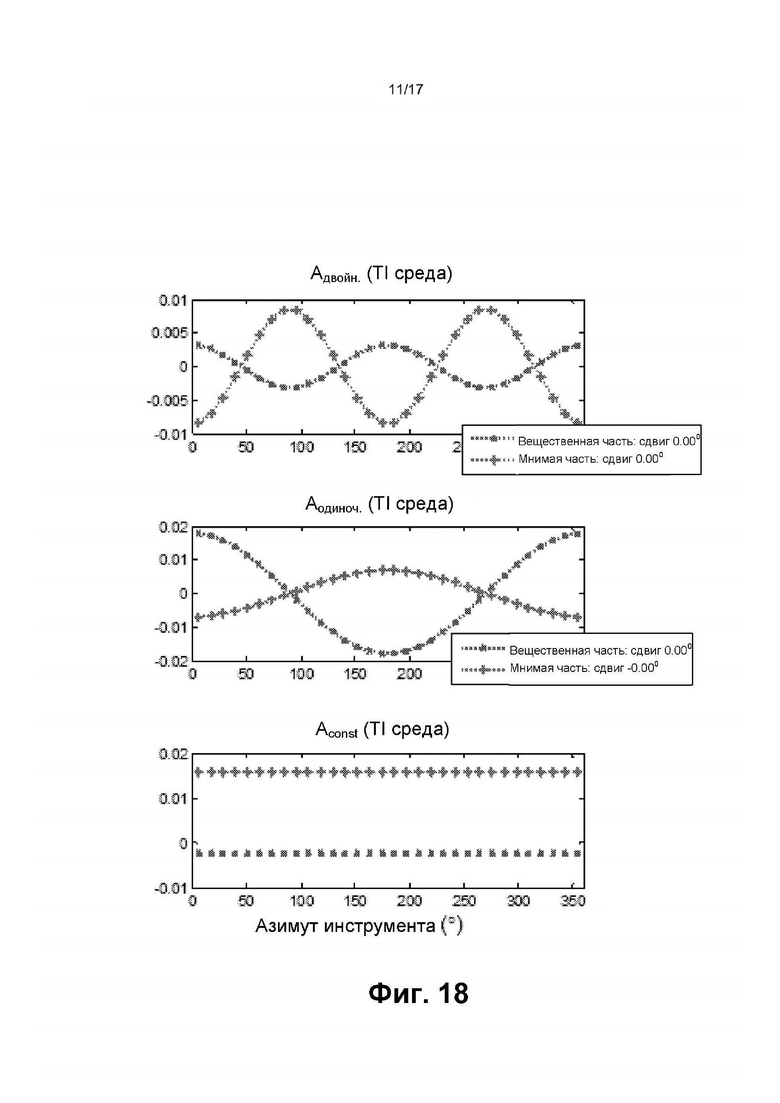
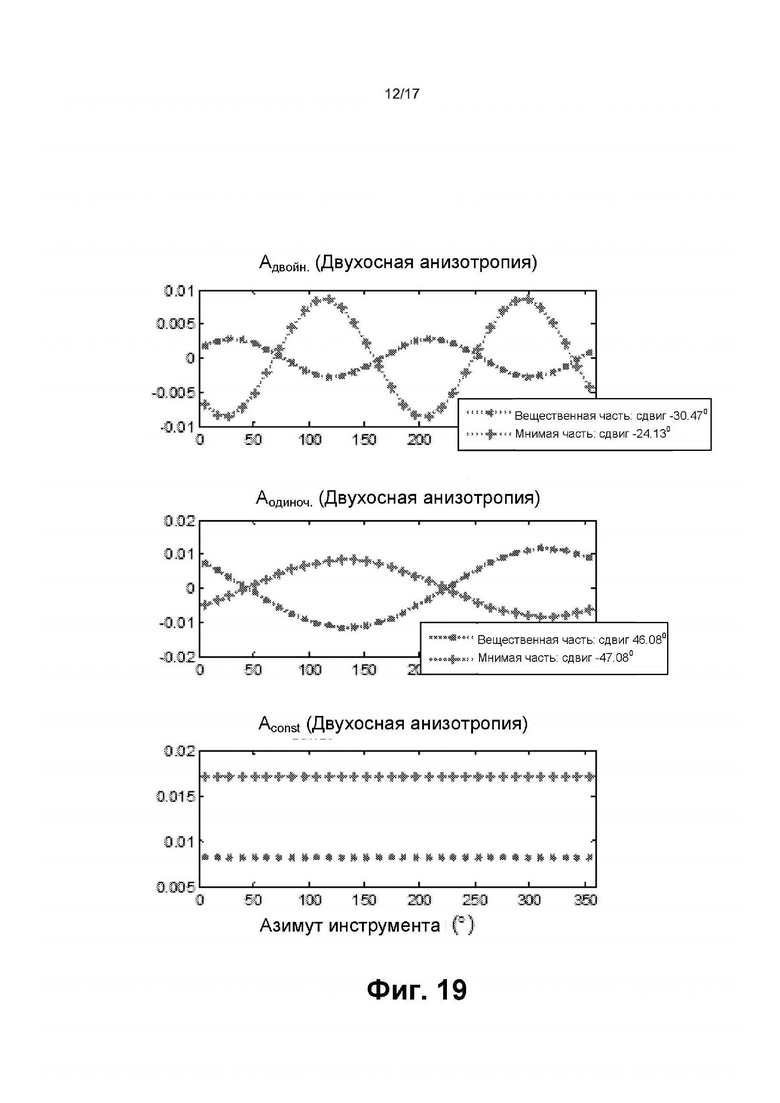
Как видно из уравнений (8а), (8b) и (9), вещественная часть и мнимые части каждого типа синусоиды имеют дополнительный сдвиг азимута  вызванные моделями нетрадиционных пластов. Кроме того, сдвиги азимута для вещественной части и мнимой части различают на основании модели нетрадиционного пласта и измеряемыми множественными составляющими в уравнении (6). Применяя тот же самый интервал и рабочую частоту, что и на Фиг. 12 и 13, Фиг. 18 и 19 иллюстрируют моделируемые отклики спектральных характеристик азимута инструмента для двух различных моделей пласта. Фиг. 18 иллюстрирует графическое отображение для модели традиционного TI пласта (Rh=0,25 Ом⋅м, Rv=2 Ом⋅м, относительный угол наклона 20° и падающий угол 0°). Фиг. 19 иллюстрирует графическое отображение для модели нетрадиционного двухосного анизотропного пласта (Rhx=0,25 Ом⋅м, Rhy=1 Ом⋅м, Rv=2 Ом⋅м, относительный угол наклона 20° и падающий угол 0°). Как проиллюстрировано на Фиг. 19, имеются разности угла между сдвигом азимута в вещественной части по сравнению с сдвиг азимута во мнимой части для синусоид в модели нетрадиционного пласта, особенно для Адвойн.. Истинный падающий угол пласта может быть определен, как описано выше для азимутальных спектров, проиллюстрированных на Фиг. 18. Однако в противоположность этому, из-за разностей угла между сдвигом азимута в вещественной части и сдвигом азимута во мнимой части, трудно определить истинный падающий угол пласта по спектрам азимута, проиллюстрированным на Фиг. 19, с помощью способов, описанных выше.
вызванные моделями нетрадиционных пластов. Кроме того, сдвиги азимута для вещественной части и мнимой части различают на основании модели нетрадиционного пласта и измеряемыми множественными составляющими в уравнении (6). Применяя тот же самый интервал и рабочую частоту, что и на Фиг. 12 и 13, Фиг. 18 и 19 иллюстрируют моделируемые отклики спектральных характеристик азимута инструмента для двух различных моделей пласта. Фиг. 18 иллюстрирует графическое отображение для модели традиционного TI пласта (Rh=0,25 Ом⋅м, Rv=2 Ом⋅м, относительный угол наклона 20° и падающий угол 0°). Фиг. 19 иллюстрирует графическое отображение для модели нетрадиционного двухосного анизотропного пласта (Rhx=0,25 Ом⋅м, Rhy=1 Ом⋅м, Rv=2 Ом⋅м, относительный угол наклона 20° и падающий угол 0°). Как проиллюстрировано на Фиг. 19, имеются разности угла между сдвигом азимута в вещественной части по сравнению с сдвиг азимута во мнимой части для синусоид в модели нетрадиционного пласта, особенно для Адвойн.. Истинный падающий угол пласта может быть определен, как описано выше для азимутальных спектров, проиллюстрированных на Фиг. 18. Однако в противоположность этому, из-за разностей угла между сдвигом азимута в вещественной части и сдвигом азимута во мнимой части, трудно определить истинный падающий угол пласта по спектрам азимута, проиллюстрированным на Фиг. 19, с помощью способов, описанных выше.
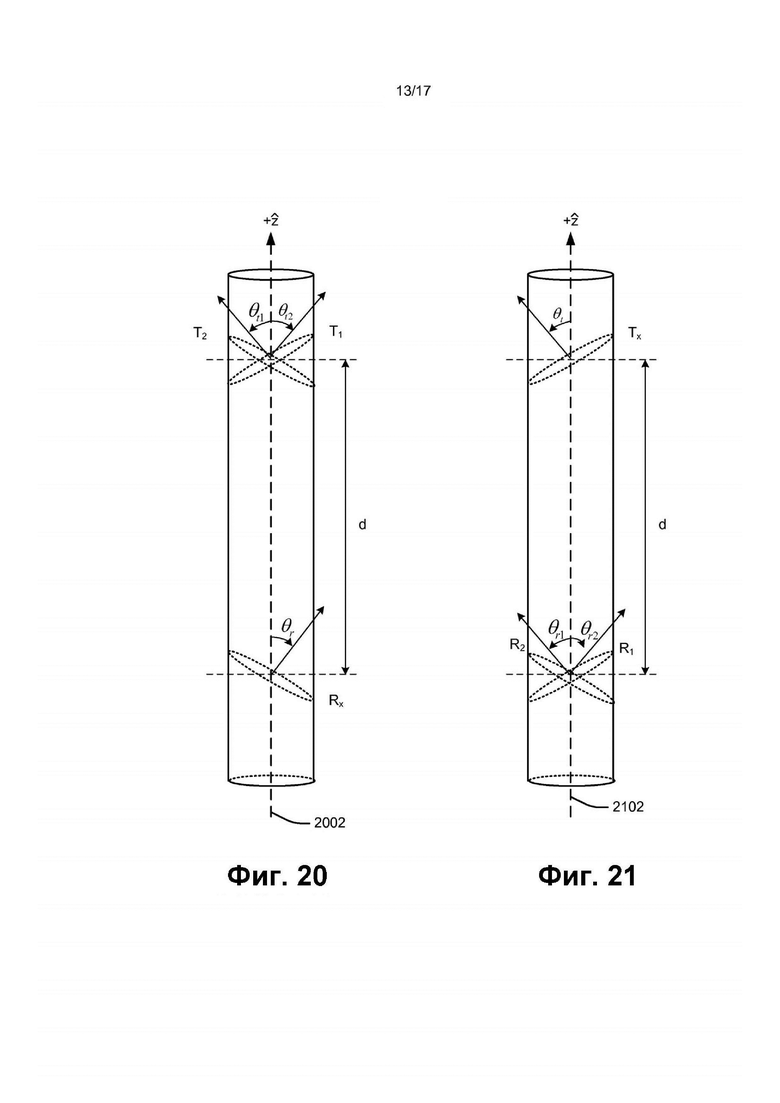
В одном варианте реализации изобретения сигналы нетрадиционного пласта отделяют и характеристики модели нетрадиционного пласта определяют с помощью способов, описанных выше. В одном варианте реализации изобретения несколько конфигураций антенн позволяют системе КПБ собирать и инвертировать данные с целью выдавать характеристики нетрадиционного пласта. В одном варианте реализации изобретения, проиллюстрированном на Фиг. 20, два комплекта систем передатчика-антенны приемника применяют для отделения множественных составляющих в модели традиционного пласта. В одном варианте реализации изобретения, проиллюстрированном на Фиг. 20, оба передатчика (T1 и T2) и приемник (Rx) ориентированы по одному и тому же азимуту инструмента, передатчики наклонены под двумя разными углами по отношению к оси z 2002 (T1 под θt1 и T2 под θt2), и приемник (Rx) наклонен по отношению к оси z 2002 (под θr).
Согласно теореме взаимности, передатчик(и) и приемник(и) являются взаимозаменяемыми. Фиг. 21 иллюстрирует один вариант реализации конструкции антенны с аналогичными функциями, как на Фиг. 20. Вместо двух передатчиков и одного приемника, как на Фиг. 20, Фиг. 21 иллюстрирует два приемника (R1 и R2) и один передатчик (T1). В одном варианте реализации изобретения, проиллюстрированном на Фиг. 21, оба приемника (R1 и R2) и передатчик (Tx) ориентированы по одному и тому же азимуту инструмента, приемники наклонены под двумя разными углами по отношению к оси z 2102 (R1 под θr1 и R2 под θr2), а передатчик (Tx) наклонен по отношению к оси z 2102 (под θt).
В то время как системы, проиллюстрированные на Фиг. 20 и 21, выполнены с возможностью улавливать сигналы нетрадиционных пластов, измерений, полученных в процессе бурения, только с работой в одночастотном режиме недостаточно для отделения таких характеристик пласта. Следовательно, многочастотные измерения включены в системы по Фиг. 20 и 21 с целью обеспечения определения нетрадиционных пластов.
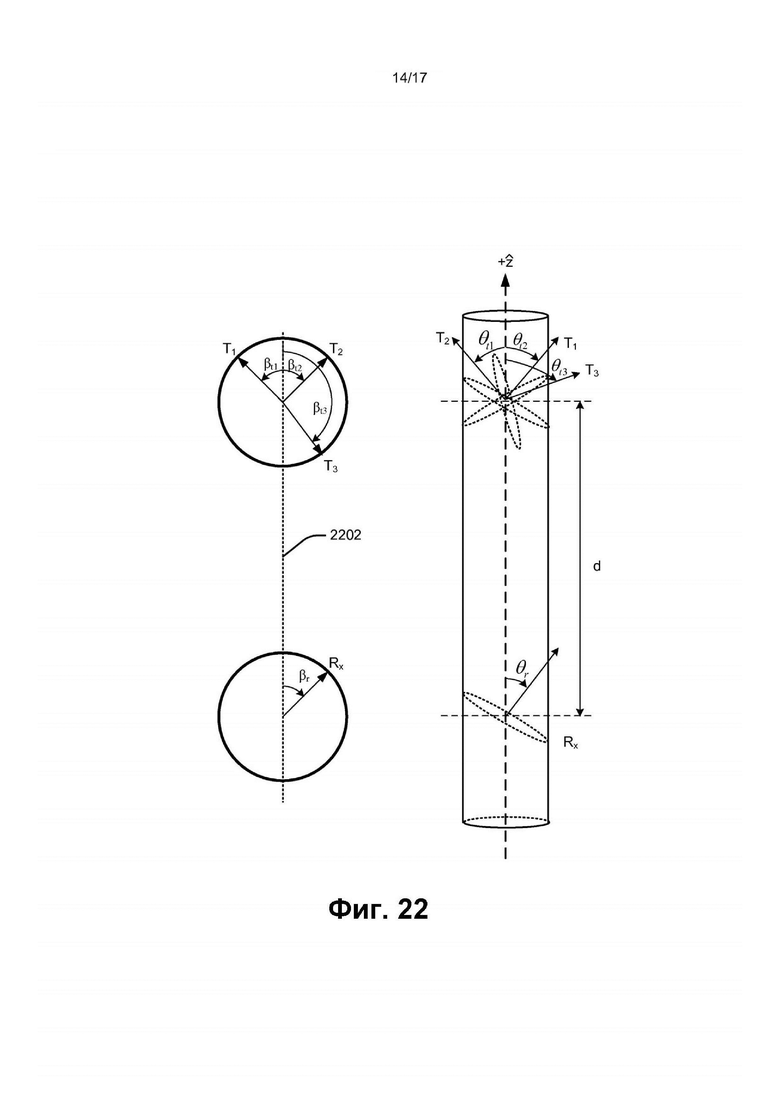
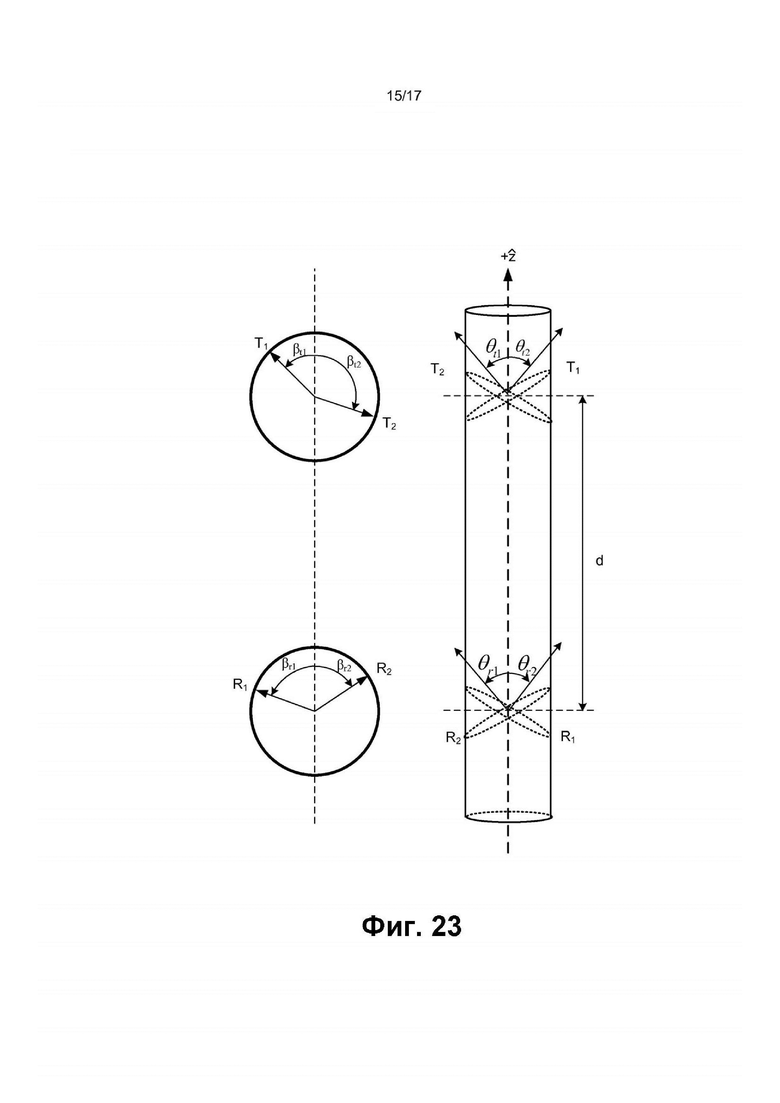
Фиг. 22 и 23 иллюстрируют конструкции антенн, способные улавливать и отделять сигналы нетрадиционного пласта с результатами измерений, полученных на одной рабочей частоте. В варианты реализации изобретения, проиллюстрированные на Фиг. 22 и 23, включены по меньшей мере три комплекта системы передатчик-приемник, при этом каждая ориентация антенны наклонена под определенным углом и ориентирована по определенному азимуту. С дополнительным введением другого азимута антенны измерения из вариантов реализации систем, проиллюстрированных на Фиг. 22 и 23, способны определять и инвертировать характеристики нетрадиционного пласта.
В одном варианте реализации изобретения, проиллюстрированном на Фиг. 22, один передатчик (T1) ориентирован на другой азимут (βt1) относительно падающего угла 2202 в сравнении с ориентацией других двух передатчиков (т. е. T2 под βt2 и T3 под βt3, βt1≠βt2 и βt1≠βt3). В одном варианте реализации изобретения T2 и T3 находятся на одном и том же азимуте (т. е. βt2=βt3), но под разными углами наклона (т. е. θt2≠θt3). В одном варианте реализации изобретения приемник (Rx) наклонен под углом θr и ориентирован на азимутальный угол βr.
В одном варианте реализации изобретения приемники и передатчики по Фиг. 22 взаимозаменяемы.
В одном варианте реализации изобретения, проиллюстрированном на Фиг. 23, каждый передатчик и приемник, ориентированные под другим азимутальным углом и по меньшей мере один передатчик и один приемник наклонены.
В одном практическом варианте реализации системы, проиллюстрированной на Фиг. 22, Rx наклонен под θr=45° и ориентирован на азимут βr=0°, а все три приемника наклонены под βt1=βt2=βt3=45°, но ориентированы под различными азимутальными углами (θt1=0°, θt2=120° и θt3=240°, соответственно).
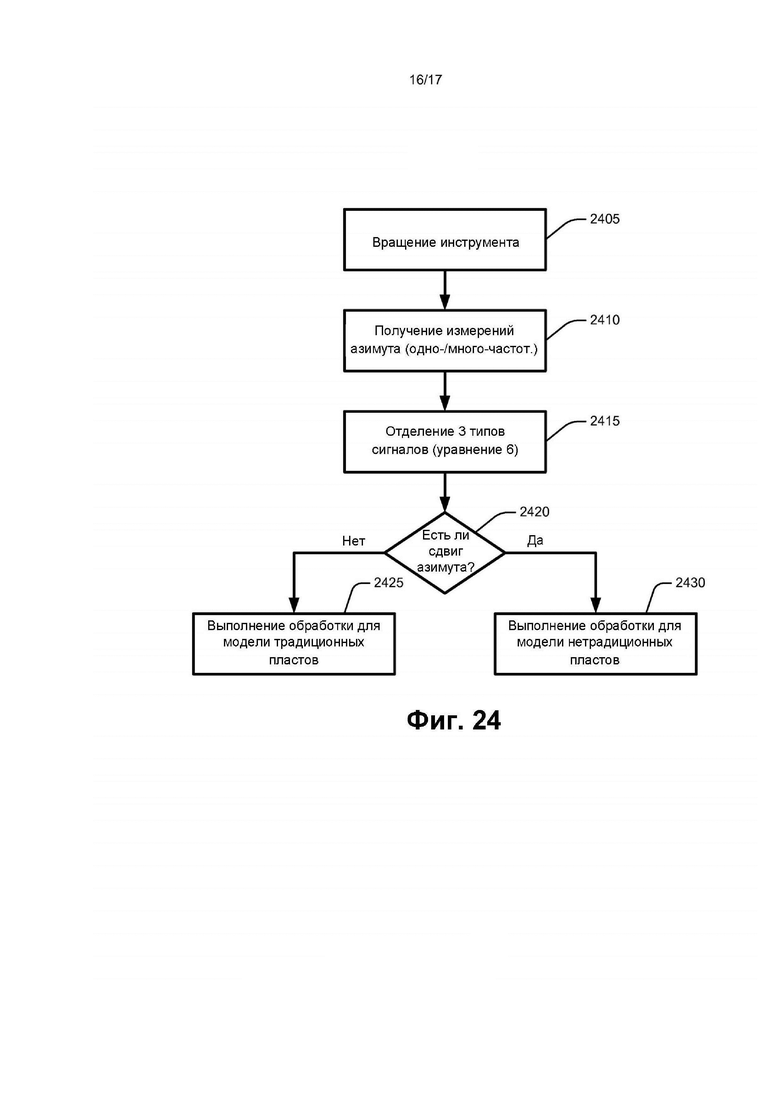
В одном варианте реализации изобретения, проиллюстрированном на Фиг. 24, инструмент 26 вращается (блок 2405). Например, в одном варианте реализации изобретения инструмент 26 представляет собой инструмент КПБ и инструмент 26 вращают в рамках буровых работ. В одном варианте реализации изобретения применяют другую схему для вращения инструмента в проводной среде.
В одном варианте реализации изобретения делают и переводят в бины одно- и/или многочастотные азимутальные измерения (блок 2410). В одном варианте реализации изобретения три типа сигналов (уравнения 7(а), 7(b) и 7(с)) отделяют с помощью уравнения (6) (блок 2415). В одном варианте реализации изобретения Адвойн. и/или Аодиноч. проверяют на тип фазового сдвига, описанного выше, который указывает на то, что выборки были взяты из нетрадиционного пласта (блок 2420). Если фазового сдвига нет, данные обрабатывают, например, путем применения одного или более методов решения обратных задач, подходящих для традиционных пластов, с целью получения характеристик пласта (блок 2425). Если фазовый сдвиг присутствует, данные обрабатывают, например, применяя один или более методов решения обратных задач, подходящих для нетрадиционных пластов, с целью получения характеристик пласта (блок 2430).
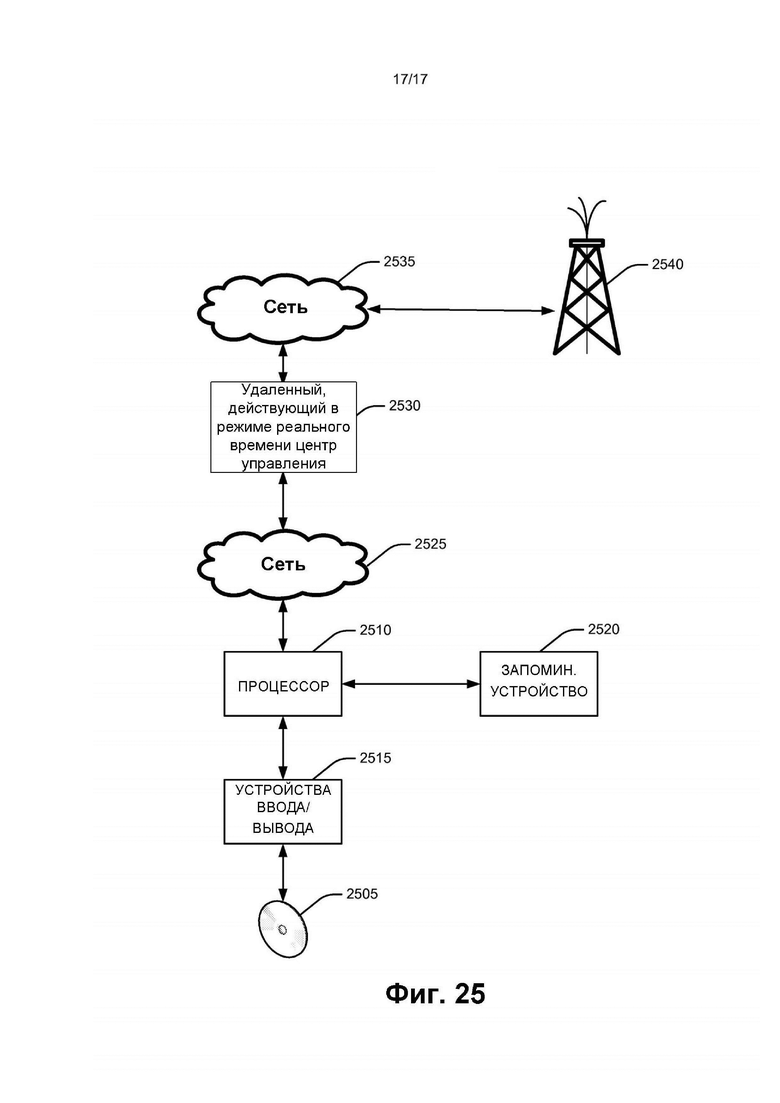
В одном варианте реализации изобретения, проиллюстрированном на Фиг. 25, блоком управления 602 (Фиг. 6) управляют с помощью программного обеспечения в виде компьютерной программы на энергонезависимом машиночитаемом носителе 2505, таком как CD, DVD, USB-накопитель, портативный жесткий диск или другое портативное запоминающее устройство. В одном варианте реализации изобретения процессор 2510, который может быть аналогичным или включенным в блок управления 602, читает компьютерную программу с машиночитаемого носителя 2505 посредством устройства ввода/вывода 2515 и сохраняет его в запоминающем устройстве 2520, где он готовится к выполнению путем компиляции и прописывания ссылок, в случае необходимости, а затем выполняется. В одном варианте реализации изобретения система принимает входные данные через устройство ввода/вывода 2515, такое как клавиатура или клавишная панель, мышь, сенсорная панель, сенсорный экран и т. п., и обеспечивает выходные данные через устройство ввода/вывода 2515, такое как монитор или принтер. В одном варианте реализации изобретения система сохраняет результаты вычислений в запоминающем устройстве 2520 или изменяет вычисления, которые уже существуют в запоминающем устройстве 2520.
В одном варианте реализации изобретения результаты вычислений, которые находятся в запоминающем устройстве 2520, становятся доступными через сеть 2525 для удаленного, действующего в режиме реального времени центра управления 2530. В одном варианте реализации изобретения удаленный, действующий в режиме реального времени центр управления 2530 выдает результаты вычислений, доступные через сеть 2535, с целью помощи в планировании нефтяных скважин 2540 или в бурении нефтяных скважин 2540.
Слово "соединенный" в данном документе означает прямое соединение или косвенное соединение.
Текст выше описывает один или более конкретных вариантов реализации более обширного изобретения. Изобретение также реализуют в различных альтернативных вариантах и, соответственно, оно не ограничено приведенным в данном документе описанием. Вышеприведенное описание варианта реализации данного изобретения представлено с целью иллюстрации и описания. Оно не предназначено быть исчерпывающим или ограничивать изобретение точной описанной формой. В контексте вышеизложенных положений возможны многие модификации и вариации. Предполагают, что объем изобретения будет ограничен не этим подробным описанием, а прилагаемой формулой изобретения.
Изобретение относится к электромагнитному каротажу в процессе бурения. Сущность: получают измерения сигнала, собранные азимутально-чувствительным электромагнитным каротажным инструментом, как функцию местоположения в скважине. Измерения сигнала применяют для определения типа модели пласта. Метод решения обратных задач, соответствующий типу модели пласта, применяют к набору измерений сигнала для определения геофизической характеристики. Геофизическую характеристику применяют для принятия решения о бурении скважины. 3 н. и 16 з.п. ф-лы, 25 ил.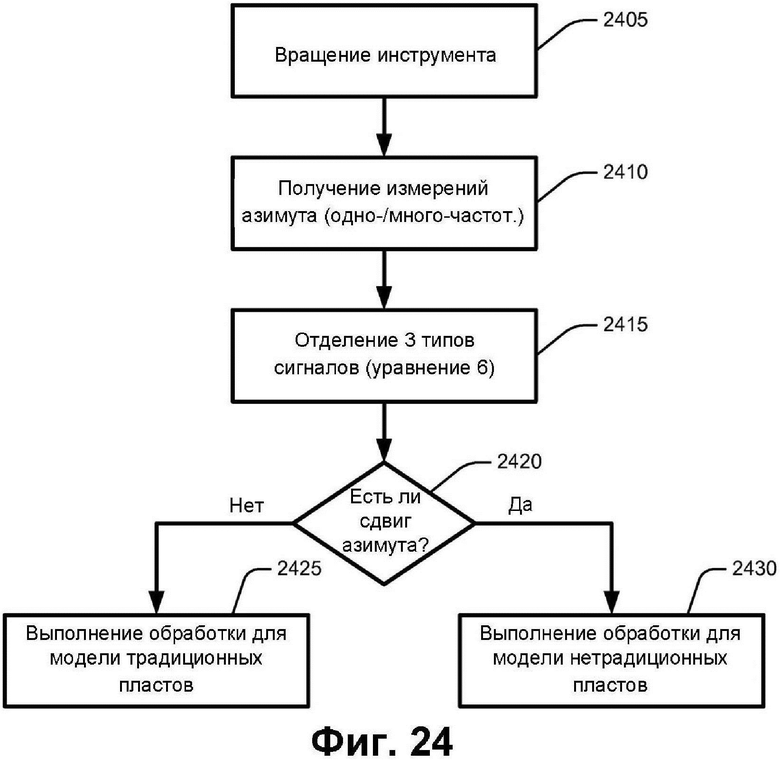
1. Способ электромагнитного каротажа, содержащий:
получение измерений сигнала, собранных азимутально-чувствительным электромагнитным каротажным инструментом, как функции местоположения в скважине;
применение измерений сигнала для определения типа модели пласта;
применение метода решения обратных задач, соответствующего типу модели пласта, к измерениям сигнала для определения геофизической характеристики; и
применение геофизической характеристики для принятия решения о бурении скважины.
2. Способ по п. 1, в котором упомянутое получение измерений сигнала содержит:
обеспечение электромагнитным каротажным инструментом запрашивающего электромагнитного сигнала, распространяющегося через скважину; и
измерение электромагнитным каротажным инструментом затухания амплитуды и фазового сдвига запрашивающего электромагнитного сигнала во множестве местоположений в скважине.
3. Способ по п. 2, в котором запрашивающий электромагнитный сигнал имеет вещественную часть, зависящую от угла азимута инструмента, и мнимую часть, зависящую от угла азимута инструмента; и
при этом упомянутое применение измерений сигнала для определения типа модели пласта содержит:
определение того, что имеются разности угла между сдвигом азимута в вещественной части по сравнению со сдвигом азимута в мнимой части для запрашивающего электромагнитного сигнала; и
исходя из этого определения - отождествление типа модели пласта как модели нетрадиционного пласта, причем нетрадиционный пласт представляет собой двухосный анизотропный пласт.
4. Способ по п. 2, в котором запрашивающий электромагнитный сигнал выражают в виде суммы:
двухчастотного сигнала, представляющего собой косинусоидальный сигнал с двойным циклом при повороте инструмента по азимуту на 360°;
одночастотного сигнала, представляющего собой косинусоидальный сигнал с одним циклом при повороте инструмента по азимуту на 360°; и
постоянного сигнала, не зависящего от поворота инструмента.
5. Способ по п. 3, в котором упомянутое применение метода решения обратных задач, соответствующего типу модели пласта, содержит:
применение метода решения обратных задач, соответствующего модели нетрадиционного пласта.
6. Способ по п. 1, в котором упомянутое получение измерений сигнала содержит:
оснащение электромагнитного каротажного инструмента наклонно расположенными передатчиками А и наклонно расположенными приемниками В, при этом А+В=3, при этом наклонно расположенные передатчики и наклонно расположенные приемники ориентированы под одним и тем же углом азимута инструмента; и
передачу и прием сигналов, содержащих множество частот, через наклонно расположенные передатчики и наклонно расположенные приемники.
7. Способ по п. 1, в котором упомянутое получение измерений сигнала содержит:
оснащение электромагнитного каротажного инструмента наклонно расположенными передатчиками А и наклонно расположенными приемниками В, причем А+В>3, при этом по меньшей мере один из наклонно расположенных передатчиков и наклонно расположенных приемников ориентирован под другим углом азимута инструмента, чем углы азимута инструмента, под которыми ориентированы другие наклонно расположенные передатчики и наклонно расположенные приемники; и
передачу и прием сигналов, содержащих по меньшей мере одну частоту, через наклонно расположенные передатчики и наклонно расположенные приемники.
8. Машиночитаемый запоминающий носитель, содержащий компьютерную программу для электромагнитного каротажа, которая при выполнении на компьютере побуждает компьютер осуществлять:
получение измерений сигнала, собранных азимутально-чувствительным электромагнитным каротажным инструментом, как функции местоположения в скважине;
применение измерений сигнала для определения типа модели пласта;
применение метода решения обратных задач, соответствующего типу модели пласта, к измерениям сигнала для определения геофизической характеристики; и
применение геофизической характеристики для принятия решения о бурении скважины.
9. Машиночитаемый запоминающий носитель по п. 8, в котором электромагнитный каротажный инструмент выполнен с возможностью сбора измерений сигнала путем обеспечения запрашивающего электромагнитного сигнала, распространяющегося через скважину, и измерения затухания амплитуды и фазового сдвига запрашивающего электромагнитного сигнала во множестве местоположений в скважине.
10. Машиночитаемый запоминающий носитель по п. 9, в котором запрашивающий электромагнитный сигнал имеет вещественную часть, зависящую от угла азимута инструмента, и мнимую часть, зависящую от угла азимута инструмента; и
при этом компьютер выполнен с дополнительной возможностью, при упомянутом применении измерений сигнала для определения типа модели пласта:
определения, что имеются разности угла между сдвигом азимута в вещественной части по сравнению со сдвигом азимута в мнимой части для запрашивающего электромагнитного сигнала; и
исходя из этого определения - отождествления типа модели пласта как модели нетрадиционного пласта, причем нетрадиционный пласт представляет собой двухосный анизотропный пласт.
11. Машиночитаемый запоминающий носитель по п. 9, в котором запрашивающий электромагнитный сигнал выражен в виде суммы:
двухчастотного сигнала, представляющего собой косинусоидальный сигнал с двойным циклом при повороте инструмента по азимуту на 360°;
одночастотного сигнала, представляющего собой косинусоидальный сигнал с одним циклом при повороте инструмента по азимуту на 360°; и
постоянного сигнала, не зависящего от поворота инструмента.
12. Машиночитаемый запоминающий носитель по п. 10, в котором при применении метода решения обратных задач, соответствующего типу модели пласта, компьютер выполнен с дополнительной возможностью:
применения метода решения обратных задач, соответствующего модели нетрадиционного пласта.
13. Машиночитаемый запоминающий носитель по п. 8, в котором:
электромагнитный каротажный инструмент оснащен наклонно расположенными передатчиками А и наклонно расположенными приемниками В, причем А+В=3, при этом наклонно расположенные передатчики и наклонно расположенные приемники ориентированы под одним и тем же углом азимута инструмента, и при получении измерений сигнала компьютер выполнен с дополнительной возможностью:
передачи и приема сигналов, содержащих множество частот, через наклонно расположенные передатчики и приемники.
14. Машиночитаемый запоминающий носитель по п. 8, в котором:
электромагнитный каротажный инструмент оснащен наклонно расположенными передатчиками А и наклонно расположенными приемниками В, причем А+В>3, при этом по меньшей мере один из наклонно расположенных передатчиков и наклонно расположенных приемников ориентирован под другим углом азимута инструмента, чем углы азимута инструмента, под которыми ориентированы другие наклонно расположенные передатчики и наклонно расположенные приемники, и при получении измерений сигнала компьютер выполнен с дополнительной возможностью:
передачи и приема сигналов, содержащих по меньшей мере одну частоту, через наклонно расположенные передатчики и приемники.
15. Устройство электромагнитного каротажа, содержащее:
множество антенн, закрепленных на корпусе инструмента; и
процессор, выполненный с возможностью:
получения измерений сигнала, собранных множеством антенн, как функции местоположения в скважине;
применения измерений сигнала для определения типа модели пласта;
применения метода решения обратных задач, соответствующего типу модели пласта, к измерениям сигнала для определения геофизической характеристики; и
применения геофизической характеристики для принятия решения о бурении скважины.
16. Устройство по п. 15, в котором множество антенн содержит:
наклонно расположенные передатчики А и наклонно расположенные приемники В, причем А+В=3, при этом все наклонно расположенные передатчики и наклонно расположенные приемники ориентированы под одним и тем же углом азимута инструмента.
17. Устройство по п. 16, дополнительно содержащее:
передатчик для передачи множества частот через наклонно расположенные передатчики; и
приемник для получения множества частот через наклонно расположенные приемники.
18. Устройство по п. 15, в котором множество антенн содержит:
наклонно расположенные передатчики А и наклонно расположенные приемники В, причем А+В>3, при этом по меньшей мере один из наклонно расположенных передатчиков и наклонно расположенных приемников ориентирован под другим углом азимута инструмента, чем углы азимута инструмента, под которыми ориентированы другие наклонно расположенные передатчики и наклонно расположенные приемники.
19. Устройство по п. 18, дополнительно содержащее:
передатчик для передачи сигналов, содержащих по меньшей мере одну частоту, через наклонно расположенные передатчики; и
приемник для приема сигналов, содержащих по меньшей мере одну частоту, через наклонно расположенные приемники.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 20050083063 А1, 21.04.2005 | |||
| US 7382135 B2, 03.08.2008 | |||
| СПОСОБ ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИБОРА МНОГОКОМПОНЕНТНОГО ИНДУКЦИОННОГО КАРОТАЖА ПРИ УПРАВЛЕНИИ ПАРАМЕТРАМИ БУРЕНИЯ И ПРИ ИНТЕРПРЕТАЦИИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ УДЕЛЬНОГО ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ В ГОРИЗОНТАЛЬНЫХ СКВАЖИНАХ | 2006 |
|
RU2326414C1 |
| Прибор для демонстрирования кажущегося изменения расстояний между звездами на небесном своде | 1926 |
|
SU10951A1 |

