УРОВЕНЬ ТЕХНИКИ
Для современных операций бурения для поиска и добычи нефти требуется большое количество информации, относящейся к параметрам и состоянию скважины. Такая информация обычно включает положение и ориентацию буровой скважины и бурового снаряда, свойства подземных пластов и параметры условий бурения. Сбор информации о свойствах пласта и состояниях скважины, обычно называемый "каротажем", может быть осуществлен непосредственно во время процесса бурения (следовательно, термин "каротажные скважинные измерения во время бурения" или "КВБ" часто используют в одном смысле с термином "скважинные измерения в процессе бурения" или "ИВБ").
Известны различные измерительные инструменты, подходящие для использования в КВБ. Одним таким инструментом является приспособление для каротажа сопротивлений, который содержит одну или большее количество антенн для передачи электромагнитного сигнала в пласт и одну или большее количество антенн для приема прошедшего сквозь пласт ответного сигнала. Работающее на низких частотах приспособление для каротажа сопротивлений может быть названо "индукционным" приспособлением, а работающее на высоких частотах приспособление может быть названо приспособлением для распространения электромагнитной волны. Несмотря на то что физические явления, которые играют решающую роль при измерении, могут меняться в зависимости от частоты, принципы работы приспособления являются неизменными. В некоторых случаях для измерения сопротивления пласта амплитуду и/или фазу принятых сигналов сравнивают с амплитудой и/или фазой переданных сигналов. В других случаях для измерения сопротивления пласта амплитуду и/или фазу множества принятых сигналов сравнивают друг с другом.
При построении диаграммы проложенного курса как функции глубины или положения инструмента в буровой скважине измерения каротажного приспособления называются "регистрацией". Такие регистрации позволяют обнаружить признаки концентраций углеводородов и другую информацию, полезную для инженеров-эксплуатационников и бурильщиков. В частности, азимутально чувствительные регистрации могут предоставлять информацию, пригодную для использования для управления буровым снарядом, поскольку такие регистрации могут сообщить бурильщику о входе скважины в целевой слой пласта или выходе скважины из целевого слоя пласта и, таким образом, предоставить возможность изменения программы бурения, в результате чего могут быть получены более ценные результаты и достигнута более высокая успешность скважины по сравнению с бурением, при котором используют только сейсмические данные. Однако полезность таких регистраций часто ухудшена значительной задержкой между моментом проникновения буровой коронки сквозь границу целевого слоя и сбором данных каротажа, достаточных для предупреждения бурильщика об этом событии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Полное понимание различных описанных вариантов реализации может быть достигнуто после ознакомления с приведенным ниже подробным описанием в сочетании с сопроводительными чертежами, на которых:
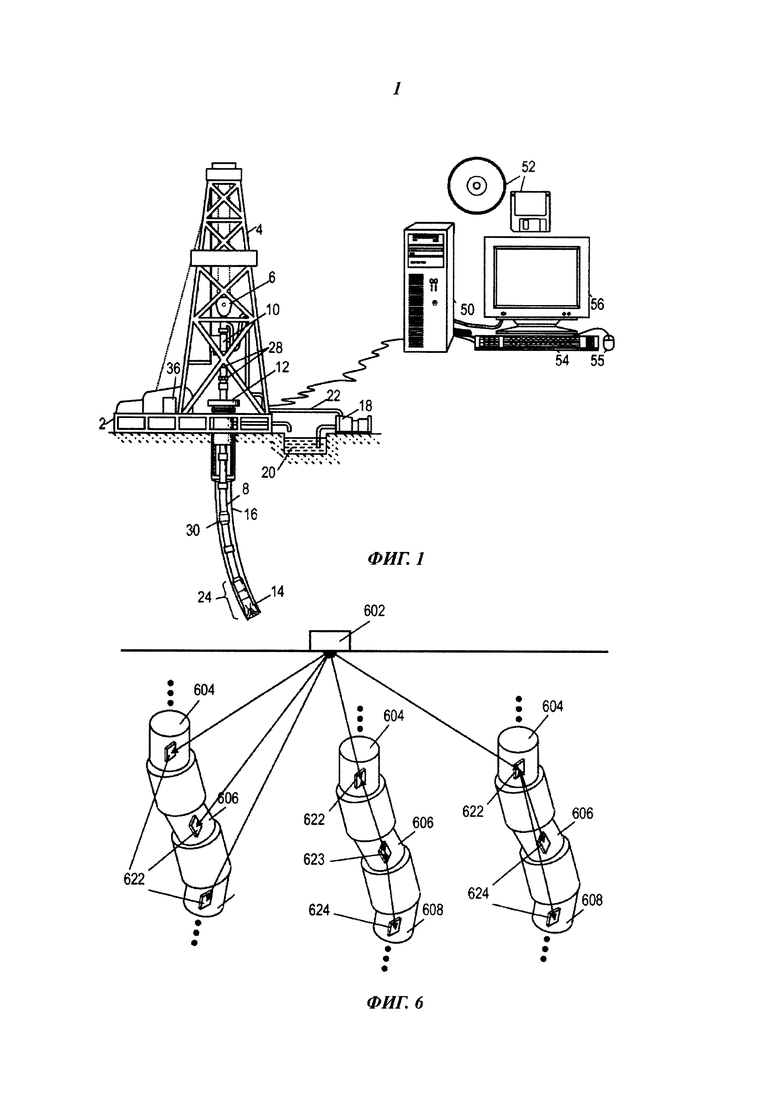
Фиг. 1 показывает пример условий каротажных скважинных измерений во время бурения (КВБ);
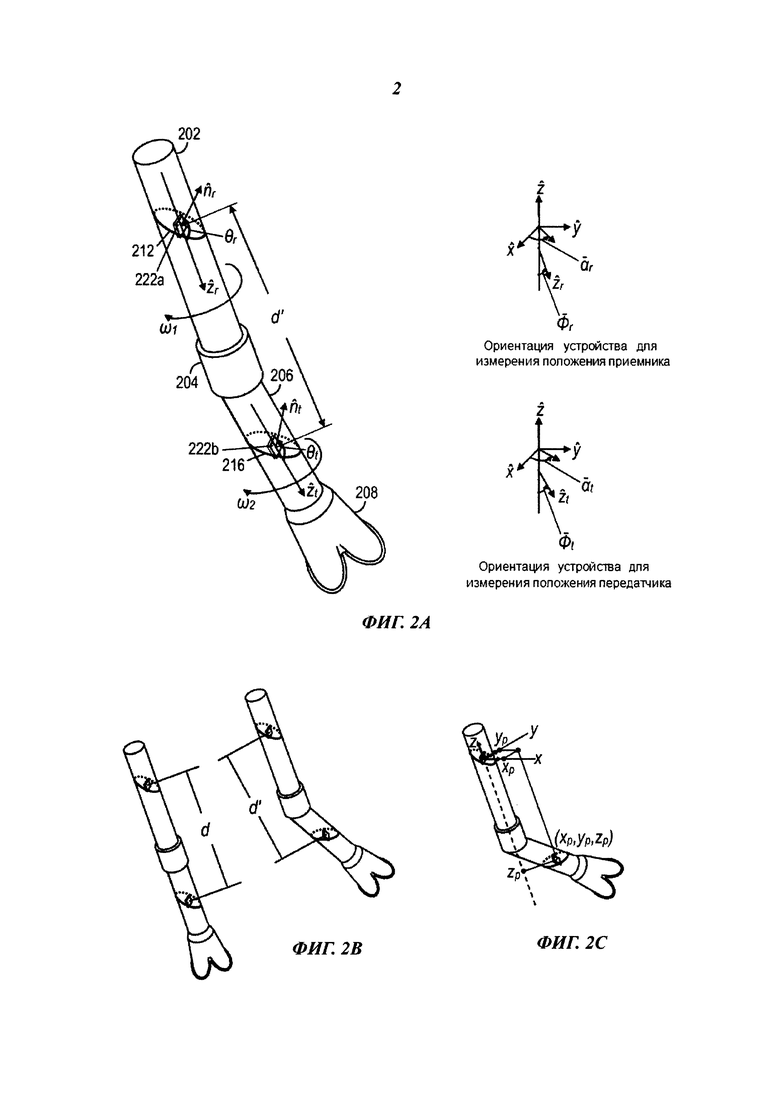
Фиг. 2А показывает буровую колонну с двумя модулями каротажного приспособления;
Фиг. 2В показывает буровую колонну в прямой и изогнутой конфигурациях;
Фиг. 2С показывает проекцию положения антенны в модуле приспособления для КВБ;
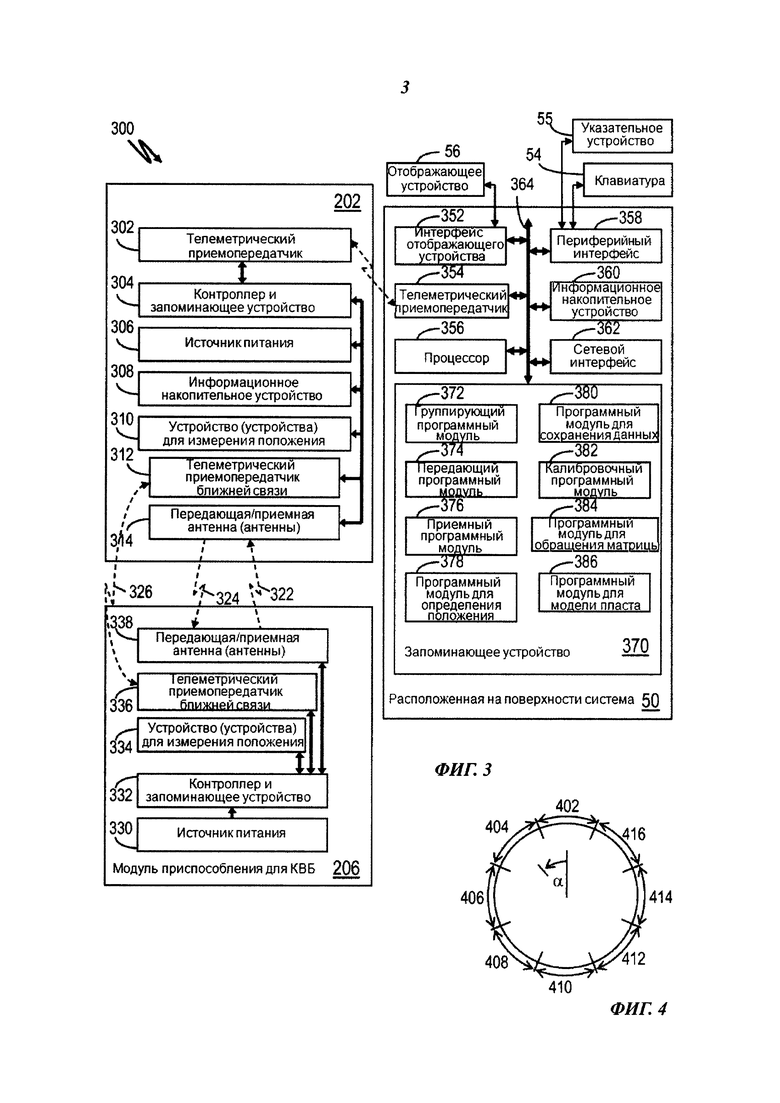
Фиг. 3 показывает блок-схему двух модулей каротажного приспособления и расположенной на поверхности системы;
Фиг. 4 показывает расположение азимутальных интервалов;
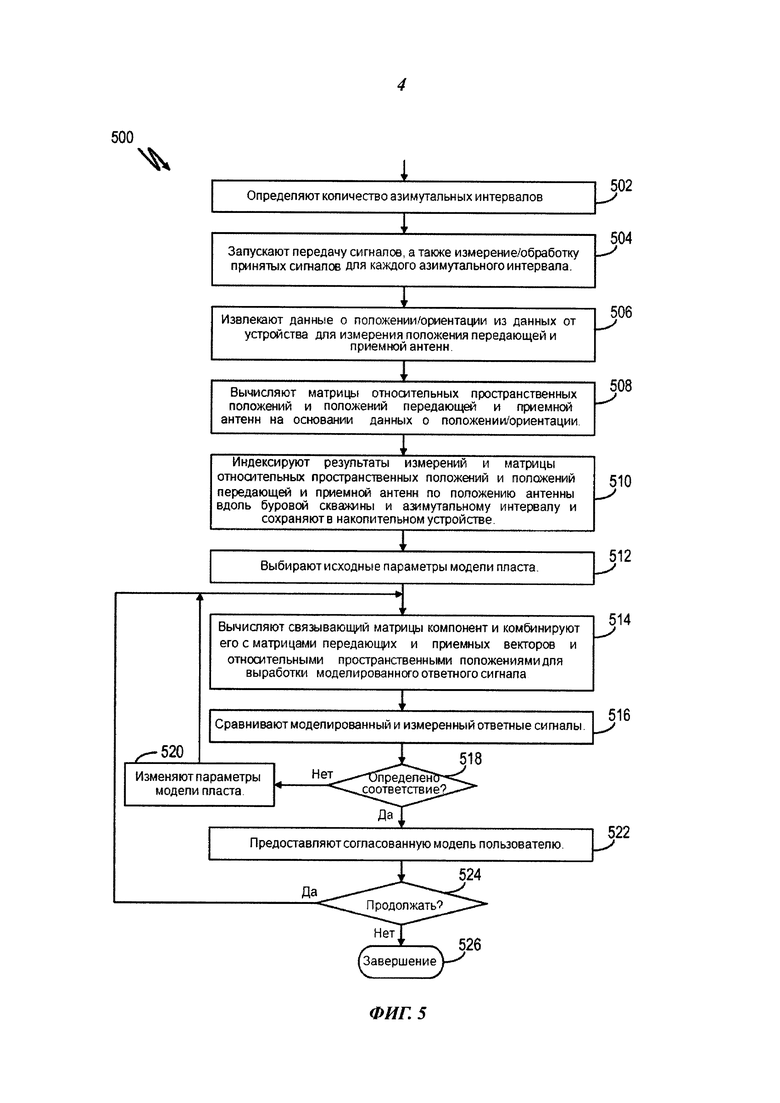
Фиг. 5 показывает блок-схему способа оценки глубокозалегающего пласта.
Фиг. 6 показывает три буровые колонны, каждая из которых содержит три модуля каротажного приспособления.
Следует понимать, что чертежи и соответствующее подробное описание не ограничивают настоящее изобретение, однако они обеспечивают основу для понимания всех модификаций, эквивалентов и альтернатив, которые находятся в пределах объема защиты, определенного пунктами приложенной формулы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В следующих ниже параграфах описаны показанные на чертежах устройства, системы и способы для оценки глубокозалегающего пласта с использованием приспособлений для каротажных скважинных измерений во время бурения ("КВБ"), оснащенных различными модулями, которые могут иметь различные ориентации относительно друг друга. В первую очередь описана показанная на чертежах среда бурения, подходящая для использования такого оборудования, систем и способов, с последующим соответствующим описанием иллюстративной буровой колонны с двумя модулями приспособления для КВБ. Также описаны и математически обоснованы позиционные соотношения между антеннами, размещенными в модулях приспособления для КВБ, как и действие этих соотношений на принятые сигналы, распространенные сквозь окружающую породу. Описаны и показаны на чертежах система и способ, основанный на программном обеспечении, реализованный с использованием указанной системы, с помощью которых может быть осуществлена оценка глубокозалегающего пласта окружающей породы на основании положений антенн (т.е. местоположения и ориентации антенн) и принятых сигналов. Наконец, описаны примеры вариантов реализации, в которых использованы больше двух модулей приспособлений для КВБ.
Описанные устройства, системы и способы лучше всего могут быть поняты в контексте больших систем, в которых они работают. Соответственно, на фиг. 1 показана иллюстративная инструментальная среда для КВБ. Буровая платформа 2 поддерживает буровую вышку 4, имеющую талевый блок 6 для подъема и спуска бурильной колонны 8. Верхний привод 10 поддерживает и вращает бурильную колонну 8 при ее спуске в устье скважины 12. Буровую коронку 14 вращают забойным двигателем и/или вращением бурильной колонны 8. При вращении коронка 14 создает буровую скважину 16, которая проходит сквозь различные пласты. Насос 18 прокачивает буровую текучую среду 20 через питающую трубу 22, через внутреннюю часть бурильной колонны 8 и направляет к буровой коронке 14. Текучая среда выходит сквозь отверстия в буровой коронке 14 и протекает вверх вдоль затрубного пространства вокруг бурильной колонны 8 для транспортировки бурового шлама на поверхность, где текучую среду фильтруют и рециркулируют.
Буровая коронка 14 является только одной частью забойного снаряда 24, которая включает забойный двигатель и одну или большее количество "утяжеленных бурильных труб" (толстостенных стальных труб), которые обеспечивают вес и структурную жесткость для облегчения процесса бурения. Некоторые из утяжеленных бурильных труб включают встроенные каротажные инструменты для сбора результатов измерений различных параметров режима бурения, таких как местоположение, ориентация, осевая нагрузка на коронку, диаметр скважины и т.п. Ориентация инструмента может быть определена углом торца бурильного инструмента (угловой ориентацией), углом наклона (наклоном) и азимутальным углом, каждый из которых может быть извлечен из результатов измерений посредством магнитометров, кренометров и/или акселерометров, несмотря на то что согласно другому варианту реализации могут быть использованы датчики других типов, такие как гироскопы. Согласно одному конкретному варианту реализации инструмент включает трехосевой феррозондовый магнитометр и трехосевой акселерометр. Как известно, комбинация двух таких систем датчиков обеспечивает возможность измерения угла торца бурильного инструмента, угла наклона и азимутального угла. Такие ориентационные измерения могут быть комбинированы с гироскопическими или инерционными измерениями для определения точного положения скважинного инструмента.
Также, в забойный снаряд 24 бурильной колонны может быть включен телеметрический переводник, который поддерживает канал связи с поверхностью. Гидроимпульсная телеметрическая связь является одним общим способом телеметрической связи для передачи результатов измерений от инструмента расположенным на поверхности приемникам и приема команд от поверхности, но также могут быть использованы телеметрические способы. В некоторых способах (например, способе акустической передачи сигналов через стенки) бурильная колонна 8 включает один или большее количество репитеров 30 для обнаружения, усиления и повторной передачи сигнала. На поверхности преобразователи 28 преобразуют сигналы из механической в электрическую форму и обратно для обеспечения возможности приема модулем 36 сетевого интерфейса сигнала по восходящему каналу от телеметрического переводника и (по меньшей мере согласно некоторым вариантам реализации) передачи сигнала по нисходящему каналу к телеметрическому переводнику. Система 50 для обработки данных принимает цифровой телеметрический сигнал, демодулирует его и отображает полученные от инструмента данные или каротажные диаграммы для пользователя. Программное обеспечение (представленное на фиг. 1 как сохраненное в энергонезависимом информационном накопительном устройстве 52) управляет работой системы 50. Пользователь взаимодействует с системой 50 и ее программным обеспечением 52 посредством одного или большего количества устройств 54 и 55 ввода и одного или большего количества устройств 56 вывода. В некоторых вариантах реализации системы бурильщик использует указанную систему для принятия геонавигационных решений и передачи соответствующих команд забойной компоновке 24.
Буровая колонна на фиг. 1 иллюстрирует направленные буровые работы, в которых бурение выполняют вдоль непрямого вертикального пути в нижнем направлении. По меньшей мере согласно некоторым иллюстративным вариантам реализации изменение направления бурения осуществляют посредством "отклоняющего переводника", который представляет собой трубчатую секцию, расположенную вдоль буровой колонны рядом с буровой коронкой, которая является искривленной или изогнутой. Изгиб или кривизна могут быть фиксированными или изменяющимися в зависимости от направления бурения, определяемого только одним изгибом или комбинацией изгиба и вращения буровой колонны. Например, если для приведения в действие буровой коронки будет использоваться забойный двигатель, и буровая колонна с неподвижным отклоняющим переводником поддерживается в неподвижной ориентации по азимуту, указанная бурильная колонна будет постепенно изменять направление в направлении изгиба. Если вместо этого указанная буровая колонна будет вращаться, бурение будет прогрессировать вдоль линии, параллельной секции буровой колонны выше изгиба и вокруг которой прецессирует буровая коронка.
Для бурильных колонн, выполненных с возможностью изменения угла отклоняющего переводника, указанный переводник устанавливают с необходимым углом и в необходимом направлении, в то время как буровая колонна поддерживается в необходимой фиксированной азимутальной ориентации с буровой коронкой, приведенной в действие забойным двигателем. Такое бурение иногда называют "бурением забойным двигателем", поскольку буровая колонна скользит в буровой скважине без вращения. Согласно другим вариантам реализации буровая колонна продолжает вращаться, и угол отклоняющего переводника поддерживается путем приложения силы к буровой колонне в конкретном направлении. При этом переводник взаимодействует со стенкой ствола буровой скважины напротив необходимого направления бурения для создания угла между трубами буровой колонны и/или модулями забойного снаряда и любой стороной переводника. Такие системы иногда называют роторно-управляемыми системами.
Благодаря изменению угла, введенному вышеописанными переводниками и системами, используемыми при наклонном бурении, а также изгибам, сформированным в буровой колонне результирующей буровой скважиной, модули каротажного приспособления, размещенные вдоль буровой колонны, можно ориентировать в различных направлениях. Это, в частности, относится к каротажным приспособлениям, используемым при оценке глубокозалегающего пласта (т.е. приспособлениям, в которых передающая антенна отстоит от приемной антенны по меньшей мере на 20 футов), поскольку передающая и приемная антенны, используемые в таких приспособлениях, могут быть размещены в модулях каротажного приспособления, которые разделены увеличенными расстояниями (по сравнению с другими каротажными приспособлениями) для достижения необходимого проникновения переданных сигналов в породу. Чем больше расстояние между модулями каротажного приспособления, тем большие разности угла наклона и угла набегания могут быть достигнуты между секциями буровой колонны, пересекающими трассу ствола скважины, которая является изогнутой или другим способом отличающейся от прямой линии. Используемый в настоящей заявке угол наклона модуля приспособления для КВБ, в котором размещена антенна, определен как угол между вертикальной осью Z и осью Z буровой колонны по месту нахождения указанной антенны. Угол набегания определен как угол между эталонным вектором, нормальным к вертикальной оси Z, и проекцией оси Z буровой колонны по месту нахождения указанной антенны на горизонтальную плоскость x-y.
На фиг. 2А показан иллюстративный вариант реализации каротажного приспособления для оценки глубокозалегающего пласта, который содержит два модуля 202 и 206 приспособления для КВБ, расположенные в различных местах вдоль буровой колонны и имеющие различные ориентации. В показанном на чертеже варианте реализации приемная антенна 212 каротажного приспособления для измерения истинного удельного сопротивления и соответствующее измерительное устройство 222a для измерения положения приемной антенны размещены в модуле 202 приспособления для КВБ, в то время как передающая антенна 216 каротажного приспособления для измерения истинного удельного сопротивления и соответствующее измерительное устройство 222b для измерения положения передающей антенны (компоненты "наддолотного" инструмента) размещены внутри модуля 206 приспособления для КВБ. Устройства для измерения положения определяют положение каждой соответствующей антенны, которое может быть представлено, например, углом поворота каждой антенны (углами θr и θt относительно осей zr и zt соответственно, в общем, фиксированными и известными), азимутальным углом каждой антенны (углами αr и αt относительно оси x), углом наклона каждого модуля приспособления для КВБ (углами ϕr и ϕt) и расстоянием d' между антеннами. Для определения положений антенны (например, относительно эталонного положения на поверхности) могут быть использованы различные способы, некоторые из которых описаны ниже более подробно. Следует отметить, что, несмотря на то что углы отклоняющего переводника обычно меньше чем 5°, на чертежах показаны намного увеличенные углы для более наглядной иллюстрации эффекта влияния углов на относительные пространственные положения антенн, как описано более подробно ниже.
Вышеописанные ориентации антенны и модуля приспособления для КВБ могут быть использованы для калибрования сигналов приспособления перед выполнением процесса инверсии для моделирования окружающей породы. Такую калибровку выполняют чтобы обеспечить возможность сравнения моделированных и измеренных результатов, поскольку моделированные результаты предполагают известные и неподвижные ориентации и пространственные положения передающей и приемной антенн каротажного приспособления, измеряющего истинное удельное сопротивление пласта, относительно друг друга, но измеренные результаты могут быть получены при любой из множества различных относительных ориентаций и пространственных положений антенн помимо предполагаемых при моделировании. Измеренные и моделируемые результаты могут быть представлены, например, в форме комплексных напряжений, комплексных токов, значений удельного сопротивления, извлеченных из измеренных/смоделированных напряжений и/или токов, и/или отношений напряжений, токов и/или удельных сопротивлений. Одна часть указанной калибровки может быть выполнена математически в форме одной или большего количества матриц вращения, в то время как другая часть может быть выполнена в форме дериватива относительных пространственных положений и/или расстояний между антеннами на основании местоположения и ориентации антенн. Результирующий калиброванный ответный сигнал используют в качестве входного для инверсии при моделировании пласта.
Уравнение (1), представленное в упрощенном виде уравнением (2), иллюстрирует этап процесса калибровки, на котором осуществляется вращение, с учетом каждого из вышеуказанных углов:
 ,
,

где матрица 

матрица Vmatrix(t0) является матрицей напряжения 3×3, состоящей из девяти компонентов  . Каждый компонент представляет теоретическое напряжение, наведенное в приемной антенне, имеющей осевую ориентацию j (относительно осей x, y или z), в ответ на сигнал от передающей антенны с осевой ориентацией i (также относительно осей x, y или z) для данной модели пласта, данной рабочей частоты и данного разнесения d'.
. Каждый компонент представляет теоретическое напряжение, наведенное в приемной антенне, имеющей осевую ориентацию j (относительно осей x, y или z), в ответ на сигнал от передающей антенны с осевой ориентацией i (также относительно осей x, y или z) для данной модели пласта, данной рабочей частоты и данного разнесения d'.
Другая часть калибровки может включать определение расстояния между передающей антенной и приемной антенной. Расстояние между передающей и приемной антеннами изменяются, когда два или большее количество модулей приспособления для КВБ расположены таким образом, что их оси совпадают с общей осью Z. Например, как показано на фиг. 2А, оба модуля 202 и 206 приспособления для КВБ наклонены таким образом, что каждая ось Z (zr и zt) имеет различный угол наклона ϕ (ϕr и ϕt) относительно вертикальной эталонной оси Z. Изменение угла наклона уменьшает исходное расстояние между приемной и передающей антеннами 212 и 216 от исходного расстояния d, когда буровая колонна является прямой (отклоняющий переводник 204 установлен под углом 0°), до расстояния d'. Это уменьшение показано на фиг. 2В, на котором показана буровая колонна, показанная на фиг. 2А в прямой и изогнутой конфигурациях, причем указанное уменьшение расстояния также может быть результатом изгиба буровой колонны в длинных изогнутых и/или нерегулярных буровых скважинах. Уменьшение расстояния может быть значительным для каротажных приспособлений с высокой разрешающей способностью, где разность между расстояниями d и d' может быть сопоставима с разрешающей способностью каротажного приспособления. Например, для предварительного инструмента расстояние между передающей и приемными антеннами может составлять 100 футов, в результате чего в стволах скважин, имеющих значительный изгиб и/или неравномерность, разности между исходным и калиброванным расстоянием могут составлять в некоторых случаях по меньшей мере больше чем 10 футов.
Для определения калиброванного расстояния d' могут быть использованы различные известные способы. Например, с учетом известного исходного расстояния d между двумя модулями приспособления для КВБ, как показано на фиг. 2А, когда они прямые и выровнены относительно друг друга, расстояние d' может быть определено регулировкой исходного расстояния d с использованием уравнения:

Для других более сложных конфигураций могут потребоваться различные тригонометрические и/или геометрические вычисления на основании абсолютных, а не относительные положений. Например, с использованием пространственных координат можно описать положения передающей и приемной антенн относительно эталонной точки на поверхности с разностями x, y и z координат каждой антенны, используемыми для определения расстояния d' между указанными двумя антеннами. После вычисления калиброванное расстояние вместе с калиброванным смоделированным ответным сигналом подвергают процессу обращения, в результате которого определяются параметры модели, которые позволяют сформировать смоделированный ответный сигнал, согласованный с измеренными значениями для передающей и приемной антенн, разнесенных на калиброванное расстояние d', как описано более подробно ниже.
В дополнение к использованию одного только расстояния, полностью описанные пространственные положения передающей и приемной антенн относительно друг друга также могут быть использованы в качестве входных данных для процесса обращения для более точного согласования измеренных ответных сигналов моделируемым ответным сигналам по сравнению с процессами обращения, в которых не учитываются такие положения. В этих относительных пространственных положениях учтены смещения вдоль плоскости x-y, а также вдоль оси Z. Такие смещения могут представлять собой существенные факторы в пластах с анизотропными областями, которые могут влиять на распространение сигнала сквозь пласт. На фиг. 2С показан пример, в котором использованы Декартовы координаты для определения положения антенны нижнего модуля приспособления для КВБ относительно системы координат с центром в точке расположения верхней антенны модуля приспособления для КВБ. Координату zp нижней антенны проецируют на ось Z верхней антенны, и координаты xp и yp сначала проецируют на плоскость x-y, и затем по отдельности на каждую соответствующую ось. Координирование таким образом полностью описывает относительные положения указанных двух антенн в пласте. Следует отметить, что относительные пространственные положения также могут быть полностью описаны с использованием полярных координат, т.е. расстоянием d' вместе с относительным наклоном модуля приспособления для КВБ и азимутальными углами. Таким образом, калиброванное расстояние d' может быть выведено из относительных пространственных положений.
На фиг. 3 показана блок-схема электронных средств для вышеописанных модулей (202 и 206) приспособления для КВБ и связанная с ними расположенная на поверхности система 50, которые вместе образуют иллюстративную систему 300 для КВБ. Расположенная на поверхности система 50 является подходящей для сбора, обработки и отображения каротажных данных посредством отображающего устройства 56 и по меньшей мере согласно некоторым вариантам реализации генерирует геонавигационные сигналы на основании данных каротажных измерений и отображает их для пользователя. Пользователь может дополнительно взаимодействовать с системой посредством клавиатуры 54 и указательного устройства 55 (например, мыши) для передачи команд модулям 202 и 206 приспособления для КВБ для поворота буровой колонны в ответ на принятые данные. При необходимости расположенная на поверхности система 50 может быть запрограммирована для автоматической передачи таких команд в ответ на данные каротажных измерений, и, таким образом, расположенная на поверхности система 50 может автоматически управлять процессом бурения.
Система 50 содержит интерфейс 352 отображающего устройства, телеметрический приемопередатчик 354, процессор 356, периферийный интерфейс 358, информационное накопительное устройство 360, сетевой интерфейс 362 и запоминающее устройство 370. Шина 364 связывает каждый из этих элементов друг с другом и передает их сигналы. Телеметрический приемопередатчик 354 обеспечивает связь расположенной на поверхности системы 50 с модулями приспособления для КВБ (прямо или косвенно), и сетевой интерфейс 362 обеспечивает связь с другими системами (например, с центральным оборудованием для обработки данных посредством сети Интернет). В соответствии с вводом пользователя, принятым посредством периферийного интерфейса 358, и программными командами из запоминающего устройства 370 и/или информационного накопительного устройства 360 процессор 356 обрабатывает телеметрическую информацию, принятую телеметрическим приемопередатчиком 354, для построения диаграмм свойств пласта в соответствии с описанными способами и/или геонавигационными сигналами и отображения их для пользователя.
Расположенная на поверхности система 50 связана с модулем 202 приспособления для КВБ, который принимает управляющие сообщения от расположенной на поверхности системы 50 и передает системе 50 каротажные данные посредством телеметрических приемопередатчиков 302. Контроллер и запоминающее устройство 304 связаны с телеметрическим приемопередатчиком 302, источником 306 питания, накопительным устройством 308, одним или большим количеством устройств 310 для измерения положения, телеметрическим приемопередатчиком 312 ближней связи и одним или большим количеством приемных и/или передающих антенн 314, координируя таким образом работу различных компонентов. Согласно некоторым иллюстративным вариантам реализации передающая/приемная антенна (или антенны) 314, принимает электромагнитные сигналы 322, переданные модулем 206 приспособления для КВБ, которые используются для измерения электрических характеристик окружающей породы. Согласно другим вариантам реализации контроллер и запоминающее устройство 304 вызывают передачу посредством передающей/приемной антенны (или антенн) 314 электромагнитных сигналов 324, которые принимаются и измеряются модулем 206 приспособления для КВБ. Результаты измерений передаются в форме радиосигналов 326 из модуля 206 приспособления для КВБ в модуль 302 приспособления для КВБ посредством телеметрического приемопередатчика 312 ближней связи. Положение (или положения) антенны 314 может быть определено посредством устройства (или устройств) 310 для измерения положения, и информация о положении и результаты измерений направляются в контроллер и запоминающее устройство 304 для сохранения в накопительном устройстве 308, причем по меньшей мере часть этой информации передают расположенной на поверхности системе 50.
Модуль 206 приспособления для КВБ содержит источник 330 питания, контроллер и запоминающее устройство 332, устройство или устройства 334 для измерения положения, ближний телеметрический приемопередатчик 336 и передающую/приемную антенну (или антенны) 338, причем все устройства связаны друг с другом и действуют подобно соответствующим компонентам модуля 202 приспособления для КВБ. Согласно некоторым вариантам реализации модуль 206 приспособления для КВБ передает электромагнитные сигналы 322 для измерения модулем 202 каротажного приспособления, в то время как модуль 206, размещенный в других приспособлениях для КВБ, принимает электромагнитные сигналы 324, переданные модулем 202 каротажного приспособления. Модули 202 и 206 приспособления для КВБ обмениваются информацией посредством приемопередатчиков 312 и 336 для ближней телеметрической связи, причем указанная информация может включать результаты измерений электромагнитных сигналов, синхронизирующие сигналы передачи/приема, а также конфигурирующие и управляющие команды. Эта информация может исходить от любого компонента системы, включая помимо прочего контроллер и запоминающее устройство 304 и 332 и расположенную на поверхности систему 50. Источники 306 и 330 питания, используемые для питания компонентов скважинных модулей 202 и 206 приспособления для КВБ, могут включить батареи, преобразователи вибраций в электроэнергию, турбины, электрические генераторы или любой другой подходящий механизм. Передающая/приемная антенны 314 и 338 могут включать любую из различных антенн, включая помимо прочего азимутально чувствительные антенны, такие как наклонные петлевые антенны. В телеметрических приемопередатчиках 312 и 336 ближней связи может быть использован любой подходящий способ ближней скважинной связи. Кроме того, в каждый модуль приспособления для КВБ также могут быть включены дополнительные датчики (не показаны) температуры, давления, смазки, вибрации, напряжения и плотности для отслеживания условий бурения.
Процессор 356 расположенной на поверхности системы, а также контроллеры и запоминающие устройства в модулях 304 и 332 приспособления для КВБ в целом действуют в соответствии с одной или большим количеством программ, сохраненных в информационном накопительном устройстве (например, информационном накопительном устройстве 360). Исполнение этих программ посредством контроллера и/или обрабатывающей системы вызывает осуществление по меньшей мере части описанных в настоящей заявке способов. В целях ясности, в приведенном ниже описании способа предполагается, что каждый из программных модулей, выполняющих описанные функции, полностью расположен внутри запоминающего устройства 370 и исполняется процессором 356 расположенной на поверхности системы 50 (как показано на фиг. 3). Тем не менее, предполагается, что одна или большее количество указанных функций могут быть осуществлены программными модулями, которые являются резидентными в запоминающем устройстве одного из модулей 202 приспособления для КВБ, модуля 206 приспособления для КВБ и/или каротажного приспособления 310 и исполняются соответствующим внутрискважинным процессором и/или контроллером. Кроме того, несмотря на то что ниже описана система с одной наклонной передающей антенной в модуле 206 приспособления для КВБ и одной наклонной приемной антенной в модуле 202 приспособления для КВБ, работающими на одной частоте, следует понимать, что любое число передающих и/или приемных антенн, работающих на одной или большем количестве частот могут быть использованы в каждом модуле приспособления для КВБ, и что описанные способы могут быть реализованы с использованием систем, содержащих три и большее количество модулей приспособления для КВБ.
Перед описанием иллюстративного способа, показанного на фиг. 5, необходимо внести ясность в отношении некоторого дополнительного контекста. На фиг. 4 показан пример того, как буровая скважина может быть разделена на азимутальные интервалы (т.е. диапазоны углов вращения). Как показано на фиг. 4, окружность разделена на восемь интервалов под номерами 402, 404, …, 416. Разумеется, может быть использовано большее или меньшее количество интервалов. Угол вращения измеряют от высокой стороны буровой скважины (за исключением вертикальных буровых скважин, в которых угол вращения измеряют относительно северной стороны буровой скважины). Поскольку вращающийся инструмент выполняет азимутально чувствительные измерения, результаты указанных измерений могут быть связаны с одним из этих интервалов и значением глубины. Обычно приспособления для КВБ вращаются намного быстрее их продвижения вдоль буровой скважины, так что каждый интервал на данной глубине может быть связан с большим количеством измерений. В пределах каждого интервала на данной глубине результаты этих измерений могут быть комбинированы (например, усреднены) для повышения их надежности.
В иллюстративном способе и системе, показанным на фиг. 3 и 5 соответственно, количество азимутальных интервалов определяют (на этапе 502 на фиг. 5 путем исполнения группирующего программного модуля 372 на фиг. 3) на основании количества наклонных модулей приспособления для КВБ, количества частот сигналов, распространенных передающей антенной (или антеннами) сквозь пласт, и количества передающих и приемных антенн. В целом, для большего количества наклонных модулей приспособления для КВБ (т.е. при повышенной сложности трассы ствола скважины) требуется увеличенное количество интервалов, необходимое для обращения матрицы для определения пластовой модели. При увеличенном количестве частот и антенн могут быть использованы уменьшенные количества интервалов. Таким образом, например, для системы, работающей на одиночной частоте и имеющей одиночный отклоняющий переводник с одним передатчиком и одним приемником, может потребоваться только четыре азимутальных измерения, в то время как для системы, работающей на одиночной частоте, с одним передатчиком и двумя приемниками или двумя передатчиками и одним приемником может потребоваться только два азимутальных измерения.
После определения количества интервалов запускают передачу электромагнитных сигналов (например, сигналов 322 посредством передающей антенны 338 в модуле 206 приспособления для КВБ путем исполнения передающего программного модуля 374 на этапе 504), в результате чего сигналы распространяются сквозь окружающую породу к приемной антенне (например, приемной антенне 314 в модуле 202 приспособления для КВБ), причем принятый указанной антенной сигнал измеряют в каждом азимутальном интервале и дополнительно обрабатывают для получения результатов измерений (на этапе 504 путем исполнения приемного программного модуля 376). По меньшей мере согласно некоторым иллюстративным вариантам реализации в результате могут быть получены измеренные параметры глубокозалегающего пласта (например, удельное сопротивление, напряжение, ток, и т.п.). Одновременно собирают данные у измеряющих положение устройств 310 и 334 для каждого измерения, используемые для выведения данных о положении и ориентации антенн (на этапе 506 путем исполнения определяющего положение программного модуля 378).
Извлеченные данные о положении и ориентации могут быть использованы для вычисления передающего и приемного векторов и Rvector(t0) уравнений (1) и (2), а также соответствующих относительных пространственных положений передающих и приемных антенн (на этапе 508 путем исполнения калибровочного программного модуля 382). Как указано выше, измерения, соответствующие одному и тому же показателю (т.е. тому же самому положению буровой скважины и азимутальному интервалу), могут быть агрегированы, и результирующие агрегированные данные могут быть использованы в вышеописанных вычислениях. Затем результаты измерений, пространственные положения, а также передающую и приемную матрицы индексируют по положению антенны вдоль буровой скважины и азимутальному интервалу и сохраняют в накопительном устройстве (на этапе 510 путем исполнения программного модуля 380, сохраняющего данные в запоминающем устройстве), таком как информационное накопительное устройство 360.
Сохраненные индексированные данные впоследствии могут быть использованы в качестве входных данных для процесса обращения матрицы, который начинают с выбора исходных параметров модели пласта (на этапе 512 путем исполнения программного модуля 384 обращения матрицы). Такие параметры могут включать помимо прочего регулируемое расчетное сопротивление пласта, анизотропию, глубину и границы пласта. Связывающий матрицы компонент Vmatrix(t0) из уравнений (1) и (2) вычисляют на основании выбранных параметров для модели 386 пласта и комбинируют с передающими и приемными векторами и относительными пространственными положениями для выработки калиброванного смоделированного ответного сигнала (на этапе 514 путем исполнения калибрующего программного модуля 382). Калиброванный смоделированный ответный сигнал сравнивают с измеренным ответным сигналом (на этапе 516 путем исполнения программного модуля 382) для определения соответствия ответным сигналам. Такое "соответствие" не обязательно должно быть точным, но вместо этого может быть основано на критерии приемлемости, таком, например, как критерий наименьших квадратов, вычисленный для набора значений вдоль полной окружности инструмента и для конкретного диапазона глубин. Другие критерии приемлемости, подходящие для использования с описанными способами и системами, являются очевидными для специалистов, и все такие критерии находятся в пределах объема защиты настоящего изобретения.
Если определено (на этапе 518 путем исполнения программного модуля 382), что различия между калиброванной моделью и измеренными ответными сигналами находятся за пределами критериев приемлемости, выбирают (на этапе 520 путем исполнения программного модуля 382) другие параметры модели пласта и этапы 514-518 повторяют путем исполнения программного модуля 382. После достижения соответствия модель пласта с параметрами, обеспечивающими соответствие, может быть представлена пользователю (на этапе 522 путем исполнения программного модуля 382), например, на экране отображающего устройства, указывающего состав пласта. Если определено, что бурение продолжается (на этапе 524 путем исполнения программного модуля 382), процесс обращения матрицы продолжают с использованием указанного программного модуля. Если определено несоответствие между смоделированным и измеренным ответными сигналами, параметры модели снова изменяют и процесс повторяют, пока не будет достигнуто соответствие (на этапах 514-518). Процесс обращения матрицы, реализованный на этапах 514-524, продолжают до прекращения бурения (на этапе 524), после чего способ завершают (на этапе 526).
В вышеописанном процессе обращения матрицы в качестве входного сигнала используют относительные пространственные положения принимающих и передающих антенн. Такое определение указанных относительных пространственных положений зависит от точного определения положений передающей и приемной антенн, которые могут включать местоположения антенн (например, широту, долготу и глубину, относительное расстояние до эталонной точки и т.п.) и/или ориентации (например, направление по компасу, угол относительно вертикальной или горизонтальной плоскости, направление к эталонной точке и т.п.). В вышеописанных вариантах реализации эти положения определяют по меньшей мере частично посредством устройств 222а и 222b для измерения положения, показанных на фиг. 2А. Каждое такое устройство для измерения положения может содержать одно или большее количество устройств, включая помимо прочего магнитометры, кренометры, акселерометры и гироскопы. По меньшей мере в некоторых иллюстративных вариантах реализации эти устройства работают вместе для отслеживания своего перемещения относительно известной эталонной точки в верхней части буровой скважины по мере того, как устройства для измерения положения продвигаются вдоль скважины.
Согласно некоторым иллюстративным вариантам реализации, таким как показанные на фиг. 6, одно или большее количество устройств 622 для измерения положения передают один или большее количество сигналов на очень низких частотах (например, электромагнитные, сейсмические или акустические сигналы на частоте 1 Гц) расположенному на поверхности приемнику/передатчику 602 или принимают сигнал от приемника/передатчика 602. Согласно одному варианту реализации, показанному в левой части чертежа на фиг. 6, каждое устройство 622 для измерения положения в модулях 604, 606 и 608 приспособления для КВБ связывается с расположенной на поверхности станцией 602 для определения направления к каждому устройству для измерения положения или к расположенной на поверхности станции (например, с использованием фазированной антенной решетки) и расстояния между каждым устройством для измерения положения и расположенной на поверхности станцией (например, путем вычисления задержек при распространении сигнала).
Для ясности предыдущие варианты реализации были описаны как оснащенные устройствами для измерения положения, совмещенными с каждой антенной, и каждое устройство определяет свое собственное положение относительно наружной системы координат (например, географическое положение, положение относительно поверхности и т.п.). Практически, это положение отражает пространственные отношения антенн, которые необходимы в данном случае, и потому может быть использована любая инструментальная конфигурация, которая позволяет получить такие отношения. Например, по меньшей мере согласно некоторым иллюстративным вариантам реализации может быть использовано одиночное устройство для измерения положения, которое определяет пространственное положение каждой антенны относительно ее собственного местоположения путем приема низкочастотных сигналов от передатчиков (таких как описанные выше) и каждое из которых совмещено с антенной. Такое устройство для измерения положения может быть совмещено с одной из антенн или не совмещено ни с одной из антенн. Информация, необходимая для определения положения каждого передатчика и, таким образом, соответствующая антенне (или антеннам) (например, расстояние и угол относительно указанного устройства для измерения положения), может быть получена из характеристик сигналов, принятых и/или обработанных устройством для измерения положения (например, задержки распространения, фазы, амплитуды, направления и т.п.).
Изображенный в центре на фиг. 6 вариант реализации показывает пример приспособления для КВБ, который определяет относительные положения по меньшей мере некоторых из антенн в приспособлении. В этом примере каждый из низкочастотного передатчика 624 в модуле 608 для КВБ и низкочастотного приемопередатчика 623 в модуле 606 для КВБ совмещены с антенной (не показана). Передатчик 624 передает сигнал приемопередатчику 623, который определяет относительное положение и ориентацию передатчика 624 и соответствующей ему антенны. Эта информация может быть направлена к устройству 622 для измерения положения для дополнительной обработки (например, с использованием коммуникационного канала ближней связи, как описано выше). Приемопередатчик 623 также передает сигнал, принимаемый устройством 622 для измерения положения, которое затем может определить положение приемопередатчика 623 относительно устройства 622 для измерения положения на основании принятого сигнала. В показанном справа на чертеже на фиг. 6 варианте реализации передатчики 624 в каждом из модулей 606 и 608 приспособления для КВБ передают сигнал, принимаемый устройством 622 в модуле 604 приспособления для КВБ, который определяет относительное направление и расстояние для каждого передатчика. Согласно вариантам реализации, в которых вычисляют относительное направление и расстояние, устройство 622 в модуле 604 приспособления для КВБ определяет абсолютное эталонное положение с использованием любого из описанных способов для формирования базы для определения положения антенн в модулях приспособления для КВБ, расположенных вдоль скважины. Множество других комбинаций абсолютных и относительных вычислений положения на основании измерений с использованием любой из множества конфигураций устройств для измерения положения являются очевидными для специалистов, и все такие вычисления и конфигурации находятся в пределах объема защиты настоящего изобретения.
Как показано на фиг. 6, использование измеряющих положение устройств для каждого из различных модулей приспособления для КВБ позволяет определить положение каждой антенны в каждом модуле для его отслеживания даже при сложном расположении модуля, в результате чего может быть обеспечено более точное определение расстояния между передающей и приемной антеннами по сравнению с системами и способами, в которых предполагается фиксированное расстояние. Такой подход может быть подходящим для использования с буровыми скважинами, имеющими один или большее количество резких изгибов, в которых направление бурения изменяется несколько раз в нескольких различных направлениях. Описанные системы и способы учитывают эти изменения и, таким образом, позволяют выполнить точные вычисления расстояний между передающими и приемными антеннами вдоль буровой колонны с одновременным пересечением сложных трасс ствола скважины, в результате чего возможна более точная оценка глубокозалегающего пласта окружающей породы по сравнению с системой, в которой расстояния между антеннами считаются фиксированными.
Множество других модификаций, эквивалентов и альтернатив будут очевидными для специалистов после ознакомления с описанным выше настоящим изобретением. Например, несмотря на то что на фиг. 2А показан "наддолотный" модуль приспособления для КВБ, отделенный от каротажного приспособления отклоняющим переводником, согласно другому варианту реализации или в дополнение к описанным может быть использовано любое количество других отдельных модулей приспособления для КВБ, расположенных вдоль буровой колонны, а не только вплотную к буровой коронке. Кроме того, несмотря на то что показанные на чертеже варианты реализации изображены и описаны в контексте индукционных и электромагнитных каротажных приспособлений для измерения удельного сопротивления, согласно другим вариантам реализации или в дополнение к описанным могут быть использованы другие инструменты для каротажа и измерений (например, гальванические каротажные приспособления для измерения удельного сопротивления). Кроме того, несмотря на то что вращательная часть описанной калибровки выполняется путем вращения моделируемого ответного сигнала для сравнения с измеренным ответным сигналом, вместо этого калибровка также может быть осуществлена путем вращения измеренного ответного сигнала перед этапом сравнивания. Таким образом, понятно, что пункты приложенной формулы следует интерпретировать как охватывающие все такие модификации, эквиваленты и альтернативы, где это уместно.
Изобретение относится к средствам для каротажа во время бурения скважин. Техническим результатом является улучшение качества сигнала, передающего информацию. В частности, предложено приспособление для каротажа во время бурения (КВБ) с множеством модулей, расположенных вдоль буровой колонны, содержащее: первый модуль из множества модулей приспособления для КВБ, содержащий передающую антенну; второй модуль из множества модулей приспособления для КВБ, содержащий приемную антенну; и по меньшей мере одно устройство для измерения положения, которое по меньшей мере частично определяет пространственные положения передающей и приемной антенн относительно друг друга. Причем модель пласта согласована с окружающей породой по меньшей мере частично на основании указанных относительных пространственных положений. 3 н. и 20 з.п. ф-лы, 8 ил.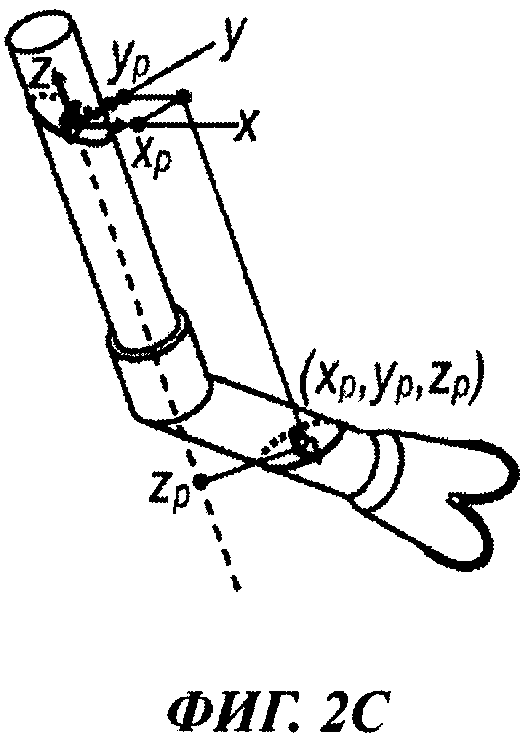
1. Приспособление для каротажа во время бурения (КВБ) с множеством модулей, расположенных вдоль буровой колонны, содержащее:
первый модуль из множества модулей приспособления для КВБ, содержащий передающую антенну;
второй модуль из множества модулей приспособления для КВБ, содержащий приемную антенну; и
по меньшей мере одно устройство для измерения положения, которое по меньшей мере частично определяет пространственные положения передающей и приемной антенн относительно друг друга;
причем модель пласта согласована с окружающей породой по меньшей мере частично на основании указанных относительных пространственных положений.
2. Приспособление по п. 1, в котором модель пласта содержит модель сопротивления пласта.
3. Приспособление по п. 1, в котором модули приспособления для КВБ указанного множества являются частью приспособления для КВБ, выполняющей измерения удельного сопротивления глубокозалегающего пласта.
4. Приспособление по п. 1, в котором калиброванное расстояние между приемной антенной и передающей антенной определено путем регулировки исходного расстояния между приемной антенной и передающей антенной по меньшей мере частично на основании относительных пространственных положений.
5. Приспособление по п. 1, в котором по меньшей мере один из множества модулей приспособления для КВБ принимает сигнал приемной антенны, представляющий измеренный ответ на сигнал передающей антенны, распространенный сквозь окружающую породу, и
в котором модель пласта дополнительно согласована с окружающей породой путем сравнивания измеренного ответа с моделированным ответом, который настроен на основании азимутального угла и угла поворота приемной и передающей антенн и на основании углов наклона модуля приспособления для КВБ.
6. Приспособление по п. 5, в котором один или большее количество параметров согласованной модели пласта идентифицированы путем обращения матрицы, при котором в качестве входных сигналов использован по меньшей мере указанный настроенный ответный сигнал и указанные относительные пространственные положения.
7. Приспособление по п. 1, в котором первое из относительных пространственных положений определено относительно расположенного на поверхности эталонного положения.
8. Система для каротажных скважинных измерений во время бурения (КВБ), содержащая:
расположенную на поверхности вычислительную систему; и
множество модулей приспособления для КВБ, расположенных вдоль буровой колонны и связанных с вычислительной системой, которые содержат:
первый модуль приспособления для КВБ, содержащий передающую антенну;
второй модуль приспособления для КВБ, содержащий приемную антенну; и
по меньшей мере одно устройство для измерения положения, которое по меньшей мере частично определяет пространственные положения передающей и приемной антенн относительно друг друга;
причем модель пласта согласована с окружающей породой по меньшей мере частично на основании указанных относительных пространственных положений.
9. Система для КВБ по п. 8, в которой модель пласта содержит модель сопротивления пласта.
10. Система КВБ по п. 8, в которой модули приспособления для КВБ указанного множества являются частью приспособления для КВБ, выполняющей измерения удельного сопротивления глубокозалегающего пласта.
11. Система для КВБ по п. 8, в которой калиброванное расстояние между приемной антенной и передающей антенной определено путем регулировки исходного расстояния между приемной антенной и передающей антенной по меньшей мере частично на основании относительных пространственных положений.
12. Система для КВБ по п. 8, в которой относительные пространственные положения по меньшей мере частично определены посредством низкочастотного сигнала, переданного по меньшей мере между одним из множества модулей приспособления для КВБ и расположенной на поверхности станцией.
13. Система для КВБ по п. 12, в которой относительные пространственные положения определены по меньшей мере частично путем измерения задержки распространения низкочастотного сигнала или направления на источник низкочастотного сигнала.
14. Система для КВБ по п. 12, в которой низкочастотный сигнал содержит сигнал, выбранный из группы, состоящей из акустического сигнала, сейсмического сигнала и электромагнитного сигнала.
15. Система для КВБ по п. 8, в которой первое из относительных пространственных положений определено относительно расположенного на поверхности эталонного положения.
16. Система для КВБ по п. 8, в которой по меньшей мере один из множества модулей приспособления для КВБ принимает сигнал приемной антенны, представляющий измеренный ответ на сигнал передающей антенны, распространенный сквозь окружающую породу, и
причем модель пласта дополнительно согласована с окружающей породой путем сравнивания измеренного ответа с моделированным ответом, который настроен на основании азимутального угла и угла поворота приемной и передающей антенн и на основании углов наклона модуля приспособления для КВБ.
17. Система для КВБ по п. 16, в которой один или большее количество параметров согласованной модели пласта идентифицированы путем обращения матрицы, при котором в качестве входных сигналов использован по меньшей мере указанный настроенный ответный сигнал и указанные относительные пространственные положения.
18. Система КВБ по п. 17, в которой обращение матрицы выполняется расположенной на поверхности компьютерной системой.
19. Способ определения одной или большего количества моделей пласта, включающий этапы, согласно которым:
активируют передатчик в первом модуле приспособления для КВБ из множества модулей приспособления для КВБ, расположенных вдоль буровой колонны, и вызывают распространение сигнала от передающей антенны в первом модуле приспособления для КВБ сквозь окружающую породу,
принимают распространенный сигнал посредством приемной антенны во втором модуле приспособления для КВБ из множества модулей приспособления для КВБ,
определяют относительные пространственные положения передающей и приемной антенн по меньшей мере частично на основании данных, предоставленных одним или большим количеством устройств для измерения положения, совмещенных по меньшей мере с одной из передающей и приемной антенн,
согласуют модель пласта с окружающей породой по меньшей мере частично на основании указанных относительных пространственных положений и предоставляют согласованную модель пласта пользователю.
20. Способ по п. 19, согласно которому модель пласта содержит модель сопротивления пласта.
21. Способ по п. 19, дополнительно включающий получение результатов измерения удельного сопротивления глубокозалегающего пласта окружающей породы по меньшей мере частично путем активизации передатчика и приема распространенного сигнала.
22. Способ по п. 19, дополнительно включающий определение калиброванного расстояния между приемной антенной и передающей антенной путем регулирования исходного расстояния между приемной антенной и передающей антенной по меньшей мере частично на основании относительных пространственных положений.
23. Способ по п. 19, дополнительно включающий этапы, согласно которым:
регулируют моделируемый ответный сигнал на основании азимутального угла и угла поворота приемной и передающей антенн и на основании углов наклона модуля приспособления для КВБ, соответствующих каждой антенне; и
согласуют модель пласта с окружающей породой путем дополнительного сравнивания регулируемого моделируемого ответного сигнала с ответным сигналом, представляющим принятый распространенный сигнал.
| US 20120068712 A1, 22.03.2012 | |||
| US 20110051552 A1, 03.03.2011 | |||
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ ИЗОТРОПНОГО И АНИЗОТРОПНОГО ПЛАСТА ПРИ НАЛИЧИИ ПРОНИКНОВЕНИЯ | 2004 |
|
RU2380727C2 |
| ИНДУКТИВНЫЕ ИЗМЕРЕНИЯ ПРИ УМЕНЬШЕННЫХ ВЛИЯНИЯХ СКВАЖИНЫ | 2004 |
|
RU2344446C2 |
| US 7588082 B2, 15.09.2009 | |||
| US 20120313790 A1, 13.12.2012. | |||

