Изобретение относится к гироскопам, а именно к поворотно-чувствительным устройствам с колеблющимися массами, и может быть использовано для измерения углов в системах навигации и управления.
Наиболее близким к изобретению устройством является твердотельный волновой гироскоп, описанный в патенте США №3924475, кл. G01Р 9/04, 1975 г., содержащий полусферический резонатор, основание, поддерживающее резонатор вдоль оси симметрии, проходящей через полюс полусферы, на котором выполнены приемные электроды, блок управления, к которому подсоединены приемные электроды и к выходам которого подключены блок параметрического возбуждения, блоки позиционного возбуждения и вычислитель, при этом выходы блоков параметрического и позиционного возбуждения подсоединены к блоку управления дискретными электродами.
Недостатком такого твердотельного волнового гироскопа является появление динамических погрешностей измерения угла, обусловленных смещением вибрационной картины силами Кориолиса, возникающими при принудительном вращении резонатора.
Задачей изобретения является устранение недостатка прототипа с повышением разрешающей способности при измерении углов поворота основания гироскопа.
Технический результат изобретения достигается тем, что твердотельный волновой гироскоп, содержащий полусферический резонатор, основание, поддерживающее резонатор вдоль оси симметрии, проходящей через полюс полусферы, на котором выполнены приемные электроды, блок управления, к которому подсоединены приемные электроды и к выходам которого подключены блок параметрического возбуждения, блоки позиционного возбуждения и вычислитель, причем выходы блоков параметрического и позиционного возбуждения подсоединены к блоку управления дискретными электродами, дополнительно снабжен оптико-электронной системой измерения приращения угла поворота узлов вибрационных колебаний, которая содержит источник излучения, модулятор излучения и фотоприемник, подключенный к входу формирования импульсов, выход которого подключен к реверсивному счетчику, и системой слежения за движением узлов вибрационных колебаний, которая содержит четыре дополнительных приемных электрода, подключенных к входу суммирующего усилителя, к выходу которого подсоединен электромеханизм, установленный в основании и на подвижной части которого размещены модулятор излучения и четыре выступа, на которых размещены дополнительные электроды.
На фиг.1 представлена конструкция твердотельного волнового гироскопа; на фиг.2 - то же, электрическая схема соединения элементов датчика.
Твердотельный волновой гироскоп (фиг.1) содержит полусферический резонатор 1 со стержнем 2, изготовленный из плавленого кварца. Полусфера металлизирована слоем 3 электропроводящего материала. Основание 4 поддерживает резонатор 1 вдоль оси симметрии, проходящей через полюс полусферы. Электрический контакт с металлизированной поверхностью резонатора 1 осуществляется через металлизированные поверхности 5 основания 4 и стержня 2. Гироскоп имеет полусферическую оболочку 6 из диэлектрического материала, окружающую с зазором (≈0,1 мм) резонатор 1. На основании 4 выполнены приемные элементы, например электроды 7-14, на определенном расстоянии от нижнего обреза полусферы вдоль осей, разнесенных, например, на угол 45°. Электрический контакт с приемными элементами осуществляется через герметичные токовводы 15 и 16. На внутренней поверхности оболочки 6 с полярной осью 17 сформированы, например, напылением поля 18 дискретных электродов. Форма каждого из электродов 19-34 - параллелограмм. Электрический контакт с дискретными электродами осуществляется через герметичный токоввод 35. В основание 4 встроено приспособление 36, на котором размещен электромеханизм 37, подвижная часть 38 которого содержит модулятор излучения 39 в виде кольца, выполненного из прозрачного материала с нанесенной на него растровой картинкой, и четыре выступа 40-43. На выступах 40-43 размещены четыре дополнительных приемных электрода 44-47. На подвижной части 48 электромеханизма размещен источник излучения 49, например светодиод. Напротив источника излучения с противоположной стороны модулятора излучения 39 на оболочке 6 размещен фотоприемник 50, электрический контакт с которым осуществляется через гермовывод 35. Электрические контакты с электродами 44-47, обмотками электромеханизма 37 и источником излучения 49 осуществляются через герметичные выводы 51 и 52. Сборка из резонатора 1, оболочки 6, основания 4, приспособления 36 и электромеханизма 37 помещается в герметизируемый корпус 53.
Приемные электроды 7-14 подсоединены к блоку 54 управления колебаниями. Блок 54 управления колебаниями, например, содержит предусилители, схемы первоначального возбуждения, стабилизации амплитуды, автоподстройки частоты, управления фазой колебаний резонатора.
Блок 54 управления колебаниями имеет три выхода. К первому выходу блока 54 управления колебаниями подключен блок 55 параметрического возбуждения. Таким образом, первый выход блока 54 обеспечивает параметрическое поддержание вибрационных колебаний резонатора, остальные выходы блока 54 управления колебаниями служат для обеспечения фазового контроля колебаний резонатора и подсоединены к блокам 56-60 позиционного возбуждения, а также для вычисления и подсоединены к вычислителю 61.
Блоки 56-60 представляют собой регулируемые источники постоянного тока. Выходы блоков 55-56 подсоединены к блоку 62, представляющему собой схему управления дискретными электродами 19-34, известную в литературе [1]. Дополнительные приемные электроды 44-47 подключены на вход суммирующего усилителя 63, к выходу которого подсоединен электромеханизм 37, механически связанный с дополнительными приемными электродами 44-47 и модулятором излучения 39. Источник излучения 49 подключен к источнику питающего напряжения и через модулятор излучения 39 оптически связан с фотоприемником 50, подключенным на вход формирователя импульсов 64, выход которого подсоединен к входу реверсного счетчика 65.
Для определения ориентации рисунка вибрационных колебаний первоначальное возбуждение колебаний резонатора осуществляется позиционным способом с помощью двух дискретных электродов, например 19 и 27. После достижения требуемой амплитуды колебаний резонатора схема первоначального позиционного возбуждения блока 54 отключается и поддержание колебаний осуществляется параметрически с помощью дискретных электродов 19-34, что обеспечивает стационарные вибрационные колебания резонатора с произвольно ориентированными (не связанными с основанием) главными осями. Собственные вибрационные колебания полусферического резонатора частотой ω имеют четыре узла и четыре пучности. При повороте полусферы резонатора 1 на угол φ (совместно с основанием) рисунок вибрационных колебаний из-за влияния сил Кориолиса поворачивается на угол φ1=k1φ относительно неподвижной системы координат. Регистрация положения рисунка вибрационных колебаний дает информацию об угле φ поворота полусферы и позволяет использовать полусферу в качестве датчика, определяющего угловое перемещение прибора и изделия относительно неподвижной системы координат. Угол θ поворота рисунка вибрационных колебаний относительно полусферы (и электродов 7-14) вычисляется в вычислителе 61 из сигналов напряжения вида
U7=U0sin2θsinωt;
U9=U0cos2θsinωt,
воспринимаемых приемными электродами 7-14, например, по формуле
θ=1/2 arctg U7/U9, тогда φ=k2θ,
где k2 - масштабный коэффициент ТВГ.
Разрешающая способность определения угла θ ограничена чувствительностью электронной схемы к изменению уровней напряжения U7 и U9 за счет изменения амплитуд колебаний резонатора в местах установки приемных электродов 7, 9. Поэтому наряду с измерением угла измеряется и его приращение Δθ. Измерение приращения угла осуществляется следующим образом. С помощью следящей системы, содержащей четыре дополнительных приемных электрода 44-47, усилитель 63 и электромеханизм 37 путем установки приемных электродов 44-47 в положение, в котором суммарный сигнал с них минимален, отслеживается движение узлов вибрационных колебаний. Слежение за движением узлов вибрационных колебаний сопровождается поворотом модулятора излучения 39 оптико-электронной системы. При этом излучаемый поток света источником излучения 49 модулируется и с помощью фотоприемника 50 и формирователя импульсов 64 преобразуется в последовательность импульсов, число которых, подсчитываемое реверсным счетчиком, пропорционально приращению угла Δθ за время подсчета. Разрешающая способность измерения приращения угла определяется линейным периодом растровой картинки h и определяется формулой [2] Δθ=h/2R,
где R - радиус кольцевого модулятора.
При этом при h=5*10-6 м, R=3*10-2 м, Δθ=2 угл. сек.
Таким образом, применение заявляемого изобретения позволит повысить разрешающую способность и точность измерения угла поворота, что особенно важно для высокоманевренных подвижных объектов.
Источники информации
1. Патент США №3924475, кл. G01P 9/04, 1975 (прототип).
2. Преснухин Л.Н. и др. Муаровые растровые датчики положения и их применение. - М.: Машиностроение, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| МИКРОКОНТРОЛЛЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЕМКОСТИ И СОПРОТИВЛЕНИЯ В ДВОИЧНЫЙ КОД | 2013 |
|
RU2546713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2018 |
|
RU2670245C1 |
| ГЕЛИОСИСТЕМА | 2013 |
|
RU2546902C1 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
Изобретение относится к поворотно-чувствительным устройствам гироскопов и может быть использовано для измерения углов в системах навигации и управления. Более высокая чувствительность к изменению угла поворота в системе слежения за движением узлов вибрационных колебаний обеспечивается за счет размещения четырех дополнительных приемных электродов (44-47) и источника излучения (49), например светодиода, в оптико-электронной системе измерения приращения угла поворота узлов вибрационных колебаний на подвижной части (48) электромеханизма. Напротив источника излучения (49) с противоположной стороны модулятора излучения (39) на оболочке (6) размещен фотоприемник (50). 2 ил.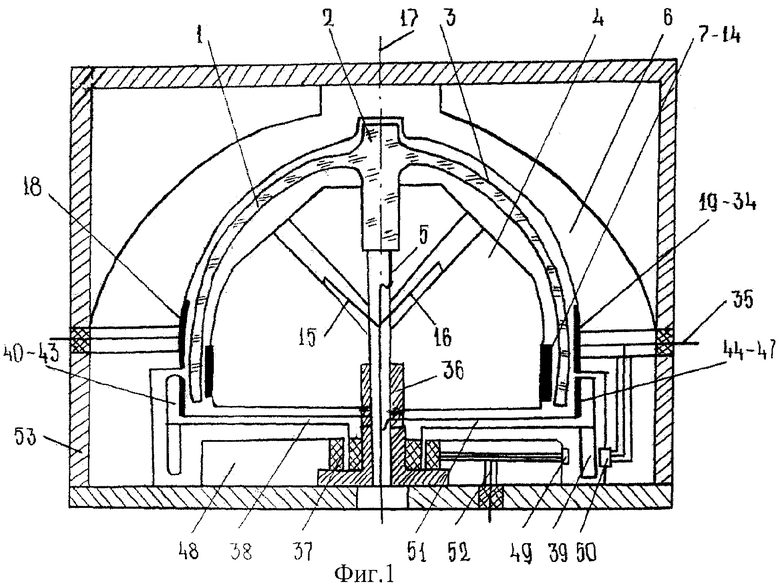
Твердотельный волновой гироскоп, содержащий корпус, полусферический резонатор, блок позиционного возбуждения, блок параметрического возбуждения, блок управления колебаниями резонатора, вычислитель и приемные электроды, присоединенные к блоку управления колебаниями и вычислителю, отличающийся тем, что гироскоп снабжен оптико-электронной системой измерения приращения угла поворота узлов вибрационных колебаний, содержащей источник излучения, модулятор излучения и фотоприемник, подключенный к входу формирователя импульсов, выход которого подсоединен к реверсивному счетчику, кроме того, гироскоп снабжен системой слежения за движением узлов вибрационных колебаний, содержащей четыре дополнительных приемных электрода, подключенных к входу суммирующего усилителя, и электромеханизм, подсоединенный к выходу суммирующего усилителя и механически связанный с дополнительными приемными электродами и модулятором излучения.
| US 3924475 А, 09.12.1975 | |||
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2196964C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| EP 0895058 A2, 03.02.1999 | |||
| EP 1722193 A3, 15.11.2006 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ЛАЗЕРНОГО ГИРОСКОПА И СИСТЕМ НА ЕГО ОСНОВЕ | 2006 |
|
RU2307325C1 |

