Изобретение относится к медицинской технике и может быть использовано в микрохирургии и гинекологии для проведения прецизионных и органосохранных операций.
Известен лазерный хирургический комплекс и способ его использования в гинекологии [1] и в оториноларингологии [2], содержащий лазерный хирургический аппарат на СО2 лазере, сканирующую систему [3], микроманипулятор с ручным управлением лучом и устройство видеонаблюдения операционного поля с угловым увеличением (кольпоскоп или хирургический микроскоп).
Основным недостатком этого комплекса является то, что выпаривание живой ткани осуществляется с помощью сканирующей системы с фиксированной фигурой сканирования луча СО2 лазера в виде круга, заполненного спиральными линиями сканирования [3]. При таком сканировании линейная скорость перемещения лазерного пятна на биоткани и плотность заполнения фигуры сканирования различны в различных точках, что приводит к неравномерности воздействия лазерного луча внутри фигуры сканирования. Дополнительная неравномерность воздействия луча CO2 лазера в данном устройстве связана с отсутствием синхронизации начала сканирования и излучения СО2 лазера. Площадное выпаривание биоткани в данном устройстве осуществляется вручную за счет дополнительного перемещения с помощью джойстика фигуры сканирования в операционном поле, что приводит к дополнительной неравномерности воздействия луча СО2 лазера на биоткань и снижению точности операции.
Кроме того, в используемом комплексе в сканирующем устройстве отклонение лазерного луча осуществляется с помощью вращающихся клиньев, имеющих различные показатели преломления для видимой области спектра (λ=0,65 мкм) и ИК-области (λ=10,6 мкм). За счет этого траектория сканирования пилотного луча (λ=0,65 мкм) и луча СО2 лазера (λ=10,6 мкм) расходятся на оперируемом участке, что также снижает точность операции.
Наиболее близким из известных к описываемому по технической сущности и взятому за прототип является лазерный хирургический комплекс для гинекологии [4], состоящий из лазерного хирургического аппарата на СО2 лазере, роботизированной системы сканирования и микроманипулятора для стыковки с кольпоскопом, в котором начало сканирования луча синхронизировано с излучением СО2 лазера, а сканирование луча СО2 лазера на биоткани осуществляется по линейному закону внутри заранее запрограммированных фигур сканирования различной формы и размеров (треугольник, круг, прямоугольник). За счет этого обеспечивается более высокая равномерность воздействия луча СО2 лазера на биоткань внутри заданной фигуры сканирования.
Однако в реальных условиях оперативного вмешательства возникает задача площадного выпаривания биоткани внутри контура произвольной формы, причем площадь выпаривания может существенно превосходить площадь сканирования внутри выбранной фигуры сканирования. В прототипе эта задача решается с помощью заполнения вручную оперируемого участка несколькими заранее выбранными фигурами сканирования. Точность операции будет зависеть от точности совмещения фигур сканирования и от точности заполнения ими оконтуренного участка. В этом случае наряду с патологическим участком биоткани будет выпариваться здоровая ткань, а площадное выпаривание будет неравномерным.
Таким образом, данный комплекс не позволяет проводить точные органосохранные операции по выпариванию живой ткани внутри контура произвольной формы.
Задача, на решение которой направлено заявляемое изобретение, заключается в снижении травматичности ткани за счет повышения точности воздействия луча СО2 лазера на ткань при его сканировании внутри контура произвольной формы.
Указанная задача решается за счет достижения технического результата, заключающегося в формировании оптимальной траектории сканирования луча СО2 лазера внутри контура произвольной формы по сигналам управления, пропорциональным координатам контура оперируемого участка.
Указанный технический результат при осуществлении изобретения достигается тем, что в лазерный хирургический комплекс, содержащий лазерный хирургический аппарат на СО2 лазере, сканирующую систему, устройство видеонаблюдения операционного поля и устройство согласования лазерных лучей с оптической осью устройства видеонаблюдения, в устройство видеонаблюдения введена цифровая видеокамера и персональный компьютер, камера согласована с оптической осью канала видеонаблюдения операционного поля, выход камеры подключен к входу персонального компьютера с программным обеспечением видеозахвата изображения пилотного луча на операционном поле, определения его траектории при ручном перемещении по контуру патологического участка биоткани и формирования траектории сканирования луча СО2 лазера внутри оконтуренного участка, выход персонального компьютера подключен к входу микропроцессорной системы управления лазерного аппарата и к входу блока управления сканирующей системы для передачи массива данных с координатами пилотного луча и луча СО2 лазера во внешнюю память контроллеров указанных блоков с целью последующей обработки и передачи сигналов управления на СО2 лазер и на исполнительный привод сканирующей системы. Сканирующая система в описываемом комплексе может быть выполнена на базе гальванического привода сканирующих во взаимно-перпендикулярных плоскостях зеркал с пропорциональным линейным управлением, что обеспечивает совпадение траектории сканирования пилотного и операционного луча и, следовательно, повышает точность операции.
Оконтуривание оперируемого участка биоткани в данном устройстве может быть выполнено за счет перемещения пятна пилотного луча по границе патологического участка биоткани с помощью ручного привода. В качестве ручного привода перемещения пятна пилотного луча по границе патологического участка может быть использован исполнительный привод сканирующей системы, который в режиме оконтуривания патологического участка биоткани управляется вручную с помощью органов управления персонального компьютера («мышь», клавиатура).
Описываемый лазерный хирургический комплекс дополнительно содержит устройство отсасывания продуктов испарения биоткани из зоны хирургического воздействия, снабженное электронным коммутатором и электронным регулятором оборотов всасывающей турбины, входы которых соединены с микропроцессорной системой управления для синхронизации работы устройства отсасывания с излучением СО2 лазера и для автоматического регулирования производительности устройства отсасывания в зависимости от установленной мощности излучения и режима излучения СО2 лазера.
Введение в состав лазерного хирургического комплекса такого устройства отсасывания продуктов испарения обеспечивает визуальный контроль воздействия хирургического лазера на биоткань, что повышает точность оперативного вмешательства и позволяет оперативно управлять процессом операции. Кроме того, автоматизация процесса управления всасывающим устройством освобождает обслуживающий персонал от рутинной работы включения и выключения этого устройства вручную, что повышает эргономичность комплекса.
Структурная схема предлагаемого лазерного хирургического комплекса приведена на рис. 1.
Устройство работает следующим образом.
Предварительно соединяют оптический выход манипулятора лазерного хирургического аппарата (ЛХА) на СО2 лазере с оптическим входом сканирующей системы, оптический выход которой подсоединяют к устройству согласования лазерных лучей с оптической осью устройства видеонаблюдения. Устройство согласования с помощью механического адаптера крепится к устройству видеонаблюдения (хирургическому микроскопу или кольпоскопу) с встроенной видеокамерой. Выход цифровой видеокамеры соединяют с видеовходом персонального компьютера (ПК), а выход ПК электрически соединяют с микропроцессорной системой управления (МПСУ) аппарата и блоком управления сканирующей системы.
Устанавливают рядом с операционным полем устройство отсасывания продуктов испарения и соединяют его электрически с микропроцессорной системой управления ЛХА.
Производят подключение ЛХА, сканирующей системы, устройства видеонаблюдения и персонального компьютера к питающей сети и подают напряжение питания на эти блоки. Проводят юстировку пилотного лазерного луча с оптической осью устройства видеонаблюдения.
Включают на ПК программный модуль видеозахвата пилотного луча на операционном поле и вручную с помощью органов управления ПК («мышь», клавиатура) перемещают пятно пилотного луча по контуру патологической биоткани. Программное обеспечение (ПО) персонального компьютера в режиме видеозахвата определяет координаты пилотного луча в поле зрения устройства видеонаблюдения и отображает его траекторию поверх изображения операционного поля.
Включают на ПК программный модуль оконтуривания оперируемого участка. В этом режиме ПО передает массив данных о координатах пилотного луча в блок управления сканирующей системы. На основании этих данных формируются сигналы управления на исполнительный привод сканирующей системы для автоматического воспроизведения траектории пилотного луча по контуру оперируемого участка.
Включают на ПК режим заполнения оконтуренного участка линиями сканирования луча СО2 лазера. В этом режиме ПО вычисляет траекторию сканирования луча СО2 лазера внутри оконтуренного участка и передает массив данных в микропроцессорную систему управления и в блок управления сканирующей системы с целью последующей обработки и формирования сигналов управления на СО2 лазер, устройство отсасывания и исполнительный привод сканирующей системы. Луч СО2 лазера, параметры которого предварительно задаются врачом на пульте управления ЛХА в зависимости от выбранной тактики операции, сканирует по вычисленной траектории, выпаривая биоткань внутри оконтуренного участка. Глубина выпаривания биоткани зависит от выбранной мощности и режима излучения СО2 лазера, выбранной плотности заполнения линиями сканирования, от количества сканов и от выбранной скорости сканирования луча. Задавая предварительно эти параметры в ЛХА и ПК, можно задавать требуемую глубину выпаривания биоткани.
Одновременно с сигналом управления на включение СО2 лазера МПСУ формирует сигнал управления на включение устройства отсасывания продуктов испарения из операционной зоны и сигнал управления на регулирование производительности устройства отсасывания в зависимости от установленных параметров излучения СО2 лазера.
Программное обеспечение, реализующее указанный алгоритм работы элементов комплекса, может быть реализован в следующей конфигурации:
1) центральный модуль, который является исполняемым файлом, использует программные продукты C++Builder и Delphi;
2) программный модуль захвата видеокамеры и формирования контура, который не требует для работы никаких дополнительных файлов и библиотек, кроме стандартных Windows;
3) программый модуль обработки и заполнения контура линиями сканирования (zapoln.dll);
4) дополнительные библиотеки (borlndmm.dll, ce3260mt.dll).
Программное обеспечение работает следующим образом. Центральный модуль (1) формирует циклограмму работы всего комплекса, формирует управляющие сигналы на МПСУ и на блок управления сканирующей системы в виде сжатого в 4 раза массива координат контура пилотного луча, создает интерфейс на экране монитора ПК. В зависимости от режима работы комплекса (ручное оконтуривание патологического участка пилотным лучом, автоматическое воспроизведение контура пилотным лучом, заполнение контура лучом СО2 лазера, центральный модуль (1) вызывает другие необходимые программные модули (2, 3) и дополнительные библиотеки (4). Полученная от программного модуля (2) траектория пилотного луча программно преобразуется в массив точек на плоскости, каждая из которых имеет две абсолютных координаты (байт X и байт Y). Каждая последующая точка траектории расположена на расстоянии не более одной дискреты от предыдущей точки. Это обеспечивает плавность перемещения луча и минимизирует колебания исполнительного привода.
Информация о траектории движения пилотного луча передается одним пакетом из ПК по последовательному асинхронному каналу обмена (UART) в микроконтроллер блока управления сканирующей системы. Координаты точек траектории передаются в сжатом виде (используя относительные координаты), что позволяет минимизировать время передачи в 4 раза. В центральном модуле для обработки видеоинформации о положении пилотного луча может быть использован режим 320×240 пикселей, а для формирования управляющего сигнала в блок управления режим 200×200 пикселей. При таком режиме может быть обеспечена точность позиционирования пилотного луча около 50 мкм, а точность воспроизведения его траектории не более 75 мкм при размере поля сканирования 15 мм × 15 мм.
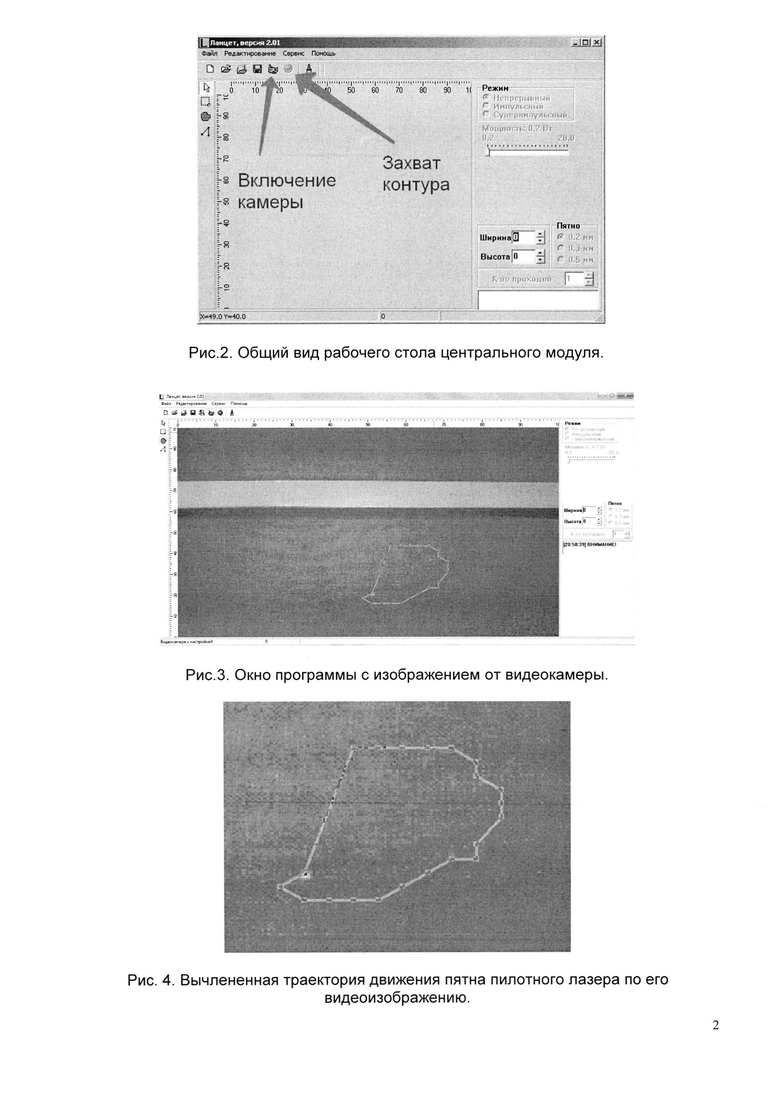
Вариант общего вида рабочего стола центрального модуля представлен на рис. 2.
Программный модуль (2) обеспечивает:
- захват изображений с любого устройства видеозахвата, поддерживаемого операционной системой Windows′ 98/ХР/7;
- сохранение захваченного видеокадра в изображении с разрешением 320×240 пикселей и отрисовку его в окне программы;
- включение (выключение) режима автоматического поиска пятна пилотного лазера;
- автоматическое формирование траектории движения пятна пилотного лазера при включенном режиме автоматического поиска;
- отображение траектории движения пятна пилотного лазера поверх видеоизображения операционного поля;
- передача координат отображенной траектории пятна пилотного лазера в центральный модуль программного обеспечения.
В окне программы отображается кадр, непосредственно полученный с устройства видеозахвата (рис. 3).
Для автоматического поиска пятна пилотного лазера выполняются следующие шаги:
1. Автобалансировка изображения в оттенках серого, что обеспечивает независимость работы алгоритма обнаружения лазерного пятна от освещенности и уровня усиления видеосигнала.
2. Фильтрация изображения: изображение разбивается на 1600 подобластей размером 8x6 пикселей и для каждой подобласти выполняется фильтрация с заданным параметром чувствительности к движению, который задается в диапазоне от 0 (без контроля движения) до 100 (максимальная чувствительность к движению). В качестве значения чувствительности к движению по умолчанию может быть принято 70.
3. Поиск изменившихся подобластей: производится сравнение отфильтрованных изображений на текущем и предыдущем шаге с выделением тех подобластей, где возникли изменения: по каждой подобласти фиксируется количество изменившихся точек (точек движения) и подсчитывается общее количество изменившихся точек для всего изображения.
4. Поиск позиции пятна пилотного лазера: при изменении числа изменившихся точек изображения порогового условия (N=8 точек) выполняется поиск подобласти с максимальным количеством изменившихся точек, т.е. где было максимальное движение. Если для подобласти максимального движения количество изменившихся точек превысило пороговое условие, то эта подобласть считается местоположением пятна пилотного лазера.
В качестве координаты пятна пилотного лазера принимается координата центра подобласти и эта точка добавляется к запоминаемой траектории движения пятна.
На рис. 4 приведена в качестве примера вычисленная по видеоизображению траектория движения пятна пилотного лазера с учетом описанного выше алгоритма.
В программном модуле (3) обработки и заполнения контура решается задача сканирования пилотного луча по вычлененной траектории движения пилотного лазера и сканирования луча СО2 лазера внутри этой траектории. Область внутри контура произвольной формы может выпариваться, например, методом строчной развертки. При этом шаг развертки строки определяется размером лазерного пятна в плоскости выпаривания и требуемой равномерностью выпаривания поверхности. Шаг перемещения вдоль строки (дискрет рабочего стола) определяется рабочей частотой исполнительного привода сканирующей системы и предельными размерами области выпаривания (размерами рабочего стола).
В данной программе задача сканирования луча СО2 лазера внутри контура решается с учетом обеспечения минимальной неравномерности выпариваемого слоя за счет регулирования плотности заполнения фигуры сканирования линиями сканирования.
Основу алгоритма программного модуля (3) составляет аналитическая геометрия на плоскости: прямые и обратные преобразования координат при поворотах и переносах системы координат, пересечение прямых, заданных в отрезках и каноническом виде. Основной процедурой программного модуля (3) является формирование дерева отсекаемых областей и выделение координат точек переходов. Отсекаемая область - это простейшая монотонно изменяющаяся по направлению сканирующей строки фигура, являющаяся частью исходной сложной фигуры, ограниченная частью или частями исходного контура и одной или двумя и более линиями сканирования.
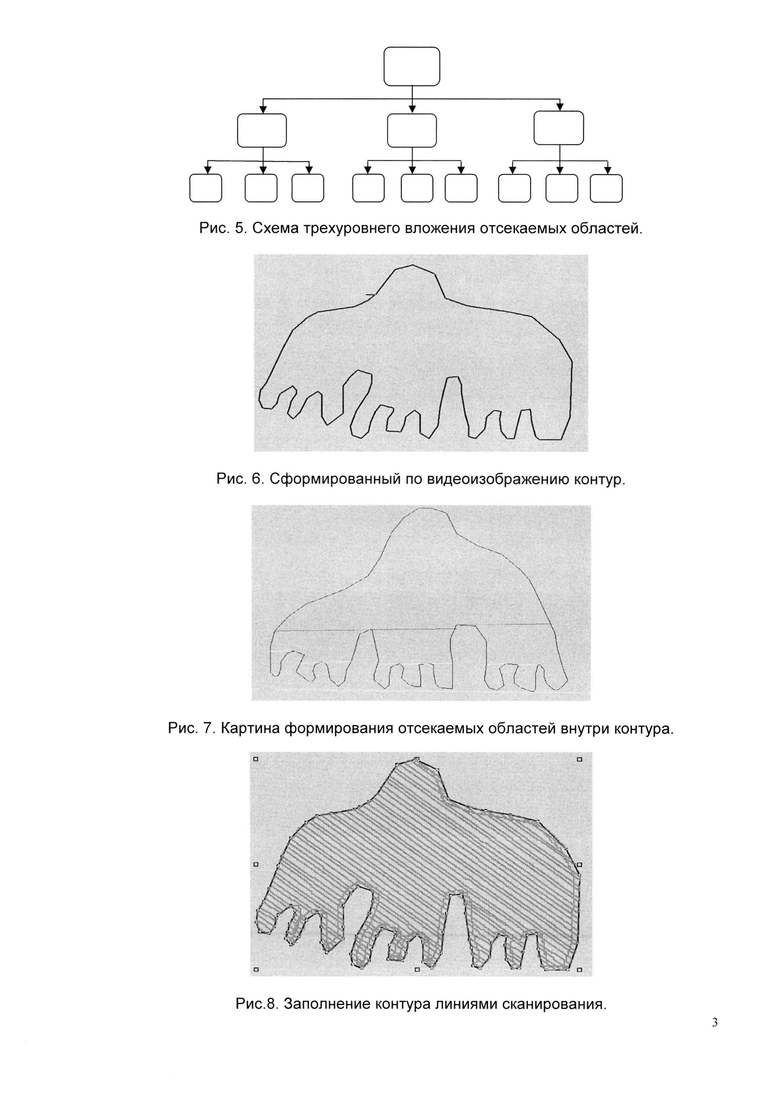
На рис. 5 в качестве примера формирования дерева отсекаемых областей показана реализованная в программном модуле (3) схема трехуровневого вложения отсекаемых областей.
По этому же принципу может быть построена схема многоуровнего (до 30 и более) вложения отсекаемых областей.
Для того чтобы не было многократного прохождения при сканировании по областям более верхнего уровня, сначала реализовано сканирование областей низшего уровня одной ветви, затем сканирование областей этого же уровня второй ветви и так далее, пока не будут отсканированы все области данного уровня во всех ветвях. Затем сканирование переходит на более высокий уровень по тому же принципу до достижения верхнего уровня.
Второй по значимости процедурой математической обработки является переход от одной отсекаемой области к другой. Этот переход осуществляется от точки окончания сканирования предыдущей области через область более высокого уровня. В программе предусмотрено, что при переходе от области низшего уровня к области этого же уровня следующей ветви, переход осуществляется через общую из этих ветвей область еще более высокого уровня.
Описанный выше алгоритм формирования дерева отсекаемых областей иллюстрирует рис. 6, 7 и 8.
Из проведенных рисунков понятно, что в основе алгоритма формирования дерева отсекаемых областей лежит определение точек пересечения линий сканирования с контуром фигуры.
Таким образом, значительное повышение роли компьютера в процесс проведения операции повышает точность и эффективность проведения лазерного воздействия на биоткань, а также снижает риск возникновения ошибки из-за человеческого фактора.
Предлагаемый лазерный хирургический комплекс с описанным выше алгоритмом работы программного обеспечения позволяет проводить точные органосохранные операции по выпариванию живой ткани внутри контура произвольной формы, что является существенным отличием от известных комплексов, в которых выпаривание обеспечивается только внутри контура фиксированной и заранее запрограммированной фигуры сканирования. Совокупность введенных блоков и связей представляет собой роботизированный лазерный хирургический комплекс, обеспечивающий автоматическое контролируемое выпаривание биоткани внутри заданного контура произвольной формы.
Совокупность изложенных в формуле изобретения признаков является новой, а само техническое решение удовлетворяет критерию «изобретательский уровень».
Это устройство может быть использовано для выполнения прецизионных и органосохранных операций в микрохирургии и в гинекологии.
Способ использования предлагаемого устройства для точного и органосохранного выпаривания живой ткани заключается в формировании хирургического луча СО2 лазера, совмещении его с видимым лучом пилотного лазера, доставке обоих лазерных лучей в операционное поле и совмещение их с оптической осью хирургического микроскопа или кольпоскопа с цифровой видеокамерой, оконтуривании пилотным лучом с помощью ручного привода видимой границы патологического участка биоткани, автоматическом формировании с помощью персонального компьютера траектории пилотного луча и ее отображение поверх видеоизображения операционного поля, воспроизведении отображенной траектории траекторией сканирования пилотного луча в автоматическом режиме по сигналам управления с персонального компьютера, пропорциональным координатам отображенной траектории и подаваемым на привод сканирующей системы, автоматическом сканировании лучом СО2 лазера внутри заданного контура патологической биоткани.
При таком способе использования предлагаемого устройства требуемая глубина выпаривания живой ткани в пределах заданного контура произвольной конфигурации обеспечивается за счет заранее выбранных в зависимости от намеченной тактики операции параметров излучения (мощность, режим излучения) и параметров сканирования (количества сканов, плотность заполнения и скорость сканирования).
Источники информации
1. Клинцова Л.В., Варев Г.А., Доронин В.А., Бакина О.Н. Применение СО2 лазера в оперативной гинекологии. Медицинская технология, рег. удостоверение №ФС-2005/086 от 22.11.2005 г., держатель подлинников ООО «Русский инженерный клуб», г. Тула (www.lasermed.ru).
2. Подмазов А.В., Варев Г.А., Залыгаев М.Б. Применение высокоэнергетических лазеров в оперативной отоларингологии. Медицинская технология, рег. удостоверение №ФС-2005/087 от 22.11.2005 г., держатель подлинников ООО «Русский инженерный клуб», г. Тула (www.lasermed.ru).
3. Патент RU 2163790 от 21.07.1999 г.
4. www.dekalaser.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СКАНИРУЮЩАЯ | 1999 |
|
RU2163790C1 |
| СПОСОБ РАССЕЧЕНИЯ БИОТКАНИ ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2632803C1 |
| ЛАЗЕРНЫЙ МЕДИЦИНСКИЙ ПРИБОР | 2000 |
|
RU2181572C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ТОЧКИ ЛУЧА ЭКСИМЕРНОГО ЛАЗЕРА | 1999 |
|
RU2162675C2 |
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЛАЗЕРНАЯ СИСТЕМА НА ОСНОВЕ ФЕМТОСЕКУНДНОГО ЛАЗЕРА | 2010 |
|
RU2423959C1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ЛАЗЕРНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ СИТАЛЛА | 2011 |
|
RU2463267C2 |
| СПОСОБ ПРОВЕДЕНИЯ ЛАЗЕРНОЙ ХИРУРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251990C1 |
| УСТАНОВКА СЕЛЕКТИВНОГО ЛАЗЕРНОГО СПЛАВЛЕНИЯ ИЛИ СПЕКАНИЯ | 2018 |
|
RU2678694C1 |
| Офтальмохирургическая рефракционная твердотельная лазерная система | 2018 |
|
RU2749346C1 |
| ЛАЗЕРНОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 1996 |
|
RU2113827C1 |

Группа изобретений относится к медицинской технике. Лазерный хирургический комплекс состоит из аппарата на СО2 лазере с пилотным лучом наведения, устройства видеонаблюдения операционного поля, устройства согласования лазерных лучей с устройством видеонаблюдения и сканирующей системы, согласованной с оптическим выходом аппарата на СО2 лазере и оптическим входом устройства согласования. Устройство видеонаблюдения снабжено цифровой видеокамерой и персональным компьютером, цифровая видеокамера согласована с оптической осью устройства видеонаблюдения и подключена к входу персонального компьютера, персональный компьютер снабжен программным обеспечением видеозахвата изображения пилотного луча на операционном поле, отображения траектории пилотного луча при его перемещении по контуру оперируемого участка и формирования траектории сканирования луча СО2 лазера внутри оконтуренного участка. Способ выпаривания живой ткани обеспечивает контролируемое выпаривание биоткани внутри заданного контура произвольной формы, повышает точность лазерного воздействия на биоткань, а также снижает риск возникновения ошибки из-за человеческого фактора. 2 н. и 2 з.п. ф-лы, 8 ил.
1. Лазерный хирургический комплекс, содержащий лазерный хирургический аппарат на CO2 лазере с пилотным лучом наведения, микропроцессорной системой управления и системой доставки излучения к операционному полю, сканирующую систему с оптическим блоком, исполнительным приводом и блоком управления, устройство видеонаблюдения операционного поля и устройство согласования лазерных лучей с оптической осью устройства видеонаблюдения, снабженного приводом управления пилотным лучом в поле зрения устройства видеонаблюдения, отличающийся тем, что с целью повышения точности и органосохранности лазерных операций по выпариванию живой ткани устройство видеонаблюдения снабжено цифровой видеокамерой, согласованной с оптической осью устройства видеонаблюдения и персональным компьютером с программным обеспечением видеозахвата изображения пилотного луча на операционном поле, определения его траектории при перемещении по контуру произвольной конфигурации и формирования траектории сканирования луча CO2 лазера внутри оконтуренного участка, выход видеокамеры подключен к входу персонального компьютера, выход персонального компьютера подключен к входу микропроцессорной системы управления лазерного аппарата и к входу блока управления сканирующей системы.
2. Устройство по п. 1, отличающееся тем, что в качестве привода управления пилотным лучом в поле зрения устройства видеонаблюдения используется исполнительный привод сканирующей системы, который в режиме оконтуривания оперируемого участка пилотным лучом управляется вручную с помощью органов управления персонального компьютера («мышь», клавиатура).
3. Устройство по п. 1, содержащее устройство отсасывания продуктов испарения биоткани из операционной зоны воздействия луча CO2 лазера, снабженное электронным коммутатором и электронным регулятором оборотов всасывающей турбины, входы которых подключены к микропроцессорной системе управления для синхронизации работы устройства отсасывания и CO2 лазера.
4. Способ хирургического выпаривания живой ткани, в котором:
1) генерируют в видимой области спектра пилотный лазерный луч, совмещенный с операционным лучом CO2 лазера;
2) доставляют пилотный лазерный луч в операционное поле и совмещают его с оптической осью устройства видеонаблюдения операционного поля с встроенной цифровой видеокамерой (хирургический микроскоп или кольпоскоп);
3) формируют на экране монитора персонального компьютера с помощью устройства видеонаблюдения с цифровой видеокамерой изображение пятна пилотного лазера на операционном поле;
4) вручную с помощью привода управления пилотным лучом перемещают пятно пилотного лазера по контуру патологического участка биоткани;
5) по видеосигналу с цифровой видеокамеры определяют с помощью персонального компьютера и соответствующего математического аппарата координаты траектории пилотного луча в процессе ручного оконтуривания патологического участка биоткани и отображают эту траекторию поверх видеоизображения операционного поля;
6) передают из персонального компьютера массив данных с координатами траектории пилотного луча во внешнюю память микроконтроллера блока управления сканирующей системы и по сигналам управления с блока управления автоматически воспроизводят заданную вручную траекторию пилотного луча;
7) визуально контролируют совпадение заданной вручную и воспроизведенной в автоматическом режиме траекторий пилотного луча и формируют с помощью персонального компьютера и соответствующего математического аппарата траекторию сканирования луча CO2 лазера внутри заданного контура патологической биоткани;
8) формируют с помощью персонального компьютера сигнал управления на микропроцессорную систему управления и блок управления сканирующей системы для начала генерации излучения СО2 лазера, начала сканирования луча CO2 лазера и начала работы устройства отсасывания продуктов испарения;
9) генерируют операционный луч CO2 лазера с заданными энергетическими параметрами, включают устройство отсасывания продуктов испарения, регулируют в автоматическом режиме по сигналам с микропроцессорной системы управления ее производительность в зависимости от заданных энергетических параметров излучения CO2 лазера, сканируют операционным лучом внутри заданного контура патологической биоткани, добиваясь требуемой глубины выпаривания живой ткани в пределах заданного контура за счет выбора количества сканов, мощности излучения и скорости сканирования.
| СИСТЕМА СКАНИРУЮЩАЯ | 1999 |
|
RU2163790C1 |
| US5411502A, 02.05.1995 | |||
| ОФТАЛЬМОХИРУРГИЧЕСКАЯ ЛАЗЕРНАЯ СИСТЕМА НА ОСНОВЕ ФЕМТОСЕКУНДНОГО ЛАЗЕРА | 2010 |
|
RU2423959C1 |
| EP1880698A1, 23.01.2008. | |||

