Изобретение относится к системе автоматического вождения на рабочем гоне.
Известны системы ручного вождения трактора с автоматическим возвращением колес в позицию прямолинейного движения по: RU 2488508, RU 2464194, US 5195603, и системы точного автоматического вождения сигналами ведущего датчика положения по: SU 743611, SU 1685283, SU 1748683, SU 1789091. Например, система высокоточного автоматического вождения по SU 1685283 на тракторе универсале ЛТЗ-155 в 90-х годах успешно прошла государственные испытания в УкрНИИПИТ, пгт Дослiдне Киевской обл.
Известна также система автоматического вождения колесного трактора с шарнирно-соединенными полурамами по SU 1598895, предназначенная для полигонных испытаний, не требующих такой точности вождения, как на пропашных работах.
Недостаток известных систем точного автоматического вождения в том, что они применимы только для трактора с колесами, поворотными относительно корпуса моста.
Известна система автоматического вождения трактора универсала, содержащая гидроусилитель сигнала ведущего датчика положения, гидроруль поворота вокруг вертикальной оси шарнирно-соединенных полурам с рессорами и мосты колес, например, «Устройство для автоматического направления движения трактора с шарнирно-сочлененной рамой» по SU 1598895 - принятое за ближайший аналог.
Недостаток - такой системой невозможно точное вождение на пропашных работах.
Задачей и техническим результатом изобретения является система автоматического вождения трактора универсала с шарнирно-соединенными полурамами, которой на рабочем гоне автоматически поворачивают вокруг вертикальной оси корпус переднего моста относительно передней полурамы на угол до ±3°…±5°. Для разворота в конце гона вращением руля поворачивают на 7° корпус переднего моста и затем полурамы до 30°. После разворота обратным вращением руля поворачивают в позицию соосности полурамы и, удерживая их соосно автоматически, далее вращением руля в позицию прямолинейного движения возвращают корпус переднего моста, следовательно, весь трактор универсал.
1. Сущность изобретения - система автоматического вождения трактора универсала, содержащая гидроусилитель сигнала ведущего датчика положения, гидроруль поворота вокруг вертикальной оси шарнирно-соединенных полурам с рессорами и мосты колес, отличающаяся тем, что выходные каналы гидроусилителя сигнала ведущего датчика положения сообщены через двусторонние гидрозамки с гидроцилиндрами поворота корпуса переднего моста вокруг расположенной между рессорами второй вертикальной оси и с входными каналами автоматического стабилизатора соосности полурам.
2. Сущность изобретения еще и в том, что система по п. 1 содержит на задней полураме ведомый датчик положения с гидроусилителем, соединенным кинематической обратной связью с корпусом заднего моста, установленным с возможностью поворотов гидроцилиндром вокруг вертикальной оси, расположенной между неповоротными колесами этого моста, причем этот гидроцилиндр сообщен с выходными каналами гидроусилителя датчика положения.
Благодаря этому получают систему автоматического вождения трактора универсала, которой для точного движения на рабочем гоне автоматически поворачивают вокруг вертикальной оси корпус переднего моста относительно передней полурамы на угол до ±3°…±5°. Для разворота в конце гона вращением руля поворачивают на 7° корпус переднего моста и затем полурамы до 30°. После разворота обратным вращением руля в позицию прямолинейного движения возвращают обратным порядком трактор универсал в целом. Для высокоточного вождения применяют трактор универсал с двумя автоматически управляемыми мостами. Поэтому таким трактором выполняют не только сплошную обработку почвы, транспортные, другие работы общего назначения. Высокоточным вождением трактора универсала выполняют также пропашные работы в агрегате с сеялками, культиваторами, свеклоуборочными и другими машинами.
Устроена система автоматического вождения (далее CAB) трактора универсала (далее трактора), например, следующим образом.
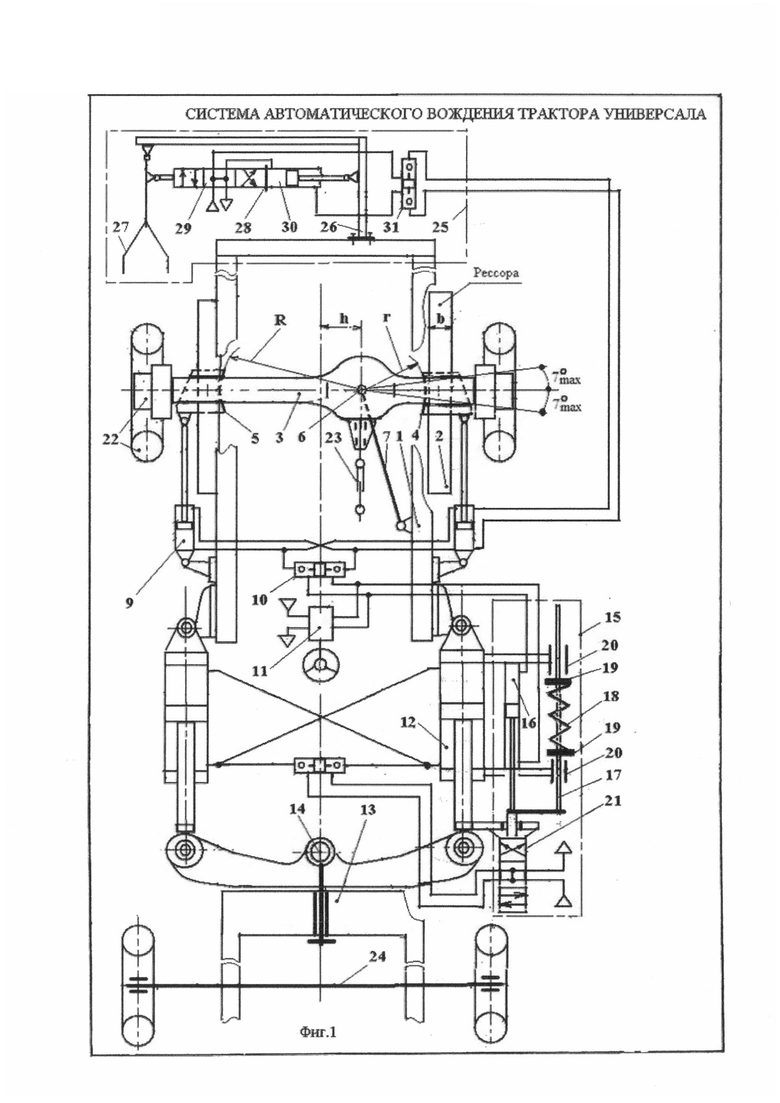
На фиг. 1 - схема CAB трактора с передним автопилотом.
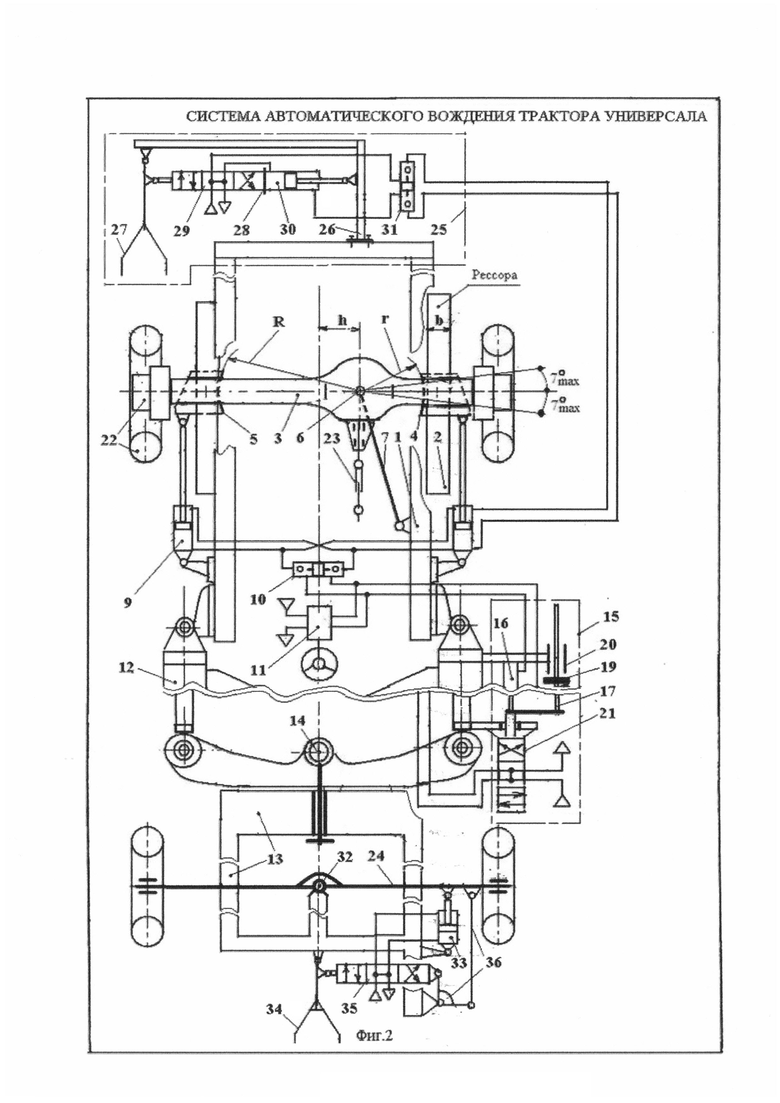
На фиг. 2 - фрагмент схемы CAB трактора с передним и задним автопилотами.
Условные обозначения на фиг. 1, 2 (маслопроводы показаны линиями без номера):
1 - передняя полурама (далее рама),
2 - правая-левая рессора, листы которой шириной b с верхней и нижней накладками стянуты хомутами и центровой заклепкой «впотай», концы коренных листов установлены в приклепанных к раме 1 кронштейнах, причем рессоры снабжены амортизаторами и механизмом блокировки, как у трактора типа ХТЗ-150К-12 [1], а расстояние между осями центровых заклепок пары рессор равно L, (далее рессора),
3 - передний ведущий мост с подвесами к рессорам 2, причем ось ведущей конической шестерни главной передачи ассиметрична на h мм в сторону пусть правого борта трактора, причем колеса относительно корпуса моста неповоротные, (далее мост),
4 - приваренный к корпусу моста 3 правый подвес к рессоре 2. Цилиндрическая стенка подвеса вертикальна, касается кромок рессоры 2 и выполнена по формуле:

5 - приваренный к корпусу моста 3 левый подвес к рессоре 2. Цилиндрическая стенка подвеса вертикальна, касается кромок рессоры 2 и выполнена по формуле:
6 - вертикальная ось шарнира, расположенного между рессорами на линии пересечения вертикальной плоскости по оси моста 3 с вертикальной плоскостью по оси ведущей конической шестерни главной передачи, причем шарнир выполнен в виде приваренного снизу к корпусу моста 3 стержня со сферическим подшипником ГОСТ 3635-78 на конце реактивной тяги, (далее шарнир),
7 - реактивная тяга между шарниром 6 моста 3 и рамой 1, причем сферические подшипники ГОСТ 3635-78 реактивная тяга содержит на обоих концах, (далее тяга),
8 - установленный вертикально между рессорой 2 и стенкой кронштейна рамы 1 клин, предназначенный для устранения зазора между цилиндрической поверхностью подвеса 4, 5 и внутренней боковой кромкой рессоры 2, зазора обусловленного штатными допусками на изготовление, (далее клин),
9 - гидроцилиндр поворота моста 3 вокруг шарнира 6 до 7°, причем гидроцилиндр соединен с рамой 1 и мостом 3 сферическими шарнирами, (далее цилиндр),
10 - двусторонний гидрозамок между цилиндрами 9 и гидрорулем (далее замок),
11 - гидроруль, например, выполненный в виде гидроруля трактора ХТЗ-150К-12, или гидроусилителя руля по RU 2464194, или по RU 2488508, (далее гидроруль),
12 - гидроцилиндр взаимного поворота полурам на колесах (далее цилиндр),
13 - шарнирно-соединенная с рамой 1 задняя полурама, содержащая еще и продольный горизонтальный шарнир, как у трактора типа ХТЗ-150К-12, (далее рама),
14 - вертикальная ось шарнира рам 1,13, связанных цилиндрами 12, (далее шарнир),
15 - автоматический стабилизатор соосности рам 1 и 13 между собой, связывающий управляющие каналы гидроруля 11 с цилиндрами 12, (далее стабилизатор),
16 - стабилизатора 15 сигнальный гидроцилиндр (далее цилиндр),
17 - стержень, с которым соединен шток цилиндра 16, (далее стержень),
18 - сжатая на пороговое усилие центрирующая пружина, установленная между подвижными и неподвижными упорами на стержне 17, (далее пружина),
19 - подвижный упор в виде диска с отверстием, посаженный подвижной посадкой на стержень 17 с упорным кольцом ГОСТ 13942-68 с внешней стороны, причем наружный диаметр диска не меньше наружного диаметра пружины 18, (далее упор),
20 - прикрепленный к цилиндру 2 неподвижный упор с отверстием, сквозь которое с зазором проходит стержень 17 с кольцом ГОСТ 13942-68, (далее упор),
21 - гидрораспределитель типа ГА-31000, у которого отрицательное перекрытие золотника 0,5 мм ([2], с. 132, рис. 151), но для большего давления, (далее распределитель),
22 - колесо с планетарным колесным редуктором и тормозом, неповоротное относительно корпуса моста 3, (далее колесо),
23 - привода моста 3 телескопический карданный вал с синхронными шарнирами по [3] с. 46, рис. 11.37а), или по RU 2431065, или с шарнирами Гука, (далее кардан),
24 - мост с неповоротными относительно его корпуса колесами, соединенный с рамой 13: а) неподвижно, б) шарниром 32, в) через рессоры по а), б), (далее мост),
25 - передний автопилот для вождения трактора в агрегате с машинами (например, для уборки сахарной свеклы: а) передней ботвоуборочной, б) задней корнеуборочной, или в) иначе), причем его прикрепляют к передней машине или к трактору, (далее автопилот),
26 - рама автопилота 25 (далее рама),
27 - ведущий датчик положения, содержащий подпружиненные к поверхности почвы и расположенные в междурядьях щупы рядков свеклы, (далее датчик),
28 - гидроусилитель сигнала датчика 27 (далее усилитель),
29 - усилителя 28 гидрораспределитель типа ГА-31000, у которого отрицательное перекрытие золотника 0,5 мм ([2], с. 132, рис. 151), причем золотник связан кинематически с датчиком 27, (далее распределитель),
30 - усилителя 28 гидроцилиндр, соединенный с распределителем 29 жестко, причем шток соединен шарнирно с рамой 26, (далее цилиндр),
31 - двусторонний гидрозамок, охватывающий выходные каналы усилителя 28, (далее замок),
32 - вертикальная ось шарнира соединения корпуса моста 24 с полурамой 13 (далее шпрнир),
33 - гидроцилиндр, который гидравлически сообщен с выходными каналами гидроусилителя сигнала ведомого датчика, (далее цилиндр),
34 - на раме 13 ведомый датчик положения, пусть копир-водитель SU 743611 по междурядьям свеклы с подпружиненными к почве щупами рядков свеклы, (далее датчик),
35 - гидроусилитель сигнала в виде гидрораспределителя типа ГА-31000 [2] с. 132, рис. 151, у которого золотник связан кинематически с датчиком 34, (далее усилитель),
36 - кинематическая обратная связь усилителя 35 с корпусом моста 24, выполненная в виде кинематических звеньев, (далее связь).
Управляющие каналы гидроруля 11 связаны через стабилизатор 15 соосности рам 1, 13 с гидроцилиндрами 12 взаимного поворота этих рам, соединенных вертикальным шарниром 14. Параллельно цилиндру 12 установлен сигнальный цилиндр 16 стабилизатора так, что их корпуса соединены жесткими кронштейнами, а шток сигнального цилиндра соединен со стержнем 17. Установленная на этом стержне пружина 18 сжата на такое пороговое усилие при принятом диаметре цилиндра 16, что ее дополнительно сжимают цилиндром 16 только при давлении масла больше рабочего давления в цилиндрах 9 при повороте моста 3 относительно рамы 1. Полости цилиндра 16 сообщены с управляющими каналами гидроруля и через него со сливом масла в бак. На пороговое усилие пружина 18 сжата между передним и задним упорами 19, которые касаются соответственно переднего, заднего упоров 20, размещенных на консольной части жестких кронштейнов, соединяющих цилиндры 12 и 16. Шток цилиндра 16 соединен также с золотником распределителя 21, корпус которого прикреплен к кронштейну, закрепленному на штоке цилиндра 12. Управляющие каналы распределителя 21 сообщены маслопроводами с полостями цилиндров 12, а входной и выходной каналы сообщены с насосной станцией трактора. В позиции прямолинейного движения трактора золотник распределителя 21 находится в нейтральной позиции, то есть в позиции открытого центра. Цилиндры 12, распределитель 21, цилиндр 16, пружина 18 и детали 36 механической связи между ними образуют автоматический следящий контур с отрицательной обратной связью. На раме 13 с поворотным вокруг шарнира 32 ведущим или пассивным мостом 24 монтируют задний автопилот, содержащий: цилиндр 33, датчик 34, усилитель 35, звенья обратной кинематической связи 36.
Пусть (первый вариант) трактор соединен с передней ботво- и задней корне-свеклоубоочными машинами, например, по RU 2443096 и RU 2447639. В этом варианте автопилот 25 устанавливают на ботвоуборочную машину, присоединив к ее переднему брусу раму 26, и маслопроводами сообщают: а) входные каналы усилителя 28 с насосной станцией трактора, б) выходные каналы усилителя 28 через замок 31 с цилиндрами 9. Если трактор соединен только с задней машиной (второй вариант), то автопилот 25 устанавливают на трактор, присоединив раму 26 к переднему брусу рамы 1.
Пусть трактор соединен с культиватором междурядной обработки всходов сахарной свеклы. Подпружиненные к почве щупы датчика 27 и датчика 34 содержат чувствительные элементы (пусть магнитотранзисторы) траектории в виде внесенных сеялкой в ее два средних рядка марганцовой руды (якобсит Mn2+Fe2 3+O4), железной руды (магнетит Fe2+Fe2 3+O4) или их смеси. Передний, задний автопилот содержит схему сравнения и усилитель электронного сигнала, направляющие датчик 27, 34 по траектории. Таким автопилотом автоматическое вождение трактора выполняют с большей точностью, на большей скорости, много дешевле, чем навигатором ГЛОНАСС или GPS + RTK, пусть CAB типа Auto-Guide 3000 на тракторе Challenger МТ 900 [сайт: challenger-ag.com].
Работа. Пусть трактор с навесной уборочной машиной ведут по междурядьям сахарной свеклы автопилотом 25, имеющим копир-водитель по SU 743611, датчик 27, щупы которого контактируют с рядками корнеплодов сахарной свеклы, и копируют искривления рядков. Этим вырабатывают сигнал рассогласования (при отклонении колес моста 3 от оси междурядий) в виде перемещения золотника распределителя 29, которым включают подачу масла в штоковую или поршневую полость цилиндра 30. При этом в штоковую полость цилиндра 30 масло подают через полости цилиндров 9. Соответственно этому поворачивают мост 3 вокруг вертикальной оси шарнира 6 на угол не более 3°…5°, что, на наш взгляд, вполне достаточно, и этим направляют колеса 22 переднего моста трактора точно по междурядьям вдоль рядков сахарной свеклы. При этом стабилизатором 15 рамы 1, 13 автоматически удерживают взаимно соосно и неподвижно относительно шарнира 6 пружиной 18, распределителем 21 и цилиндрами 12. Работа заднего автопилота, учитывая вышеизложенное, понятна из схемы на фиг. 2. Перед разворотом в конце гона датчики 27 и 34 гидроцилиндрами (на фиг. 1, 2 не показаны) поднимают в транспортное положение и фиксируют от боковых качаний вилочным ловителем.
Для крутого разворота в конце рабочего гона вправо (влево) вращают руль гидроруля 11 вправо (влево) и сначала поворачивают до упора корпус моста 3. Затем дальнейшим вращением руля масло гидрорулем 11 направляют в штоковую (поршневую) полость цилиндра 16, втягивают шток в цилиндр 16 (выталкивают шток из цилиндра 16), перемещают стержень 17, упорным кольцом на стержне 17 отводят задний (передний) упор 19 от заднего (переднего) упора 20. Этим дополнительно сжимают пружину 18, перемещают золотник распределителя 21 так, что направляют масло в штоковую (поршневую) полость правого цилиндра 12 и в поршневую (штоковую) полость левого цилиндра 12. Этим рамы 1, 13 взаимно поворачивают вокруг шарнира 6. Чем больше поворачивают руль, тем больше перемещают шток цилиндра 16, тем больше сжимают пружину 18, тем на больший угол поворачивают рамы 1, 13 вокруг шарнира 6, тем круче поворачивают трактор. При вращении руля в обратном направлении вначале возвращают в исходную позицию (причем автоматически и точно) рамы 1, 13 и только далее в позицию прямолинейного движения возвращают корпус моста 3. При необходимости мост 3, 24 блокируют от поворотов тягой, устанавливаемой параллельно цилиндрам 9, 33.
При корректировке движения трактора в междурядьях работой CAB одновременно с двумя управляемыми мостами 3, 24 исключают занос задней навесной машины. Этим повышают точность ориентации ее рабочих органов. Работа заднего автопилота понятна из схемы на фиг. 2 и дополнительных пояснений не требует.
На посеве, междурядной обработке пропашных культур с междурядьями 700 мм штатные колеса трактора с шинами 21,3R24 мод. ФД-14А посредством переходных ступиц устанавливают на колею 2800 мм (в другом варианте используют колеса с шинами 16,9 R38 модели TR-201 также на колее 2800 мм). Для обработки плантации с междурядьями 450 мм на трактор устанавливают четыре колеса с шиной 11,2R44 модели ДЕ-15 или с шиной 13,6R38 модели TR-07 на колею 1800 мм или на колею 2700 мм.
Итак: Получают систему автоматического вождения трактора универсала, которой для точного движения на рабочем гоне автоматически поворачивают корпус переднего моста вокруг расположенного между рессорами вертикального шарнира до 3°…5°. Для крутого разворота в конце рабочего гона вращением руля еще взаимно поворачивают до 30° полурамы с мостами колес. После разворота обратным вращением руля вначале поворачивают в позицию взаимной соосности полурамы и удерживают их автоматически и точно соосно. Дальнейшим вращением руля в позицию прямолинейного движения возвращают корпус переднего моста и, следовательно, трактор универсал в целом.
Получают трактор универсал с качествами: а) трактора с шарнирно-соединенными полурамами, б) пропашного трактора с системой ручного и/или автоматического вождения на рабочем гоне поворотом корпуса переднего ведущего моста вокруг расположенного между рессорами второго вертикального шарнира, г) трактора с высокой точностью автоматического вождения передним и задним мостами одновременно.
Источники информации
1. Трактор ХТЗ-150К-12. Руководство по эксплуатации 151.00.000.РЭ. "Харьковский тракторный завод им. С. Орджоникидзе", Харьков, 2007.
2. Гидравлические агрегаты тракторов и сельскохозяйственных машин. Часть 1. Каталог. М.: ЦНИИТЭИавтосельхозмаш. 1989, 137 с.
3. B.C. Поляков и др. Справочник по муфтам / Под ред. В.С. Полякова, 2-е изд., испр. и доп. - Л.: Машиностроение, Ленинградское отделение, 1979. - 334 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР-УНИВЕРСАЛ С ШАРНИРНО СОЕДИНЁННЫМИ ПОЛУРАМАМИ | 2014 |
|
RU2576847C2 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА КОЛЁС И ПОЛУРАМ ТРАКТОРА | 2015 |
|
RU2590762C2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ПРОПАШНОЙ ГУСЕНИЧНЫЙ ТРАКТОР | 2009 |
|
RU2392163C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ВСЕМИ КОЛЁСАМИ ТРАКТОРА | 2013 |
|
RU2545157C1 |
Изобретение относится к области транспортного машиностроения. Система автоматического вождения трактора универсала содержит гидроусилитель сигнала ведущего датчика положения, гидроруль поворота вокруг вертикальной оси шарнирно-соединенных полурам с рессорами и мосты колес. Выходные каналы гидроусилителя сигнала ведущего датчика положения сообщены через двусторонние гидрозамки с гидроцилиндрами поворота корпуса переднего моста вокруг расположенной между рессорами второй вертикальной оси и с входными каналами автоматического стабилизатора соосности полурам. Достигается повышение точности вождения трактора на пропашных работах. 1 з.п. ф-лы, 2 ил.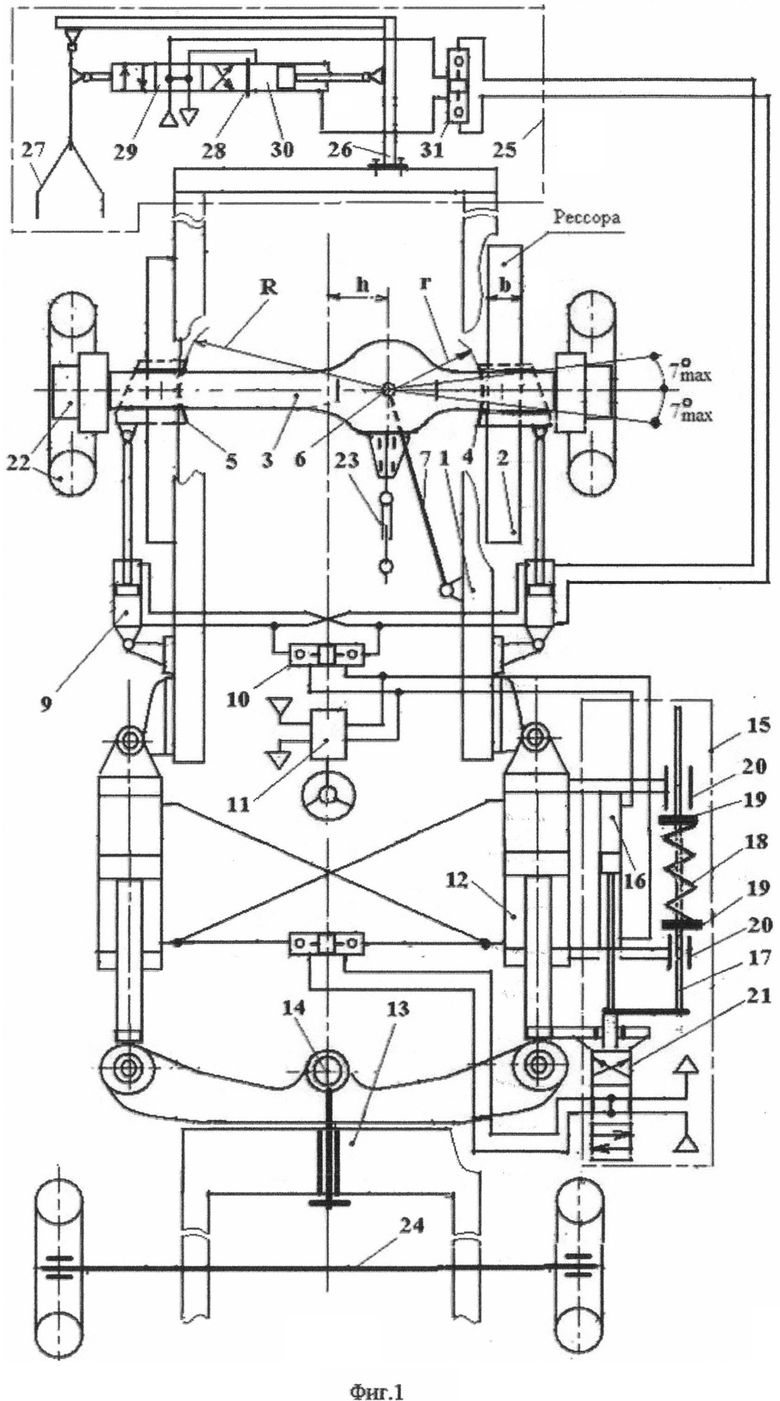
1. Система автоматического вождения трактора универсала, содержащая гидроусилитель сигнала ведущего датчика положения, гидроруль поворота вокруг вертикальной оси шарнирно-соединенных полурам с рессорами и мосты колес, отличающаяся тем, что выходные каналы гидроусилителя сигнала ведущего датчика положения сообщены через двусторонние гидрозамки с гидроцилиндрами поворота корпуса переднего моста вокруг расположенной между рессорами второй вертикальной оси и с входными каналами автоматического стабилизатора соосности полурам.
2. Система по п.1, отличающаяся тем, что содержит на задней полураме ведомый датчик положения с гидроусилителем, соединенным кинематической обратной связью с корпусом заднего моста, установленным с возможностью поворотов гидроцилиндром вокруг вертикальной оси, расположенной между неповоротными колесами этого моста, причем этот гидроцилиндр сообщен с выходными каналами гидроусилителя датчика положения.
| Система рулевого управления транспортного средства | 1980 |
|
SU872358A1 |
| Колесное транспортное средство | 1985 |
|
SU1260268A1 |
| Способ поддержания горных выработок на больших глубинах | 1987 |
|
SU1502839A1 |

