Изобретение относится к трактору со всеми управляемыми колесами типа трактора ЛТЗ-155, но с автоматически управляемыми на рабочем гоне и передними, и задними колесами и к способу автопилотирования (то есть автоматического вождения) машинно-тракторного агрегата (далее МТА) на рабочем гоне не менее, чем двумя автопилотами.
Известны тракторы и способы автопилотирования МТА по местным ориентирам, включающие автопилотирование на рабочем гоне по следу в виде рядка корнеплодов. Например, по SU 743611 с копир-водителями по SU 247674. Их более 30 лет применяют в свеклоуборочной машине КС-6Б [1] с.71 сверху, с.70, рис.47.
Известны тракторы со всеми управляемыми колесами, например ЛТЗ-155 [2] с.16, и др., а также по RU 2464194 - ближайший аналог трактора точного хода.
Известен способ автопилотирования по SU 1685283, принятый за ближайший аналог способа, который в начале 90-х годов успешно прошел государственные испытания (институт испытания машин, п.г.т. Дослидне Киевской обл.) на МТА с трактором ЛТЗ-155, передней ботво- и задней корнеуборочной машинами с автопилотом управления передними колесами и с автопилотом управления задними колесами трактора (УкрНИИСХОМ, фото приложено). Так, например при взятии проб, на государственных испытаниях свеклоуборочный МТА с автоматическим управлением передними и задними колесами трактора ЛТЗ-155 передним и задним автопилотами по SU 1685283 на скоростях до 11 км/ч имел потери не выкопанными корнями менее 0,1% (это были только хвостовые части корней свеклы) благодаря высокой точности вождения. При автопилотировании ЛТЗ-155 только передними колесами потери были соизмеримы с потерями не выкопанными корнями, как у машины КС-6Б, то есть как минимум на порядок больше.
Недостаток приведенных выше тракторов и способов в том, что:
а) Эти способы работоспособны только при наличии твердого и достаточно прочного контактного следа для щупов копир-водителя автопилота, в частности рядков сахарной свеклы с необрезанной или с обрезанной ботвой.
б) Автопилот управления задними колесами ЛТЗ-155 с тягой обратной связи смонтирован на балке заднего моста (см. SU 1685283), что неудобно. Рулевое управление задними колесами отключено, радиус разворота в конце гона увеличен, что нежелательно. Известен также автопилот с гидрораспределителем и дозирующим поршневым мотор-насосом (SU 1817958, позиции 45-49, далее дозатор) в виде двух гидроцилиндров, причем полости одного сообщены с управляющими каналами гидрораспределителя (позиция 26), другого с гидроцилиндром управления колесами трактора (SU 1817958, позиции: 44, 43).
Известны способы и автопилоты вождения МТА, использующие дальномерные измерения до местных ориентиров: SU 1781652, SU 1793833, SU 1817958, SU 2025924 и др., в том числе универсальные способы автопилотирования МТА по равноотстоящим траекториям: параллельным SU 1607710, SU 2021655, спиральной SU 1672949.
Недостаток их в том, что работа в этом направлении осталась незавершенной, так как после 1991 г. не стало ни СССР, ни УкрНИИСХОМа - и заказчика, и исполнителя работы.
Известны глобальные системы ориентации: ГЛОНАСС (РФ), DGPS (США) [3] с.82-86, и к ним автопилоты трактора: Agri 2,0, AGROCOM T-DRIVE, Trimble AgGPS и др.
Недостаток их в том, что в комплекте со станцией RTK один автопилот стоит 20…40 тысяч долларов, а расходы с учетом стоимости ГЛОНАСС (РФ), DGPS (США), которые пользователям пока бесплатны, много больше систем вождения по местным ориентирам. Для применения глобальной системы требуется еще и картографирование плантации.
Недостаток глобальных систем и в том, что все помехи для определения подлинных координат с точностью 2 см (рекламируемой) даже перечислить сложно, тем более учесть поправками. Например, ветер гоняет стаи туч, которые пересекают дальномерные линии к спутникам, то автопилоту, то RTK, а влажность, температура, давление, преломление атмосферы в тучах заметно влияют на скорость прохождения радиоволн и соответственно на точность измерений координат. И еще риск безопасности от RTK: на кого работает?
Общий недостаток известных способов автопилотирования (кроме SU 1685283) еще в том, что вождение поворотом только передних колес трактора недостаточно для точного движения рабочих органов сельхозмашины МТА при асимметричном сопротивлении почвы, на боковых уклонах и, чаще всего, из-за „заноса" задней сельхозмашины МТА противоположно корректировке в первые мгновения поворота передних колес трактора.
МТА с трактором точного хода и с автопилотами по местным ориентирам, на наш взгляд, дешевле точнее и быстроходнее, чем МТА с автопилотами глобальных систем.
Известны ферромагнитные тела, например, минерал магнетит FeO·Fe2O3 - железная руда, 72,4% железа, магнитная восприимчивость æ=8…25 единиц СИ; минерал якобсит MnFe2O4 - марганцевая руда, магнитная восприимчивость æ=250 единиц СИ, а также известны способы обнаружения и измерения расстояний до таких тел, измерением напряженности магнитного поля на расстояниях 10-3 мм…100 мм с погрешностью до 3…5% [4] с.70 строки 2 и 1 снизу, с.71 строки 11, 12, и 17, 18. Эти свойства вполне допустимо, на наш взгляд, использовать для прецизионного автопилотирования преимущественно пропашных МТА. Почва тоже содержит ферромагнитные компоненты, но имеет очень небольшую магнитную восприимчивость æ=(24…87)·10-5 единиц СИ.
Задачей и техническим результатом изобретения является изыскание трактора точного хода и способа автопилотирования МТА передними и задними колесами трактора по местным ориентирам, причем преимущественно без электронных приборов вне МТА.
Сущность изобретения:
1. Трактор точного хода, содержащий преобразователь поворота руля на входе в подачу дозы рабочей жидкости из его выходных каналов и следящий контур поворота колес каждого моста управляемых колес, включающий сообщенный гидравлически с преобразователем поворота руля сигнальный гидроцилиндр, шток которого связан с центрирующей пороговой пружиной и через гидрораспределитель с поворотными колесами, причем управляющие каналы этого гидрораспределителя сообщены с силовым гидроцилиндром поворота колес; и по изобретению полости сигнального гидроцилиндра сообщены гидравлически еще и с насос-мотором дозатора автопилота.
2. Трактор по п.1, у которого по изобретению линия гидравлического управления для выключения блокировки дифференциала сообщена с выходными каналами преобразователя поворота руля через клапан ИЛИ с возможностью автоматического выключения блокировки дифференциала одновременно с началом поворота колес.
3. Способ автопилотирования машинно-тракторного агрегата по местным ориентирам, включающий автопилотирование на рабочем гоне по следу, причем в соответствии с изобретением в почву вносят ферромагнитный минерал, которым создают магнитный след, определяют отклонение машины агрегата от следа измерением его магнитного поля и полученный сигнал вводят на вход системы вождения трактора.
4. Универсальный способ автопилотирования машинно-тракторного агрегата по местным ориентирам, включающий автопилотирование на рабочем гоне, при этом по изобретению бортовыми дальномерами агрегата измеряют расстояния до неподвижных ориентиров на местности, причем по измеренным расстояниям вычисляют отклонение машинно-тракторного агрегата от следа продольно-вертикальной плоскости на поверхности почвы параллельных рабочих гонов и соответственно отклонению вырабатывают сигнал, который подают на вход системы вождения трактора.
5. Способ визуального контроля точности вождения машинно-тракторного агрегата, включающий, нанесение маркерного следа на поверхность почвы, причем по изобретению наблюдают совмещение с маркерным следом луча лазерного излучения из агрегата.
Благодаря трактору по пп.1, 2 и способам по пп.3, 4 формулы изобретения (далее ф-лы), выполняют прецизионное с повышенной скоростью автопилотирование МТА по следу ферромагнитного минерала на посеве и междурядной культивации пропашных культур, а на уборке по следу в виде рядков корнеплодов, стеблей кукурузы и др., причем сигналы автопилотов сельхозмашин передают на трактор по маслопроводам.
Благодаря трактору по пп.1, 2 и способам по пп.3, 5 формулы изобретения точным автопилотированием выполняют все полевые работы без ограничения скорости МТА.
Возможно также комбинированное использование способов по пп.3, 4, 5 формулы.
При дальнейшем развитии этих способов автопилотирования, МТА еще и разворачивают в конце гона автоматически по координатам из памяти компьютера.
Устроены: трактор точного хода (далее трактор), уборочный МТА, посевной МТА, культиваторный МТА, например, следующим образом.
На фиг.1 - трактор по п.1 ф-лы и автопилоты контактного следа: передний, задний, управляющие соответственно передними и задними колесами трактора и включением-выключением блокировки дифференциала ведущего моста.
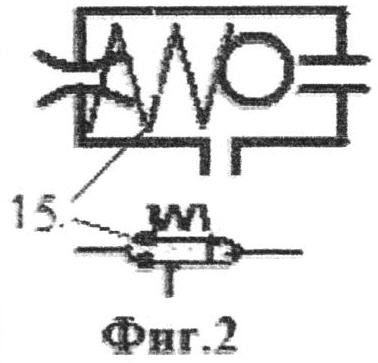
На фиг.2 - устройство клапана ИЛИ, но поджатого пружиной.
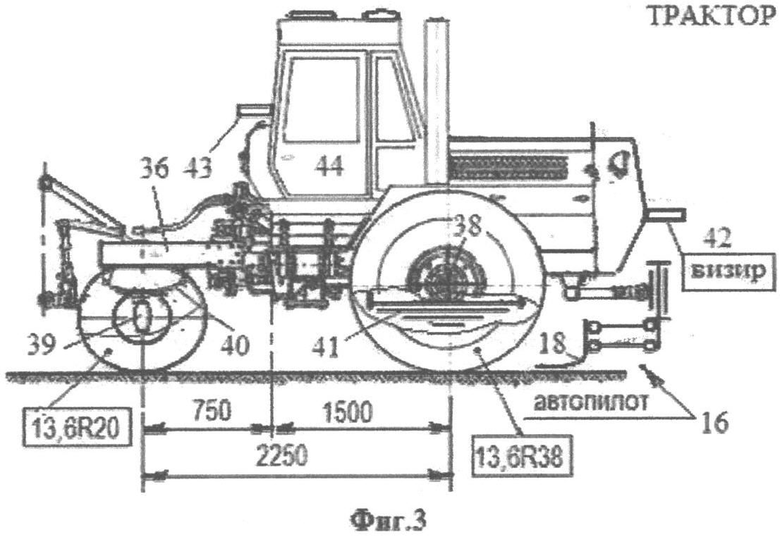
На фиг.3 - трактор с передним автопилотом контактного, магнитного следа, вид сбоку.
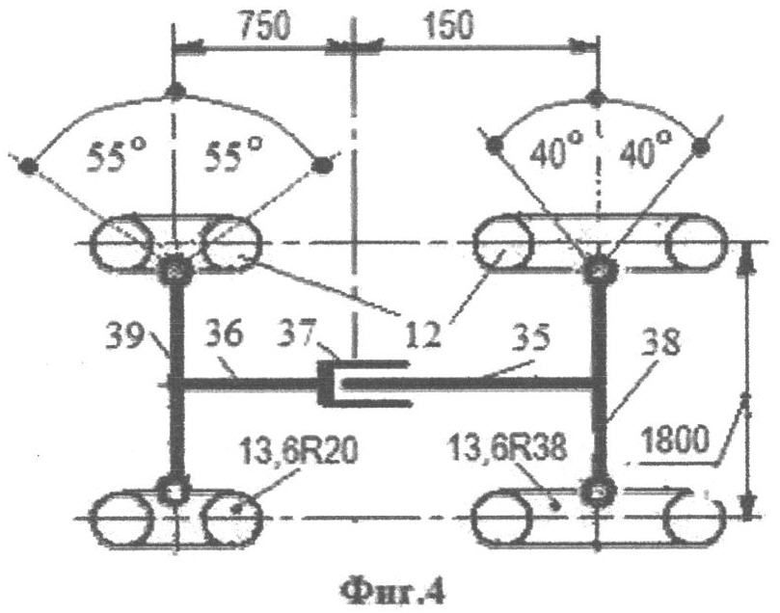
На фиг.4 - колесная схема трактора: колея 1800 мм для междурядий 450, 600, 900 мм.
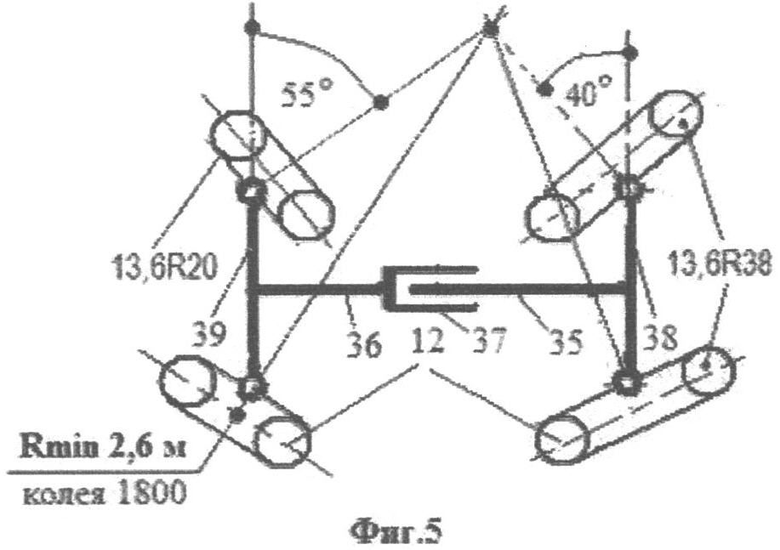
На фиг.5 - колесная схема трактора при минимальном радиусе поворота 2,6 м.
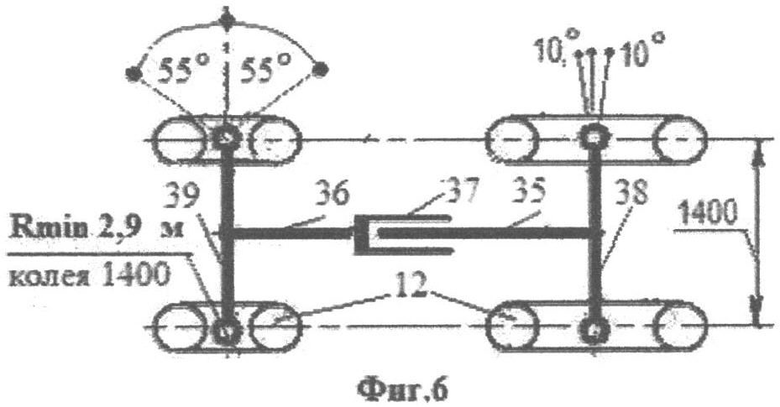
На фиг.6 - колесная схема трактора: колея 1400 мм для междурядий 700 мм и пахоты.
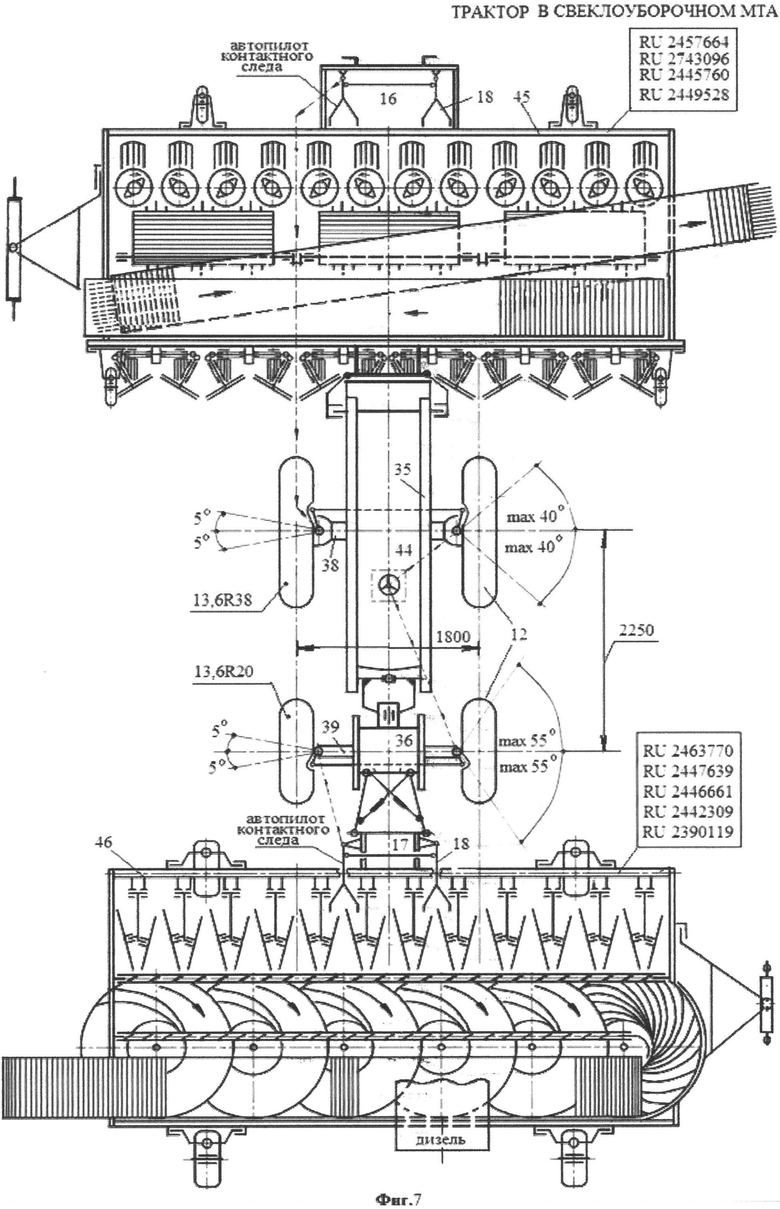
На фиг.7 - трактор в свеклоуборочном МТА с передней ботво- и задней корнеуборочными машинами и с автопилотом контактного следа на каждой из них для управления соответственно передними и задними колесами трактора.
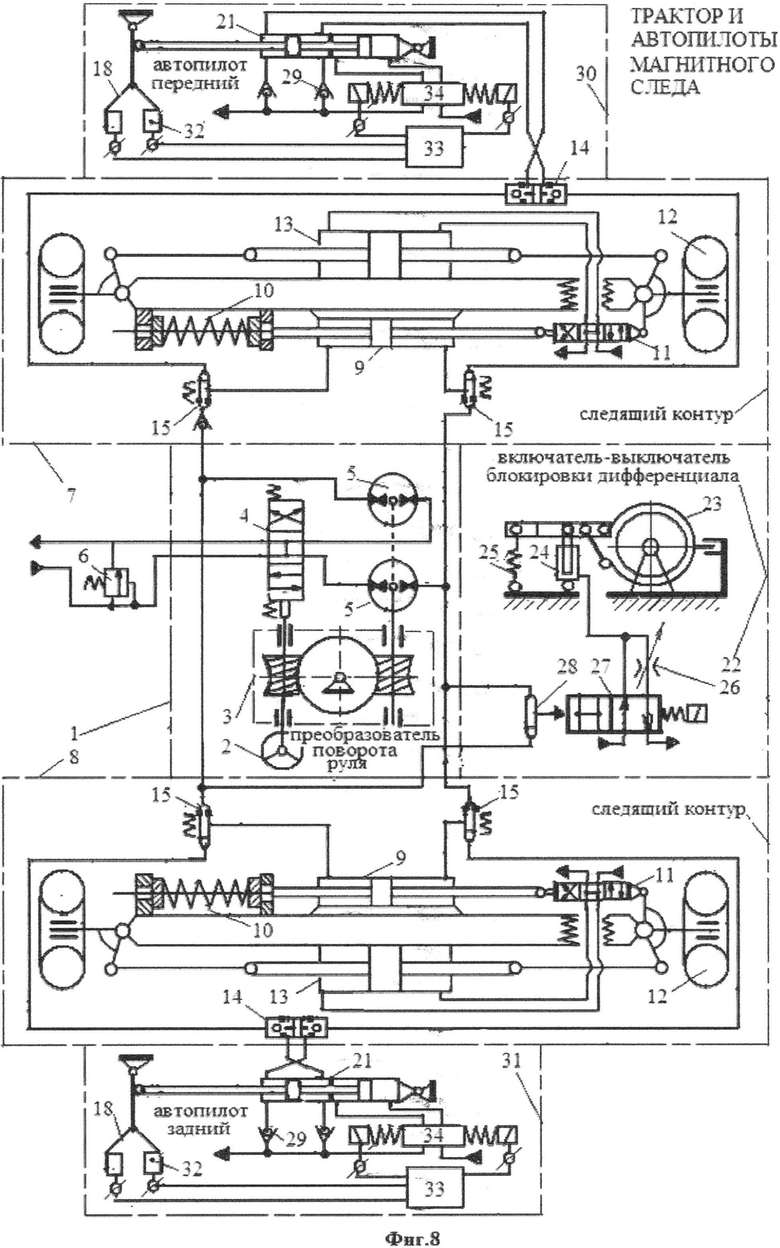
На фиг.8 - трактор по п.1 ф-лы с передним и задним автопилотами магнитного следа, управляющих соответственно передними и задними колесами трактора и включением-выключением блокировки дифференциала ведущего моста.
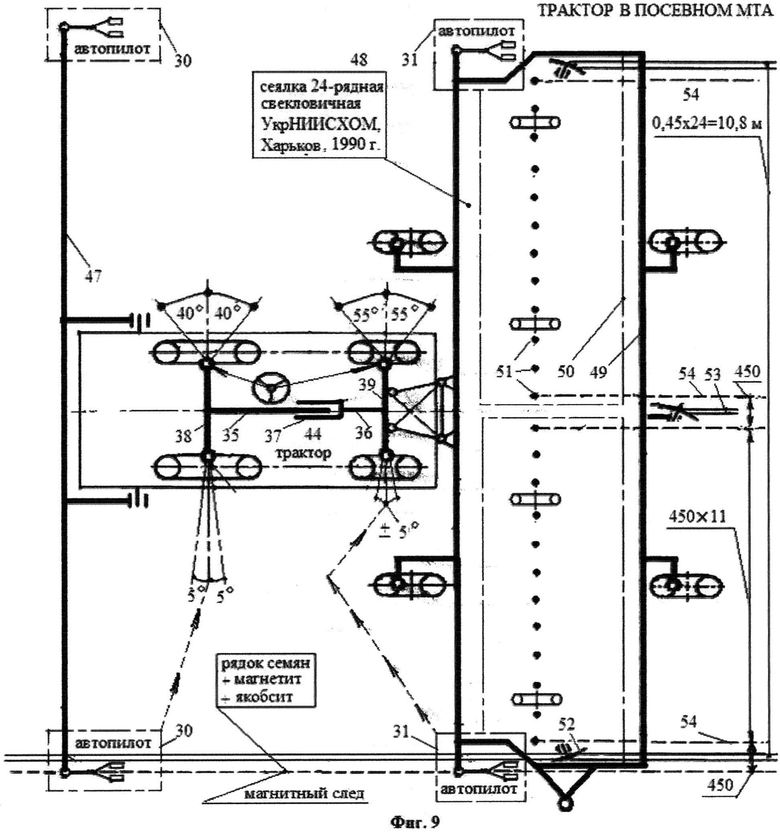
На фиг.9 - трактор в посевном МТА с 24-рядной полуприцепной свекловичной сеялкой (опытная, УкрНИИСХОМ, Харьков, 1990 г.) и автопилотами магнитного следа.
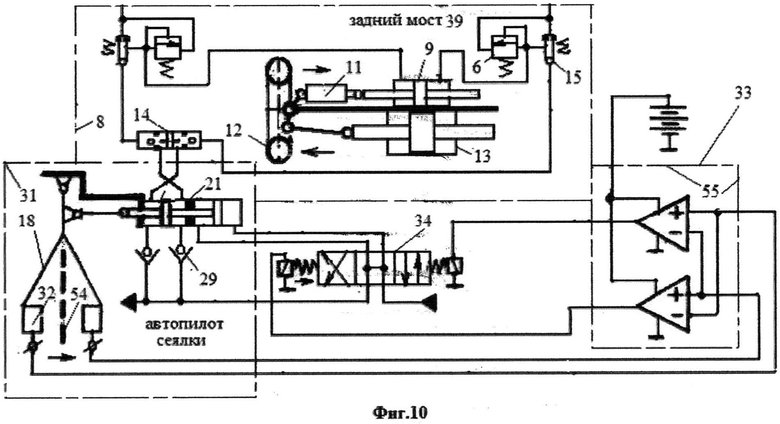
На фиг.10 - схема установленного на сеялке автопилота магнитного следа с датчиками отклонения от следа на полозках копир-водителя типа по SU 247674, но без лезвий.
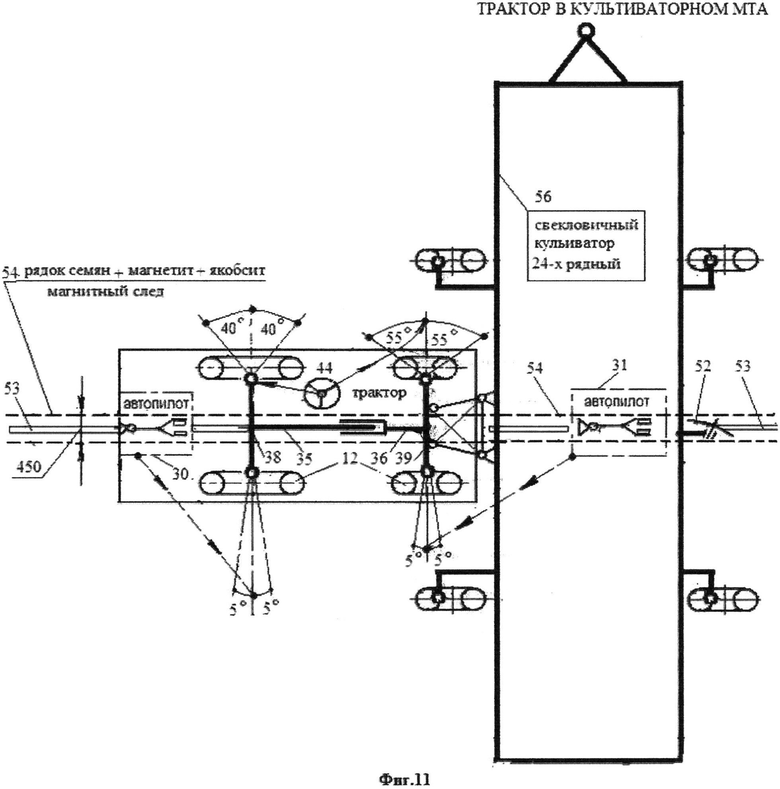
На фиг.11 - трактор в МТА с 24-рядным полуприцепным пропашным свекловичным культиватором и с автопилотами магнитного следа.
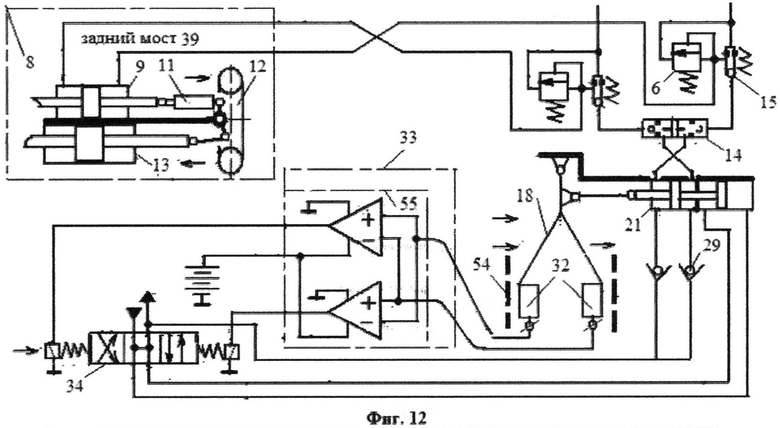
На фиг.12 - схема автопилота магнитного следа, установленного на культиваторе.
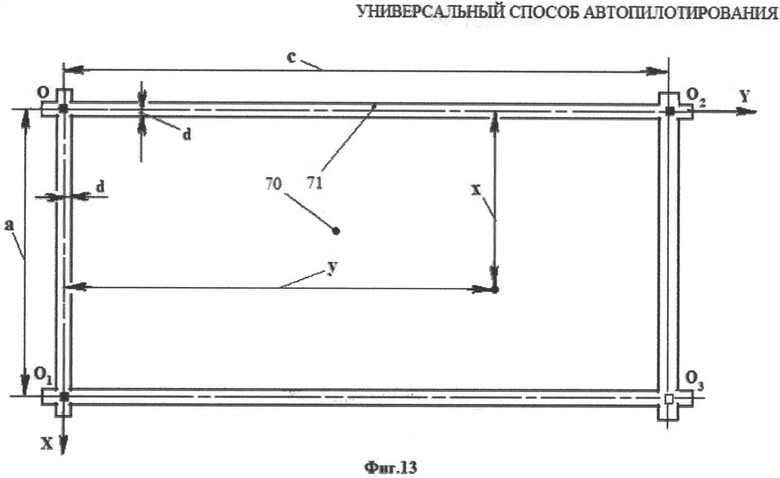
На фиг.13 - универсальный способ автопилотирования МТА: схема размещения неподвижных ориентиров, например, уголковых радио- светоотражателей.
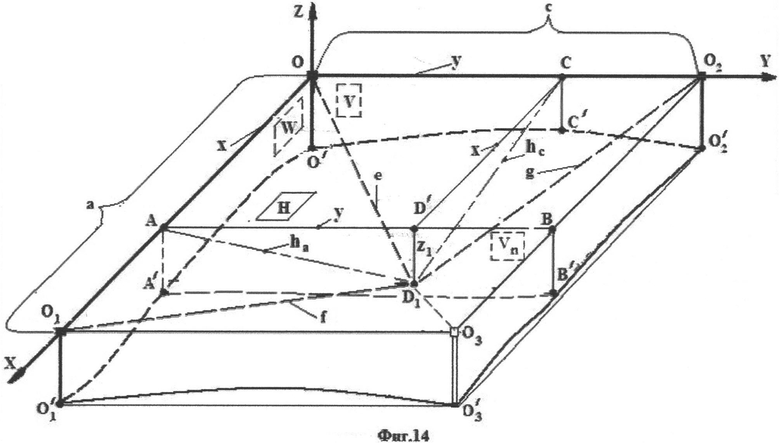
На фиг.14 - универсальный способ автопилотирования МТА: схема определения отклонения центра излучателя МТА от продольно-вертикальной плоскости рабочего гона.
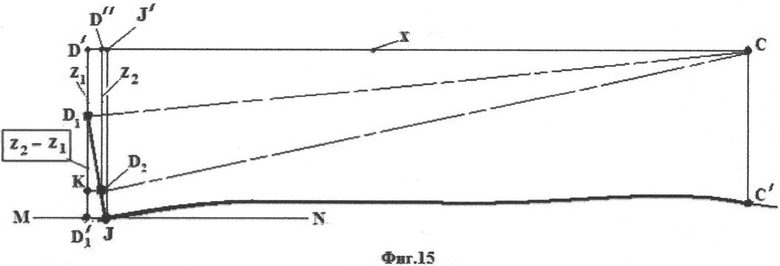
На фиг.15 - универсальный способ автопилотирования МТА: схема определения поправки на местный боковой уклон рельефа и поперечные колебания МТА.
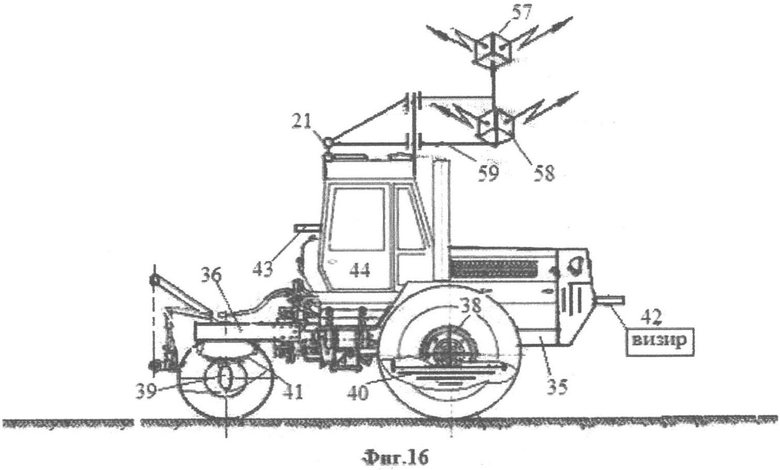
На фиг.16 - трактор с антеннами приемо-передатчика дальномерного автопилота.
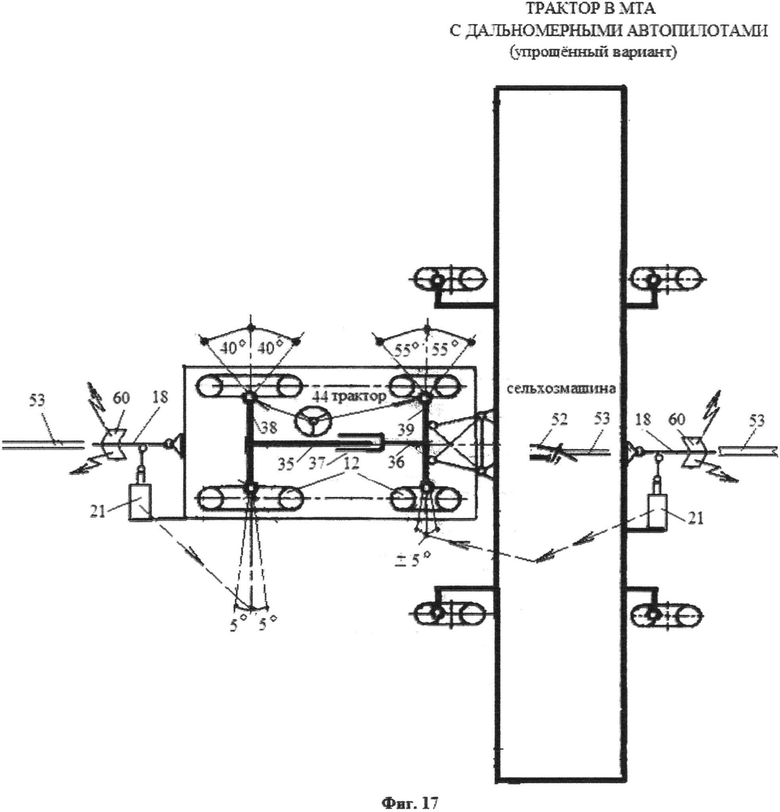
На фиг.17 - трактор в МТА с дальномерными автопилотами по местным ориентирам.
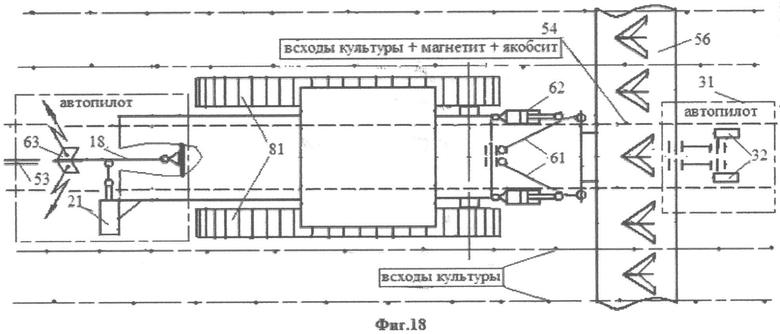
На фиг.18 - трактор в МТА с автопилотами: дальномерным, магнитного следа.
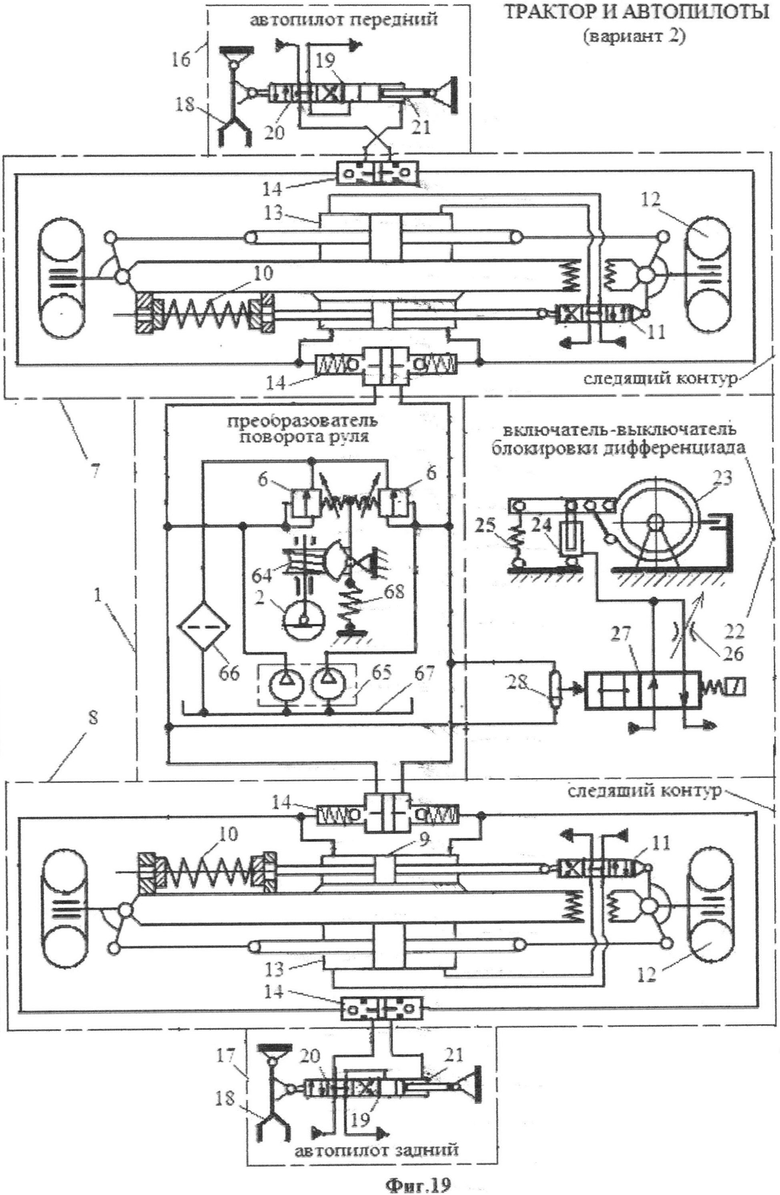
На фиг.19 - трактор по п.1 ф-лы с автопилотами (вариант 2).
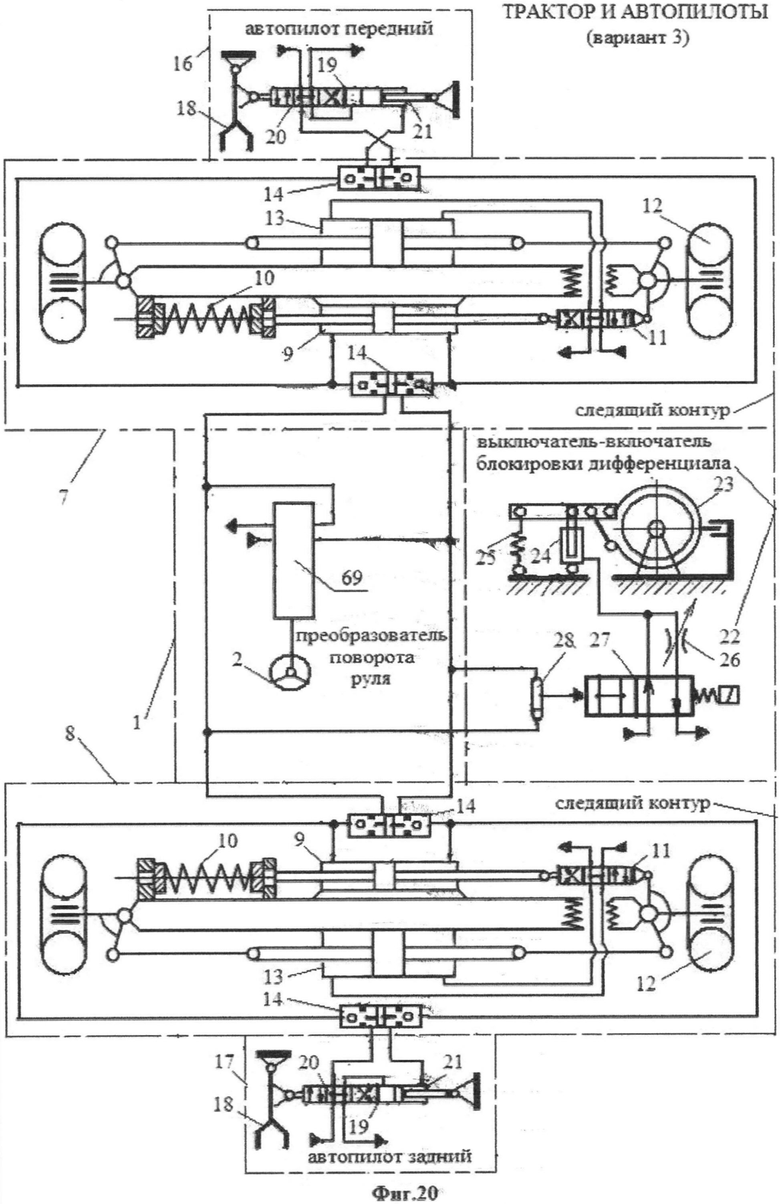
На фиг.20 - трактор по п.1 ф-лы с автопилотами (вариант 3).
Условные обозначения на фиг.1, 2, 8 и др. (маслопроводы - линии без номера):
1. Преобразователь поворота руля на входе в подачу дозы рабочей жидкости из его (преобразователя) выходных каналов по RU 2420421, фиг.1, (далее рулитель),
2. Рулителя 1 рулевое колесо (далее руль),
3. Рулителя 1 червячный редуктор с полным червячным колесом (далее редуктор),
4. Рулителя 1 гидрораспределитель с открытым центром (далее распределитель),
5. Рулителя 1 реверсивный и обратимый мотор-насос (далее мотор-насос),
6. Предохранительный клапан (далее клапан),
7. Следящий контур по RU 2464194 поворота передних управляемых колес, установленный на балке переднего моста трактора, (далее контур),
8. Следящий контур по RU 2464194 поворота задних управляемых колес, установленный на балке заднего моста трактора, (далее контур),
9. Контура 7 (8) сигнальный гидроцилиндр с парой штоков (далее цилиндр),
10. Контура 7 (8) центрирующая пороговая пружина (далее пружина),
11. Контура 7 (8) гидрораспределитель (далее распределитель),
12. Контура 7 (8) поворотное колесо (далее колесо),
13. Контура 7 (8) силовой гидроцилиндр поворота колес 12 (далее цилиндр),
14. Контура 7 (8) двусторонний гидрозамок (далее замок),
15. Контура 7 (8) клапан ИЛИ с пружиной и с дросселем, фиг.2 и др., (далее клапан),
16. Передний автопилот контактного следа - рядка корнеплодов, (далее автопилот),
17. Задний автопилот контактного следа - рядка корнеплодов, (далее автопилот),
18. Автопилота 16 (17) копир-водитель типа SU 743611 (далее копир-водитель),
19. Автопилота 16 (17) дозатор рабочей жидкости (далее дозатор),
20. Дозатора 19 гидрораспределитель (далее распределитель),
21. Дозатора 19 мотор-насос (далее мотор-насос),
22. Выключатель-включатель блокировки дифференциала по RU 2407933 ведущего моста трактора (далее переключатель),
23. Переключателя 22 ленточный тормоз (далее тормоз),
24. Переключателя 22 гидроцилиндр (далее цилиндр),
25. Переключателя 22 пружина (далее пружина),
26. Переключателя 22 регулируемый дроссель (далее дроссель),
27. Переключателя 22 с гидро- и электро- управлением гидрораспределитель выключения-включения тормоза 23 блокировки дифференциала (далее распределитель),
28. Переключателя 22 логический клапан ИЛИ (далее клапан),
29. Обратный клапан (далее клапан),
30. Передний автопилот магнитного следа в виде рядка семян с ферромагнитным минералом: магнетитом, якобситом или смеси этих минералов (далее автопилот),
31. Задний автопилот магнитного следа в виде рядка семян с ферромагнитным минералом: магнетитом, якобситом или смеси этих минералов (далее автопилот),
32. Расположенный на полозках копир-водителя 18 правый-левый датчик прибора измерения магнитного поля магнитного следа по [5] с.104…159, например типа детектора MINEX 2FD 4.500 фирмы Форпост Балтики Плюс [6], (далее магнитоприемник),
33. Электронный блок прибора измерения и сравнения магнитного поля магнитного следа правым и левым магнитоприемником 32, (далее электроусилитель),
34. Гидрораспределитель с электрическим управлением типа ЗСУ [7] с.165, рис.4.42, (далее распределитель).
Условные обозначения на фиг.3-12, 16-20:
35. Передняя полурама как у трактора ХТЗ-150К-12, Т-150К [8] с.195, рис.138, но с тягами равной длины вместо гидроцилиндров поворота полурам (далее полурама),
36. Задняя полурама, как у трактора ХТЗ-150К-12, Т-150К и также соединенная с рамой 35 продольно-горизонтальным шарниром, но укороченная, (далее полурама),
37. Продольно-горизонтальный шарнир соединения полурам 35 и 36 такой же, как у трактора ХТЗ-150К-12, трактора Т-150К [8] с.196, рис.139, (далее шарнир),
38. Передний ведущий мост управляемых колес типа переднего моста трактора ХТЗ-16331, ХТЗ-121 [9], с.249 рис.83а, с.251 рис.83в, но с управляемым дифференциалом по RU 2407933, с шарнирами Гука по RU 2431065, (далее мост),
39. Задний портальный мост управляемых колес типа моста трактора Т-40А [10], с.136, рис.51 на вкладке, но с управляемым дифференциалом ведущего моста по RU 2407933, с шарнирами Гука по RU 2431065, или по RU 2387890, (далее мост),
40. Рессора и амортизатор переднего моста такие же как рессора, амортизатор, съемный упор блокировки рессор трактора Т-150К [8] с.197 рис.140, с.198 рис.141, при этом рессора расположена под продольным брусом полурамы 35, (далее рессора),
41. Рессора с амортизаторами заднего моста, амортизатором и съемным упором блокировки рессор, (далее рессора),
42. Расположенный в продольно-вертикальной плоскости трактора передний лазерный визир типа ЛВ5М [11] с.170, 1-32 строки снизу (далее визир),
43. Расположенный в продольно-вертикальной плоскости трактора задний лазерный визир типа ЛВ5М [11] с.170, 1-32 строки снизу (далее визир),
44. Трактор по п.1 формулы изобретения, включая RU 2464194 и возможные модификации такого трактора с использованием RU 2385432, RU 2407933, RU 2418707, RU 2430851, RU 2432293, RU 2475667, RU 2488508 и др. (далее трактор),
45. Для уборки свекловичной ботвы способом по RU 2457664 ботвоуборочная машина по RU 2443096, RU 2445760, RU 2449528, RU 2438057 и с автопилотом 16, управляющим поворотом колес переднего моста 38 трактора 44, (далее машина),
46. Для уборки корнеплодов свеклы способом по RU 2463770 с использованием технологического полуприцепа по RU 2464766 корнеуборочная машина по RU 2447639, RU 2446661, RU 2442309, RU 2390119, с двигателем привода рабочих органов, и с автопилотом 17, управляющим поворотом колес заднего моста 39, (далее машина),
47. Машина полосового внесения гербицидов с правым и левым автопилотами 30 магнитного следа, управляющими поворотом колес переднего моста 38, (далее машина),
48. Для посева пропашной культуры, в частности, сахарной свеклы, 24-х рядная свекловичная сеялка с автопилотами 31 магнитного следа, с устройствами для внесения, по крайней мере в четыре рядка, ферромагнитных минералов: магнетита, якобсита или их смеси, а сыпучих удобрений во все рядки, (далее сеялка),
49. Полуприцепное шасси сеялки 48 на 4-х флюгерных колесах с отдельным для каждого колеса фиксатором выключения его самоустановки (далее шасси),
50. На двух копирующих колесах 12-ти рядная секция сеялки 48, соединенная с шасси 49 подвижно; подъем в транспортную позицию гидроцилиндрами; (далее секция),
51. Сошник высева семян, удобрений и ферромагнитных минералов (далее сошник),
52. Маркер и над ним лазерный визир типа ЛВ5М [11] с.170, установленный так, что луч касается маркерного следа в 20…40 м перед или за трактором, (далее маркер),
53. Маркерная бороздка (далее бороздка),
54. Рядок семян с внесенными в него ферромагнитными минералами (далее след),
55. В блоке 33 схема сравнения сигналов датчиков следа 54 (далее компаратор),
56. Культиватор свекловичный 24-х рядный на полуприцепном шасси 49 и с автопилотом 31 магнитного следа, (далее культиватор),
57. Кругового обзора верхняя антенна с фазированной решеткой (далее антенна),
58. Кругового обзора нижняя антенна с фазированной решеткой (далее антенна),
59. Дальномерный автопилот с рычагом, расположенным в продольно-вертикальной плоскости и с антеннами 57, 58 перед мостом 38 на плече рычага, причем его другое плечо соединено шарнирно с насос-мотором 21 дозатора автопилота поворота передних колес 12 моста 38 трактора 44, (далее автопилот дальномерный), фиг.16,
60. Автопилота антенна в продольно-вертикальной плоскости МТА на копир-водителе по SU 247674 у самой почвы и перед трактором, и сзади сельхозмашины, причем насос-мотор дозатора автопилота сообщен маслопроводами с цилиндром 9 контура 7 (8) поворота колес 12 моста 39 (38) трактора, (далее автопилот дальномерный), фиг.17,
61. Нижние тяги навесного устройства в позиции двухточечной наладки [8] с.219, рис.167, гусеничного трактора при возможных модификациях применением RU 2385249, RU 2392163, RU 2399540 (далее навеска), фиг.18,
62. Установленные между корпусом трактора и нижними тягами навески 61 два гидроцилиндра взаимного поворота трактора и сельхозмашины, например, культиватора 56, с автопилотом 31 магнитного следа, причем оба гидроцилиндра сообщены маслопроводами с мотор-насосом дозатора автопилота 31, (далее цилиндры), фиг.18,
63. Переднего автопилота антенна по оси симметрии МТА, установленная на копир-водителе по SU 247674 у самой почвы, причем насос-мотор дозатора автопилота сообщен маслопроводами с системой поворота трактора гусеницами (далее антенна), фиг.18,
64. Червячная передача (далее передача),
65. Двухсекционный насос типа НШ-10-10-2 [12] с.13 (далее насос),
66. Масляный фильтр (далее фильтр),
67. Емкость для масла (далее бак),
68. Центрирующая пружина (далее пружина),
69. Насос-дозатор гидравлического объемного рулевого управления (далее ГОРУ).
Условные обозначения на фиг.13, 14, 15:
70. Обрабатываемая площадь плантации сельскохозяйственной культуры, лучше прямоугольная, но не обязательно (далее плантация),
71. Вокруг плантации 70 необрабатываемые сельхозугодья, например, лесопосадки с прилегающими зонами (далее лесопосадка),
O, O1, O2, O3 - электрический центр ориентира (то есть уголкового свето- радио- отражателя, ведомой станции радиодальномера или др.), установленный на постоянной жесткой опоре на пересечении осей лесопосадок 76 и выше деревьев (в точке O3 - не обязательно), причем все в одной и той же горизонтальной плоскости, (далее точка),
OXYZ - прямоугольная система координат такая, что горизонтальная плоскость OXY совпадает с плоскостью точек O, O1, O2, (далее OXYZ),
OXY - горизонтальная плоскость проекций (далее плоскость H),
OYZ - фронтальная плоскость проекций (далее плоскость V),
OXZ - профильная плоскость проекций (далее плоскость W),
a - длина отрезка OO1, заносят в паспорт плантации, (далее размер a),
c - длина отрезка OO2, заносят в паспорт плантации, (далее размер c),
d - расстояние от границы плантации 75 до вертикальной плоскости под отрезком OO1, OO2, заносят в паспорт плантации, (далее размер d),
D1 - электрический центр верхнего излучателя МТА (далее точка D1),
D2 - электрический центр нижнего излучателя МТА (далее точка D2),
OD1 - расстояние, измеряемое бортовым дальномером, (размер e),
O1D1 - расстояние, измеряемое бортовым дальномером, (размер f),
O2D1 - расстояние, измеряемое бортовым дальномером, (размер g),
D′, D″ - проекция точки D1, D2 на плоскость H (далее точка),
Δ - символ, заменяющий слово треугольник, например, ΔD1OO2,
C - основание перпендикуляра D1C из точки D1 на отрезок OO2 (далее точка C),
ha - высота ΔD1OO1:  ,
,  [13] с.271 (далее ha),
[13] с.271 (далее ha),
hc - высота ΔD1OO2: 
O′, 



x - абсцисса точки (далее x),
y - ордината точки (далее y),
z - аппликата точки (далее z),
ABB′A′ - параллельная плоскости V продольно-вертикальная плоскость очередного рабочего гона на траектории движения МТА (далее плоскость Vn),
b - ширина рабочего захвата МТА (далее ширина b),
n=1, 2, 3 … - номер прохода МТА начиная с первого (далее 1-гон, 2-гон … n-гон),
MN - параллельная плоскостям W, H линия с точкой
K - прямоугольная вершина ΔKD1D2 (далее точка K),
J - след линии D1D2 на поверхности почвы (далее точка J),
J′ - проекция точки J на плоскость H (далее точка J′),

A′B′ - след плоскости Vn на поверхности почвы (далее след Vn),



JC′ - след плоскости 

Трактор содержит рулитель 1 первого варианта (фиг.1, 8), включающий руль 2, связанный кинематически с редуктором 3 и через вал его червяка с распределителем 4, а также с мотор-насосом 5. Взаимно подобные контуры 7 и 8 включают по цилиндру 9, сообщенному гидравлически маслопроводами с выходными каналами рулителя 1. Первый шток цилиндра 9 связан с пружиной 10 на резьбовом стержне, состыкованным со штоком сваркой. Пружина 10 сжата гайками на величину порогового усилия, причем в контуре 8 пороговое усилие пружины 10 больше, чем в контуре 7. Резьбовой стержень проходит сквозь отверстия упоров, прикрепленных к балке моста так, что гайки находятся между упорами и касаются их. Второй шток цилиндра 9 через распределитель 11 связан с колесами 12, причем управляющие каналы этого распределителя сообщены с двухштоковым гидроцилиндром 13. В другом варианте цилиндры 9 и 13 имеют по одному штоку, а резьбовой стержень с поджатой гайками пружиной 10 находится между штоком цилиндра 9 и распределителем 11. Один из управляющих каналов распределителя 4 сообщен на выходе рулителя 1 с потребителями рабочей жидкости (далее масло) через мотор-насос 5 типа МНШ-46У [12] с.20. Маслопроводами управляющие каналы распределителя 4 сообщены на выходе рулителя 1 параллельно и с контурами 7, 8 поворота колес 12, и с переключателем 22 включения-выключения блокировки дифференциала ведущего моста. В уборочном МТА полости цилиндра 9 контура 7 (8) сообщены маслопроводами еще и с насос-мотором 21 дозатора 19 автопилота 16 (17) контактного следа (фиг.1, 3, 7). В посевном, культиваторном МТА полости цилиндра 9 контура 7 (8) сообщены маслопроводами еще и с насос-мотором 21 дозатора автопилота 30 (31) магнитного следа (фиг.8-12, 18) или с насос-мотором 21 дозатора автопилота 59 (автопилота 60) дальномерного (фиг.16, 17, 18). При этом параметры насос-дозаторов такие, что по их сигналам максимально возможный угол поворота колес 12 не превышает 5° (как у машины КС-6Б), что уточняют экспериментально.
Во втором варианте рулитель 1 трактора выполнен по RU 2488508, фиг.19.
В третьем варианте рулитель 1 выполнен в виде штатного гидравлического объемного рулевого управления трактора ХТЗ-150К-12, фиг.20. Трактор с рулителем 1 первого варианта предназначен для движения без ограничения скорости. Трактор с рулителем 1 второго и третьего вариантов предназначен для движения не более 50 км/ч.
Колея колес 12 трактора регулируемая перестановкой подобно перестановке колес трактора Т-40 [10] с.134, 135, рис.50, но всего на два размера: 1800 мм (фиг.4, 5) для междурядий 450 мм, 600 мм, 900 мм и 1400 мм (фиг.6) для междурядий 700 мм и работы с плугом. На колее 1800 мм минимальный радиус поворота 2,6 м (вычисления, фиг.5). Привод моста 38 такой как в тракторе ХТЗ-150К-12, Т-150К [8] с.92, рис.70, а заднего 39 от раздаточной коробки [8] с.108, 109, рис.78, но с шестерней на добавочном валу, расположенном ниже шестерни привода переднего моста (рис.78, поз.46). При этом упомянутые шестерни находятся в постоянном зацеплении, а добавочный вал соединен с задним ведущим мостом через муфту по RU 2476738, совмещенную с обгонной муфтой по RU 2442040, и через карданный вал с шарнирами по RU 2387890. В ином варианте мост 39 не приводной. К фланцу вала 39 [8] с.108, рис.78, присоединен карданный вал синхронного привода нестандартного ВОМ, предназначенного для прицепов с активной осью. Привод заднего, переднего вала отбора мощности (далее ВОМ) гидравлический регулируемый типа ГСТ-112-1, ОАО «Гидросила» (Кироваград) [14] с.91…95.
С соосными шипами пару кронштейнов рамы широкозахватной сельхозмашины (фиг.7, 9, 11, 17, 18) для работы на плантации присоединяют к трактору по оси подвеса нижних тяг навесного устройства [8] с.219, рис.167, с.220, рис.168, зафиксированных от поперечных смещений ограничительными цепями с винтовыми стяжками так, что вертикально-продольные плоскости симметрии трактора и ширины захвата машины совпадают. Все широкозахватные сельхозмашины оснащают устройством подъема их в транспортную позицию на их же копирующих колесах, но типа флюгерных и с фиксаторами; а также боковой прицепной сницей для дальнего транспорта, фиг.7, 9, 11, 17, 18, и позиция 49. Поэтому тяги и гидроцилиндр навесного устройства трактора выполнены уменьшенными, а шины трактора и почву плантации под ними на разворотах в конце рабочих гонов нагружают весом только собственно трактора.
В автопилотах 30, 31 используют известные способы обнаружения ферромагнитных тел [5] с.104…156, определения расстояния до них с погрешностью не более 3…5% на удалении от 100 мм и менее [4] с.70 строки 2 и 1 снизу, с.71 строки 11, 12, и 17, 18. Например, для расстояния от магнитоприемника 32 до магнитного следа в пределах 5 см погрешность определения расстояния не превышает 2,5 мм.
Работу свеклоуборочного МТА в составе трактора по п.1 ф-лы, а также передней ботвоуборочной и задней корнеуборочной машин выполняют, например, со сбором и силосованием ботвы по RU 2457664, погрузкой убираемых корней свеклы в прицеп по RU 2463771 или по RU 2464766 и выгрузкой в поперечные кагаты по RU 2463770, с погрузкой корней из кагатов в магистральный транспорт по RU 2471334. На рабочем гоне автопилотом 16 поворачивают передние колеса 12, автопилотом 17 поворачивают задние колеса 12 трактора до 5°, направляя ботвосрезающие аппараты машины 45 и копачи машины 46 по рядкам сахарной свеклы. Одновременно с началом поворота колес 12 автоматически выключают блокировку дифференциалов ведущих мостов 38, 39 выключением тормоза 23 распределителем 27. По окончании сигнала автопилота 16, 17 колеса 12 распределителем 11 автоматически возвращают в позицию прямолинейного движения, выжимая пружиной 10 масло из соответствующей полости цилиндра 9 через клапан 15 и открытый центр распределителя 4, а дифференциалы автоматически блокируют. На рабочем гоне за руль 2 руками лучше не держаться, чтобы случайными поворотами руля не искажать работу автопилотов 16, 17, так как сигналы (дозы масла) от вращения руля 2 и от поворота копир-водителя 18 суммируют с учетом знака (подобно машине КС-6Б), причем автопилотом колеса 2 возможно повернуть только до 5°. В конце рабочего гона машины 45, 46 поднимают на их же флюгерных копирующих колесах. При этом копир-водители 18 автопилотов 16, 17 попадают в фиксаторы, которыми удерживают копир-водители неподвижно. Далее по мере вращения руля 2 поворачивают вначале только передние, а затем и передние, и задние колеса 12 для движения по крутой траектории разворота с одновременном автоматическим выключением блокировки дифференциала до возвращения колес 12 в позицию прямолинейного движения.
Работу посевного МТА по магнитному следу выполняют, например, так.
Пусть поле подготовлено под сев сахарной свеклы в соответствии с рекомендациями [15] с.10…86. Около кромки поля машину 47 и сеялку 48 присоединяют соответственно впереди и сзади к трактору 44 (фиг.9) симметрично его продольно-вертикальной плоскости. Правый и левый боковые автопилоты 30 и 31 машин 47, 48 сообщают маслопроводами соответственно с цилиндром 9 (фиг.8) контура 7 и цилиндром 9 контура 8. Проверяют расположение среднего маркера 52 точно по оси среднего междурядья сеялки, боковых маркеров 52 и визиров ЛВ5М точно по оси стыковых междурядий. Загружают емкости машин гербицидами, семенами, твердыми удобрениями штатно, а магнетитом и/или якобситом только те емкости, из которых минералы вносят через сошники 51 в четыре рядка 54 совместно с семенами: по одному боковому и в два средних. Включают ход, подъезжают к самой кромке поля и фиксаторами выключают самоустановку флюгерных колес шасси 49. Затем опускают машины в рабочую позицию и выполняют первый проход не прикасаясь к рулю 2 первые 100 м. Так как дифференциалы и флюгерные колеса заблокированы, то первые 100 м проходят достаточно прямолинейно. Далее в зеркале заднего вида наблюдают совмещение с маркерным по оси сеялки следом 53 луча лазерного излучения из визира 43 посевного МТА. При необходимости небольшим поворотом руля 2 корректируют движение МТА так, что совмещают лазерный луч со следом 53. В конце первого прохода фиксаторы флюгерных колес выключают до конца работы на этом поле. Затем переводят машины 47, 48 в позицию ближнего транспорта и совершают разворот, пусть влево, как это описано выше для уборочного МТА. Разворотом посевной МТА направляют так, что лазерный луч визира над левым маркером сеялки располагают над маркерным следом предыдущего прохода от левого маркера 52. Этим левые автопилоты 30 и 31 располагают над рядком семян с магнетитом и/или якобситом, то есть над магнитным следом 54. Переводят машины 47, 48 в рабочую позицию и включают ход. При этом копир-водители 18 левых автопилотов 30 и 31 схемой сравнения 55, распределителем 34, мотор-дозатором 21 (фиг.9, 10) удерживают по оси следа 54 с прецизионной точностью, так как они и колеса 12 мало инерционны по сравнению с МТА. Поэтому автопилотом 30 отклоняют передние колеса 12, а автопилотом 31 задние колеса 12 трактора 44 с необходимой продолжительностью для вписания МТА в траекторию магнитного следа. На следующих челночных проходах визуально контролируют точность движения МТА по совпадению лазерных лучей визиров с маркерными следами: боковым и по оси среднего междурядья. При необходимости корректировать движение МТА тракторист чуть поворачивая руль 2 в соответствующую сторону.
Работу культиваторного МТА (фиг.11, 12) по магнитному следу выполняют движением копир-водителей 18 автопилотов 30 и 31 между парой магнитных следов - средних рядков 54 ширины захвата МТА. Заезд в рядки в начале гона и контроль точности вождения выполняют визуальным наблюдением совмещения лазерных лучей визиров 42 (фиг.3) с маркерной линией в продольно-вертикальной плоскости МТА перед и за трактором. При этом ширину защитной зоны рядка (между дисками культиватора) уменьшают до 40…50 мм от рекомендуемых 140 мм [15] с.144, а между лапами от 200 мм [14] с.149, рис.50. Этим уничтожают максимум сорняков. На последующих обработках защитную зону рядка уменьшают, а скорость МТА увеличивают от рекомендуемых [15]. Разворотом в конце гона луч визира 42 совмещают с бороздкой 53 нового гона.
Работу при универсальном способе автопилотирования МТА по местным ориентирам, например, при междурядной культивации всходов сахарной свеклы, выполняют следующим образом. Вводят культиваторный МТА в рядки так, что лазерный луч визира 42 располагают над бороздкой 53. Автоматически измеряют и вводят в память автопилота виртуальные (то есть не подлинные, а показанные дальномерами для текущего состояния атмосферы и подстилающей поверхности, следовательно имеющие некоторую погрешность) расстояния: e, f, g до неподвижных ориентиров на местности, вводят в память автопилота паспортные данные плантации: a, c, d и ширину b захвата культиватора, как аргументы для вычислений (автоматически по штатной программе) отклонений МТА от продольно-вертикальной плоскости рабочего гона на текущем и последующих проходах. Для этого вычисляют абсциссу x (фиг.14) в начале первого прохода и вводят ее в память вычислительного устройства, а далее с ней сравнивают текущее значение абсциссы x и вычисляют отклонение между ними. Алгоритм вычислений абсциссы x сводится к решению треугольников, изображенных на фиг.14: к вычислению высоты ha, hc соответствующего треугольника по трем его сторонам и далее к вычислению третьей стороны прямоугольных треугольников по двум известным. Соответственно вычисленному отклонению вырабатывают сигнал, который подают на вход системы вождения трактора. Вначале каждого следующего прохода автоматически учитывают смещение МТА на ширину b и далее сравнивают с ней текущее значение абсциссы x. Соответственно вычисленному на текущем рабочем гоне отклонению вырабатывают сигнал, который подают на вход системы вождения трактора.
Так как на протяжении суток параметры атмосферы и подстилающей поверхности (поверхность плантации 70) изменяются, то изменяются погрешности измерений и результатов вычислений. В результате появляется статическое смещение МТА вбок от продольно-вертикальной плоскости текущего прохода. Это обнаруживают визуально по смещению лазерного луча визира 42 от оси бороздки 53. Если это смещение существенно, то вначале очередного прохода, например, нажатием клавиши Enter, автоматически запускают такие же действия, как в начале работы.
В другом варианте у точки O3 устанавливают на штативе неподвижный дальномер, измеряют им расстояние O3O в начале работы и далее. На протяжении работы МТА состояние атмосферы и подстилающей поверхности переменчиво, то переменчивы и показания этого неподвижного дальномера. Вычисляют удельную (на единицу длины линии O3O) погрешность по сравнению с началом работы и периодически по радиоканалу вводят корректирующую поправку в показатели бортовых дальномеров. Этим обеспечивают достаточную точность вождения МТА на рабочем гоне без вмешательства тракториста на протяжении всей работы на плантации.
В упрощенном варианте по углам плантации устанавливают четыре ориентира. Антенны 60, 63 (фиг.17, 18) выполняют с такой диаграммой направленности, что передним автопилотом измеряют расстояния до передних по ходу ориентиров, а задним - до задних. Алгоритм вычислений абсциссы x сводится к решению треугольников, изображенных на фиг.14. Так как антенна 60, 63 установлена на копир-водителе 18 вблизи поверхности почвы, то поперечный уклон рельефа и поперечные угловые колебания трактора не влияют на точность и соответствующую поправку не вычисляют.
Если в качестве местных ориентиров используют ведомые станции радиодальномеров, то неподвижные опоры для них располагают с учетом дальности действия, пусть в углах квадрата (30×30) км для дальномера типа «Теллурометр MRA-4» (ЮАР) [16] с.173, таблица 7.1, дальность действия до 50 км=50·105 см. Точность см: (0,3+S×3·10-6), где S длина измеряемой линии, то есть точность измерений 0,3 см и еще плюс 0,3 см на каждый километр измеряемой длины S. В таком случае четыре опоры с ведомыми станциями радиодальномеров располагают вокруг группы плантаций. При этом измеряют сравнительно короткие расстояния по показаниям дальномеров при текущем состоянии атмосферы и подстилающей поверхности, причем без определения абсолютных координат, что проще и надежней, чем в глобальной системе ориентации.
В перспективе этим обеспечивают условия для автопилотирования МТА на плантации и, например, на транспортировке силосной массы от кормоуборочного комбайна до места силосования у фермы по внутрихозяйственным путям на скоростях более 50 км/ч трактором, например по ф-ле RU 2389615, с прицепом. При этом трактор оснащают рулителем 1 первого варианта (фиг.1), дальномерными автопилотами, а также обзорно-информационной системой [4] с.67, 68, рис.3.11, и/или системой технического зрения [4] с.81…120, в сочетании с искусственным интеллектом [4] с.246…249.
Итак, техническим результатом изобретения является трактор точного хода и способ автопилотирования по местным ориентирам преимущественно без электронных приборов вне МТА, без ограничения скорости движения, без картографирования плантации и вычисления абсолютных координат в отличие от DGPS+RTK. Причем точность движения наблюдают прямо на плантации по лазерному лучу, а не косвенно на дисплее, как в DGPS.
Источники информации
1. Справочник по эксплуатации свеклоуборочных комплексов. A.M. Мазуренко и др. К.: Урожай, 1984. - 128 с.
2. Сельхозтехника 90. Экспонаты СССР. Внешторгиздат. Изд. №8198 АВ.
3. Новое сельское хозяйство. Ж. №3, 2005 г.
4. Системы очувствления и адаптивные промышленные роботы. Под ред. чл. корр-та АН СССР Е.П. Попова, д. т. н. В.В. Клюева. М.: Машиностроение, 1985. - 255 с.
5. С.А. Спектор. Электрические измерения физических величин. Методы измерений. Л.: Энергоатомиздат, 1987. - 320 с.
6. WWW.fpblus.ru/services_1. ОАО «Форпост Балтики Плюс», Россия, Калининград, ул. Генерала Озорова, д.17Б, тел/факс: (4012) 99 10 87.
7. Васильченко В.А. Гидравлическое оборудование мобильных машин: Справочник - М. Машиностроение, 1983. - 320 с.
8. Трактор Т-150К. Под ред. Б.П. Кашубы, И.А. Коваля. М.: Колос, 1976. - 301 с.
9. Тракторы ХТЗ-120, ХТЗ-121. Инструкция по эксплуатации. Харьков, 1994. - 311 с.
10. Тракторы Т40 и Т40А. Инструкция по уходу и эксплуатации. Липецк, 1968. - 226 с.
11. Спиридонов А.И. и др. Справочник-каталог геодезических приборов. М.: Недра, 1984. - 238 с.
12. Гидравлическое оборудование тракторов, сельскохозяйственных и дорожностроительных машин. Трактороэкспорт. Внешторгиздат. Изд. №334136. 1988. - 53 с.
13. М.Я. Выгодский. Справочник по математике. Изд. физ-мат-лит. М.: 1958. - 412 с.
14. Каталог «Гидравлические агрегаты тракторов и сельскохозяйственных машин». Часть 1. М.: ЦНИИТЭИавтосельхозмаш. - 1989, 137 с.
15. Операционная технология возделывания сахарной свеклы / Глуховский B.C. и др. К.: Урожай, 1988. - 240 с.
16. Свето- и радиодальномеры. Костецкая Я.М. - Львов: Вища школа. Изд-во при Львовском университете, 1986. - 264 с.
17. SU 247674. SU 743611, SU 1607710, SU 1672949, SU 1685283, SU 1781652, SU 1793833, SU 1817958, SU 2021655, SU 2025924.
18. Патенты изобретений Чернякова Ю.Ф., на которые имеются ссылки в описании: RU 2385249, RU 2385432, RU 2387890, RU 2389615, RU 2390119, RU 2392163, RU 2399540, RU 2407933, RU 2418707, RU 2420421, RU 2430851, RU 2431065, RU 2432293, RU 2438057 RU 2442040, RU 2442309, RU 2443090, RU 2445760, RU 2446661, RU 2447639, RU 2449528, RU 2457664 RU 2463770, RU 2463771, RU 2464194, RU 2464766, RU 2471334, RU 2475667, RU 2475667, RU 2476738, RU 2488508.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА БАЛКИ МОСТА И ПОЛУРАМ ТРАКТОРА | 2014 |
|
RU2555875C1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАКТОРОМ ПОВОРОТОМ ПОЛУРАМ | 2014 |
|
RU2547966C1 |
| ТРАКТОР-УНИВЕРСАЛ С ШАРНИРНО СОЕДИНЁННЫМИ ПОЛУРАМАМИ | 2014 |
|
RU2576847C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| СПОСОБ ВОЖДЕНИЯ ПРОПАШНОГО АГРЕГАТА И ТРАКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404561C1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА КОЛЁС И ПОЛУРАМ ТРАКТОРА | 2015 |
|
RU2590762C2 |
| СПОСОБ ПОВОРОТА ДВИЖИТЕЛЯМИ И УСТРОЙСТВО РУЛЕВОЕ ТРАКТОРА | 2010 |
|
RU2430851C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ МОСТОВ САМОХОДНОЙ МАШИНЫ | 2011 |
|
RU2464194C1 |
Изобретение относится к транспортным средствам с автоматическим вождением. Трактор точного хода содержит передние и задние поворотные колеса, управляемые передним и задним автопилотами по контактному или магнитному следу на рабочем гоне или/и автопилотами с бортовыми дальномерами до неподвижных ориентиров на местности. В способе автопилотирования по следу в рядок семян при посеве вносят ферромагнитный минерал, которым создают магнитный след. Далее определяют отклонение от следа измерением его магнитного поля и полученный сигнал вводят на вход системы вождения трактора. В универсальном способе автопилотирования бортовыми дальномерами измеряют расстояния до неподвижных ориентиров на местности и вычисляют отклонение на поверхности почвы следа продольно-вертикальной плоскости параллельных рабочих гонов. По отклонению вырабатывают сигнал и подают его на вход системы вождения трактора.
Достигается упрощение системы пилотирования транспортного средства. 4 н.з. и 1 з.п. ф-лы, 20 ил.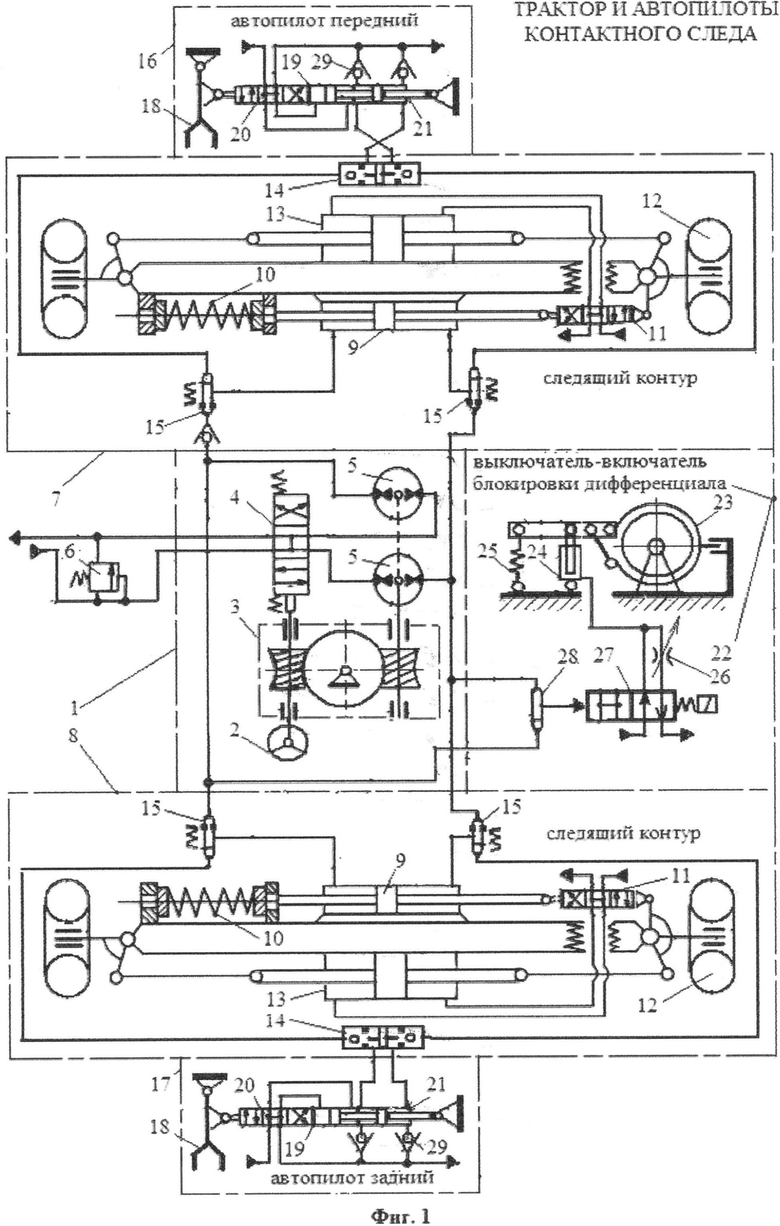
1. Трактор точного хода, содержащий преобразователь поворота руля на входе в подачу дозы рабочей жидкости из его выходных каналов и следящий контур поворота колес каждого моста управляемых колес, включающий сообщенный гидравлически с преобразователем поворота руля сигнальный гидроцилиндр, шток которого связан с центрирующей пороговой пружиной и через гидрораспределитель с поворотными колесами, причем управляющие каналы этого гидрораспределителя сообщены с силовым гидроцилиндром поворота колес, отличающийся тем, что полости сигнального гидроцилиндра сообщены гидравлически еще и с насос-мотором дозатора автопилота.
2. Трактор по п.1, отличающийся тем, что линия гидравлического управления выключением блокировки дифференциала сообщена с выходными каналами преобразователя поворота руля через клапан или с возможностью автоматического выключения блокировки дифференциала одновременно с началом поворота колес.
3. Способ автопилотирования машинно-тракторного агрегата по местным ориентирам, включающий автопилотирование на рабочем гоне по следу, отличающийся тем, что в почву вносят ферромагнитный минерал, которым создают магнитный след, определяют отклонение машины агрегата от следа измерением его магнитного поля и полученный сигнал вводят на вход системы вождения трактора.
4. Универсальный способ автопилотирования машинно-тракторного агрегата по местным ориентирам, включающий автопилотирование на рабочем гоне, отличающийся тем, что бортовыми дальномерами агрегата измеряют расстояния до неподвижных ориентиров на местности, причем по измеренным расстояниям вычисляют отклонение машинно-тракторного агрегата от следа продольно-вертикальной плоскости на поверхности почвы параллельных рабочих гонов и соответственно отклонению вырабатывают сигнал, который подают на вход системы вождения трактора.
5. Способ визуального контроля точности вождения машинно-тракторного агрегата, включающий нанесение маркерного следа на поверхность почвы, отличающийся тем, что наблюдают совмещение с маркерным следом луча лазерного излучения из машинно-тракторного агрегата.
| Устройство для автоматического управления сельхозмашиной по рядкам или междурядьям стеблевых культур | 1957 |
|
SU112185A1 |
| Способ вождения трактора вдоль горизонталей местности с применением прибора нивелирометра | 1957 |
|
SU113258A1 |
| Способ вождения сельскохозяйственного агрегата | 1990 |
|
SU1750453A1 |
| СИСТЕМА ОРИЕНТИРОВ ДЛЯ АВТОВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 1991 |
|
RU2021655C1 |
| US 4528804 A, 16.07.1985 | |||

