Уровень техники
Изобретение относится к литографической системе для записи шаблона на подвижной мишени, например пластине, и системе хранения для хранения данных, содержащих измеренное положение мишени в системе. Изобретение также относится к способу хранения таких позиционных данных.
Заявка на патент США № 2011/0029685 описывает способ и систему, в которых данные, записывающие работу устройства экспозиции, выводятся через канал связи на устройство обработки информации, содержащее блок хранения для хранения упомянутых данных, и блок связи для передачи данных, запрашиваемых одним или более терминалов, на упомянутый один или более терминалов. Эти данные, записывающие работу устройства экспозиции, могут содержать информацию, измеренную измерительной системой координатного стола пластины для использования системой управления координатным столом пластины для управления положением пластины, и могут храниться в течение недель или дней, чтобы запрашиваться в более позднее время через один из терминалов для дополнительного анализа.
В аналогичных системах, блок хранения образует часть контура управления посредством обратной связи, причем контур управления посредством обратной связи содержит один или более датчиков для регистрации положения мишени в устройстве экспозиции, причем упомянутые зарегистрированные положения сохраняются в блоке хранения, привод для перемещения упомянутой мишени в устройстве экспозиции, и блок управления для управления приводом для перемещения мишени в устройстве экспозиции на основании измеренных положений, хранящихся в упомянутом блоке хранения.
Недостаток этих известных систем состоит в том, что блок хранения, для того, чтобы он был способен действовать в соответствии с поступлением данных, должен быть способен обрабатывать данные по меньшей мере с той же скоростью, что и измерительная система координатного стола пластины. Это чрезмерно дорого, когда объем позиционных данных, подлежащих записи, очень велик, особенно, когда данные сохраняются в и считываются из системы хранения по существу одновременно.
Задачей настоящего изобретения является обеспечение литографической системы и способа, обеспечивающих более экономичный метод хранения позиционных данных мишени.
Раскрытие изобретения
Согласно первому аспекту настоящее изобретение предусматривает литографическую систему для записи шаблона на мишень с использованием одного или более экспозиционных пучков, причем упомянутая система содержит систему управления посредством обратной связи, содержащую привод для перемещения мишени в литографической системе, измерительную систему для по существу непрерывного измерения положения мишени относительно литографической системы, и блок управления, выполненный с возможностью управления приводом на основании положения, измеренного измерительной системой, причем упомянутая система управления посредством обратной связи имеет первую задержку, заданную как максимальная задержка между упомянутым измерением и упомянутым управлением привода на основании упомянутого измерения, систему хранения для хранения измеренных положений, причем упомянутая система хранения содержит приемный буфер и блок хранения, причем упомянутая система хранения имеет вторую задержку, заданную как средняя задержка между приемом измеренных положений в приемном буфере и сохранением упомянутых измеренных положений в блоке хранения, причем первая задержка по меньшей мере на порядок величины меньше второй задержки, причем система управления посредством обратной связи содержит однонаправленное соединение для передачи упомянутых измеренных положений на систему хранения.
Поскольку блок хранения системы хранения может иметь относительно высокую задержку, можно использовать относительно дешевый блок хранения. Блок хранения может, например, содержать массив жестких дисков или ленточных накопителей, вместо более дорогостоящей транзисторной или твердотельной памяти. Кроме того, в случае задержки или отказа системы хранения, работа системы управления посредством обратной связи не подвергается влиянию, поскольку информация перемещается только из системы управления посредством обратной связи на систему хранения, но не в обратном направлении.
Согласно варианту осуществления система управления посредством обратной связи выполнена с возможностью по существу непрерывной работы независимо от системы хранения. Таким образом, даже в случае переполнения, отказа или замены системы хранения, литографическую систему можно продолжать использовать для шаблонирования мишеней. Даже когда хранилище измеренных положений и/или других данных в любое время работает медленнее, чем задержка системы управления посредством обратной связи, система управления посредством обратной связи, таким образом, не подвергается влиянию, и, следовательно, позиционирование мишени в литографии остается неизменным.
Согласно варианту осуществления, из системы хранения в систему управления посредством обратной связи не отправляется никаких данных и сигналов. Поскольку система управления посредством обратной связи, таким образом, действует полностью независимо от системы хранения, никакая ошибка или задержка при сохранении данных в системе хранения не влияет на позиционирование мишени в литографической системе посредством привода и блока управления.
Согласно варианту осуществления, система хранения является внешней по отношению к упомянутой системе управления посредством обратной связи. Система хранения, таким образом, обеспечивает долговременное хранение данных из системы управления посредством обратной связи, без формирования части упомянутой системы управления посредством обратной связи.
Согласно варианту осуществления, однонаправленное соединение содержит сетевое соединение, облегчающее соединение между системой хранения и системой позиционирования, измерительной системой литографической системы и/или другими модулями литографической системы, например, сетевыми устройствами для связи с системой управления посредством обратной связи.
Для облегчения физического соединения модулей, соединение предпочтительно содержит оптоволоконный кабель Ethernet. Данные могут передаваться на высоких скоростях через такие кабели без формирования электрических полей в литографической системе. В качестве альтернативы, можно использовать кабели неэкранированных витых пар (UTP), экранированных витых пар (STP) или фольгированных витых пар (FTP).
Согласно варианту осуществления, система дополнительно содержит сетевой коммутатор, имеющий множество входов и по меньшей мере один выход, причем по меньшей мере один из упомянутых входов соединен однонаправленным соединением с системой управления посредством обратной связи, и при этом упомянутый выход соединен с приемным буфером. Такую же систему хранения можно, таким образом, использовать для хранения данных из нескольких входов. Помимо данных из системы управления посредством обратной связи, содержащих позиционные данные, измеренные измерительным блоком, и/или данные управления, формируемые блоком управления для управления приводом, данные от других модулей литографической системы могут поступать на другие входы коммутатора для долговременного хранения системой хранения. Предпочтительно, каждый модуль литографической системы соединен с сетевым коммутатором с использованием отдельного однонаправленного соединения.
Согласно варианту осуществления, однонаправленное соединение содержит соединение от измерительной системы к коммутатору и/или соединение от системы управления посредством обратной связи к коммутатору. Например, система управления посредством обратной связи может обеспечивать два однонаправленных соединения к двум разным входам коммутатора, одно такое соединение от измерительного блока к коммутатору для передачи измеренных положений на систему хранения, и другое такое соединение от блока управления к коммутатору для передачи данных управления, формируемых блоком управления, для управления приводом, на систему хранения. Альтернативно, поскольку блок управления принимает измеренные положения от измерительного блока, однонаправленное соединение может содержать единичное соединение от блока управления на систему хранения для передачи измеренного положения и данных управления, формируемых блоком управления, для управления приводом, на систему хранения.
Согласно варианту осуществления, сумма максимальных скоростей передачи данных упомянутого множества входов меньше максимальной скорости передачи данных по меньшей мере одного выхода. Например, когда коммутатор имеет два входа каждый из которых имеет скорость передачи данных, самое большее, n байт/с, то выход коммутатора должен иметь скорость передачи данных по меньшей мере 2×n байт/с. Предпочтительно, максимальная скорость передачи данных выхода по меньшей мере в 5 раз больше суммы скоростей передачи данных входов для снижения вероятности перегрузки на коммутаторе. Поскольку, в этом варианте осуществления, объединенная скорость передачи данных входов всегда меньше доступной скорости передачи данных по меньшей мере одного выхода, все данные, поступающие на коммутатор, также будут выводиться из коммутатора, и никакой потери данных не будет происходить в коммутаторе.
Согласно варианту осуществления первая задержка составляет, самое большее, 200 микросекунд, и вторая задержка составляет по меньшей мере 2000 микросекунд.
Согласно варианту осуществления положения, измеренные измерительной системой, содержат положения по меньшей мере в двух измерениях. Это позволяет точно расположить мишень под проекционной оптикой. Когда поверхность мишени является по существу плоской, эти два отдельных направления предпочтительно параллельны упомянутой плоскости и предпочтительно ортогональны друг другу.
Согласно варианту осуществления, система выполнена с возможностью использования протокола пользовательских дейтаграмм по однонаправленному соединению. Этот протокол особенно пригоден для передачи данных без квитирования их получения. Поскольку система управления посредством обратной связи только передает и не принимает данные по однонаправленному соединению, работа системы управления посредством обратной связи не подвергается влиянию работы системы хранения.
Согласно варианту осуществления, система хранения выполнена с возможностью хранения измеренных положений в течение по меньшей мере всего промежутка времени, необходимого для обработки мишени от начала до конца. В ходе обработки от начала до конца мишень обычно обрабатывается несколькими отдельными модулями помимо литографии согласно изобретению, например, модулями для покрытия мишени резистом, для экспонирования мишени экспозиционным пучкам, для проявки экспонированного резиста, для обследования мишени и/или для травления мишени. Для облегчения физического соединения модулей, соединение предпочтительно содержит кабели неэкранированных витых пар (UTP), экранированных витых пар (STP), фольгированных витых пар (FTP) или оптических волокон Ethernet.
Промежуток времени для обработки мишени от начала до конца определяется как время между началом обработки мишени в литографической системе, и временем, после которого мишень является полностью обработанной и более никакой обработки мишени не происходит. Таким образом, в любое время в ходе обработки мишени, доступна информация о предыдущих этапах обработки. Причину дефектов в мишени, которые выявляются только ближе к окончанию обработки мишени, можно, таким образом, определить задним числом из данных для упомянутой мишени, хранящихся в системе хранения. На практике, время между началом обработки мишени и окончанием обработки мишени может составлять по меньшей мере два месяца, и в течение этого времени мишень можно повторно обработать в той же литографической системе, например для экспонирования разных слоев мишени.
Согласно варианту осуществления, положения измеряются с частотой дискретизации 5 кГц или более, причем каждая выборка, предпочтительно, содержит по меньшей мере 512 байт данных.
Согласно варианту осуществления, считывание данных из системы хранения не влияет на работу системы управления посредством обратной связи, даже когда данные передаются из приемного буфера системы хранения на блок хранения.
Согласно варианту осуществления приемный буфер выполнен с возможностью удаления данных из системы управления посредством обратной связи, когда приемный буфер полон.
Согласно варианту осуществления, приемный буфер содержит буфер ″последним вошел, первым вышел″ или ″первым вошел, первым вышел″ или циклический буфер, в котором данные, дольше всех присутствующие в буфере, перезаписываются при поступлении новых данных. Предпочтительно, когда приемный буфер полон, и новые данные поступают в буфер, новые данные сохраняются таким образом, что старые данные перемежаются с новыми данными. Таким образом, хотя некоторые данные могут теряться до сохранения их в системе хранения, данные, которые сохраняются, будут относиться к данным, записанным более равномерно по времени. Например, когда приемный буфер полон и измерения d1, d2, d3, d4 положения находятся в буфере, новые измерения d5 и d6 будут заменять измерения d1 и d3 соответственно.
Согласно варианту осуществления, приемный буфер содержит твердотельную память, способную принимать данные, содержащие измерения положений, из системы управления посредством обратной связи по меньшей мере со скоростью, с которой данные передаются из системы управления посредством обратной связи в приемный буфер.
Согласно варианту осуществления, приемный буфер имеет первую емкость хранилища, и блок хранения имеет вторую емкость хранилища, причем вторая емкость хранилища по меньшей мере на три порядка величины больше первой емкости хранилища, предпочтительно по меньшей мере на 5 порядков величины.
Согласно варианту осуществления, система управления посредством обратной связи дополнительно выполнена с возможностью передачи на систему хранения через однонаправленное соединение, одного или более из данных управления, метки времени, порядкового номера, данных, представляющих внутреннее состояние блока управления, и настройки хронирования блока управления.
Согласно варианту осуществления, система хранения выполнена с возможностью приема упомянутых данных не по порядку. На основании информации, например, порядкового номера или метки времени, данные могут затем обрабатываться в последовательном порядке.
Согласно варианту осуществления, литографическая система содержит оптическую колонну для записи шаблона на мишень с использованием одного или более экспозиционных пучков, причем упомянутая оптическая колонна содержит фокусирующую матрицу для фокусировки упомянутого одного или более экспонированного пучка на мишень.
Согласно варианту осуществления, упомянутая измерительная система содержит интерферометр.
Согласно варианту осуществления, литографическая система выполнена с возможностью записи упомянутого шаблона, в то время как упомянутая мишень перемещается в упомянутой литографической системе. В таких системах, площадь мишени, которая освещается экспозиционными пучками в любой момент времени, существенно меньше полной площади поверхности экспозиции мишени. Таким образом, экспозиция всей поверхности мишени занимает сравнительно много времени, и точное позиционирование мишени в ходе экспозиции особенно важно. Поэтому система хранения должна быть способна сохранять очень большие объемы данных, формируемых в системе управления посредством обратной связи в ходе экспозиции мишени.
Согласно варианту осуществления, упомянутые один или более экспозиционных пучков содержат множество пучков заряженных частиц. Такие пучки используются для записи признаков шаблона нанометрового масштаба, поэтому точное позиционирование особенно важно.
Согласно второму аспекту, настоящее изобретение предусматривает способ хранения позиционных данных мишени, перемещаемой в литографической системе, причем упомянутый способ содержит этапы, на которых:
по существу непрерывно измеряют положение мишени в литографической системе,
по существу непрерывно управляют перемещением мишени для коррекции отклонения между измеренным положением и желаемым положением мишени, причем первая задержка задается как максимальная задержка между упомянутым измерением и упомянутым управлением привода на основании упомянутого измерения,
сохраняют упомянутое измеренное положение в системе хранения, причем вторая задержка задается как средняя задержка между приемом измеренных положений в приемном буфере и сохранением упомянутых измеренных положений в блоке хранения,
причем первая задержка по меньшей мере на порядок величины меньше второй задержки,
причем система управления посредством обратной связи содержит однонаправленное соединение для передачи упомянутых измеренных положений на систему хранения.
Предпочтительно, литографическая система, используемая в способе, представляет собой литографическую систему согласно настоящему изобретению.
Согласно варианту осуществления, упомянутое управление осуществляется независимо от упомянутого сохранения.
Согласно варианту осуществления, упомянутые измеренные положения сохраняются в течение по меньшей мере всего промежутка времени, необходимого для обработки мишени от начала до конца.
Различные аспекты и признаки, описанные и показанные в описании изобретения, можно применять, по отдельности, когда возможно. Эти отдельные аспекты, в частности, аспекты и признаки, описанные в зависимых пунктах нижеследующей формулы изобретения, могут составлять предмет выделенных патентных заявок.
Краткое описание чертежей
Изобретение поясняется на основании иллюстративного варианта осуществления, показанного на прилагаемых чертежах, в которых:
фиг. 1 - первый вариант осуществления литографической системы согласно изобретению,
фиг. 2 - подробная схема системы управления посредством обратной связи и системы хранения второго варианта осуществления литографической системы согласно изобретению.
Фиг. 3 - подробная схема системы управления посредством обратной связи и системы хранения третьего варианта осуществления литографической системы согласно изобретению,
фиг. 4 - схема разных этапов и модулей обработки для обработки мишени в литографической системе согласно изобретению.
Осуществление изобретения
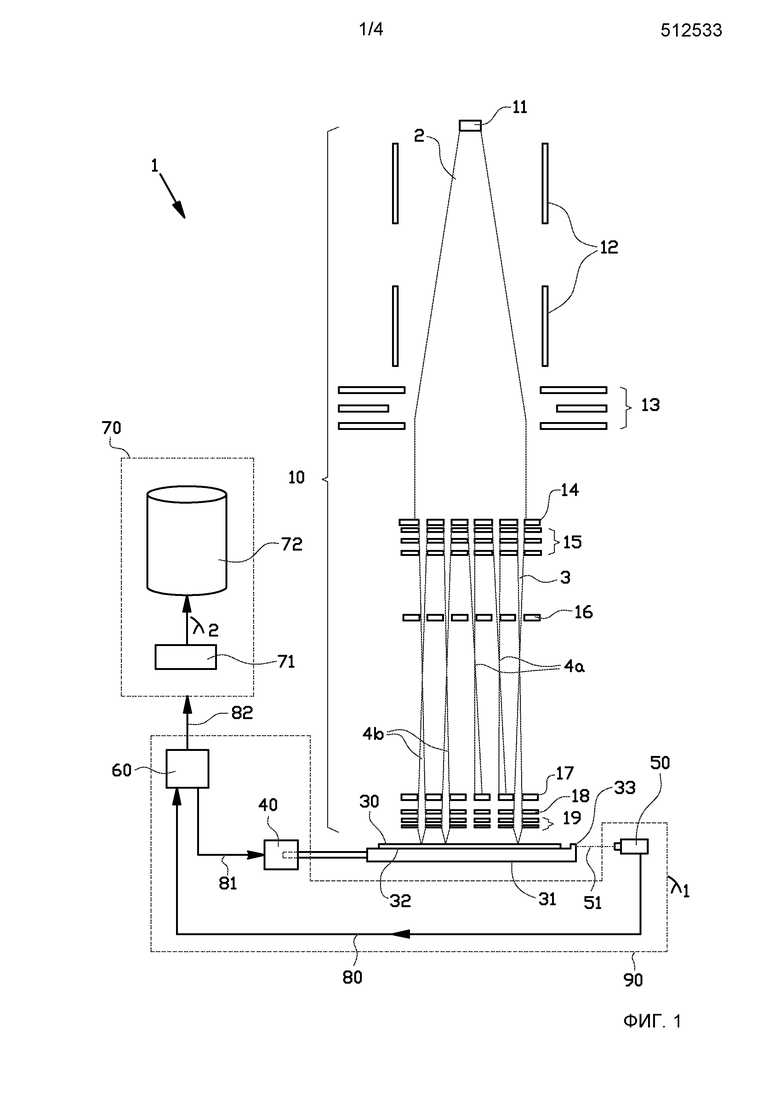
Вариант осуществления литографической системы согласно изобретению показан на фиг. 1. Литографическая система 1 содержит оптическую колонну 10, содержащую источник 11 пучка заряженных частиц, который испускает пучок 2 заряженных частиц. Пучок 2 заряженных частиц проходит через двойной восьмиполюсник 12 и коллимационную линзу 13, прежде чем упасть на матрицу 14 апертур. Матрица 14 апертур делит пучок 2 заряженных частиц на множество пучков 3 заряженных частиц, которые конденсируются конденсорной матрицей 15. На матрице 16 диафрагмирования пучка некоторые из этих отдельных пучков диафрагмируются, т.е. пучки 4a должны отклоняться так, чтобы встретиться с матрицей 17 блокировки пучка ниже на своих траекториях вместо того, чтобы пройти через апертуры в матрице 17 блокировки пучка. Затем пучки 4b, которые не были диафрагмированы, проходят через дефлекторный блок 18, который выполнен с возможностью обеспечения сканирующего отклонения упомянутых пучков в направлениях X и Y. В конце своих траекторий пучки 4b проходят через линзовую матрицу 19, выполненную с возможностью фокусировки упомянутых пучков на поверхность мишени 30, поддерживаемой держателем 31 мишени. Держатель 31 мишени содержит по существу плоскую поверхность 32 для поддержки мишени 30 и приподнятый край 33 по существу на одном уровне с мишенью 30 и содержащий отражающий материал. Привод 40 выполнен с возможностью перемещения держателя 31 мишени и мишени 30 на нем в направлении X и/или Y относительно оптической колонны 10 согласно сигналу управления от блока 60 управления. В ходе шаблонирования мишени 30, держатель 31 мишени и мишень 30 перемещаются приводом 40 под оптической колонной 10, таким образом, что недиафрагмированные пучки 4b могут механически сканироваться в разные положения на мишени. Измерительная система 50 по существу непрерывно измеряет положение мишени 30 в литографической системе 1, предпочтительно, относительно оптической колонны 10. Согласно показанному варианту осуществления, измерительная система 50 содержит интерферометр 50, который испускает измерительный пучок 51 на отражающую поверхность 33 держателя 31 мишени и измеряет его отражение для определения положения мишени 30 в литографической системе 1. Измеренное положение передается через однонаправленное соединение 80 на блок 60 управления, который обновляет сигнал управления, подаваемый на привод, на основании разности между желаемым положением мишени 30 в литографической системе 1 и измеренным положением. Обновленный сигнал управления отправляется на привод 40 через однонаправленное соединение 81.
Привод 40, интерферометр 50 и блок 60 управления совместно образуют систему 90 управления посредством обратной связи, которая по существу непрерывно измеряет и обновляет положение мишени 30 в литографической системе 1. Максимальная задержка λ1 в системе 90 управления посредством обратной связи между измерением положения измерительной системой 50 и отправкой обновленного сигнала управления на привод 40 согласно показанному варианту осуществления, составляет, самое большее, 200 мс, и частота, с которого положения измеряются, или выбираются, измерительной системой 50, составляет по меньшей мере порядка от 5 до 10 кГц. Обычно, каждое измерение положения содержит по меньшей мере 512 байт данных, так что каждую секунду формируется по меньшей мере 2,56 МБ данных положения.
Помимо управления приводом 40, блок 60 управления также передает измеренные положения и/или обработанные измеренные положения на приемный буфер 71 системы 70 хранения, через однонаправленное соединение 82. Чтобы гарантировать, что система 90 управления посредством обратной связи сможет продолжать работу без перерыва, гарантируется, что ни данные, ни сигналы не отправляются из системы 70 хранения на систему 90 управления посредством обратной связи за счет обеспечения только однонаправленного соединения между ними.
Приемный буфер 71 имеет по меньшей мере достаточную емкость для хранения множества измерений, например, для хранения всех данных измерения положения, полученных в течение периода 20 мс. Согласно показанному варианту осуществления, приемный буфер 70 способен принимать данные с той же скоростью или более высокой скоростью, чем скорость, с которой данные положения измеряются измерительной системой 50. Когда приемный буфер 71 полон, больше не принимает данные из системы 90 управления посредством обратной связи, и любые данные, передаваемые из системы 90 управления посредством обратной связи в приемный буфер 50, отбрасываются.
Система хранения дополнительно содержит блок 72 хранения достаточной емкости для хранения данных положения, измеренных в течение по меньшей мере всего промежутка времени, необходимого для обработки пластины или партии пластин от начала до конца с использованием литографической системы. Необходимую емкость C хранилища можно вычислить как C=T×R, где T - время в секундах, необходимое для обработки пластины или партии пластин от начала до конца, и R - объем данных, формируемых каждую секунду измерительной системой. Например, когда время, необходимое для обработки пластины от начала до конца, равно 60 дней (т.е. 5184000 секунд), и объем измеренных данных положения, формируемых каждую секунду, равен 2,56 МБ, необходимая емкость равна 5184000 секунд × 2,56 МБ/с = 13271040 МБ=13,27104 ТБ. Средняя задержка λ2 системы 70 хранения между приемом данных положения в приемном буфере 71 и сохранением упомянутых данных в блоке 72 хранения по меньшей мере на порядок величины больше максимальной задержки λ1 контура 90 управления посредством обратной связи. Приемный буфер 71 содержит сравнительно малую память с низкой задержкой, и блок 72 хранения содержит сравнительно большую, но менее дорогую память с более высокой средней задержкой.
На Фиг. 2 схематически показана подробная схема системы 170 хранения и системы 190 управления посредством обратной связи для использования в другом варианте осуществления литографической системы 101 согласно изобретению. Литографическая система 101 выполнена с возможностью шаблонирования мишени 130 с использованием одного или множества световых пучков, проецируемых из оптической колонны 102 на мишень 130, причем упомянутый шаблон может формироваться с использованием сетки или маски, или с использованием модулятора световых пучков для модуляции множества световых пучков. Система 190 управления посредством обратной связи содержит систему 110 позиционирования пластины, содержащую привод 140, выполненный с возможностью перемещения мишени, т.е. пластины, в литографической системе, в частности, параллельно плоскости мишени, экспонируемой литографической системой. Система 190 управления посредством обратной связи дополнительно содержит измерительную систему 150, выполненную с возможностью по существу непрерывного измерения положения мишени в литографической системе. Система 110 позиционирования пластины также содержит блок 160 управления, выполненный с возможностью управления приводом 140 на основании измеренного положения. Контур 191 указывает обмен информацией между измерительной системой 150 и системой 110 позиционирования пластины; положения мишени, измеренные измерительной системой, возвращаются в систему 160 позиционирования пластины, которая, в свою очередь, адаптирует положение мишени в системе на основании измерения. Система 190 управления посредством обратной связи действует в так называемых ограничениях в реальном времени. Это означает, что для того, чтобы система управления посредством обратной связи работала, должны выполняться условия, что блок 160 управления системы позиционирования пластины 110 принимает каждое измерение положения из измерительной системы 140 в заранее определенные фиксированные моменты времени, плюс-минус заранее определенный допуск, и что этот блок 160 управления обеспечивает привод 140 сигналами управления на этом основании в заранее определенные фиксированные моменты времени, плюс-минус заранее определенный допуск. Если любое из этих условий не выполняется, позиционирование мишени считается неудачным. Например, когда измерение положения в ходе экспозиции мишени принимается системой 160 управления позже, чем требуется, то система управления не сможет управлять приводом 140 вовремя для коррекции любых ошибок в положении мишени, и мишень будет освещаться экспозиционным пучком в неправильном положении. В то время как система 190 управления посредством обратной связи должна работать в строгих ограничениях в реальном времени, система 170 хранения может работать без таких ограничений или по меньшей мере значительно менее строгих ограничений в реальном времени.
Измерительная система 150 соединена первым однонаправленным соединением 180 с первым входом коммутатора 173 системы 170 хранения. Система 110 позиционирования пластины соединена вторым однонаправленным соединением 182 со вторым входом коммутатора 173. Оба однонаправленных соединения 180, 182 являются сетевыми соединениями, содержащими оптоволоконные кабели Ethernet. Данные отправляются по этим соединениям из системы 110 позиционирования пластины и измерительной системы 150 на коммутатор 173 с использованием протокола пользовательских дейтаграмм (UDP), хотя, альтернативно, можно использовать другие протоколы передачи, пригодные для односторонней связи. Первый и второй входы коммутатора 173, которые соединены с однонаправленными соединениями 180, 182, соответственно, имеют максимальную скорость передачи данных 100 МБ/с. Коммутатор содержит выход, соединенный с соединением 174 от коммутатора к приемному буферу 171, имеющему максимальную скорость передачи данных 1 ГБ/с, так что пропускная способность коммутатора 173 не ограничивается скоростью передачи данных на его выходе. Положения измеряются и корректируются с частотой 5 кГц, и задержка λ1 контура управления посредством обратной связи составляет меньше 200 микросекунд, тогда как средняя задержка λ2 между приемом данных в приемном буфере 171 и сохранением данных в блоке 172 хранения составляет 2100 микросекунд.
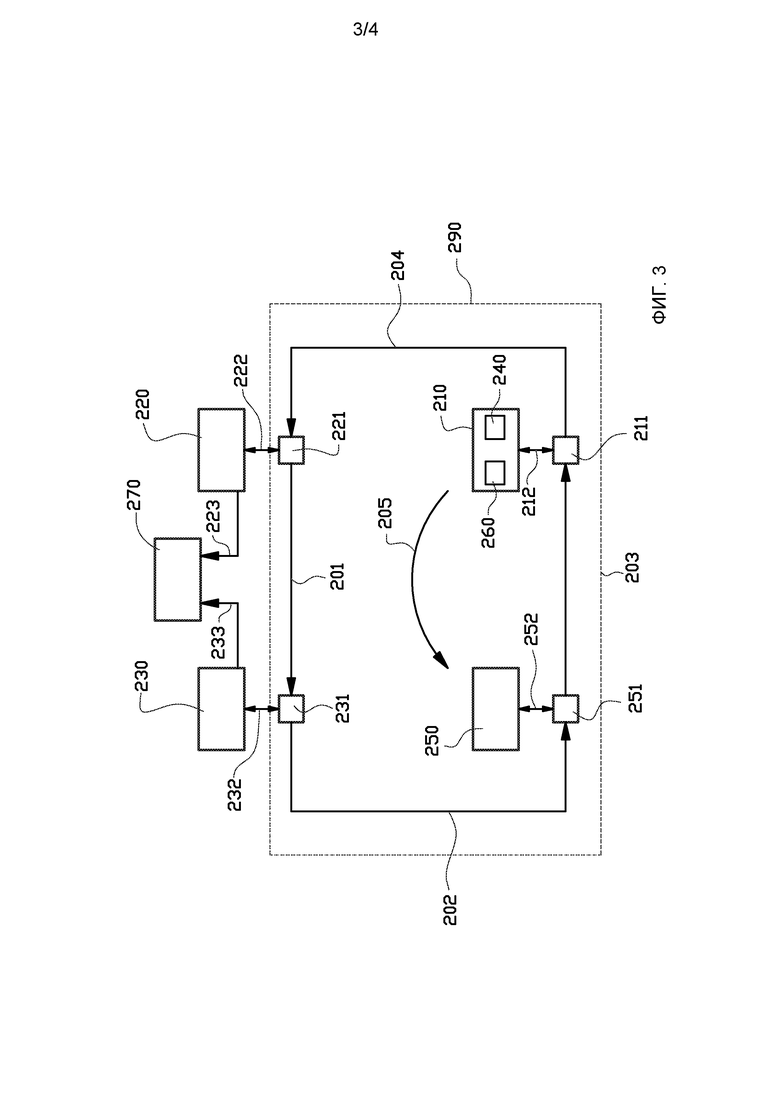
На Фиг. 3 схематически показана подробная схема другого варианта осуществления литографической системы согласно изобретению, содержащей систему 270 хранения, систему 290 управления посредством обратной связи, компьютер 230 измерения и компьютер 220 позиционирования пластины. Система 290 управления посредством обратной связи содержит измерительную систему 250, выполненную с возможностью измерения положения пластины в системе, и систему 210 позиционирования пластины, выполненную с возможностью позиционирования пластины в литографической системе. Система 290 управления посредством обратной связи дополнительно содержит сеть, образованную сетевыми устройствами 251, 211, 221 и 231 и однонаправленными соединениями 201, 202, 203 и 204. Сетевые устройства 251, 211, 221, 231 соединяют измерительную систему 250, систему 210 позиционирования пластины, компьютер 220 управления позиционированием и компьютер 230 управления измерением, соответственно, с сетью через двунаправленные соединения 252, 212, 222 и 232. Компьютер 230 измерения выполнен с возможностью отправки основных данных управления на измерительный блок, например для инициирования его калибровки. Компьютер 220 позиционирования пластины своевременно обеспечивает данные, относящиеся к желаемым положениям для мишени для системы 210 позиционирования пластины. Блок 260 управления управляет приводом для коррекции отклонений между желаемым положением и измеренным положением в любое время.
Соединения 201, 202, 203, 204 содержат оптоволоконные кабели Ethernet. Данные, отправленные с любого из сетевых устройств через соединения 201, 202, 203, 204, передаются по сети, пока не достигнут сетевого устройства, с которого данные были отправлены. Таким образом, данные положения, измеренные измерительной системой 250, отправляются с сетевого устройства 251 на сетевые устройства 211, 221 и 231 соответственно, благодаря чему, все сетевые устройства в сети принимают одинаковую информацию. Стрелка 205 указывает, что информация об изменении фактического положения мишени, обусловленном управлением привода, доступна измерительной системе 250 при измерении физического положения мишени. Другими словами, измерительная система 250 не опирается на однонаправленные сетевые соединения 201, 202, 203 или 204 для получения измерения положения мишени в литографической системе.
Каждое сетевое устройство 211, 221, 231, 251 сохраняет локальную копию данных, передаваемых ему, в локальной памяти прежде чем отправить данные в следующий пункт назначения в сети. Любые данные, передаваемые по однонаправленным соединениям 201, 202, 203, 204 можно, таким образом, считывать извне контура 290 управления посредством обратной связи путем считывания этих данных из локальных блоков памяти сетевого устройства 231 или сетевого устройства 221, и считывание данных из любого из сетевых устройств 221 и 231 не изменяет задержку в системе 290 управления посредством обратной связи между измерением положения и отправкой сигнала управления на привод 240 на основании упомянутого измеренного положения.
Система 270 хранения, которая содержит описанные здесь приемный буфер и блок хранения, соединена однонаправленными соединениями 233 и 223 с компьютером 230 измерения и компьютером 220 управления пластиной, соответственно, так что никакие сбои в работе или задержка в работе системы 270 хранения не влияет на систему 290 управления подачей, компьютер 230 измерения или компьютер 220 позиционирования пластины. Средняя задержка между приемом данных в приемном буфере системы 270 хранения и сохранением данных в блоке хранения системы 270 хранения на три порядка величины больше задержки системы 290 управления посредством обратной связи между измерением положения мишени и отправкой сигнала управления на привод на основании упомянутого измеренного положения.
Система 290 управления посредством обратной связи действует согласно строгим требованиям в реальном времени, тогда как по меньшей мере компьютер 230 измерения и его система 270 хранения может работать согласно гораздо менее строгим требованиям в реальном времени.
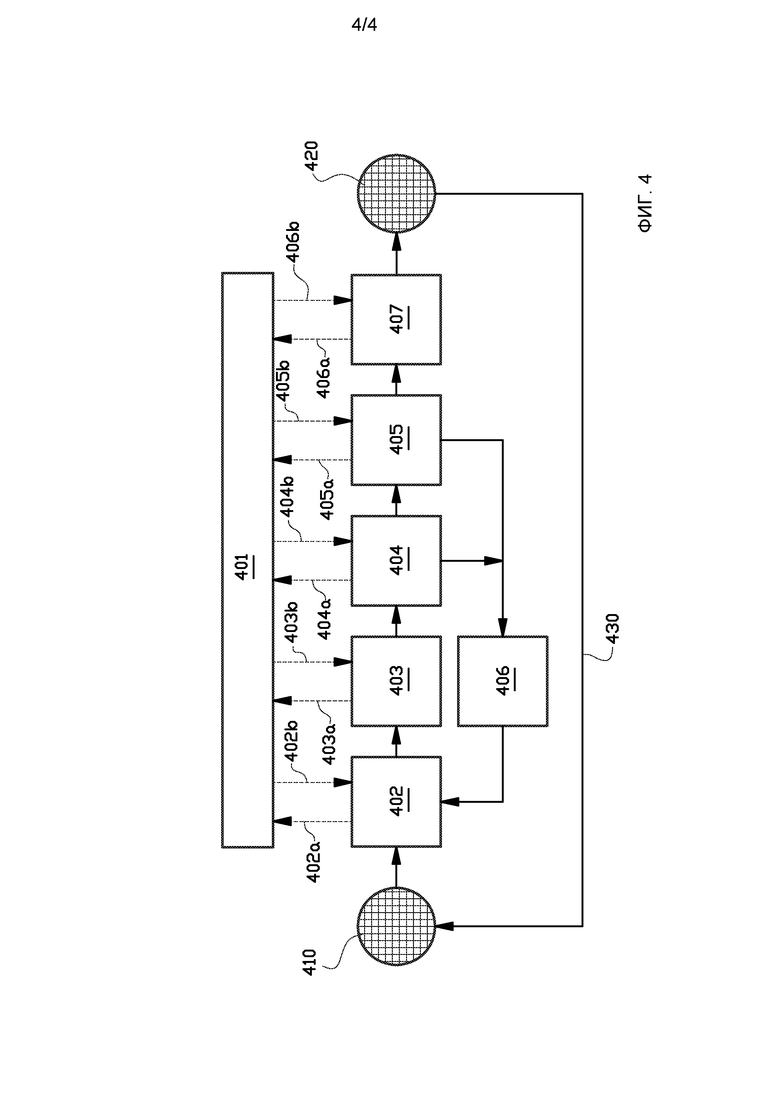
На Фиг. 4 схематически показана технологическая линия для обработки мишени, содержащая устройство 402 нанесения покрытия, литографическую систему 403 согласно изобретению, устройство 404 проявки, устройство 405 обследования и устройство 407 травления, любое из которых может принимать данные 402b, 403b, 404b, 405b, 407b управления от главного блока 401 управления и может передавать данные 402a, 403a, 404a, 405a, 407a обратной связи на главный блок 401 управления. Технологическая линия дополнительно содержит устройство 406 удаления для удаления резиста с мишеней, которые были отвергнуты в ходе обработки.
Процесс начинается с мишени, в этом случае, пластины 410. Мишень вставляется в устройство 402 нанесения покрытия, которое наносит резист на экспозиционную поверхность пластины. Затем покрытая пластина вставляется в литографическую систему 403, которая является литографической системой согласно изобретению. Литографическая система 403 содержит систему управления посредством обратной связи и систему хранения, как описано выше. Поскольку система управления посредством обратной связи литографической системы действует по существу независимо от системы хранения, сохраненные данные обратной связи могут считываться из системы хранения и передаваться на главную систему управления, не оказывая влияния на работу системы управления посредством обратной связи.
Затем экспонированная пластина транспортируется в устройство 404 проявки, где резист проявляется. В случае, когда позиционирование в ходе экспозиции выходит за пределы заранее определенного допуска, резист не проявляется, но пластина отвергается и транспортируется на устройство 406 удаления. Устройство 406 удаления выполнено с возможностью удаления резиста с пластины, что позволяет снова покрывать ту же пластину с помощью устройства 402 нанесения покрытия для повторного использования. В случае, когда в ходе проявки пластины выявляются ошибки, пластина также транспортируется на устройство 406 удаления.
В случае, когда в ходе обработки не обнаружено никаких существенных ошибок, пластина обследуется на устройстве 405 обследования. Это устройство использует растровый электронный микроскоп и т.п. для проверки, соответствуют ли размеры экспонированных признаков в резисте техническим условиям. Например, можно измерять значения ширины линий признаков. Если обследуемые признаки в резисте выходят за рамки технических условий, то пластина отвергается и транспортируется на устройство 406 удаления для удаления резиста с пластины и подготовки пластины к повторному использованию.
Если экспонированный шаблон соответствует техническим условиям, то пластина транспортируется на устройство 407 травления и подвергается травлению и/или механической полировке с применением химикатов.
Обычно интегральная схема, которая вырезается из пластины, содержит множество слоев, и пластина проводится через устройство 402 нанесения покрытия, литографическую систему 405, устройство 404 проявки, устройство 405 обследования и устройство 407 травления соответствующее число раз для построения этих слоев. Таким образом, в ходе обработки мишени от начала до конца, становятся доступны очень большие объемы позиционных данных, которые нужно хранить по меньшей мере пока мишень находится в обработке. В случае возникновения ошибки на любом из этапов обработки мишени, позиционные данные могут помогать в отслеживании источника ошибки. Кроме того, позиционные данные можно использовать для улучшения процесса.
В итоге, настоящее изобретение относится к литографической системе для шаблонирования мишени, причем упомянутая система содержит систему управления посредством обратной связи, содержащую привод для перемещения мишени, измерительную систему для измерения положения упомянутой мишени, и блок управления, выполненный с возможностью управления приводом на основании положения, измеренной измерительной системой, причем упомянутая система управления посредством обратной связи имеет первую задержку, которая является максимальной задержкой между измерением и управлением приводом на основании упомянутого измерения, систему хранения для хранения измеренных положений, содержащую приемный буфер и блок хранения, причем вторая задержка является средней задержкой между приемом измеренных положений в приемном буфере и сохранением упомянутых измеренных положений в блоке хранения, причем первая задержка по меньшей мере на порядок величины меньше второй задержки, причем система управления посредством обратной связи содержит однонаправленное соединение для передачи упомянутых измеренных положений на систему хранения.
Следует понимать, что вышеприведенное описание приведено для иллюстрации работы предпочтительных вариантов осуществления и не призвано ограничивать объем изобретения. Из вышеприведенного описания специалисту в данной области техники могут быть очевидны многие разновидности, которые, тем не менее, будут находиться в рамках сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНАЯ СИСТЕМА ДАТЧИКОВ | 2010 |
|
RU2532575C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА С ДИФФЕРЕНЦИАЛЬНЫМИ ПАРАМИ | 2010 |
|
RU2559993C2 |
| ЕМКОСТНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2573447C2 |
| СЕТЕВАЯ АРХИТЕКТУРА И ПРОТОКОЛ ДЛЯ КЛАСТЕРА ЛИТОГРАФИЧЕСКИХ МАШИН | 2012 |
|
RU2573398C2 |
| СИСТЕМА ДЛЯ МАГНИТНОГО ЭКРАНИРОВАНИЯ | 2012 |
|
RU2558646C2 |
| СИСТЕМА ДВУХКАМЕРНОГО F ЛАЗЕРА С ВЫБОРОМ ЛИНИИ | 2002 |
|
RU2298271C2 |
| СИСТЕМА И СПОСОБ ХРАНЕНИЯ ДАННЫХ В ДВИЖЕНИИ | 2017 |
|
RU2691631C1 |
| СИСТЕМА И СПОСОБ ХРАНЕНИЯ ДАННЫХ В ДВИЖЕНИИ | 2017 |
|
RU2717559C2 |
| ПУТИ ПУЧКА ИОНОВ НА ПОВЕРХНОСТЯХ МИШЕНИ ДЛЯ ГЕНЕРАЦИИ ПУЧКА НЕЙТРОНОВ | 2021 |
|
RU2841283C1 |
| СИСТЕМЫ, УСТРОЙСТВА И СПОСОБЫ МОНИТОРИНГА ПОЛОЖЕНИЯ ПУЧКА И ВИЗУАЛИЗАЦИИ ПУЧКА | 2020 |
|
RU2831742C1 |

Изобретение относится к области литографии и касается литографической системы и способа хранения позиционных данных мишени. Литографическая система включает в себя систему управления посредством обратной связи, содержащую привод для перемещения мишени, измерительную систему для измерения положения мишени и блок управления приводом. Кроме того, литографическая система включает в себя систему хранения измеренных положений, содержащую приемный буфер и блок хранения. Система управления также содержит однонаправленное соединение для передачи измеренных положений в систему хранения и выполнена с возможностью непрерывной работы независимо от системы хранения. Максимальная задержка между измерением и управлением приводом по меньшей мере на порядок величины меньше средней задержки между приемом измеренных положений в приемном буфере и сохранением измеренных положений в блоке хранения. Технический результат заключается в оптимизации способа получения и хранения позиционных данных. 2 н. и 25 з.п. ф-лы., 4 ил.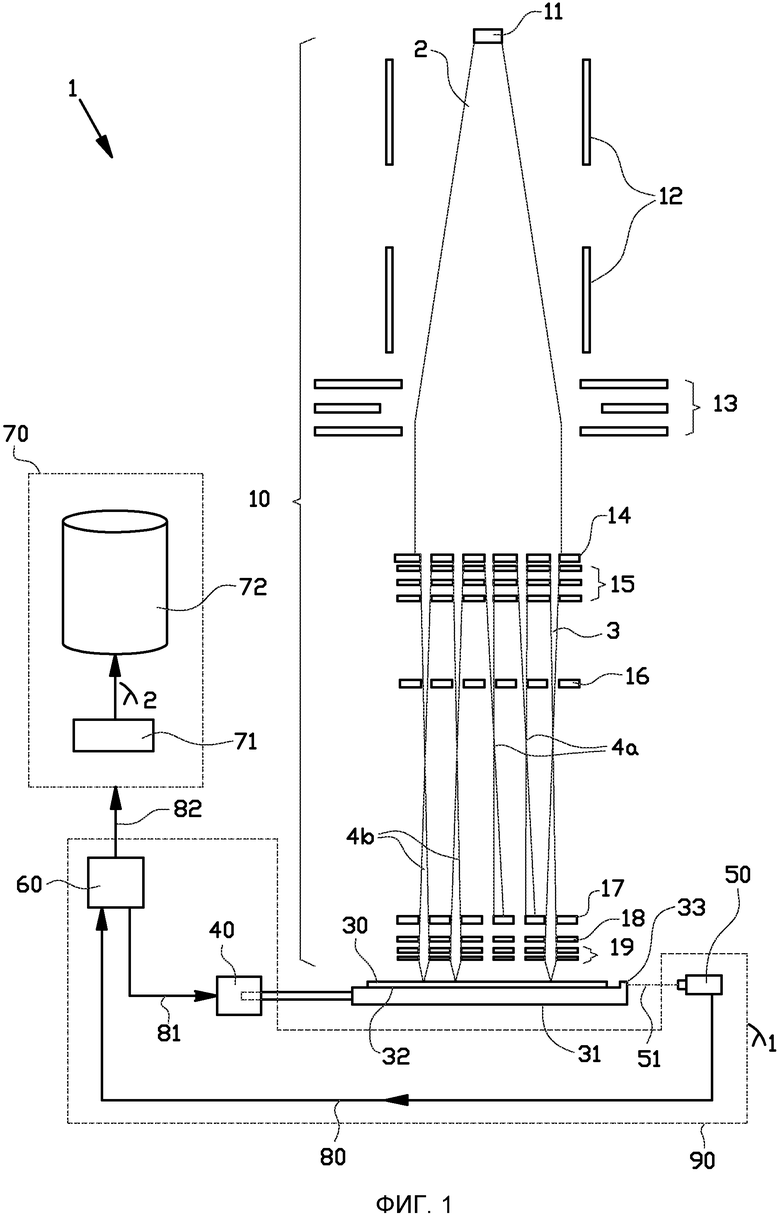
1. Литографическая система для записи шаблона на мишень с использованием одного или более экспозиционных пучков, причем упомянутая система содержит:
систему управления посредством обратной связи, содержащую привод для перемещения мишени в литографической системе, измерительную систему для, по существу, непрерывного измерения положения мишени в литографической системе, и блок управления, выполненный с возможностью управления приводом на основании положения, измеренной измерительной системой, причем упомянутая система управления посредством обратной связи имеет первую задержку, заданную как максимальная задержка между упомянутым измерением и упомянутым управлением приводом на основании упомянутого измерения,
систему хранения для хранения измеренных положений, причем упомянутая система хранения содержит приемный буфер и блок хранения, причем упомянутая система хранения имеет вторую задержку, заданную как средняя задержка между приемом измеренных положений в приемном буфере и сохранением упомянутых измеренных положений в блоке хранения,
причем первая задержка по меньшей мере на порядок величины меньше второй задержки,
причем система управления посредством обратной связи содержит однонаправленное соединение для передачи упомянутых измеренных положений в систему хранения, и при этом система управления посредством обратной связи выполнена с возможностью, по существу, непрерывной работы независимо от упомянутой системы хранения.
2. Литографическая система по п. 1, в которой из системы хранения в систему управления посредством обратной связи не отправляется никаких данных и сигналов.
3. Литографическая система по п. 1 или 2, в которой упомянутая система хранения является внешней по отношению к упомянутой системе управления посредством обратной связи.
4. Литографическая система по п. 1 или 2, в которой однонаправленное соединение содержит сетевое соединение, предпочтительно, содержащее кабель неэкранированных витых пар (UTP), экранированных витых пар (STP) или фольгированных витых пар (FTP), или оптоволоконный кабель Ethernet.
5. Литографическая система по п. 4, дополнительно содержащая сетевой коммутатор, имеющий множество входов и по меньшей мере один выход, причем по меньшей мере один из упомянутых входов соединен однонаправленным соединением с системой управления посредством обратной связи, и упомянутый выход соединен с приемным буфером.
6. Литографическая система по п. 5, в которой упомянутое однонаправленное соединение содержит соединение от измерительной системы к коммутатору и/или соединение от системы управления посредством обратной связи к коммутатору.
7. Литографическая система по п. 5 или 6, в которой сумма максимальных скоростей передачи данных упомянутого множества входов меньше максимальной скорости передачи данных по меньшей мере одного выхода.
8. Литографическая система по п. 1 или 2, в которой указанная первая задержка составляет, самое большее, 200 микросекунд, и вторая задержка составляет по меньшей мере 2000 микросекунд.
9. Литографическая система по п. 1 или 2, в которой положение, измеренное измерительной системой, содержит положение по меньшей мере в двух измерениях.
10. Литографическая система по п. 1 или 2, выполненная с возможностью использования протокола пользовательских дейтаграмм по однонаправленному соединению.
11. Литографическая система по п. 1 или 2, в которой система хранения выполнена с возможностью хранения измеренных положений в течение по меньшей мере всего промежутка времени, необходимого для обработки мишени от начала до конца.
12. Литографическая система по п. 1 или 2, в которой упомянутые положения измеряются с частотой дискретизации 5 кГц или более, причем каждая выборка предпочтительно содержит по меньшей мере 512 байт данных.
13. Литографическая система по п. 1 или 2, в которой приемный буфер выполнен с возможностью удаления данных из системы управления посредством обратной связи, когда приемный буфер полон.
14. Литографическая система по п. 1 или 2, в которой приемный буфер имеет первую емкость хранилища, и блок хранения имеет вторую емкость хранилища, причем вторая емкость хранилища по меньшей мере на три порядка величины больше первой емкости хранилища, предпочтительно по меньшей мере на 5 порядков величины.
15. Литографическая система по п. 1 или 2, в которой система управления посредством обратной связи дополнительно выполнена с возможностью передачи в систему хранения через однонаправленное соединение одного или более из данных управления, метки времени, порядкового номера, данных, представляющих внутреннее состояние блока управления, и настройки хронирования блока управления.
16. Литографическая система по п. 1 или 2, в которой система хранения выполнена с возможностью приема упомянутых данных не по порядку.
17. Литографическая система по п. 1 или 2, содержащая оптическую колонну для записи шаблона на мишень с использованием одного или более экспозиционных пучков, причем упомянутая оптическая колонна содержит фокусирующую матрицу для фокусировки упомянутых одного или более экспозиционных пучков на мишень.
18. Литографическая система по п. 1 или 2, в которой упомянутая измерительная система содержит интерферометр.
19. Литографическая система по п. 1 или 2, выполненная с возможностью записи упомянутого шаблона, в то время как упомянутая мишень перемещается в упомянутой литографической системе.
20. Литографическая система по п. 1 или 2, в которой упомянутые один или более экспозиционных пучков содержат множество пучков заряженных частиц.
21. Литографическая система по п. 1 или 2, в которой считывание данных из системы хранения не влияет на работу системы управления посредством обратной связи, когда данные передаются из приемного буфера системы хранения в блок хранения.
22. Способ хранения позиционных данных мишени, перемещаемой в литографической системе, причем упомянутый способ содержит этапы, на которых:
по существу, непрерывно измеряют положение мишени в литографической системе,
по существу, непрерывно управляют перемещением мишени для коррекции отклонений между измеренным положением и желаемым положением мишени, причем первая задержка задается как максимальная задержка между упомянутым измерением и упомянутым управлением привода на основании упомянутого измерения,
сохраняют упомянутое измеренное положение в системе хранения, причем вторая задержка задается как средняя задержка между приемом измеренных положений в приемном буфере и сохранением упомянутых измеренных положений в блоке хранения,
причем первая задержка по меньшей мере на порядок величины меньше второй задержки,
причем система управления посредством обратной связи содержит однонаправленное соединение для передачи упомянутых измеренных положений на систему хранения.
23. Способ по п. 22, в котором упомянутое управление осуществляется независимо от упомянутого сохранения.
24. Способ по п. 22 или 23, в котором измеренные положения сохраняются в течение по меньшей мере всего промежутка времени, необходимого для обработки мишени от начала до конца.
25. Способ по п. 22 или 23, в котором система управления посредством обратной связи выполнена с возможностью, по существу, непрерывной работы независимо от системы хранения.
26. Способ по п. 22 или 23, в котором из системы хранения в систему управления посредством обратной связи не отправляется никаких данных и сигналов.
27. Способ по п. 22 или 23, в котором система хранения является внешней по отношению к упомянутой системе управления посредством обратной связи.
| US 2011029685 A1, 03.02.2011 | |||
| US 2005110970 A1, 26.05.2005 | |||
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ ТРУБ | 1996 |
|
RU2096494C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РИСУНКОВ | 1999 |
|
RU2257603C2 |

