Сингулярный способ предотвращения угона транспортного средства и обеспечения безаварийного движения транспортного средства (автомобиля, самолета, мотоцикла и т.д.) в различных аварийных ситуациях, включая: опасные гидрометеорологические явления (бури, туман, град, снегопад, гололед и т.д.), аварийные участки дорог, при наличии на проезжей части животных и птиц с защитой автомобиля, водителя, пассажиров салона автомобиля и пешехода от гибели и тяжелых повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают появление в движущихся автомобилях водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем.
Способ относится к области машиностроения, в частности автомобилестроения, самолетостроения, а именно к способам защиты пешехода и транспортных средств (ТС), в частности автомобилей от угона и повреждений при движении ТС на автомобильных дорогах, а также воздушных судов - самолетов на взлетно-посадочных полосах аэродромов (ВПП) в различных аварийных ситуациях, включая: опасные гидрометеорологические явления (бури, туман, град, снегопад, гололед и т.д.), аварийные участки дорог, при наличии на проезжей части животных и птиц с зашитой автомобиля, водителя, пассажиров салона автомобиля и пешехода от гибели и тяжелых повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают появление в движущихся автомобилях водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем.
Всего в год во всем мире происходит 10 млн столкновений автомобилей (см. Public roads 2001, v.65, №1, р.41-48).
По данным Российской Госавтоинспекции только за шесть месяцев 2013 года в России в результате ДТП погибли 10 364 человека, более 100 тысяч получили ранения (ДТП под Подольском: водитель КАМАЗа не признал свою вину - ВВС - Russian - Россия www.bbc.co.uk/russian/russia/2013/07/130715_moscow_bus_mouring.shtml).
В автомобильных авариях в США в 2002 г. погибло 9.400 человек, 1,4 млн чел. - покалечено (см. Public roads 2004, с.34-39), в Европе соответственно: 40.000 человек и 1,3 млн человек (см. Traffic Technology. Int. 2004, F, March, p.101-103). Поэтому даже небольшой прогресс в области технологий по предотвращению аварийности автомобилей имеет очень важное значение для сохранения человеческих жизней и материальных ценностей.
Задумываться о защите пешехода конструкторы начали еще до широкого распространения самодвижущихся бензиновых повозок, когда на улицах городов господствовал трамвай. Система спасения пешехода при наезде трамвая, предложена в США еще в 1910 году. (см. На защиту пешехода, Наука и жизнь. 2009, с.72, Nic Fleming. Protecting pedestrians from killer cars, New scientist magazine. №2704, 18 April 2009, p.18-19).
Около 30% травм при наезде автомобиля на пешехода возникают от соударения человека с ветровым стеклом. Вопросом защиты пешехода от последствий столкновения заняты сейчас автомобильные фирмы и исследовательские центры многих стран.
Так, Роджер Харди из Кранфилдского университета (Великобритания) разработал экспериментальную систему, состоящую из обнаружителя препятствий и огромной надувной подушки безопасности. Когда система замечает, что автомобиль вот-вот столкнется с человеком, часть капота перед стеклом автоматически поднимается и выпускает большую раздутую подушку. То же происходит и при столкновении с другим автомобилем. Ветровое стекло Харди предлагает смонтировать на деформируемых полосках металла, чтобы при ударе оно слегка вдавливалось внутрь салона. Учитывая, что водитель пристегнут ремнем и перед ним тоже сработает подушка безопасности, вдавливание стекла не нанесет вреда водителю, а пешеход будет в значительной мере защищен. Эксперименты на «Фиате Стило» при скорости соударения с манекеном 40 км/ч показали, что система облегчает последствия столкновения более чем вдвое.
Исследователи фирмы «Фиат» предлагают передний бампер на пневматических амортизаторах, автоматически выдвигающийся вперед при скорости более 4 км/ч и поглощающий в случае удара часть энергии.
Сотрудники Технологического университета в Граце (Австрия) путем компьютерного моделирования установили, что радиатор грузовика должен быть слегка наклонен назад и иметь форму книги, раскрытой в сторону водителя, а корешком направленной наружу. Такая форма позволит уменьшить вероятность попадания сбитого пешехода под колеса грузовика на 80-90%.
Фирма «Вольво» поставила цель: добиться того, чтобы к 2020 году ее автомобили не могли при столкновении никого убить или травмировать ни внутри салона, ни снаружи. Модель ХС60, запущенная в ноябре 2008 года, снабжена системой, которая, по заявлению фирмы, способна предотвратить половину всех столкновений автомобилей в потоке на малой скорости. Лазерный дальномер измеряет расстояние до переднего автомобиля, 50 раз в секунду измеряет скорость обеих машин и рассчитывает резкость торможения, нужную, чтобы предотвратить столкновение. Если водитель машины не отреагирует, система затормозит сама.
Модель Volvo S60, 2010 года, способна самостоятельно тормозить перед пешеходом. Радар и видеокамера с программой распознавания образов подают сигнал при появлении человека перед капотом. Если водитель не отреагирует моментально, включается торможение. Фирма заявляет, что эта система полностью предотвратит наезд на пешехода при скорости до 19 км/ч, а на более высоких скоростях уменьшит силу столкновения на 75%.
Также известны и другие системы и способы предотвращения столкновений автомобилей.
В автомобиле Jaguar XJ имеется система распознавания автомобиля с пешеходом. В случае столкновения приподнимают капот на небольшую высоту, чтобы предотвратить удар человека о жесткие детали двигателя, находящегося под капотом (см. http://www.spbvoditel.ru/2010/09/07/003/).
Фирма Форд разрабатывает системы предотвращения столкновений. [http://seclife.ru/article/ford-razrabatyvaet-sistemu-predotvrashcheniya-stolknovenii]. Высокотехнологичные защитные системы, призванные предотвращать разного рода ДТП, более не являются прерогативой концептов и автомобилей высшего класса.
Ford ведет активные разработки подобных систем для серийных моделей - после презентации Ford Smart Intersection, с помощью которой автомобиль «общается» со светофорами и знаками через GPS, автопроизводитель объявил о разработке еще одной новинки - системы предотвращения аварий с помощью встроенного радара. В следующем году технологию планируется представить в нескольких моделях Ford.
С помощью звукового и визуального сигналов Collision Warning предупреждает водителя о потенциально опасных объектах на пути автомобиля, будь то какие-то препятствия или другие машины. Если водитель не среагировал вовремя, компьютер активирует так называемый Brake Support, который в сочетании с системой экстренного торможения ЕВА останавливает автомобиль до непосредственного столкновения.
Недостатком этих систем является недостаточная защищенность пешехода, т.к. он получает травму от удара о металлический капот, а при большой скорости автомобиля - серьезную травму или смертельные ранения.
Известен способ предотвращения столкновений автомобиля с препятствиями (см. Патент США №7243026, МПК G08G 1/16). В этом патенте подробно описана автомобильная система, в которой обнаруживают препятствия, получают трехмерные изображения, распознающих с помощью видеокамер, радиолокатора, датчиков скорости движения, угла поворота рулевого управления, дисплея исполнительного устройства, исполнительного устройства, управляющего тормозной системой и динамика для предупреждения водителя об опасной близости препятствия.
Недостатками данной системы являются:
- отсутствие защиты пешехода от повреждения автомобилем и самого автомобиля в случае, когда столкновение неизбежно;
- отсутствие информации об опасных гидрометеорологических явлениях;
- отсутствие сопряжения с системой GPS.
В настоящее время стирается грань между автомобилем и самолетом. Появились летающие автомобили, некоторые даже выпускаются серийно, (см. http://ru.wikipedia.org/wiki/Terrafugia_Transition).
Поэтому системы и способы предотвращения столкновений одинаково актуальны как для автомобилей, так и для самолетов и международная патентная классификация у них одинаковая G08G.
Известно устройство предотвращения столкновения самолета с птицами (см. NEBABIN, V. An On-board Bird Recognition Device for the Prevention of Bird strikes. International Bird Strike Committee. Proceeding and Papers. London 13-17 May, 1996, p.555-560), при этом птиц распознают по их спектральным признакам, величине эффективной поверхности рассеяния и осуществляют в воздухе маневр для уклонения от столкновения птиц с самолетом.
Недостатком данного устройства является то, что оно не работает в случае наличия посторонних предметов на ВПП, что произошло при катастрофе французского самолета Конкорд на ВПП в Париже, который столкнулся с посторонним предметом на ВПП. (см. Foreign-object Damage Cripples Concorde on Takeoff From Paris. Accid.Prev.2002, v.59., №4. p.1-8).
Известен способ предупреждения угрозы столкновения летательного аппарата с препятствиями подстилающей поверхности, т.е. с землей (см. патент RU №2297047, МПК G08G 5/04, опубл. 10.04.2007).
Способ заключается в предварительном формировании базы данных рельефа подстилающей поверхности, аэронавигационной базы данных, базы данных летно-технических характеристик летательного аппарата (ЛА). Вычисляют границы зоны внимания и зоны управления (ЗУ), выделяют препятствие, представляющее наибольшую угрозу, попавшее в ЗУ и находящееся в зоне прогноза вычисленной траектории. С учетом данных об ограничениях на параметры движения ЛА и внешних воздействий вычисляют параметры номинального движения, обеспечивающие пролет препятствия на высоте, близкой к минимально допустимой. Генерируют сигналы управления согласно выбранному закону управления и с учетом воздействия факторов внешней среды, которые подают на исполнительные органы управления высотой полета и тягой двигателей, а также выводят на экран командного пилотажного индикатора.
Однако известный способ имеет следующие недостатки:
- необходимо учитывать рельеф местности и режим полета (скорость встречного или попутного ветра и др.).
Известен также способ и система предупреждения столкновений автомобиля с препятствиями в т.ч. с поездом, спецавтомобилями, полицейскими, пожарными (см. Патент США №6.924.736, МПК G08G 1/23, В 60 Q, НПК 340/436). Способ заключается в том, что принимают сигналы системы GPS, используют дорожные карты, определяют взаимные скорости относительно друг друга, определяют местоположение автомобилей, сравнивают информацию о координатах на контролируемом дорожном участке, формируют предупреждающий сигнал на дисплей для предотвращения столкновения.
Патент США №6.924.736 и заявляемый способ имеют следующие общие признаки:
- используют данные спутниковой навигации
- определяют местоположение автомобиля
- принимают информацию об участке дороги
- на дисплее автомобиля отображают полученную информацию и учитывают ее при анализе дорожной обстановки
Однако известный способ имеет следующие недостатки:
- отсутствие защиты пешехода от повреждений автомобилем и самого автомобиля в случае, когда столкновение неизбежно;
- отсутствие информации о состоянии здоровья, не учитывают грубые нарушения Правил дорожного движения, а также данные об опасных гидрометеорологических явлениях.
Известные способы также не обеспечивают защиту от опасных синоптических явлений. Например, в Германии, где наиболее развито автомобилестроение с использованием высоких технологий 9 апреля 2011 года на автобане, где все четыре полосы скоростной трассы А 19 вблизи города Росток в ФРГ были внезапно занесены бурей из песка и земли. В результате 8 погибших, 41-раненых, столкнулись 80 легковых автомобилей, 3 грузовика, 20 машин загорелись, в том числе грузовик с легковоспламеняющимися веществами. Движение на автобане А 19 полностью перекрыто из-за этого погодного явления.
Подобные явления нередки. Недавно они произошли в Китае, в Австралии, в Саудовской Аравии в Эр-Рияде (см. http://www.bbc.co.uk/Russian/international/2011/04/110409_germany_freak_sandstorm.shtml 09.04.2011).
Для защиты от подобных масштабных катастроф в существующих способах предотвращения столкновений транспортных средств-автомобилей не выполняют функции обнаружения опасных гидрометеорологических явлений, не вырабатывает управляющих сигналов, предназначенных для выполнения маневра уклонения, либо прекращения движения и парковки в безопасном месте.
Наиболее близким по технической сущности к заявляемому способу, т.е. является прототипом, который описан в: патенте Украины №102564 заявлен 20.04.2011 г., автор Небабин В.Г. «Сингулярний спосiб забезпечення безаварiйного руху транспортного засобу в аварiйних ситуцiях»; патенте РФ по заявке №2011127597/11(040878), заявлен 05.07.2011, решение о выдаче патента на изобретение Федеральной службы по интеллектуальной собственности от 12.07.2013 г., автор: Небабин В.Г. «Сингулярный способ обеспечения безаварийного движения транспортного средства в различных аварийных ситуациях…».
Прототип и заявляемый способ имеют следующие общие признаки:
- используют данные спутниковой навигации;
- определяют местоположение автомобиля;
- принимают информацию об участке дороги;
- на дисплее автомобиля отображают информацию и учитывают ее при анализе дорожной обстановки;
- используют наружные подушки безопасности. Однако известный способ имеет следующие недостатки:
- отсутствует защита от угона автомобиля;
- недостаточная защита пешехода при большой скорости автомобиля, который столкнулся с пешеходом.
В основу способа поставлена задача создания способа предотвращения угона транспортного средства и обеспечения безаварийного движения транспортного средства в различных аварийных ситуациях, например: появление опасных гидрометеорологических явлений (бури, туман, гололед, снегопад, и т.д.), аварийные участки дорог, наличие на проезжей части дорог животных и птиц с защитой автомобиля, водителя автомобиля, пассажиров салона автомобиля и пешехода от гибели и тяжелых повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают доступ в автомобили водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем.
Поставленная задача решена в том, что предложен сингулярный способ предотвращения угона транспортного средства (ТС) и обеспечения безаварийного движения автомобиля или иного транспортного средства в различных аварийных ситуациях, включая: появление опасных гидрометеорологических явлений (бури, туман, гололед, снегопад, и т.д.), аварийные участки дорог, наличие на проезжей части дорог животных и птиц с защитой автомобиля, водителя автомобиля, пассажиров салона автомобиля и пешехода от гибели и тяжелых повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают доступ в автомобили водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем, содержащий следующие этапы: постоянно принимают данные спутниковой навигации, определяют местоположение транспортного средства, принимают информацию об участке дороги с помощью датчиков различных диапазонов волн, комплексируют эти данные, распознают потенциально опасные объекты, отображают на дисплее транспортного средства полученную информацию, с учетом дорожной обстановки, а перед запуском двигателя контролируют биометрические данные водителя и состояние здоровья водителя, и если оно отличается от порогового значения, и на наличие алкоголя, то формируют исполнительный сигнал, блокирующий включение двигателя, принимают информацию об опасных метеоявления из гидрометеоцентров и отображают ее на дисплее транспортного средства вместе с анализом дорожной обстановки, при этом при невозможности предотвращения столкновения транспортного средства с пешеходом, активируют и формируют и подают сигналы управления на внешнюю воздушную подушку безопасности (ВВПБ) отличающийся тем, что ВВПБ выполняют в виде надувного полого мешка, имеющего форму: конуса, пирамиды или части эллипсоида произвольной формы в форме большого сачка длиной большей чем длина самого ТС, при этом ширина входного отверстия ВВПБ больше ширины автомобиля, что обеспечивает защиту пешехода при боковом столкновении с пешеходом, а ВВПБ для обеспечения жесткости снизу укрепляют с помощью выдвигаемых телескопических поддонов (ВТП), которые открывают путем того, что выстреливают соответствующие пиропатроны, а сами ВТП находятся до аварийной ситуации в сложенном состоянии в верхней части капота, на крыше и в багажнике ТС, при этом в аварийной ситуации когда избежать столкновения ТС с пешеходом не удается ВВПБ и ВТП срабатывают одновременно, либо автоматически от сигнала управления, либо в ручном режиме путем выдачи сигнала от специальной кнопки от водителя (пилота) управляющего ТС, при этом пешеход перемещается внутри ВВПБ и если пешеход перемещается в обратном направлении, срабатывает датчик движения тела пешехода в обратом направлении и тем самым надувают внешнюю воздушную подушку безопасности в виде клапана закрывающего вход ВВПТ, чем предотвращают выпадение пешехода из ВВПБ, при этом пешеход совершает колебательные движения в ВВПБ и расходует на них кинетическую энергию, которую он получил при столкновении с ТС, тем самым спасают его от повреждений и гибели, а на пешеходах для большего их различения устанавливают автономные излучатели электромагнитных волн (ЭМВ), при этом дополнительно определяют перед началом
и в ходе движения перед и под ТС потенциально опасные объекты на дороге в виде: острых предметов могущих повредит шины (гвозди и т.д.), посторонние предметы: камни, кирпичи, открытые канализационные люки, ямы, а также посторонние потенциально опасные объекты, такие как мины под днищем ТС; а для предотвращения угона ТС, на ТС устанавливают датчик угона автомобиля из которого постоянно передают информацию на пункт обработки информации о возможных угонах ТС, например в дорожную полицию VIN-код автомобиля, госномер, данные о владельце и его средствах связи (мобильном телефоне), и координатах на которых он оставил на стоянке или гараже, при этом постоянно анализируют координаты стоянки ТС и если они изменяются вследствие несанкционированного перемещения самого ТС, либо с помощью другого ТС, например, эвакуатора, то передают владельцу ТС и в пункт обработки информации дорожной полиции сигнал о попытке угона, соответствующего ТС, при этом перед началом и во время движения ТС производят контроль функционирования основных устройств ТС таких как двигатель, попадание в него воды и т.д., тормозной системы состояние колодок и наличие в ней тормозной жидкости, наличие топлива, крепление колес и т.д. и в случае обнаружения неисправностей формируют соответствующие сигналы, и если водитель не реагирует на них адекватно, то автомобиль принудительно паркуется в безопасном месте, двигатель выключается, включается аварийная сигнализация и передается сигнал бедствия в пункт дорожной полиции, и (либо) на станцию технического обслуживания, а во время движения ТС постоянно производят оценку возможного столкновения ТС с другим ТС и в случае превышения допустимой вероятности производят индикацию об этой опасности водителя, а в случае не адекватной реакции, ТС принудительно паркуется в безопасное место, двигатель выключается и передается информация об этой предпосылке к ДМП в дорожную полицию. А также не только перед началом ни и во время движения контролируют состояние здоровья и наличие алкоголя водителя, и если оно отличается от порогового значения тем более резко ухудшилось (инсульт, инфаркт) то формируют исполнительный сигнал, которым ТС принудительно паркуют в безопасное место, двигатель выключается и передается об это информация в пункт оказания корой медицинской помощи и в дорожную полицию.
Способ по п.1 отличающийся тем, что в качестве автономных излучателей ЭМВ используют мобильные телефоны введением дополнительного режима, когда периодически излучают ЭМВ в виде кодированных последовательностей позволяющих идентифицировать пешехода и его координаты.
Способ по п.1, отличающийся тем, что в качестве автономных излучателей ЭМВ используют спутниковые навигаторы пешеходов, путем введения в них дополнительного режима, когда периодически излучают ЭМВ в виде кодированных последовательностей позволяющих идентифицировать пешехода и его координаты.
При опрокидывании транспортного средства, например, автомобиля, срабатывает устройство анализа дорожной обстановки и принятия решения формируют сигналы управления и надувают подушки безопасности (airbag) со всех сторон автомобиля - слева сзади, справа сзади, сверху, снизу, справа спереди и слева спереди - автомобиль оказывается внутри полого надутого куба, огибающего форму защищаемого автомобиля, состоящего из подушек безопасности и надуваются подушки безопасности (airbag) со всех сторон автомобиля - слева сзади, справа сзади, сверху, снизу, справа спереди и слева спереди - при этом автомобиль оказывается внутри полого надутого куба, огибающего форму защищаемого автомобиля, состоящего из подушек безопасности, также контролируют соблюдение правил дорожного движения водителем автомобиля и в случае если водитель их грубо нарушает - дистанционно и принудительно припарковывают автомобиль-нарушитель к ближайшему подходящему месту и заглушают двигатель. При этом дополнительно принимают более точную навигационную информацию о местоположении своего автомобиля и соседних автомобилей от системы местной навигации, а на рельсовом транспортном средстве уменьшают тормозной путь путем включения специальных электромагнитов, для уменьшения тормозного пути, в случае необходимости, дополнительно отстреливают тормозные парашюты.
Поставленная задача решена также тем, что для усиления ответственности и укрепления дисциплины в соблюдении ПДД водителем при управлении им автомобилем и предотвращения возможных аварийных ситуаций, на всех автомобилях устанавливают систему объективного контроля (см. блок-30, фиг.8) - самописцы на самолетах так называемые «черные ящики», которые фиксируют параметры движения своего и соседних автомобилей передают по СПД 21 в систему контроля 17 за дорожным движением - в дорожную полицию и в случае спорной ситуации данные самописцев используют для уяснения виновной стороны. От автомобилей передается на пункт контроля 17 за дорожным движением (дорожная полиция) - VIN-код автомобиля, государственный номер и реквизиты владельца.
На транспортном средстве устанавливают спутниковую систему навигации и систему объективного контроля водителя, а перед запуском двигателя контролируют биометрические данные водителя и состояние здоровья водителя, и если оно отличается от порогового значения и на наличие алкоголя, то формируют исполнительный сигнал, блокирующий включение двигателя, принимают информацию об опасных метеоявлениях из гидрометеоцентров и отображают ее на дисплее автомобиля вместе с анализом дорожной обстановки, при этом при невозможности предотвращения столкновения автомобиля с пешеходом, активируют и подают сигналы управления на внешнюю воздушную подушку безопасности (ВВПБ), которая образует защитное и закрытое с боков ложе, по которому пешеход перемешается в сторону к лобовому стеклу, которое также защищено частью подушки безопасности, а при срабатывании датчика движения тела пешехода в обратном направлении, формируют сигналы управления, при которых срабатывает верхняя внешняя подушка безопасности в виде клапана, которая закрывает вход в верхнюю воздушную подушку безопасности, а при опрокидывании транспортного средства, например, автомобиля, срабатывает устройство анализа дорожной обстановки и принятия решения формируют сигналы управления и надувают подушки безопасности (airbag) со всех сторон автомобиля - слева сзади, справа сзади, сверху, снизу, справа спереди и слева спереди - автомобиль оказывается внутри полого надутого куба, огибающего форму защищаемого автомобиля, состоящего из подушек безопасности и надуваются подушки безопасности (airbag) со всех сторон автомобиля - слева сзади, справа сзади, сверху, снизу, справа спереди и слева спереди - при этом автомобиль оказывается внутри полого надутого куба, огибающего форму защищаемого автомобиля, состоящего из подушек безопасности, также контролируют соблюдение правил дорожного движения водителем автомобиля и в случае если водитель их грубо нарушает дистанционно и принудительно припарковывают автомобиль-нарушитель к ближайшему подходящему месту и заглушают двигатель. При этом дополнительно принимают более точную навигационную информацию о местоположении своего автомобиля и соседних автомобилей от системы местной навигации, для уменьшения тормозного пути, в случае необходимости, дополнительно отстреливают тормозные парашюты.
Способ заключается в обзоре левой, передней и правой областей перед движущимся ТС и на самой поверхности земли на наличие мешающих объектов, а также препятствий, ям, посторонних предметов, а затем их распознавания, с помощью трехмерных датчиков разных диапазонов волн, выдающих трехмерную информацию: акустических - 22; инфракрасного - 31, радиолокационного - 27, оптического диапазонов - 33, а также, датчика обнаружения посторонних закладных устройств - 41, датчика обнаружения потенциально опасных предметов на дороге - 43, автономных излучателей пешеходов - 44, с последующим комплексированием информации, распознаванием объекта, находящегося в зоне возможного столкновения: пешеход крупного, среднего, малого размера, животное крупного, среднего, малого размера, птица, другое транспортное средство и его тип: грузовой автомобиль, легковой автомобиль, гужевой транспорт, мотоциклист, велосипедист, выборе оптимального способа защиты автомобиля и объекта от возможного столкновения и если столкновение предотвратить нельзя, то выбирается оптимальный способ защиты автомобиля в зависимости от типа объекта возможного столкновения.
Проанализируем аварийную ситуацию: при столкновении автомобиля с пешеходом.
Автомобиль движущийся со скоростью Va и массой Ma имеет кинетическую энергию:
Эта энергия автомобиля частично, с коэффициентом K<1, расходуется при столкновении с пешеходом с массой mn на его перемещение посредством получения им кинетической энергии
Эта кинетическая энергия 
Движение тела пешехода может быть описано кинематическими уравнениями, дающими зависимость координаты Sn и скорости Vn, от времени

где α - ускорение, t - время от начала соприкосновения тела пешехода с ТС, Vo - начальная скорость пешехода.
Для описания движения тела пешехода в трехмерном пространстве для каждой координаты: x, y, z

где  - модули составляющих этих параметров.
- модули составляющих этих параметров.
Из курса механики известно, что  при: y=0,
при: y=0,
при h=const=1 метр, получим
при Va=36 км/час, т.е. 10 м/с, S=4,5 м,
при Va=60 км/час, т.е.=16,7 м/с, S=7,5 м,
т.е. при скорости автомобиля 60 км/час пешеход отлетает на 7,5 метров,
при Va=120 км/час, т.е.=33,4 м/с, Sn=15 метров.
Эти расчеты хорошо согласуются с результатами реальных аварий; при столкновении с автомобилем, едущим со скоростью 30 км/час, риск смертельного исхода для пешехода равен 5%, при 50 км/час - 40%, при 65 км/час - уже 84%.
[Как обезопасить себя на дороге? - автоновости - Авто@Mail.Ru http://auto.mail.ru/article.html?id=40879]
Анализ видеозаписей происшедших самых тяжелых ДТП с видеорегистраторов [5,6,27] показывает, что самые тяжелые ДТП с гибелью или серьезными травмами пешеходов происходят тогда, когда пешеход неожиданно появляется из-за стоящего впереди автомобиля или препятствия, а также в темное время суток на плохо освещенных участках дорог. Это связано с тем, что у водителя ТС имеется мало времени для принятия правильного решения для торможения или маневра.
Для того чтобы уменьшить аварийность в вышеуказанных ситуациях целесообразно увеличить время для адекватного реагирования водителей ТС, т.е. необходимо сделать пешеходов видимыми в этих случаях. С этой целью в ПДД дополнительно введен пункт об обязательном включении фар даже в дневное время, а в Республике Беларусь - на одежду пешеходов рекомендуют нашивать светоотражающие полоски. Но этого недостаточно, поэтому в заявляемом способе предлагается использовать излучатели СВЧ диапазона для информации о координатах пешеходов, которые устанавливать на самих пешеходах. Реализовать это целесообразно несколькими вариантами:
1 вариант: использовать автономные излучатели СВЧ диапазона малой мощности;
2 вариант: использовать автономные излучатели СВЧ диапазона малой мощности устанавливая и запитывая их от уже существующих мобильных телефонов, которые имеются практически у всего населения;
3 вариант: использовать существующие автомобильные навигаторы, которые следует оснащать передатчиками координат пешеходов.
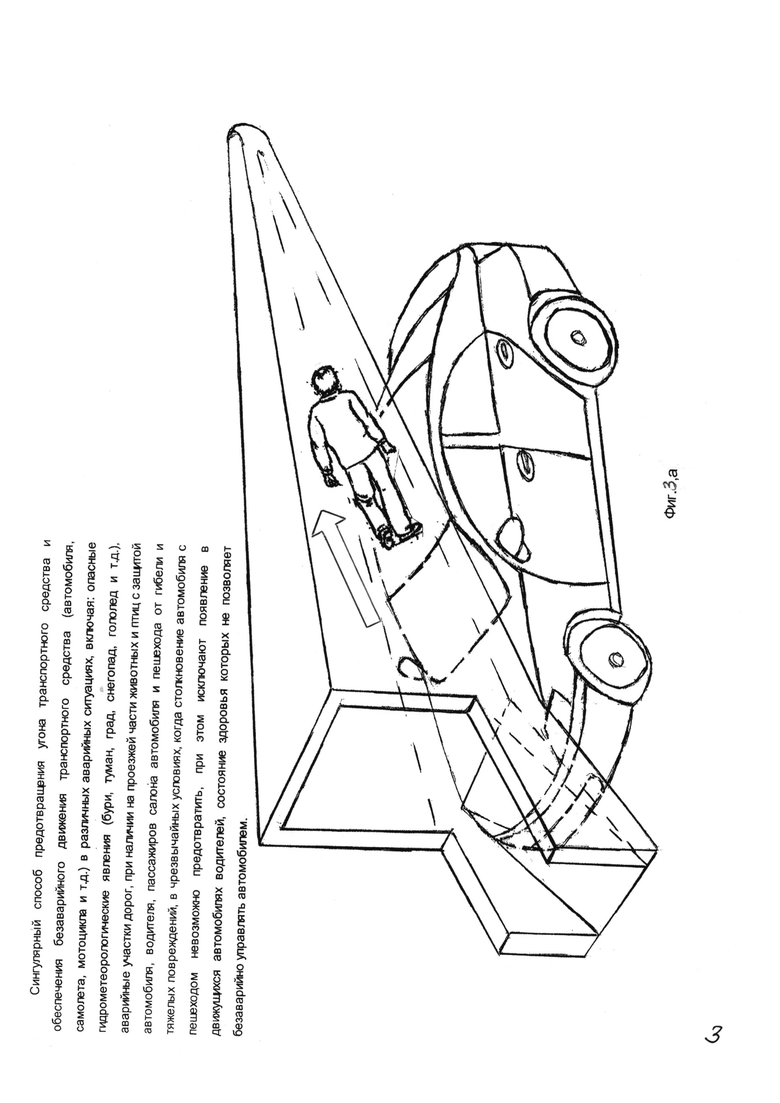
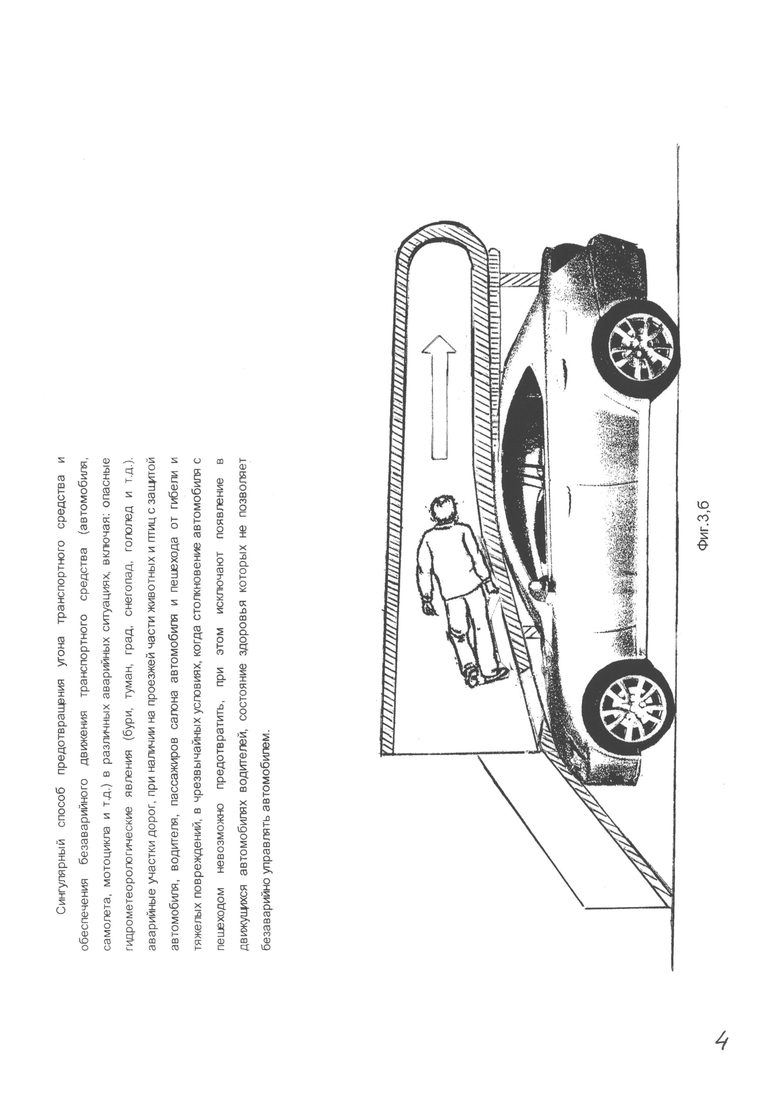
Для реализации заявляемого способа конструкцию внешней воздушной подушки безопасности(ВВПБ) выполняют в виде надувного полого конуса или части эллипсоида произвольной формы в форме большого сачка длиной, несколько большей длины самого транспортного средства, а ВВПБ для жесткости снизу укрепляют выстреливаемыми горизонтальными вертикальными телескопическими поддонами(ВТП), которые в сложенном виде находятся в верхней части капота, крыши и багажнике ТС (фиг.6). ВТП выдвигается одновременно с открыванием наружной ВВПБ, либо в автоматическом режиме от управляющего сигнала, либо в ручном режиме путем нажатия специальной кнопки, аналогичной кнопке катапультирования пилота в самолете в экстренной аварийной ситуации. В случае если ТС имеет большие размеры, ВТП могут использоваться несколько. При этом для исключения прогибания горизонтальный ВТП он может снизу укрепляться выдвигаемыми вертикальными ВТП.
Реализован выстреливаемый пиропатроном телескопический поддон может быть реализован с помощью известных конструкций [www.stankoss.ru/production/-hestego/телескопические-кожухи Мачта телескопическая М10 с башмаком (/index.php/machty-teleskopicheskie-dlya-antenn/machta-teleskopicheskaya-m10-s-flagsht oli.ru/mobile.html)
www.promunit.ru/unit.php?gid=527
mebsam.com/ustanovka-teleskopicheskix-naparlyayushix.html
www.freepatent.ru/MPK/H/H01/H01Q/H01Q/H01Q 110], а также: патент РФ №2.012.955 опубликован 15.05.1994 г.
Телескопическая пневмогидравлическая мачта; патент РФ №2.070.758 опубликован 20.12.1996. Телескопическая пневматическая мачта и способ ее монтажа и демонтажа.
Кроме этого для реализации предлагаемого способа в транспортное средство (ТС) дополнительно по сравнению с прототипом вводят:
41 - датчик посторонних закладных устройств под днищем и на поверхности, т.е. те которые установлены без ведома водителя, например, террористом установлены взрывные устройства или иные несанкционированные устройства: радиомаяки, аудио и видеозаписывающие устройства, приемо-передающие устройства и т.д. В качестве таких датчиков могут использоваться: известные емкостные датчики, датчики излучений и т.д. [18, 22-26]. Датчик угона автомобиля 42, из которого постоянно передаются: VIN-код ТС, данные о владельце ТС, координаты ТС. Датчик срабатывает после того как ТС несанкционированно изменяет координаты своего местоположения путем движения своим ходом либо с помощью другого ТС (например, эвакуатора или тягача).
В качестве такого датчика 42 можно использовать навигатор, устройство сравнения координат текущего положения ТС и координат установленных владельцем, пороговое устройство и мобильный телефон, в котором записаны: VIN-код ТС, данные о владельце: его мобильный телефон, фамилия, имя, отчество, адрес и т.д.
Такой датчик в случае попытки угона и изменения местоположения ТС формирует звуковой сигнал (сирену), блокирует включение двигателя и сообщает об этом в дорожную полицию и владельцу ТС.
В случае несанкционированного проникновения в салон при попытке угона или кражи из салона ТС, используют емкостной датчик, который также формирует звуковой сигнал (сирену) блокирует включение двигателя и сообщает об этом в дорожную полицию и владельцу.
23 - датчик движения тела пешехода в обратном направлении от конца ВВПБ ко входу в нее, например, в качестве его может использоваться известные емкостные датчики, тензометрический датчик и т.д. [18-21].
43 - датчик обнаружения потенциально-опасных предметов на дороге, перед и под автомобилем, например датчик в виде TV камеры, металлодетектора, либо радиолокатора использующего нелинейный эффект [17].
Также в качестве таких потенциально-опасных предметов могут быть острые предметы (гвозди) перед шиной, которые могут привести к ее повреждению, а обнаруживают их с помощью металлоискателя.
На многих ТС уже установлены навигаторы, возможности которых используются не в полной мере. В будущем планируется оснастить все ТС системами экстренного реагирования при авариях [1-4], а мобильные телефоны системой спутниковой навигации ГЛОНАСС [9]. Важность этой проблемы подтверждается мероприятиями федеральной целевой программы РФ «Повышение безопасности движения в 2013-2020 годах» на которую будет выделено: 32.4 миллиарда рублей [10].
Технический результат заключается в предотвращении или в уменьшении скорости столкновения ТС (автомобиля) с другим объектом и существенном уменьшении повреждений ТС (автомобилю, самолету) и пешеходу от столкновения ТС (автомобиля) (или воздушным судном) пешеходом или другим объектом на автомобильной дороге или аэродроме.
Заявленный способ поясняется следующими фигурами, где:
Фиг.1 поясняет - автомобиль с местами установки подушек безопасности в нераскрытом (упакованном) состоянии.
Фиг.2 поясняет - автомобиль, перед которым находится пешеход когда столкновение неизбежно вследствие большой скорости автомобиля, тормозной путь автомобиля I превышает расстояние до пешехода L.
Фиг.3,а и Фиг.3,б - соответственно в аксонометрии и вид сбоку поясняет вид ТС в раскрытой одной внешней воздушной подушкой безопасности (ВВПБ) и пешеходом внутри при его движении вперед для спасения пешехода, когда I>L, т.е. ТС не успевает избежать столкновения с пешеходом.
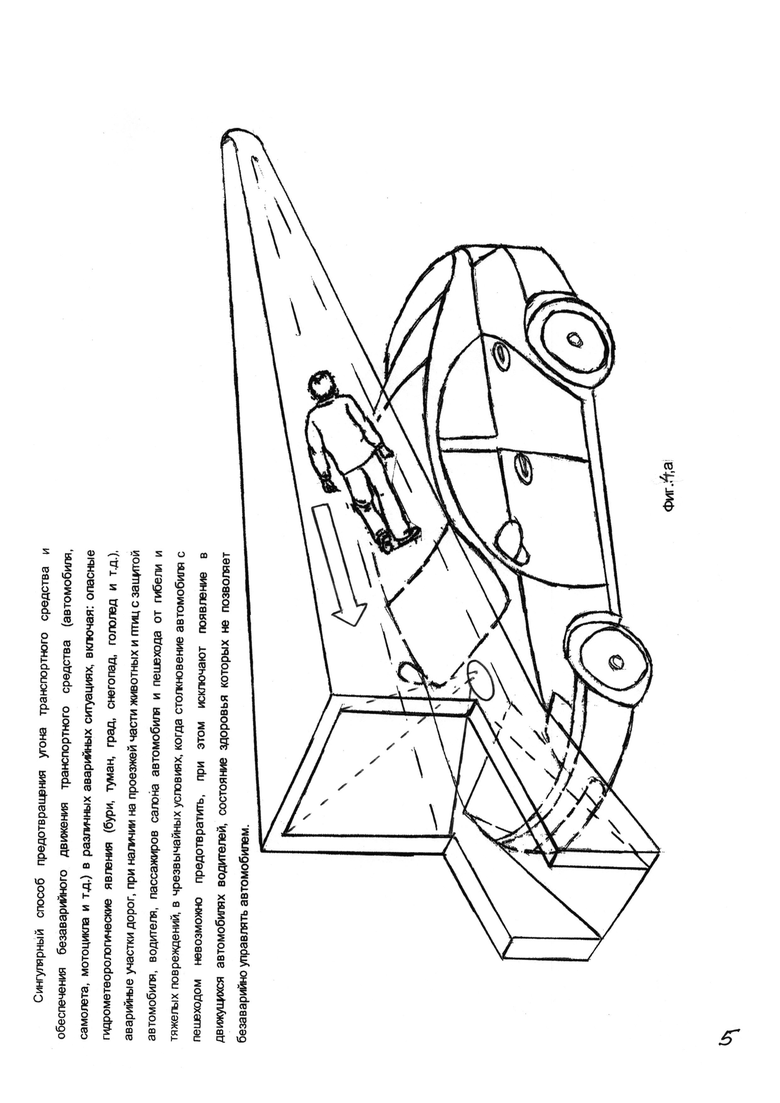
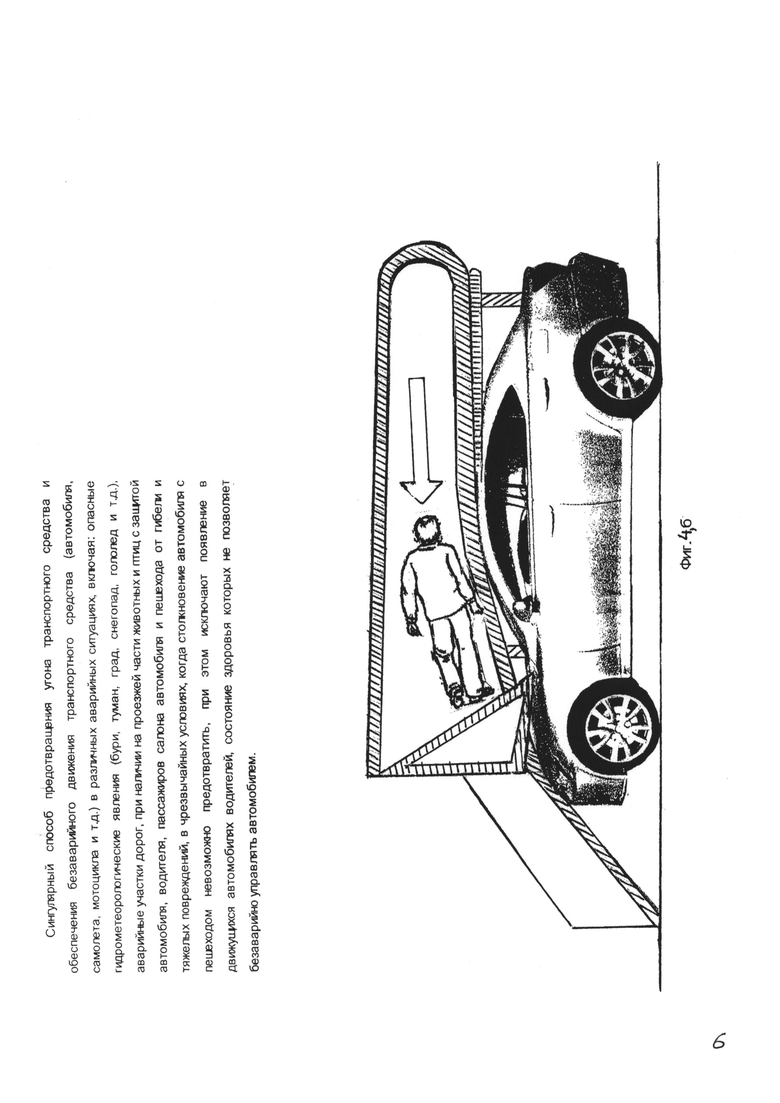
Фиг.4,а и Фиг.4,б - соответственно в аксонометрии и вид сбоку, поясняют вид ТС с раскрытыми обеими внешними воздушными подушками безопасности.
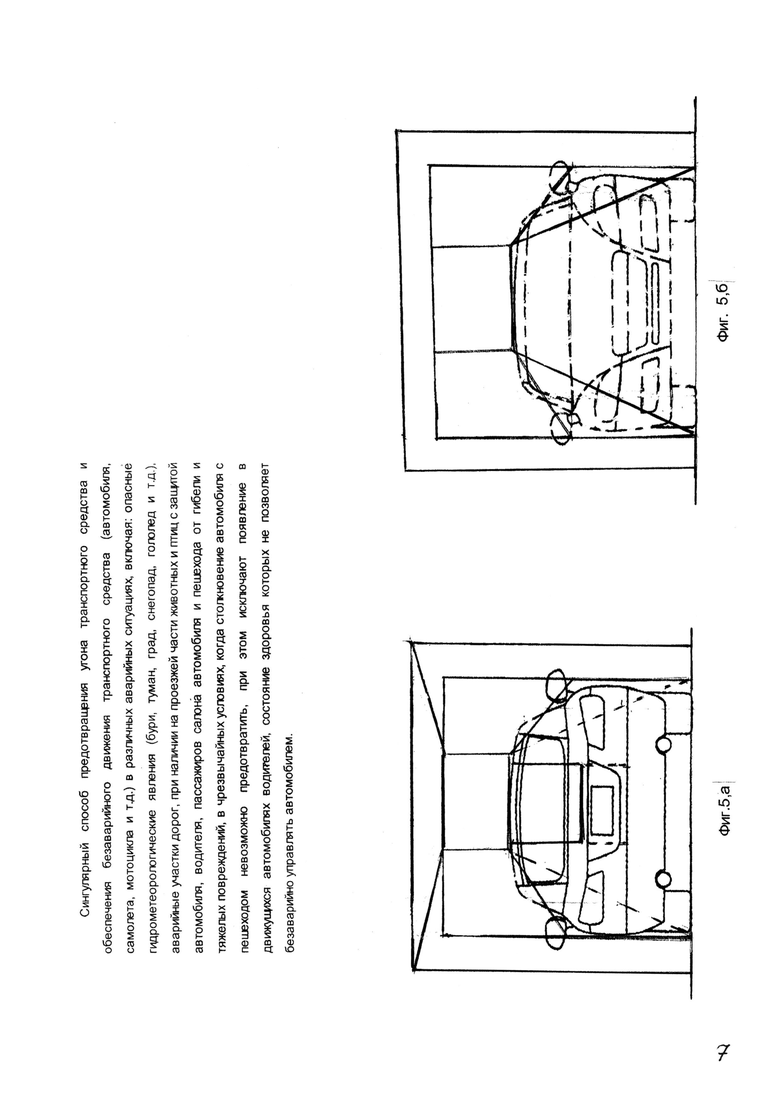
Фиг.5,а и Фиг.5,б - соответственно поясняют вид ТС сзади и спереди при открытой внешней воздушной подушке безопасности.
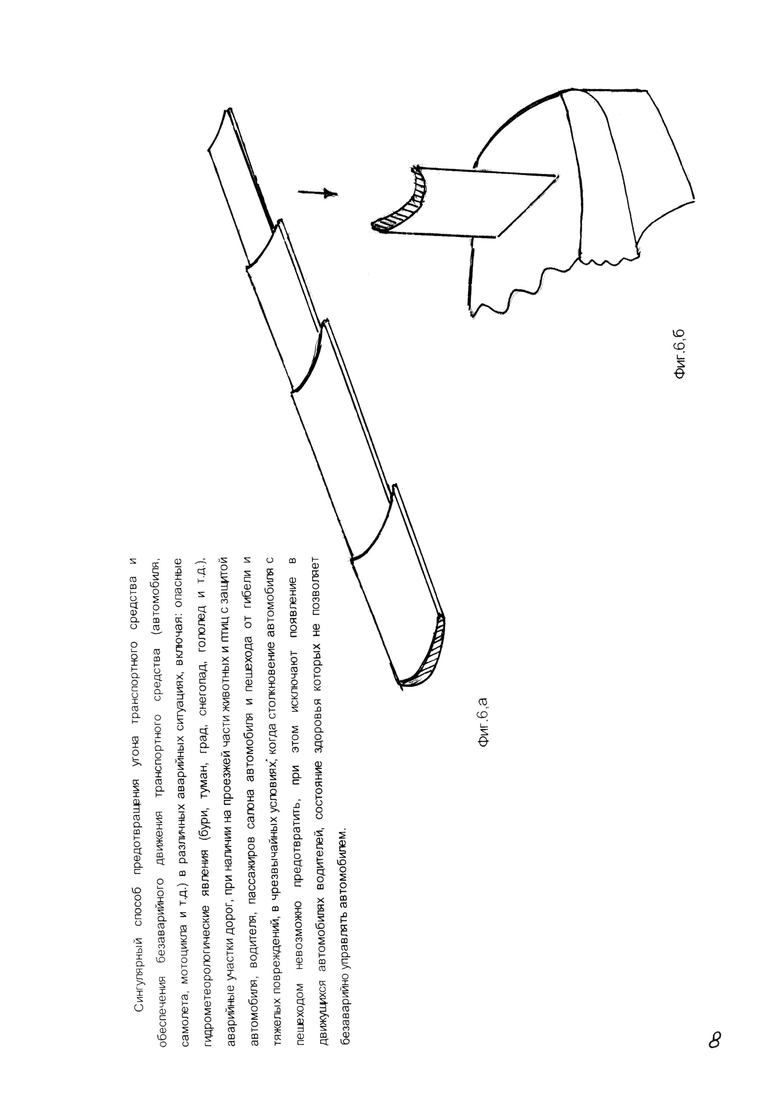
Фиг.6.а - изображен горизонтальный выстреливаемый пиропатроном телескопический поддон (ВТП), который используется для придания жесткости внешней воздушной подушке безопасности (ВВПБ).
Фиг.6,б - изображен вертикальный выстреливаемый пиропатроном телескопический поддон(упор)(ВТП).
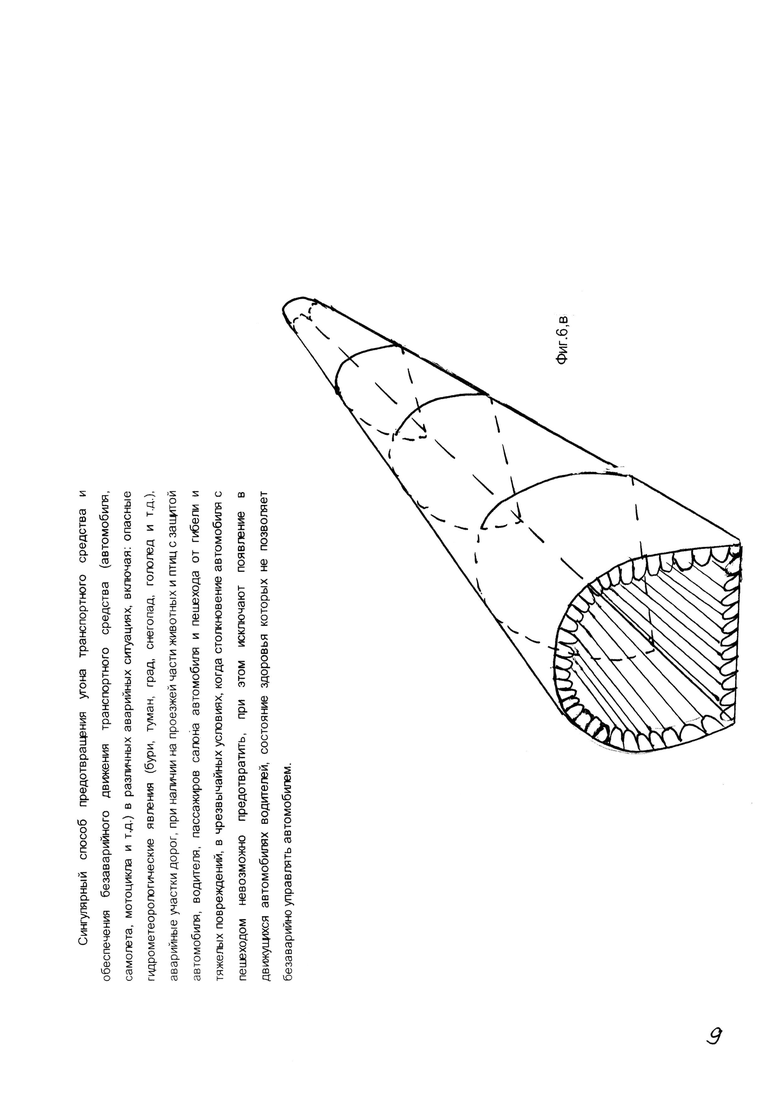
Фиг.6,в - вариант реализации ВВПБ с помощью дуг жесткости, которые находятся сверху раскрытой ВВПБ.
Фиг.7 - изображено фото с видеорегистратора - тяжелого ДТП, а именно транспортного средства с пешеходом в момент полета пешехода после столкновения (пешеход обведен кругом).
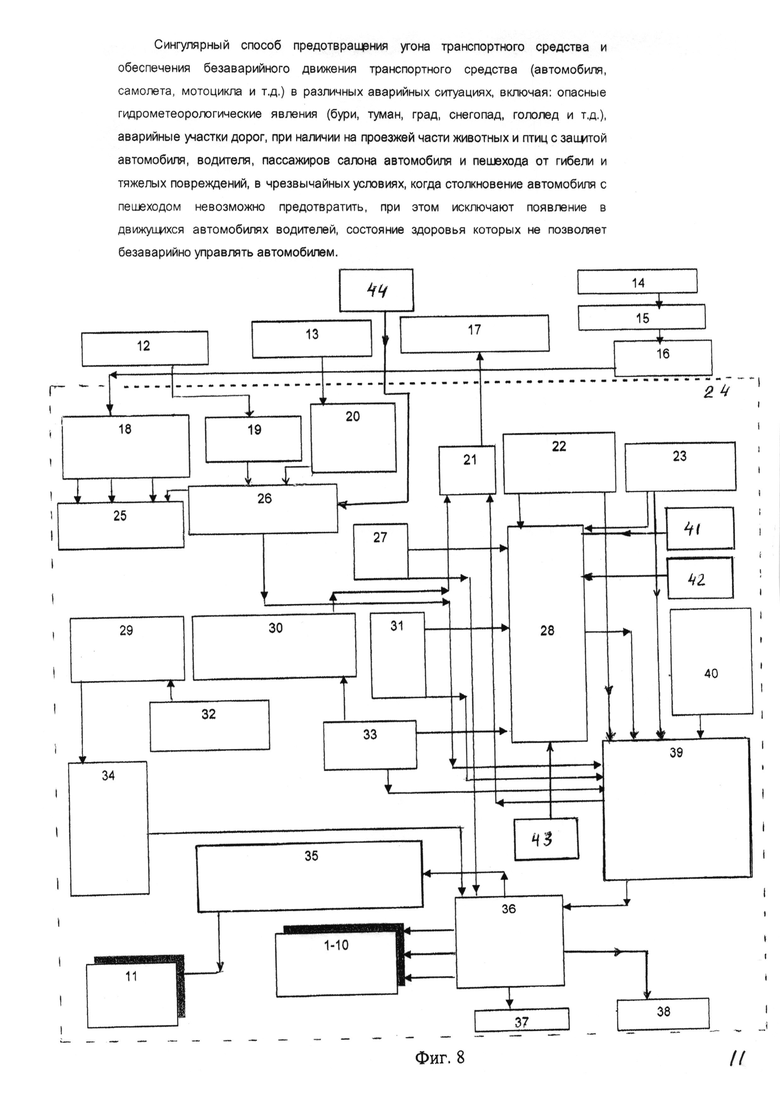
Фиг.8 поясняет структурную схему системы, реализующей заявляемый способ.
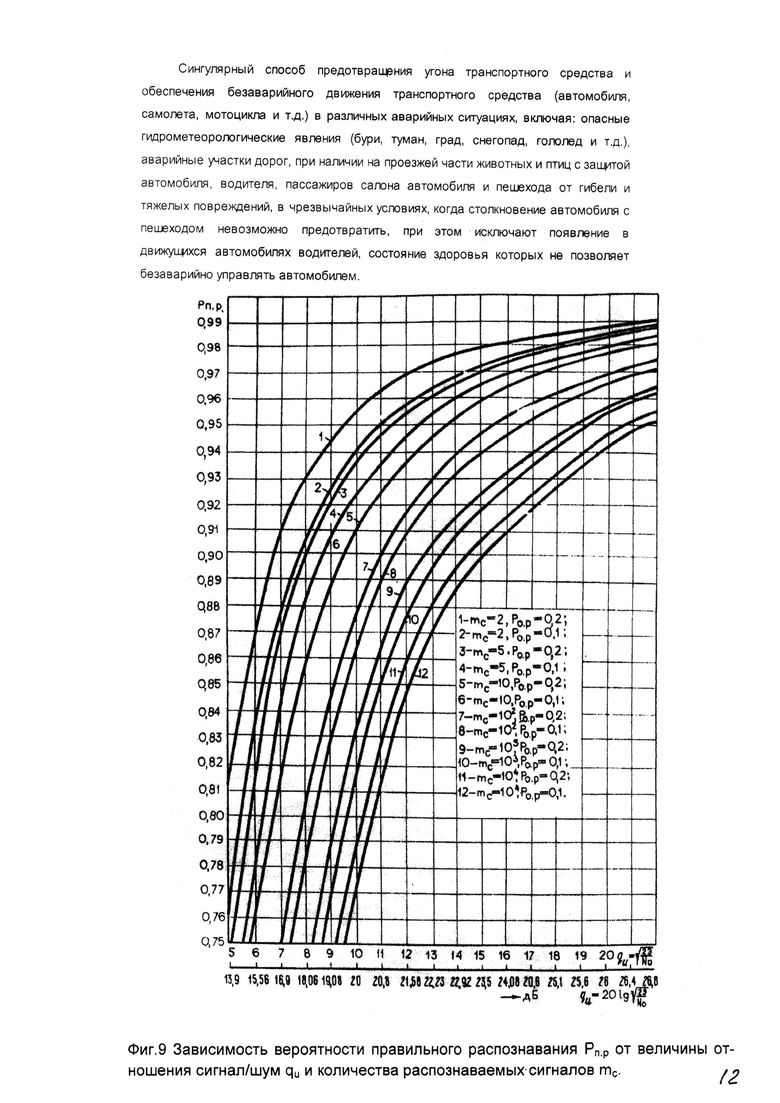
Фиг.9 поясняет графики зависимости вероятности правильного распознавания Pn.р. от величины отношения сигнал/шум q и от количества распознаваемых сигналов Pn.р. от величины отношения сигнал/шум q и от количества распознаваемых сигналов mc.
Все автомобили оснащают приемниками от системы спутниковой навигации (ССН) GPS, либо иной ССН, например ГЛОНАС, как сейчас все автомобили оснащены ремнями безопасности. В навигатор GPS водитель вводит конечную точку движения, а предлагаемая система с учетом дорожной обстановки и того, что все остальные автомобили также оснащены системой GPS выдает рекомендации по скорости и маневр при движении автомобиля, (см. http://www.svt.vologda.ru/ service/shops/gps/principle/). В системе производят анализ качества управления автомобилем водителем.
Известные устройства и способы не обеспечивают защиту неадекватного водителя, который по состоянию здоровья может совершить аварию на своем автомобиле, повредить другие автомобили, покалечить пешеходов и т.д. Известные устройства не анализируют состояние здоровья водителя и не блокируют систему включения двигателя, в частном случае в двигателях внутреннего сгорания - систему зажигания.
Для исключения этих недостатков перед началом движения и запуском двигателя проводится тестирование биометрических данных водителя, которое защищает автомобиль от угона, далее контролируют состояние здоровья водителя, измеряют частоту пульса fn и артериальное давление: диастолическое (нижнее) Рдиаст. и систолическое (верхнее) Рсист.. Подобные приборы известны и широко используются, например, электронный полуавтоматический тонометр UA - 604, фирма изготовитель «A&D company, Ltd. Medical», Япония.
Если:
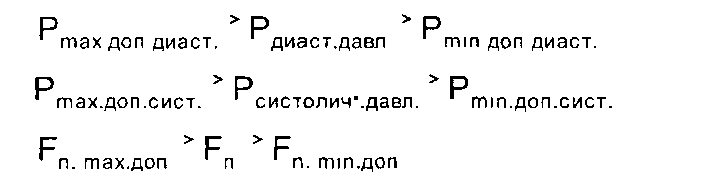
то подается управляющий сигнал, разрешающий запуск двигателя автомобиля.
Анализ качества управления проводится путем сравнения данных из блока памяти правил дорожного движения 40 и поступающих данных в устройство анализа дорожной обстановки 39. Реализованы подобные операции в известных существующих обучающих тренажерах для начинающих водителей.
Если водитель грубо нарушает правила дорожного движения (ПДД), соответствующие им рекомендации системы навигации GPS, то выдают управляющее воздействие на рулевое управление и тормоз, автомобиль вначале корректируется по маневру и скорости, а если нарушения правил дорожного движения - грубые, либо они повторяются, то автомобиль принудительно дистанционно паркуется в ближайшем подходящем месте, сообщают по системе передачи данных 21 в систему контроля 17 дорожной полиции для принятия адекватных мер. Это также позволит исключить аварии в случае резкого ухудшения здоровья водителя управляющего транспортным средством, например инсульта, инфаркта и т.д., а также террористов, самоубийц - из-за действий которых могут пострадать посторонние люди.
Перед началом движения - запуском двигателя автомобиля, производиться в салоне автомобиля тестирование водителя на наличие алкоголя и наркотических средств - и при их отсутствии двигатель заводится.
Улучшение работы системы достигают тем, что на автомобилях устанавливают навигаторы Системы спутниковой навигации (ССН) GPS, т.е. приемники ССН.
GPS-навигаторы работают от 24-х спутников системы глобального позиционирования Global Positioning System. Сигнал передается на открытой частоте, по которому GPS-навигаторы определяют координаты точки своего нахождения с точностью от (10-15) м - для военного применения и ~100 м - для гражданского. Наличие переотраженных радиоволн при их распространении в GPS системе может ухудшить точность измерения координат еще на 5 м.
Точности GPS, которая используется для гражданских целей, - достаточно для оценочной навигации, но не всегда достаточно для предотвращения столкновений ТС. Поэтому устанавливают в аварийно-опасных местах на высоте Н 2-3 излучателей местной системы, аналогичной GPS и называемой Regional Positioning System (RPS), определяемой из следующих формул.
Известно, что предельная дальность Rпред

для R=6.370 км, Hrps=36 м; ha=1 м
получим

(см. «Радиолокационные устройства. Теория и принципы построения». Под редакцией Григорина-Рябова М. Советское радио. 1970. с.194).
Таким образом, при подъеме антенны системы RPS на высоту 3 м, высоте расположения приемника система RPS ha=1 м (т.е. внутри автомобиля) получим радиус действия системы RPS в 39 км, что соответствует 2·Rпр.вид, т.к.диаметр равен 2-м радиусам. Т.о. примерно на 80 км получаем зону покрытия от одной станции RPS.
Принцип работы системы RPS в остальном не отличается от известных систем GPS, но т.к. дальность от передатчика RPS до приемников на ТС существенно меньше, то точность определения координат соответственно выше.
Таким образом, с помощью системы ССН GPS проводиться грубая навигация, а более точная для маневра автомобилей при интенсивном транспортном потоке используют наряду с данными других датчиков - систему точной навигации RPS.
Систему RPS можно устанавливать на уже существующих и установленных антеннах мобильных систем связи, которые уже сейчас перекрывают все общественно значимые дороги большинства стран мира.
Существенное влияние на исход реагирования на аварийные ситуации оказывает человеческий фактор, а именно состояние здоровья водителя, возможные ошибочные или неадекватные действия, запаздывание в принятии решения водителем транспортного средства в условиях недостатка времени и нервного стресса.
С целью снижения риска столкновений с наземными препятствиями, пешеходами, другими автомобилями и т.д. следует оперативно использовать на транспортном средстве всю доступную уже сегодня и дополнительную информацию об окружающей обстановке, ее анализа и принятия адекватного решения, направленного на достижение вышеуказанной цели.
В случае если устройство 39 - анализа дорожной обстановки и принятия решения о мерах пассивной и активной зашиты вырабатывает сигнал о включении соответствующих мер зашиты, то на устройство формирования управляющих сигналов 36 выдаются исполнительные сигналы подключения адекватных мер защиты, включая: рулевое управление, тормоза, блокировка двигателя, тормозных парашютов 11 (если транспортное средство движется по металлическим рельсам поезд, либо монорельсовый транспорт), на соответствующие подушки безопасности 1-10 (см. фиг.8).
Известно, что время наполнения газом подушки безопасности (ПБ) составляет около 20-50 миллисекунд, т.е. 20-50×10-3 сек (см. Florian Hessen. Retten und Bergen von Personen. Airbags ausgenustereugen 2001, №3, p.19). ПБ заполняется газом при подаче электрического импульса от соответствующего датчика удара. Накачивание подушки газом происходит автоматически, когда сила столкновения равна силе удара автомобиля о кирпичную стену со скоростью (16-26) км/час. В датчике происходит смещение массы, замыкается электрический контакт, зажигается пиросистема. Газ образуется и подается в подушку безопасности за счет химической реакции NaN3 с KNO3 в результате чего образуется газообразный азот N. Через некоторое время около 10 секунд, газ начинает просачиваться через крошечные отверстия в подушке безопасности, и она сдувается, и человек может двигаться. Современные подушки безопасности срабатывают быстрее, на их раскрытие уходит не более чем 20 мсек (см. http://www.jcwiki.ru/).
Известно, что при скорости от 32 до 128 км/час тормозной путь автомобиля составляет от 18 до 144 м. Недостаток известных систем - в случае появления пешехода перед автомобилем - он не всегда успеет затормозить, например, если пешеход появляется из-за невидимого препятствия (автобуса, другого автомобиля и т.д.) Если столкновение автомобиля с пешеходом, несмотря на все возможные меры предотвратить не удается, то активируют и подают сигналы управления с устройства формирования управляющих сигналов 36 на внешнюю воздушную подушку безопасности (ВВПБ), которая образует защитное и закрытое с боков ложе, по которому пешеход перемешается в сторону к лобовому стеклу, которое также защищено частью подушки безопасности, а при срабатывании датчика движения тела пешехода в обратном направлении формируют сигналы управления, при которых срабатывает верхняя внешняя подушка безопасности в виде клапана, которая закрывает вход в верхнюю воздушную подушку безопасности(ВВПБ) специальными защелками.
В ситуации когда определяют, что транспортное средство (автомобиль) начинает опрокидываться (переворачиваться), срабатывают устройство анализа дорожной обстановки и принятия решения формируют сигналы управления и надувают подушки безопасности (airbag) со всех сторон автомобиля - слева сзади, справа сзади, сверху, снизу, справа спереди и слева спереди - автомобиль оказывается внутри полого надутого куба огибающего форму автомобиля, состоящего из подушек безопасности.
Длину тормозного пути автомобиля в экстренных аварийных случаях, уменьшают дополнительно тем, что:
- выстреливают сзади автомобиля тормозные парашюты 11 увеличивая сопротивление воздуху;
- выпускают струю сжатого воздуха, аналогично реверсному режиму работы авиационных двигателей.
Подробное устройство известно (см. пат. 6191686 США, МПК B60Q 1/00. Gabriel Edwin Z.. N 09/406409; заявл. 27.09.1999; Опубл. 20.02.2001; НПК 340/435. Англ.). Это устройство обеспечивает снижение усилия удара при столкновении автомобилей на скоростных магистралях, и облегчает водителю автомобиля торможение за время, достаточное для предотвращения аварии. Торможение автомобиля осуществляется за счет струй воздуха высокого давления, выпускаемых из воздушных клапанов, установленных в передней части автомобиля, и создающих реактивную силу, снижающую скорость движения автомобиля. Струи воздуха также отталкивают встречный автомобиль, снижая тем самым силу удара, клапаны могут поворачиваться с использованием системы дистанционного сервопривода, обеспечивая возможность водителю направить воздушные струи в направлении встречного автомобиля. Струи воздуха могут выпускаться автоматически.
Реализация устройств распознавания различных типов 28, (см. фиг.8) подробно описана в работах [11-18].
Реализация устройства анализа дорожной обстановки описана в работах [15,16].
Остальные устройства в системе, изображенные на фиг.8, широко известны и описаны в соответствующей литературе.
Оценка эффективности системы распознавания определяет качество работы системы и способа предотвращения столкновения ТС с препятствиями. Оценить эту эффективность можно с помощью информационного подхода, который описан в работе (Небабин В.Г., Гришин В.К. Методы и техника радиолокационного распознавания. Современное состояние, тенденции развития, перспективы. Зарубежная радиоэлектроника. 1992, №10 с.5-20).
Заявляемые существенные отличия позволяют получить следующий технический результат - создать сингулярный способ предотвращения угона транспортного средства (ТС) и обеспечения безаварийного движения автомобиля или иного транспортного средства в различных аварийных ситуациях, включая: появление опасных гидрометеорологических явлений (бури, туман, гололед, снегопад, и т.д.), аварийные участки дорог, наличие на проезжей части дорог животных и птиц с защитой автомобиля, водителя автомобиля, пассажиров салона автомобиля и пешехода от гибели и тяжелых повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают доступ в автомобили водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. www.glonax.ru/principle
2. www.winxone.ru/articles/716/print/
3. www.ae-project.com/printsip-deistviya-gps-navigatora
4. www.avto-pulss.ru/sovet/457-kak-vybrat-navigator-dlya-avtomobilya.html
5. Смертельное ДТП на Николаевской дороге 04.10.2013 - Youtube www.youtube.com/watch?v=YsnbU0p37vY
6. На Фонтане машина такси сбила парня timer.od.ua/news/na_fontane_mashina_taksi_sbila_parnya_322.html
7. Autorambler.ru/journal/elevents/25.10.2013/560984990/?gcv_source=news_block_new
8. Ria.ru/society/20131023/972158817.html
9. www.utro.ru/articles/201311/07/1153207.shtml
10. http://qoverment.ru/meetinqs/5937/stenoqram
11. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.Радио и связь. 1984 г.
12. Nebabin V.G. Methods and Techniques of Radar Recognition. Boston-London. Artech House. 1995.
13. Multisensor Data Fusion and Applications. Paramond K. Varshney Siracuse University, New York. 13244. USA.
14. Патент США №7.102.496. МПК B60Q 1/00. Опубл. 05.09.2006. Multi-sensor integration for a vehicle.
15. Commercial motor Vehicle Safety and Security Systems. [http://www.fmcsa.dot.gov/facts-research/systems-technology/product-guides/collisi on-warning.htm]
16. Precrash System [http://en.wikipedia.org/ Precrash_System]
17. Нелинейные радиолокаторы и особенности их применения для поиска закладных устройств [www.bnti.ru/showart.asp?aid=839&/v/=04.01.02].
18. Емкостные датчики [prom.ua/p4283004-emkostnye-datchiki-turck.html].
19. Тензометрический датчик [ru.wikipedia.org/wiki/Тензометрический_датчик].
20. Датчики перемещения [www.sensor-svstems.ru/category_11.html].
21. Датчики силы. Тензодатчики [www.sensor-systems.ru/category 5.html?gclid=CJuXzs_71boCFcF2cAodxTQAeA].
22. Лобашев А.К., Лосев Л.С. Современное состояние и тактические возможности применения индикаторов электромагнитных излучений. / Специальная техника, 2004, №6.
23. Бузов Г.А., Лобашев А.К., Лосев Л.С.Современный взгляд на решение проблемы применения «легальных жучков». / Защита информации. Инсайд, 2005, №2.
24. Бузов Г.А., Лобашев А.К., Щербаков Д.А. Особенности обнаружения и идентификации закладных устройств с помощью «OSOR-5000». / Специальная техника, 2005, №4.
25. Бузов Г.А., Лобашев А.К., Щербаков Д.А. Применение «OSOR-5000» - проблемы и решения / Зашита информации. Инсайд, 2005, №4.
26. Лобашев А.К. Дифференциация поисковых подходов при выявлении службами безопасности закладных устройств. / Зашита информации. Инсайд, 2006, №5.
27. Кадры страшной аварии - погибли 18 человек «Русские дороги - аварии, дтп, видеорегистратор [rusdtp.ru/19906-kadry-strashnoy-avarii-pogibli-18-chelovek.html].
Оценка эффективности предлагаемого способа.
Достоинством информационного подхода является, во-первых, удобство и относительная простота его применения на практике, особенно при использовании в РЛС цифровых методов обработки и передачи информации (что позволяет упростить задание требований к быстродействию и объему памяти ЭВМ, а также к пропускной способности систем передачи данных); во-вторых, возможность сравнения различных систем радиолокационного распознавания. Например, по сравнению с вероятностными показателями качества информационный критерий, с одной стороны, позволяет сравнивать системы с показателями качества, полученными в различных условиях (с разным числом классов распознаваемых объектов, при разных значениях вероятности ошибочного распознавания и т.п.), а с другой стороны, он позволяет перейти от вероятностных показателей качества Рп.р. и Ро.р. к информационному показателю I*.
Информационный критерий имеет еще одно достоинство, поскольку при известных параметрах РЛС и распознаваемого объекта, он позволяет оценить показатель информативности РЛС в каждом конкретном случае. Рассмотрим показатели эффективности более подробно.
Эффективность систем автоматического распознавания объектов может характеризоваться как вероятностными параметрами - вероятностью обнаружения объекта, вероятностью правильного распознавания и вероятностью ложных тревог, так и информационным количеством информации, выдаваемой системой.
Вероятности правильного обнаружения Рп.о. и правильного распознавания Рп.р. определяются формулами

где Nп.о. и Nп.р. - число правильно обнаруженных и число правильно распознанных объектов, Nобщ - общее число объектов в заданном объеме.
Вероятность ложных тревог Рл.т. за обзор (кадр) определяется формулой

где Nп.ч.л.т - полное число ложных тревог и No.ч.и - общее число изображений в обзоре (кадре).
где Эср - средняя энергия распознаваемого сигнала; No - спектральная плотность мощности шума.
Выражение (1) справедливо при выполнении следующих условий: распознаваемые сигналы ui(t) удовлетворяют условию ортогональности  при l≠k; распознаваемые сигналы имеют одинаковую энергию; априорные вероятности распознаваемых сигналов равны, т.е. ненулевые сигналы равновероятны.
при l≠k; распознаваемые сигналы имеют одинаковую энергию; априорные вероятности распознаваемых сигналов равны, т.е. ненулевые сигналы равновероятны.
Если распознаваемые сигналы не перекрываются во времени или по частоте, выравниваются по энергии и отсутствует априорная информация о распознаваемых классах, то можно считать, что перечисленные условия удовлетворяются. Тогда после преобразований получаем

а вероятность правильного обнаружения с распознаванием

Если, например, распознавание осуществляется по дальностному портрету, то mc=nклnpβnpε, где nкл - число распознаваемых классов объектов; npβ и npε - количество ракурсов объектов соответственно по азимуту и углу места. Тогда количество информации

где ΔF - полоса частот РЛС; Т - время получения и обработки информации.
Так, например, если распознавание осуществляется по дальностному портрету, то

где nкл - число распознаваемых классов (типов) целей, а npβ и npε - число ракурсов объектов соответственно по азимуту β и углу места ε.
Минимальное количество информации I*, необходимое для распознавания десяти классов сигналов (т.е. mc=10) с Рпр=0,9 и Рор=0,1 при простом сигнале. Из фиг.8 по кривой 6 получаем значение qu=9,7, или 19,5 дБ. Далее, полагая ΔF=1/τи, Т=(2-3)/fмод, где ти - длительность зондирующих импульсов, fмод - минимальная частота модуляций отраженного сигнала, при котором осуществляется распознавание, при ти=10-6 с, fмод=2 Гц получаем ΔF=106 Гц, Т=(1-1,5) с. Тогда I*=ΔF·Т·log2[1+qu 2]=106·с-1·1c·log2[1+(9,7)2]≈6,6·106 бит. Для более высокого качества распознавания необходимо большое количество информации, т.е. большие значения параметров ΔF, Т и qu.
Способ осуществляют таким образом.
В транспортное средство, например, автомобиль, который оборудован всеми перечисленными выше приборами безопасности, садится водитель. Он кладет руки на руль, и приборы измеряют все необходимые параметры состояния его здоровья. Водитель вносит в систему навигации свой пункт назначения. Если все показатели здоровья в норме, водитель включает двигатель и автомобиль начинает двигаться в необходимом направлении. На дисплее постоянно изображается путь и все препятствия и аварийные участки дороги, наличие на проезжей части дороги животных и птиц. Если препятствия появляются так, что ТС не успевает затормозить или совершить маневр, то возможная активация подушек безопасности в зависимости от вышерассмотренных ситуаций.
Структурная схема, реализующая заявляемый способ приведена на фиг.8, где:
1-10 - подушки безопасности автомобиля
11 - тормозной парашют
12 - спутниковая система навигации GPS
13 - система местной навигации RPS
14 - метео РЛС
15 - гидрометеоцентр
16 - система передачи данных
17 - система контроля за дорожным движением
18 - приемник гидрометеоинформации
19 - навигатор GPS
20 - приемник системы RPS
21 - система передачи данных СПД
22 - акустические датчики
23 - датчик движения тела пешехода в обратном направлении
24 - транспортное средство
25 - дисплей автомобиля
26 - система обработки информации
27 - РЛС
28 - устройство комплексирования данных и распознавания объектов
29 - контроль биометрических данных
30 - система объективного контроля - регистратор данных
31 - ИК-датчики
32 - водитель автомобиля
33 - видеокамеры
34 - блок контроля состояния здоровья водителя
35 - органы управления автомобиля: рулевое управление, тормоза, блокировка двигателя
36 - устройство формирования управляющих сигналов
37 - горизонтальный выстреливаемый пиропатроном телескопический поддон
38 - вертикальный выстреливаемый пиропатроном телескопический поддон
39 - устройство анализа дорожной обстановки и принятия решения о мерах пассивной и активной безопасности
40 - блок памяти правил дорожного движения
41 - датчик обнаружения посторонних закладных устройств
42 - датчик угона автомобиля
43 - датчик обнаружения потенциально-опасных предметов на дороге
44 - автономные излучатели пешеходов
Таким образом, заявляемый способ позволяет учитывать все возможные ситуации при движении транспортного средства и обеспечивает его безаварийность в тех ситуациях, которые в существующих способах не учитываются.
При обеспечении безаварийного движения автомобиля в аварийных ситуациях исключают доступ в автомобили водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем. Перед запуском двигателя и во время движения контролируют биометрические данные водителя и состояние здоровья водителя. В случае ухудшения здоровья водителя формируют исполнительный сигнал, блокирующий включение двигателя. Паркуют принудительно автомобиль в безопасном месте, блокируют двигатель, передают информацию об этом в пункт оказания скорой медицинской помощи. Принимают данные спутниковой навигации, определяют местоположение автомобиля. Принимают информацию об участке дороги с помощью датчиков различных диапазонов волн. Распознают потенциально опасные объекты. Отображают на дисплее автомобиля полученную информацию, а также информацию об опасных метеоявлениях вместе с анализом дорожной обстановки. При невозможности предотвращения столкновения автомобиля с пешеходом задействуют внешнюю подушку безопасности в виде конуса или эллипсоида. При срабатывании датчика движения тела пешехода в обратном направлении формируют сигналы управления, при которых срабатывает другая подушка безопасности, которая предотвращает вылет пешехода на дорогу. Устанавливают на пешеходах автономные излучатели электромагнитных волн. Во время движения производят контроль функционирования основных устройств автомобиля. В случае обнаружения неисправностей формируют соответствующие сигналы, и если водитель не устраняет их, паркуют автомобиль в безопасном месте, выключают двигатель, включают аварийную сигнализацию, передают сигнал бедствия в пункт дорожной полиции. Во время движения автомобиля постоянно производят оценку возможного столкновения с другим автомобилем. В случае превышения допустимой вероятности производят индикацию об этой опасности водителю. В случае его неправильной реакции автомобиль принудительно паркуют в безопасное место, блокируют двигатель, передают информацию об этой предпосылке в дорожную полицию. Достигается безаварийное движение транспортного средства. 4 з.п. ф-лы, 9 ил.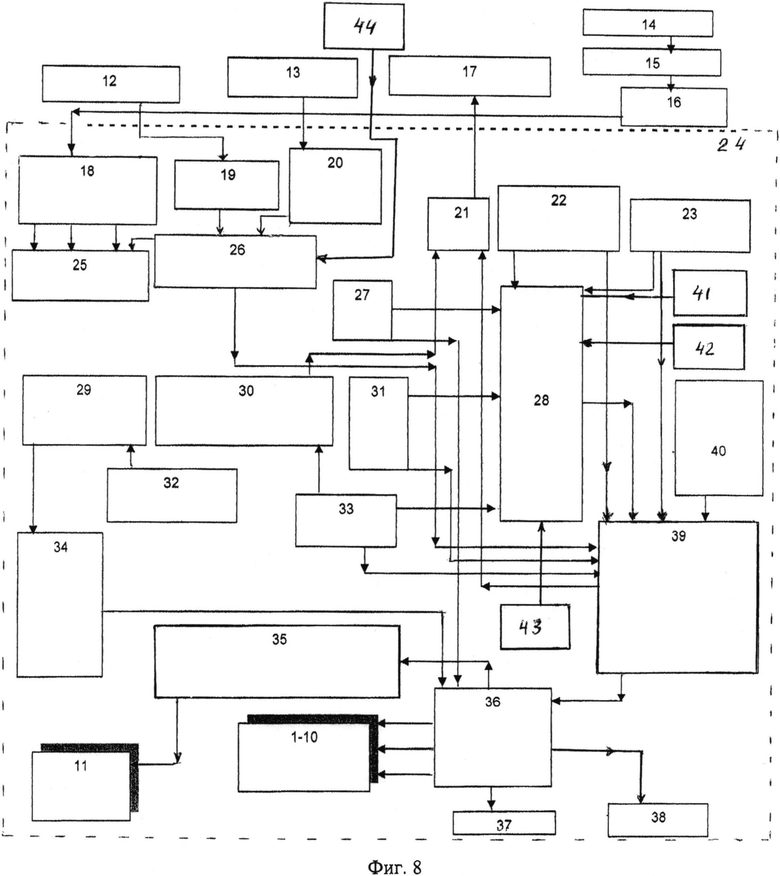
1. Сингулярный способ обеспечения безаварийного движения автомобиля путем постоянного контроля движения автомобиля в различных аварийных ситуациях, включая: появление опасных гидрометеорологических явлений (бури, ливни, туман, гололед, снегопад), аварийные участки дорог, наличие на проезжей части дорог животных и птиц с защитой автомобиля, водителя автомобиля, пассажиров салона автомобиля и пешехода от гибели и тяжких повреждений, в чрезвычайных условиях, когда столкновение автомобиля с пешеходом невозможно предотвратить, при этом исключают доступ в автомобили водителей, состояние здоровья которых не позволяет безаварийно управлять автомобилем, содержащий следующие этапы: постоянно принимают данные спутниковой навигации, определяют местоположение автомобиля, принимают информацию об участке дороги с помощью датчиков различных диапазонов волн, комплексируют эти данные, распознают потенциально опасные объекты, отображают на дисплее автомобиля полученную информацию, с учетом дорожной обстановки, а перед запуском двигателя контролируют биометрические данные водителя и состояние здоровья водителя, и если оно отличается от порогового значения, и на наличие алкоголя, то формируют исполнительный сигнал, блокирующий включение двигателя, принимают информацию об опасных метеоявлениях из гидрометеоцентров и отображают ее на дисплее автомобиля вместе с анализом дорожной обстановки, при этом при невозможности предотвращения столкновения автомобиля с пешеходом активируют и формируют и подают сигналы управления на внешнюю воздушную подушку безопасности (ВВПБ), отличающийся тем, что ВВПБ выполняют в виде надувного полого мешка, имеющего форму сачка, длиной большей чем длина самого автомобиля, при этом ширина входного отверстия ВВПБ больше ширины автомобиля, что обеспечивает защиту пешехода при боковом столкновении с пешеходом, а ВВПБ для обеспечения жесткости снизу укрепляют с помощью выдвигаемых горизонтального и вертикального телескопических поддонов(ВТП), а сами поддоны находятся до аварийной ситуации в сложенном состоянии соответственно на крыше и в багажнике автомобиля, при этом в аварийной ситуации, когда избежать столкновения автомобиля с пешеходом не удается, ВВПБ и ВТП срабатывают одновременно, либо автоматически от сигнала управления, либо в ручном режиме путем выдачи сигнала от специальной кнопки от водителя, управляющего автомобилем, при этом пешеход перемещается внутри ВВПБ, и если пешеход перемещается в обратном направлении, срабатывает датчик движения тела пешехода в обратом направлении и тем самым надувают внешнюю воздушную подушку безопасности в виде клапана закрывающего вход ВВПТ, чем предотвращают выпадение пешехода из ВВПБ, при этом пешеход совершает колебательные движения в ВВПБ и расходует на них кинетическую энергию, которую он получил при столкновении с автомобилем, тем самым спасают его от повреждений и гибели, а на пешеходах для большего их различения устанавливают автономные излучатели электромагнитных волн (ЭМВ), при этом дополнительно определяют перед началом и в ходе движения перед и под автомобилем потенциально опасные объекты на дороге в виде: острых предметов, могущих повредить шины, посторонние предметы: камни, кирпичи, открытые канализационные люки, ямы, а также посторонние потенциально опасные объекты, такие как мины под днищем автомобиля, при этом перед началом и во время движения автомобиля производят контроль функционирования основных устройств автомобиля, таких как двигатель, попадание в него воды, тормозной системы, состояние колодок и наличие в ней тормозной жидкости, наличие топлива, крепление колес, и в случае обнаружения неисправностей формируют соответствующие сигналы, и если водитель не устраняет их, то автомобиль принудительно паркуется в безопасном месте, двигатель выключается, включается аварийная сигнализация и передается сигнал бедствия в пункт дорожной полиции и (либо) на станцию технического обслуживания, а во время движения автомобиля постоянно производят оценку возможного столкновения автомобиля с другим автомобилем и в случае превышения допустимой вероятности производят индикацию об этой опасности - водителю, а в случае его неправильной реакции автомобиль принудительно паркуется в безопасное место, двигатель блокируется и передается информация об этой предпосылке к дорожно-транспортному происшествию (ДТП) в дорожную полицию, а также не только перед началом, но и во время движения у водителя контролируют состояние здоровья, и если оно отличается от порогового значения, тем более, если оно резко ухудшилось (инсульт, инфаркт), то формируют исполнительный сигнал, которым автомобиль принудительно паркуют в безопасное место, двигатель блокируется и передается информация об этом в пункт оказания скорой медицинской помощи и в дорожную полицию.
2. Способ по п. 1, отличающийся тем, что в качестве автономных излучателей электромагнитных волн (ЭМВ) пешеходов используют мобильные телефоны, введением дополнительного режима, когда периодически излучают ЭМВ в виде кодированных последовательностей, позволяющих идентифицировать пешехода и его координаты.
3. Способ по п. 1, отличающийся тем, что в качестве автономных излучателей ЭМВ используют спутниковые навигаторы пешеходов путем введения в них дополнительного режима, когда периодически излучают ЭМВ в виде кодированных последовательностей, позволяющих идентифицировать пешехода и его координаты.
4. Способ по п. 1, отличающийся тем, что для придания жесткости внешней воздушной подушке безопасности (ВВПБ) используют прочные дуги, которые в свернутом состоянии находятся вместе с ВВПБ, а при раскрыве ВВПБ, дуги- переводят вертикальное состояние.
5. Способ по п. 1, отличающийся тем, что в случае ДТП или угона автомобиля, из него передают информацию на систему контроля за дорожным движением о ДТП или угоне автомобиля, например в дорожную полицию: VIN-код автомобиля, госномер, данные о владельце и его средствах связи (мобильном телефоне) и координатах, на которых он оставил автомобиль, при этом постоянно анализируют координаты стоянки автомобиля в системе спутниковой навигации, и(или) если они изменяются вследствие несанкционированного перемещения самого автомобиля либо с помощью другого автомобиля, например эвакуатора, либо срабатывает датчик несанкционированного проникновения в автомобиль, то передают владельцу автомобиля и в систему контроля за дорожным движением полиции сигнал о попытке угона соответствующего автомобиля.
| 2011 |
|
RU2501679C2 | |
| WO2007132642A1, 22.11.2007 | |||
| СПОСОБ ЗАЩИТЫ АВТОМОБИЛЯ И ПЕШЕХОДА ПРИ АВТОМОБИЛЬНОЙ АВАРИИ | 2003 |
|
RU2261187C2 |

