Изобретение относится к области судостроения и судовождения, а именно в потенциально опасных аварийных ситуациях. Например, итальянский суперлайнер "Costa Concordia" в ночь на субботу 14.01.2012 г. сел на мель близ острова Джило (Gilio) у побережья Тосканы (Италия). Длина пробоины около 70 м. Погибли несколько десятков человек. Материальные потери более 500 млн евро. И таких аварий в мире постоянно происходит множество.
Основная версия аварии этого судна, которое оснащено самым современным навигационным оборудованием: оно столкнулось с рифами, которые не обозначены на навигационных картах.
Предупреждение столкновения судов с потенциально опасными объектами регламентируется в настоящее время Международными правилами предупреждения судов (МППС).
Для предупреждения столкновения морских судов решаются графические задачи на морских картах. Судоводитель делает план обсерваций, оценку навигационной безопасности. Для удобства работы судоводителя строится графический план перехода.
Проводится мониторинг (контроль) подводных потенциально опасных объектов (ППОО) с целью внесения в реестр ППОО согласно ГОСТ Р22.0.09 Безопасность в чрезвычайных ситуациях. Чрезвычайные ситуации на акваториях. Термины и определения. Государственный стандарт РФ от 25.05.1995 г.
Причина потенциальных аварий судов: судоводитель при управлении надводным (подводным) судном пользуется картами с нанесенными на них островами, скалами и т.д., и в случае ошибочных действий судоводителя или при наличии не нанесенных на карты рифов, скал, затопленных кораблей и иных мешающих предметов происходят тяжелые катастрофы с гибелью людей, повреждением или утоплением надводных (подводных) судов. К подводным потенциально опасным объектам (ПОО), которые могут представлять опасность для судов, могут быть отнесены как статические, т.е. не изменяющиеся во времени, так и динамические, т.е. изменяющиеся во времени. Например, подводные рифы, затонувшие суда, особенно недавно затонувшие или перемещаемые подводными течениями, затонувшие рыболовецкие сети, подводные лодки, изменившийся фарватер реки и т.д.
Характеристика аналогов
В работе [1, с.210] описана электронная отображающая карты информационная система - ЭКДИС, (ECDIS - Electronic Chart Display and Information System), в которой может отображаться и подводная обстановка. Эта обстановка синтезируется на основании гидрографических карт с использованием программного обеспечения для анализа и визуализации трехмерных данных, например, с помощью приложения Асе Scene.
В работе [1, с.45] отмечается, что реально качество многих карт, используемых для судовождения, не удовлетворяет требованиям пользователей. Ошибки таких реальных карт могут достигать 2,5 миль, а иногда и 7 миль.
Все это требует для повышения безопасности плавания судов иметь более точную подробную оперативную непрерывно обновляемую информацию непосредственно в районе плавания судна.
Сейчас перед плаванием судоводитель подбирает морские карты района плавания с нанесенными на них подводными и надводными препятствиями.
Во время плавания судна информацию над поверхностью моря судоводитель получает с помощью радиолокационных станций (РЛС), автоматической идентификационной системы (АИС), а под поверхностью моря с помощью морских карт района плавания, т.е. в статике. Иногда на современных судах для целей определения глубины между килем судна и дном акватории используют эхолоты. Но эхолот обладает ограниченными возможностями, он не позволяет получать информацию спереди судна и с боков судна.
Для навигации также используют автоматический курсопрокладчик, компас, гирокомпас, спутниковую навигационную систему.
Характеристика прототипа
В работе [14] описана базовая интегрированная автоматизированная навигационная система БИАНС для морских судов различного назначения, в том числе арктического плавания „Созвездие", ОАО „Концерн"ЦНИИ Электроприбор, г.Санкт-Петербург, Россия, 197046, ул.Малая Пасадская, 30, Ю.П.Белоус, 2011 г, office@eprib.ru(812)232-33-76.
БИАНС включает в себя навигационный эхолот ЭН200. Навигационный эхолот предназначен для точного измерения, наглядного представления, регистрации и передачи в другие системы данных о глубине под килем судна (особенно на мелководье) в диапазоне от 1 м до 200 м с отображением результатов на индикаторе глубины, с регистрацией профиля дна на бумажной ленте и выдает сигнал тревоги - алармы: аудиовизуальная сигнализация в случаях: 1) опасная глубина, 2) потеря дна. Точность измерения глубины ±2,5% [14].
Критика прототипа
Судоводитель полагается при управлении судном на ранее полученную до него информацию о подводных и надводных потенциально опасных объектах (ПОО. И у него нет источника достаточно полной объективной достоверной текущей информации о ПОО во время управления судном в движении и динамике. И судоводителя призывают к использованию: организационных мероприятий, интуиции и так называемой хорошей морской выучки.
Цель изобретения
Заявляемые существенные отличия позволяют повысить вероятность безаварийного движения надводного и подводного судна в различных потенциальных опасных аварийных ситуациях при наличии подводных и надводных потенциально опасных объектов, в том числе, когда столкновение судна с ПОО невозможно в обычных условиях предотвратить с помощью маневра.
Характеристика изобретения
На фиг.1 изображена структурная схема системы, реализующей заявляемый способ. Для достижения этой цели на судне устанавливается, кроме эхолота, определяющего только расстояние от киля до дна моря, гидролокаторы кругового обзора. А если судно имеет большие размеры, то устанавливают гидролокаторы в задней и передней полусфере, а также по левому и правому бортам. Это позволит получать точную, подробную и оперативную трехмерную информацию впереди, сзади, слева и справа от движущегося судна. В случае обнаружения и распознавания подводных мешающих объектов, которые угрожают безопасности плавания судна, выдается предупредительный звуковой сигнал, а в случае необходимости - соответствующее управляющее воздействие на рулевой механизм судна, чтобы избежать столкновения с ПОО, при этом с помощью ЭВМ выбирают оптимальный способ предотвращения столкновения судна с ПОО и рассчитывают траекторию уклонения от ПОО.
Если избежать столкновения с ПОО не удается путем маневра судна, то используют дополнительные операции, а именно используют водометные струи под большим давлением под водой для исключения запутывания гребного винта в рыболовных сетях, а также в месте возможного столкновения борта судна с ПОО срабатывают воздушные подушки (airbag), аналогичные автомобильным. А чтобы исключить крен судна на одну сторону, с обратной стороны судна симметрично срабатывают такие же воздушные подушки.
Устройства комплексирования данных и распознавания объектов подробно описаны в работах [17, 18, 19]. Водометы 31 описаны в работах: www.jet42.ru, boat.ru, www.podvesniki.ru/jets.htm. Датчики радиоактивного излучения 32 также широко известны и описаны: cxem.net,
www.strf.ru/material.aspx?Catalog=222&d_no=18610.
Остальные устройства в системе, изображенные на фиг.1, широко известны и описаны в соответствующей литературе [1-16].
Оценка эффективности системы
Оценить эту эффективность можно с помощью информационного подхода, который описан в работе [21]. Рассмотрим более подробно этот подход.
Достоинством информационного подхода является, во-первых, удобство и относительная простота его применения на практике, особенно при использовании в датчиках информации: РЛС, ГЛС и т.д. цифровых методов обработки и передачи информации (что позволяет упростить задание требований к быстродействию и объему памяти ЭВМ, а также к пропускной способности систем передачи данных); во-вторых, возможность сравнения различных систем распознавания.
Например, по сравнению с вероятностными показателями качества предлагаемый информационный критерий, с одной стороны, позволяет сравнивать системы с показателями качества, полученными в различных условиях (с разным числом классов распознаваемых объектов, при разных значениях вероятности ошибочного распознавания и т.п.), а с другой стороны, он позволяет перейти от вероятностных показателей качества Рп.р.Ро.р. к информационному показателю I*.
Информационный критерий имеет еще одно достоинство, поскольку при известных параметрах датчиков информации: РЛС, ГЛС и т.д. и распознаваемого объекта он позволяет оценить показатель информативности источников информации в каждом конкретном случае.
Рассмотрим показатели эффективности более подробно.
Эффективность систем автоматического распознавания объектов может характеризоваться как вероятностными параметрами - вероятностью обнаружения объекта, вероятностью правильного распознавания и вероятностью ложных тревог, так и информационным количеством информации, выдаваемой системой.
Вероятности правильного обнаружения Рп.о и правильного распознавания Рп.р определяются формулами
Рп.о=Nп.o/Nобщ, Рп.р=Nп.p/Nобщ
где Nп.o и Nп.p - число правильно обнаруженных и число правильно распознанных объектов, Nобщ - общее число объектов в заданном объеме. Вероятность ложных тревог Рд.т за обзор (кадр) определяется формулой
Рл.т=Nп.ч.л.т/Nо.ч.и,
где Nп.ч.л.т - полное число ложных тревог и Nо.ч.и - общее число изображений в обзоре (кадре).
Информационный подход позволяет сравнить системы автоматического распознавания объектов, распознающие разное количество объектов с разными показателями качества. Согласно полученным данным (см. Небабин В.Г. Выбор параметров РЛС для распознавания. Радиотехника. Москва. 1990. №5, с.16-18) количество информации I*, необходимое для распознавания, определяется выражением:

где ΔF - полоса частот РЛС; Т - время получения и обработки информации; 
Так, например, если распознавание осуществляется по дальностному портрету, то mc=nкл·npβ·npε,
где nкл - число распознаваемых классов (типов) целей, а npβ и npε - число ракурсов объектов соответственно по азимуту β и углу места ε.
Минимальное количество информации I*, необходимое для распознавания десяти классов сигналов (т.е. mc=10) с Рпр=0,9 и Рор=01 при простом сигнале. Из фиг.2 по кривой 6 получаем значение qu=9,7 или 19,5 дБ.
Далее, полагая ΔF=l/τи, Т=(2-3)/fмод, где τи - длительность зондирующих импульсов, fмод - минимальная частота модуляций отраженного сигнала, при котором осуществляется распознавание, при τи=10-6 с, fмод=2 Гц получаем ΔF=106 Гц, Т=(1-1,5) с. Тогда 
Заявляемый способ и система, его реализующая, для обеспечения гарантированного безаварийного движения судна в различных аварийных ситуациях работает таким образом.
На судно, которое оборудовано перечисленными выше приборами безопасности, судоводитель вносит в систему конечный пункт назначения, включает двигатель и судно начинает двигаться в необходимом направлении. На дисплее постоянно изображается путь и все препятствия и аварийные участки пути, наличие на пути потенциально опасных объектов. Если препятствия появляются мгновенно и маневром избежать столкновения не удается, то выдается сигнал активизации наружных подушек безопасности или водометов.
Известно, что время наполнения газом подушки безопасности (ПБ) составляет около 20-50 миллисекунд, т.е. (20÷50)×10-3 с [23]. ПБ заполняется газом при подаче электрического импульса от соответствующего датчика из устройства формирования управляющих сигналов 28, фиг.1. Накачивание подушки газом происходит автоматически, когда замыкается электрический контакт, зажигается пиросистема. Газ образуется и подается в подушку безопасности за счет химической реакции NaN3 с KNO3, в результате чего образуется газообразный азот N2. Через некоторое время (около 10 с), газ начинает просачиваться через крошечные отверстия в подушке безопасности и она сдувается. Современные подушки безопасности срабатывают быстрее, на их раскрытие уходит не более чем 20 млс [24].
Возможны вариации со времени сдувания ПБ.
Структурная схема системы обеспечения гарантированного безаварийного движения надводного или подводного судна в различных аварийных ситуациях, а особенно при наличии подводных и надводных потенциально опасных объектов, приведена на фиг.1 где:
1 - метеоРЛС;
2 - спутниковая навигационная система (СНС), типа GPS, ГЛОНАСС;
3 - автоматическая идентификационная система (АИС);
4 - система контроля за движением судов;
5 - гидрометеоцентры;
6 - судно;
7 - приемник спутниковой навигационной системы;
8 - приемник гидрометеоинформации;
9 - бортовой блок АИС;
10 - дисплей;
11 - система обработки информации;
12, 12а - система передачи данных;
13 - эхолот, измеряющий глубину под килем судна;
14 - гидролокационные станции;
15 - радиолокационные станции;
16 - устройство комплексирования данных и распознавания объектов;
17 - гирокомпас,
18 - система объективного контроля (регистратор) данных.
19 - инфракрасные датчики;
20 - блок памяти правил движения судов;
21 - надводные видеокамеры;
22 - подводные видеокамеры;
23 - устройство определения скорости судна (лаг);
24 - устройство анализа обстановки и принятия решения о мерах пассивной и активной защиты судна;
25 - устройство управления курсом судна;
26 - устройство управления режимами работы двигателей судна;
27 - наружные подушки безопасности судна;
28 - устройство формирования управляющих сигналов;
29 - магнитный компас;
30 - устройство управления водометами.
Литература
1. Вагущенко Л.Л., Стафеев A.M. Судовые автоматизированные системы навигации. М.: Транспорт 1989 г. - 158 с.
2. Демиденко П.П. Судовые радиолокационные и радионавигационные системы. Одесса. Феникс. 2009 - 368 с.
3. Вагущенко Л.Л. Судовые навигационно-информационные системы. Одесса. Феникс. 2004 - 303 с.
4. Вильский Г.Б., Мальцев А.С, Бездольный В.В.. Гончаров Е.И. Навигационная безопасность при лоцманской проводке судов Николаев-Одесса. Феникс. 2007 - 456 с.
5. Мальцев А.С., Май Б.Л. Устройство для предупреждения столкновения судов. АС №622275 А, МПК G08G 3/02. Опубликовано БИ №12, приоритет от 15.12.2003 г.
6. Харин В.М., Занько О.Н, Декин Б.Г., Писклов В.Т. Судовые машины, установки, устройства и системы. М.: Транслит. 2010 - 646 с.
7. Бронштейн Д.Я. Устройство и основы теории судна. Л.: Судостроение. 1988 - 336 с.
8. Рябченко В.К., Кучер Ю.Л. Устройство судна. Одесса. Феникс. 2006 - 118 с.
9. Фрид Е.Г. Устройство судна. Л.: Судостроение. 1989 - 340 с.
10. Вагущенко Л.Л., Вагущенко А.Л. Поддержка решений по расхождению с судами. О. Феникс 2010 - 294 с.
11. Мальцев А.С. Маневрирование судов при расхождении. Одесса. ОНМА. 2008 - 232 с.
12. Дыба В.Г., Позолотин Л.А., Чистяков В.Л. Управление безопасностью судна. Одесса. Автограф. 2004 - 334 с.
13. Снопков В.И. Управление судном М. Транспорт. 1991 - 360 с.
14. www.mir-forum.ru/files/materials/sozvezdie.pdf. Судовые системы. 2011.
15. ГОСТ Р22.0.09. Безопасность в чрезвычайных ситуациях на акваториях. Термины и определения. Государственной стандарт РФ от 25.05.1995.
16. Патент РФ №2318187 от 15.06.2006. ОАО ЦНИИ „Курс" Устройство для проведения судна (УПС) по узким участкам фарватера.
17. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь. 1984.
18. Nebabin V.G. Methods and Techniques of Radar Recognition. Boston-London. Artech House. 1995.
19. Multisensor Data Fusion and Applications. Paramond K. Varshney Siracuse University, New York. 13244. USA.
20. Патент США №7.102.496. МПК B60Q 1/00. Опубл. 05.09.2006. Multi-sensor integration for a vehicle.
21. Небабин В.Г., Гришин В.К. Методы и техника радиолокационного распознавания. Современное состояние, тенденции развития, перспективы. Зарубежная радиоэлектроника. 1992, №10 с.5-20.
22. Небабин В.Г. Выбор параметров РЛС для распознавания. Радиотехника. Москва. 1990. №5, с.16-18.
23. Fiorian Hessen. Retter und Bergen von Personen. Airbags ausgenustereugen 2001, №3, р.19).
24. http://www.jcwiki.ru/

Изобретение относится к области судостроения и судовождения. Способ обеспечения безаварийного движения надводного или подводного судна при наличии подводных и надводных потенциально опасных объектов включает постоянный прием спутниковых навигационных данных, данных от радиолокационной станции, автоматической идентификационной системы, определение местоположения судна, вычисление скорости судна, глубины под килем. Дополнительно включают операции, согласно которым получают трехмерное изображение подводной обстановки со всех сторон судна, спереди, с боков и сзади, для чего используют гидролокаторы в передней, задней, левой и правой областях, в случае обнаружения потенциально опасных объектов распознают их либо самим судоводителем, либо распознающим устройством и выбирают оптимальный способ предотвращения столкновения судна с потенциально опасным объектом и рассчитывают траекторию уклонения от потенциально опасного объекта. Повышается вероятность безаварийного движения надводного и подводного судна в различных потенциальных опасных аварийных ситуациях. 2 з.п. ф-лы, 2 ил.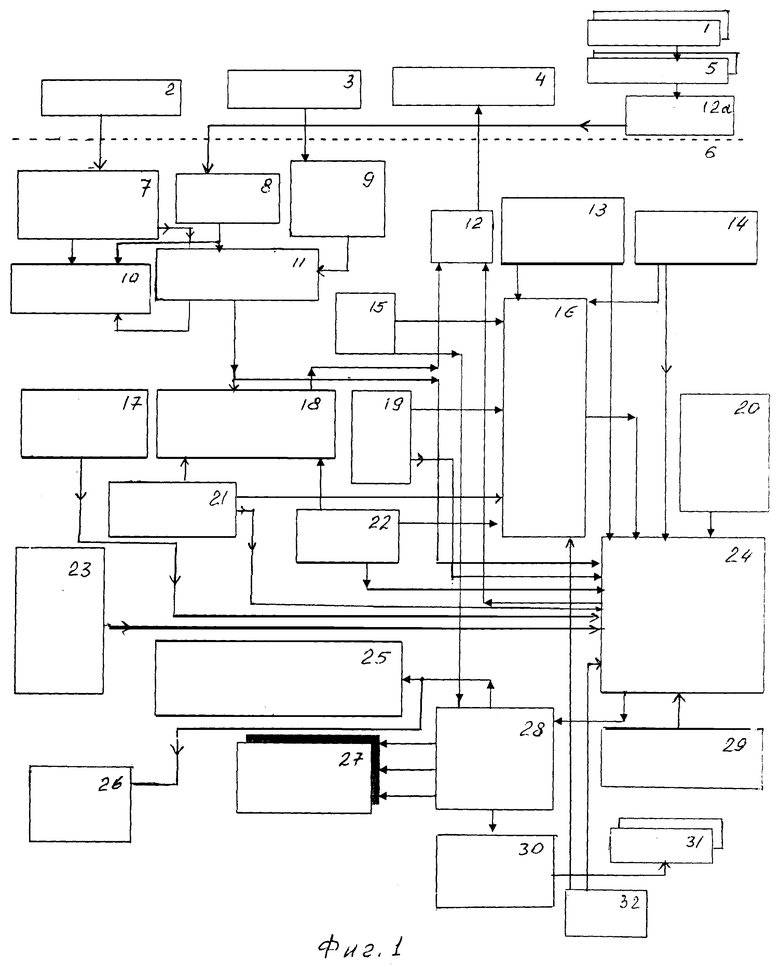
1. Способ обеспечения безаварийного движения надводного или подводного судна при наличии подводных и надводных потенциально опасных объектов, включающий постоянный прием спутниковых навигационных данных, данных от радиолокационной станции, автоматической идентификационной системы, определение местоположения судна, вычисление скорости судна, глубины под килем, отличающийся тем, что с целью повышения вероятности предотвращения столкновения надводного или подводного судна в акватории с подводными и надводными потенциально опасными объектами дополнительно выполнены следующие операции: получают трехмерное изображение подводной обстановки не только под килем судна, но и со всех сторон судна спереди, с боков и сзади, для этого используют гидролокаторы в передней, задней, левой и правой областях, в случае обнаружения потенциально опасных объектов распознают их либо самим судоводителем, либо распознающим устройством и выбирают оптимальный способ предотвращения столкновения судна с потенциально опасным объектом и рассчитывают траекторию уклонения от потенциально опасного объекта.
2. Способ по п.1, отличающийся тем, что в случае, если потенциально опасный объект обнаружен и распознан в непосредственной близости от судна и избежать столкновения простым маневрированием невозможно, используют пассивную защиту в виде наружных воздушных подушек на корпусе судна, надуваемых в месте возможного столкновения судна с потенциально опасным объектом, который предварительно определяют; при этом, чтобы исключить крен судна на одну сторону, с обратной стороны судна симметрично срабатывают такие же воздушные подушки.
3. Способ по п.1, отличающийся тем, что в случае, если потенциально опасный объект обнаружен и распознан в непосредственной близости от судна и избежать столкновения простым маневрированием невозможно, используют активную защиту в виде водяных струй под большим давлением под водой.
| Ю.П.БЕЛОУС "БАЗОВАЯ ИНТЕГРИРОВАННАЯ АВТОМАТИЗИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МОРСКИХ СУДОВ РАЗЛИЧНОГО НАЗНАЧЕНИЯ, В ТОМ ЧИСЛЕ АРКТИЧЕСКОГО ПЛАВАНИЯ "СОЗВЕДИЕ", ОАО КОНЦЕРН "ЭЛЕКТРОПРИБОР", 2011; | |||
| ЭЛЕКТРИЧЕСКАЯ ПЕЧЬ ТРУБЧАТОГО ТИПА | 1949 |
|
SU78954A1 |
| Способ регенерации диметилформамида и препарата ОП10 | 1953 |
|
SU99887A1 |
| JP 2009058246 A, 19.03.2009 | |||

