Изобретение относится к области арматуростроения, а именно к управлению трубопроводной арматурой (ТПА), и может быть использовано в качестве исполнительного механизма для управления неполноповоротной ТПА, в частности шаровых кранов.
Известен привод для неполноповоротной арматуры, содержащий спироидную передачу и ограничитель хода, обеспечивающие управление краном шаровым (см. каталог фирмы ООО «Механик», г. Ижевск, типа РЗА-С http://www.mechanik.udmnet.ru/images/stories/ctig 2013/pdf.)
Недостатком данного привода является высокая металлоемкость и необходимость ввода регулирующих ограничителей хода.
Известен также неполноповоротный привод (см. Ромашин Р.В. Полноповоротный привод для шаровых кранов // Электронный научный журнал «Нефтегазовое дело». Уфа, 2008 12, рис. 5 http://ogbus.ru/authors/Romashin/Romashin_1.pdf ) прототип, содержащий неподвижный корпус с размещенным в нем адаптером с наклонным пазом, взаимодействующим с роликом управляемым приводом, при этом наклонные пазы выполняют роль ограничителя хода.
Недостатками данного привода являются большие высотные габариты.
Технической задачей настоящего изобретения является снижение высотных характеристик привода, а значит, снижение металлоемкости.
Поставленная техническая задача решается следующим образом, неполноповоротный ручной привод для трубопроводной арматуры, содержащий управляемый запорным органом трубопроводной арматуры и охватываемый неподвижным корпусом с наклонным пазом адаптер, взаимодействующий с ведущим роликом, при этом ролик закреплен на ходовой гайке, управляемой шпинделем, причем ролик одновременно взаимодействует с двумя разнонаправленными наклонными пазами как корпуса, так и адаптера, при этом в кольцевой канавке адаптера закреплен стопор, взаимодействующий с двумя регулируемыми упорами, размещенными в корпусе, а наклонные пазы либо в корпусе, либо в адаптере, либо в обеих деталях выполнены с различными углами наклона к вертикальной оси, либо криволинейными с изменяющимися по длине углами наклона, при этом ролик снабжен двумя автономными подшипниками качения.
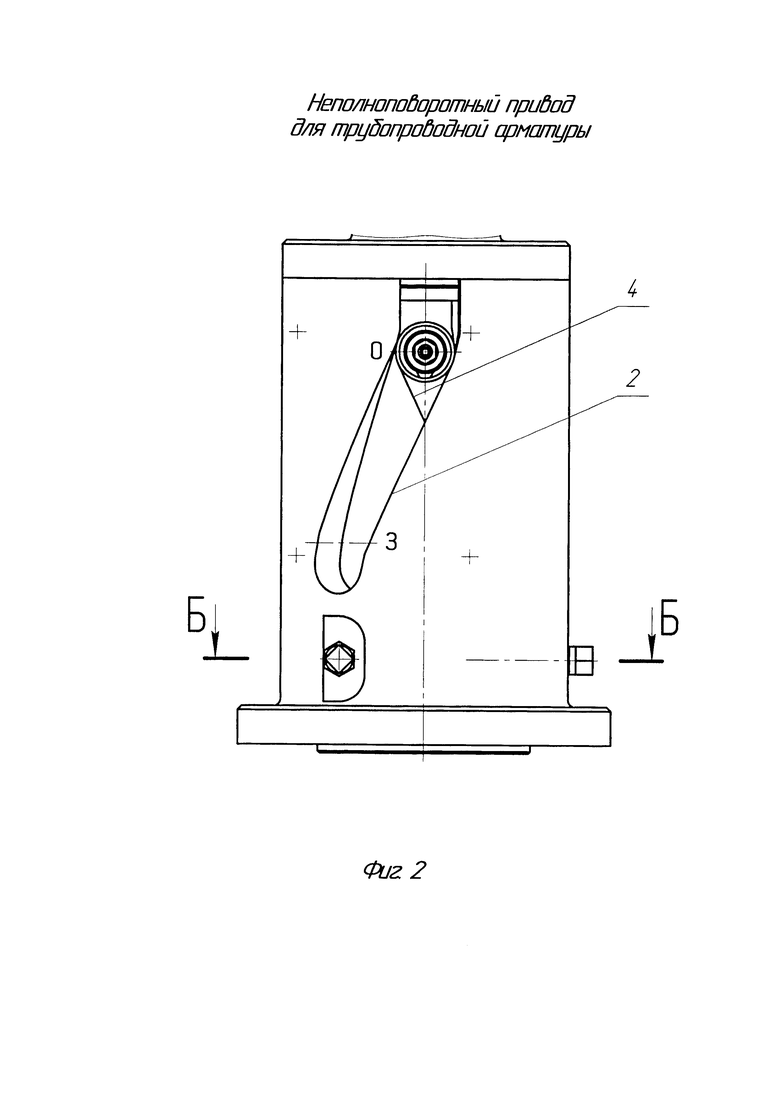
На фиг. 1 изображен неполноповоротный ручной привод для трубопроводной арматуры с четвертным разрезом; на фиг. 2 - вид А на фиг.1; на фиг. 3 - разрез по Б-Б на фиг. 2; на фиг. 4 - вариант выполнения наклонного паза на фиг. 2.
Неполноповоротный ручной привод для трубопроводной арматуры состоит из корпуса 1 с наклонным пазом 2, коаксиально в корпусе 1 размещен адаптер 3 с наклонным пазом 4, упомянутые пазы 2 и 4 взаимодействуют с ведущим роликом 5, выполненным на ходовой гайке 6, управляемой через маховик 7 ходовым винтом 8, установленным в опоре 9 в адаптере 3 и опоре 10 в съемной крышке 11.
При этом на наружной поверхности адаптера 3 выполнена кольцевая канавка 12, в которой закреплен стопор 13, взаимодействующий в конечных положениях запорного органа трубопроводной арматуры с регулируемыми ограничителями хода 14 и 15, установленными в корпусе 1. На наружной поверхности корпуса 1 возле наклонного паза 2 нанесена маркировка «О» открыто, и «З» закрыто.
Неполноповоротный ручной привод для трубопроводной арматуры работает следующим образом.
Трубопроводная арматура, например, шаровой кран, находится в положении открыто. Торец ролика 5 находится возле маркировки «О» на корпусе 1. При повороте маховика 7 по часовой стрелке винт 8 перемещает ходовую гайку 6 с роликом вниз к маркировке «З» на корпусе 1. При этом ролик 5, скользя по наклонному пазу 2, воздействует на адаптер 3, поворачивая его. Но так как в последнем выполнен также наклонный паз 4, но противоположного направления, то углы поворота относительно вертикальной оси корпуса 1 суммируются, а упор 13 от регулируемого ограничителя 15 поворачивается до регулируемого ограничителя 14, при этом торец ролика 5 перемещается к маркировке «З» на корпусе 1.
Регулируемыми ограничителями 15 и 14 достигается полнопроходность шарового крана, то есть проходной канал шаровой пробки совпадает с проходным каналом корпуса, а при закрытии крана шаровая пробка полностью перекрывает проходной канал в корпусе.
Открытие шарового крана происходит в обратной последовательности. Так как трение покоя всегда больше трения движения, то требуется для страгивания шаровой пробки приложение к маховику 7 большего усилия. Выполнение же наклонных пазов 2 и 4 (одного или обоих) с различными углами наклона к вертикальной оси привода, то есть α1>α2, позволит практически, не меняя прилагаемого усилия к маховику 7 управлять шаровым краном.
При этом размещение на ролике 5 двух игольчатых подшипников способствует уменьшению прилагаемого усилия к маховику, так как не только переводит трение движения в трение качения, но и позволяет управлять одновременно двумя пазами 2 и 4, несмотря на то, что взаимодействие ролика 5 с последними образует противоположное вращение.
Таким образом, благодаря тому, что один ролик управляет двумя разнонаправленными наклонными пазами, позволяет за более короткий по высоте наклонный канал повернуть запорный орган трубопроводной арматуры на 90º, а значит, значительно снизить не только габариты привода, но и его металлоемкость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Неполноповоротный ручной привод для трубопроводной арматуры | 2020 |
|
RU2760078C1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| Универсальная гидравлическая зажимная установка - стенд для позиционирования и герметизации фланцевой трубопроводной арматуры с настраиваемой системой зажима | 2022 |
|
RU2818609C2 |
| РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ С УКАЗАТЕЛЕМ ПОЛОЖЕНИЯ ЗАПОРНОГО ОРГАНА | 2008 |
|
RU2378557C2 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ С УКАЗАТЕЛЕМ ПОЛОЖЕНИЯ ЗАПОРНОГО ОРГАНА | 2007 |
|
RU2373449C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| ШАРОВОЙ КРАН-КЛАПАН | 2019 |
|
RU2720061C1 |
| ЗАМКОВОЕ УСТРОЙСТВО ЗАТВОРА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2188979C1 |
| УНИВЕРСАЛЬНЫЙ КЛИНОВОЙ ЗАТВОР | 2002 |
|
RU2238464C2 |



Изобретение относится к области арматуростроения, а именно к управлению трубопроводной арматурой(ТПА), и может быть использовано в качестве исполнительного механизма для управления неполноповоротной ТПА, в частности шаровых кранов. Неполноповоротный ручной привод для трубопроводной арматуры содержит управляемый запорным органом трубопроводной арматуры и охватываемый неподвижным корпусом с наклонным пазом адаптер. Указанный адаптер взаимодействует с ведущим роликом. При этом ролик закреплен на ходовой гайке управляемым шпинделем. Причем ролик одновременно взаимодействует с двумя разнонаправленными наклонными пазами как корпуса, так и адаптера. При этом в кольцевой канавке адаптера закреплен стопор, взаимодействующий с двумя регулируемыми упорами, размещенными в корпусе. Наклонные пазы либо в корпусе, либо в адаптере, либо в обеих деталях выполнены с различными углами наклона к вертикальной оси, либо криволинейными с изменяющимися по длине углами наклона. При этом ролик снабжен двумя автономными подшипниками качения. Изобретение направлено на снижение высотных характеристик привода, а значит, снижение металлоемкости. 2 з.п. ф-лы, 4 ил.
1. Неполноповоротный ручной привод для трубопроводной арматуры, содержащий управляемый запорным органом трубопроводной арматуры и охватываемый неподвижным корпусом с наклонным пазом адаптер, взаимодействующий с ведущим роликом, отличающийся тем, что ролик закреплен на ходовой гайке, управляемой шпинделем, причем ролик одновременно взаимодействует с двумя разнонаправленными наклонными пазами как корпуса, так и адаптера, при этом в кольцевой канавке адаптера закреплен стопор, взаимодействующий с двумя регулируемыми упорами, размещенными в корпусе.
2. Неполноповоротный ручной привод для трубопроводной арматуры по п. 1, отличающийся тем, что наклонные пазы либо в корпусе, либо в адаптере, либо в обеих деталях выполнены с различными углами наклона к вертикальной оси, либо криволинейными с изменяющими по длине углами наклона.
3. Неполноповоротный ручной привод для трубопроводной арматуры по п. 1, отличающийся тем, что ролик снабжен двумя автономными подшипниками качения, например игольчатыми.

