Заявляемая группа изобретений относится к медицине и медицинской технике, а именно к неврологии, и предназначено для реабилитации пациентов с патологией моторных функций нижних конечностей. Одно из изобретений "механотренажер" предназначено для использования в другом, представляющим собой "комплекс роботизированный медицинский для реабилитации нижних конечностей".
На сегодняшний день актуальна задача социальной адаптации инвалидов и лиц, страдающих нарушениями опорно-двигательного аппарата, требующая расширения арсенала средств реабилитации. "Комплекс роботизированный медицинский для реабилитации нижних конечностей «РЛ - НК»" (идентично: "Реабилитационный комплекс для нижних конечностей"), частью которого является механотренажер, предназначен для проведения механотерапии при реабилитации пациентов, утративших двигательную функцию в результате нарушений (травм) неврологического или ортопедического характера. При лечении нижних конечностей с помощью комплекса мышечная система испытывают существенно меньшие нагрузки, чем при лечебной физкультуре, и сопровождается менее выраженными болезненными ощущениями. Комплекс может найти применение на ранних сроках после возникшей патологии центральной, периферической нервной системы или опорно-двигательного аппарата, проводимой путем лечебной гимнастики с помощью сгибающего и разгибающего механотренажера. В частности, комплекс может быть использован, преимущественно, после травм; заболеваниях ортопедической направленности; парезах (частичных параличах, которые проявляются в ослаблении функций органа); после хирургических операций, когда нужно восстановить функции организма; болезнях сердца, легких и других внутренних органов; заболеваниях неврологического характера. Восстановление двигательной функции достигается благодаря тонизирующему и трофическому (замещающему) воздействию на опорно-двигательный аппарат человека, формированию функциональных компенсаций.
Известен аппарат для восстановления подвижности коленного и тазобедренного суставов человека, содержащий неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на основании, трансмиссию, два ложемента и опору для стопы, аппарат содержит микроконтроллер, датчик положения, концевые выключатели и узел управления реверсивным электроприводом, трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов, причем коромысла жестко связаны со вторыми звеньями четырехзвенных механизмов, смежных с первыми звеньями, ложемент голени закреплен на раме, ложемент бедра закреплен на третьих звеньях, смежных с первыми звеньями и связанных через четвертые звенья со вторыми звеньями, рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения в радиальном направлении относительно оси ходового винта, на основании установлены концевые выключатели, на четырехзвенный механизм установлен датчик положения, микроконтроллер связан с узлом управления реверсивным электроприводом, а концевые выключатели связаны с микроконтроллером. Устройство содержит панель управления, на которой расположены связанные с микроконтроллером индикатор текущего значения угла сгибания и установленных значений минимального и максимального углов сгибания, регулятор минимального угла сгибания, регулятор максимального угла сгибания, регулятор выдержки при максимальном угле сгибания, регулятор скорости изменения угла сгибания и регулятор начальной установки угла сгибания. Устройство содержит также выносной пульт экстренного отключения электропривода (RU 2307638).
Известен аппарат для механотерапии нижних конечностей, содержащий неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, два параллельно расположенных коромысла, шарнирно закрепленные на основании, трансмиссию, выполненную в виде двух связанных и параллельно расположенных четырехзвенных механизмов, ложемента голени, закрепленного на раме, ложемента бедра, закрепленного на звеньях четырехзвенных механизмов, датчик угла, два концевых выключателя, узел управления реверсивным электроприводом, микроконтроллер, выносной пульт экстренного отключения электропривода и панель управления, причем рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения по направляющей вдоль оси ходового винта, концевые выключатели, установлены на основании, датчик угла установлен на четырехзвенный механизм, вход узла управления реверсивным электроприводом, датчик угла, концевые выключатели, выносной пульт экстренного отключения электропривода и панель управления подключены к микроконтроллеру, выход узла управления электроприводом подключен к реверсивному электроприводу, аппарат содержит генератор зондирующего тока, первый и второй токовые электроды, первый и второй измерительные электроды, усилитель биоэлектрических сигналов, синхронный детектор, аналого-цифровой преобразователь, компьютер, монитор врача, монитор пациента и звуковоспроизводящее устройство, причем генератор зондирующего тока подключен к микроконтроллеру и связан с первым и вторым токовым электродами, расположенными на грудной клетке пациента, первый и второй измерительные электроды, расположенные на грудной клетке пациента, соединены с входом усилителя биоэлектрических сигналов, выход которого соединен с сигнальным входом синхронного детектора, вход синхронизации которого подключен к микроконтроллеру, выход синхронного детектора подключен через аналого-цифровой преобразователь с микроконтроллеру, к микроконтроллеру подключен персональный компьютер, связанный с монитором врача, монитором пациента и звуковоспроизводящим устройством. При этом первый и второй измерительные электроды расположены между первым и вторым токовыми электродами (RU 2698853).
Недостатками известных устройств RU 2307638, RU 2698853 являются низкая эргономичность, ограниченность функциональных возможностей при взаимодействии пациента с персоналом, обусловленная неподвижным исполнением основания, недостаточная анатомическая приспособленность для проведения процедур в щадящем мягко протекающем режиме, и сложность большого количества аппаратуры системы управления с прецизионным потенциометрическим датчиком положения, индикатором и группой регуляторов, не обеспечивающих обратной связи непосредственно по биологическим сигналам состояния мышц реабилитируемой конечности, а также возможность нарушения плавности движений сгибания-разгибания из-за неустойчивой формы равновесия прямолинейных звеньев, что ведет к быстрой утомляемости у пациента.
Использование в составе известных устройств RU 2307638, RU 2698853 прямолинейных стержневых звеньев, у которых размеры поперечного сечения малы по сравнению с длиной, при сочетании сжатия (растяжения) и изгиба в двух плоскостях, т.е. возникновения косого изгиба, увеличивает вероятность нарушения продольной устойчивости этих звеньев. Такие явления могут сопровождаться рассогласованием движения и рывками шарнирно-рычажных механизмов, возникновением автоколебаний, формированием мертвого положения и заклинивания шарнирно-рычажных механизмов которые связаны с тем, что не все звенья механизмов могут быть надежно уравновешены и все время неизбежно имеются какие - то внешние возмущающие воздействия, порождающие не плавность хода шарнирно-рычажного механизма. К этим возмущениям относятся как возмущения вызванные электродвигателем, так и возмущения, вызванные рабочим процессом изменения направления движения сгибания-разгибания, происходящим в трансмиссии, когда появление переменной составляющей движущего момента в любом шарнирном соединении может неблагоприятно сказаться на плавности и устойчивости работе трансмиссии. Несогласованные движения могут формировать патологические проявления системы двигательных координаций и, тем самым, тормозить процесс нейропластичности и препятствовать эффективной реабилитации.
Кроме того, прямолинейной формой замыкающих звеньев обусловлена высокая вероятность образования острого угла между кромками пары звеньев и ложементов, исходящими из точки их наложения, что увеличивает риск попадания и зажатия между звеньями посторонних предметов, т.е., если звенья прямые, то они, как ножницы, образуют острый угол, который может что-то зажать и деформировать, а также травмировать пациента и персонал.
Известен роботизированный реабилитационный комплекс для восстановления функций нижних конечностей. Это роботизированная система, которая переучивает мозг пациента, используя принципы биологически обратной связи, нейропластичности и повторяющихся движений. Благодаря индивидуально подобранным программам реабилитации, пациенты могут улучшить диапазон, скорость, точность, плавность движений, мышечную силу и когнитивные функции (https://lyadov-clinic.ru/catalog/robotizirovannyy-kompleks-reoambulator/).
Такой комплекс имеет ограниченные функциональные возможности и лишен мобильности, т.е. требует, как правило, доставки пациента к нему.
Известен реабилитационный комплекс (роботизированный) для нижних конечностей, содержащий размещенные на мобильной платформе программируемый блок запуска и контроля режимов реабилитации и механотренажер с рамой, установленной с возможностью поперечного перемещения на основании, регулируемом по высоте относительно платформы, при этом механотренажер включает в себя связанный каналом связи с блоком запуска и контроля режимов реабилитации регистрирующий блок обработки сигналов датчиков биоэлектрических сигналов напряжения мышц и фонового биоэлектрического сигнала, а также продольный привод поступательного перемещения, связанный трансмиссией с каркасом ложа для размещения реабилитируемой нижней конечности, образованным из последовательно размещенных ложемента бедра и ложемента голени, выполненных в виде рамок, интегрированных в кинематическую цепь одного из шарнирно-рычажных механизмов трансмиссии механотренажера, расположенных с двух сторон от продольного привода поступательного перемещения, двигатель которого связан с блоком запуска и контроля режимов реабилитации, а каретка шарнирно соединена с ведущим звеном трансмиссии, шарнирно сопряженным с обоими шарнирно-рычажными механизмами трансмиссии с возможностью преобразования поступательного перемещения каретки в поворотное движение ложементов бедра и голени для циклического сгибания и разгибания размещенной на них реабилитируемой конечности (RU 2703838).
Недостатками известного устройства RU 2703838 являются недостаточные эргономичность и анатомическая приспособленность, ограниченность функциональных возможностей для сопряжения с индивидуальным местом расположения пациента, поскольку мобильная платформа (тележка) не позволяет ставить платформу вплотную к любой кровати/кушетке, независимо от того, есть ли под ней свободной пространство для заведения колес, в этом случае может отсутствовать возможность регулировки по высоте и возможность адаптировать высоту аппарата под любую кровать/кушетку, удаленность экрана дисплея для пациента, неоптимальность состава и конфигурации звеньев шарнирно-рычажных механизмов относительно ложементов бедра и голени для обеспечения ограждения трансмиссии, достижения максимальной плавности перемещения и нагружения реабилитируемой конечности при преобразовании движения каретки в поворотное движение рамок ложементов бедра и голени,, а также ограниченность возможностей уравновешивания, сопряжения и синхронизации шарнирно-рычажных механизмов.
Известное устройство одним или двумя колесами платформы должно заводится под кровать, чтобы ставится вплотную, что часто невозможно в палате. Мобильность и форма платформы известных устройств требует, стационарного размещения их в отдельных помещениях, а также дополнительного перемещения пациентов, возможного, как правило, только после вертикализации. Существующие мобильные платформы для нижних конечностей представляют из себя тележку или столик, на которых перевозится механотренажер, с последующим размещением его на кровати пациента за счет физического усилия медицинского персонала, создавая при этом риски травматизма как для персонала (травмы позвоночника при поднятии тяжелых грузов, травмы ног при падении груза), так и для пациентов - как при падении механотренажера на пациента, так и при падении мехаотренажера с кровати (в особенности опасного при зафиксированной ноге пациента).
Техническая проблема, на решение которой направлена заявляемая группа изобретений, объединенных единым творческим замыслом, заключается в расширении арсенала технических средств для реабилитации нижних конечностей повышении эффективности их использования.
Технический результат, достигаемый при использовании заявляемой группы изобретений, объединенных единым творческим замыслом, заключается в реализации ее назначения - осуществление реабилитации нижних конечностей, достигаемый за счет создания альтернативных имеющимся конструктивных решений реабилитационного комплекса и механотренажера для него, обладающей улучшенными показателями эргономики и функционирования, позволяющими применять их с высокой эффективностью в условиях постельного режима.
Высокая эффективность обеспечивается заявляемыми устройствами благодаря оптимальной конфигурации Т-образной мобильной платформы и ложементов бедра и голени механогтренажера, а также составу, форме и целесообразной схеме шарнирных соединений и замыкающих звеньев. В ней практически исключены условия для формирования мертвых положений, возникновения автоколебаний, а также нарушения плавности траектории и скорости перемещения нагружаемой конечности при синхронном преобразовании движения каретки в поворотное движение рамок ложементов бедра и голени, интегрированных в рычажно-шарнирные механизмы, все звенья которых могут быть практически надежно уравновешены. Кроме того, тангенциальная составляющая, способствующая повороту ложементов изменяется плавно, так как плавная с перегибом форма замыкающих звеньев обеспечивает минимальное значение переменной составляющей движущего момента в любом шарнирном соединении при завершении сгибания и начале разгибания конечности, а возможность увеличения угла, образованного касательными к кромкам замыкающих звеньев и ложементов, исходящими из точки их наложения, целесообразна для уменьшения риска попадания и зажатия парами звеньев посторонних предметов. Образуемый при этом тупой угол наименее способен что-то зажать. Таким образом, конструкция уменьшает такие риски и является фактором анатомической приспособленности для проведения процедур в щадящем мягко протекающем режиме.
Возможность регулировки положения комплекса посредством электропривода, поворотных колес и направляющих не требует от медсестры существенных усилий, позволяет одновременно контролировать положение Т-образной платформы (тележки) и пациента и выставлять аппарат в требуемом месте с минимальным перемещением пациента и без его непосредственного участия (без усилия со стороны пациента). Это очень важно на ранних этапах, когда любая повышенная физическая нагрузка опасна для пациента (разойдутся швы и т.п). То есть заявленная группа изобретений позволяет с высокой точностью манипулировать положением аппаратуры относительно пациента без существенных физических усилий, тем самым реализуется высокая степень автоматизации и роботизации. Также это позволяет жестко фиксировать аппарат относительно пациента и кровати без возможности его случайного смещения или падения с кровати, что исключает данный риск травматизма как для пациента, так и для медицинского персонала.
Сущность изобретения в части реабилитационного комплекса для нижних конечностей заключается в том, что реабилитационный комплекс для нижних конечностей, содержащий размещенные на мобильной платформе (1) блок (23) запуска и контроля режимов реабилитации, размещенный на стойке, и механотренажер с рамой (7), установленной с возможностью поперечного перемещения на основании (3), регулируемом по высоте относительно платформы (1), при этом механотренажер включает в себя связанный каналом связи с блоком (23) запуска и контроля режимов реабилитации блок (33) обработки биосигналов датчика (26) биоэлектрических сигналов напряжения мышц и датчика (27) фонового биоэлектрического сигнала, а также продольный привод поступательного перемещения, связанный с каркасом ложа для размещения реабилитируемой нижней конечности (32) трансмиссией, шарнирно-рычажные механизмы которой расположены с двух сторон от продольного привода поступательного перемещения, приводной двигатель (9) которого связан с блоком (23) запуска и контроля режимов реабилитации, а каретка (14) - с ведущим звеном (41) трансмиссии, сопряженным с обоими шарнирно-рычажными механизмами,
при этом мобильная платформа (1) выполнена Т-образной в конфигурации, образованной поперечной балкой (50) и продольной балкой, расположенной вдоль основания (3) мобильной платформы (1) и снабженной, по меньшей мере, одним колесом (2) на свободном конце, при этом поперечная балка (50) снабжена парой колес (2), установленных на ее концах.
Предпочтительно, мобильная платформа (1) снабжена стойкой (42), соединенной ребрами жесткости с балками мобильной платформы (1).
Предпочтительно, блок (23) запуска и контроля режимов реабилитации выполнен с сенсорным дисплеем (24), который установлен на стойке (42) мобильной платформы (1) с помощью шарнира (13) с возможностью поворота для визуального доступа экрана дисплея (24) для пациента.
Предпочтительно, основание (3) мобильной платформы (1) и рама (7) механотренажера снабжены линейными направляющими (8) с возможностью поперечного перемещения рамы (7) с механотренажером.
Предпочтительно, ложе для размещения реабилитируемой нижней конечности (32) снабжено поперечными параллельными ламелями (45) из эластичного материала с мягкими прокладками.
Предпочтительно, мобильная платформа (1) оснащена подъемным устройством для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1).
В частных случаях реализации подъемное устройство для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1) выполнено с телескопическим электромеханическим приводом (6) подъемного устройства и с механизмом адаптации положения основания (3), образованным шарнирно установленными криволинейными коромыслами (4) для регулирования положения основания (3) с рамой (7) по высоте.
В иных частных случаях реализации подъемное устройство для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1) выполнено с пневматическим или гидравлическим сервоприводом или, по, меньшей мере, одной телескопической колонной.
Предпочтительно, шарнирно-рычажные механизмы трансмиссии механотренажера снабжены каждый первым и вторым замыкающими звеньями (43, 44), выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено (43) выполнено с шарнирами на концах и с промежуточным шарниром, а второе замыкающее звено (44) - с шарнирами на концах, причем первое и второе замыкающие звенья (43, 44) установлены с обеих наружных сторон трансмиссии и связаны шарнирами на своих концах с каркасом ложа для размещения реабилитируемой нижней конечности (32) и с рамой (7) механотренажера.
Предпочтительно, каркас ложа для размещения реабилитируемой нижней конечности (32) образован из ложемента (19) бедра и ложемента (15) голени, выполненных в виде рамок из шарнирно связанных между собой встречными концами их боковых звеньев (52, 53),
Предпочтительно, первое и второе замыкающие звенья (43,44) и боковые звенья (52) ложемента (19) бедра и боковые звенья (53) ложемента (15) голени выполнены в виде пластин, ориентированных вертикально между замыкающими звеньями (43,44),
Предпочтительно, комплекс снабжен ложементом (17) стопы и присоединительным элементом для монтажа ложемента (17) стопы, выполненным в виде панели (46), соединенной переставляемыми винтами (16) с боковыми звеньями (53) ложемента (15) голени.
Предпочтительно, ложемент (17) стопы со стороны размещения подошвы стопы снабжен ремнями (47) фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагрузки на стопу из группы, включающей: реверсивный электродвигатель (36) ложемента (17) стопы для попеременного нагружения пятки и/или носка, и, по меньшей мере, один съемный датчик (39) ложемента 17 стопы для измерения усилия нагружения стопы, электрически связанными с блоком (23) запуска и контроля режимов реабилитации.
Предпочтительно, продольный привод поступательного перемещения выполнен в виде винтовой передачи с ходовым винтом (11) и с гайкой (12), соединенной с кареткой (14) для перемещения на резьбе ходового винта (11), приводной двигатель (9) продольного привода поступательного перемещения выполнен в виде реверсивного шагового электродвигателя, сопряженного с ходовым винтом (11), каретка (14) которого шарнирно соединена с ведущим звеном (41) трансмиссии, при этом приводной двигатель (9) продольного привода поступательного перемещения сопряжен с ходовым винтом (11) винтовой передачи соединительным устройством из группы: муфта (10), волновая передача, ременная передача.
Предпочтительно, блок (23) запуска и контроля режимов реабилитации и блок (33) обработки биосигналов датчика (26) регистрации биоэлектрических сигналов напряжения мышц и датчика (27) регистрации фонового биоэлектрического сигнала, связаны между собой по проводному или беспроводному каналу связи, при этом комплекс снабжен выносным пультом (25) аварийного выключения приводного двигателя (9) продольного привода поступательного перемещения, электрически связанным с блоком (23) запуска и контроля режимов реабилитации, выполненным с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
Предпочтительно, комплекс снабжен микроконтроллером (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения, а также концевыми выключателями (20), установленными с возможностью взаимодействия с кареткой (14), и блоком (21) управления приводным двигателем (9) привода поступательного перемещения для передачи на блок (23) запуска и контроля режимов реабилитации и на микроконтроллер (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения информации о положении каретки (14) привода поступательного перемещения.
Предпочтительно, концевые выключатели (20), выносной пульт (25) аварийного выключения, приводной двигатель (9) привода поступательного перемещения, реверсивный электродвигатель (36) ложемента (17) стопы, датчик (39) ложемента 17 стопы для измерения усилия нагружения стопы, датчик (26) регистрации биоэлектрических сигналов напряжения мышц и датчик (27) регистрации фонового биоэлектрического сигнала, а также блок (21) управления приводным двигателем 9 привода поступательного перемещения электрически скоммутированы с микроконтроллером (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения, который связан по проводному или беспроводному каналу связи с блоком (23) запуска и контроля режимов реабилитации, причем микроконтроллер (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления приводным двигателем (9) привода поступательного перемещения и реверсивным электродвигателем (36) ложемента (17) стопы в случае потери связи или выхода из строя блока (23) запуска и контроля режимов реабилитации.
Предпочтительно, блок (23) запуска и контроля режимов реабилитации выполнен с возможностью формирования базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками
Сущность изобретения в части Механотренажера реабилитационного комплекса для нижних конечностей, содержащий размещенный на раме (7) продольный привод поступательного перемещения, связанный трансмиссией с каркасом ложа для размещения реабилитируемой нижней конечности (32), образованным из шарнирно связанных между собой ложемента (19) бедра и ложемента (15) голени, интегрированных в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от продольного привода поступательного перемещения, приводной двигатель (9) которого связан с кареткой (14) шарнирно соединенной с ведущим звеном (41) трансмиссии, сопряженным с обоими шарнирно-рычажными механизмами трансмиссии, при этом:
- шарнирно-рычажные механизмы снабжены каждый первым и вторым замыкающими звеньями (43, 44), выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено (43) выполнено с шарнирами на концах и с промежуточным шарниром, а второе замыкающее звено (44) - с шарнирами на концах, причем первое и второе замыкающие звенья (43, 44) установлены с обеих наружных сторон трансмиссии и соединены между собой с помощью промежуточного шарнира первого замыкающего звена (43), сопряженного с одним из шарниров второго замыкающего звена (44), другой шарнир которого соединен с ложементом (19) бедра, а первое замыкающее звено (43) соединено шарнирами на своих концах с ложементом (15) голени и с рамой (7).
Предпочтительно, каркас ложа для размещения реабилитируемой нижней конечности (32) образован из ложемента (19) бедра и ложемента (15) голени, выполненных в виде рамок из шарнирно связанных между собой встречными концами их боковых звеньев (52, 53), при этом
- ложемент (15) голени выполнен в виде рамки, образованной из звеньев, из которых средние звенья (54) жестко соединены между собой и с ведущим звеном (41) трансмиссии, а два боковых звена (53) расположены параллельно и выполнены каждое с шарниром на конце и со средним шарниром, расположенным между ними, причем каждое боковое звено (53) соединено шарниром на своем конце с боковым звеном (52) ложемента (19) бедра, а средним шарниром - с одним концом первого замыкающего звена (43),
- ложемент (19) бедра выполнен в виде рамки, образованной из звеньев, средние из которых расположены с образованием перемычки (51), а два параллельных боковых звена (52) выполнены с шарнирами на своих концах, и соединены каждое одним из этих шарниров с боковым звеном (53) ложемента (15) голени, а вторым сопряжено с шарниром на конце второго замыкающего звена (44), другой конец которого сопряжен с промежуточным шарниром первого замыкающего звена (43), шарнирно закрепленного на раме (7) своим концом, противоположным концу, сопряженному со средним шарниром бокового звена (53) ложемента (15) голени.
Предпочтительно, первое и второе замыкающие звенья (43, 44) и боковые звенья (52) ложемента 19 бедра и боковые звенья (53) ложемента (15) голени выполнены в виде пластин, ориентированных в вертикально между замыкающими звеньями (43, 44), а боковые звенья (52, 53) ложементов (15, 19) голени и бедра снабжены поперечными параллельными ламелями (45) из эластичного материала с мягкими прокладками.
Предпочтительно, механотренажер снабжен ложементом (17) стопы и присоединительным элементом для монтажа ложемента (17) стопы к механотренажеру, выполненным в виде панели (46), соединенной переставляемыми винтами (16) с боковыми звеньями (53) ложемента (15) голени.
Предпочтительно, ложемент (17) стопы со стороны размещения подошвы стопы снабжен ремнями (47) фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагружения стопы из группы, включающей: реверсивный электродвигатель (36) ложемента (17) стопы для попеременного нагружения пятки и/или носка, и, по меньшей мере, один съемный датчик (39) ложемента 17 стопы для измерения усилия нагружения стопы.
Предпочтительно, механотренажер дополнительно содержит блок (33) обработки биосигналов датчика (26) регистрации биоэлектрических сигналов напряжения мышц и датчика (27) регистрации фонового биоэлектрического сигнала, выполненных в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани бедра реабилитируемой конечности (32), снабженных эластичной фиксирующей манжетой (29), выполненной с возможностью переустановки указанных датчика (26) регистрации биоэлектрических сигналов напряжения мышц и датчика (27) регистрации фонового биоэлектрического сигнала на реабилитируемой конечности (32).
Предпочтительно, механотренажер снабжен, по меньшей мере, одной группой дополнительных датчиков (26) регистрации биоэлектрических сигналов напряжения мышц и датчиков (27) регистрации фонового биоэлектрического сигнала, регистрации биоэлектрических сигналов напряжения мышц и фонового биоэлектрического сигнала в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани реабилитируемой конечности (32), снабженных эластичной фиксирующей манжетой (29), выполненной с возможностью переустановки дополнительных датчика (26) регистрации биоэлектрических сигналов напряжения мышц и датчика (27) регистрации фонового биоэлектрического сигнала, на реабилитируемой конечности (32), и, по меньшей мере, одним датчиком физиологического состояния пациента из группы: датчики температуры, пульса и давления.
Предпочтительно, продольный привод поступательного перемещения выполнен в виде винтовой передачи с ходовым винтом (11) и с гайкой (12), соединенной с кареткой (14), для перемещения на резьбе ходового винта (11), приводной двигатель (9) продольного привода поступательного перемещения выполнен в виде реверсивного шагового электродвигателя, сопряженного соединительным устройством с ходовым винтом (11) винтовой передачи, снабженной концевыми выключателями (20), установленными с возможностью взаимодействия с кареткой (14) продольного привода поступательного перемещения, которая шарнирно соединена с ведущим звеном (41) трансмиссии с возможностью преобразования поступательного перемещения каретки (14) продольного привода поступательного перемещения в поворотное движение боковых звеньев (52,53) ложементов (15,19) голени и бедра, причем приводной двигатель (9) продольного привода поступательного перемещения соединен с ходовым винтом (11) винтовой передачи соединительным устройством из группы: муфта (10), волновая передача, ременная передача.
Предпочтительно, механотренажер выполнен с возможностью размещения рамы (7) на основании (3) мобильной платформы (1), образованной из двух балок, соединенных между собой с образованием Т-образной в плане конфигурации, снабженной стойкой (42), оснащенной поперечными линейными направляющими (8) для рамы (7) и подъемным устройством для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1), а также имеет блок (23) запуска и контроля режимов реабилитации выполненный с сенсорным дисплеем (24), который установлен на стойке (42) мобильной платформы (1) с помощью шарнира (13), с возможностью поворота и визуального доступа экрана дисплея (24) для пациента.
Предпочтительно, механотренажер выполнен с возможностью размещения его рамы (7) на основании (3) мобильной платформы (1) реабилитационного комплекса, оснащенной подъемным устройством для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1), которое выполнено с телескопическим электромеханическим приводом (6) подъемного устройства и механизмом адаптации положения основания (3), образованным двумя криволинейными шарнирно установленными параллельно с возможностью совместного поворота коромыслами (4) для регулирования положения основания (3) с рамой (7) по высоте.
Предпочтительно, механотренажер выполнен с возможностью размещения его рамы (7) на основании (3) мобильной платформы (1) реабилитационного комплекса, оснащенной подъемным устройством для регулирования по высоте положения основания (3) с рамой (7) относительно мобильной платформы (1), которое выполнено с пневматическим или гидравлическим сервоприводом или по, меньшей мере, одной телескопической колонной.
Предпочтительно, механотренажер выполнен с возможностью подключения к блоку 23 запуска и контроля режимов реабилитации блока 33 обработки биосигналов датчика (26) регистрации биоэлектрических сигналов напряжения мышц и датчика (27) регистрации фонового биоэлектрического сигнала, связанных между собой по проводному или беспроводному каналу связи, при этом комплекс снабжен выносным пультом 25 аварийного выключения механотренажера, установленным на раме 7, выполненным с возможностью взаимодействия с блоком 23 запуска и контроля режимов реабилитации, а также с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
Предпочтительно, механотренажер снабжен микроконтроллером (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения и блоком (21) управления приводным двигателем (9) привода поступательного перемещения, выполненными с возможностью передачи на блок (23) запуска и контроля режимов реабилитации информации о положении каретки (14) привода поступательного перемещения.
Предпочтительно, концевые выключатели (20), выносной пульт (25) аварийного выключения, приводной двигатель (9) привода поступательного перемещения, реверсивный электродвигатель (36) ложемента (17) стопы и датчик (39) ложемента 17 стопы для измерения усилия нагружения ложемента (17) стопы, датчик (26) регистрации биоэлектрических сигналов напряжения мышц, датчик (27) фонового биоэлектрического сигнала, а также датчики физиологического состояния пациента и блок (21) управления приводным двигателем (9) привода поступательного перемещения выполнены с возможностью обмена информацией с микроконтроллером (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения, который выполнен с возможностью обмена информацией по проводному или беспроводному каналу связи с блоком (23) запуска и контроля режимов реабилитации, при этом микроконтроллер (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления приводным двигателем (9) привода поступательного перемещения и реверсивным электродвигателем (36) ложемента (17) стопы в случае потери связи или выхода из строя блока 23 запуска и контроля режимов реабилитации.
Предпочтительно, микроконтроллер (22) резервного аварийного управления приводным двигателем (9) привода поступательного перемещения выполнен с возможностью обмена информацией с блоком (23) запуска и контроля режимов реабилитации комплекса, выполненным с возможностью формирования базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками.
На чертеже фиг.1 изображен реабилитационный комплекс для нижних конечностей, на фиг.2 - перемещение рамы с механотренажером на кушетку справа и слева, на фиг.3 - размещение электродвигателя на ложементе стопы, на фиг.4 - размещение датчика измерения усилия нагружения на ложементе стопы, на фиг. 5 - колесная платформа при двух положениях дисплея, на фиг.6 - схема установки датчиков регистрации биоэлектрических сигналов, на фиг.7 - трансмиссия механотренажера, на фиг.8 - ложемент голени, на фиг.9 - ложемент бедра, на фиг.10 - кушетка с установленной к ее изножью мобильной платформой, на фиг.11 - схема подъемного устройства мобильной платформы в крайних положениях, на фиг.12 - схема шарнирно-рычажного механизма в крайнем положении.
На чертежах обозначены:
1 - мобильная платформа (тележка),
2 - поворотные колеса,
3 - основание,
4 - коромысло,
5 - шарниры подъемного устройства,
6 - электромеханический привод подъемного устройства,
7 - рама,
8 - линейные направляющие,
9 - приводной двигатель (продольного привода поступательного перемещения),
10 - соединительное устройство (муфта),
11 - ходовой винт,
12 - гайка,
13 - шарнир стойки,
14 - каретка,
15 - ложемент голени,
16 - переставляемые винты (переустановки ложемента стопы),
17 - ложемент стопы,
18 - винт фиксации ложемента стопы,
19 - ложемент бедра,
20 - концевой выключатель,
21 - блок управления приводным двигателем,
22 - микроконтроллер резервного аварийного управления,
23 - блок запуска и контроля режимов реабилитации (планшет, персональный компьютер),
24 - сенсорный дисплей,
25 - выносной пульт аварийного выключения,
26 - датчик регистрации биоэлектрических сигналов напряжения мышц
27 - датчик регистрации фонового биоэлектрического сигнала,
28 - кабель соединительный,
29 - манжета фиксации датчиков,
30 - пряжка,
31 - провода,
32 - контур реабилитируемой нижней конечности пациента,
33 - блок обработки биосигналов датчиков (с встроенным аккумулятором),
34 - электроды датчика регистрации биоэлектрического сигнала напряжения мышц и датчика регистрации фонового биоэлектрического сигнала,
35 - кушетка (кровать, койка),
36 - реверсивный электродвигатель ложемента стопы,
37 - монтажная рама реверсивного электродвигателя нагружения пятки и носка стопы,
38 - монтажная рама датчика измерения усилия нагружения пятки и носка стопы,
39 - датчик ложемента стопы для измерения усилия нагружения стопы,
40 - пружины,
41 - ведущее звено трансмиссии,
42 - стойка мобильной платформы,
43 - первое замыкающее звено,
44 - второе замыкающее звено,
45 - ламели (ремни) ложементов бедра и голени,
46 - панель (присоединительный элемент) для монтажа ложемента стопы,
47 - ремни фиксации стопы,
48 - изножье кушетки,
49 - боковые рукоятки стойки,
50 - поперечная балка мобильной платформы,
51 - перемычка ложемента бедра,
52 - боковые звенья ложемента бедра,
53 - боковые звенья ложемента голени,
54 - средние звенья ложемента голени.
Реабилитационный комплекс для нижних конечностей содержит размещенные на колесной мобильной платформе 1 программируемый блок 23 запуска и контроля режимов реабилитации (модуль управления) и механотренажер (модуль активно-пассивной разработки нижних конечностей) с рамой 7, установленной с возможностью поперечного перемещения на основании 3, регулируемом по высоте относительно мобильной платформы 1.
При этом механотренажер включает в себя связанный каналом связи с блоком 23 запуска и контроля режимов реабилитации блок 33 обработки биосигналов датчика 26 биоэлектрических сигналов напряжения мышц и датчика 27 фонового биоэлектрического сигнала, а также продольный привод поступательного перемещения, связанный с каркасом ложа для размещения реабилитируемой нижней конечности 32 трансмиссией.
Шарнирно-рычажные механизмы трансмиссии расположены с двух сторон от продольного привода поступательного перемещения, приводной двигатель 9 которого связан с блоком 23 запуска и контроля режимов реабилитации, а каретка 14 - шарнирно соединена с ведущим звеном 41 трансмиссии, шарнирно сопряженным с обоими шарнирно-рычажными механизмами,
Мобильная платформа 1 выполнена Т-образной в плане конфигурации, образованной соединенными сваркой поперечной балкой 50 и продольной балкой, расположенной снизу вдоль основания 3 и снабженной, по меньшей мере, одним колесом 2 на свободном конце, при этом поперечная балка 50 снабжена парой колес 2, установленных на ее противоположных концах.
Мобильная платформа 1 снабжена стойкой 42, соединенной симметричными парными продольными и поперечными ребрами жесткости с продольной балкой и с поперечной балкой 50. Наклонная стойка 42, выполненной с одной или с двумя боковыми плавно изогнутыми симметричными рукоятками 49 перемещения комплекса.
Блок 23 запуска и контроля режимов реабилитации выполнен с кнопкой включения и сенсорным дисплеем 24, который установлен на стойке 42 мобильной платформы 1 с помощью шарнира 13 с возможностью поворота и визуального доступа экрана дисплея 24 для пациента.
Основание 3 и рама 7 механотренажера снабжены продольно сопряженными поперечными линейными направляющими 8 с возможностью поперечного перемещения рамы 7 с механотренажером относительно основания 3 в две стороны (вправо и влево от последнего).
Ложе для размещения реабилитируемой нижней конечности 32 снабжено поперечными ламелями (ремнями) 45 расположенными параллельно друг другу и выполненными из эластичного материала с тканевыми прокладками. из эластичного материала с тканевыми прокладками. Ламели (ремни) 45 установлены в прорези боковых звеньев 52,53 ложементов 15,19 голени и бедра с возможностью регулировки длины ремней таким образом, чтобы вместе с ложементами 17, 15 обеспечить передачу движения трансмиссии на конечность пациента с высокой точностью при этом не вызывая болевых ощущений.
В случае высокой чувствительности кожи пациента на ламелях 45 размещается дополнительная вкладка из мягкого материала.
Комплекс оснащен подъемным устройством для регулирования по высоте от Н1 до Н2 по фиг.11 положения основания 3 с рамой 7 относительно мобильной платформы 1. На стойке 42 имеются сетевой тумблер и переключатель электропитания подъемного устройства для регулирования по высоте (/нейтральное положение/питание аппарата механотерапии).
В частных случаях реализации подъемное устройство для регулирования по высоте положения основания 3 с рамой 7 относительно мобильной платформы 1 выполнено с телескопическим электромеханическим приводом (6) подъемного устройства и с механизмом адаптации положения основания 3, образованным двумя шарнирно установленными параллельно с возможностью совместного поворота криволинейными коромыслами 4 для регулирования положения основания 3 с рамой 7 по высоте.
В иных частных случаях реализации подъемное устройство для регулирования по высоте положения основания 3 с рамой 7 относительно мобильной платформы 1 выполнено с пневматическим или гидравлическим сервоприводом и/или по, меньшей мере, одной телескопической колонной.
Шарнирно-рычажные механизмы трансмиссии механотренажера снабжены каждый первым и вторым замыкающими звеньями 43, 44, выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено 43 выполнено с шарнирами на концах и с промежуточным шарниром в зоне его перегиба, а второе замыкающее звено 44 - с шарнирами на концах.
Первое и второе замыкающие звенья 43, 44 установлены с обеих наружных сторон трансмиссии и связаны шарнирами на своих концах с каркасом ложа для размещения реабилитируемой нижней конечности 32 и с рамой 7 механотренажера.
Каркас ложа для размещения реабилитируемой нижней конечности 32 образован из ложемента 19 бедра и ложемента 15 голени, выполненных в виде рамок, шарнирно связанных между собой встречными концами их боковых звеньев 52, 53,
Первое и второе замыкающие звенья 43, 44 и боковые звенья 52 ложемента 19 бедра и боковые звенья 53 ложемента голени 15 выполнены в виде пластин из металлической полосы, ориентированных вертикально между замыкающими звеньями 43, 44,
Комплекс снабжен ложементом 17 стопы (модуль пассивной разработки голеностопа) и присоединительным элементом для монтажа ложемента 17 стопы к механотренажеру, выполненным в виде панели 46, соединенной переставляемыми винтами 16 с боковыми звеньями 53 ложемента 15 голени.
Ложемент 17 стопы со стороны размещения ее подошвы снабжен ремнями 47 фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагрузки на стопу из группы, включающей: реверсивный электродвигатель 36 ложемента 17 стопы для попеременного нагружения пятки и/или носка, и, по меньшей мере, один съемный датчик 39 ложемента 17 стопы для измерения усилия нагружения стопы, электрически связанными с блоком 23 запуска и контроля режимов реабилитации.
Продольный привод поступательного перемещения выполнен в виде винтовой передачи с ходовым винтом 11 и с гайкой 12, соединенной с кареткой 14 для перемещения на резьбе ходового винта 11.
Приводной двигатель 9 ходового винта 11 выполнен в виде реверсивного шагового электродвигателя, сопряженного с ходовым винтом 11, каретка 14 которого шарнирно соединена с ведущим звеном 41 трансмиссии, с возможностью преобразования поступательного перемещения каретки 14 в поворотное движение боковых звеньев 52, 53 ложементов 15, 19 голени и бедра.
При этом приводной двигатель 9 сопряжен с ходовым винтом 11 винтовой передачи соединительным устройством из группы: муфта 10, волновая передача, ременная передача.
Блок 23 запуска и контроля режимов реабилитации и регистрирующий блок 33 обработки биосигналов датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, (модуль регистрации биоэлектрических сигналов), связаны между собой по проводному или беспроводному каналу связи.
Комплекс снабжен выносным пультом 25 аварийного выключения приводного двигателя 9, установленным на основании 3 или на раме 7 механотренажера и электрически связанным с блоком 23 запуска и контроля режимов реабилитации, выполненным с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
Комплекс снабжен микроконтроллером 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения, а также концевыми выключателями 20, установленными с возможностью взаимодействия с кареткой 14 привода поступательного перемещения, и блоком 21 управления приводным двигателем 9 привода поступательного перемещения для передачи на блок 23 запуска и контроля режимов реабилитации и на микроконтроллер 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения информации о положении каретки 14 привода поступательного перемещения.
Концевые выключатели 20, выносной пульт 25 аварийного выключения, приводной двигатель 9 привода поступательного перемещения, реверсивный электродвигатель 36 ложемента 17 стопы, датчик 39 ложемента 17 стопы для измерения усилия нагружения стопы, датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, регистрации биоэлектрических сигналов напряжения мышц и фонового биоэлектрического сигнала, а также блок 21 управления приводным двигателем 9 привода поступательного перемещения электрически скоммутированы с микроконтроллером 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения.
Микроконтроллер 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения связан по проводному или беспроводному каналу связи с блоком 23 запуска и контроля режимов реабилитации, причем микроконтроллер 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления упомянутыми приводным двигателем 9 и реверсивным электродвигателем 36 ложемента 17 стопы в случае потери связи или выхода из строя блока 23 запуска и контроля режимов реабилитации.
Программируемый блок 23 запуска и контроля режимов реабилитации выполнен с возможностью формирования базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети программного модуля, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками
Заявляемый механотренажер реабилитационного комплекса для нижних конечностей (модуль активно-пассивной разработки нижних конечностей), предназначен для использования в охарактеризованном выше реабилитационном комплексе (по любому из пунктов 1 - 18 формулы изобретения), и представляют совместно устройство и его часть.
Механотренажер реабилитационного комплекса для нижних конечностей характеризуется тем, что он содержит размещенный на раме 7 продольный привод поступательного перемещения, связанный трансмиссией с каркасом ложа для размещения реабилитируемой нижней конечности 32, образованным из последовательно размещенных и шарнирно связанных между собой ложемента 19 бедра и ложемента 15 голени, интегрированных в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от продольного привода поступательного перемещения, двигатель 9 которого связан с кареткой 14 шарнирно соединенной с ведущим звеном 41 трансмиссии, шарнирно сопряженным с обоими шарнирно-рычажными механизмами трансмиссии.
Шарнирно-рычажные механизмы снабжены каждый первым и вторым замыкающими звеньями 43, 44, выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено 43 выполнено с шарнирами на концах и с промежуточным шарниром в зоне перегиба, а второе замыкающее звено 44 - с шарнирами на концах, причем первое и второе замыкающие звенья 43, 44 установлены с обеих наружных сторон трансмиссии и соединены между собой с помощью промежуточного шарнира первого замыкающего звена 43, сопряженного с одним из шарниров второго замыкающего звена 44, другой шарнир которого соединен с ложементом 19 бедра, а первое замыкающее звено 43 соединено шарнирами на своих концах с ложементом 15 голени и с рамой 7.
Каркас ложа для размещения реабилитируемой нижней конечности 32 образован из ложемента 19 бедра и ложемента 15 голени, выполненных в виде рамок, шарнирно связанных между собой встречными концами их боковых звеньев 52, 53.
При этом:
- ложемент 15 голени выполнен в виде рамки, образованной из звеньев, из которых средние звенья 54 жестко соединены между собой и с ведущим звеном 41 трансмиссии, а два боковых звена 53 расположены параллельно и выполнены каждое с шарниром на конце и со средним шарниром, расположенным на разных расстояниях между ними (концами бокового звена 53), причем каждое боковое звено 53 соединено шарниром на своем конце с боковым звеном 52 ложемента 19 бедра, а средним шарниром - с одним концом первого замыкающего звена 43,
- ложемент 19 бедра выполнен в виде рамки, образованной из звеньев, средние из которых расположены с образованием перемычки 51, а два параллельных боковых звена 52 выполнены с шарнирами на своих концах, и соединены каждое одним из этих шарниров с боковым звеном 53 ложемента 15 голени, а вторым сопряжено с шарниром на конце второго замыкающего звена 44, другой конец которого сопряжен с промежуточным шарниром первого замыкающего звена 43, шарнирно закрепленного на раме 7 своим концом, противоположным концу, сопряженному со средним шарниром бокового звена 53 ложемента 15 голени.
Первое и второе замыкающие звенья 43, 44 и боковые звенья 52 ложемента 19 бедра и боковые звенья 53 ложемента голени 15 выполнены в виде пластин из металлической полосы, ориентированных в вертикальных плоскостях между замыкающими звеньями 43, 44, а боковые звенья 52, 53 ложементов 15, 19 голени и бедра снабжены поперечными параллельными ламелями 45 из эластичного материала с тканевыми прокладками.
Механотренажер снабжен ложементом 17 стопы который может быть съемным, заменяемым и поставляться самостоятельно, и присоединительным элементом для монтажа ложемента 17 стопы к механотренажеру, выполненным в виде панели 46, соединенной переставляемыми винтами 16 переустановки ложемента 17 стопы с боковыми звеньями 53 ложемента 15 голени.
Ложемент 17 стопы со стороны размещения ее подошвы снабжен ремнями 47 фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагружения стопы из группы, включающей: реверсивный электродвигатель 36 ложемента 17 стопы для попеременного нагружения пятки и/или носка, и, по меньшей мере, один съемный датчик 39 ложемента 17 стопы для измерения усилия нагружения стопы.
Механотренажер содержит, датчик 26 регистрации биоэлектрических сигналов напряжения мышц и датчик 27 регистрации фонового биоэлектрического сигнала, в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани бедра реабилитируемой нижней конечности 32, снабженных эластичной фиксирующей манжетой 29, выполненной с возможностью переустановки указанных датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала на реабилитируемой конечности 32. Датчик 26 регистрации биоэлектрических сигналов напряжения мышц и датчик 27 регистрации фонового биоэлектрического сигнала, непосредственно подключены к блоку 33 обработки биосигналов, снабженному встроенным аккумулятором (модуль регистрации биоэлектрических сигналов).
Механотренажер может быть снабжен, по меньшей мере, одной группой дополнительных датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани реабилитируемой конечности 32, снабженных встроенными аналого-цифровыми преобразователями (АЦП) и общей эластичной фиксирующей манжетой 29, выполненной с возможностью переустановки дополнительных датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, на реабилитируемой конечности 32, и, по меньшей мере, одним датчиком физиологического состояния пациента из группы: датчики температуры, пульса и давления.
Датчик 26 регистрации биоэлектрических сигналов напряжения мышц и датчик 27 регистрации фонового биоэлектрического сигнала, размещаются манжете (эластичном ремне) 29 фиксации с возможностью свободного перемещения по ремню 29, который фиксируется на реабилитируемой конечности 32 пациента в районе бедра посредством пряжки 30.
Продольный привод поступательного перемещения механотренажера выполнен в виде винтовой передачи с ходовым винтом 11 и с гайкой 12, соединенной с кареткой 14, для перемещения на резьбе ходового винта 11, приводной двигатель 9 которого выполнен в виде реверсивного шагового электродвигателя, сопряженного соединительным устройством с ходовым винтом 11 винтовой передачи, снабженной концевыми выключателями 20, установленными с возможностью взаимодействия с кареткой 14.
Каретка 14 шарнирно соединена с ведущим звеном 41 трансмиссии с возможностью преобразования поступательного перемещения каретки 14 в поворотное движение боковых звеньев 52, 53 ложементов 15, 19 голени и бедра, причем приводной двигатель 9 соединен с ходовым винтом 11 винтовой передачи соединительным устройством из группы: муфта 10, волновая передача, ременная передача.
Механотренажер, в соответствии со своим назначением, выполнен с возможностью размещения его рамы 7 на основании 3 в две стороны мобильной платформы 1, которая образована из двух пересекающихся балок, соединенных между собой с образованием Т-образной в плане конфигурации, снабжена наклонной стойкой 42 с боковыми рукоятками 49, оснащена поперечными линейными направляющими 8 для рамы 7 и подъемным устройством для регулирования по высоте положения основания 3 с рамой 7 относительно мобильной платформы 1, а также имеет блок 23 запуска и контроля режимов реабилитации выполнен с сенсорным дисплеем 24, который установлен на стойке 42 мобильной платформы 1 с помощью шарнира 13 с возможностью поворота над изножьем 48 кушетки 35 и визуального доступа экрана дисплея 24 для пациента.
Механотренажер выполнен с возможностью размещения его рамы 7 на основании 3 мобильной платформы 1, оснащенной подъемным устройством для регулирования по высоте положения основания 3 с рамой 7 относительно мобильной платформы 1 которое в одних частных случаях реализации выполнено с телескопическим электромеханическим приводом (6) подъемного устройства и механизмом адаптации положения основания 3, образованным двумя криволинейными шарнирно установленными параллельно с возможностью совместного поворота коромыслами 4 для регулирования положения основания 3 с рамой 7 по высоте, а в других частных случаях реализации - с пневматическим или гидравлическим сервоприводом и/или по, меньшей мере, одной телескопической колонной.
Механотренажер выполнен с возможностью подключения к блоку 23 запуска и контроля режимов реабилитации реабилитационного комплекса, причем регистрирующий блок 33 обработки биосигналов датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, связаны между собой по проводному или беспроводному каналу связи, при этом комплекс снабжен выносным пультом 25 аварийного выключения механотренажера, установленным на раме 7, выполненным с возможностью взаимодействия с блоком 23 запуска и контроля режимов реабилитации, а также с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
Механотренажер снабжен микроконтроллером 22 резервного аварийного управления приводным двигателем 9 привода поступательного перемещения и блоком 21 управления приводным двигателем 9 привода поступательного перемещения, выполненными с возможностью передачи на блок 23 запуска и контроля режимов реабилитации информации о положении каретки 14 привода поступательного перемещения. Микроконтроллер 22 резервного аварийного управления приводным двигателем 9 привода поступательного перемещения передает на блок 21 управления приводным двигателем 9 привода поступательного перемещения команды о направлении и скорости вращения последнего с возможностью его остановки при контакте каретки 14 с одним из концевых выключателей 20 или при нажатии кнопки выносного пульта 25.
Концевые выключатели 20, выносной пульт 25 аварийного выключения, приводной двигатель 9 привода поступательного перемещения, реверсивный электродвигатель 36 ложемента 17 стопы и датчик 39 ложемента 17 стопы для измерения усилия нагружения ложемента 17 стопы, датчик 26 регистрации биоэлектрических сигналов напряжения мышц и датчик (27) регистрации фонового биоэлектрического сигнала, а также датчики физиологиического состояния пациента и блок 21 управления приводным двигателем 9 привода поступательного перемещения выполнены с возможностью обмена информацией с микроконтроллером 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения, который выполнен с возможностью обмена информацией по проводному или беспроводному каналу связи с блоком 23 запуска и контроля режимов реабилитации, при этом микроконтроллер 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления упомянутыми приводным двигателем 9 и реверсивным электродвигателем 36 ложемента 17 стопы в случае потери связи или выхода из строя блока 23 запуска и контроля режимов реабилитации.
Механотренажер выполнен с возможностью обмена информацией с программируемым блоком 23 запуска и контроля режимов реабилитации с возможностью формирования последним базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети программного модуля, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками.
Комплекс роботизированный медицинский для реабилитации нижних конечностей используется следующим образом.
Как правило, комплекс управляется предустановленной программой. Название программы «Нейроглиф», версия 1.0, язык интерфейса - русский. Класс безопасности программного обеспечения по ГОСТ Р МЭК 62304 - А.
Реабилитационный комплекс для нижних конечностей выполнен с возможностью перемещения аппарата механотренажера, смонтированного на раме 7 силами неподготовленного человека внутри стандартизированных больничных помещений и его установки на кушетку 35 пациента с соблюдением ГОСТ Р ИСО 11228-1-2009 Система стандартов безопасности труда (ССБТ) таким образом, чтобы это перемещение и установку могли осуществлять 99% пользователей как мужского, так и женского пола любого возраста и физической подготовки.
Реабилитационный комплекс для нижних конечностей позволяет проводить реабилитацию на ранних этапах течения болезни, в том числе и в палатах интенсивной терапии и реанимации, когда перемещение пациента исключено по медицинским показаниям, а использование стационарных реабилитационных комплексов не соответствует основному функциональному назначению данных помещений.
Использование комплекса основано на том, что оперативно организованное механическое реабилитационное воздействие, контролируемое собственными нервными импульсами пациента позволяет в ряде клинических случаев добиться повышения эффективности проводимой терапии. При выполнении двигательной задачи, нейронные команды посылаются для активации набора мышц. Учитывая, какие мышцы активируются и как они связаны со скелетом, будет соответствующее и специфическое движение тела посредством моторной адаптации и обучения.
Условия использования комплекса - медицинские лечебные и лечебно-профилактические учреждения. Потенциальный потребитель: медицинские специалисты с высшим образованием (врачи-физиотерапевты, реабилитологи, неврологи) или со средне-специальным медицинским образованием (медицинская сестра), обученные работе с изделием.
Требования по внешним условиям эксплуатации:
- температура окружающего воздуха - +15-+35°С;
- номинальное значение относительной влажности при температуре 25°С - 80%;
- атмосферное давление - 84,0-106,7 кПа (630-800 мм рт.ст.).
Усилие необходимое для перемещения комплекса с разблокированными колёсами составляет 25 ± 5 Н, усилие необходимое для перемещения комплекса с заблокированными колёсами 2 равно 220 ± 15 Н.
Показания к применению:
- болезни двигательных нейронов (спинальные мышечные атрофии, боковой амиотрофический склероз, миелопатии и др.);
- радикулопатии (вертеброгенные и невертеброгенные);
- полинейропатии (диабетические, токсические, дефицитарные, при хронических соматических заболеваниях; дизиммунные (синдром Гийена-Барре), хроническая воспалительная демиелинизирующая полинейропатия, парапротеинемические, васкулит-ассоциированные, наследственные и др.);
- мононейропатии, множественные мононейропатии (компрессионные, посттравматические, дизиммунные, мультифокальная моторная нейропатия);
- миастения и миастеноподобные заболевания, синдром Ламберта-Итона;
- миопатии разного генеза, наследственные мышечные дистрофии, миотонии и др.;
- восстановительный период после консервативного (наложение гипса) и оперативного (фиксация обломков кости с помощью небольшого гвоздя или винта, с последующим наложением гипса) лечения переломов ног;
- реабилитация после замены суставов эндопротезом;
- вывихи, ушибы, растяжения;
- восстановительный период после операций на сухожилиях и связках,
- восстановительная терапия при заболеваниях центральной нервной системы (ЦНС);
- трисомия по хромосоме 21 (синдром Дауна).
Изделие работоспособно при питании от однофазной сети переменного тока напряжением (220±22) В, частотой 50 Гц, максимальная потребляемая изделием мощность должна быть не более 400 ВА.
Мобильная платформа 1 - транспортировочная колесная тележка - перемещается в палату к кушетке 35 пациента и благодаря своей Т-образной форме устанавливается в положение, когда основание 3 находится вплотную к кушетке 35, а стойка 42 - над изножьем 48 кушетки 35.
Геометрия (ширина и высота) стойки 42 и размеры Т-образной платформы, в том числе продольной балки и поперечной балки 50 выбираются таким образом, что позволяют перемещать платформу вдоль кровати и размещать аппарат в зависимости от роста пациента, при этом исключая опрокидывание комплекса в крайних положениях рамы 7, не мешая доступу персонала для обслуживания как самого пациента, так и соседних пациентов в палате, при этом пациент имеет возможность с комфортом наблюдать за параметрами упражнений, отражаемыми на дисплее 24, находящемся на уровне глаз пациента.
Для размещения комплекса должно иметься свободное пространство: для реабилитации левой ноги - с левой стороны кушетки 35, для правой - с правой стороны соответственно. Платформа 1 ставится стойкой 42 к изножью 48 кушетки 35, это обусловлено тем, что в палатах кровати всегда расположены изголовьем к стене и имеют /проходы сбоку. Платформа 1 завозится в палату, разворачивается к нужной кушетке 35 и задвигается с требуемой стороны до ее совмещения с основанием 3, которое регулируется на нужную высоту. В зависимости от роста пациента, она останавливается в нужном месте. Для пациента низкого роста она задвигается до упора - когда стойка 42 упирается в изножье. Соответственным образом выбирается размер длинной (продольной) балки Т-образной платформы 1.
Колеса 2 платформы 1 стопорятся, после чего подвижное основание 3 с помощью электромеханического привода (6) подъемного устройства поднимается (или опускается) на платформе 1 в пределах от Н1 до Н2, показанных на фиг.11, на уровень кушетки 35. Далее, в зависимости от реабилитируемой конечности (правая или левая нога), производится выдвижение направляющих 8 и горизонтальное смещение подвижной рамы 7 с механотренажером в соответствующем направлении и установка этой рамы 7 на поверхность кушетки 35.
Диапазон регулирования высоты подъема основания 3 над платформой 1 может изменяться от 455 до 735 ± 20 мм.
Конструкция колесной платформы 1 позволяет перемещать раму 7 с механотренажером относительно платформы 1 по трем направлением (три степени свободы). С учетом того, что колесная платформа 1 за счет поворотных колес 2 может вращаться вокруг своей оси, рама 7 обладает четырьмя степенями свободы (тремя поступательными и одной вращательной).
Длина поперечного хода рамы 7 по направляющим 8 составляет 300 ± 20 мм. Усилие перемещения рамы 7, составляет 50 ± 3 Н.
Эта схема благодаря Т-образной конфигурации платформы 1 со стойкой 42 позволяют устанавливать раму 7 с механотренажером на любую кушетку 35 независимо от ее высоты, ширины и высоты изножья, как с левой, так и справой стороны в зависимости от реабилитируемой конечности пациента. Переставляемые винты 16 служат для переустановки, при необходимости, панели 46 с ложементом 17 стопы в соответствии с длиной реабилитируемой конечности 32.
На реабилитируемой конечности 32 пациента в районе бедра с помощью манжеты 29 и пряжки 30 устанавливаются электроды датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, после чего нога пациента размещается и фиксируется на ламелях 45 в ложементе 15 голени, ложементе 19 бедра, а также фиксируется ремнями 47 на ложементе 17 стопы. Датчик 26 регистрации биоэлектрических сигналов напряжения мышц является датчиком биполярной неинвазивной регистрации биопотенциалов, позволяет отслеживать суммирующую активность определенной мышцы целиком путем регистрации разности потенциалов между двумя точками на поверхности конечности, на которых установлены его электроды. Результат измерения является суммой множества одиночных импульсов отдельных мышечных волокон, захваченных площадью электродов.
При этом конструктивно блок 33 обработки биосигналов датчиков реализован с возможностью устанавливать датчик 26 регистрации биоэлектрических сигналов напряжения мышц и датчик 27 регистрации фонового биоэлектрического сигнала на поверхность кожи без специальной подготовки, в том числе без выбривания волос и использования электропроводящего геля, что достигается за счет их высокой чувствительности, высокого качества обработки сигнала и автономности блока 33. Под автономностью подразумевается возможность отключение от основной сети электропитания (работа с питанием от встроенного в блок 33 аккумулятора) и передачи данных с датчиков на блок 23 запуска и контроля режимов реабилитации (планшет, персональный компьютер), по беспроводному каналу (WiFI).
Ввод и отображение информации осуществляется при помощи сенсорного дисплея 24. через графический человеко-машинный интерфейс как в ручном режиме, когда скорость, направление движения и длительность движения каретки 14 задаются оператором комплекса на сенсорном экране дисплея 24 в виде числовых значений, так и в автоматическом режиме, когда параметры работы комплекса определяются алгоритмом в зависимости от выбранного оператором одного их четырех режимов работы.
Сенсорный дисплей 24 позволяет оператору провести необходимые настройки блока 23 запуска и контроля режимов реабилитации (планшет) и микроконтроллера 22 резервного аварийного управления приводным двигателем (9) привода поступательного перемещения перед началом упражнения, позволяющие устанавливать режим нагружения и получать визуальную биологическую обратную связь о ходе упражнения в виде графиков и анимации сгибаемой конечности, а также формировать нагрузку на пациента с учетом индивидуальных особенностей, повышая и усложняя ее по ходу курса реабилитации.
В комплексе осуществляются следующие виды диагностики:
- Диагностика подвижности коленного и тазобедренного суставов
- Диагностика подвижности и силы стопы (голеностопа).
- Диагностика силы мышц бедра.
Через управляющее ПО, установленное на блоке 23 запуска и контроля режимов реабилитации (планшет, персональный компьютер) производится диагностика максимального угла сгибания ноги пациента до появления болевых ощущений, этот угол фиксируется как максимальный в ходе упражнения. Далее посредством управляющего ПО блока 23 производится регистрация минимального и максимального уровня биоэлектрического сигнала пациента посредством максимального расслабления и напряжения мышц бедра реабилитируемой конечности пациента. Данные об уровне сигнала поступают в блок 23 запуска и контроля режимов реабилитации (планшет, персональный компьютер). Эти данные совместно с данными о пациенте фиксируются в памяти персонального компьютера и отображаются на дисплее 24.
В зависимости от режима (пассивный, пассивный разработки голеностопа, активно-пассивный или активный) на дисплее 24 проводится настройка (калибровка) угла сгибания, усилия нажатия стопой и/или уровня сигнала датчиков 26,27, 39.
Параметры работы комплекса и механотренажера определяются алгоритмом в зависимости от выбранного оператором одного их четырех режимов работы:
- пассивного, при котором производится циклическое сгибание и разгибание конечности пациента с постоянной скоростью и осуществляется воздействие на коленный и тазобедренный суставы пациента для избежания контрактур;
- пассивного голеностопа, при котором, в отличии от пассивного режима, производится циклическое сгибание и разгибание стопы пациента с постоянной скоростью и осуществляется воздействие на голеностопный сустав пациента для избежания контрактур, при этом ложемент 17 стопы выполнен с жестко закрепленным на нем реверсивным электродвигателем 36 ложемента 17 стопы, шарнирно закрепленным на монтажной раме 37, которая зафиксирована винтом 18 к ложементу 15 голени;
активно-пассивного, при котором, в отличии от пассивного режима, скорость сгибания и разгибания конечности задается соотношением усилий нажатия носка Fн и пятки Fп стопы пациента на ложемент 17 стопы, возникающего при напряжении пациентом мышц голени реабилитируемой конечности; при этом ложемент 17 стопы выполнен с дополнительным жестко закрепленными на нем пружинами 40 и шарнирно закреплен на монтажной раме 38, которая зафиксирована винтом 18 на ложементе 15, усилие стопы посредством ложемента 17 и пружин 40 передается на датчик 39 ложемента 17 стопы, жестко закрепленные на раме 38 С датчика 39 ложемента 17 стопы информация передается на блок (планшет) 23, где управляющее ПО рассчитывает скорость и направление движения конечности пациента следующим образом:
при Fн> Fп происходит разгибание, при Fн< Fп происходит сгибание, при Fн= Fп движения не происходит, при этом скорость разгибания и сгибания пропорциональны отношению Fн/Fп и Fп/Fн соответственно, что позволяет имитировать биомеханику шага человека и восстанавливать контроль мышц-сгибателей и разгибателей голени за счет биологической обратной связи;
- активного, при котором, скорость сгибания и разгибания конечности задается соотношением напряжением мышц сгибателей и разгибателей бедра , возникающего при напряжении пациентом мышц бедра реабилитируемой конечности.
При этом регистрация напряжения мышц производится биполярными датчиком 26 регистрации биоэлектрических сигналов напряжения мышц а также датчиком 27 регистрации фонового биоэлектрического сигнала, расположенным с внутренней стороны бедра пациента на максимальном удалении от мышц-сгибателей и мышц-разгибателей седлающим образом:
электрическое напряжение между электродами датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала посредством встроенных в них АЦП, преобразуется в цифровой сигнал, поступающий по проводам 31 в блок 33 обработки, анализирующий сигнал в реальном времени и передающий значения напряжения мышц относительно фонового биоэлектрического сигнала на блок (планшет) 23, где управляющее ПО рассчитывает скорость и направление движения конечности пациента седлающим образом: при усилии разгибания Nр> усилия сгибания Nс происходит разгибание конечности, при Nр< Nс происходит сгибание, при Nр= Nс движения не происходит, при этом скорость разгибания и сгибания пропорциональны отношению Nр/ Nс и Nс/ Nр соответственно.
В случае подготовки активного режима для регистрации фонового сигнала мышц бедра после фиксации ноги пациента производится операция «Регистрация покоя».
Далее пациент производит надавливание пяткой стопы на ложемент 17 с максимальным усилием. При достижении максимального усилия производится регистрация сгибания, при этом пациент удерживает максимальное усилие в течении 5 секунд.
Полученные значения и углы сохраняются в памяти блока 23 и задаются как максимальные.
Далее посредством комплекса производится медленное сгибание ноги в коленном суставе, при достижении болезненных ощущений производится разгибание до устранения болевых ощущений, Полученный угол сохраняется в памяти блока 23 и задается как максимальный.
В случае проведения активно-пассивного режима пациент производит надавливание на ложемент 17 стопы носком стопы с максимальным усилием. При достижении максимального усилия пациент удерживает максимальное усилие в течении 5 секунд. Далее пациент производит надавливание пяткой стопы на ложемент 17 с максимальным усилием. При достижении максимального усилия производится регистрация сгибания, при этом пациент удерживает максимальное усилие в течении 5 секунд. Полученное усилие и соответствующие углы сохраняются в памяти блока 23.
Модуль 17 стопы позволяет сгибать и разгибать стопу без движения ноги в колене, а также совмещать варианты движения стопы и колена.
Затем производится операция диагностики максимального уровня сигнала (силы мышц бедра), для чего пациент должен максимально напрячь реабилитируемую конечность в распрямленном состоянии (статическое напряжение). При этом пациент пытается максимально напрячь мышцы разгибатели путем вдавливания стопы на ложемент 17 в нижнем направлении. и пациент пытается развить максимальное усилие в течении 5 секунд. Далее пациент пытается максимально напрячь мышцы сгибатели путем попытки согнуть ногу в колене (стопа упирается в ремни 47 ложемента 17) . Пациент пытается развить максимальное усилие в течении 5 секунд.
После чего нажимается кнопка «Сохранить» - полученные значения максимальных усилий сгибателей и разгибателей бедра.
В процессе калибровки и выполнения упражнений управляющее ПО блока 23 в реальном времени вырабатывает команды управления реверсивным приводным двигателем 9 на основе данных, поступающих с датчика 26 регистрации биоэлектрических сигналов напряжения мышц и датчика 27 регистрации фонового биоэлектрического сигнала, задавая направление и скорость вращения и передает их на микроконтроллер 22 резервного аварийного управления приводным двигателем 9 привода поступательного перемещения механотренажера. Вращение вала реверсивного приводного двигателя 9 через редуктор и соединительное устройство (муфту) 10 передается ходовому винту 11 винтовой пары. Гайка 12 перемещается по ходовому винту 11, передавая усилие движения на каретку 14. Перемещение каретки 14 вызывает движение ведущего звена 41 влево (по фиг.1) от приводного двигателя 9 и поворачивает их сопряженные шарниры соединения ложементов 15 и 19 голени и бедра вверх по часовой стрелке (по фиг.1), приводя при этом в движение звенья 43,43, совместный принудительный поворот которых обеспечивает устойчивость, безопасность, отсутствие ударов и вибраций, то есть плавность функционирования шарнирно-рычажных механизмов трансмиссии в целом и, соответственно, комфортное восстанавливающее действие сгибаемой при этом конечности пациента, размещенной на ложементах 15, 19.
Для разгибания конечности вращение вала реверсивного приводного двигателя 9 через редуктор и соединительное устройство (муфту) 10 передается ходовому винту 11 винтовой пары в направлении приближения каретки 14 к приводному двигателю 9. Гайка 12 перемещается по ходовому винту 11, передавая усилие движения на каретку 14. Перемещение каретки 14 вызывает движение ведущего звена 41 вправо (по фиг.1) от приводного двигателя 9 поворачивает шарниры соединения ложементов 15 и 19 голени и бедра вниз против часовой стрелки (по фиг.1), приводя при этом в движение звенья 43,44, соответствующий принудительный поворот которых обеспечивает устойчивость, безопасность, отсутствие ударов и вибраций, то есть плавность функционирования шарнирно-рычажных механизмов трансмиссии в целом и, соответственно, комфортное восстанавливающее действие разгибаемой при этом конечности пациента, размещенной на ложементах 15, 19. Крайнее положение звеньев шарнирно-рычажного механизма механотренажера в конце прямого рабочего хода S каретки 14 достигается при углах А1; А2 поворота звеньев, показанных на фиг.12. Углы А1; А2, образующиеся между парами звеньев в процессе движения достаточно велики, чтобы пары звеньев не могли защемлять и, тем более, разрезать попавшие между ними предметы.
При совершении упражнений сгибания-разгибания ограничение перемещения второго замыкающего звена 44 именно в вертикальной плоскости, расположенной между пластинами ложемента 19 бедра и первого замыкающего звена 43, не позволяет звену 44 и ложементу 19 бедра совершать не контролируемые повороты, например, в результате случайных движений конечности пациента, и вовлекать в них какой-то из шарнирно-рычажных механизмов трансмиссии.
Движение каретки 14 по ходовому винту 11 может происходить до контакта с одним из конечных выключателей 20 или до команды блока 23 или выносного пульта 25 аварийного выключения, на останов или реверс приводного двигателя 9. При запуске любого из режимов происходит автоматический перевод каретки 14 в исходное положение, пока каретка 14 не перейдет в начальное положение, упражнение нельзя включать.
Блок 23 запуска и контроля режимов реабилитации при этом может быть подключен к сети Интернет и может осуществлять передачу данных о ходе упражнения на удаленный сервер.
Собранные данные используются для статистического анализа (в том числе и с использованием искусственного интеллекта) для формирования индивидуальных рекомендаций по параметрам и количеству упражнений в различных режимах работы в зависимости от анатомических и физиологических особенностей пациента, а также от его текущего состояния и анамнеза.
Помимо этого, лечащий врач имеет возможность подключения к серверу для просмотра данных о ходе упражнения, проведения диагностики (в том числе в реальном времени), что позволяет реализовать фикцию телемедицины.
Дисплей 24 может поворачиваться на шарнире 13 к пациенту, обеспечивая визуальную обратную связь и психологическое равновесие.
Комплекс обеспечивает реализацию, в частности, следующих режимов работы:
Пассивный (без напряжения мышц конечности), при котором совершаются повторяющиеся циклы сгибания/разгибания реабилитируемой конечности в заданном угле диапазоне и с заданной скоростью. Управление направлением и скоростью со стороны пациента не осуществляется;
Активно-пассивный (с частичным напряжением мышц конечности),, при котором совершаются повторяющиеся циклы сгибания/разгибания поврежденной конечности в заданном при диагностике угла диапазоне, а скорость сгибания/разгибания зависит от распределения усилия нажатия стопы пациента на ложемент 17 стопы. При сгибании скорость будет тем выше, чем сильнее пациент давит на ложемент 17 носком, если давление отсутствует, то движение прекращается. При разгибании скорость будет тем выше, чем сильнее пациент давит на ложемент 17 пяткой, если давление отсутствует, то движение прекращается;
Активный (с напряжением мышц конечности), при котором направление перемещения (сгибание или разгибание), а также скорость движения зависит от уровня напряжения биосигнала соответствующих мышц бедра, контролируемого блоками 23 и 33;
Пассивный проработки голеностопа (без напряжения мышц голени и стопы), при котором совершаются повторяющиеся циклы сгибания/разгибания реабилитируемой стопы в заданном угле диапазоне и с заданной скоростью. Управление направлением и скоростью со стороны пациента не осуществляется.
Возможность интеллектуального выбора и запуска блоком 23 нескольких режимов работы, позволяет постепенно повышать нагрузку, подбирая режим и уровень нагрузки в соответствии с физическим состоянием. А также выборочно формировать нагрузку - если была операция на голени, то можно не сгибать всю ногу, а прорабатывать голень, например. Например, проработать голень в пассивном режиме 5 мин, потом колено в пассивном режиме 5 мин, а потом 10 минут активного режима с минимальной нагрузкой - то есть очень гибко подходить к формированию нагрузки.
Все основные режимы могут проводиться, как в остром периоде, так и в хронической стадии нарушения мозгового кровообращения, при заболеваниях периферической нервной системы (парезы, параличи), а также при травмах костно-мышечного системы (переломы, разрывы сухожилий, контрактуры).
При этом комплекс благодаря единому изобретательскому замыслу группы изобретений позволяет обеспечивать следующие рабочие функции:
- блок 23 осуществляет выбор профиля конкретного пациента перед началом сеанса, а также добавлять нового пациента с указанием персональных данных, таких как ФИО, возраст, рост, вес, анамнез, предварительный диагноз;
производит остановку сеанса при нажатии аварийной кнопки на выносном пульте 25 аварийного выключения;
определяет степень подвижности коленного сустава пациента;
определяет степень снижения мышечной силы пациента и отображать сведения на экране планшетного компьютера, уровень развиваемого пациентом мышечного усилия в соответствии с данным датчиков регистрации биоэлектрического сигнала в виде диаграммы с дополнительным указанием цифрами;
обеспечивает визуальную обратную связь для пациента, выводя на экран планшета информацию об уровне сигнала сгибающих и разгибающих мышц реабилитируемой конечности в виде диаграммы с дополнительным указанием цифрами;
настраивает степень усиления биоэлектрического сигнала пациента, физически представляющего из себя регистрируемую поверхностными электродами разницу электрических потенциалов (в мВ) в районе пролегания реабилитируемых мышц пациента как автоматически, так и вручную;
записывает и сохраняет данные о ходе сеанса (длительность и амплитуду биоэлектрических сигналов в районах реабилитируемых мышц), позволяя проводить анализ эффективности проводимого курса в виде диаграмм, графиков и цифровых значений;
позволяет проводить обработку полученной информации, сбора, хранения, удаления и передачи полученной информации;
обеспечивает беспроводной канал связи Wi-Fi, который должен выполнять соединение блока 23 роботизированной механотерапии нижних конечностей, со встроенным модулем управления» и блока 33 обработки биосигналов для диагностики и активной разработки нижних конечностей, со встроенными датчиком 26 регистрации биоэлектрических сигналов напряжения мышц и датчиком 27 регистрации фонового биоэлектрического сигнала;
производит, при необходимости, остановку сеанса при нажатии вручную аварийной кнопки на выносном пульте 25 аварийного выключения.
Блок 23 с системой искусственного интеллекта действует как программно-технический комплекс с алгоритмом машинного обучения его нейронной компьютерной архитектуры и ведения реляционного списка всей входной информации с базовыми смыслами, соответствующими каждому компоненту входной информации о состоянии контролируемых объектов управления и устройств контроля с возможностью осуществления обмена информацией при получении в реальном времени одной или нескольких ответных реакций с ложементов, ведение набора объектных файлов, содержащих информацию, касающуюся всех блоков и ситуаций, которые встречались ранее, хранения набора соответствующих ответных файлов и показателей для каждой ответной реакции в виде адаптивного поведения объектов управления, определения типа и извлечения базового смысла поступающей входной информации о текущем состоянии контролируемых конструктивных элементов для выбора соответствующего адаптивного поведения объектов управления исходя из комбинации компонентов входной информации и формирования наиболее приемлемой ответной реакции, сгруппированной всем процедурам. Обработка сигналов поступающей входной информации включает в себя сбор записанных электрических импульсов, их фильтрацию и обработку данных.
После сеанса реабилитационных упражнений платформа 1 выкатывается из палаты и не требует специального места размещения как в палате, так и в отдельном помещении.
Блок 23 с системой искусственного интеллекта по имеющейся в нем базе об адаптивном поведении в ситуациях, которые встречались ранее, результатам извлечения базового смысла поступающей входной информации о текущем состоянии контролируемых конструктивных элементов и об активации пациентом мышечных и сухожильных рецепторов и попытке сделать движение постоянный поток нервных импульсов, поступающих в центральную нервную систему от органов чувств, воспринимающих информацию как от внешних раздражителей поддерживает постоянный уровень возбуждения мотонейронов и интернейронной сети. Активируемая потоком нервных импульсов генераторная активность спинного мозга начинает постепенно формировать устойчивую структуру связей и восстанавливать двигательные координации. При этом структура потока нервных импульсов, его пространственно-временной шаблон (схема-образ), действующий как направляющее представление или чувственное понятие, были максимально приближены к тому, чтобы чувственное восприятие и мышление закрепляли физиологические двигательные закономерности, как они существуют в природе. Соответствующая активация спинномозговых двигательных рефлексов служит как полноценная двигательная реабилитация при использовании заявляемого комплекса, поскольку тренируемые в сеансе механотерапии движения максимально коррелированы и синхронизированы с собственными управляющими нервными импульсами пациента, что обеспечивает обратное благоприятное развитие атрофических и дегенеративных процессов, нормализацию функциональной целостности и деятельности организма, т.е. высокую эффективность реабилитации.
Повышение стато-кинетической устойчивости неизбежно связано с рефлекторным формированием приятного тона эмоциональных ощущений, благодаря подавлению симптоматики болезни движения и торможения проявления неприятного тона эмоциональных ощущений, в том числе, и при сопряжении кушетки 35 с платформой 1 и механотренажером.. Одновременно повышение устойчивости вестибулярных реакций сопровождается повышением качеств нервной активности: силы, уравновешенности, подвижности, что благоприятно сказывается на координации нейро-моторного реагирования в стрессорной ситуации организма.
После того как будет выполнено заданное количество циклов сгибания/разгибания (шагов) или закончится отведенное на упражнение время упражнение завершается.
Каждый из шарнирно-рычажных механизмов образован криволинейными звеньями 53,54, 52, 43,44, которые выполнены из пластин и имеют кривизну и изгибы, обеспечивающие однозначность направления продольного и поперечного изгиба при любом направлении или рассогласовании нагрузки на этих звеньях. Наличие точек перегиба звеньев 43,44 увеличивает значение критической силы достаточной для нарушения продольной устойчивости.
Одновременно между первым и вторым двоякоизогнутыми (имеющими два плавно сопряженных участка кривизны противоположных направлений) в вертикальной плоскости замыкающими звеньями 43,44, каждого из шарнирно-рычажных механизмов трансмиссии образован замкнутый пространственный контур из криволинейных и изогнутых звеньев 51-54 ложементов 19,15 бедра и голени. Замкнутый пространственный контур перемычкой 51 ложемента 19 бедра и средними звеньями 54 ложемента 15 голени, кинематически связан с обоими шарнирно-рычажными механизмами и служит для синхронизации и уравновешивания замыкающих звеньев 43,44,, что направлено на недопущение рывков, рассогласования движения, возникновения мертвых положений и/или автоколебаний и сохранение стато-кинетической устойчивости. Кроме того, криволинейные звенья трансмиссии, выполненные в виде пластин, обладают определенными упругими (пружинными) свойствами, позволяющими ложементам 19,15 самоустанавливаться при сборке и предварительной "обкатке" трансмиссии, компенсировать, тем самым, производственные отклонения размеров и формы сопрягаемых элементов трансмиссии, и занять в ней анатомически оптимальное положение, а также компенсировать случайные движения конечности пациента.
В результате регулярного проведения без переходов в другие палаты и существенного стеснения персонала и других пациентов оптимизированных на данном устройстве сеансов механотерапии у пациентов быстрее восстанавливается мышечная активность, увеличивается скорость реакции, а также мышечная масса, уменьшается спастика и уровень нейропатических болей. Всем этим удается обеспечить приверженность пациентов к процедуре реабилитации, проводимой с помощью комплекса, и, тем самым, окончательное выздоровление и успешное возвращение пациентов к обычному образу жизни в кратчайшие сроки.
В целом заявленная группа изобретений обеспечивает:
- повышение плавности перемещения реабилитируемой конечности;
- повышение безопасности работы с устройством, так как изделие всегда находится в устойчивом и контролируемом положении, как при перемещении, так и при проведении механотерапии;
- увеличение охвата органов реабилитируемой конечности, а именно реабилитация всех групп мышц и суставов реабилитируемой конечности;
- повышение мобильности позволяющей перемещать комплекс в палату и из палаты (если пациента нельзя перемещать) и доступности комплекса для персонала и пациента (улучшение эргономичности), поскольку Т-образная платформа (тележка) позволяет ставить платформу вплотную к кровати/кушетке, независимо от того, есть ли под ней свободной пространство для заведения колес, возможность регулировки по высоте позволяет адаптировать высоту аппарата под любую кровать/кушетку;
- оперативно осуществляемые в условиях постельного режима задействование и механическое реабилитационное воздействие с использованием комплекса за счет смещения сроков сопряжения и размещения конечности на ложементах механотренажера, и начала реабилитации на самый ранний период медицинской помощи благодаря минимизации расходования времени на подготовительные операции, т.е. на первом этапе (в том числе, в отделениях реанимации и специализированных отделениях стационаров);
- позволяет повысит вовлеченность пациента в терапию, сфокусировать его внимание на тренировке и конкретных задачах;
- платформа 1, имеющая Т-образную конфигурацию, позволяет выполнить основание 3 и раму 7 минимальной ширины, а направляющие 8 - минимальной длины, что позволяет сократить трудозатраты персонала и сокращает время приведения комплекса в рабочее состояние;
- дисплей 24 и поперечная балка 50 практически не мешают доступу персонала для обслуживания соседних пациентов в палате, причем пациент имеет наилучшую возможность для комфортного наблюдения за параметрами упражнений, отражаемыми на поворотном дисплее 24. Это позволяет пациенту объективно контролировать и постепенно наращивать усилие мышц реабилитируемой конечности 32, и синхронизировать собственное усилие с нагрузками, формируемыми механотренажером, повышая тем самым эффективность и сокращая длительность курса реабилитации;
- обеспечение оптимального числа датчиков, биологических обратных связей.
Оригинальное художественно-конструкторское решение делает комплекс в целом и механотренажер в его составе привлекающим внимание потребителей. Объемно-пластическая проработка позволила в итоге получить художественный образ с высокими эстетическими свойствами, обладающий высокой функциональной приспособленностью для реабилитации конечности. Заявляемое решение создает целостный художественный образ устройства, отвечающий современным требованиям технической эстетики. Одновременно фантазийная сложная форма построения конструктивных элементов механотренажера является важным стилистическим акцентом внешнего вида комплекса, который делает его интересным и нестандартным, создает ведущую ноту, от которой приобретает индивидуальность вся композиция. В целом зрительный образ создает ощущение высокого качества изделия.
Таким образом, обеспечена высокая эргономичность комплекса в целом и его функциональной составной части (механотренажера) - приспособленность для оптимального применения в медицинских учреждениях с различной структурой и планировкой в широком диапазоне режимов, наличие условий, возможностей для удобного использования и удовлетворения потребностей медицинских служб и пациентов в проведении реабилитации.
Технический результат, достигаемый при использовании заявляемой группы изобретений, заключается в реализации его назначения - осуществление реабилитации нижних конечностей, за счет создания альтернативной конструкции реабилитационного комплекса, обладающей высокой эффективностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы | 2024 |
|
RU2830990C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Способ восстановления двигательной активности верхней и нижней конечностей человека | 2017 |
|
RU2644295C1 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| Устройство для разработки суставов нижних конечностей | 1987 |
|
SU1443900A1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2007 |
|
RU2352316C1 |
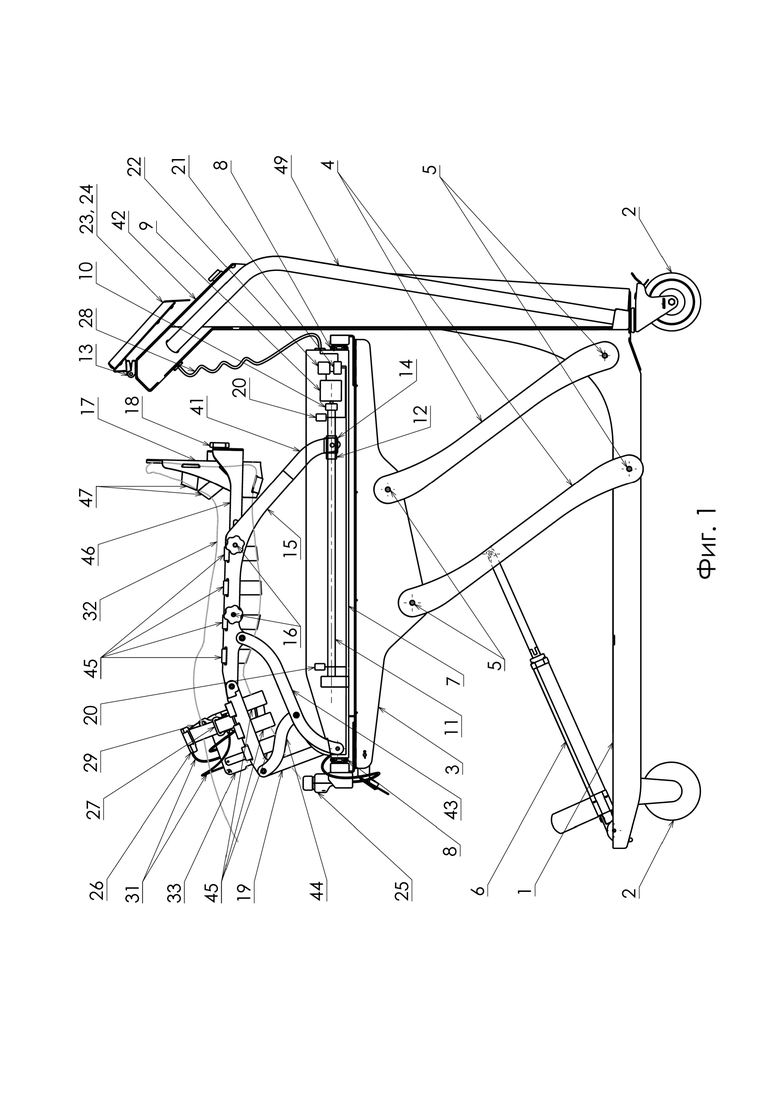
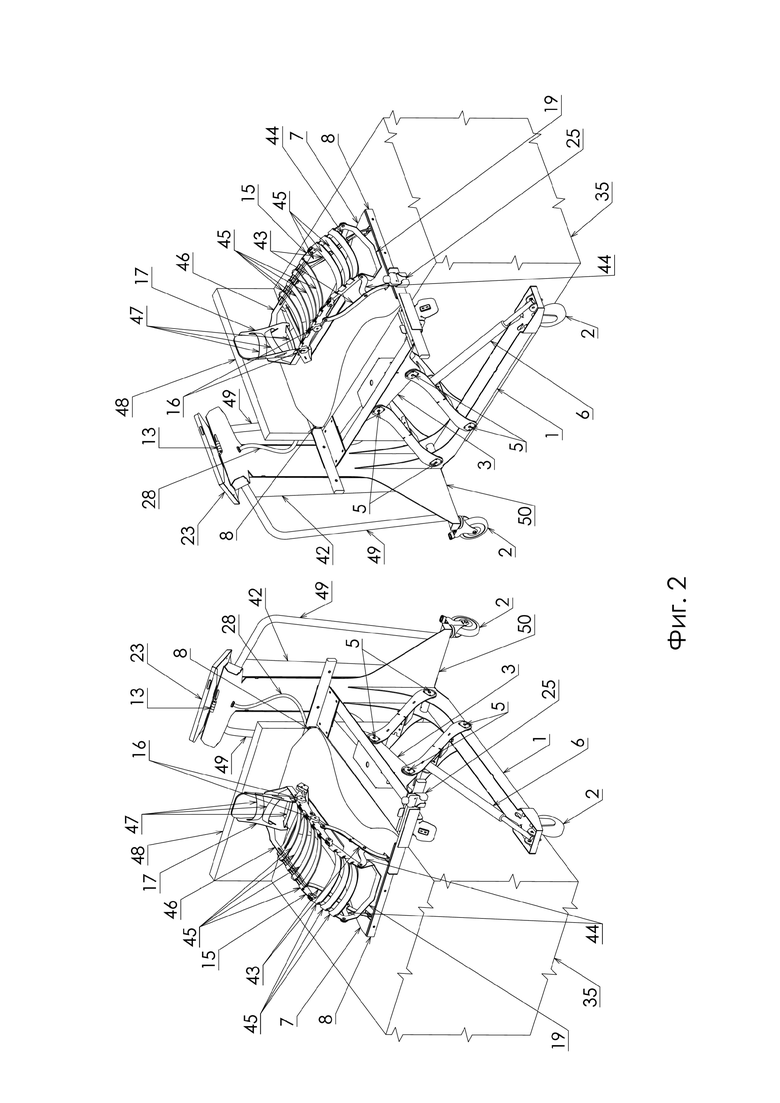
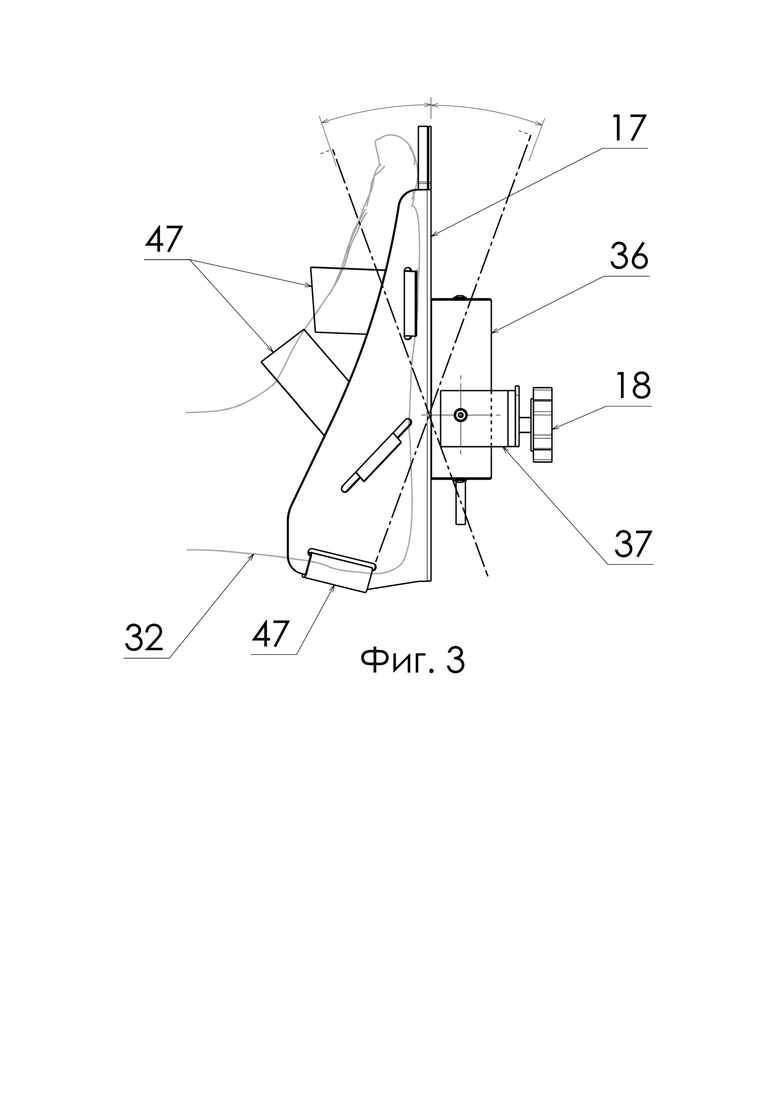

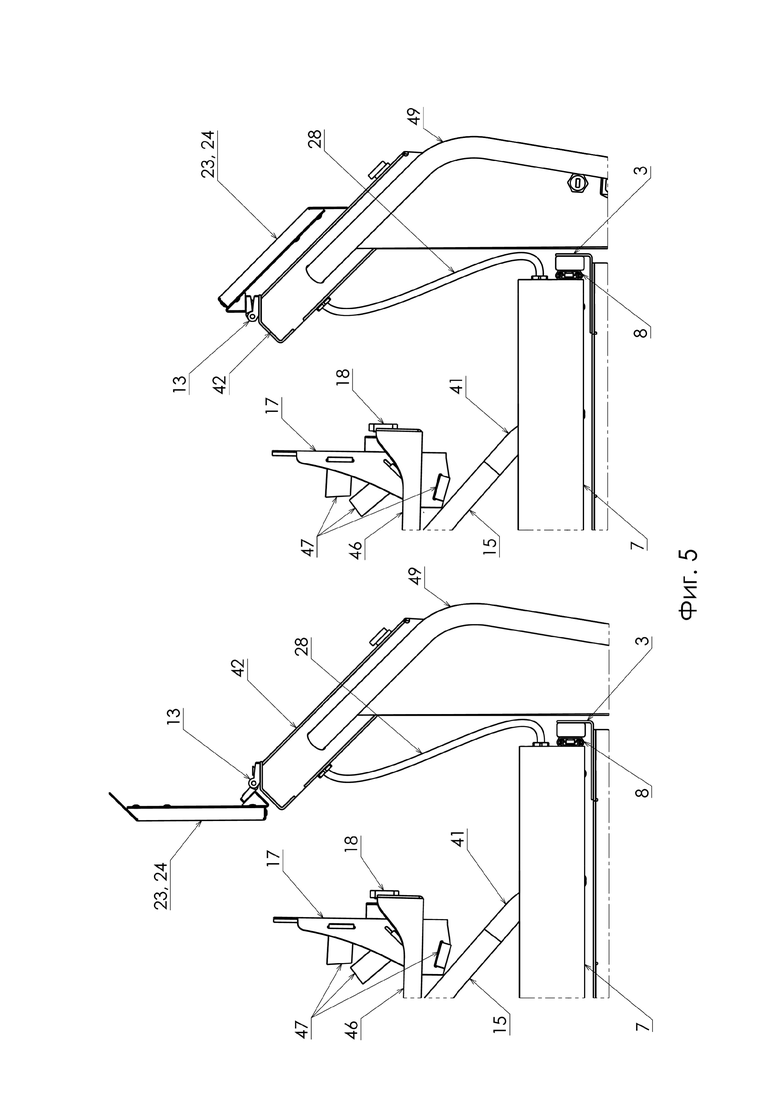

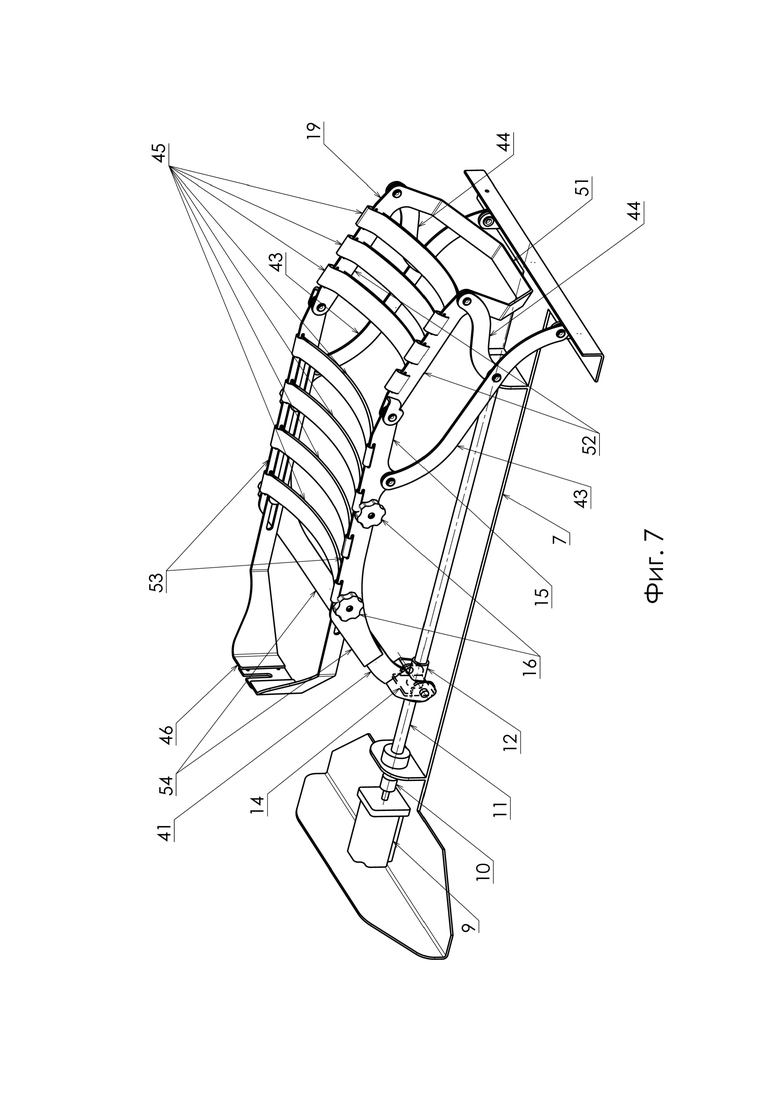
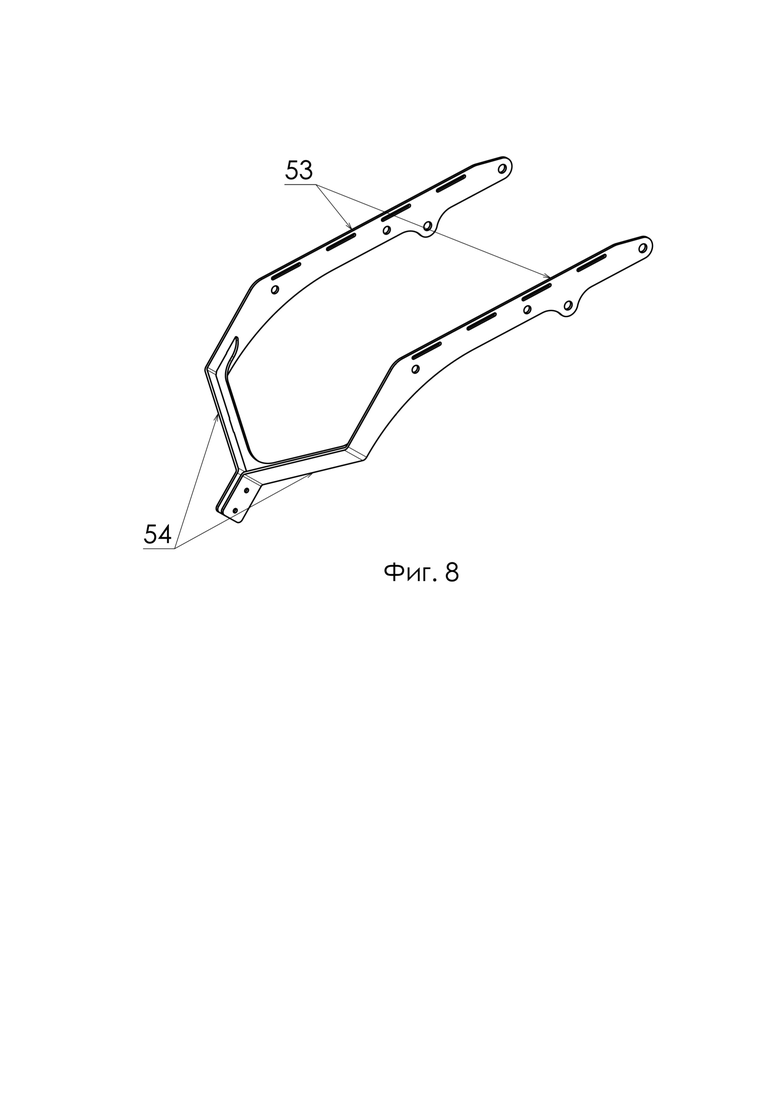



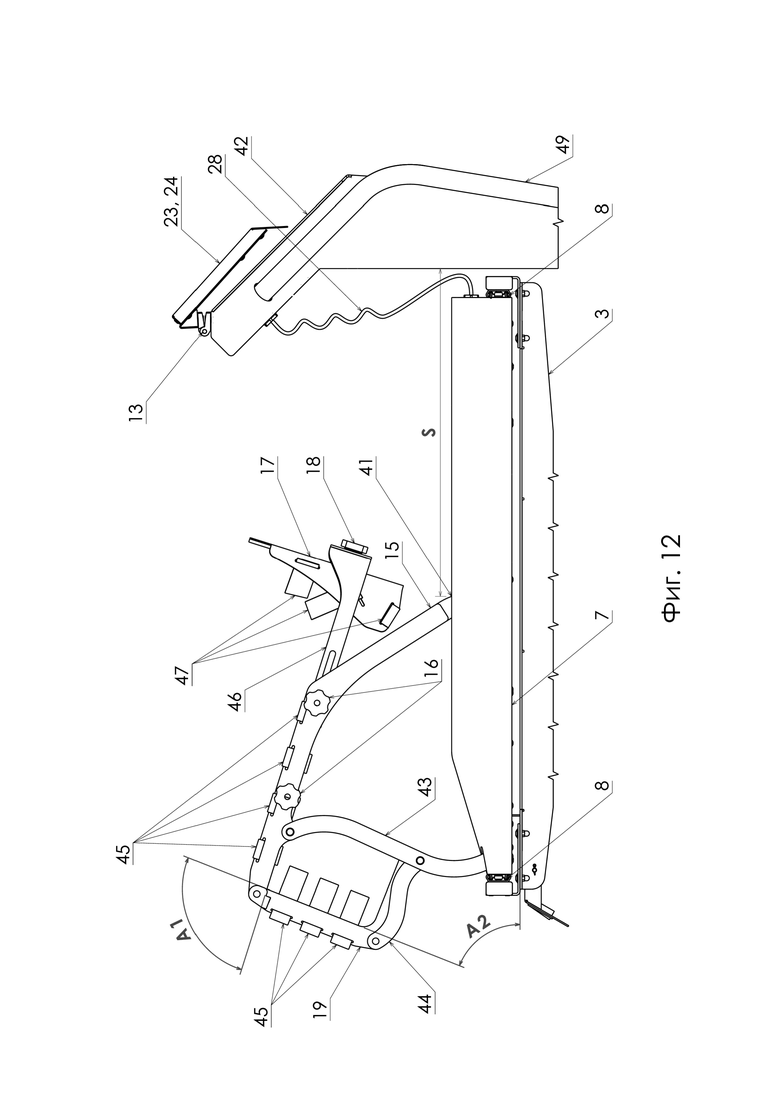
Группа изобретений относится к медицинской технике. Реабилитационный комплекс для нижних конечностей содержит размещенные на мобильной платформе блок запуска и контроля режимов реабилитации и механотренажер с рамой. Рама механотренажера установлена с возможностью поперечного перемещения на основании. Механотренажер включает продольный привод поступательного перемещения, связанный с каркасом ложа для размещения реабилитируемой конечности. Мобильная платформа выполнена Т-образной в конфигурации, образованной поперечной балкой и продольной балкой, расположенной вдоль основания мобильной платформы и снабженной колесом на свободном конце. Поперечная балка снабжена парой колес. Шарнирно-рычажные механизмы трансмиссии механотренажера снабжены каждый первым и вторым изогнутыми замыкающими звеньями с плавным перегибом. Замыкающие звенья установлены с обеих наружных сторон трансмиссии и связаны шарнирами на своих концах с каркасом ложа для размещения реабилитируемой конечности и с рамой механотренажера. Механотренажер реабилитационного комплекса для нижних конечностей содержит размещенный на раме продольный привод поступательного перемещения, связанный трансмиссией с каркасом ложа для размещения реабилитируемой конечности. Каркас ложа образован из ложемента бедра и ложемента голени, которые выполнены в виде рамок, образованных из звеньев. Обеспечиваются улучшенные показатели эргономики и функционирования тренажеров, позволяющие применять их с высокой эффективностью в условиях постельного режима. 2 н. и 29 з.п. ф-лы, 12 ил.
1. Реабилитационный комплекс для нижних конечностей, содержащий размещенные на мобильной платформе блок запуска и контроля режимов реабилитации, размещенный на стойке, и механотренажер с рамой, который включает связанный каналом связи с блоком запуска и контроля режимов реабилитации блок обработки биосигналов датчика биоэлектрических сигналов напряжения мышц и датчика фонового биоэлектрического сигнала, отличающийся тем, что рама механотренажера установлена с возможностью поперечного перемещения на основании, регулируемом по высоте относительно платформы, при этом механотренажер включает продольный привод поступательного перемещения, связанный с каркасом ложа для размещения реабилитируемой нижней конечности трансмиссией, шарнирно-рычажные механизмы которой расположены с двух сторон от продольного привода поступательного перемещения, приводной двигатель которого связан с блоком запуска и контроля режимов реабилитации, а каретка - с ведущим звеном трансмиссии, сопряженным с обоими шарнирно-рычажными механизмами, мобильная платформа выполнена Т-образной в конфигурации, образованной поперечной балкой и продольной балкой, расположенной вдоль основания мобильной платформы и снабженной по меньшей мере одним колесом на свободном конце, при этом поперечная балка снабжена парой колес, установленных на ее концах, шарнирно-рычажные механизмы трансмиссии механотренажера снабжены каждый первым и вторым замыкающими звеньями, выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено выполнено с шарнирами на концах и с промежуточным шарниром, а второе замыкающее звено - с шарнирами на концах, причем первое и второе замыкающие звенья установлены с обеих наружных сторон трансмиссии и связаны шарнирами на своих концах с каркасом ложа для размещения реабилитируемой нижней конечности и с рамой механотренажера.
2. Реабилитационный комплекс по п.1, отличающийся тем, что мобильная платформа снабжена стойкой, соединенной ребрами жесткости с балками мобильной платформы.
3. Реабилитационный комплекс по п.2, отличающийся тем, что блок запуска и контроля режимов реабилитации выполнен с сенсорным дисплеем, который установлен на стойке мобильной платформы с помощью шарнира, с возможностью поворота для визуального доступа экрана дисплея для пациента.
4. Реабилитационный комплекс по любому из пп.1-3, отличающийся тем, что основание мобильной платформы и рама механотренажера снабжены линейными направляющими с возможностью поперечного перемещения рамы с механотренажером.
5. Реабилитационный комплекс по любому из пп.1-3, отличающийся тем, что ложе для размещения реабилитируемой нижней конечности снабжено поперечными параллельными ламелями из эластичного материала с мягкими прокладками.
6. Реабилитационный комплекс по любому из пп.1-3, отличающийся тем, что мобильная платформа оснащена подъемным устройством для регулирования по высоте положения основания с рамой относительно мобильной платформы.
7. Реабилитационный комплекс по п.6, отличающийся тем, что подъемное устройство для регулирования по высоте положения основания с рамой относительно мобильной платформы выполнено с телескопическим электромеханическим приводом подъемного устройства и с механизмом адаптации положения основания, образованным шарнирно установленными криволинейными коромыслами для регулирования положения основания с рамой по высоте.
8. Реабилитационный комплекс по п.6, отличающийся тем, что подъемное устройство для регулирования по высоте положения основания с рамой относительно мобильной платформы выполнено с пневматическим или гидравлическим сервоприводом или по меньшей мере одной телескопической колонной.
9. Реабилитационный комплекс по п.1, отличающийся тем, что каркас ложа для размещения реабилитируемой нижней конечности образован из ложемента бедра и ложемента голени, выполненных в виде рамок из шарнирно связанных между собой встречными концами их боковых звеньев.
10. Реабилитационный комплекс по п.9, отличающийся тем, что первое и второе замыкающие звенья и боковые звенья ложемента бедра и боковые звенья ложемента голени выполнены в виде пластин, ориентированных вертикально между замыкающими звеньями.
11. Реабилитационный комплекс по любому из пп.1-3, 7-10, отличающийся тем, что он снабжен ложементом стопы и присоединительным элементом для монтажа ложемента стопы, выполненным в виде панели, соединенной переставляемыми винтами с боковыми звеньями ложемента голени.
12. Реабилитационный комплекс по п.11, отличающийся тем, что ложемент стопы со стороны размещения подошвы стопы снабжен ремнями фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагрузки на стопу из группы, включающей реверсивный электродвигатель ложемента стопы для попеременного нагружения пятки и/или носка и по меньшей мере один съемный датчик ложемента стопы для измерения усилия нагружения стопы, электрически связанные с блоком запуска и контроля режимов реабилитации.
13. Реабилитационный комплекс по любому из пп.1-3, 7-12, отличающийся тем, что продольный привод поступательного перемещения выполнен в виде винтовой передачи с ходовым винтом и с гайкой, соединенной с кареткой для перемещения на резьбе ходового винта, приводной двигатель продольного привода поступательного перемещения выполнен в виде реверсивного шагового электродвигателя, сопряженного с ходовым винтом, каретка которого шарнирно соединена с ведущим звеном трансмиссии, при этом приводной двигатель продольного привода поступательного перемещения сопряжен с ходовым винтом винтовой передачи соединительным устройством из группы: муфта, волновая передача, ременная передача.
14. Реабилитационный комплекс по любому из пп.1-3, 7-13, отличающийся тем, что блок запуска и контроля режимов реабилитации и блок обработки биосигналов датчика регистрации биоэлектрических сигналов напряжения мышц и датчика регистрации фонового биоэлектрического сигнала связаны между собой по проводному или беспроводному каналу связи, при этом комплекс снабжен выносным пультом аварийного выключения приводного двигателя продольного привода поступательного перемещения, электрически связанным с блоком запуска и контроля режимов реабилитации, выполненным с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
15. Реабилитационный комплекс по п.14, отличающийся тем, что он снабжен микроконтроллером резервного аварийного управления приводным двигателем привода поступательного перемещения, а также концевыми выключателями, установленными с возможностью взаимодействия с кареткой, и блоком управления приводным двигателем привода поступательного перемещения для передачи на блок запуска и контроля режимов реабилитации и на микроконтроллер резервного аварийного управления приводным двигателем привода поступательного перемещения информации о положении каретки привода поступательного перемещения.
16. Реабилитационный комплекс по п.15, отличающийся тем, что концевые выключатели, выносной пульт аварийного выключения, приводной двигатель привода поступательного перемещения, реверсивный электродвигатель ложемента стопы, датчик ложемента стопы для измерения усилия нагружения стопы, датчик регистрации биоэлектрических сигналов напряжения мышц и датчик регистрации фонового биоэлектрического сигнала, а также блок управления приводным двигателем привода поступательного перемещения электрически скоммутированы с микроконтроллером резервного аварийного управления приводным двигателем привода поступательного перемещения, который связан по проводному или беспроводному каналу связи с блоком запуска и контроля режимов реабилитации, причем микроконтроллер резервного аварийного управления приводным двигателем привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления приводным двигателем привода поступательного перемещения и реверсивным электродвигателем ложемента стопы в случае потери связи или выхода из строя блока запуска и контроля режимов реабилитации.
17. Реабилитационный комплекс по п.16, отличающийся тем, что блок запуска и контроля режимов реабилитации выполнен с возможностью формирования базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками.
18. Механотренажер реабилитационного комплекса для нижних конечностей, содержащий размещенный на раме привод, отличающийся тем, что привод представляет собой продольный привод поступательного перемещения, связанный трансмиссией с каркасом ложа для размещения реабилитируемой нижней конечности, образованным из шарнирно связанных между собой ложемента бедра и ложемента голени, интегрированных в шарнирно-рычажные механизмы трансмиссии, расположенные с двух сторон от продольного привода поступательного перемещения, приводной двигатель которого связан с кареткой, шарнирно соединенной с ведущим звеном трансмиссии, сопряженным с обоими шарнирно-рычажными механизмами трансмиссии,
шарнирно-рычажные механизмы снабжены каждый первым и вторым замыкающими звеньями, выполненными изогнутыми с плавным перегибом, из которых первое замыкающее звено выполнено с шарнирами на концах и с промежуточным шарниром, а второе замыкающее звено - с шарнирами на концах, причем первое и второе замыкающие звенья установлены с обеих наружных сторон трансмиссии и соединены между собой с помощью промежуточного шарнира первого замыкающего звена, сопряженного с одним из шарниров второго замыкающего звена, другой шарнир которого соединен с ложементом бедра, а первое замыкающее звено соединено шарнирами на своих концах с ложементом голени и с рамой,
каркас ложа для размещения реабилитируемой нижней конечности образован из ложемента бедра и ложемента голени, выполненных в виде рамок из шарнирно связанных между собой встречными концами их боковых звеньев, при этом:
- ложемент голени выполнен в виде рамки, образованной из звеньев, из которых средние звенья жестко соединены между собой и с ведущим звеном трансмиссии, а два боковых звена расположены параллельно и выполнены каждое с шарниром на конце и со средним шарниром, расположенным между ними, причем каждое боковое звено соединено шарниром на своем конце с боковым звеном ложемента бедра, а средним шарниром - с одним концом первого замыкающего звена,
- ложемент бедра выполнен в виде рамки, образованной из звеньев, средние из которых расположены с образованием перемычки, а два параллельных боковых звена выполнены с шарнирами на своих концах и соединены каждое одним из этих шарниров с боковым звеном ложемента голени, а вторым сопряжено с шарниром на конце второго замыкающего звена, другой конец которого сопряжен с промежуточным шарниром первого замыкающего звена, шарнирно закрепленного на раме своим концом, противоположным концу, сопряженному со средним шарниром бокового звена ложемента голени.
19. Механотренажер по п.18, отличающийся тем, что первое и второе замыкающие звенья и боковые звенья ложемента бедра и боковые звенья ложемента голени выполнены в виде пластин, ориентированных вертикально между замыкающими звеньями, а боковые звенья ложементов голени и бедра снабжены поперечными параллельными ламелями из эластичного материала с мягкими прокладками.
20. Механотренажер по любому из пп.18, 19, отличающийся тем, что он снабжен ложементом стопы и присоединительным элементом для монтажа ложемента стопы к механотренажеру, выполненным в виде панели, соединенной переставляемыми винтами с боковыми звеньями ложемента голени.
21. Механотренажер по п.20, отличающийся тем, что ложемент стопы со стороны размещения подошвы стопы снабжен ремнями фиксации стопы, а с противоположной стороны выполнен с возможностью монтажа средств воздействия и контроля нагружения стопы из группы, включающей реверсивный электродвигатель ложемента стопы для попеременного нагружения пятки и/или носка и по меньшей мере один съемный датчик ложемента стопы для измерения усилия нагружения стопы.
22. Механотренажер по любому из пп.18-21, отличающийся тем, что он дополнительно содержит блок обработки биосигналов датчика регистрации биоэлектрических сигналов напряжения мышц и датчика регистрации фонового биоэлектрического сигнала, выполненных в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани бедра реабилитируемой конечности, снабженных эластичной фиксирующей манжетой, выполненной с возможностью переустановки указанных датчика регистрации биоэлектрических сигналов напряжения мышц и датчика регистрации фонового биоэлектрического сигнала на реабилитируемой конечности.
23. Механотренажер по п.22, отличающийся тем, что снабжен по меньшей мере одной группой дополнительных датчиков регистрации биоэлектрических сигналов напряжения мышц и датчиков регистрации фонового биоэлектрического сигнала в виде биполярных датчиков регистрации разности потенциалов между двумя точками ткани реабилитируемой конечности, снабженных эластичной фиксирующей манжетой, выполненной с возможностью переустановки дополнительных датчика регистрации биоэлектрических сигналов напряжения мышц и датчика регистрации фонового биоэлектрического сигнала, на реабилитируемой конечности и по меньшей мере одним датчиком физиологического состояния пациента из группы: датчики температуры, пульса и давления.
24. Механотренажер по любому из пп.18-23, отличающийся тем, что продольный привод поступательного перемещения выполнен в виде винтовой передачи с ходовым винтом и с гайкой, соединенной с кареткой, для перемещения на резьбе ходового винта, приводной двигатель продольного привода поступательного перемещения выполнен в виде реверсивного шагового электродвигателя, сопряженного соединительным устройством с ходовым винтом винтовой передачи, снабженной концевыми выключателями, установленными с возможностью взаимодействия с кареткой продольного привода поступательного перемещения, которая шарнирно соединена с ведущим звеном трансмиссии с возможностью преобразования поступательного перемещения каретки продольного привода поступательного перемещения в поворотное движение боковых звеньев ложементов голени и бедра, причем приводной двигатель продольного привода поступательного перемещения соединен с ходовым винтом винтовой передачи соединительным устройством из группы: муфта, волновая передача, ременная передача.
25. Механотренажер по любому из пп.18-24, отличающийся тем, что он выполнен с возможностью размещения рамы на основании мобильной платформы, образованной из двух балок, соединенных между собой с образованием Т-образной в плане конфигурации, снабженной стойкой, оснащенной поперечными линейными направляющими для рамы и подъемным устройством для регулирования по высоте положения основания с рамой относительно мобильной платформы, а также имеет блок запуска и контроля режимов реабилитации, выполненный с сенсорным дисплеем, который установлен на стойке мобильной платформы с помощью шарнира, с возможностью поворота и визуального доступа экрана дисплея для пациента.
26. Механотренажер по п.25, отличающийся тем, что он выполнен с возможностью размещения его рамы на основании мобильной платформы реабилитационного комплекса, оснащенной подъемным устройством для регулирования по высоте положения основания с рамой относительно мобильной платформы, которое выполнено с телескопическим электромеханическим приводом подъемного устройства и механизмом адаптации положения основания, образованным двумя криволинейными шарнирно установленными параллельно с возможностью совместного поворота коромыслами для регулирования положения основания с рамой по высоте.
27. Механотренажер по п.25, отличающийся тем, что он выполнен с возможностью размещения его рамы на основании мобильной платформы реабилитационного комплекса, оснащенной подъемным устройством для регулирования по высоте положения основания с рамой относительно мобильной платформы, которое выполнено с пневматическим или гидравлическим сервоприводом или по меньшей мере одной телескопической колонной.
28. Механотренажер по любому из пп.22, 23, отличающийся тем, что он выполнен с возможностью подключения к блоку запуска и контроля режимов реабилитации блока обработки биосигналов датчика регистрации биоэлектрических сигналов напряжения мышц и датчика регистрации фонового биоэлектрического сигнала, связанных между собой по проводному или беспроводному каналу связи, при этом комплекс снабжен выносным пультом аварийного выключения механотренажера, установленным на раме, выполненным с возможностью взаимодействия с блоком запуска и контроля режимов реабилитации, а также с возможностью доступа в сеть Интернет и обмена данными с удаленным сервером.
29. Механотренажер по п.28, отличающийся тем, что он снабжен микроконтроллером резервного аварийного управления приводным двигателем привода поступательного перемещения и блоком управления приводным двигателем привода поступательного перемещения, выполненными с возможностью передачи на блок запуска и контроля режимов реабилитации информации о положении каретки привода поступательного перемещения.
30. Механотренажер по п.29, отличающийся тем, что концевые выключатели, выносной пульт аварийного выключения, приводной двигатель привода поступательного перемещения, реверсивный электродвигатель ложемента стопы и датчик ложемента стопы для измерения усилия нагружения ложемента стопы, датчик регистрации биоэлектрических сигналов напряжения мышц, датчик фонового биоэлектрического сигнала, а также датчики физиологического состояния пациента и блок управления приводным двигателем привода поступательного перемещения выполнены с возможностью обмена информацией с микроконтроллером резервного аварийного управления приводным двигателем привода поступательного перемещения, который выполнен с возможностью обмена информацией по проводному или беспроводному каналу связи с блоком запуска и контроля режимов реабилитации, при этом микроконтроллер резервного аварийного управления приводным двигателем привода поступательного перемещения выполнен с возможностью осуществления резервного аварийного управления приводным двигателем привода поступательного перемещения и реверсивным электродвигателем ложемента стопы в случае потери связи или выхода из строя блока запуска и контроля режимов реабилитации.
31. Механотренажер по п.30, отличающийся тем, что микроконтроллер резервного аварийного управления приводным двигателем привода поступательного перемещения выполнен с возможностью обмена информацией с блоком запуска и контроля режимов реабилитации комплекса, выполненным с возможностью формирования базы данных и анализа всех поступающих к нему данных посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети, обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером для определения и текущей корректировки длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности, а также статистического анализа базы данных с информацией по проведенным упражнениям для данного пациента, а также пациентов со схожими анатомическими и физиологическими характеристиками.
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| US 2006106326 A1, 18.05.2006 | |||
| US 2003028130 A1, 06.02.2003 | |||
| EP 3056182 A1, 17.08.2016 | |||
| CN 108113849 A, 05.06.2018 | |||
| DE 69610326 T2, 22.02.2001 | |||
| WO 2009016478 A2, 05.02.2009. | |||

