Изобретение относится к системам управления ответственными технологическими процессами, в частности к системам управления движением поездов на железнодорожном транспорте.
Известен способ контроля работы устройств управления (см. патент РФ №2406635, МПК B61L 23/16. Способ контроля свободности рельсовой линии, входящей в зависимость светофора). Этот способ заключается в том, что при проследовании поезда по участку осуществляется последовательная проверка работы устройств управления светофором, заключающаяся в проверке:
- работы шунтового режима рельсовых цепей;
- отключения питания разрешающих огней на светофоре;
- работы устройств, контролирующих свободность рельсовых линий при проследовании по ним подвижной единицы;
- работы устройств, контролирующих свободность рельсовых линий при освобождении их подвижной единицей;
- отсутствия контроля ложной свободности рельсовой линии при отключении их питания с последующим контролем отсутствия их ложной свободности (занятости) при подключении питания рельсовых линий (в нормальном режиме);
- общей правильности работы приборов рельсовой цепи в нормальном и шунтовом режимах.
На основании результатов этой проверки осуществляется включение разрешающего показания светофора.
Реализация этого способа контроля основана на применении устройств управления светофором, построенных на электромагнитных реле. При применении этого способа контроль правильности работы устройства осуществляется только при проследовании поездом участка рельсовой линии, входящей в зависимость светофора. Это допустимо при использовании реле специальной конструкции, исключающей возникновение в них неконтролируемых отказов. При построении устройства управления на электронной элементной базе возможно появление неконтролируемых состояний при длительном отсутствии поездов, т.е. при большом перерыве между моментами контроля работы устройства, что и является недостатком рассмотренного способа.
Известен также способ контроля работы устройства управления, построенного на микропроцессорной элементной базе (см. учебник «Устройства железнодорожной автоматики, телемеханики и связи», 2006, ч. 1, стр. 533). Данный способ основан на применении двух идентичных комплектов аппаратуры, работающих синхронно. Контроль их правильной работы осуществляется путем сравнения между собой сигналов на соответствующих контрольных точках комплектов и разрешения выдачи команды управления при их совпадении или запрещении выдачи этой команды в противном случае.
Недостатком этого способа является необходимость отдельного контроля работы каждого управляющего устройства в сложной системе, содержащей несколько таких устройств. Это приводит к значительному усложнению этих устройств и снижению общей надежности всей системы.
Наиболее близким к заявляемому способу по максимальному количеству сходных признаков является способ контроля работы двухканальной системы для регулирования движения железнодорожных транспортных средств (патент РФ №2286279, МПК B61L 27/04, G06F 11/00), который выбран в качестве прототипа. Способ заключается в том, что в процессе работы двухканальной микропроцессорной системы сигналы на одноименных контрольных точках устройств каждого из двух каналов сравниваются между собой и при положительном результате этого сравнения выдается выходной сигнал на объект управления.
Недостатком этого способа является то, что при его применении в сложной многомодульной, многовыходной или многофункциональной системе требуется отдельный контроль правильности работы каждого функционального модуля и значения каждого его выходного сигнала. Кроме того, в моменты времени, когда какие-либо функции не выполняются отдельным модулем, возникает возможность появления его неконтролируемого состояния, которое может быть опасным для управляемого системой процесса. Выявление таких состояний требует применения специальных контролирующих средств, что снижает эффективность системы, ее быстродействие, повышает стоимость ее проектирования и внедрения.
В основу предлагаемого изобретения положена определенная последовательность действий при контроле работы устройства управления ответственными объектами, позволяющая осуществлять контроль состояний этого устройства, как при наличии управляющих воздействий, так и при их отсутствии.
Поставленная цель достигается тем, что в известном способе контроля свободности рельсовой линии, входящей в зависимость светофора, кроме проверки работы устройств рельсовой цепи во время и после проследования поезда, т.е. при выполнении устройством его основной функции, производится периодическая тестовая проверка работы устройства во всех режимах.
Благодаря проведению периодического тестирования значительно повышается безопасность функционирования устройства, упрощается структура его построения, расширяется область применения.
Заявляемый способ может быть использован в любых управляющих устройствах, независимо от их назначения, области применения и используемой элементной базы. Так, логические управляющие устройства могут быть построены на основе средств вычислительной техники, микропроцессоров, цифровых или аналоговых элементов.
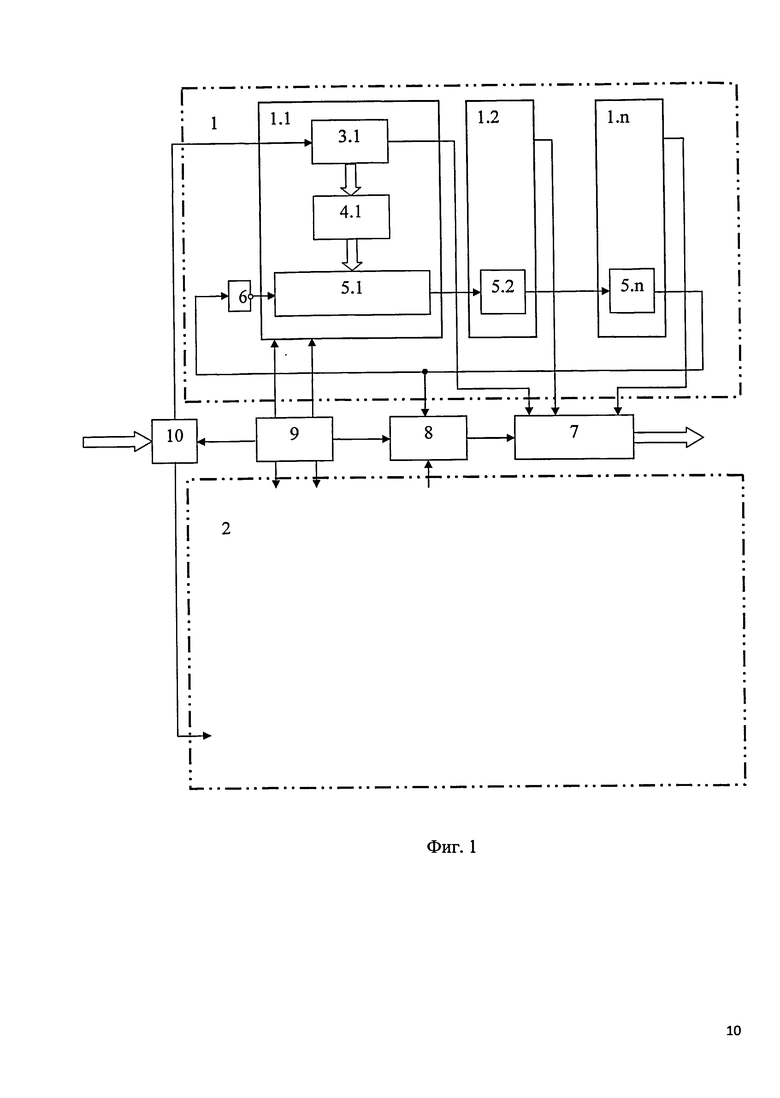
На фиг. 1 показана общая структурная схема устройства, реализующего предлагаемый способ контроля, где приведены следующие элементы:
1, 2 - соответственно первый и второй идентичные каналы управляющего устройства;
1.1, …, 1.n, 2.1, …, 2.n - соответственно 1, …, n функциональный модуль первого и второго каналов управляющего устройства, каждый функциональный модуль содержит:
3.1 - логический блок;
4.1 - блок накопления контрольных сигналов;
5.1 - преобразователь выходных сигналов блока накопления в последовательность импульсов.
Кроме того, структурная схема устройства содержит:
6 - инвертор;
7 - блок выходных ключей;
8 - блок сравнения последовательностей импульсов;
9 - блок управления и генерации тестовых последовательностей;
10 - блок входов.
В структурной схеме второй канал управляющего устройства вырабатывает контрольные сигналы для их сравнения с аналогичными сигналами первого канала, которое осуществляется после их накопления и преобразования в последовательность импульсов. Поэтому блок выходных ключей подключен только к логическим блокам 3.1, …, 3.n первого канала управляющего устройства.
Способ осуществляется следующим образом (рассмотрим в качестве примера его применение для устройства автоматической блокировки на перегоне железнодорожного транспорта).
При поступлении входных сигналов на блок входов (при проследовании поезда по блок-участку этими сигналами являются сигналы о свободности или занятости участков пути) осуществляется следующая последовательность действий при контроле работы устройства управления:
1 - фиксация входных сигналов блоком входов 10 и передача их в функциональные модули 1.1 и 2.1 соответственно первого и второго каналов управляющего устройства;
2 - обработка входных сигналов логическим блоком 3 в функциональных модулях 1.1 и 2.1;
3 - прием и фиксация в блоке накопления 4 сигналов контроля работы логического блока 3 в функциональных модулях 1.1 и 2.1;
4 - преобразование блоком 5 в функциональных модулях 1.1 и 2.1 выходных сигналов блока накопления 4 в последовательность импульсов.
По пунктам 1…4 последовательности действий выполняются для устройства управления каждым объектом (или для каждого функционального модуля) в первом и втором каналах управляющего устройства. Далее производятся следующие действия:
5 - выработка общей замкнутой через инвертор 6 последовательности контрольных импульсов для всех объектов управления (или для всех функциональных модулей) в первом и втором каналах управляющего устройства;
6 - сравнение в блоке 8 последовательностей контрольных импульсов двух каналов управляющего устройства 1 и 2 между собой по значениям и длительности;
7 - выдача при совпадении сравниваемых в блоке 8 последовательностей контрольных импульсов разрешения управления объектом в блок выходных ключей 7 или запрещение этой выдачи при несовпадении сравниваемых последовательностей контрольных импульсов.
Инвертирование значений контрольных импульсов последовательности инвертором 6 является необходимой операцией для проверки правильного функционирования блоков накопления контрольных сигналов 4 и преобразователей выходных сигналов 5 блоков накопления в последовательность импульсов.
При проведении тестового контроля работы устройства управления последовательность действий аналогична представленной выше, но входные сигналы поступают не от внешних контрольных устройств, а выдаются специальным генератором тестовых последовательностей, входящим в состав блока управления 9. Этот блок вырабатывает тестовые последовательности, соответствующие всем возможным режимам работы управляющего устройства и всем возможным комбинациям его входных сигналов в каждом из режимов. Поэтому последовательность действий при тестовом контроле работы устройства управления будет следующей:
1 - сигналом от блока управления 9 логические блоки 3 всех функциональных модулей 1.1, …, 1.n и 2.1, …, 2.n первого и второго каналов управляющего устройства переводится в состояние тестирования, при котором в специальной памяти логических блоков 3 сохраняется их текущее состояние, а элементы самих логических блоков 3 переводятся в исходное (нулевое) состояние;
2 - генерация первого набора входных тестовых сигналов генератором тестовых последовательностей 9, их фиксация входным блоком 10 и передача их в функциональные модули 1.1 и 2.1 соответственно первого и второго каналов управляющего устройства;
3 - обработка входных сигналов логическим блоком 3;
4 - прием, фиксация и суммирование в блоке накопления 4 сигналов контроля работы логического блока 3.
По пунктам 2…4 последовательности действий выполняются для каждого (второго, третьего и т.д.) набора входных тестовых сигналов, вырабатываемых генератором тестовых последовательностей 9; количество этих наборов определяется числом режимов работы устройства и числом возможных комбинаций входных сигналов. Далее производятся следующие действия:
5 - преобразование выходных сигналов блока накопления 4 в последовательность контрольных импульсов блоком 5.
Пункты 1…5 последовательности действий выполняются для устройства управления каждым объектом (или для каждого функционального модуля);
6 - выработка общей замкнутой через инвертор 6 последовательности контрольных импульсов для всех объектов управления (или для всех функциональных модулей);
7 - сравнение в блоке 8 последовательностей контрольных импульсов двух комплектов 1 и 2 между собой по значениям и длительности;
8 - при совпадении по длительности и по значению сравниваемых последовательностей контрольных импульсов выдача блоком 8 сигнала разрешения управления объектом на выходные ключи 7 и или запрещение этой выдачи при несовпадении сравниваемых последовательностей сигналов;
9 - сигналом от блока управления 9 логические блоки 3 всех функциональных модулей 1.1, …, 1.n и 2.1, …, 2.n первого и второго каналов управляющего устройства переводится из состояния тестирования в рабочее состояние, путем переноса в них их текущего состояния из специальной памяти логических блоков 3.
Таким образом, после окончания операции тестирования логических блоков при условии положительного результата этого тестирования восстанавливается нормальная работа устройства, и выдаются сигналы разрешения управления. При отрицательном результате тестирования работа устройства прекращается, и выдаются сигналы запрещения управления. Кроме этого, предусматривается выдача сигнала об отказе устройства, который может быть использован для его автоматического перезапуска или включения резервного устройства.
Длительность проведения тестирования и схема включения исполнительных устройств, подключенных к блоку выходных ключей, выбирается таким образом, чтобы последовательность действий тестового контроля не влияла на работу исполнительных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2014 |
|
RU2599074C2 |
| Устройство для управления проходным светофором на перегоне железной дороги | 2016 |
|
RU2625217C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2286279C2 |
| СПОСОБ СРАВНЕНИЯ КОНТРОЛЬНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2642347C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2009 |
|
RU2393971C9 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ, ВХОДЯЩЕЙ В ЗАВИСИМОСТЬ СВЕТОФОРА | 2009 |
|
RU2406635C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2004 |
|
RU2263599C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ | 2004 |
|
RU2263598C1 |
| Способ контроля проследования поездов по перегону | 2021 |
|
RU2775025C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики. В способе в процессе нормальной работы устройства проводится сбор и накопление контрольных сигналов в каждом из двух устройств управления, работающих синхронно, затем эти сигналы сравниваются между собой и при их совпадении разрешается выдача управления на объект. Дополнительно введены два режима контроля - при нормальной работе устройства и при его тестировании. Кроме проверки работы устройств при выполнении их основной функции, производится периодическая тестовая проверка работы устройства во всех режимах. После окончания тестирования логических блоков при условии его положительного результата восстанавливается нормальная работа устройства и выдаются сигналы разрешения управления. При отрицательном результате тестирования работа устройства прекращается, и выдаются сигналы запрещения управления. Длительность проведения тестирования и схема включения исполнительных устройств выбирается таким образом, чтобы последовательность действий тестового контроля не влияла на работу исполнительных устройств. Достигается повышение безопасности функционирования устройства. 1 ил.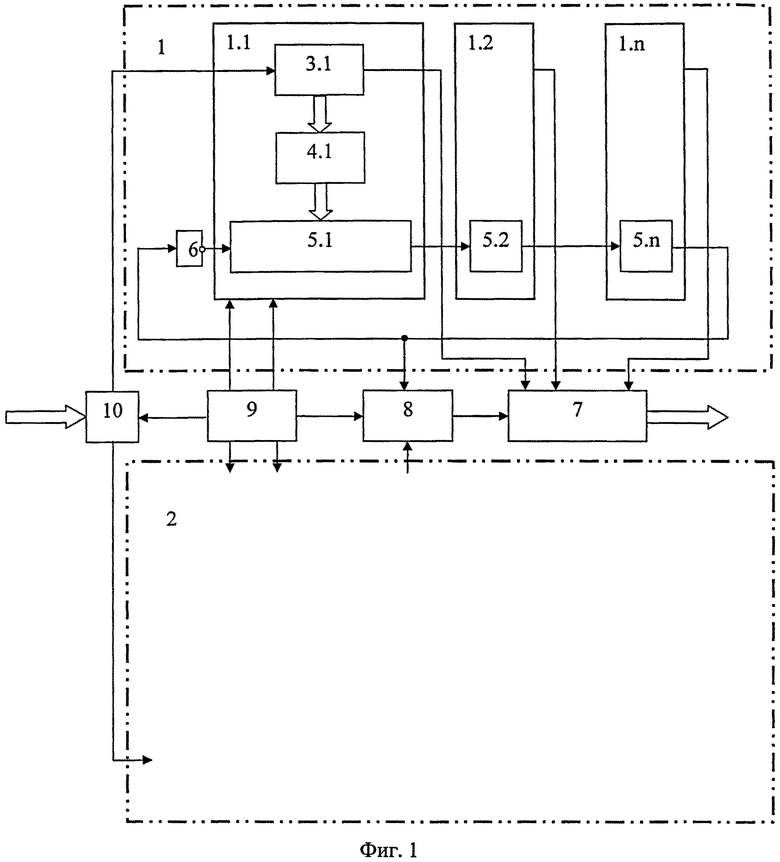
Способ контроля работы устройства управления ответственными объектами, заключающийся в том, что в процессе нормальной работы устройства проводится сбор и накопление контрольных сигналов в каждом из двух устройств управления, работающих синхронно, затем эти сигналы сравниваются между собой и при их совпадении разрешается выдача управления на объект, отличающийся тем, что с целью повышения безопасности функционирования устройства, упрощения структуры его построения и расширения области применения в него введены два режима контроля - при нормальной работе устройства и при его тестировании, причем при нормальной работе добавлены процедуры преобразования выходных сигналов блока накопления в общую замкнутую через инвертор последовательность контрольных импульсов каждого из двух устройств управления, которые сравниваются между собой и при их совпадении разрешается выдача управления на объект, а при тестировании устройства управления логический блок переводится в состояние тестирования, при котором в памяти этого блока сохраняется его текущее состояние, а элементы самого логического блока переводятся в исходное состояние; на вход логического блока последовательно поступают наборы тестовых сигналов от генератора тестовых последовательностей, которые обрабатываются логическим блоком, а сигналы контроля его работы суммируются в блоке накопления для каждого набора входных тестовых сигналов, количество которых определяется числом режимов работы устройства и числом возможных входных сигналов, затем осуществляется преобразование выходных сигналов блока накопления в последовательность импульсов для устройства управления каждым объектом и вырабатывается общая замкнутая через инвертор последовательность импульсов для всех объектов управления обоих управляющих каналов, которые сравниваются между собой по значениям и длительности, и при их совпадении выдается разрешение управления объектом или его запрещение при несовпадении сравниваемых последовательностей сигналов, после этого устройство переводится из состояния тестирования в рабочее состояние путем переноса текущего состояния из памяти в логические блоки.
| ДВУХКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2286279C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ, ВХОДЯЩЕЙ В ЗАВИСИМОСТЬ СВЕТОФОРА | 2009 |
|
RU2406635C1 |
| RU 2000130034 A, 27.10.2002 | |||
| Устройство для программного управления | 1987 |
|
SU1432461A1 |

