Изобретение относится к электроэнергетике, а именно к технике безопасности при работах в электроустановках напряжением выше 1 кВ.
Известен способ ремонта линейных разъединителей линии электропередачи с глухими отпайками [патент RU 2041540]. Способ относится к эксплуатационному обслуживанию оборудования подстанций напряжением 35-100 кВ, где работа ремонтного персонала возможна с применением индивидуального экранирующего комплекта, устройства для ремонта разъединителей под напряжением, изолирующей стремянки. Однако все описанные выше средства электробезопасности используются непосредственно во время работы под напряжением, в то время как предлагаемый способ предполагает, что нет необходимости в приближении к токоведущей части, находящейся под напряжением, во время производства работ.
Существует изобретение [патент RU 2006951], направленное на предупреждение человека об опасном приближении к токоведущим частям электрических установок, находящихся под напряжением переменного тока, осуществляемое при помощи емкостного датчика напряженности электрического поля, выполненного в виде единого электрода, в качестве которого использована одежда рабочего, изготовленная из электропроводящего материала, и накладных изолированных электродов, расположенных на манжетах, плечах и в области нагрудных карманов. Изобретение представляет собой индивидуальное средство обеспечения электробезопасности работника. Однако множество индивидуальных средств защиты от поражения электрическим током в электроустановках напряжением выше 1 кВ можно заменить общим средством электробезопасности, например ограждением, расположение которого относительно токоведущей части контролируется.
Из содержания “Межотраслевых правил по охране труда (правила безопасности) при эксплуатации электроустановок” ПОТ Р М-016-2001, РД 153-34.0-03.150-00, известны способы организации рабочего места ремонтного персонала с применением ограждений (щиты, ширмы, экраны и т.п.), выполненных из изоляционных материалов. Ограждения устанавливаются на допустимых расстояниях до токоведущих частей, находящихся под напряжением (пп. 1.3.3). Проблема таких способов организации рабочих мест заключается в субъективной оценке определяемых рабочими расстояний от токоведущих частей до ограждений, а также в невозможности объективного контроля допустимых расстояний до токоведущих частей во время производства работ.
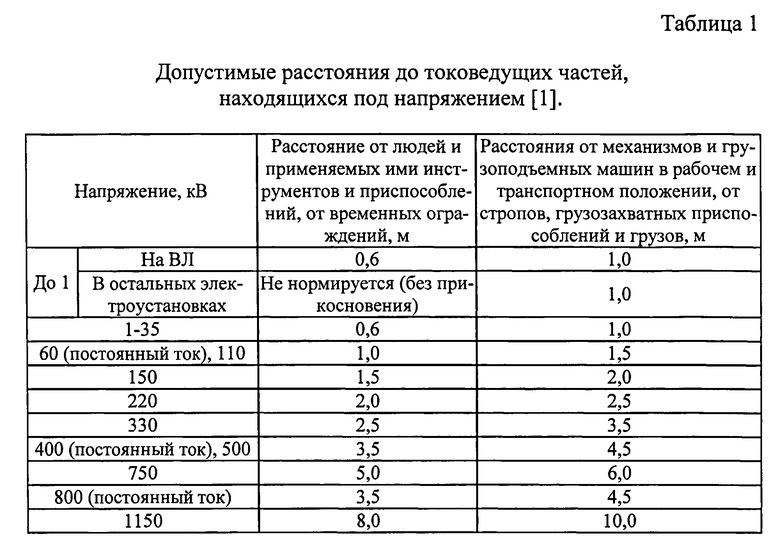
Цель изобретения - формирование способа организации рабочего места ремонтного персонала в электроустановках выше 1 кВ с применением ограждений, имеющих в своей конструкции устройства, оценивающие расстояние до токоведущих частей. При помощи определенного алгоритма сравниваются фактические расстояния и допустимое расстояние, указанное в ПОТ Р М-016-2001, РД 153-34.0-03.150-00 (пп. 1.3.3) [1], затем результаты сравнения фиксируются, о результатах сравнения извещаются работники при помощи звуковой или световой сигнализации. Нарушение (если оно есть) фиксируется на пульте у диспетчера, являющегося, например, работником оперативно-диспетчерской группы.
Технический результат заключается в обеспечении, при помощи ограждения, выполненного из изоляционного материала, в конструкции которого присутствует устройство, оценивающее расстояние от ограждения до токоведущей части, допустимого расстояния до токоведущей части, находящейся под напряжением выше 1 кВ (пп. 1.3.3) ПОТ Р М-016-2001, РД 153-34.0-03.150-00 [1], которое может быть нарушено во время производства работ. Обеспечение постоянного контроля за наличием допустимых расстояний между ограждениями и токоведущими частями, находящимися под напряжением выше 1 кВ, позволит повысить безопасность работ, выполняемых ремонтным персоналом.
Технический результат достигается тем, что способ организации и контроля за рабочим местом ремонтного персонала в электроустановках выше 1 кВ, заключающийся в том, что исходная информация о величинах расстояний от ограждений до токоведущих частей контролируется рабочими, отличается тем, что информация о величинах расстояний от ограждений до токоведущих частей через устройства, измеряющие расстояния, такие как дальномеры, получающие питание от электрической сети, поступают в процессор, где сравниваются эти измеренные действительные величины расстояний от ограждений до токоведущих частей с допустимыми величинами расстояний от ограждений до токоведущих частей, после этого в результате сравнения действительного и допустимого значений расстояний, формируются управляющие сигналы для средств сигнализации, установленных на ограждении и на пульте у диспетчера, в качестве устройств световой и звуковой сигнализации используются лампы, сирены, звонки, таким образом, при помощи изложенного алгоритма оценивается нарушение допустимого расстояния, затем фиксируется и извещаются работники при помощи звуковой или световой сигнализации, нарушение также фиксируется на пульте у диспетчера, являющегося работником оперативно-диспетчерской группы.
Дальномеры и устройства световой и звуковой сигнализации получают питание только от батареи, находящейся в устройстве дальномера, которая накапливает электроэнергию во время подключения к электрической сети, перед подготовкой рабочего места.
Сущность изобретения поясняется схемами: на рис. 1 показан алгоритм измерения расстояния от зоны ограждений до зоны токоведущих частей, на рис. 2 показано устройство дальномера, на рис. 3 показан алгоритм работы процессора, на рис. 4 показан алгоритм работы процессора сигнализирующего устройства, на рис. 5 показан алгоритм определения допустимого расстояния между зоной ограждений и зоной токоведущих частей,
где сигнализирующее устройство работает отдельно от сети напряжением, например, 0,4 кВ.
На рисунках используются следующие обозначения:
1 - рабочее место;
2 - зона барьеров;
3 - зона ограждений;
4 - зона, где соблюдается допустимое расстояние от зоны ограждений 3 до токоведущих частей 7 (ТЧ);
5 - зона, где может присутствовать токоведущая часть 7 (ТЧ);
6 - устройство (У), где дальномер 30 находится в поддерживающей конструкции 19;
7 - токоведущая часть (ТЧ);
8 - источник питания (ИП) дальномера 30;
9 - аналого-цифровой преобразователь (АЦП);
10 - процессор (П);
11 - цифроаналоговый преобразователь (ЦАП);
12 - показывающий или самопишущий регистрирующий прибор (РО);
13 - сигнализирующий орган (CO1), воздействующий на ремонтный персонал сигналом, светом;
14 - сигнализирующее устройство (СУ);
15 - диспетчерский пульт (ДП);
16 - сигнализирующий орган (CO2), воздействующий на диспетчера сигналом, светом;
17 - фотоприемник дальномера 30;
18 - батарея дальномера 30;
19 - конструкция, выполненная из изоляционного материала;
20 - лазер дальномера 30;
21 - корпус дальномера 30 [патент RU 2340871];
22 - электронный блок;
23 - диэлектрик;
24 - кабельная линия;
25 - величина расстояния (N) от ограждения 29 (О), где установлен лазер 20 дальномера 30, до токоведущей части 7 (ТЧ);
26 - таблица (Т) допустимых расстояний от ограждений до токоведущих частей, находящихся под напряжением, определенных на основании "Межотраслевых правил по охране труда (правила безопасности) при эксплуатации электроустановок" ПОТ Р М-016-2001, РД 153-34.0-03.150-00;
27 - величина допустимого расстояния (Nз) от ограждения 29 (О) до токоведущей части 7 (ТЧ), определенная в соответствии с классом напряжения токоведущей части 7 (ТЧ) на основании ПОТ Р М-016-2001, РД 153-34.0-03.150-00;
28 - блок суммы 
29 - ограждение (О);
30 - дальномер;
31 - аналого-цифровой преобразователь (АЦП СУ) сигнализирующего устройства 14 (СУ);
32 - процессор (П СУ) сигнализирующего устройства 14 (СУ);
33 - цифроаналоговый преобразователь (ЦАП СУ) сигнализирующего устройства 14 (СУ);
34 - антенна (А СУ) сигнализирующего устройства 14 (СУ);
35 - антенна (А);
36 - блок обработки данных и их передачи (ОиП), полученных от дальномера 30;
37 - управляющий сигнал (S), подаваемый на сигнализирующий орган 13 (СO1).
Суть предлагаемой разработки заключается в реализации при помощи технических средств, таких как дальномер [патент RU 2340871], контроля за допустимыми расстояниями от ограждений до токоведущих частей, находящихся под напряжением, в соответствии с ПОТ Р М-016-2001, РД 153-34.0-03.150-00 [1]. Таким образом, осуществляется постоянный контроль за расположением ограждений во время производства работ. В случае нарушения допустимого расстояния (табл.1), подается звуковой сигнал от сирены и световой сигнал от лампы, установленных на каждом ограждении и извещающих ответственного руководителя работ, производителя работ и членов бригады о нарушении допустимого расстояния. Одновременно о нарушении допустимого расстояния между ограждением и токоведущей частью информируется дежурный персонал, который может при помощи средств связи, телемеханики способствовать организации дополнительных мер, повышающих степень безопасного производства работ при помощи отключений, за счет резерва или других мероприятий и обязан связаться с ответственным руководителем работ и производителем работ при помощи мобильной связи с целью оповещения о сложившейся ситуации и тем самым повлиять на качество безопасного производства работ обслуживающим персоналом.
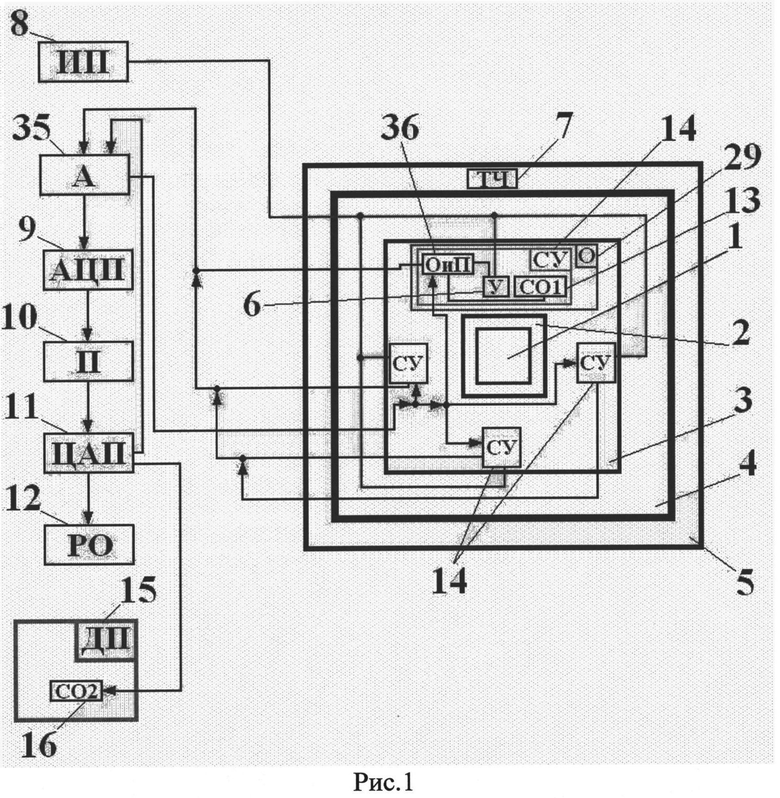
На рис.1 показан алгоритм измерения расстояния от зоны ограждений до зоны токоведущих частей. Здесь в качестве объекта, за которым осуществляется контроль, выступает ограждение 29 (О), входящее в зону ограждений 3, которая находится перед зоной барьеров 2, а зона барьеров 2 расположена перед рабочим местом 1. Ограждение 29 (О) установлено на допустимом расстоянии, обусловленном зоной 4, до токоведущей части 7 (ТЧ), входящей в зону 5 в соответствии с ПОТ Р М-016-2001, РД 153-34.0-03.150-00 [1]. Ограждение 29 (О) имеет в своем составе сигнализирующее устройство 14 (СУ), в которое входит: устройство 6 (У), имеющее дальномер (30) (рис.2); блок обработки данных и их передачи 36 (ОиП) и сигнализирующий орган 13 (СO1) (рис.1, рис.2), который воздействует на органы слуха и зрения рабочих соответственно звуковой и световой сигнализацией.
Дальномер 30 (рис.2) [патент RU 2340871, патент RU 2381447], имеющий корпус 21, передает в аналого-цифровой преобразователь 31 (АЦП СУ) при помощи электронного блока 22 сведение об измеренном расстоянии, обусловленном зоной 4 (рис.1), от ограждения 29 (О) до токоведущей части 7 (ТЧ). Дальномер 30 (рис.2) при помощи электронного блока 22 передает аналоговые сигналы в аналого-цифровой преобразователь 31 (АЦП СУ) для преобразования в дискретные, после чего величина, характеризующая расстояние в зоне 4 (рис.1), поступает в процессор 32 (П СУ) (рис.2). Дискретные сигналы из процессора 32 (П СУ) подаются в блок цифроаналогового преобразователя 33 (ЦАП СУ), такого как GSM модем Enfora 1218, СПТ 961, СПГ 763 и т.п.[2], где преобразуются в аналоговые. Затем результаты измерения реального, действительного расстояния от ограждения 29 (О) (рис.1) до токоведущей части 7 (ТЧ) передаются по каналу связи при помощи антенны 34 (А СУ) (рис.2), установленной на ограждении 29 (О) (рис.1), находящейся в блоке 36 (О и П) (рис.1, рис.2), в диспетчерский пункт на антенну 35 (А), откуда поступают в блок аналого-цифрового преобразователя 9 (АЦП), такого как GSM модем Enfora 1218, затем данные переходят в процессор 10 (П) и дальше в блок цифроаналогового преобразователя 11 (ЦАП), где преобразуются в аналоговые. Результаты измерения реального расстояния от ограждения 29 (О) (рис.1) до токоведущей части 7 (ТЧ) выводятся на показывающий или самопишущий регистрирующий прибор 12 (РО) (рис.1, рис.2). С другой стороны аналоговые сигналы с 11 (ЦАП) (рис.2) поступают на антенну 35 (А), откуда отправляются на антенну 34 (А СУ), далее сигнал преобразуется в блоке 31 (АЦП СУ) и передается в процессор 32 (П СУ), затем дискретные сигналы передаются в 33 (ЦАП СУ), откуда аналоговые управляющие сигналы поступают на сигнализирующий орган 13 (СО1), расположенный на ограждении 29 (О) (рис.1). Одновременно цифроаналоговый преобразователь 11 (ЦАП) (рис.2) позволяет сформированные в виде дискретных сигналов в процессоре 10 (П) команды сигнализирующему органу 16 (СO2), находящемуся на диспетчерском пульте 15 (ДП), преобразовать в аналоговые.
Дальномер 30 (рис.2) установлен для контроля за наличием допустимого расстояния зоны 4 (рис.1) от фиксированной точки на ограждении 29 (О), где располагается лазер 20 (рис.2) дальномера 30, до токоведущей части 7 (ТЧ) (рис.1).
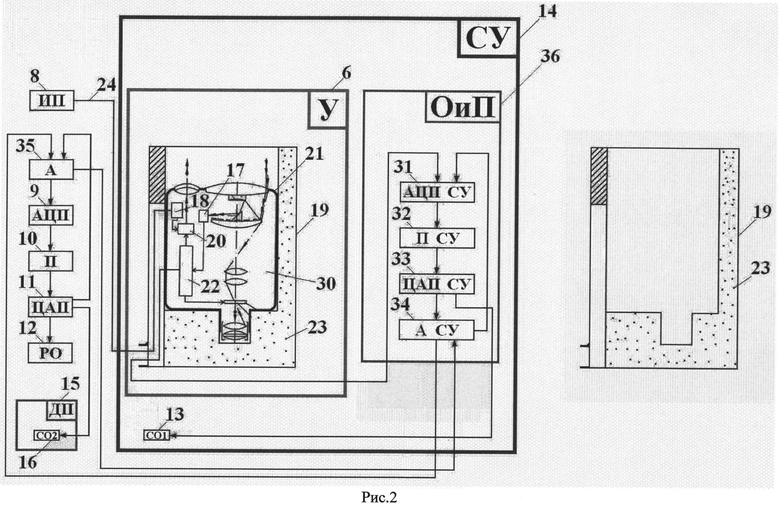
На рис.2 показано устройство дальномера 30 [патент RU 2340871], устанавливаемого на ограждении 29 (О) (рис.1). Дальномер 30 (рис.2) входит в состав сигнализирующего устройства 14 (СУ) (рис.1, рис.2). Лазер 20 на рис.2 предназначен для облучения токоведущей части 7 (ТЧ) (рис.1), от которой отражается луч и попадает на фотоприемник 17 (рис.2), а затем учитывается электронным блоком 22, передающим аналоговые сигналы в аналого-цифровой преобразователь 31 (АЦП СУ) (рис.2), который позволяет сформированные в электронном блоке 22 аналоговые сигналы преобразовать в дискретные, после чего они поступают в процессор 32 (П СУ).
Дальномер 30 (рис.2) получает электроэнергию от источника питания 8 (ИП) (рис.1, рис.2), такого как электрическая сеть низкого напряжения 0,4 кВ, и накапливает ее в батарее 18 (рис.2). Передача электроэнергии от источника питания 8 (ИП) (рис.1, рис.2) до батареи 18 (рис.2) дальномера 30 осуществляется при помощи кабельной линии 24. Батарея 18 дальномера 30 является источником питания электроэнергии для лазера 20.
На рис.2 показано, что дальномер 30 расположен в фиксированном положении, которое позволяет реализовать конструкция 19, выполненная из диэлектрического материала, такого как пластик. Часть конструкции 19 может быть заполнена диэлектриком 23 или может быть полой.
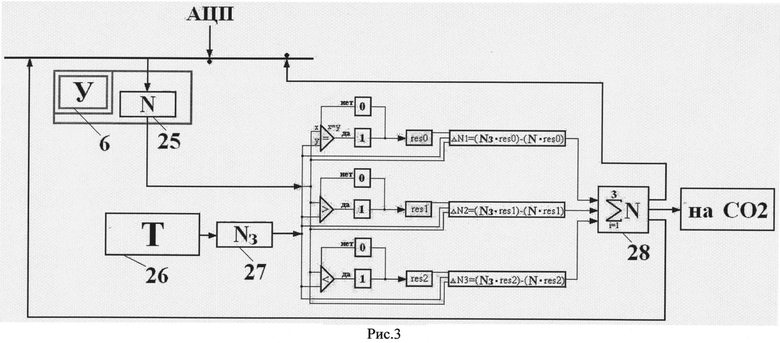
Алгоритм работы процессора 10 (П) (рис.1, рис.2) на примере работы одного дальномера 30 (рис.2) представлен на рис.3: из 9 (АЦП) (рис.1, рис.2) в процессор 10 (П) поступают сигналы, иллюстрирующие величины, измеренные дальномером 30 (рис.2), действительного расстояния 25 (N) (рис.3), от фиксированной точки на ограждении 29 (О) (рис.1), где расположен лазер 20 (рис.2) дальномера 30, до токоведущей части 7 (ТЧ) (рис.1). Из блока 26 (Т) (рис.3) поступает информация о величине допустимого расстояния 27 (Nз) от ограждения 29 (О) (рис.1) до токоведущей части 7 (ТЧ), определенная в соответствии с классом напряжения токоведущей части 7 (ТЧ), на основании ПОТ Р М-016-2001, РД 153-34.0-03.150-00.
Далее величины действительного 25 (N) (рис.3) и допустимого 27 (Nз) расстояний сравниваются между собой. Результат сравнения поступает в блок суммы 28 
Действительное расстояние 25 (N) (рис.3) должно стремиться к величине допустимого расстояния 27 (Nз). Когда осуществляется равенство между допустимым расстоянием 27 (Nз) и действительным расстоянием 25 (N) тогда, сигнализирующие органы 13 (СО1) и 16 (СО2) (рис.1, рис.2) не работают. Если нарушено равенство между допустимым расстоянием 27 (Nз) (рис.3) и действительным расстоянием 25 (N), сигнализирующие органы 13 (СO1) и 16 (СO2) (рис.1, рис.2) будут работать с целью оповещения рабочих о нарушении допустимого расстояния 27 (Nз).
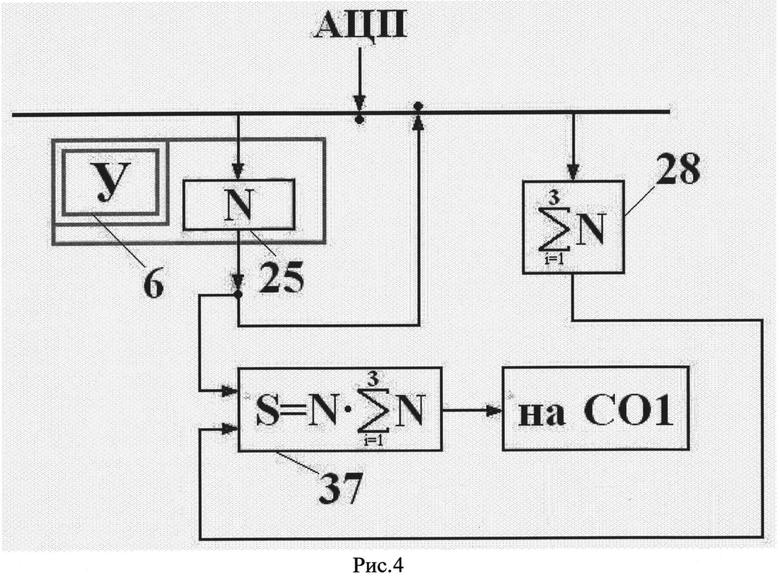
На рис.4 показан алгоритм работы процессора 32 (П СУ) (рис.2): из 31 (АЦП СУ) в процессор 32 (П СУ) поступают сигналы, иллюстрирующие величины, измеренные дальномером 30, действительного расстояния 25 (N) (рис.4), одновременно в результате работы процессора 10 (П) (рис.2, рис.3) в процессор 32 (П СУ) приходит значение блока суммы 28 



Таким образом, с учетом изложенного ранее алгоритма достигается постоянный контроль за соблюдением допустимого расстояния, между ограждением 29 (О) (рис.1) и токоведущей частью 7 (ТЧ), находящейся под напряжением, в соответствии с ПОТ РМ-016-2001, РД 153-34.0-03.150-00 [1].
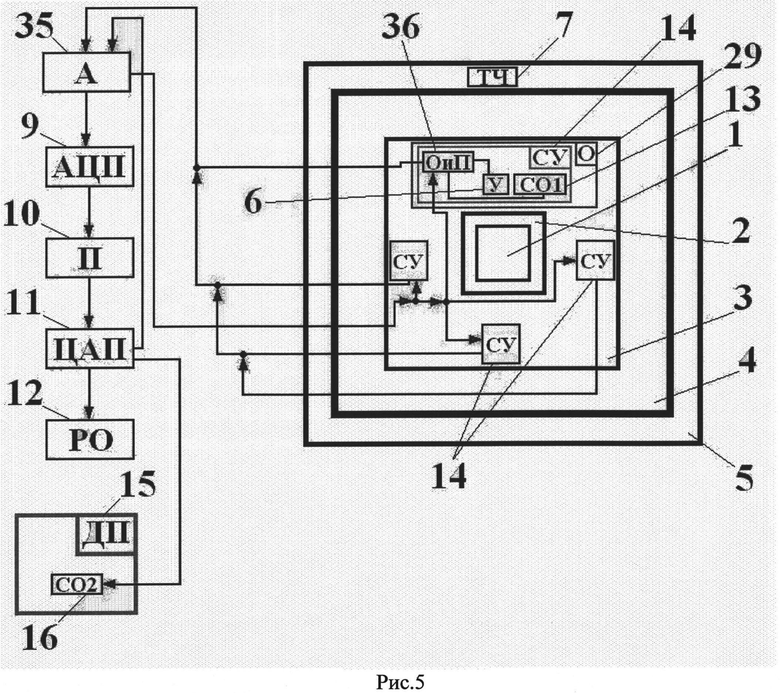
На рис.5 показан алгоритм определения допустимого расстояния зоны 4, располагающейся между зоной ограждений 3 и зоной токоведущих частей 5, без источника питания 8 (ИП), использованного на рис.1. На рис.5 показана схема работы сигнализирующих устройств 13 (СУ) (рис.1, рис.2), имеющих в своем составе дальномеры 30 (рис.2), блок обработки данных и их передачи 36 (О и П) и устройства световой и звуковой сигнализации, относящиеся к сигнализирующему органу 13 (СO1). Перечисленные блоки работают при помощи запасенной электрической энергии батареей 18.
Источники информации
1. Межотраслевые правила по охране труда (правила безопасности) при эксплуатации электроустановок ПОТ РМ-016-2001, РД 153-34.0-03.150-00 (утв. постановлением Минтруда РФ от 5 января 2001 г. № 3 и приказом Минэнерго РФ от 27 декабря 2000 г. № 163) (с изменениями и дополнениями).
2. Применение GSM-модемов совместно с приборами энергоучета НПФ ЛОГИКА/ ЗАО НПФ ЛОГИКА. - М.: ЛОГИКА, 2010. - 10 с.
Изобретение относится к электроэнергетике, а именно к технике безопасности при работах в электроустановках выше 1 кВ. Технический результат заключается в повышении безопасности работ, выполняемых ремонтным персоналом, и в обеспечении постоянного контроля за расстояниями от ограждений до токоведущих частей. Способ организации и контроля за рабочим местом ремонтного персонала в электроустановках выше 1 кВ заключается в том, что исходная информация о величинах расстояний от ограждений до токоведущих частей контролируется рабочими. Информация о величинах расстояний от ограждений до токоведущих частей через устройства, измеряющие расстояния, такие как дальномеры, получающие питание от электрической сети, поступает в процессор, где сравниваются эти измеренные действительные величины расстояний от ограждений до токоведущих частей с допустимыми величинами расстояний от ограждений до токоведущих частей. После этого в результате сравнения действительного и допустимого значений расстояний формируются управляющие сигналы для средств сигнализации, установленных на ограждении и на пульте у диспетчера. В качестве устройств световой и звуковой сигнализации используются лампы, сирены, звонки. Оценивается нарушение допустимого расстояния, затем фиксируется, извещаются работники при помощи звуковой или световой сигнализации. Нарушение также фиксируется на пульте у диспетчера, являющегося работником оперативно-диспетчерской группы. 1 з.п. ф-лы, 5 ил., 1 табл.
1. Способ организации и контроля за рабочим местом ремонтного персонала в электроустановках выше 1 кВ, заключающийся в том, что исходная информация о величинах расстояний от ограждений до токоведущих частей контролируется рабочими, отличающийся тем, что информация о величинах расстояний от ограждений до токоведущих частей через устройства, измеряющие расстояния, такие как дальномеры, получающие питание от электрической сети, поступает в процессор, где сравниваются эти измеренные действительные величины расстояний от ограждений до токоведущих частей с допустимыми величинами расстояний от ограждений до токоведущих частей, после этого в результате сравнения действительного и допустимого значений расстояний формируются управляющие сигналы для средств сигнализации, установленных на ограждении и на пульте у диспетчера, в качестве устройств световой и звуковой сигнализации используются лампы, сирены, звонки, таким образом, при помощи изложенного алгоритма оценивается нарушение допустимого расстояния, затем фиксируется и извещаются работники при помощи звуковой или световой сигнализации, нарушение также фиксируется на пульте у диспетчера, являющегося работником оперативно-диспетчерской группы.
2. Способ по п.1, отличающийся тем, что дальномеры и устройства световой и звуковой сигнализации получают питание только от батареи, находящейся в устройстве дальномера, которая накапливает электроэнергию во время подключения к электрической сети, перед подготовкой рабочего места.
| Межотраслевые правила по охране труда (правила безопасности) при эксплуатации элекроустановок | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Утв | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| развития РФ, 2001 | |||
| Устройство для защиты от попадания человека в опасную зону | 1989 |
|
SU1658273A1 |
| Устройство для сигнализации об опасном приближении к токоведущим частям высоковольтной электроустановки | 1989 |
|
SU1737603A1 |
| СИГНАЛИЗАТОР ОПАСНОГО ПРИБЛИЖЕНИЯ К ТОКОВЕДУЩИМ ЧАСТЯМ (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2006951C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

