Изобретение относится к железнодорожному транспорту, в частности, к способам оповещения о приближении железнодорожного подвижного состава при выполнении работ по строительству и ремонту железнодорожной инфраструктуры.
Известны способы оповещения о приближении железнодорожного подвижного состава к зоне выполнения ремонтной работы, в которых обнаруживается подвижный состав, приближающийся к зоне проведения ремонтной работы, и формируются сигналы предупреждения для ремонтных рабочих. Такие способы описаны, например, в следующих документах:
RU 2667682 (опуб. 24.09.2018); RU 2583011 (опуб. 27.04.2016); RU 2571844, (опуб. 20.12.2015); US 2020062286, МПК B61L 15/00, B61L 23/06, B61L 25/02, (опубликовано 27.02.2020).
Все эти системы требуют долгого периода развертывания как непосредственно в зоне выполнения ремонтной работы, так и на участках, приближенных к этой зоне. Кроме того, не предусматривается возможность взаимодействия устройств, входящих в различные системы оповещения о приближении железнодорожного подвижного состава к зоне выполнения ремонтной работы.
Такие же замечания можно отнести к способу оповещения работников на железнодорожных путях при производстве ремонтно-путевых работ, реализуемому с помощью системы по патенту RU 2701267 (опуб. 25.09.2009), которая содержит передающее устройство, которое представляет собой рацию, и пульт управления руководителя, который предназначен для приема сигнала от передающего устройства о приближении подвижного состава, контроля за исправностью системы и приема тревожных сигналов о срочной необходимости приостановить работы. Также в состав известной системы входят оповещатели, представляющие собой браслеты, находящиеся у всех работников, задействованных в ремонтно-путевых работах, принимающие сигнал в виде в виде вибрации и светового оповещения. При этом браслеты дополнительно снабжены тревожной кнопкой обратной связи, предназначенной для подачи тревожных сигналов.
При производстве на железнодорожной инфраструктуре строительных и ремонтных работ используется ряд путевых машин, то есть специальных единиц подвижного состава. К таким путевым машинам относятся, в частности:
- выправочно-подбивочно-отделочная путевая техника;
- выправочно-подбивочно-рихтовочная путевая техника, в том числе для стрелочных переводов;
- щебнеочистительная путевая техника, в том числе для стрелочных переводов;
- краны укладочные;
- машины для стабилизации балласта;
- платформы моторные.
Однако в известном способе RU 2701267 путевые машины не используются для оповещения работников при производстве ремонтно-путевых работ.
Наиболее близким к предложенному способу является способ оповещения работающих на железнодорожных путях с использованием коллективного переносного сигнализатора (КПС) (RU 2655566 C1, опуб. 28.05.2018), заключающийся в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств ограждения, а на месте работ - коллективный переносный сигнализатор (КПС), обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и сигнальными радиоуправляемыми устройствами ограждения, КПС в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их КПС, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством КПС в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу сигнальным радиоуправляемым устройствам ограждения для формирования запрещающего показания или разрешающего показания, при этом сигнальные радиоуправляемые устройства ограждения выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на КПС, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого сигнального радиоуправляемого устройства ограждения, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги. КПС предназначен для работы в составе системы оповещения о приближении подвижного состава, включающей, в том числе, датчики определения приближения подвижного состава, радиоуправляемые переносные сигнальные устройства ограждения и коллективные переносные оповещатели. Для трансляции оповещения на большую площадь или при зашумленных условиях требуется передача сигнала оповещения от КПС на коллективный переносной оповещатель (КПОМ), установленный на путевой машине, который транслирует оповещение через внешние мощные громкоговорители.
Техническая проблема, решаемая изобретением, заключается в создании способа оповещения о приближении подвижного состава с помощью системы, которая размещается на путевой машине и может работать как в автономном режиме, выполняя функцию самостоятельной системы оповещения и не требуя внешних дополнительных коллективных оповещателей, так и в групповом режиме в составе системы оповещения о приближении подвижного состава, выполняя функцию только коллективного переносного оповещателя, при этом обеспечивается сокращение периода развертывания системы оповещения работников при производстве ремонтно-путевых работ за счет расположения (в месте хранения/транспортировки) узлов и блоков этой системы на путевых машинах.
Для решения указанной технической проблемы предложен способ оповещения работающих на железнодорожных путях о приближении подвижного состава, заключающийся в том, что на месте работ располагают систему оповещения, включающую управляющий контроллер, приемопередатчик, радиостанцию, по меньшей мере один громкоговоритель и оптический излучатель, система с помощью приемопередатчика принимает от датчиков обнаружения подвижного состава контрольные сигналы и при обнаружении подвижного состава - сигналы оповещения и воспроизводит принятые сигналы в виде соответствующих звуковых и оптических контрольных сигналов, по которому систему оповещения (СОМП) располагают на путевой машине, при этом СОМП дополнительно включает переключатель режимов, с помощью которого при нахождении СОМП в составе другой системы оповещения о приближении подвижного состава переводят СОМП в режим работы коллективного переносного оповещателя, при этом СОМП принимает контрольные сигналы и сигналы оповещения от коллективного переносного сигнализатора, входящего в состав другой системы, и воспроизводит принятые сигналы в виде соответствующих звуковых и оптических контрольных сигналов и сигналов оповещения.
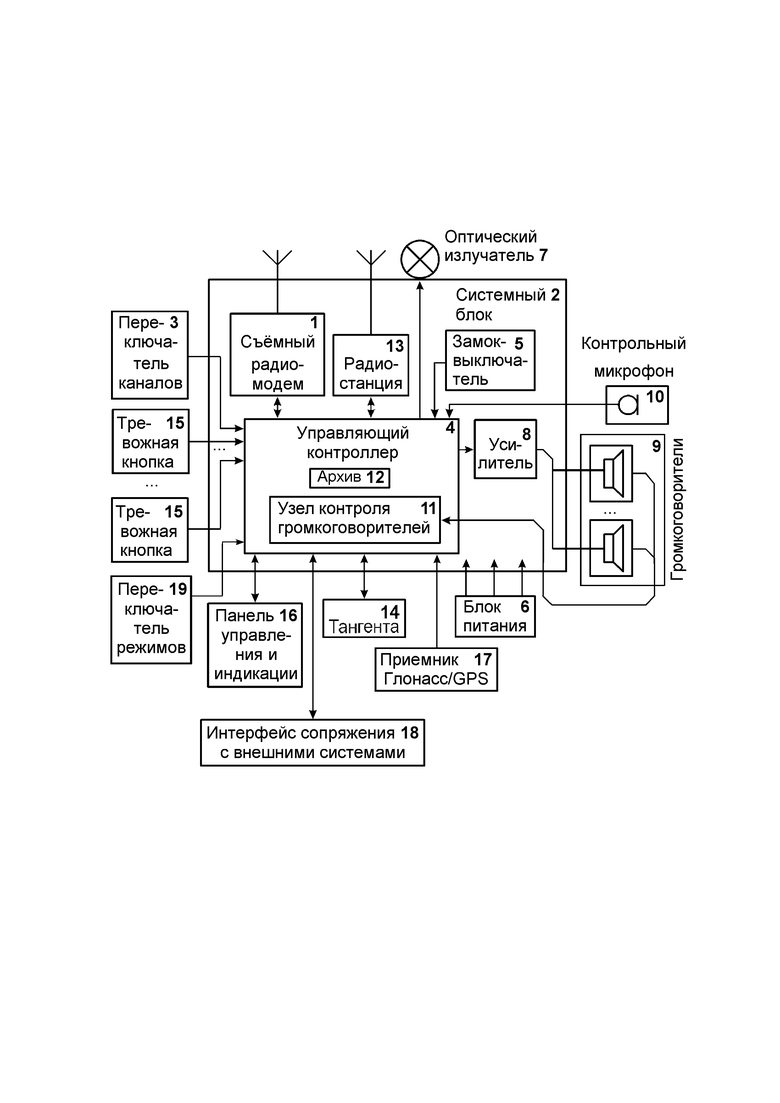
На чертеже приведена блок-схема системы оповещения о приближении железнодорожного подвижного состава и ограждения участка работ СОМП, реализующей предложенный способ.
На чертеже использованы следующие цифровые обозначения: 1 - приемопередатчик - съёмный радиомодем, 2 - системный блок, 3 - переключатель каналов, 4 - управляющий контроллер, 5 - замок-выключатель, 6 - блок питания, 7 - оптический излучатель, 8 - усилитель, 9 - громкоговорители, 10 - контрольный микрофон, 11 - узел контроля громкоговорителей, 12 - архив, 13 - радиостанция, 14 - тангента, 15 - тревожная кнопка, 16 - панель управления и индикации, 17 - приемник ГЛОНАСС/GPS, 18 - интерфейс сопряжения с внешними системами, 19 - переключатель режимов.
В состав системы оповещения входят блок 6 питания, системный блок 2, переключатель 3 каналов, тревожные кнопки 15, панель 16 управления и индикации, интерфейс 18 сопряжения с внешними системами, тангента 14, приемник 17 ГЛОНАСС/GPS, громкоговорители 9, контрольный микрофон 10 и оптический излучатель 7. Блок 6 питания выполнен с возможностью формирования напряжений питания для всех блоков и узлов, входящих в состав системы оповещения.
В состав системного блока 2 входят приемопередатчик, предпочтительно представляющий собой съёмный радиомодем 1, радиостанция 13, замок-выключатель 5, усилитель 8 и управляющий контроллер 4, в состав которого входят архив 12 и узел 11 контроля громкоговорителей. При этом входы и выходы съемного радиомодема 1 и радиостанции 13 подключены к соответствующим выходам и входам управляющего контроллера 4. Выход замка-выключателя 5 соединен с одним из входов управляющего контроллера 4. Выход управляющего контроллера 4 соединен со входом усилителя 8.
Тангента 14 (от французкого "tangent" - касательный) представляет собой переключатель, отключающий управляющий контроллер 4 от громкоговорителей 9 для возможности вести радиопереговоры через радиостанцию 13 или при связи между управляющим контроллером 4 и громкоговорителями 9 вести громкоговорящее голосовое оповещение. При этом входы громкоговорителей 9 подключены к выходу усилителя 8, а контрольные выходы громкоговорителей 9 соединены с узлом 11 контроля громкоговорителей, входящим в состав управляющего контроллера 4.
Вход и выход панели 16 управления и индикации подключены к соответствующему выходу и входу управляющего контроллера 4. Панель 16 управления и индикации содержит ЖК-дисплей.
Выходы переключателя 3 каналов, тревожных кнопок 15, интерфейса 18 сопряжения с внешними системами, приемника ГЛОНАСС/GPS и контрольного микрофона 10 соединены с соответствующими входами управляющего контроллера 4.
Вход оптического излучателя 7 соединен с выходом управляющего контроллера 4.
Переключатель 19 режимов работы системы соединен с соответствующим входом управляющего контроллера 4.
Для выполнения своих задач оповещения заявляемая система, установленная на путевой машине, сопрягается с другими системами оповещения или с отдельными устройствами, входящими в состав этих систем. Такое сопряжение обеспечивается с помощью съёмного радиомодема 1, который является частью системного блока 2. При этом системный блок 2 выполняет операции, реализующие требования по оповещению работающих в зоне строительства и ремонта железнодорожной инфраструктуры. Выполнение этих операций зависит от сигналов управления, формируемых блоками и узлами, не входящими в состав системного блока 2.
Для оперативного переключения рабочей частоты съёмного радиомодема 1 используется переключатель 3 каналов, не входящий в состав системного блока 2. Переключатель 3 каналов формирует сигналы на управляющий контроллер 4, с помощью которых управляющий контроллер 4 устанавливает одну из заранее запрограммированных частот съёмного радиомодема 1.
Включение и выключение заявляемой системы оповещения осуществляется с помощью замка-выключателя 5 доверенным лицом, имеющим право на это включение и выключение, например, таким доверенным лицом может быть руководитель, контролирующий функционирование системы оповещения.
Напряжения питания для блоков и узлов заявляемой системы оповещения формирует блок 6 питания.
Способ оповещения осуществляется следующим образом.
После включения системы оповещения (СОМП) на управляющий контроллер 4 через съемный радиомодем 1 поступают контрольные или аварийные радиосигналы от датчиков обнаружения подвижного состава и от радиоуправляемых переносных сигнальных устройств ограждения. Источники этих сигналов не относятся к рассматриваемой системе оповещения о приближении железнодорожного подвижного состава. Они могут быть как автономными, так и входить в состав других железнодорожных систем оповещения. Однако управляющий контроллер 4 опознает эти сигналы, поступающие на него через съёмный радиомодем 1, с учетом канальных сигналов, поступающих на управляющий контроллер 4 от переключателя 3 каналов.
СОМП устанавливается на постоянной основе на путевую машину и запитывается от бортовой сети. Датчики обнаружения, радиоуправляемые переносные сигнализаторы ограждения (РПСО) и ретрансляторы располагаются в специальных местах хранения/перевозки на путевой машине. При необходимости проведения работ с ограждением места работ ответственные работники, передвигаясь на путевой машине расставляют оборудование ограждения на определенном расстоянии от места работ. Датчики обнаружения на расстоянии 2-2,3 км, радиоуправляемые переносные сигнализаторы - 1-1,7 км.
Каждое РПСО воспроизводит разрешающее или запрещающее показания по управляющим командам, переданным вручную руководителем работ от СОМП. При обнаружении датчиками подвижного состава и наличии препятствий движения на месте проведения работ руководитель с помощью элементов управления на панели 16 управления и индикации задает соответствующий управляющий сигнал и передает его по радиоканалу на РПСО для формирования и включения запрещающего показания, требующего остановки поезда у границы места проведения работ. При отсутствии препятствий движения на месте проведения работ СОМП передает по радиоканалу управляющий сигнал РПСО для формирования и включения разрешающего показания, разрешающего движение поезда с установленной скоростью.
В положении переключателя 19 режимов «автономный» управляющий контроллер 4 периодически формирует пакет посылки мониторинга для передачи через съемный радиомодем 1 на внешние блоки, источники сигналов - датчики обнаружения подвижного состава, радиоуправляемые переносные сигнальные устройства ограждения, ретрансляторы, выносной пульт руководителя - которые, приняв посылку мониторинга формируют пакет посылки состояния и отправляют обратно в СОМП. Поступивший через съемный радиомодем 1 пакет посылки состояния анализируется в управляющем контроллере 4 и на панели 16 индикации выводятся буквенные обозначения о текущем состоянии указанных внешних блоков.
В положении переключателя 19 режимов «групповой» управляющий контроллер 4 перестает формировать посылки мониторинга и анализировать посылки состояния. В этом случае СОПМ выполняет функции коллективного переносного оповещателя аналогично КПОМ из прототипа, а именно, ожидает посылку мониторинга от коллективного переносного сигнализатора КПС другой, уже работающей на месте работ, системы оповещения и отвечает посылкой состояния, тем самым зарегистрировавшись в качестве коллективного переносного оповещателя КПОМ. При получении сигнала оповещения от КПС другой системы управляющий контроллер 4 через усилитель 8 транслирует сигнал оповещения через громкоговорители 9.
В зависимости от принятых управляющим контроллером 4 контрольных или аварийных сигналов, управляемый контроллер 4 включает на оптическом излучателе 7 световые контрольные или аварийные сигналы, а также сигналы оповещения о приближении подвижного состава. Кроме того, управляемый контроллер 4 через усилитель 8 передает сигнал управления на громкоговорители 9, которые формируют звуковые контрольные или аварийные сигналы.
Эти звуковые сигналы с помощью контрольного микрофона 10 преобразуются в электрическую форму и передаются в управляющий контроллер 4. Кроме того, в каждом из громкоговорителей 9 фиксируется потребляемая текущая мощность. Эти данные поступают в системный блок 2 - на входы узла 11 контроля громкоговорителей, который входит непосредственно в состав управляющего контроллера 4.
В управляющем контроллере 4 анализируется содержимое узла 11 контроля громкоговорителей, дополненное выходными сигналами контрольного микрофона 10. В результате такого анализа отыскиваются отказавшие громкоговорители 9 (в части короткого замыкания или обрыва), а также устанавливается наличие недопустимо громкого или слишком слабого звука.
Такие недостатки громкоговорителей 9 фиксируются в текущей работе оптического излучателя 10, например, в виде особого мигания, и отмечаются в архиве 12, входящем в состав управляющего контроллера 4. Руководитель, контролирующий функционирование системы оповещения, должен в этом случае принять решение о временном отключении того или иного громкоговорителя 9 для его дальнейшей замены или ремонта.
Используя управляющий контроллер 4, подключенная к нему радиостанция 13 позволяет обеспечивать радиосвязь руководителя, контролирующего функционирование системы оповещения, с другими участниками работ на железнодорожных путях, например, с бригадиром путевых рабочих, с другими руководителями, с диспетчерами, с машинистами транспортных средств.
Тангента 14 (приемно-вызывное устройство), снабженная специальными кнопками, обеспечивает тоновые вызовы радиосети. Через тангенту 14 осуществляется связь с громкоговорителями 9, что позволяет, при необходимости, озвучивать поступившие радиосообщения.
Руководитель, контролирующий функционирование системы оповещения, может через тангенту 14 и громкоговорители 9 проводить непосредственное громкое вещание, которое может понадобиться, например, для управления действиями бригад путевых рабочих.
В распоряжении Руководителя, контролирующего функционирование системы оповещения, находится одна или несколько тревожных кнопок 15, подключенных непосредственно к управляющему контроллеру 4. Они расположены с максимальным удобством для указанного выше руководителя, не только на системном блоке, но и, например, на корпусе машины для доступа с земли. При нажатии какой-либо из них включается тревожная сигнализация (или одна из возможных тревожных сигнализаций, если таких сигнализаций предусмотрено несколько видов). Подобная тревожная сигнализация может представлять собой имитацию тревожной ситуации для проверки правильности действия работников в состоянии тревоги. При включении тревожной сигнализации включаются звуковые сигналы громкоговорителей 9, сигналы оптического излучателя 6.
Необходимо отметить, что определенное количество тревожных кнопок 15 должны находиться в распоряжении других участников работ в зоне строительства и ремонта железнодорожной инфраструктуры (на чертеже такие тревожные кнопки не показаны). Нажатие какой-либо из них должно указывать на возникновение реальной тревожной или аварийной ситуации, на которую должен соответствующим образом реагировать Руководитель.
С помощью того же радиомодема 1 Руководитель, контролирующий функционирование системы оповещения, может проводить контроль работы внешних устройств системы оповещения. При этом с помощью органов управления (кнопок и тумблеров) панели 16 управления и индикации руководитель может выбрать внешнее устройство (например, семафор) и запустить его проверку. Данные этой проверки будут поступать через съёмный радиомодем 1 и управляющий контроллер 4 на панель 16 управления и индикации, наглядно отражаясь на ЖК-дисплее этой панели. Результат контроля выбранного внешнего устройства должен быть отмечен в архиве 12, так же как и другие события, происходящие во время работы системы оповещения. Такими событиями могут быть, например, прохождение подвижного состава через зону ремонтных работ или отказ какого-либо блока системы оповещения. При подключенном приемнике 17 ГЛОНАСС/GPS в архив 12 записываются координаты и точное время каждого события, отмечаемого в архиве 12.
Архив 12 может быть прочитан с помощью внешнего программного обеспечения при подключении интерфейса 18 сопряжения с внешними системами к управляющему контроллеру 4.
На путевой машине, в которую устанавливают СОМП на постоянной основе, есть системы, которые контролируют параметры машины (топливо, скорость и т.д.), например, Автоматизированная система контроля работы специального подвижного состава (АС КРПС). Через интерфейс 18 сопряжения с внешними системами можно передавать параметры работы СОМП (вкл/выкл, сирена, обнаружения поезда и т.д.).
Рассматриваемая система оповещения о приближении железнодорожного подвижного состава может быть включена как часть в состав автоматизированных систем контроля железнодорожной инфраструктуры. При таком включении интерфейс 18 сопряжения с внешними устройствами может быть использован для передачи информации о состоянии системы оповещения и о прошедших событиях, а также для получения системой оповещения управляющих команд. Такое введение системы оповещения в состав автоматизированных систем контроля железнодорожной инфраструктуры может проводиться по методике удаленной связи.
Рассмотрение работы заявляемой системы оповещения о приближении железнодорожного подвижного состава показывает, что ее функционирование может быть обеспечено при установке этой системы оповещения на путевой машине. Таким образом повышается мобильность при расстановке блоков системы оповещения. Уменьшаются трудовые и временные затраты. Увеличивается вариантность использования СОМП как в качестве основного блока оповещения в автономном режиме, так и вспомогательного в составе другой системы оповещения в качестве коллективного оповещателя в групповом режиме. Движение путевой машины не препятствует функционированию системы оповещения. То есть, для данной системы не требуется какого-либо периода развертывания как непосредственно в зоне выполнения ремонтной работы, так и на участках, приближенных к этой зоне. Заявляемая система оповещения готова к работе в любой момент времени после включения замка-выключателя 5.
Изобретение относится к средствам оповещения о приближении железнодорожного подвижного состава при выполнении работ по строительству и ремонту железнодорожной инфраструктуры. В способе на путевой машине на месте работ располагают систему оповещения (СОМП), включающую управляющий контроллер, приемопередатчик, радиостанцию, по меньшей мере один громкоговоритель и оптический излучатель. СОМП с помощью приемопередатчика принимает от датчиков обнаружения подвижного состава контрольные сигналы и при обнаружении подвижного состава - сигналы оповещения и воспроизводит принятые сигналы в виде звуковых и оптических контрольных сигналов. СОМП дополнительно включает переключатель режимов, с помощью которого при нахождении СОМП в составе другой системы оповещения о приближении подвижного состава переводят СОМП в режим работы коллективного переносного оповещателя, при этом СОМП принимает контрольные сигналы и сигналы оповещения от коллективного переносного сигнализатора, входящего в состав другой системы, и воспроизводит принятые сигналы в виде соответствующих звуковых и оптических контрольных сигналов и сигналов оповещения. Достигается возможность сокращения времени развертывания системы оповещения при производстве ремонтно-путевых работ. 1 ил.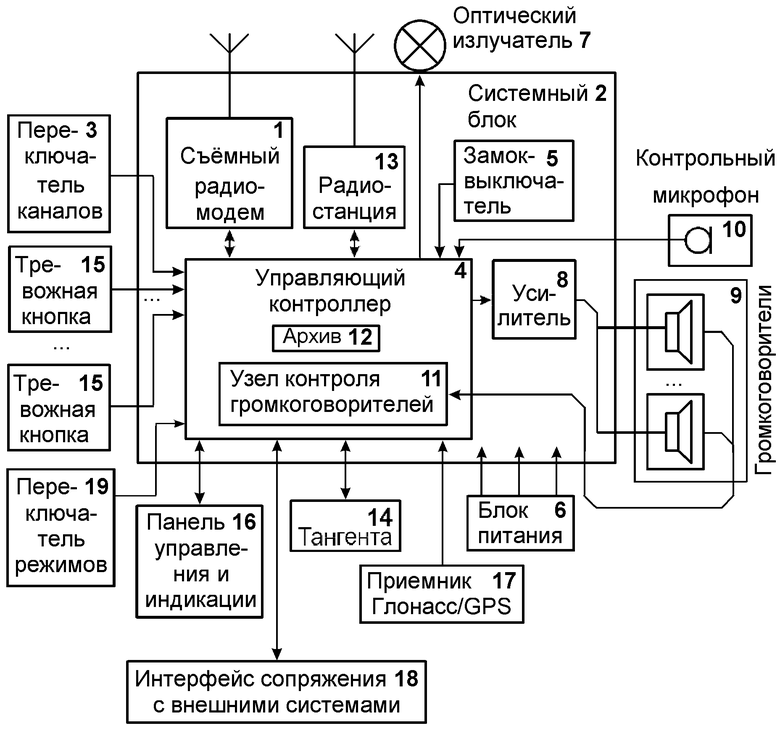
Способ оповещения работающих на железнодорожных путях о приближении подвижного состава, заключающийся в том, что на месте работ располагают систему оповещения, включающую управляющий контроллер, приемопередатчик, радиостанцию, по меньшей мере один громкоговоритель и оптический излучатель, система с помощью приемопередатчика принимает от датчиков обнаружения подвижного состава контрольные сигналы и при обнаружении подвижного состава – сигналы оповещения и воспроизводит принятые сигналы в виде соответствующих звуковых и оптических контрольных сигналов, отличающийся тем, что систему оповещения (СОМП) располагают на путевой машине, при этом СОМП дополнительно включает переключатель режимов, с помощью которого при нахождении СОМП в составе другой системы оповещения о приближении подвижного состава переводят СОМП в режим работы коллективного переносного оповещателя, при этом СОМП принимает контрольные сигналы и сигналы оповещения от коллективного переносного сигнализатора, входящего в состав другой системы, и воспроизводит принятые сигналы в виде соответствующих звуковых и оптических контрольных сигналов и сигналов оповещения.
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Автоматический сцепной железнодорожный прибор | 1931 |
|
SU28513A1 |
| СПОСОБ ПОЛУЧЕНИЯ НИТРОБЕНЗОЙНЫХ КИСЛОТ | 0 |
|
SU178816A1 |
| А | |||
| В | |||
| Бабина и др | |||
| статья "АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОГРАЖДЕНИЯ МЕСТА РАБОТ" Сборник статей Международной научно - практической конференции, "АЭТЕРНА" Челябинск, 2018 г | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОГРАЖДЕНИЯ МЕСТА РАБОТ И ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | |||

