Область техники
Настоящее изобретение относится к сельскому хозяйству, а более точно к системам кормления животных.
Предшествующий уровень техники
Из уровня техники известна раскрытая в авторском свидетельстве SU 1327858, опубликованном 07.08.1987, система приготовления кормов для животных, включающая платформу для хранения кормов, смеситель кормов, средство перемещения кормов в смеситель кормов и конвейер, вытянутый поперек платформы для хранения кормов.
Недостатком известной системы является низкая производительность, необходимость периодически останавливать приготовление кормов для загрузки кормов на платформу для их хранения.
Из уровня техники известна также раскрытая в международной заявке WO 2013/157928 от 24.10.2013 система приготовления кормов для животных, включающая платформу для хранения кормов, смеситель кормов и установленное на траверсе (горизонтальной балке) средство перемещения кормов в смеситель кормов.
Эта известная система является ближайшим аналогом заявленной системы приготовления кормов для животных.
Недостатком это известной системы является низкая производительность кормов из-за поочередной подачи кормов в смеситель средством перемещения кормов, установленным на одной и той же траверсе.
Раскрытие изобретения
Технические результаты, достигаемые в заявленном изобретении, заключаются в увеличении производительности приготовления кормов.
Указанный технический результат достигается в системе приготовления кормов для животных, включающей:
по меньшей мере две платформы для хранения кормов,
смеситель кормов,
конвейер, вытянутый поперек по меньшей мере одной из платформ для хранения кормов и установленный с возможностью перемещения кормов в смеситель кормов, и
установленные над каждой платформой для хранения кормов устройства перемещения кормов вдоль платформ и выгрузки на конвейер или смеситель кормов, включающие каждое траверсу со средством захвата кормов.
Установка устройства перемещения кормов над платформой позволяет беспрепятственно пополнять запас кормов на этой платформе, распределяя этот запас вдоль платформы этим же устройством перемещения кормов. Таким образом, каждая платформа, оборудованная устройством перемещения кормов вдоль платформы, обеспечивающим выгрузку кормов на конвейер или смеситель кормов, является модулем системы приготовления кормов. Набор модулей объединяется в систему приготовления кормов посредством конвейера и смесителя, расположенных соответствующим образом.
Производительность приготовления кормов возрастает, поскольку заявленная система приготовления кормов обеспечивает непрерывную загрузку кормов в смеситель кормов в отличие от аналогов.
Система может включать три или более модулей-платформ для хранения кормов. В этом случае смеситель кормов может быть расположен с возможностью выгрузки в него кормов с одной платформы для хранения кормов, а конвейер может быть расположен с возможностью выгрузки в него кормов с двух или более других платформ для хранения кормов.
Средство перемещения кормов может быть установлено на траверсе с возможностью перемещения вдоль нее.
Система может включать платформу для хранения сенажа с установленным над ней дополнительно с возможностью продольного перемещения устройством уплотнения и укрывания сенажа, включающим траверсу со средствами уплотнения и укрывания сенажа.
Смеситель кормов может быть выполнен с возможностью перемещения и выдачи кормов в кормушки животным.
Краткое описание чертежей
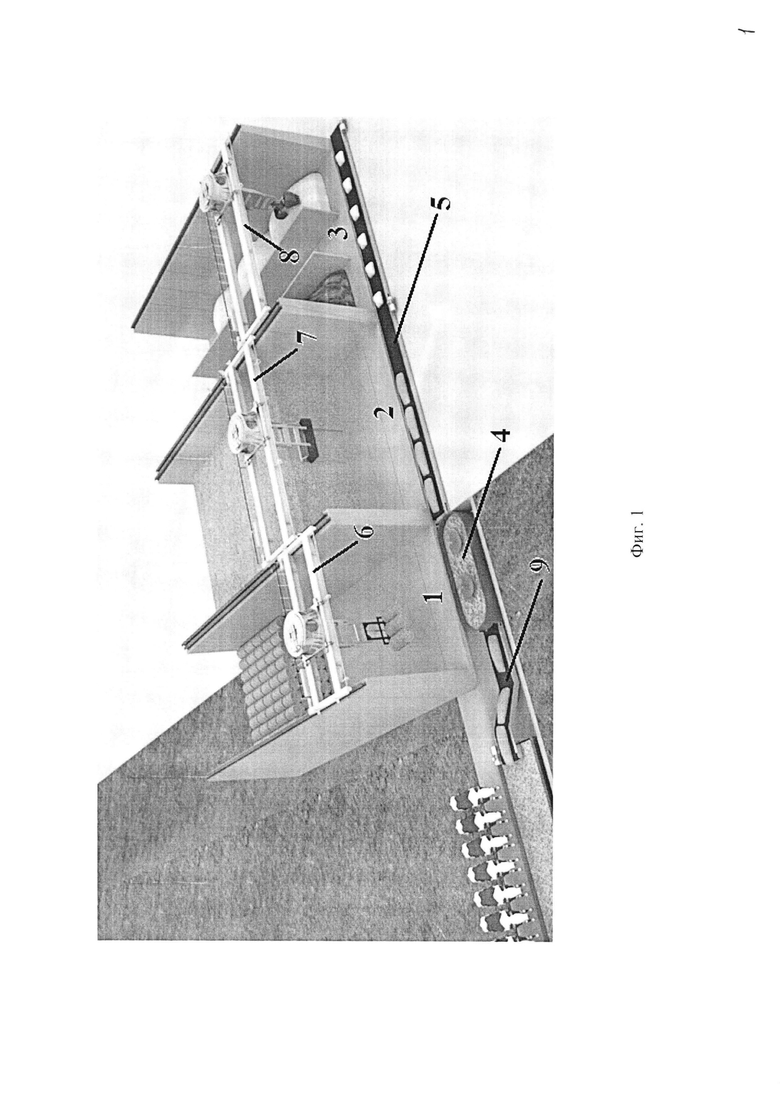
На фиг. 1 показана система приготовления кормов для животных, включающая три платформы для хранения кормов.
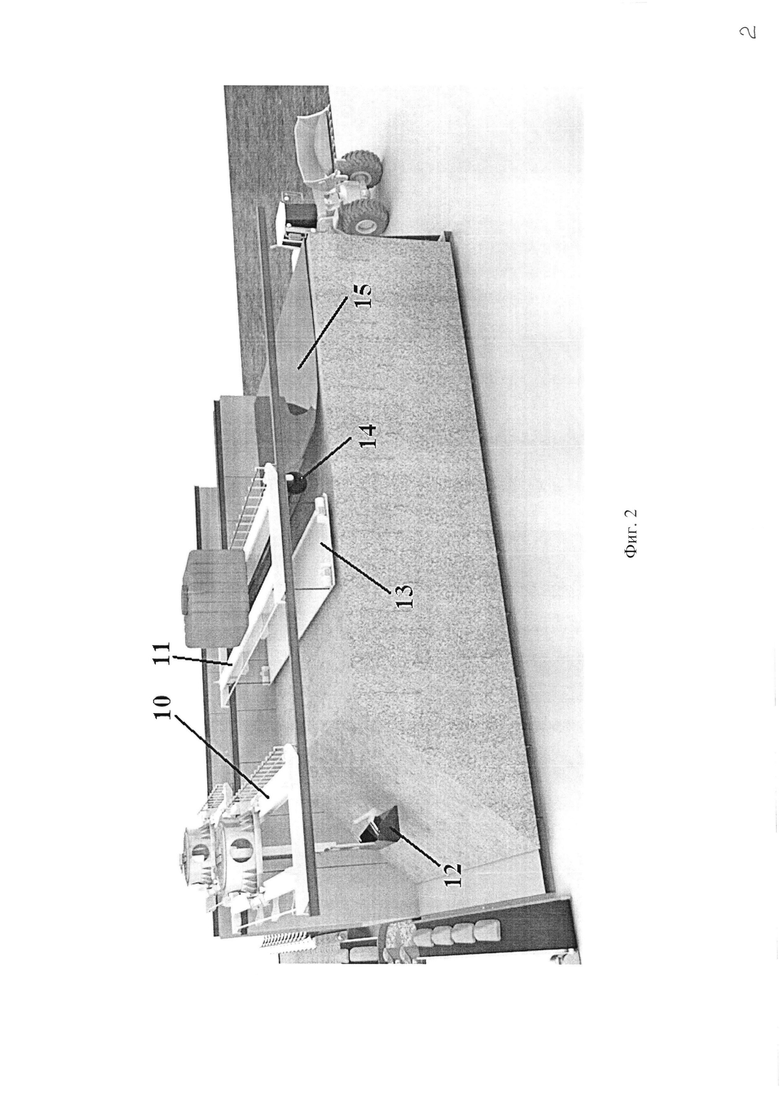
На фиг. 2 показана платформа для хранения сенажа.
Реализация изобретения
На фиг. 1 показана система приготовления кормов для животных, включающая три платформы для хранения кормов 1, 2 и 3, смеситель кормов 4, конвейер 5, вытянутый поперек платформ 1 и 2 и установленный с возможностью перемещения кормов в смеситель кормов 4. Платформы для хранения кормов 1, 2 и 3 разделены продольными стенками, на которых установлены направляющие для перемещения траверс. Траверсы 6, 7 и 8, каждая со средством захвата кормов, установлены на направляющих над каждой платформой для хранения кормов с возможностью перемещения вдоль платформ и выгрузки кормов на конвейер 5 или смеситель кормов 4. Средства захвата кормов установлены на траверсах 6, 7 и 8 с возможностью перемещения вдоль них.
Смеситель кормов 4, как показано на фиг. 1, порционно отгружает приготовленную кормосмесь на конвейер 9, перемещающий кормосмесь к кормушкам животных. В другом варианте реализации (не показан) смеситель кормов может быть сменяемым, установлен, например, на тележке, чтобы перевозить производимую им кормосмесь и выгружать непосредственно в кормушки.
Представленная на фиг. 2 платформа для хранения сенажа оснащена двумя траверсами 10 и 11. На траверсе 10 установлено средство 12 захвата кормов для последующей выгрузки кормов на конвейер. На траверсе 11 установлено средство 13 уплотнения сенажа и рулон 14 с полиэтиленовой или хлорвиниловой пленкой 15 для укрывания сенажа.
Установленное на траверсе 10 средство 12 захвата кормов выполнено в виде ковша с закрепленной на нем высокооборотистой фрезой. Ковш крепится посредством разъемных соединений (шплинтовых) в нижней части рамы вертикального (подвижного) рабочего штока, который обеспечивает подъем и опускание ковша по высоте бурта и в верхней своей части закреплен с возможностью перемещения подвижной части рамы рабочего штока в вертикальном направлении, а также вращение вокруг собственной оси посредством электропривода (гидропривода).
Наряду с выгрузкой корма ковш 12 вместе с траверсой 10 обеспечивает выравнивание (распределение) привезенного с поля силоса/сенажа по всему периметру модульной площадки, после чего выровненный слой силосуемой массы утрамбовывается с помощью средства 13 на траверсе 11. Средство 13 включает в качестве основного рабочего органа виброплиту, закрепленную на балках опорной траверсы с помощью четырех тросовых подъемно-транспортных механизмов. Нижняя поверхность виброплиты имеет гофрированную поверхность.
Траверса 11 также оснащена бобиной с укрывным рулонным материалом (могут быть использованы различные пленки, прорезиненные ткани и т.д.) и бункером для внесения биологически активных добавок. Перед уплотнением силосной массы/сенажа послойно вносятся (распыляются) различные биологически активные добавки. Входящие в состав силосной закваски молочнокислые бактерии являются действующим началом этих добавок. Быстрый перевод содержащегося в растениях сахара в молочную кислоту лишает дрожжевую микрофлору источников питания, а низкое значение рН - 4,5 и ниже силосуемой массы ингибирует развитие условно-патогенных бактерий, что приводит к сокращению потерь питательных веществ в 2,0-2,5 раза и улучшению качества корма по продуктам брожения.
Виброплита средства 13 крепится с помощью тросовых механизмов к нижней части рамы опорной траверсы 11 с возможностью ее периодического подъема и опускания на поверхность силосуемой массы путем вибрации под собственным весом. Ее размеры и масса определяются в зависимости от ширины модульной площадки. Таким образом, подвижная опорная траверса в заданном режиме осуществляет возвратно-поступательные движения вдоль модульной секции, послойно разравнивая и уплотняя силосуемую массу до оптимальных технологических значений плотности, при этом распыляя (послойно) различные силосные добавки (закваски) по ее поверхности, необходимые для обеспечения оптимального силосования.
После завершения процесса формирования сенажного/силосного бурта обеспечивается его тщательное укрытие, с этой целью закрепленная на кронштейнах к раме опорной траверсы 11 бобина с укрывным рулонным материалом наматывается на вал бобины посредством электромеханического (гидравлического) привода, опорная траверса 11 перемещается вдоль силосного бурта в его заднюю часть, а траверса 10 перемещается во фронтальную часть бурта, примыкающую к конвейеру 5.
Затем на траверсе 11 бобина с рулонным (укрывным) материалом снимается с положения фиксации и укрывной материал под действием грузовой планки, оснащенной якорными захватами, закрепленными по ее нижнему краю, опускается до пола платформы по всей ее ширине. После этого опорная траверса 11 начинает движение в направлении к траверсе 10 и по мере ее движения укрывной материал сматывается с бобины и накрывает силосуемую массу/сенаж от начала до конца силосного бурта.
Таким образом, вся заготовленная масса силоса находится под пленкой до момента достижения соответствующих технологических кондиций в соответствии с зоотехническими требованиями (готовность силоса к кормлению), после чего траверса 10 (ковш с фрезой) начинает осуществлять выемку силоса в заданном оператором режиме или с пульта управления. Шток траверсы 10 с закрепленными на ней ковшом и фрезой совершает возвратно-поступательные движения по вертикали и имеет возможность перемещаться вдоль траверсы 10 по всей ширине модульной площадки. После наполнения ковша опорная траверса двигается в направлении конвейера, и, по достижении осевой линии конвейера происходит выгрузка (опускание) непосредственно в створе ленточного (цепного) конвейера. При этом вертикальный шток опорной траверсы (с ковшом) может осуществлять круговые движения.
Крепления всех навесных технологических агрегатов к нижней части подвижной рамы рабочего штока осуществляется путем разъемных (шплинтовых) соединений, а также каждый навесной агрегат дополнительно фиксируется к нижней части рамы посредством штоков гидравлических цилиндров посредством разъемных соединений, которые фиксируют серьги гидроцилиндров как на раме, так и на самом технологическом агрегате (ковш, грейфер, вильчатый захват).
Технологический процесс по закладке на хранение и выемке силоса/сенажа осуществляется посредством двух независимых опорных траверс. Траверса 10 двигается от фронтальной части бурта к задней части и по мере экстракции силоса траверса 11 перемещается по мере приближения траверсы 10, сматывая при этом на бобину высвобождающийся укрывной материал, и обеспечивает рабочую зону для экстракции (выемки) силоса из бурта с помощью траверсы 10.
Все технологические операции осуществляются на основе сенсорного контакта как между двумя рабочими траверсами (первой и второй), так и между рабочими органами траверс и силосной массой, находящейся в бурте. Это позволяет оператору с пульта или же в автоматизированном режиме обеспечивать закладку на хранение и выемку силоса/сенажа.
В связи со значительным удельным весом силоса и сенажа в рационе в зависимости от количества животных может быть организовано несколько модульных площадок, оснащенных двумя тандемными траверсами, обеспечивающими в автоматическом режиме или с пульта операции по закладке и хранению силоса/сенажа.
Максимальная влажность силоса/сенажа с консервантами не должна превышать 60%, поэтому правильная технология силосования не предусматривает значительного выделения силосного «сока».
Аналогичным образом, с помощью опорных траверс, оснащенных в качестве основных рабочих органов различными вильчатыми захватами, дуговыми губчатыми захватами, грейферами с гидравлическим приводом на профильных платформах (модульных площадках) производится заготовка и хранение грубых кормов (сено, солома) в прессованном виде (рулоны или тюки) и кормовые концентраты (кормовые добавки).
Таким образом, на модульную площадку на специальных тракторных тележках подвозятся сено, сенаж в рулонах и выгружаются с задней стороны площадки, после чего траверса с вильчатым захватом (дуговым губчатым захватом), которым оснащается данная модульная площадка, начинает осуществлять процесс укладки рулонов (тюков) посредством нанизывания их на вильчатый захват и постепенной укладки их на фронтальной части модульной площадки, которая примыкает к линии конвейера. После укладки в штабель грубых кормов в рулонах данная опорная траверса, оснащенная вильчатым захватом, обеспечивает выгрузку определенного количества сена (сенажа) из штабеля непосредственно в рабочую камеру стационарного кормосмесителя.
Кормовые добавки и премиксы хранятся на отдельной платформе (модульной площадке) посекционно, при этом модульная площадка для хранения данных ингредиентов оснащается кровлей, которая обеспечивает защиту данных ингредиентов от осадков. Кровля (навес) крепится по верхней части стеновых блоков, а опорная траверса в данном случае движется по направляющим, которые крепятся на внутренней боковой поверхности стеновых блоков ниже кровли. В качестве основного рабочего органа данной траверсы используются различные грейферы с гидравлическим приводом.
Кормовые добавки и премиксы подвозятся на данную модульную площадку бестарным способом и разгружаются непосредственно в задней части модульной площадки (навалом), а затем уже перемещаются в соответствующие секции, где складируются посредством грейферного захвата. Таким образом, после заготовки основных грубых и сочных кормов и кормовых концентратов посекционно производство полнорационных кормов обеспечивается в автоматизированном режиме или с пульта.
С этой целью закладка грубых кормов (сено, сенаж), заготовленных в рулонах (тюках), как обязательных компонентов корма, происходит в первую очередь. Для этого опорная траверса, имеющая в качестве рабочего органа вильчатый захват (грейфер) с гидравлическим или любым другим приводом, обеспечивает извлечение грубого корма в рулонах (тюках) из штабеля в зависимости от зоотехнической потребности рациона в грубых кормах и подается непосредственно в кормосмеситель (измельчитель).
После предварительного измельчения грубых кормов в стационарном кормосмесителе добавляются сочные компоненты кормового рациона (силос, сенаж). С этой целью опорные траверсы, расположенные в модульных секциях, где хранятся силос, сенаж и др., обеспечивают в автоматическом режиме или с пульта управления выемку из бурта (штабеля) требуемого по рецепту количества сочных ингредиентов в виде резки посредством ковша (грейфера) с фрезой, оснащенной режущей поверхностью, или различных захватов с гидравлическим или электромеханическим приводом, в случае с рулонными материалами, после чего данные компоненты корма добавляются в кормосмеситель (измельчитель), где происходит дополнительное уплотнение грубых компонентов корма за счет массы сочных компонентов корма, имеющих большую влажность и удельный вес. Таким образом происходит более интенсивное взаимодействие и смешивание между ингредиентами кормового рациона, так как увлажнение общей массы корма снижает его фракционирование и создает большую гомогенность кормовой смеси, обеспечивая максимальную эффективность воздействия рабочих органов кормосмесителя (миксера) на кормовую массу.
На заключительном этапе кормосмесь обогащается концентрированными кормами и витаминно-минеральными добавками, хранящимися посекционно на одной из модульных площадок как в гранулированном виде, так и в виде порошка.
Все средства, которые устанавливаются на опорные траверсы и работающие с грубыми, сочными и концентрированными кормами, оснащаются весовыми датчиками, позволяющими контролировать вес изымаемых из бурта (штабеля или насыпи) кормовых ингредиентов, таким образом обеспечивая поступление информации о перемещаемых в стационарный кормосмеситель весовых доз соответствующих ингредиентов. Это в конечном итоге позволяет осуществлять производство полнорационного корма в соответствии с заданной рецептурой в автоматическом режиме или с пульта управления. С этой целью соответствующая траверса, оснащенная ковшовым захватом (грейфером) с гидравлическим или электромеханическим приводом, в автоматическом режиме подает в кормосмеситель (измельчитель) непосредственно или через конвейер соответствующий вид концентрата (добавки) в заданном согласно рецептуре количестве. Ввиду того что подача концентратов (кормовых добавок) в рабочую камеру кормосмесителя (измельчителя) происходит уже после предварительного смешивания грубых и сочных компонентов кормового рациона, вся кормосмесь уже приобретает повышенную влажность, и подача концентратов (добавок) на поверхность смешиваемой массы корма позволяет обеспечить наиболее эффективное смешивание их с основными ингредиентами кормового рациона за счет постепенного перемещения их частиц из верхней части рабочей камеры кормосмесителя (миксера) в нижнюю, постепенно увлажняясь и обеспечивая тем самым наиболее равномерное их распределение в массе корма.
В дальнейшем по завершении цикла смешивания кормосмесь подается из смесителя кормов (миксера) посредством конвейеров непосредственно на животноводческую ферму для скармливания. Но возможен и вариант сменного смесителя кормов. После заполнения одного смесителя кормов на его место становится другой смеситель кормов, а предыдущий транспортируется на животноводческую ферму для выдачи кормосмеси животным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для приготовления и раздачи кормов | 2019 |
|
RU2708427C1 |
| Мобильный кормосмеситель | 2017 |
|
RU2642122C1 |
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| УНИВЕРСАЛЬНЫЙ ПОГРУЗЧИК КОРМОВ | 2004 |
|
RU2280352C2 |
| Способ производства влажных консервированных травянистых кормов для животных с использованием кормовой добавки Reasil Humic | 2022 |
|
RU2797367C1 |
| Способ приготовления кормосмесей | 1984 |
|
SU1355224A1 |
| Способ производства влажных консервированных травянистых кормов для животных с использованием кормовой добавки Reasil® Humic | 2022 |
|
RU2806162C1 |
| Цех для приготовления кормов | 1989 |
|
SU1777778A1 |
| Способ приготовления кормосмеси для лактирующих коров | 2023 |
|
RU2808183C1 |
| КОРОВНИК | 1992 |
|
RU2045171C1 |
Изобретение относится к области сельского хозяйства. Система содержит платформу для хранения кормов, смеситель кормов и установленное над платформой для хранения кормов устройство перемещения кормов вдоль платформы, включающее траверсу и средство захвата кормов. Система включает по меньшей мере две платформы (1, 2, 3) для хранения кормов и конвейер (5), вытянутый поперек по меньшей мере одной из платформ (2, 3) для хранения кормов и установленный с возможностью перемещения кормов в смеситель (4) кормов. Устройства перемещения кормов вдоль платформы, включающие траверсу (6, 7, 8) и средство захвата кормов, установлены над каждой платформой (1, 2, 3) для хранения кормов с возможностью перемещения вдоль них и выгрузки кормов на конвейер (5) или смеситель (4) кормов. Обеспечивается увеличение производительности приготовления кормов. 4 з.п. ф-лы, 2 ил.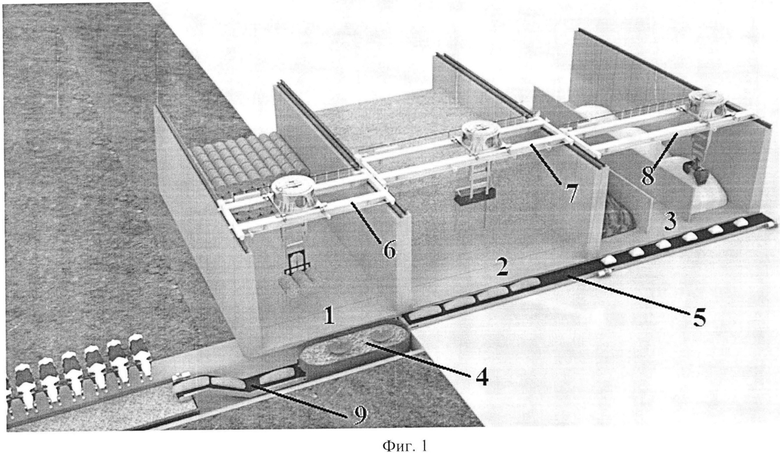
1. Система приготовления кормов для животных, включающая платформу для хранения кормов, смеситель кормов и установленное над платформой для хранения кормов устройство перемещения кормов вдоль платформы, включающее траверсу и средство захвата кормов, отличающаяся тем, что включает по меньшей мере две платформы для хранения кормов и конвейер, вытянутый поперек по меньшей мере одной из платформ для хранения кормов и установленный с возможностью перемещения кормов в смеситель кормов, а устройства перемещения кормов вдоль платформы, включающие траверсу и средство захвата кормов, установлены над каждой платформой для хранения кормов с возможностью перемещения вдоль них и выгрузки кормов на конвейер или смеситель кормов.
2. Система по п.1, отличающаяся тем, что включает три платформы для хранения кормов, смеситель кормов расположен с возможностью выгрузки в него кормов устройством перемещения кормов, установленным над одной из платформ для хранения кормов, а конвейер расположен с возможностью выгрузки в него кормов устройствами перемещения кормов, установленными над двумя другими платформами для хранения кормов с возможностью перемещения вдоль них и выгрузки кормов на конвейер.
3. Система по п.1, отличающаяся тем, что средство захвата кормов установлено на траверсе с возможностью перемещения вдоль нее.
4. Система по п.1, отличающаяся тем, что включает платформу для хранения сенажа с установленной над ней на продольных направляющих дополнительной траверсой со средствами уплотнения и укрывания сенажа.
5. Система по п.1, отличающаяся тем, что смеситель кормов выполнен с возможностью перемещения и выдачи кормов в кормушки животным.
| WO 2013157928 A1, 24.10.2013 | |||
| WO 2008097080 A1, 14.08.2008 | |||
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИИ ДЛЯ ПОЛИУРЕТАНОВОГО ПОКРЫТИЯ | 1998 |
|
RU2151160C1 |
| Раздатчик кормов | 1982 |
|
SU1166756A1 |

