1
(21)4780590/29 (22)11.01.90 (46)30.09.92. Бюл. №36
(71)Литовская сельскохозяйственная академия
(72)А.И.Я нуля вичюс
(56)Авторское свидетельство СССР № 1681748, кл. А 01 В 63/10, 1990.
(54) РЕГУЛЯТОР ГИДРОСИСТЕМЫ УПРАВ- ЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМИ ОРУДИЯМИ
(57)Изобретение относится к машиностроению и может быть использовано в гидравлических системах управления навесными орудиями сельскохозяйственных машин. Цель изобретения - упрощение конструкции и повышение надежности. Внутри корпуса регулятора расположены обратный
клапан, управляемый клапан, золотник управления, золотник регулирования, первый магистральный канал, второй магистральный канал, канал управления, нагнетательный канал, канал слива. Кроме того, корпус снабжен дополнительным каналом, соединенным с золотником управления,золотником регулирования и пружинной полостью управляемого клапана. Поршень управляемого клапана снабжен регулируемой опорой. Нагнетательный канал соединен с беспружинной полостью управляемого клапана с возможностью перекрытия его поршнем. Данное техническое решение позволяет за счет уменьшения числа каналов упростить конструкцию распределителя и повысить надежность работы гидросистемы. 8 ил.
сл С


| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1989 |
|
SU1681748A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1643815A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Гидросистема сельскохозяйственного трактора | 1989 |
|
SU1710869A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1706416A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидросистема управления сельскохозяйственными орудиями | 1989 |
|
SU1830431A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |

Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для управления и автоматического регулирования рабочего положения навесных и полунавесных сельскохозяйственных машин.
Цель изобретения - расширение функций и упрощение конструкции путем создания возможности опускания регулятором орудия в рабочее положение и поднятия из него в транспортное положение и обеспечение возможности его одновременной работы от двух различных датчиков регулирования, т.е. возможность принятия одновременно действий сигналов от силового и позиционного датчиков регулирования и использования их в виде суммированного сигнала и уменьшения
гидравлических связей с другими гидроагрегатами в гидросистеме.
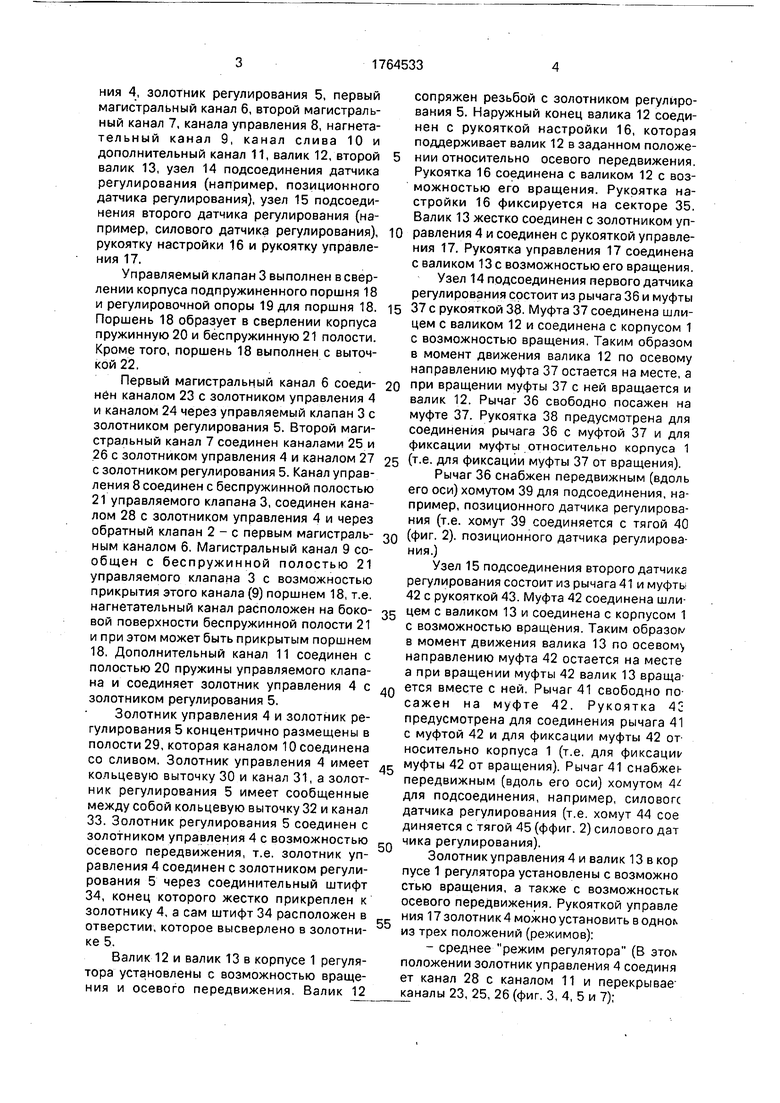
На фиг. 1 изображен регулятор при опускании орудия в рабочее положение; на фиг.
2показаны датчики регулирования; на фиг.
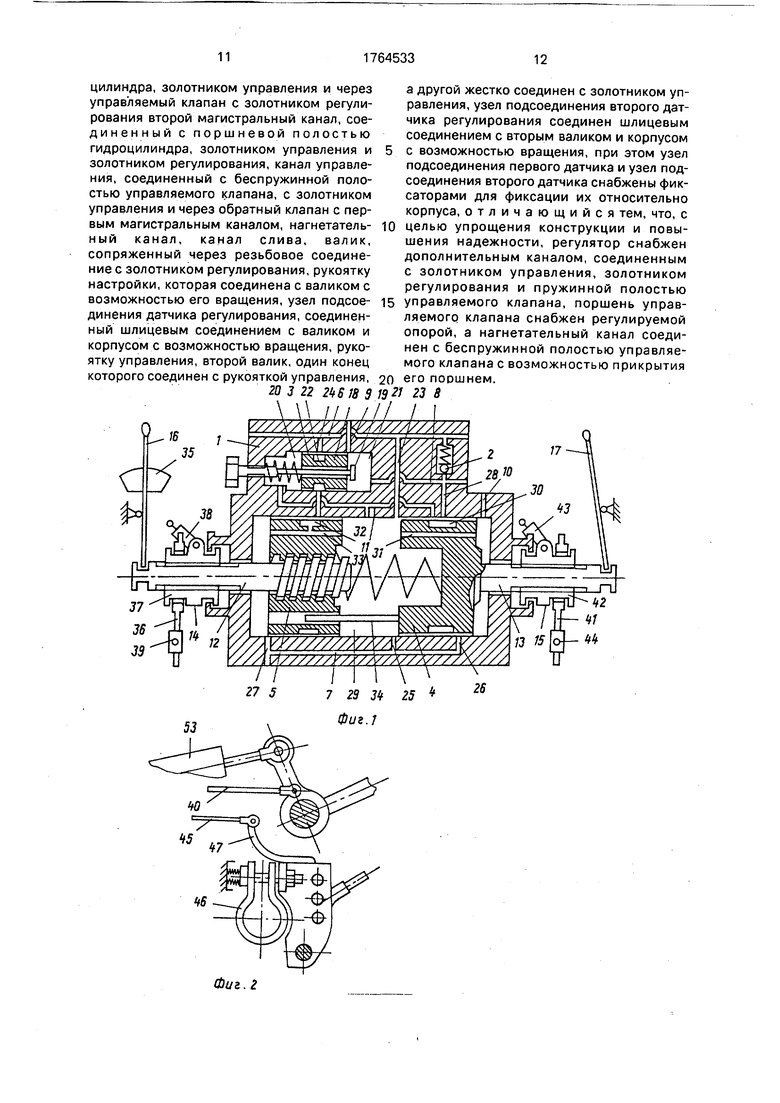
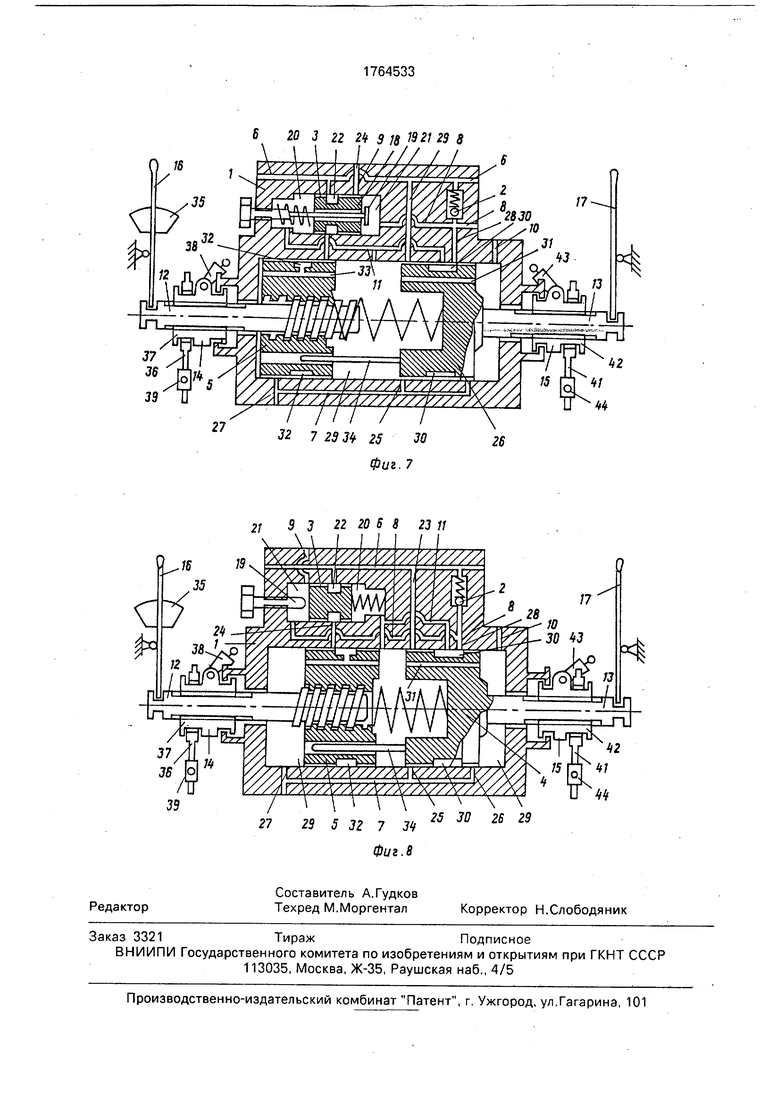
3изображена схема гидросистемы с предложенным регулятором при рабочем положении орудия; на фиг. 4 показан регулятор при коррекции орудия на подъем; на фиг. 5 - регулятор при коррекции орудия на опускание; на фиг. 6 - регулятор при подъеме орудия в транспортное положение; на фиг. 7 - регулятор при транспортировании орудия; на фиг. 8 представлен регулятор, в котором управляемый клапан выполнен по второму варианту.
Регулятор гидросистемы содержит размещенные в корпусе 1 обратный клапан 2, управляемый клапан 3, золотник управлеi4
lOs
i
СЛ СО ICJ
ния 4, золотник регулирования 5, первый магистральный канал 6, второй магистральный канал 7, канала управления 8, нагнета- тельный канал 9, канал слива 10 и дополнительный канал 11, валик 12, второй валик 13, узел 14 подсоединения датчика регулирования (например, позиционного датчика регулирования), узел 15 подсоединения второго датчика регулирования (например, силового датчика регулирования), рукоятку настройки 16 и рукоятку управления 17.
Управляемый клапан 3 выполнен в сверлении корпуса подпружиненного поршня 18 и регулировочной опоры 19 для поршня 18. Поршень 18 образует в сверлении корпуса пружинную 20 и беспружинную 21 полости. Кроме того, поршень 18 выполнен с выточкой 22.
Первый магистральный канал 6 соединен каналом 23 с золотником управления 4 и каналом 24 через управляемый клапан 3 с золотником регулирования 5. Второй магистральный канал 7 соединен каналами 25 и 26 с золотником управления 4 и каналом 27 с золотником регулирования 5. Канал управления 8 соединен с беспружинной полостью 21 управляемого клапана 3, соединен каналом 28 с золотником управления 4 и через обратный клапан 2-е первым магистральным каналом 6. Магистральный канал 9 сообщен с беспружинной полостью 21 управляемого клапана 3 с возможностью прикрытия этого канала (9) поршнем 18, т.е. нагнетательный канал расположен на боковой поверхности беспружинной полости 21 и при этом может быть прикрытым поршнем 18. Дополнительный канал 11 соединен с полостью 20 пружины управляемого клапана и соединяет золотник управления 4 с золотником регулирования 5.
Золотник управления 4 и золотник регулирования 5 концентрично размещены в полости 29, которая каналом 10 соединена со сливом. Золотник управления 4 имеет кольцевую выточку 30 и канал 31, а золотник регулирования 5 имеет сообщенные между собой кольцевую выточку 32 и канал
34,конец которого жестко прикреплен к золотнику 4, а сам штифт 34 расположен в отверстии,которое высверлено в золотнике 5.
Валик 12 и валик 13 в корпусе 1 регулятора установлены с возможностью вращения и осевого передвижения, Валик 12
0
5
0
5
0
5
0
5
0
5
сопряжен резьбой с золотником регулирования 5. Наружный конец валика 12 соединен с рукояткой настройки 16, которая поддерживает валик 12 в заданном положении относительно осевого передвижения. Рукоятка 16 соединена с валиком 12 с возможностью его вращения. Рукоятка настройки 16 фиксируется на секторе 35. Валик 13 жестко соединен с золотником управления 4 и соединен с рукояткой управления 17. Рукоятка управления 17 соединена с валиком 13с возможностью его вращения.
Узел 14 подсоединения первого датчика регулирования состоит из рычага 36 и муфты 37 с рукояткой 38. Муфта 37 соединена шлицем с валиком 12 и соединена с корпусом 1 с возможностью вращения, Таким образом в момент движения валика 12 по осевому направлению муфта 37 остается на месте, а при вращении муфты 37 с ней вращается и валик 12. Рычаг 36 свободно посажен на муфте 37. Рукоятка 38 предусмотрена для соединения рычага 36 с муфтой 37 и для фиксации муфты относительно корпуса 1 (т.е. для фиксации муфты 37 от вращения).
Рычаг 36 снабжен передвижным (вдоль его оси) хомутом 39 для подсоединения, например, позиционного датчика регулирования (т.е. хомут 39 соединяется с тягой 40 (фиг. 2). позиционного датчика регулирования.)
Узел 15 подсоединения второго датчика регулирования состоит из рычага 41 и муфты 42 с рукояткой 43. Муфта 42 соединена шлицем с валиком 13 и соединена с корпусом 1 с возможностью вращения. Таким образов в момент движения валика 13 по осевому направлению муфта 42 остается на месте а при вращении муфты 42 валик 13 враща ется вместе с ней. Рычаг 41 свободно по сажен на муфте 42. Рукоятка 42 предусмотрена для соединения рычага 41 с муфтой 42 и для фиксации муфты 42 от носительно корпуса 1 (т.е. для фиксациь- муфты 42 от вращения). Рычаг 41 снабжен передвижным (вдоль его оси) хомутом 4 для подсоединения, например, силовогс датчика регулирования (т.е. хомут 44 сое диняется с тягой 45 (ффиг. 2) силового дат чика регулирования).
Золотник управления 4 и валик 13 в кор пусе 1 регулятора установлены с возможно стью вращения, а также с возможностьк осевого передвижения. Рукояткой управле ния 17 золотник 4 можно установить воднол из трех положений (режимов):
- среднее режим регулятора (В этог положении золотник управления 4 соединя ет канал 28 с каналом 11 и перекрывав каналы 23, 25, 26 (фиг, 3, 4, 5 и 7);
-левое (по чертежу) режим подъема (В этом положении золотник управления 4 перекрывает каналы 28, 23 а, канал 7 соединяет со сливом, т.е. с полостью 29 (фиг. 6);
- правое (по чертежу) режим опускания (в этом положении золотник 4 соединяет каналы 23 и 25 с полостью 29, а канал 28 с каналом 11 (фиг. 1).
В ходе эксплуатации в зависимости от характера местности и от заданных агротехнических требований выполнения операции выбирают один из видов регулирования или их комбинацию.
Для позиционного регулирования положения навесного орудия (машины) муфту 37 жестко(при помощи рукоятки 38)соединяют с рычагом 36, который кинематически соединен с позиционным датчиком регулирования, а муфту 42 жестко соединяют (при помощи рукоятки 43) с корпусом 1 регулятора (фиг. 1). При изменении положения известного орудия позиционный датчик регулирования поворачивает рычаг 36, который передает вращение на валик 12. При этом валик 13 остается неподвижным, и поворот валика 12 вызывает изменение положения золотника регулирования 5 регулятора, воздействующего на гидроцилиндр для восстановления первоначально заданного положения орудия.
Для силового регулирования положения навесного орудия муфту 42 жестко соединяют (при помощи рукоятки 43) с рычагом 41, который кинематически соединен с силовым датчиком регулирования, а муфту 37 - жестко соединя ют (п ри помощи рукоятки 38) с корпусом 1 регулятора (фиг. 3). При изменении тягового сопротивления орудия, например, возрастание), пружина 46 силового датчика (фиг. 2) сжимается, и рычаг 47,воздействуя через тягу 45, поворачивает рычаг 41, который передает вращение на валик 13 и золотник 4. При этом валик 12 остается неподвижным, и поворот золотника 4 изменяет положение золотника регулирования 5 регулятора. Коррекция от золотника 5 на гидроцилиндр механизма навески приводит к выглублению навесного орудия из почвы и восстановлению первоначально заданного положения регулятора усилия.
Для смешанного (силового-позиционного) регулирования положения навесного орудия муфту 37 жестко соединяют (при помощи рукоятки 38) с рычагом 36, который кинематически соединен с позиционным датчиком регулирования, а муфту 42 жестко соединяют (при помощи роукоятки 43) с рычагом 41, который кинематически соединен с силовым датчиком регулирования (показано на фиг. 4). При изменении положения
навесного орудия и соответственном изменении тягового сопротивления орудия позиционный датчик регулирования поворачивает рычаг 36, который передает
вращение на валик 12, а силовой датчик регулирования поворачивает в противоположное направление рычаг 41, который передает вращение на валик 13 и золотник 4. Повороты валиков 12 и 13 вызывает сумми0 рованное изменение положения золотника регулирования 5 регулятора, воздействующего на гидроцилиндр для восстановления первоначального заданного положения орудия (повороты валиков 12 и 13 в противопо5 ложные направления вызывают
перемещения золотника 5 в одну сторону).
При срабатывании одного из датчиков и
повороте соответствующего ему рычага 36
или 41 соответствующий валик 12 или 13
0 перемещает золотник регулирования 5 регулятора. Коррекция давления от золотника 5 регулятора на гидроцилиндр механизма навески вызывает изменение положения механизма навески (подъем или опускание) и
5 срабатывание второго датчика, чтот приводит к перемещению золотника 5 регулятора в обратном направлении, т.е. к прекращению коррекции давления в гидроцилиндре. Таким образом коррекция золотника 5 регу0 лятора на гидроцилиндр механизма навески от одного из датчиков регулирования ограничивается действием второго датчика регулирования.
Преобладание соответствующего
5 сигнала (позиционного или силового регулирования) устанавливается путем передвижения соответствующего хомута 39 или 44 на соответствующий рычаг.
Предложенный регулятор может быть
Q использован в сельскохозяйственном тракторе, имеющем датчики регулирования (фиг. 2) и гидросистему, включающую бак 48 (фиг. 3). гидронасос 49, распределитель 50 с перепускным клапаном 51 и каналом управле5 ния 52 перепускного клапана и гидроцилиндр 53 для управления навесным механизмом трактора. При этом гидронасос 49 соединен всасывающей магистралью 54 с баком 48, а нагнетательной магистралью 55 - с регулятором и рас- пределителем 50. Конец канала управления 52 распределителя соединен магистралью 56 и каналом управления 8 регулятора. Гидроцилиндр 53 подсоединен к регулятору, т.е. штоковая (подъема) полость 57 соединена магистралью 58 с магистральным каналом 6 регулятора, а поршневая полость 59 соединена магистралью 60 с магистральным каналом 7 регулятора. Канал слива 10 регулятора и
0
5
полость 61 распределителя соединены магистралью 62 с баком 48 через фильтр 63.
Кроме того, гидросистема трактора может содержать гидроаккумулятор 64 с подвижным элементом 65. При этом рабочая полость 66 гидроаккумулятора 64 соединена магистралью 67 через кран 68 с магистральным каналом 6 регулятора.
При необходимости использовать высотное регулирование с увеличением сцеп- ного веса тягу 69 датчика давления (гидроаккумулятора 64) необходимо соединять с хомутом 44 вместо тяги 45 силового датчика регулирования или с хомутом 39 вместо тяги 40 позиционного датчика регулирования.
Гидросистема сельскохозяйственного трактора с предложенным регулятором работает следующим образом.
Опускание сельскохозяйственного орудия осуществляют при установке золотника управления 4 регулятора в положение Опускание (фиг. 1). В этом положении золотник 4 соединяет каналы 23 и 25 с полостью 29, а канал 28 - с каналом 11. При этом перепускной клапан 51 распределителя открывается, так как канал управления 52 сообщен со сливом, и.е. с баком 48 по магистрали 56, каналам 8, 28, выточке 30, каналу 11, полости 29, каналу 10 и магистрали 62. В этом случае основная масса масла от гидронасоса 49 поступает магистралью 55 в распреде- литель 50, в котором через открытый перепускной клапан 51 поступает в полость 61, из которой магистралью 62 - в бак 48. Кроме того, соответственная часть масла на слив поступает через регулятор, т.е. через приоткрытый нагнетательный канал 9 поступает в полость 21, из которой по каналам 8, 28, выточке 30, каналу 11, полости 29, каналу 10 и магистрали 62 в бак 48. В данном случае из штоковой (подъемной) полости 57 гидроцилиндра 53 масло вытесняется (под действием веса орудия) по магистрали 58, каналам 6, 23, в полость 29, из которой поступает по каналу 10 и магистрали 62 в бак 48. Орудие опускается. Опустив орудие до почвы, золотник регулирования 5 занимает положение, которое показано на фиг. 1, или близкое к этому. Уже тогда золотник управления 4 можно установить в положение регулятора (как показано на фиг. 3). В этом положении золотник управления 4 перекрывает вытекание масла из штоковой полости 57 гидроцилиндра по каналу 23. Тогда, пока орудие не опустилось до заданного рабочего положения, масло из штоковой полости 57 гидроцилиндра 53 вытесняется через канал 24, т.е. по магистрали 58, каналу 6, каналу 24 (проход через управляемый клапан открытый, так как беспружинная полость 21 соединена со сливом), далее - через выточку 32 и канал 33 в
золотнике 5 в полость 29, из которой по каналу 10 и магистрали 62 в бак 48. Опускание орудия таким образом происходит до тех пор, пока под действием датчиков регулирования золотник 5 установит его в поло0 жение, при котором он отьединит свою кольцевую выточку 32 от канала 24. Когда орудие занимает заданное рабочее положение, тогда золотник 5 перекрывает канал 24 (фиг. 3). При этом штоковая полость 57 гид5 роцилиндра 53 окажется запертой, и орудие поддерживается в заданном рабочем положении.
Если затем положение сельскохозяйственного орудия изменяется, например, глу0 бина обработки почвы увеличивается, то датчики регулирования (через механизм передачи) перемещают золотник 5 вправо (это позиция на фиг. 4). Тогда золотник 5 перекроет (частично или полностью) в зависимо5 сти от глубины поступления масла на слив из канала 11. После закрытия канала 11 закрывается перепускной клапан 51 распределителя, тогда возрастает давление в нагнетательной магистрали 55, а также и в
0 канале 8, и масло поступает через обратный клапан 2 в канал 6, из которого магистралью 58 поступает в штоковую полость 57 гидроцилиндра 53 из противоположной полости (поршневой полости 59) гидроцилиндра
5 масло вытесняется поршнем по магистрали 60, каналу 27 в полость 29, которая соединена со сливом. В результате орудие поднимается, и датчики регулирования (через механизм передачи) обратно устанавливаQ ют золотник 5 в нейтральное положение (в позицию, показанную на фиг. 3).
Канал 9 может быть прикрытым (регулировочным краном 3) и в ходе коррекции на подъем весь поток масла пройти не может,
5 в этом случае в магистрали до регулировочного крана 3 дальше увеличивается больше, чем в канале 8 (т.е. в нагнетательной магистрали увеличивается больше, чем в канале управления перепускного клапана), тогда открывается перепускной клапан 51 распределителя 50, и избыток масла направляется на слив через перепускной клапан 51 распределителя 50.
Если глубина обработки почвы уменьшается, то датчики регулирования подают
0
5
сигнал в противоположную сторону, и золотник регулирования 5, переместившись влево (фиг. 5), соединяет канал 24 с выточкой 32 золотника 5. Орудие опускается под действием своего веса. В этом случае из штоковой полости 57 гидроцилиндра 53 масло вытесняется на слив по магистрали 58, каналам 6,24 выточке 32, каналу 33 в полость 29, которая каналом 10 соединена и магистралью 62 соединена с баком 48. После заглубления рабочих органов до заданного рабочего положения датчики регулирования опять устанавливают золотник регулирования 5 в нейтральное положение (в позицию, показанную на фиг. 3).
Для поднятия орудия в транспортное положение золотник 4 устанавливают в положение Подъем (фиг. 6). В этом положении золотник 4 перекрывает канал 28, а канал 26 соединяет с полостью 29. При этом закрывается перепускной клапан 51 распределителя, так как канал управления 52 распределителя отъединяется от слива. При этом возрастает давление в нагнетательной магистрали 55, тем самым в канале 8 и в полости 21 и передвигается влево поршень 18, так как полость 20 в этом случае каналом 11 соединена с полостью 29, которая всегда сообщена со сливом. В данном случае весь поток масла от гидронасоса 49 поступает по нагнетательной магистрали 55, каналу 9, полости 21, каналу 8, дапее через обратный клапан 2, каналу 6 и магистрали 58 в штоко- вую полость 57 гидроцилиндра 53. Орудие поднимается. Из противоположной полости (поршневой полости 59) гидроцилиндра 53 масло вытесняется поршнем по магистрали 60, каналам 27, 7, 26 в полость 29, которая каналом 10 и магистралью 62 соединена с баком 48. Подняв орудие в транспортное положение, золотник 4 управления устанавливают в положение Регулятор (фиг. 7). В транспортном положении агрегата золотник 5 занимает крайнее левое положение (или близкое к этому). При этом штоковая полость 57 и поршневая полость 59 гидроцилиндра 53 окажутся отъединенными от сливных магистралей золотниками 4 и 5 регулятора. Масло от гидронасоса 49 магистралью 55 поступает в распределитель 50, в котором через открытый перепускной клапан 51 поступает в полость 61, из которой магистралью 62 в бак 48. Перепускной клапан 51 открыт, так как канал управления 52 сообщен со сливом, т.е. с баком 48 по магистрали 56, каналам 8, 28 выточке 30, каналу 11, полости 29, каналу 10 и магистрали 62.
При работе гидросистемы в режиме высотного регулирования с увеличением сцеп- ного веса тягу 69 датчика давления (гидроаккумулятора 67) необходимо кинематически соединять, например, с хомутом 44 (вместо тяги 45 силового датчика регулирования). Тогда муфту 42 жестко соединяют (при помощи рукоятки 43) с рычагом 41, а
муфту 37 жестко соединяют (при помощи рукоятки 38) с корпусом 1 регулятора. Кроме того, открывают кран 68, т.е. рабочую полость 66 гидроаккумулятора 64 соединяют
со штоковой полостью 57 гидроцилиндрэ 53. В дан ном случае рукояткой 16 на секторе 35 задаем давление в штоковой полости 57 гидроцилиндра 53. Заданное давление поддерживает регулятор гидросистемы. Регулятор работает аналогично, как и при силовом позиционном регулировании.
Когда автоматическое регулирование (регулятор) не используется, рукоятки 38 и 43 устанавливают в среднее положение или
соединяют с корпусом 1 регулятора. В этом случае золотник 5 регулятора занимает крайнее левое положение и перекрывает каналы 24 и 27, а канал 11 остается открытым, т.е. соединенным с полостью 29. Кроме того,
в этом режиме целесообразно закрыть регулировочный кран 3. При этом золотником управления 4 управляют механизмом навески трактора, т.е. управляют гидроцилиндром 53.
Предложенное техническое решение позволяет расширять функции регулятора путем создания возможности регулятором управлять гидроцилиндром механизма навески и расширять функции регулятора путем обеспечения возможности его одновременной работы от двух различных датчиков регулирования, т.е. позволяет принять одновременно действие сигналов от силового и позиционного датчиков регулирования и использовать их в виде суммированного сигнала. При этом предложенное техническое решение позволяет упростить конструкцию устройства для управления и поддерживания в рабочем положении сельскохозяйственного орудия агрегатируемого с трактором.
Аналогичным образом работает регулятор гидросистем управления сельскохозяйственными орудиями, изображенный на
Фиг. 8.
Формула изобретения
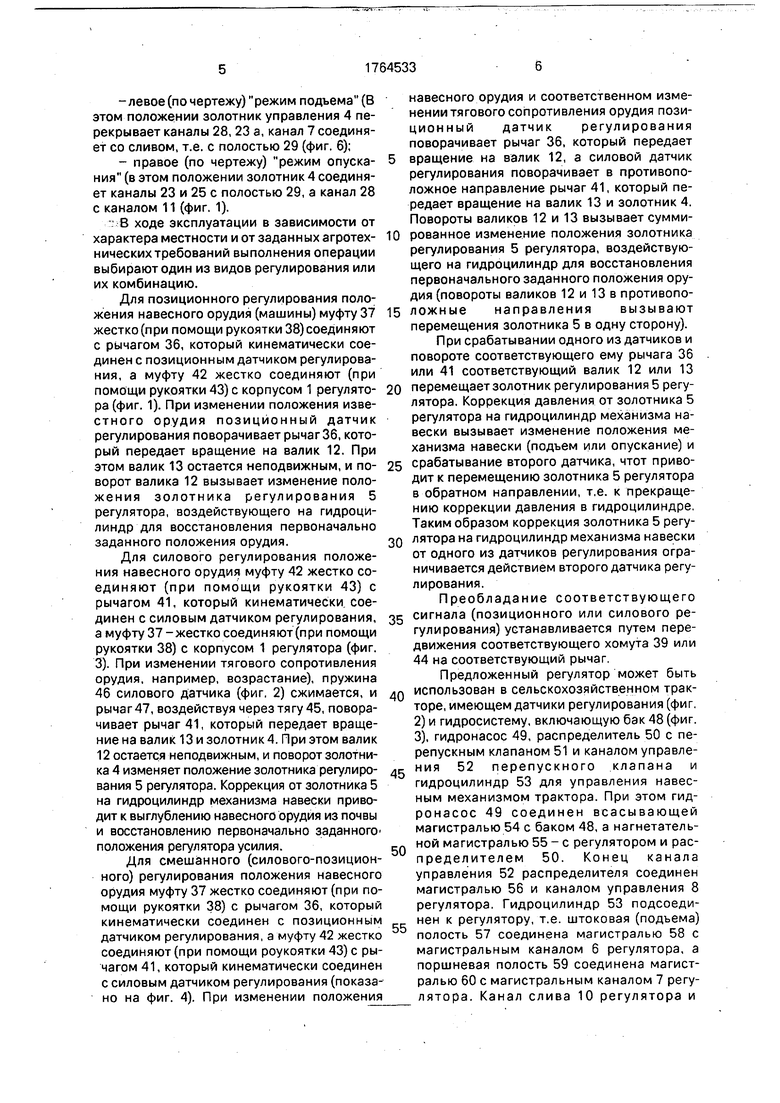
Регулятор гидросистемы управления сельскохозяйственными орудиями, содержащий размещенные в кррпусе обратный клапан, управляемый клапан, выполненный в виде подпружиненного поршня, образующего при размещении в корпусе пружинную и беспружинную полости, соосно расположенные золотник управления и золотник регулирования, соединенные друг с другом с возможностью относительного осевого перемещения, первый магистральный канал, соединенный со штоковой полостью гидро
цилиндра, золотником управления и через управляемый клапан с золотником регулирования второй магистральный канал, сое- диненный с поршневой полостью гидроцилиндра, золотником управления и золотником регулирования, канал управления, соединенный с беспружинной полостью управляемого клапана, с золотником управления и через обратный клапан с первым магистральным каналом, нагнетатель- ный канал, канал слива, валик, сопряженный через резьбовое соединение с золотником регулирования, рукоятку настройки, которая соединена с валиком с возможностью его вращения, узел подсое- динения датчика регулирования, соединенный шлицевым соединением с валиком и корпусом с возможностью вращения, рукоятку управления, второй валик, один конец которого соединен с рукояткой управления,
20 3 22 2Ь618 3
111 1
W
Фиг. 2
а другой жестко соединен с золотником управления, узел подсоединения второго датчика регулирования соединен шлицевым соединением с вторым валиком и корпусом с возможностью вращения, при этом узел подсоединения первого датчика и узел подсоединения второго датчика снабжены фиксаторами для фиксации их относительно корпуса, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, регулятор снабжен дополнительным каналом, соединенным с золотником управления, золотником регулирования и пружинной полостью управляемого клапана, поршень управляемого клапана снабжен регулируемой опорой, а нагнетательный канал соединен с беспружинной полостью управляемого клапана с возможностью прикрытия его поршнем.
со со
LO
чСО
гсо со ю
3
то;
&
Б 20 3 22 2 9 18 J92J & 8
27
4VJJJp W4X I IЦЧЧЧЧДуГуд
/Л////1/Л///АУ//}///А VJ//J/l//l///f///Y///.
//////
32 7 2934- 25 30 Фиг. 7
$3 22 20 В 8 23 U
зд
27 29 5 32 7 3, 25 3° 2B Фиг. 8
