Настоящее изобретение относится к области машиностроения и может быть использовано для определения запаса движущего момента в шарнирных устройствах (ШУ) космических летательных аппаратов над моментами сопротивления как в нормальных условиях, так и при экстремальных температурах.
Из существующего уровня техники известен способ испытаний шарнирных устройств механических систем (патент RU2394218, G01M 13/02, 10.07.2010), заключающийся в том, что при реализации способа осуществляют поворот шарнирного устройства, установленного в механическую систему космического аппарата при помощи технологического электропривода в прямом направлении, и измеряют при помощи датчика результирующий крутящий момент поворота шарнирного устройства в прямом направлении Μ1(φ), а затем осуществляют поворот шарнирного устройства в обратном направлении и измеряют результирующий крутящий момент поворота шарнирного устройства в обратном направлении М2(φ), после чего определяют момент сопротивления шарнирного устройства повороту Mc(φ) по формуле
 где
где
- Мст(φ) - момент сопротивления стенда повороту φ без шарнирного устройства (определяется заранее при аттестации стенда);
- φ - угол раскрытия шарнирного устройства (стенда при аттестации).
Также известен способ испытаний шарнирных устройств механических систем (патент RU2460983, G01M 13/00, 10.09.2012), направленный на определение момента сопротивления шарнирного устройства повороту φ на стенде при экстремальных температурах, заключающийся в том, что осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, с заранее заданной минимальной скоростью в прямом и обратном направлениях в нормальных условиях и измеряют при помощи датчика результирующий крутящий момент поворота шарнирного устройства в прямом 



 где
где
- 
- φ - угол раскрытия шарнирного устройства (стенда при аттестации). Описанный способ принят за прототип.
Недостатками данных технических решений является наличие дополнительных погрешностей в точности определения моментов сопротивления, действующих в ШУ, таких как сопротивления в стенде определения момента сопротивления в ШУ (определяется заранее при аттестации стенда и не может быть точно определена к каждому конкретному случаю раскрытия ШУ), а также аэродинамические сопротивления атмосферного воздуха, оказывающие существенное влияние на конструкции, обладающие большой парусностью раскрываемых элементов, предназначенные для эксплуатации в космическом пространстве. Перечисленные недостатки приводят к неточностям в определении моментов сопротивления, действующих в ШУ, а вместе с этим к неправильной оценке основного параметра надежности функционирования механических систем разового срабатывания - запаса движущего момента ШУ (превышения движущего момента над моментом сопротивления). Также к недостаткам данных способов необходимо отнести их трудоемкость, связанную, прежде всего, с балансировкой крупногабаритных конструкций, необходимой для уменьшения влияния массы под действием гравитационных сил, т.к. при штатной эксплуатации в составе космического аппарата на механические устройства они не влияют. При неточной балансировке значительно увеличивается погрешность измерений момента сопротивления ШУ за счет влияния дисбаланса крупногабаритных конструкций, при этом необходимо отметить, что влияние сил дисбаланса для данного способа определения моментов сопротивления исключить невозможно. Кроме этого недостатком является отсутствие возможности автономной проверки моментов сопротивления в механизмах ШУ, что позволило бы на более ранних этапах определять моменты сопротивления в шарнирных устройствах, а соответственно, на ранних этапах отслеживать и устранять ошибки при проектировании и разработки ШУ в случае наземной экспериментальной отработки изделий, а также выявлять неточности и брак при изготовлении летной продукции.
Среди недостатков способа, принятого за прототип, необходимо отметить, что такой способ определения моментов сопротивления, а особенно при определении моментов сопротивления при воздействии экстремальных температур (как правило, для крупногабаритных механических устройств проверки проводятся при температурах минус 100ºС и 100º), достаточно сложно применим к современным конструкциям крупногабаритных космических аппаратов, имеющим большие площади раскрываемых элементов. На сегодняшний день разработаны и эксплуатируются космические аппараты, имеющие в своем составе механическое устройство батареи солнечной, включающее в свой состав пять раскрываемых на угол 180º панелей, предназначенных для размещения на ней фотопреобразовательных элементов площадью 10 м2 (4×2,5 м) и штангу, раскрываемую на угол 90º длиной 3,3 м). Для такого типа конструкции требуется специальное оснащение - стенды раскрытия и огромного размера термобарокамеры (ТБК), а также большой объем энергоресурсов для охлаждения и нагрева конструкции механического устройства в ТБК. При этом необходимо поддерживать определенные температуры на стенде раскрытия и других технологических элементах, чтобы не создать дополнительных сопротивлений при раскрытии механического устройства батареи солнечной (МУ БС). Кроме этого к недостаткам данного способа необходимо отнести тот факт, что при определении моментов сопротивления при экстремальных температурах не оцениваются сопротивления, возникающие в стенде раскрытия при экстремальных температурах. Также данный способ не рассматривает возможности определения запаса движущего момента в ШУ - превышение момента, создаваемого штатными приводами ШУ, над моментами сопротивления ШУ, действующими при раскрытии, для чего собственно и проводится определение моментов сопротивления, действующих в ШУ.
Задачей, на решение которой направлен заявляемый способ, является контроль запаса движущего момента в ШУ крупногабаритных механических устройств космических аппаратов над моментами сопротивления на всем угле раскрытия (в любой точке раскрытия) с повышенной точностью, независимо от габаритов раскрываемых элементов конструкции механического устройства, а также автономное измерение моментов сопротивления, действующего в ШУ.
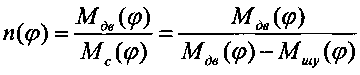
Указанная задача достигается за счет способа контроля запаса движущего момента в шарнирных устройствах крупногабаритных механических систем космических аппаратов, заключающийся в том, что для определения движущего момента шарнирного устройства (ШУ), установленного на стенде проверок, осуществляют поворот шарнирного устройства с помощью поворотной балки стенда, установленной соосно оси вращения шарнирного устройства и связанной с измерительным устройством. Движущий момент, действующий на всем угле раскрытия шарнирного устройства Мшу(φ), определяют автономно от конструкции крупногабаритного механического устройства, при этом Мшу(φ) является разницей между движущим моментом ШУ Мдв(φ), создаваемым его штатным (например, пружинным) приводом, и моментом сопротивления Мс(φ), возникающим при раскрытии шарнирного устройства в процессе штатной эксплуатации (Мшу(φ)=Мдв(φ)-Мс(φ)), после чего расчетным путем определяют запас движущего момента в ШУ при его раскрытии n(φ) по формуле: 
Достигаемый технический результат заключается в более точном определении моментов сопротивления, действующих в шарнирных устройствах, предназначенных для раскрытия крупногабаритных конструкций любых размеров за счет минимизации влияния на измерения моментов сопротивления, факторов, не возникающих при штатной эксплуатации механических устройств космических аппарата, а также снижает трудоемкость и энергозатраты на проведение испытаний, позволяет на более ранних этапах оценить ошибки при проектировании и изготовлении ШУ до их установки в состав крупногабаритного механического устройства, кроме этого позволяет оценить запас движущего момента в ШУ крупногабаритных механических устройств космических аппаратов над моментами сопротивления.
Изобретение поясняется чертежами:
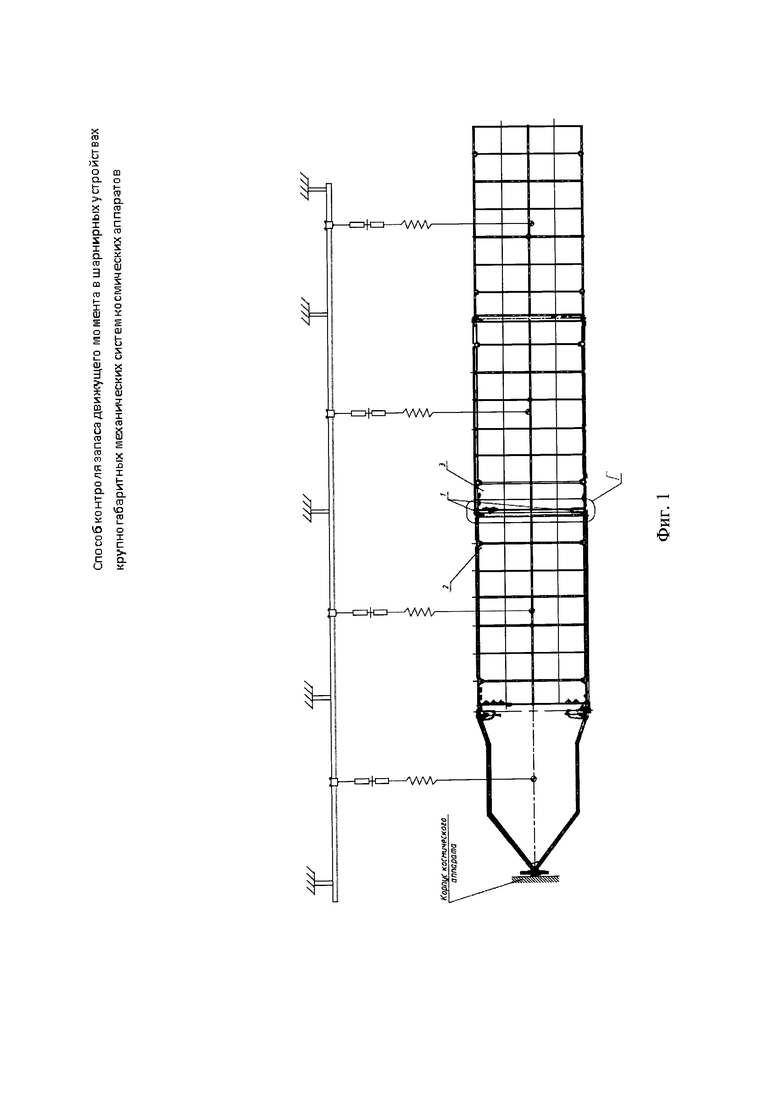
- на фиг. 1 показано крыло панелей БС, установленной на стенд обезвешивания в раскрытом положении;
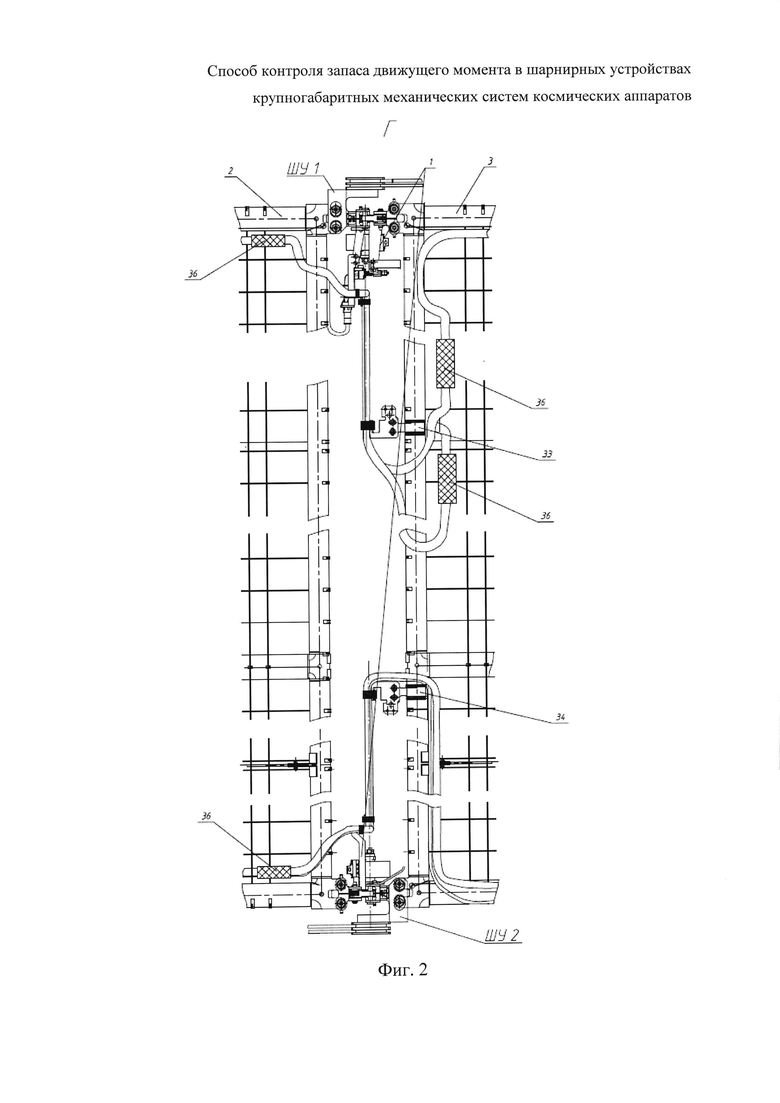
- на фиг. 2 показано установка ШУ на штатные панели БС (выносной вид Г согласно фиг. 1);
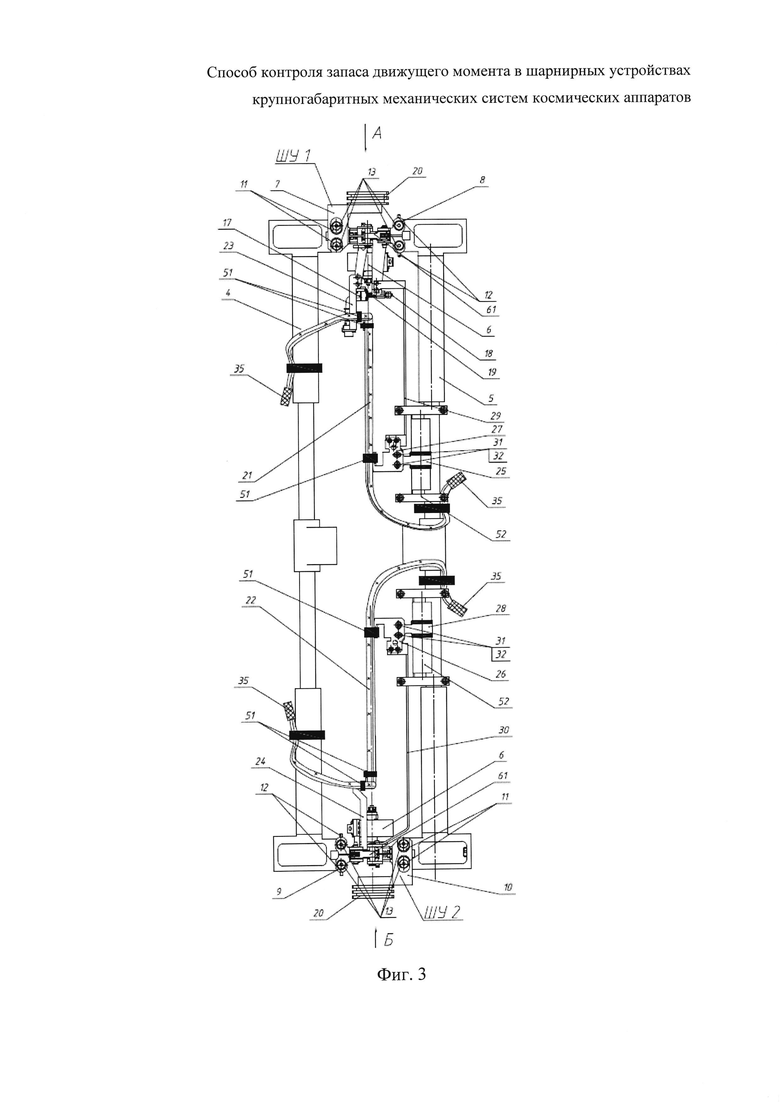
- на фиг. 3 показано автономное ШУ;
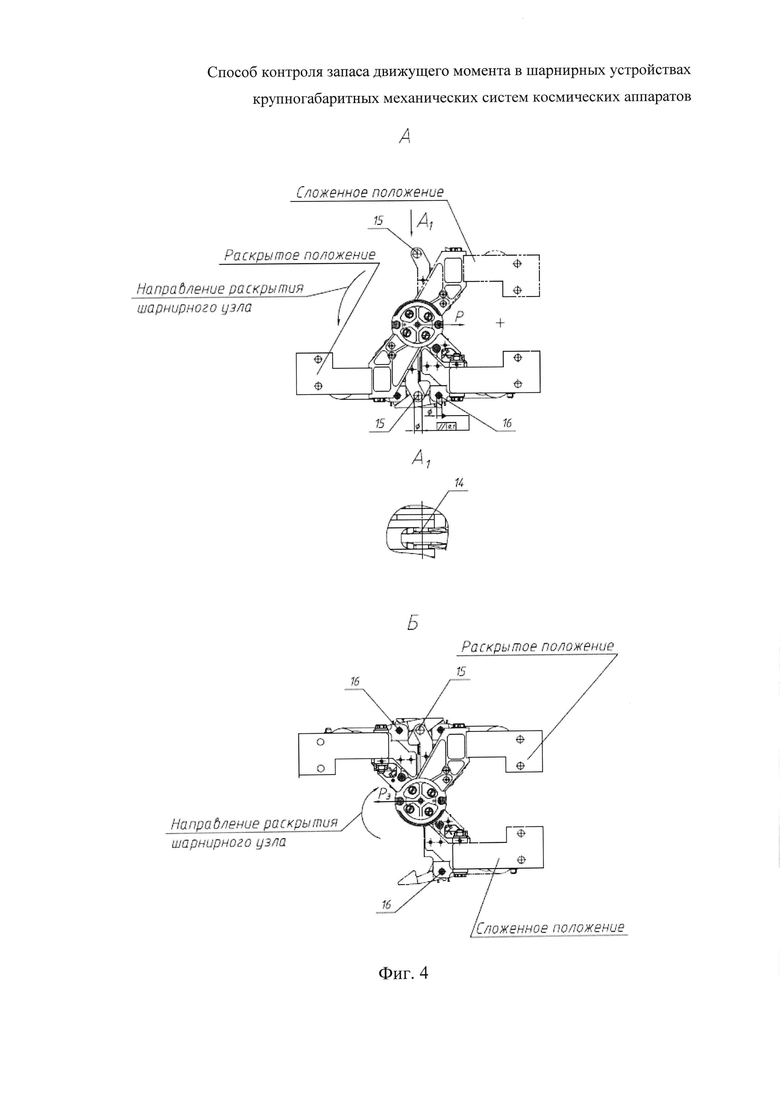
- на фиг. 4 показаны виды А и Б согласно фиг. 3;
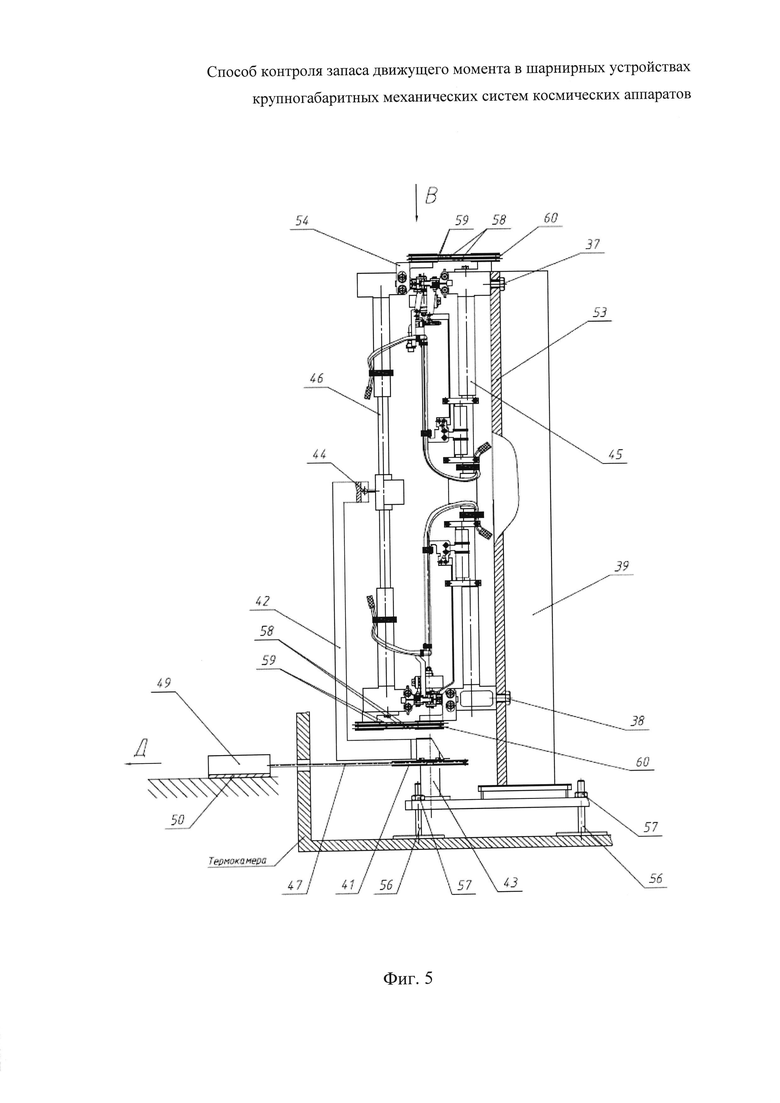
- на фиг. 5 показан стенд определения Мшу с установленным ШУ;
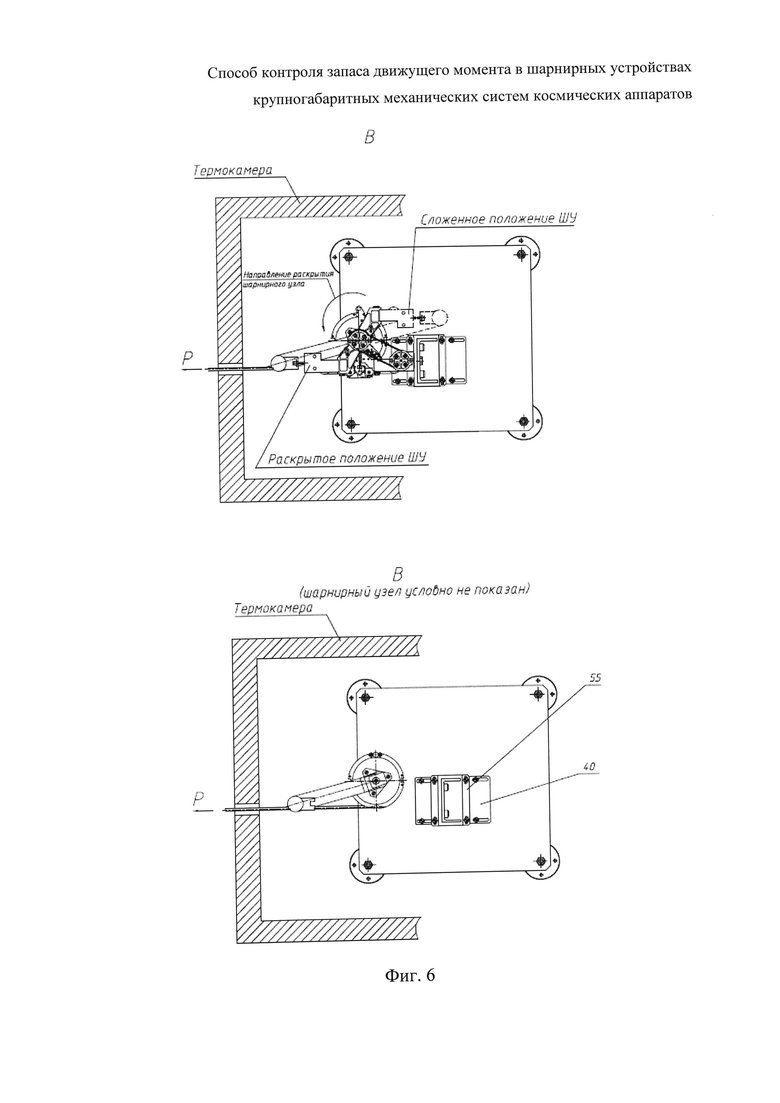
- на фиг. 6 показан вид В согласно фиг. 5.
Реализация способа контроля запаса движущего момента в шарнирных устройствах крупногабаритных механических систем космических аппаратов заключается в двух основных аспектах:
- автономности изготовления ШУ, как объекта испытаний;
- способе испытаний ШУ при помощи устройства (стенда), обеспечивающего измерение момента ШУ Мшу, действующего при его раскрытии.
Рассмотрим задачу определения запаса движущего момента в ШУ Мшу, а вместе с ним и момента сопротивления, возникающего в ШУ Мс при его раскрытии, на примере ШУ, устанавливаемого в крыло панелей МУ БС космического аппарата. Крыло панелей МУ БС, установленное на систему обезвешивания, показано на фиг. 1, ШУ 1, входящее в состав крыла и соединяющее две смежно расположенные панели 2, 3, представлено на фиг. 2.
Автономность ШУ обеспечивается за счет сборки ШУ со всеми входящими в состав ШУ элементами, создающими сопротивления при его раскрытии штатным (например, пружинным) приводом, такими как участки кабеля, проходящего транзитом через ШУ (предназначены для передачи на космический аппарат электрической энергии, сгенерированной фотопреобразователями, установленными на раскрываемых элементах конструкции механического устройства и передачи сигналов телеметрии на блок управления космического аппарата), датчики телеметрического контроля раскрытого положения ШУ и нажимное устройство для датчика, узлы зачековки ШУ, элементы синхронизации, предназначенные для синхронного раскрытия составных частей механического устройства, а также элементы задержки раскрытия составных частей механических устройств, предназначенных для обеспечения логики раскрытия механического устройства в целом. Сложенное и раскрытое положение ШУ, а также направление его раскрытия представлено на фиг. 4.
Сборка ШУ осуществляется на имитаторах штатных раскрываемых элементов крупногабаритной конструкции механического устройства (далее имитатор), которые по массе в десятки раз меньшей, чем масса штатных элементов, но при этом имеющие посадочные места и поверхности аналогичные штатным, поэтому дополнительными сопротивлениями, действующими на ШУ, за счет массы подвижного имитатора можно пренебречь. Определяемое значение Мшу(φ) можно записать в виде:

- Мшу(φ) - момент, определяемый в процессе раскрытия ШУ (например, датчиком крутящего момента или динамометром);
- Мдв(φ) - момент штатного привода раскрытия ШУ (например, пружина), значение моментов которого (силовая диаграмма) в функции от угла известно заранее, определяется при изготовлении привода;
- Мс(φ) - момент сопротивления в действующий в ШУ;
- φ - угол раскрытия шарнирного устройства.
При известном значении Мшу(φ) имеется возможность определить Мс(φ) по формуле (1):

Зная значение Мс(φ) определяем запас движущего момента в ШУ n(φ) на всем угле раскрытия ШУ, а также в любой точке раскрытия ШУ:

На фиг. 3 представлено автономное ШУ. ШУ условно разделено на две половины ШУ1 и ШУ2. Основанием для сборки данного ШУ являются имитаторы каркасов 4, 5, которые имеют посадочные места для стыковки с ШУ, аналогичные по присоединительным и габаритным размерам посадочным местам, которые необходимы для установки ШУ на панели БС 2, 3. В составе автономного ШУ установлены пружинные привода 6, непосредственно предназначенные для раскрытия ШУ, пружины взведены на определенную величину момента, определяемую моментным ключом при их взведении, данный момент является движущим моментом, действующим в ШУ при его раскрытии - Мдв. Для гарантированной стыковки ШУ при установке на панели крыла БС 2, 3 после испытаний на имитаторах каркасов, в базовых кронштейнах ШУ 7, 8, 9, 10 в местах стыковки предусмотрены пазы. Фиксация положения базовых кронштейнов ШУ производится эксцентриками 11, а также регулировочными винтами 12. Стыковка ШУ с имитаторами каркасов 4, 5 и панелями крыла БС 2, 3 обеспечивается болтами 13. Ввиду наличия сферического подшипника 14, в оси поворота ШУ - при проведении сборки ШУ на имитаторах каркасов обеспечивается параллельность положения осей 15, 16, приведенная на фиг. 4, аналогичная параллельности положения осей 15, 16, которая обеспечивается при установке ШУ в крыло панелей МУ БС.
Кроме того, в состав автономного ШУ входят следующие конструктивные элементы, оказывающие влияния на значение Мшу при раскрытии ШУ в составе панелей крыла МУ БС:
- узел зачековки ШУ 61, предназначенный для фиксации ШУ в раскрытом положении;
- датчик телеметрического контроля 17, фиксирующий факт раскрытия шарнирного узла, при нажатии на него штока 18 посредством пружины 19;
- ролик синхронизации 20 - элемент ШУ, предназначенный для обеспечения синхронного раскрытия панелей в составе крыла панелей МУ БС.
Элементом конструкции автономного ШУ, оказывающим существенное влияние на значение Мшу, является участок кабельной сети 21, 22, проходящий транзитом через ШУ (кабельная сеть осуществляет передачу телеметрического сигнала и электрического напряжения на блок управления космического аппарата). Данный участок монтируется в ШУ с помощью нитяных бандажей 51, пропитанных клеем, которые формируют ее конфигурацию, обеспечивая соосность участка кабеля и оси ШУ (кабель работает на скрутку вокруг собственной оси), данная конфигурация кабеля приводит к наименьшим потерям движущего момента Мдв при раскрытии ШУ из сложенного положения в раскрытое. Излишние участки кабеля 21, 22, монтируемого в состав автономного ШУ, подвязываются технологически к имитаторам каркасов, участки кабеля заканчиваются конструктивными элементами 35, подлежащими сращиванию обжимными сростками 35, 36 с участками кабельной сети, проложенными вдоль панелей в составе крыла МУ БС. Кронштейны 23, 24, 26, 27 предназначены непосредственно для формирования участка кабеля необходимой длины, кронштейны 29, 30 - технологически предназначенные для сохранения конфигурации кабеля при проведении перестановки ШУ с имитаторов каркасов 4, 5 на штатные панели 2, 3, после установки ШУ на панели крыла МУ БС - кронштейны 29, 30 подлежат демонтажу. В процессе перестановки ШУ с имитаторов каркасов, кронштейны 26, 27 посредством крепежных элементов 31, 32 отстыковываются от кронштейнов 25, 28 и устанавливаются на кронштейны 33, 34, аналогичные по конструкции кронштейнам 25, 28, что обеспечивает неизменяемость конфигурации участка кабеля, проходящего в ШУ от конфигурации участка кабеля, имевшей место при монтаже кабеля в автономном ШУ. Кронштейны 25, 28 установлены на элементы 52, которые закреплены к имитаторам каркасов 4, 5 таким образом, что имеют возможность регулировки положения в горизонтальном направлении, для имитации положения кронштейнов 33, 34, установленных на панелях крыла МУ БС, т.е. конструкция имитатора каркаса универсальна и не зависит от конфигурации панелей МУ БС.
На фиг. 5 представлен стенд 53 для определения Мшу, действующего в ШУ при его раскрытии совместно с установленным на его неподвижную балку 39 посредством крепежных элементов 37, 38 ШУ 54, предназначенным для проведения испытаний. ШУ 54 крепится к стенду 35 через неподвижный имитатор каркаса 45. Неподвижная балка 39 посредством пазов, выполненных в ее основании 55, а также пазов, выполненных в основании плиты 40, имеет возможность регулировки положения оси испытываемого ШУ, для обеспечения соосности с осью ролика 41, установленного и закрепленного соосно с поворотной балкой 42, при этом механизм вращения 43 поворотной балки 42 снабжен подшипником для минимизации сопротивлений при развороте поворотной балки 42 в процессе проведения испытаний. Горизонтальность выставки стенда 53 обеспечивается вращением опор 56 с последующей фиксацией их положения гайками 57. Момент сопротивления, возникающий при испытаниях при развороте поворотной балки Мст, определяется заранее при аттестации стенда, зачастую это достаточно малая величина, не оказывающая существенное влияние на результат испытаний, которой можно пренебречь. Имитация воздействия на раскрытие ШУ нагрузок, приходящих от системы синхронизации, заключается в установке на ролик 20 тяги 59, снабженной пружинами 58 и закрепленной на технологическом ролике 60. Пружины 58 обеспечивают заданное значение нагрузки. Поворотная балка 42 посредством штыря 44 соединена с подвижным имитатором каркаса 46. Поворотная балка 42 через ролик 41 и тягу 47, закрепленную на ролике 41, соединена с динамометром 49, установленным на подвижной каретке 50. Каретка обеспечивает удержание ШУ в сложенном положении и за счет своей подвижности имеет возможность перемещаться в направлении Д с определенным шагом, отпуская тем самым ШУ и давая ему посредством пружинных приводов 6 возможность раскрытия. Линейное перемещение подвижной каретки 50 согласовано с угловым разворотом ШУ таким образом, что контроль моментов Мшу, действующих в ШУ, можно определять с шагом раскрытия ШУ до 1º. Измеренное динамометром 49 значение силы за счет заранее известного радиуса ролика 41 пересчитывается в значение момента Мшу. При этом необходимо отметить, что масса подвижного имитатора ШУ мала (около 0,1 кг) и не требует обезвешивания.
В связи с тем что штатная эксплуатация ШУ установленных в крыло МУ БС происходит в условиях вакуума, а также может происходить в условиях пониженных до минус 110ºС и повышенных до 110ºС температур, предусмотрено размещение стенда 35 в термокамере для определения моментов, действующих в ШУ при экстремальных температурах. При этом подвижный имитатор каркаса 45, неподвижный имитатор каркаса 46, неподвижная балка стенда 39 и поворотная балка стенда 42 выполнены из одного материала - для исключения возникновения температурных деформаций при проведении испытаний. На основе результатов раннее проведенных экспериментов определено, что наличие вакуума не оказывает влияние на составные части ШУ и их работоспособность, поэтому испытания по определению движущего момента ШУ при экстремальных температурах проводятся в термокамере.
После определения действующего во время раскрытия в ШУ момента Мшу по формуле 2 определяется момент сопротивления действующий в ШУ при раскрытии Mc, а затем по формуле 3 определяется запас движущего момента в ШУ n(φ) на всем угле раскрытия ШУ.
Таким образом, предложенный способ испытания ШУ, применяемых в составе механических устройств космических аппаратов, отличается от ранее известных объектов патентования. Предложенное техническое решение позволяет на ранних этапах изготовления отследить дефекты при изготовлении ШУ, а также ошибки при проектировании и конструировании вновь создаваемых конструкций, позволяет существенно сократить энергозатраты и трудоемкость на проведение испытаний. Данный способ подходит для определения запаса движущего момента в ШУ крупногабаритных механических системах космических аппаратов над моментами сопротивления для раскрываемых объектов (например, панелей МУ БС, рефлекторов и т.д.) любых габаритных и конструктивных размеров, а также имеющих любую конфигурацию. Используя данный способ при проведениях испытаний ШУ, отсутствует влияние стендов раскрытия (в случае испытаний в составе механических устройств), что позволяет более точно определить значения запасов движущего момента ШУ и подтвердить надежность работы каждого ШУ, применяемого в составе крупногабаритных механических систем космических аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ ПРИ ЭКСТРЕМАЛЬНЫХ ТЕМПЕРАТУРАХ | 2011 |
|
RU2460983C1 |
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2394218C2 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
| СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2014 |
|
RU2567678C1 |
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2270793C2 |
| УНИФИЦИРОВАННАЯ КОСМИЧЕСКАЯ ПЛАТФОРМА МОДУЛЬНОГО ПРИНЦИПА ПОСТРОЕНИЯ | 2018 |
|
RU2684877C1 |
| ПОДВИЖНОЕ ЭЛЕКТРИЧЕСКОЕ СОЕДИНЕНИЕ ЧАСТЕЙ МЕХАНИЧЕСКИХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 2024 |
|
RU2824685C1 |
| Устройство для имитации нагрузки приводов раскрытия трансформируемых конструкций космических аппаратов | 2023 |
|
RU2801954C1 |
Изобретение относится к области машиностроения и может быть использовано для определения запаса движущего момента в шарнирных устройствах (ШУ) космических летательных аппаратов над моментами сопротивления как в нормальных условиях, так и при экстремальных температурах. Реализация заявляемого способа достигается за счет автономного от конструкции крупногабаритного механического устройства определения момента ШУ, действующего на всем угле раскрытия шарнирного устройства. Автономность шарнирного устройства обеспечивается за счет сборки ШУ со всеми входящими в состав ШУ элементами, создающими дополнительные сопротивления при его раскрытии штатным, например пружинным приводом, такие как участки кабеля, проходящего транзитом через ШУ (предназначены для передачи на космический аппарат электрической энергии, сгенерированной фотопреобразователями, установленными на раскрываемых элементах конструкции механического устройства и передачи сигналов телеметрии на блок управления космического аппарата), датчики телеметрического контроля, узлы зачековки ШУ, узлы, предназначенные для синхронного раскрытия отдельных элементов механического устройства, а также для задержки раскрытия отдельных элементов шарнирного устройства, обеспечивая логику раскрытия механического устройства в целом. Сборка ШУ осуществляется на имитаторах штатных раскрываемых элементов крупногабаритной конструкции механического устройства, которые по массе в десятки раз меньше, чем масса штатных элементов, но при этом имеют посадочные места и поверхности, аналогичные штатным, поэтому дополнительными сопротивлениями, действующими на шарнирное устройство, за счет массы подвижного имитатора можно пренебречь. После определения значения момента ШУ имеется возможность определения запаса движущего момента в ШУ по формуле. Технический результат заключается в повышении точности определения моментов сопротивления, действующих в ШУ. 6 ил. 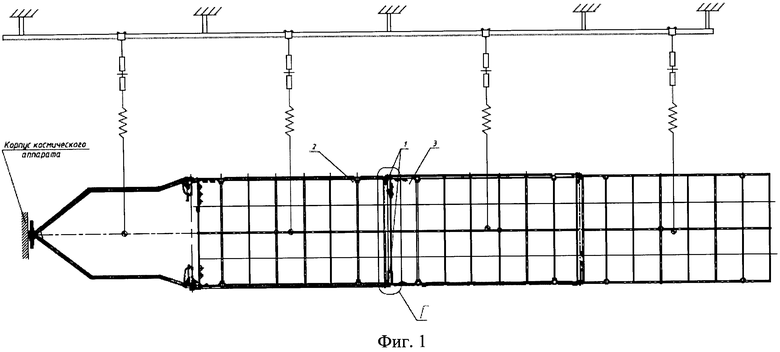
Способ контроля запаса движущего момента в шарнирных устройствах крупногабаритных механических систем космических аппаратов, заключающийся в том, что для определения движущего момента шарнирного устройства (ШУ), установленного на стенде проверок, осуществляют поворот шарнирного устройства с помощью поворотной балки стенда, установленной соосно оси вращения шарнирного устройства и связанной с измерительным устройством, отличающийся тем, что движущий момент, действующий на всем угле раскрытия шарнирного устройства Mшу(φ), определяют автономно от конструкции крупногабаритного механического устройства, при этом Mшу(φ) является разницей между движущим моментом ШУ Mдв(φ), создаваемым его штатным, например пружинным, приводом, и моментом сопротивления Mс(φ), возникающим при раскрытии шарнирного устройства в процессе штатной эксплуатации (Mшу(φ)=Mдв(φ)-Mс(φ)), после чего расчетным путем определяют запас движущего момента в ШУ при его раскрытии n(φ) по формуле: 
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ ПРИ ЭКСТРЕМАЛЬНЫХ ТЕМПЕРАТУРАХ | 2011 |
|
RU2460983C1 |
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2394218C2 |
| Стенд для испытания карданного шарнира | 1985 |
|
SU1315851A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 1992 |
|
RU2037800C1 |

