Изобретение относится к области машиностроения, в частности к спутникостроению, для определения моментов сопротивления в шарнирных устройствах (ШУ) механических систем (МС) космических аппаратов (КА) при экстремальных температурах.
Известно устройство по патенту №2394218 Российской Федерации, взятое в качестве прототипа, описание которого содержит способ испытаний шарнирных устройств механических систем. Способ состоит в том, что осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, с заранее заданной минимальной скоростью в прямом и обратном направлениях и измеряют при помощи датчика результирующий крутящий момент поворотов шарнирного устройства в прямом M1(φ) и обратном М2(φ) направлениях, после чего определяют момент сопротивления шарнирного устройства повороту МC(φ) по формуле

где МCT(φ) - момент сопротивления стенда повороту φ без шарнирного устройства (оределяется заранее при аттестации стенда МCT(φ)=1/2(М2(φ)без ШУ - М1(φ)без ШУ), Нм;
φ - угол раскрытия шарнирного устройства (стенда при аттестации, град).
Следует отметить, что данный способ испытаний прекрасно работает при нормальных условиях (НУ), то есть при нормальной температуре окружающей среды (в цифрах это +23±5°С) и нормальном атмосферном давлении (760 мм рт.ст.). Однако проведения испытаний по определению момента сопротивления ШУ МС КА только в нормальных условиях недостаточно. В реальности КА работает в космических условиях, то есть в вакууме и в большом диапазоне температур, а именно: на солнце механические системы могут нагреваться до +100°С, а в тени, напротив, могут охлаждаться до -100°С. Поэтому необходимо проводить испытания МС КА и при указанных условиях. Такие условия испытаний создаются в термо-баро-камерах (ТБК). При этом есть одна весьма важная особенность у испытаний МС КА в ТБК, а именно-раскрытие МС можно проводить только в прямом направлении (из транспортировочного положения МС, в каком она находится при выводе КА на орбиту, в рабочее положение, в котором она должна находиться на орбите Земли при нормальной эксплуатации КА), так как при приведении МС КА в рабочее положение срабатывают замки зачековки и механическая система становится жесткой конструкцией, уже не имеющей обратного хода. Поэтому воспользоваться формулой (1) для определения момента сопротивления ШУ при экстремальных условиях невозможно. Отметим при этом, что нас прежде всего интересуют экстремальные температуры, поэтому далее мы будем вести речь именно об экстремальных температурах, точнее об измерении крутящих моментов при экстремальных температурах.
Срабатывание замков зачековки при раскрытии ШУ МС КА в НУ не является непреодолимым препятствием, так как после срабатывания замков зачековки ШУ МС в рабочем положении можно вручную освободить замки зачековки, обеспечив возможность проведения обратного хода ШУ (закрытия из рабочего положения в транспортировочное положение). Затем, имея зафиксированные системой регистрации в процессе испытаний результирующие крутящие моменты поворотов ШУ в прямом M1(φ) и обратном М2(φ) направлениях, определяют момент сопротивления шарнирного устройства повороту МC(φ) по формуле (1). Подчеркнем, что это есть момент сопротивления шарнирного устройства повороту в НУ: . Нам же необходимо иметь набор моментов сопротивления ШУ, измеренных не только в НУ, но и при экстремальных температурах, то есть, как правило, и при +100±5 °С и при -100±5 °С (реже только при -100±5 °С для некоторых конструкций ШУ МС - в зависимости от реальных условий эксплуатации).
. Нам же необходимо иметь набор моментов сопротивления ШУ, измеренных не только в НУ, но и при экстремальных температурах, то есть, как правило, и при +100±5 °С и при -100±5 °С (реже только при -100±5 °С для некоторых конструкций ШУ МС - в зависимости от реальных условий эксплуатации).
Целью данного изобретения является получение возможности определения момента сопротивления испытуемого шарнирного устройства при экстремальных температурах MC экстр(φ) через измерение крутящих моментов шарнирного устройства в прямом и обратном направлениях в НУ и в прямом направлении при экстремальных температурах.
Указанная цель достигается тем, что в способе испытаний шарнирных устройств механических систем по определению момента сопротивления шарнирного устройства повороту φ на стенде при экстремальных температурах, заключающемся в том, что осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, с заранее заданной минимальной скоростью в прямом и обратном направлениях в нормальных условиях и измеряют при помощи датчика результирующий крутящий момент поворотов шарнирного устройства в прямом М1 НУ(φ) и обратном М2 НУ(φ) направлениях в нормальных условиях, осуществляют поворот шарнирного устройства при помощи того же технологического электропривода с той же скоростью в прямом направлении при экстремальной температуре и измеряют тем же датчиком результирующий крутящий момент повороту шарнирного устройства в прямом направлении при экстремальной температуре M1 ЭКСТР (φ), после чего определяют момент сопротивления шарнирного устройства повороту при экстремальной температуре МС ЭКСТР(φ) по формуле
 ,
,
где МСТ НУ(φ) - момент сопротивления стенда повороту φ без шарнирного устройства в нормальных условиях (определяется заранее при аттестации стенда), Нм;
φ - угол раскрытия шарнирного устройства (стенда при аттестации), град.
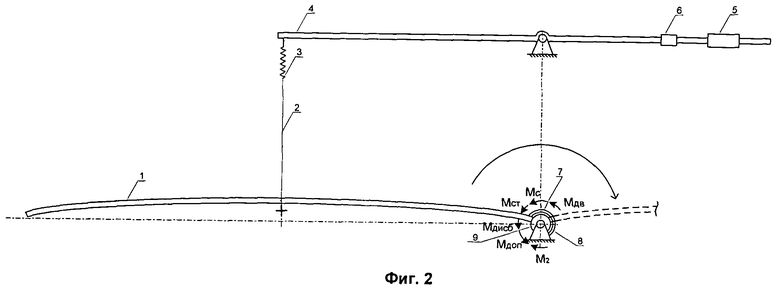
На фиг.1 представлена кинематическая схема участка стенда для раскрытия панелей БС из сложенного положения в раскрытое.
Реализация способа производится с помощью следующего устройства.
Панель 1 находится в транспортировочном положении и подвешена за центр тяжести через тросовую систему 2 и компенсационную пружину 3 к коромыслу 4, которое на другом конце имеет груз-противовес 5 и дополнительный груз 6 для преодоления дисбаланса панели БС на стенде. В испытательной схеме фиг.1 для измерения моментов, действующих в ШУ, раскрываемая панель удерживается технологическим электроприводом 7 через датчик крутящего момента 8, ось выходного вала которого соосна оси ШУ. Дополнительно в стенде содержится датчик угла поворота 9, однозначно связанный с ШУ панели БС. Для исключения влияния динамической и аэродинамической составляющих угловая скорость заранее задается достаточно малой.
При раскрытии панели БС из транспортировочного положения в раскрытое (показано неполным пунктиром) датчик крутящего момента 8 определит момент прямого хода в функции от угла с помощью датчика угла поворота 9, а при закрытии - панелимомент обратного хода также в функции от угла.
Итак, раскрываемая панель БС с помощью технологического привода переводится из начального положения в конечное и из конечного положения в начальное. Составим уравнение моментов для случая прямого хода в НУ (см. фиг.1)

где M1 НУ(φ) - момент, зарегистрированный датчиком момента при переводе панели БС из начального положения в конечное в НУ, Нм;
МДВ НУ(φ) - момент движущий, создаваемый приводом ШУ в НУ, Нм;
МДОП НУ(φ) - момент, создаваемый дополнительным грузом в НУ, Нм;
МДИСБ НУ(φ) - момент дисбаланса панелей БС на стенде раскрытия в НУ, Нм;
МС НУ(φ) - момент сопротивления ШУ в НУ, Нм;
МСТ НУ(φ) - момент сопротивления стенда без панелей БС (определяется заранее при аттестации стенда с весовыми грузами-имитаторами панелей БС) в НУ, Нм;
φ - угол раскрытия панели БС (стенда при аттестации), град.
Составим уравнение моментов для случая обратного хода в НУ (см фиг.2)

где М2 НУ(φ) - момент, зарегистрированный датчиком момента при переводе панели БС из конечного положения в начальное, Нм.
Сложим уравнение (2) и уравнение (3)


Составим также уравнение моментов для случая прямого хода при экстремальной температуре (см. фиг.1)

где M1 ЭКСТР(φ) - момент, зарегистрированный датчиком момента 8 при переводе панели БС из начального положения в конечное при экстремальной температуре, Нм;
МДВ ЭКСТР(φ) - момент движущий, создаваемый приводом ШУ при экстремальной температуре, Нм;
МДОП ЭКСТР(φ) - момент, создаваемый дополнительным грузом при экстремальной температуре, Нм;
МДИСБ ЭКСТР(φ) - момент дисбаланса панелей БС на стенде раскрытия при экстремальной температуре, Нм;
МС ЭКСТР(φ) - момент сопротивления ШУ при экстремальной температуре, Нм;
МСТ ЭКСТР(φ) - момент сопротивления стенда без панелей БС (определяется заранее при аттестации стенда с весовыми грузами-имитаторами панелей БС) при экстремальной температуре, Нм;
φ - угол раскрытия панели БС, град.
Преобразуем это уравнение

Далее сделаем следующие допущения:
1. MДВ НУ≈МДВ ЭКСТР(φ). Это допущение может быть принято по следующим обстоятельствам. Проверяемые нами механические системы с шарнирными устройствами в космосе работают при экстремальных температурах и в широком диапазоне (от +100°С на солнце до -100°С в тени), в том числе и при температурах нормальных условий. В связи с этим «штатные» приводы ШУ разрабатываются и изготавливаются именно для случаев работы в широком диапазоне температур таким образом, чтобы его движущий момент был постоянным в этом разбросе температур. Если привод ШУ не отвечает такому условию, то он непригоден. Для этого, например, при изготовлении пружинных приводов применяют специальные материалы, придумывают различные сложные конструкции.
2. МДОП НУ (φ)≈МДОП ЭКСТР (φ). Это допущение может быть принято без существенной погрешности даже со знаком «=», так как разница здесь определяется только изменениями линейных размеров стенда при изменении температур, то есть фактически коэффициентом линейного расширения материала стенда (алюминий), что для перепадов температуры ±100°С составляет не более ±0,25%.
3. МДИСБ НУ(φ)≈ МДИСБ ЭКСТР(φ). Это допущение определяется в основном изменением жесткости конструкции испытуемой МС (например, пакета панелей БС) в поперечном направлении (смотри описание прототипа) при изменении температур в диапазоне ±100°С, которое весьма мало в связи с опять-таки тем, что для изготовления конструкции МС применяются материалы с близкими значениями коэффициентов линейного расширения и специальными конструктивными решениями для компенсации температурных деформаций в элементах МС (например, пакета панелей БС). Полагаем также, что это изменение жесткости не превышает десятых долей процента.
4. МСТ НУ(φ)≈МСТ ЭКСТР(φ). Это допущение объясняется тем, что шарнирные узлы самого стенда подогреваются до температуры нормальных условий, (то есть шарнирные узлы стенда всегда находятся в нормальных температурных условиях, влияния температурных деформаций конструкции стенда на шарнирные узлы исключаются конструкцией стенда), и соответственно его момент сопротивления не меняется.
Теперь, после принятия допущений 1, 2, 3, 4, подставим их в формулу (5) с учетом формулы (4) и получим:

Таким образом, в результирующем уравнении (6) видно, что для определения момента сопротивления в ШУ МС при экстремальной температуре МС ЭКСТР(φ) надо измерить результирующий момент в ШУ при движении из начального положения в конечное M1 НУ(φ) в НУ, результирующий момент в обратном направлении М2 НУ(φ) в НУ, затем надо измерить результирующий момент в ШУ при движении из начального положения в конечное M1 ЭКСТР(φ) при экстремальной температуре, а так же воспользоваться известной (определенной заранее перед испытаниями) величиной момента сопротивления стенда МСТ НУ(φ).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2394218C2 |
| СПОСОБ КОНТРОЛЯ ЗАПАСА ДВИЖУЩЕГО МОМЕНТА В ШАРНИРНЫХ УСТРОЙСТВАХ КРУПНОГАБАРИТНЫХ МЕХАНИЧЕСКИХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ НАД МОМЕНТАМИ СОПРОТИВЛЕНИЯ | 2014 |
|
RU2586445C1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2270793C2 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНО-ТЕОРЕТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ФРИКЦИОННЫХ ХАРАКТЕРИСТИК ПАРЫ ТРЕНИЯ ДЛЯ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2411496C2 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ ЦИЛИНДРИЧЕСКИХ ОБРАЗЦОВ НА КРУЧЕНИЕ | 2008 |
|
RU2379649C2 |
| УСТРОЙСТВО ИНДИКАЦИИ РАСПРЕДЕЛЕНИЯ ВОЗДУШНЫХ ПОТОКОВ РЕГУЛЯТОРОМ РАСХОДА ВОЗДУХА ГАЗОДИНАМИЧЕСКОГО ТИПА | 2021 |
|
RU2757893C1 |
| СПОСОБ ВЫБОРА ПРИВОДА ДЛЯ ПОВОРОТА КОНСТРУКЦИИ В ШАРНИРНОМ УЗЛЕ | 2000 |
|
RU2198387C2 |
| Устройство электромеханической связи между подвижными элементами конструкции | 2018 |
|
RU2686595C1 |
| ПОМОЛЬНО-СМЕСИТЕЛЬНЫЙ АГРЕГАТ | 2008 |
|
RU2381837C2 |
Изобретение относится к измерительной технике и может быть использовано для определения моментов сопротивления в шарнирных устройствах механических систем космических аппаратов при экстремальных температурах. При реализации способа вначале осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, с заранее заданной минимальной скоростью в прямом и обратном направлениях в нормальных условиях и измеряют при помощи датчика результирующий крутящий момент поворотов шарнирного устройства в прямом и обратном направлениях. Далее осуществляют поворот шарнирного устройства при помощи технологического электропривода с той же скоростью в прямом направлении при экстремальной температуре и измеряют датчиком результирующий крутящий момент повороту шарнирного устройства в прямом направлении при экстремальной температуре, после чего определяют момент сопротивления шарнирного устройства повороту при экстремальной температуре по формуле. Технический результат заключается в возможности определения момента сопротивления испытуемого шарнирного устройства при экстремальных температурах. 2 ил.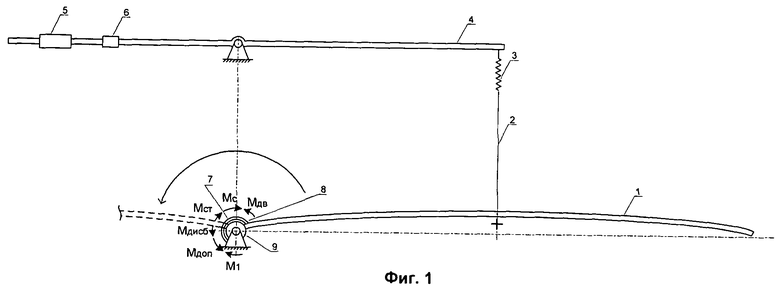
Способ испытаний шарнирных устройств механических систем по определению момента сопротивления шарнирного устройства повороту φ на стенде при экстремальных температурах, заключающийся в том, что осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, с заранее заданной минимальной скоростью в прямом и обратном направлениях в нормальных условиях и измеряют при помощи датчика результирующий крутящий момент поворотов шарнирного устройства в прямом  и обратном
и обратном  направлениях в нормальных условиях, отличающийся тем, что осуществляют поворот шарнирного устройства при помощи технологического электропривода с той же скоростью в прямом направлении при экстремальной температуре и измеряют датчиком результирующий крутящий момент повороту шарнирного устройства в прямом направлении при экстремальной температуре
направлениях в нормальных условиях, отличающийся тем, что осуществляют поворот шарнирного устройства при помощи технологического электропривода с той же скоростью в прямом направлении при экстремальной температуре и измеряют датчиком результирующий крутящий момент повороту шарнирного устройства в прямом направлении при экстремальной температуре  , после чего определяют момент сопротивления шарнирного устройства повороту при экстремальной температуре
, после чего определяют момент сопротивления шарнирного устройства повороту при экстремальной температуре  по формуле:
по формуле:
, где
 - момент сопротивления стенда повороту φ без шарнирного устройства в нормальных условиях (определяется заранее при аттестации стенда),
- момент сопротивления стенда повороту φ без шарнирного устройства в нормальных условиях (определяется заранее при аттестации стенда),
φ - угол раскрытия шарнирного устройства (стенда при аттестации).
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ | 2008 |
|
RU2394218C2 |
| Стенд для испытания карданного шарнира | 1985 |
|
SU1315851A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 1992 |
|
RU2037800C1 |
| ПАТЕЙТНО- -in ТЕ.ХНЙЧЕСилЯ БИБЛИОТЕКА | 0 |
|
SU266308A1 |
| Стенд для испытания карданных передач | 1988 |
|
SU1508121A1 |
| СПОСОБ ВЫБОРА ПРИВОДА ДЛЯ ПОВОРОТА КОНСТРУКЦИИ В ШАРНИРНОМ УЗЛЕ | 2000 |
|
RU2198387C2 |
| Стенд для испытания резинометаллических шарниров гусеничной цепи | 1980 |
|
SU901880A1 |

