Изобретение относится к области машиностроения, в частности к спутникостроению, для определения моментов сопротивления в шарнирных устройствах (ШУ) механических систем (МС) космических аппаратов (КА).
Известно устройство по а.с. SU 1315851, взятое в качестве прототипа, описание которого содержит способ испытаний шарнира. Способ состоит в том, что с целью приближения условий испытаний к эксплуатационным производится дополнительное нагружение испытуемого шарнира циклическим крутящим моментом. Необходимые измерения крутящего момента в шарнирах и частоты вращения производятся с помощью тензодатчика, токосъемника и преобразователя частоты вращения привода. Следует отметить, что крутящий момент здесь измеряется косвенно по закручиванию участка полого вала с помощью деформации тензодатчика, установленного на этом участке полого вала. Результат измерения во многом зависит от материала полого вала (от сочетания его упругости и пластичности), типа и чувствительности тензодатчика, способа и точности его установки и компенсации (или отсутствии таковой) температурной погрешности. Понятно, что косвенные методы измерения всегда проигрывают прямым методам измерения по точности, например, прямо измерять крутящий момент с помощью датчика крутящего момента много точнее. Поэтому одним из недостатков данного устройства является невысокая точность измерений крутящих моментов. Кроме того, крутящий момент здесь измеряется в функции времени, а не от угла поворота, так как отсутствует датчик угла поворота вала привода.
Целью данного изобретения является определение с высокой точностью момента сопротивления испытуемого шарнирного устройства, установленного на специальном стенде, в функции от угла поворота шарнирного устройства через измерение крутящих моментов и углов поворота шарнирного устройства.
Для надежного раскрытия МС КА на орбите, например, панели солнечных батарей (БС), необходимо на этапе наземной экспериментальной отработки, а также при проверке качества изготовления летной продукции подтвердить надежность работы каждого ШУ МС.
ШУ МС КА представляет собой механизм, состоящий из подвижных элементов различных систем, таких как: собственно подшипниковый узел; проходящий через его подвижные части участок кабеля, сформированный определенным образом; защелки для фиксации подвижных частей между собой в одном или нескольких положениях; спусковой механизм, приводящий в движение другие механизмы при определенном положении подвижных частей подшипникового узла; элементы системы, синхронизирующей движение ШУ с одним или несколькими другими ШУ; датчики положения подвижных частей ШУ; также в состав ШУ входит привод, например спиральная пружина, создающая вращающий момент в сторону раскрытия, или устройство, передающее момент от привода, установленного в другом ШУ; другие элементы систем. При функционировании ШУ его составные части - элементы различных систем - взаимодействуют друг с другом, создавая суммарный момент сопротивления Мс движущему моменту от привода.
Определить фактическое значение Мс для простых механизмов, массы элементов которых не создают значительных реакций в ШУ, не представляет большого труда. В них Мс в функции угла поворота φ можно определить, непосредственно измеряя момент при раскрытии ШУ из транспортировочного положения в рабочее положение (прямой ход) с помощью датчика крутящего момента с соответствующей усилительной и регистрирующей аппаратурой. Проблема состоит в том, что, во-первых, как правило, ШУ не является автономным механизмом, а установлено в раскрываемой конструкции. Поэтому для того чтобы испытать ШУ, нужно раскрывать элементы конструкций и при этом учитывать их особенности, такие как большие габариты, массы, деформации конструкций под действием гравитационных сил и др. Для испытаний на раскрытие крупногабаритных конструкций применяются различные стенды, уменьшающие влияние веса элементов конструкции на моменты в ШУ. Во-вторых, из-за дисбаланса пространственных конструкций на стенде (который только теоретически можно сделать равным нулю, а на практике он всегда присутствует) приходится на стенд устанавливать дополнительные грузы для преодоления дисбаланса, чтобы стенд не останавливался в процессе раскрытия. В-третьих, сам дисбаланс имеет сложную и наперед труднопредсказуемую функцию значений момента дисбаланса от угла поворота, поэтому как-то определить с достаточной степенью точности и затем вычесть дисбаланс из суммарного момента, измеряемого датчиком крутящего момента, не представляется возможным.
Рассмотрим задачу определения Mc в ШУ на примере панелей БС. Все перечисленные выше элементы различных систем, находящиеся в ШУ, монтируются и настраиваются в составе конструкций панелей БС, имеющих большие габариты и массы по сравнению с ШУ. В испытательной схеме на стенде раскрытия необходимо учитывать и компенсировать влияние массы, жесткости и габаритов конструкций БС, а также неизбежные технологические погрешности компенсации этих влияний на измеряемые величины.
На стенде раскрытия обезвешивание осуществлено следующим образом: с помощью коромысла и балансировочных грузов через подвесы к панели БС приложены силы, равные по величине и противоположные по направлению силе тяжести и не создающие момент относительно центра тяжести панели БС на всем угле раскрытия ШУ. Такая настройка испытательной схемы достигается путем предварительной балансировки панели БС до начала сборки панелей БС с ШУ в единую конструкцию, при этом достигается безразличное равновесие коромысла с подвешенной панелью БС при его любом угловом положении, а также безразличное положение подвешенной панели БС при ее любом угловом положении. Тем не менее, в результате балансировки неизбежно имеют место нескомпенсированные технологические погрешности (НТП), то есть уже упомянутый Мдисб. Источники Мдисб для рассматриваемой испытательной схемы следующие: отклонение положения оси ШУ БС от вертикальной плоскости, проходящей через ось поворота коромысла; погрешность суммарной величины сил, компенсирующих вес, приложенных к панели БС; погрешность настройки положения точек приложения сил к панели БС, которая приводит к возникновению момента относительно центра тяжести панели, а значит, и в ШУ, и другие источники. Неповторяющееся сочетание нескомпенсированных технологических погрешностей, формирующееся на этапе предварительной балансировки, а затем при каждой сборке и настройке испытательной схемы, приводит к возникновению момента дисбаланса в испытательной схеме Мдисб, который изменяется при изменении угла раскрытия панели БС и который в большинстве случаев сравним по величине с Мс или даже превышает его. Поэтому при определении Mc необходимо исключить Мдисб.
Сказанное относительно сложности определения дисбаланса некоторым образом проиллюстрировано на фиг.1, где панель БС показана в профиль в искривленном состоянии под действием ее собственной силы тяжести. Так оно и есть на самом деле, только реальное искривление панели БС менее заметно глазу. Видно, что в горизонтальном положении панели БС реальный центр массы сместился от точек захвата панели БС вниз (показано крестиком). Если это смещение равно Δ, тогда дисбаланс от прогиба в этом положении панели Мдисб=Δ·Gпан, где Gпан - вес панели. Причем очевидно, что в вертикальном положении панели БС величина Δ станет равна нулю, так как продольная жесткость панели БС намного выше поперечной. Очевидно также, что при дальнейшем повороте панели дисбаланс сменит свой знак и будет действовать в противоположном направлении, так как панель БС прогнется уже в другую сторону. Это означает, что сделать дисбаланс нулевым не удастся принципиально и что этот дисбаланс сильно зависит от поперечной жесткости панели БС или любой другой МС.
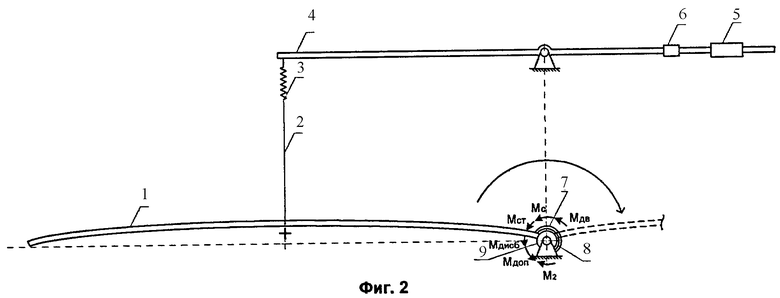
На фиг.1 представлена кинематическая схема участка стенда для раскрытия панелей БС из сложенного положения в раскрытое. Панель 1 находится в транспортировочном положении и подвешена за центр тяжести через тросовую систему 2 и компенсационную пружину 3 к коромыслу 4, которое на другом конце имеет груз-противовес 5 и дополнительный груз 6 для преодоления дисбаланса панели БС на стенде. В испытательной схеме фиг.1 для измерения моментов, действующих в ШУ, раскрываемая панель удерживается технологическим электроприводом 7 через датчик крутящего момента 8, ось выходного вала которого соосна оси ШУ. Дополнительно в стенде содержится датчик угла поворота 9, однозначно связанный с ШУ панели БС. Для исключения влияния динамической и аэродинамической составляющих угловая скорость заранее задается достаточно малой.
При раскрытии панели БС из транспортировочного положения в раскрытое (показано неполным пунктиром) датчик крутящего момента 8 определит момент прямого хода в функции от угла с помощью датчика угла поворота 9, а при закрытии панели - момент обратного хода также в функции от угла.
Итак, для определения Мс в ШУ раскрывающаяся панель БС с помощью технологического привода переводится из начального положения в конечное и из конечного положения в начальное. Составим уравнение моментов для случая прямого хода (см. фиг.1):

где М1(φ) - момент, зарегистрированный датчиком момента при переводе панели БС из начального положения в конечное;
Мдв(φ) - момент движущий, создаваемый приводом ШУ;
Мдоп(φ) - момент, создаваемый дополнительным грузом;
Мдисб(φ) - момент дисбаланса панелей БС на стенде раскрытия;
Мс(φ) - момент сопротивления ШУ;
Мст(φ) - момент сопротивления стенда без панелей БС (определяется заранее при аттестации стенда с весовыми грузами-имитаторами панелей БС);
φ - угол раскрытия панели БС (стенда при аттестации).
Составим уравнение моментов для случая обратного хода (см фиг.2):

где М2(φ) - момент, зарегистрированный датчиком момента при переводе панели БС из конечного положения в начальное.
Вычтем из уравнения (2) уравнение (1):
М2(φ)-М1(φ)=2Мс(φ)+2Мст(φ)

Таким образом, в результирующем уравнении (3) видно, что для определения момента сопротивления в ШУ МС БС достаточно измерить результирующий момент в ШУ при движении из начального положения в конечное и результирующий момент в обратном направлении, а также воспользоваться известной (определенной заранее перед испытаниями) величиной момента сопротивления стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ШАРНИРНЫХ УСТРОЙСТВ МЕХАНИЧЕСКИХ СИСТЕМ ПРИ ЭКСТРЕМАЛЬНЫХ ТЕМПЕРАТУРАХ | 2011 |
|
RU2460983C1 |
| СПОСОБ КОНТРОЛЯ ЗАПАСА ДВИЖУЩЕГО МОМЕНТА В ШАРНИРНЫХ УСТРОЙСТВАХ КРУПНОГАБАРИТНЫХ МЕХАНИЧЕСКИХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ НАД МОМЕНТАМИ СОПРОТИВЛЕНИЯ | 2014 |
|
RU2586445C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2010 |
|
RU2468969C2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2270793C2 |
| СТЕНД ДЛЯ РАСКРЫТИЯ БАТАРЕИ СОЛНЕЧНОЙ | 2014 |
|
RU2567678C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ТЕСТИРОВАНИЯ ФУНКЦИОНИРОВАНИЯ ВРАЩАЮЩИХСЯ МАШИН | 1999 |
|
RU2229135C2 |
| СПОСОБ ИСПЫТАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ НА ИЗГИБ С КРУЧЕНИЕМ ПРИ СТАТИЧЕСКОМ И КРАТКОВРЕМЕННОМ ДИНАМИЧЕСКОМ ВОЗДЕЙСТВИИ | 2015 |
|
RU2578662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОЩНОСТИ МЕХАНИЧЕСКИХ ПОТЕРЬ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2454643C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
Изобретение относится к измерительной технике и может быть использовано для определения моментов сопротивления в шарнирных устройствах механических систем космических аппаратов. При реализации способа осуществляют поворот шарнирного устройства при помощи технологического электропривода в прямом направлении и измеряют при помощи датчика результирующий крутящий момент повороту шарнирного устройства в прямом направлении M1(φ), а затем осуществляют поворот шарнирного устройства в обратном направлении и измеряют результирующий крутящий момент повороту шарнирного устройства в обратном направлении М2(φ), после чего определяют момент сопротивления шарнирного устройства повороту Мс(φ) по формуле. Технический результат заключается в повышении точности измерений. 2 ил.
Способ испытаний шарнирных устройств механических систем по определению момента сопротивления шарнирного устройства повороту φ на стенде, заключающийся в том, что осуществляют поворот шарнирного устройства при помощи технологического электропривода, установленного соосно оси шарнирного устройства, отличающийся тем, что осуществляют поворот с заранее заданной минимальной скоростью в прямом направлении и измеряют при помощи датчика результирующий крутящий момент повороту шарнирного устройства в прямом направлении M1((φ), а затем осуществляют поворот шарнирного устройства при помощи того же технологического электропривода с той же скоростью в обратном направлении и измеряют тем же датчиком результирующий крутящий момент повороту шарнирного устройства в обратном направлении М2(φ), после чего определяют момент сопротивления шарнирного устройства повороту Мс(φ) по формуле

где Мст(φ) - момент сопротивления стенда повороту φ без шарнирного устройства (определяется заранее при аттестации стенда);
φ - угол раскрытия шарнирного устройства (стенда при аттестации).
| Стенд для испытания карданного шарнира | 1985 |
|
SU1315851A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 1992 |
|
RU2037800C1 |
| ПАТЕЙТНО- -in ТЕ.ХНЙЧЕСилЯ БИБЛИОТЕКА | 0 |
|
SU266308A1 |
| Стенд для испытания карданных передач | 1988 |
|
SU1508121A1 |
| СПОСОБ ВЫБОРА ПРИВОДА ДЛЯ ПОВОРОТА КОНСТРУКЦИИ В ШАРНИРНОМ УЗЛЕ | 2000 |
|
RU2198387C2 |
| Стенд для испытания резинометаллических шарниров гусеничной цепи | 1980 |
|
SU901880A1 |

