Изобретение относится к лазерной технике и может быть использовано для имитации стрельбы, например, в условиях симуляции реального боя с участием солдат, в том числе и действующих на боевой технике.
Известен способ лазерной имитации стрельбы, реализованный системой MILES-2000 (Комплексная лазерная система имитации боя, США, интернет: http://ak-inzt.net/forces/140-miles2000), которая представляет собой лазерный излучатель, устанавливаемый на стволе оружия каждого участника боя, и несколько фотоприемников, устанавливаемых на форме солдат, их экипировке и на применяющейся боевой технике, а также GPS-определитель координат и автономный блок питания. Все приемники соединяются с блоком памяти, который сохраняет все данные о действиях обучаемого.
Оружие заряжают холостыми боеприпасами - так имитируется реальность каждого выстрела. При выстреле лазерный излучатель производит короткую кодированную лазерную посылку, несущую в себе информацию о типе оружия, из которого осуществлен выстрел, и координатах местоположения стрелка.
При попадании лазерного луча в фотоприемник происходит идентифицирование стрелка, сделавшего выстрел. С GPS-определителя координат считывается информация о текущем положении солдата, в которого произведен выстрел, и сравнивается с координатами стрелявшего - таким образом определяют расстояние выстрела. По силе засветки лучом лазера фотоприемника оценивают точность попадания - прямое попадание означает "убит", касательное - "ранен". Если в тренировке используются разные виды оружия, то при попадании учитывают также поражающее воздействие каждого из них.
Недостатки представленного способа следующие:
1. Так как расходимость лазерного излучения обычно мала (менее 10-4 радиан), то при попадании в цель с расстояния 50 м на противнике формируется лазерный пучок диаметром 20-30 мм, а при выстреле с 10 км - формируется лазерный пучок диаметром более 1 м, что неудобно и требует применения большого количества фотоприемников.
2. Определение точности попадания по мощности лазерного излучения недостаточно достоверно и в имитационных условиях боя неприменимо из-за наличия оптических помех (запыленность, туман и т.п.) и возможного разворота фотоприемника от нормали к лазерному осветителю.
Из уровня техники известен способ формирования информационного поля лазерной системы телеориентации [Патент РФ №2080615, МПК: G01S 1/70], в котором описан принцип кодировки и формирования лазерного информационного поля. При этом в сторону управляемого объекта направляют систему вертикальных и горизонтальных полос определенной угловой величины, при этом каждую из вертикальных и горизонтальных полос формируют за счет двух тактов сканирования лазерного пучка в одном направлении и одного встречного прохода. С помощью фотоприемника формируют тройку импульсов, по которым видно, что временной интервал между первым и вторым импульсами постоянный и служит кодировкой координаты, а временной интервал между вторым и третьим импульсами изменяется в зависимости от отклонения фотоприемника от центра информационного поля. При известном расстоянии до объекта, когда известны линейные размеры информационного поля, можно с высокой точностью определить положение объекта относительно центра информационного поля независимо от расстояния до этого объекта. Данный способ позволяет решить проблему расходимости лазерного излучения. Так как в условиях имитации стрельбы расстояние до объекта неизвестно, то линейный размер информационного поля на объекте поражения (цели) будет зависеть от расстояния до него.
Применение данного изобретения напрямую для имитации стрельбы невозможно, так как с увеличением расстояния до объекта поражения увеличивается размер информационного поля, что приводит к изменению пеленгационной функции и ошибке в измерении расстояния от центра информационного поля до фотоприемника на объекте.
В качестве прототипа выбран способ имитации стрельбы [Патент РФ №1828223, МПК: F41G 3/26], заключающийся в формировании имитирующего выстрел лазерного излучения, приеме и регистрации излучения и по интенсивности принятого сигнала определения степени поражения имитируемой цели. При этом с целью повышения точности имитации при стрельбе на различных дальностях до имитируемой цели, изменяют интенсивность излучения лазерного луча в вертикальном сечении. В данном изобретении точность определения поражения цели невысока из-за неудобства и сложности вычислений, обусловленных расходимостью лазерного излучения. Кроме этого определение точки попадания в цель по интенсивности излучения лазерного луча может быть затруднено при возможном наличии оптических помех на пути распространения лазерного излучения.
Технический результат заявляемого способа лазерной имитации стрельбы направлен на повышение точности имитации при стрельбе на различных дальностях до имитируемой цели с возможностью определения точки попадания в нее с высокой точностью (до нескольких сантиметров) независимо от расходимости лазерного излучения и наличия оптических помех на пути распространения лазерного излучения (пыль, туман и т.п.).
Технический результат заявляемого способа лазерной имитации стрельбы достигается тем, что формируют имитирующее выстрел лазерное излучение, осуществляют его прием и регистрацию с последующим определением степени поражения имитируемой цели. В момент выстрела осуществляют кратковременное формирование лазерного информационного поля, состоящего из системы вертикальных и горизонтальных полос одной угловой величины, при этом каждую из вертикальных и горизонтальных полос формируют за счет двух тактов сканирования лазерного пучка в одном направлении и одного такта сканирования во встречном. Центр лазерного информационного поля настраивают соосно со стволом оружия, а его положение относительно имитируемой цели (точку попадания) определяют с помощью трех фотоприемников, установленных на ней с расположением по вершинам треугольника со сторонами известной величины. Каждый из фотоприемников формирует сигналы в виде троек импульсов, при этом по интервалу времени между первым и вторым импульсами определяют измеряемую координату фотоприемника в лазерном информационном поле, а по интервалу времени между вторым и третьим импульсами - отклонение фотоприемника от его центра. Затем производят корректировку пеленгационной характеристики, для чего используют любую пару из трех находящихся в плоскости лазерного информационного поля фотоприемников, по тройкам импульсов которых измеряют расстояние между ними и вводят корректирующий коэффициент k. После этого принимают решение о степени повреждения имитируемой цели или промахе.
Сущность способа лазерной имитации стрельбы состоит в том, что формируют имитирующее выстрел лазерное излучение, осуществляют его прием и регистрацию, после чего определяют степень поражения имитируемой цели. Лазерное излучение формируют в виде лазерного информационного поля, для чего используют сканирующую систему и объектив (осуществление развертки). Для определения степени поражения имитируемой цели применяют кодировку центра лазерного информационного поля за счет использования трех фотоприемников.
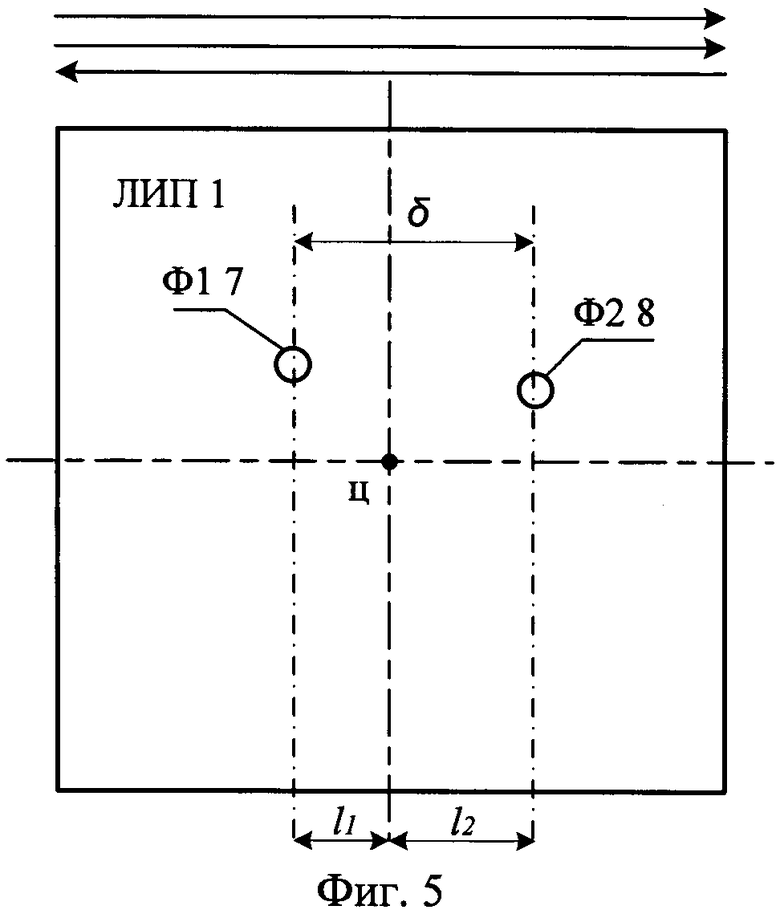
На фиг. 1 представлена структурная схема устройства, реализующего способ лазерной имитации стрельбы.
В момент выстрела осуществляют кратковременное формирование лазерного информационного поля (ЛИП) 1, для чего используют лазерный излучатель (ЛИ) 2, сканирующую систему (СС) 3 и объектив (О) 4, установленные на стволе оружия (СО) 5. Для имитации реальности выстрела (звука выстрела) оружие заряжают холостыми патронами. Излученный ЛИ 2 лазерный пучок поступает в СС 3, которая посредством его сканирования формирует ЛИП 1, несущее в себе информацию о типе оружия, из которого осуществлен выстрел. При этом максимальную расходимость лазерного излучения в зависимости от дальности стрельбы используемого оружия настраивают с помощью объектива 4 - чем больше дальность стрельбы, тем меньше должна быть максимальная расходимость (например, для танка с дальностью стрельбы около 10 км максимальная расходимость должна быть меньше, чем для автомата с дальностью стрельбы около 1 км). ЛИП 1 состоит из вертикальных и горизонтальных полос одной угловой величины, каждую из которых формируют за счет двух тактов сканирования лазерного пучка в одном направлении и одного такта сканирования во встречном.
Центр ЛИП 1 настраивают соосно со стволом оружия 5, при этом его положение относительно имитируемой цели (ИЦ) 6 (точку попадания) определяют с помощью трех фотоприемников - первого (Ф1) 7, второго (Ф2) 8 и третьего (Ф3) 9, установленных на ней с расположением по вершинам треугольника со сторонами известной величины. Каждый из фотоприемников формирует сигналы в виде троек импульсов, по которым находят положение соответствующего фотоприемника в ЛИП 1. Для этого по интервалу времени между первым и вторым импульсами определяют измеряемую координату (X или Y) фотоприемника в ЛИП 1, а по интервалу времени между вторым и третьим импульсами - отклонение фотоприемника от центра ЛИП 1 (по величине координаты).
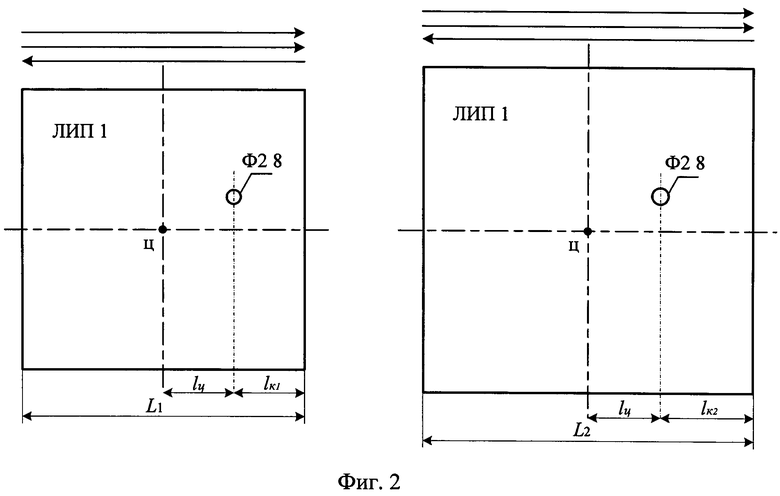
На фиг. 2 показано положение одного (любого) из трех расположенных на ИЦ 6 фотоприемников, например Ф2 8, относительно центра ЛИП 1 при изменении расстояния от СО 5 (от стрелка) до ИЦ 6 (увеличении ЛИП 1 с размера L1 до размера L2) для одной координаты (в данном случае для координаты X). При этом тремя стрелками сверху показаны направления сканирования лазерного пучка, lц - расстояние от центра ЛИП 1 до фотоприемника, lк1 - расстояние от фотоприемника до края ЛИП 1 размером L1 (слева), lк2 - расстояние от фотоприемника до края ЛИП 1 размером L2 (справа).
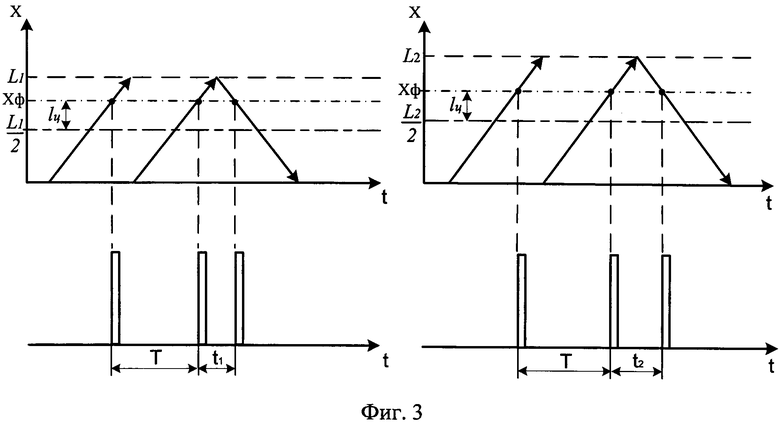
На фиг. 3 представлено изменение формирования троек импульсов фотоприемника при изменении расстояния от СО 5 до ИЦ 6 в соответствии с увеличением ЛИП 1, показанным на фиг. 2, при этом точка Xф соответствует положению фотоприемника в ЛИП 1.
Из фиг. 2, 3 видно, что при изменении размеров ЛИП 1 изменяется пеленгационная характеристика (линейная функция, связывающая реальное и измеренное отклонение фотоприемника от центра ЛИП 1). Это приводит к изменению расстояния от фотоприемника до края ЛИП 1 - с lк1 до lк2, при этом расстояние lц от центра ЛИП 1 до фотоприемника не меняется. В связи с чем, при проведении третьего такта сканирования лазерного пучка изменяется положение третьего детектированного импульса. Расстояние между первой парой импульсов не меняется, так как первые два последовательных сканирования происходят в одном направлении.
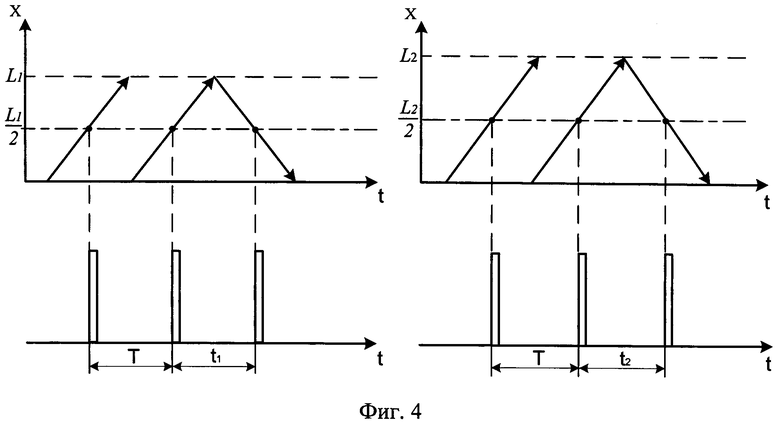
Как видно из диаграмм на фиг. 4 при точном совпадении фотоприемника с центром ЛИП 1 независимо от его размера:
T=t1=t2,
где Т - время между первым и вторым импульсами;
t1 - время между вторым и третьим импульсами на диаграмме слева;
t2 - время между вторым и третьим импульсами на диаграмме справа.
Для определения точного расстояния от центра ЛИП 1 до каждого из фотоприемников выполняют корректировку пеленгационной характеристики (компенсируют зависимость пеленгационной характеристики от расстояния между СО 5 (стрелком) и ИЦ 6), для чего используют любую пару из трех фотоприемников, находящихся в плоскости ЛИП 1 на известном расстоянии между ними δ.
На фиг. 5 представлено ЛИП 1, в плоскости которого расположены два фотоприемника, например Ф1 7 и Ф2 8, используемых для корректировки пеленгационной характеристики.
Корректировка пеленгационной характеристики по одной координате, например по координате X, выглядит следующим образом.
По тройкам импульсов измеряют расстояние между фотоприемниками:
 ,
,
где δизм - измеряемое расстояние между Ф1 7 и Ф2 8;
l1 и l2 - расстояния от центра ЛИП 1 до Ф1 7 и Ф2 8 соответственно.
При этом l1 и l2 определяют исходя из расположений соответствующих фотоприемников в ЛИП 1, определенных по временным интервалам между импульсами.
Так как размер ЛИП 1 меняется в зависимости от расстояния между СО 5 и ИЦ 6, то для упрощения определения точного расстояния от центра ЛИП 1 до фотоприемников при каждом выстреле выполняют преобразование размера ЛИП 1 в единый размер, удобный для расчетов (автоматическая корректировка пеленгационной характеристики в соответствии с заранее заданным значением). Для этого вводят корректирующий коэффициент k, который используют для учета разницы между измеренным расстоянием от одного фотоприемника до другого по тройкам импульсов и известным расстоянием между ними:
δ=kδизм,
где k - коэффициент, определяемый соотношением δ/δизм.
При использовании для корректировки пеленгационной характеристики Ф1 7 и Ф3 9 или Ф2 8 и Ф3 9 измеряемое расстояние δизм соответствующей пары определяют аналогично для обеих координат.
ИЦ 6 также может свободно перемещаться в пространстве, поэтому фотоприемники не обязаны постоянно находиться в плоскости ЛИП 1, а это приводит к некорректному определению положения центра ЛИП 1 относительно ИЦ 6. Так как в данном способе лазерной имитации стрельбы используют три фотоприемника, то при их отклонении от плоскости ЛИП 1 для корректного определения положения центра ЛИП 1 относительно ИЦ 6 может быть использована стандартная триангуляция с измерением угловых координат в трехмерном пространстве (например, по принципу, описанному в статье О.Е. Балашова, А.И. Степашкина, «Нашлемная система обзора и целеуказания», Вестник РГРТУ, №4 (выпуск 38), Рязань, 2011, с. 40-44, интернет: www.rsreu.ru/ru/about-university/nauch-deyatelnost/zhurnal-vestnik-rgrtu/menu-1176).
Таким образом, использование трех фотоприемников, а именно определение их положения в ЛИП 1 с последующей корректировкой пеленгационной характеристики позволяет с высокой точностью определить положение центра ЛИП 1 (точку попадания в ИЦ 6) относительно фотоприемников независимо от расходимости лазерного излучения (размера ЛИП 1), а используя принцип триангуляции, высокая точность достигается независимо от расположения фотоприемников в трехмерном пространстве. На основании этого принимают решение о степени повреждения ИЦ 6 или промахе. То есть при нахождении ИЦ 6 в пределах ЛИП 1 определяют точку попадания (например, рука, нога, грудь и т.д.), а при отсутствии - принимают решение о промахе.
Исходя из того, что фотоприемники регистрируют сканирующий лазерный луч, то независимо от условий распространения лазерного излучения, например, даже в среде с оптическими помехами (туман, пыль и т.д.), центр регистрируемого импульса лазерного излучения всегда соответствует центру лазерного пучка.
Вся информация о повреждении ИЦ 6 передается, например, на пульт управления боем или мобильный компьютер. Полученная информация может использоваться для блокировки оружия имитируемой цели 6 (если принято решение об уничтожении ИЦ 6) и т.п.
Целесообразно на ИЦ 6 установить не менее двух троек фотоприемников (например, спереди и сзади), так как она может разворачиваться в пространстве и перекрывать собой лазерное излучение. Кроме этого для уменьшения веса оружия ЛИ 2 целесообразно переместить на любую часть экипировки, а лазерное излучение подавать на СС 3 при помощи оптоволокна.
Промышленная применимость данного способа возможна, исходя из того, что все используемые операции практически реализуемы с помощью лазерной и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ лазерной имитации стрельбы при обучении стрельбе | 2024 |
|
RU2839564C1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ | 2013 |
|
RU2522057C1 |
| СПОСОБ ИМИТАЦИИ СТРЕЛЬБЫ | 1985 |
|
SU1828223A1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ И ПОРАЖЕНИЯ | 2014 |
|
RU2537872C1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ | 2010 |
|
RU2468326C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ | 2000 |
|
RU2185586C1 |
| Лазерный имитатор стрельбы | 2016 |
|
RU2635901C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2537662C1 |
| ЛАЗЕРНЫЙ ИМИТАТОР СТРЕЛЬБЫ И ПОРАЖЕНИЯ | 1986 |
|
RU2037767C1 |
Изобретение относится к лазерной технике и может быть использовано для имитации стрельбы в условиях симуляции реального боя. Достигаемый технический результат - повышение точности имитации стрельбы при различных дальностях до имитируемой цели, возможностью определения точки попадания с высокой степенью точности. Способ лазерной имитации стрельбы заключается в том, что формируют имитирующее выстрел лазерное излучение, принимают и регистрируют его. В момент выстрела осуществляют кратковременное формирование лазерного информационного поля, состоящего из системы вертикальных и горизонтальных полос одной угловой величины. Каждую из вертикальных и горизонтальных полос формируют за счет двух тактов сканирования лазерного пучка в одном направлении и одного такта сканирования во встречном. Центр лазерного информационного поля и ствол оружия настраивают соосно. Положение центра информационного поля относительно имитируемой цели определяют с помощью трех фотоприемников, установленных на ней в вершинах треугольника известной величины. Каждый из фотоприемников формирует сигналы в виде троек импульсов. По интервалу времени между ними определяют координату фотоприемника в лазерном информационном поле и отклонение фотоприемника от его центра. Производят корректировку пеленгационной характеристики, после чего принимают решение о степени повреждения имитируемой цели. 1 з.п. ф-лы, 5 ил.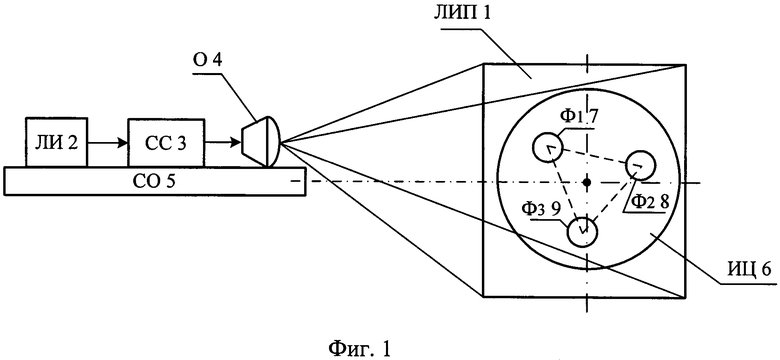
1. Способ лазерной имитации стрельбы, заключающийся в том, что формируют имитирующее выстрел лазерное излучение, осуществляют его прием и регистрацию с последующим определением степени поражения имитируемой цели, отличающийся тем, что в момент выстрела осуществляют кратковременное формирование лазерного информационного поля, состоящего из системы вертикальных и горизонтальных полос одной угловой величины, при этом каждую из вертикальных и горизонтальных полос формируют за счет двух тактов сканирования лазерного пучка в одном направлении и одного такта сканирования во встречном, причем центр лазерного информационного поля настраивают соосно со стволом оружия, а его положение относительно имитируемой цели (точку попадания) определяют с помощью трех фотоприемников, установленных на ней с расположением по вершинам треугольника со сторонами известной величины, каждый из которых формирует сигналы в виде троек импульсов, при этом по интервалу времени между первым и вторым импульсами определяют измеряемую координату фотоприемника в лазерном информационном поле, а по интервалу времени между вторым и третьим импульсами - отклонение фотоприемника от его центра, затем производят корректировку пеленгационной характеристики, для чего используют любую пару из трех находящихся в плоскости лазерного информационного поля фотоприемников, по тройкам импульсов которых измеряют расстояние между ними и вводят корректирующий коэффициент k, после чего принимают решение о степени повреждения имитируемой цели или промахе.
2. Способ лазерной имитации стрельбы по п. 1, отличающийся тем, что для корректного определения положения центра лазерного информационного поля относительно имитируемой цели при отклонении фотоприемников от плоскости лазерного информационного поля используют стандартную триангуляцию с измерением угловых координат в трехмерном пространстве.
| СПОСОБ ИМИТАЦИИ СТРЕЛЬБЫ | 1985 |
|
SU1828223A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ К ПОДЪЕМНИКАМ | 1931 |
|
SU32112A1 |
| СИСТЕМА ЛАЗЕРНОГО ИМИТАТОРА СТРЕЛЬБЫ (СЛИС) | 2006 |
|
RU2347171C2 |
| US 5213335 A1, 25.05.1993 | |||
| WO 2006134202 A1, 21.12.2006 . | |||

