Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации и навигации (далее ИП ЛСТ), оптической связи и может использоваться при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или в створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах.
Наиболее близким к заявленному техническому решению является способ и устройство формирования ИП ЛСТ (прототип), основанные на поэлементном сканировании лазерного пучка с "иглообразной" диаграммой направленности, описанный в патенте РФ №2080615. Суть изобретения-прототипа заключается в поочередном формировании поля управления объектом, состоящего из двух прямоугольных лазерных растров, образованных за счет сканирования лазерного пучка в каждом растре по N строкам и развернутых относительно друг друга на 90°, при этом формирование каждой строки в растре осуществляют за счет трех тактов сканирования и с заданными задержками между тактами, причем только два соседних такта в каждой строке имеют встречное направление сканирования и равные времена задержек для первого и второго растров. При этом на фотоприемнике, расположенном на управляемом объекте, интервал между первыми двумя импульсами определяет величину координаты ФПУ в ИП, а временной интервал между вторым и третьим импульсами - ее признак (Z или Y). Для уширения лазерного пучка в плоскости, перпендикулярной базовой строке, лазерный пучок может быть размыт.
К недостаткам данного способа стоит отнести наличие в поле управления объектом энергетических «дыр» - зон, где отсутствует лазерное поле управления, и объект не управляется. Например, при формировании поля управления (24×24)М, при расходимости лазерного излучения 0,25 мрад, при формировании 16 строк и размытии N=8, размер «дыры» в поле управления составляют размер (11,5×11,5) См и количество таких зон - 16400. При этом не учитываются эффекты увеличения размеров площади «дыр» в поле управления при отработке крена - разворот объекта, на котором стоит система формирования.
Решить проблему «дыр» в поле управления можно с помощью формирования «ножеобразной» диаграммы направленности лазерного излучения, описанной в патенте US №4111385 при условии, что, как в прототипе, формирование каждой строки в растре осуществляют за счет трех тактов сканирования и с заданными задержками между тактами.
Способу, описанному в патенте US №4111385, присуще снижение плотности лазерной энергии в информационном поле из-за того, что постоянный угловой размер световой полосы уменьшает дальность управления.
Задача, на решение которой направлено изобретение, это создать способ формирования однородного поля управления объектом без ухудшения дальности управления объектом.
Технический результат направлен на создание поля управления объектом без зон, где отсутствует лазерное поле управления объектом, с регулируемой «ножеобразной» диаграммой направленности лазерного излучения.
В предлагаемом способе технический результат достигается формированием сплошной, регулируемой по длине полосы лазерного излучения, а также формированием по определенному закону задержек между тремя тактами сканирования при крене объекта, на котором располагается система формирования поля управления.
Способ формирования информационного поля лазерной системы телеориентации поясняется Фиг.1-Фиг.3.
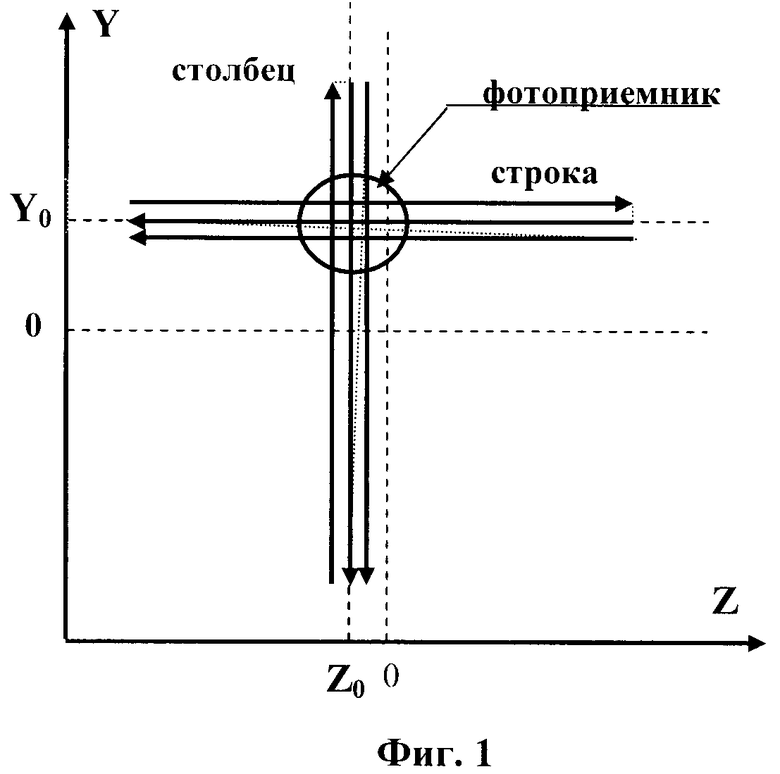
На Фиг.1 показан способ формирования информационного поля лазерной системы телеориентации, используемой в прототипе.
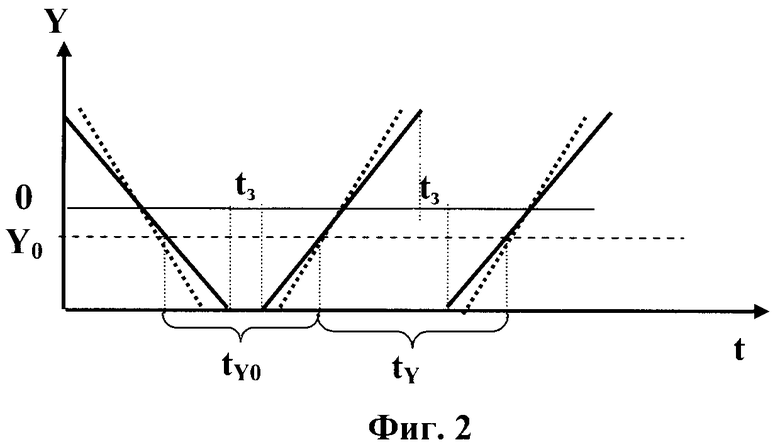
На Фиг.2 показаны временные диаграммы определения координат центра поля управления.
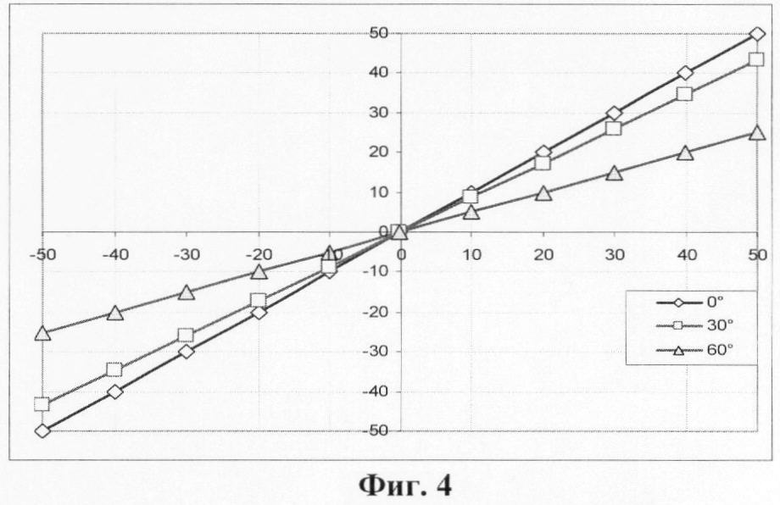
На Фиг.3 показан способ формирования информационного поля лазерной системы телеориентации с использованием «ножеобразной» диаграммы направленности лазерного излучения и появление ошибок при крене объекта, на котором располагается система формирования поля управления.
На Фиг.4 показана пеленгационная характеристика управления объектом при крене объекта, на котором располагается система формирования поля управления, без компенсации ошибки.
Способ формирования информационного поля лазерной системы телеориентации, используемой в прототипе, показан на Фиг.1, где изображены одна строка и один столбец, которые формируются за счет трех тактов сканирования и с заданными задержками между тактами, причем только два соседних такта в каждой строке имеют встречное направление сканирования.
При этом с фотоприемника поступают две тройки импульсов - от столбца и строки. Временные диаграммы формирования временных задержек в каждой из троек импульсов представлены на Фиг.2. Для столбца формируются следующие временные интервалы:
tY0 - временной интервал, соответствующий отклонению фотоприемника от центра поля управления, имеющего координату Y0;
tY - признак координаты (строка или столбец), которые задаются априорно.
При формировании поля управления (24×24) М, на расстоянии 300 М до управляемого объекта, при расходимости лазерного излучения 0,25 мрад, при формировании 16 строк и 16 столбцов, в информационном поле управления появляются «дыры» (зоны, где отсутствует лазерное излучение, и объект не управляется) размером (1,5×1,5) М, что неприемлемо.
Для устранения данного недостатка используют размытие строк и столбцов на N=8, при этом размер «дыры» в поле управления составляет (11,5×11,5) См, а количество таких зон - 16400. Используемые размеры поля могут быть больше, например (80×80) М, что ведет к необходимости увеличения числа строк до 64, что в свою очередь ведет к увеличению времени на формирование полного поля управления в 4 раза.
Авторами предлагается при сохранении алгоритма определения координат центра поля управления за счет трех тактов сканирования, как в прототипе, сформировать горизонтальную «ножеобразную» диаграмму направленности лазерного излучения строки при вертикальном сканировании и вертикальную «ножеобразную» диаграмму направленности лазерного излучения столбца при горизонтальном сканировании.
При этом осуществляют управление угловыми размерами «ножеобразной» диаграммы направленности лазерного излучения в соответствии с дистанцией до управляемого объекта, что позволяет управлять объектом на расстоянии не меньше, чем в прототипе.
Известны способы реализации управляемой «ножеобразной» диаграммы направленности лазерного излучения, основанные на применении лазерных диодов с цилиндрической линзой, развертки лазерного излучения с помощью сканеров-гальванометров или использованием цилиндрической оптики.
Все представленные методы приводят либо к большим энергетическим потерям при формировании поля на большом расстоянии, либо имеют низкую скорость отработки строки (не быстрее 2÷5 мс). Для формирования «ножеобразной» диаграммы направленности лазерного излучения авторами предлагается использовать режим линейного сканирования акустооптического дефлектора (АОД) (В.И.Балакший и др. «Физические основы акустооптики», стр.229-230), осуществляемый накачкой АОД ультразвуковой волной с линейной частотной модуляцией. Управляя величиной модуляции можно управлять величиной развертки «ножеобразной» диаграммы направленности лазерного излучения. Фактически создается аналог управляемой цилиндрической линзы с изменяющимся фокусным расстоянием. При этом сохраняется условие высокой скорости формирования растра.
Данному способу присущ недостаток, вызванный тем, что при развороте (крене) объекта, на котором установлена система формирования поля, относительно линии горизонта происходит появление ошибки определения координаты до центра поля управления, как это представлено на Фиг.3.
У прототипа, при построении растра (поля управления) из множества точек, такой проблемы нет, так как растр можно вращать с помощью управляющей программы.
При формировании «ножеобразной» диаграммы направленности с помощью АОД вращать растр невозможно, так как «ножеобразная» диаграмма направленности лазерного излучения формируется в плоскости распространения звуковой волны в АОД, которую невозможно вращать в пространстве с помощью управляющей программы.
При использовании ножеобразной диаграммы направленности лазерного излучения, в соответствии с Фиг.3 при развороте поля управления на угол α первоначальная координата фотоприемника Y0 изменяется на координату Y(α), при этом пеленгационная характеристика управления объектом по оси Y изменяется в зависимости от угла крена по следующему закону:

где Y(0) - пеленгационная характеристика при нулевом крене;
Y(α) - пеленгационная характеристика при крене, равном α.
Временной интервал между двумя измерительными тактами сканирования лазерным излучением в отсутствии крена имеет величину

где t0 - полное время одного такта сканирования без крена;
Y - координата положения фотоприемника;
Yмах - максимальные размеры формируемого лазерного растра по координате Y, имеющего диапазон значений ±Yмах;
tc - временная задержка между тактами сканирования.
Так как при развороте растра (поля управления) происходит изменение значений координат в соответствии с выражением (1), то промежуток времени между двумя измерительными тактами сканирования лазерным излучением зависит от величины крена α и имеет величину

где t(α) - временной интервал между двумя измерительными тактами сканирования при величине крена поля управления α.
Зависимости (1), (2), (3) справедливы и для координаты Z. Только при этом необходимо формировать «ножеобразную» диаграмму направленности лазерного излучения с помощью другого АОД.
На Фиг.4 приведены пеленгационные характеристики управления объектом по оси Y при крене 0°, 30° и 60°. Для надежного управления объектом необходимо производить коррекцию скорости сканирования трех тактов развертки в соответствии с изменением пеленгационной характеристики, как это показано на Фиг.2 - пунктирные линии.
Для компенсации данной ошибки необходимо произвести коррекцию времени сканирования трех информационных тактов t0, выражение (3), на величину Δt:

Тогда временное сканирование строки для каждого растра t0(α), при крене поля управления на угол α, осуществляется по формуле

Способ формирования информационного поля лазерной системы телеориентации осуществляется следующим образом. Поле управления объектом формируется поочередно двумя прямоугольными лазерными растрами, образованными за счет сканирования лазерного пучка в каждом растре одной сплошной (размытой) строкой, и развернутыми относительно друг друга на 90°.
При этом формирование строки в растре осуществляют за счет трех тактов сканирования с заданными задержками между тактами, причем только два соседних такта строки имеют встречное направление сканирования и равные времена задержек для первого и второго растров. На фотоприемнике, расположенном на управляемом объекте, интервал между первыми двумя импульсами определяет величину координаты ФПУ в ИП, а временной интервал между вторым и третьим импульсами - ее признак (Y или Z).
При этом формирование ножеобразной диаграммы направленности лазерного излучения (размытие строки) осуществляют с помощью акустооптического дефлектора, на который подают последовательность частот в заданном частотном диапазоне, с линейной частотной модуляцией. При этом время сканирования каждого из трех тактов растра (при крене растра) определяется по формуле (4). Угловые размеры ножеобразной диаграммы направленности лазерного излучения (сплошной размытой строки) определяются расстоянием до управляемого объекта и задаются частотным диапазоном на АОД.
Таким образом, предлагаемый способ формирования информационного поля лазерной системы телеориентации позволяет формировать однородное поле управления объектом без ухудшения дальности управления объектом, что достигается формированием сплошной, регулируемой по длине полосы лазерного излучения.
При этом осуществляют формирование по определенному закону задержек между тремя тактами сканирования при крене объекта, на котором располагается система формирования поля управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2013 |
|
RU2537662C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ЛАЗЕРНОЙ ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504906C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2012 |
|
RU2486543C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| Способ телеориентации движущихся объектов | 2015 |
|
RU2614333C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОСТОЯННЫХ РАЗМЕРОВ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ В ПЛОСКОСТИ УПРАВЛЯЕМОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093849C1 |
Изобретение относится к приборостроению и предназначено для формирования информационного поля лазерных систем телеориентации (ИП ЛСТ) и навигации, оптической связи, и может использоваться при управлении, посадке и стыковке летательных аппаратов, проводке судов через узости или в створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах. Технический результат направлен на создание поля управления объектом без зон, где отсутствует лазерное поле управления объектом, с регулируемой «ножеобразной» диаграммой направленности лазерного излучения. Для этого формируется сплошная, регулируемая по длине полоса лазерного излучения, а также формируется по определенному закону задержка между тремя тактами сканирования при крене объекта, на котором располагается система формирования поля управления. 4 ил.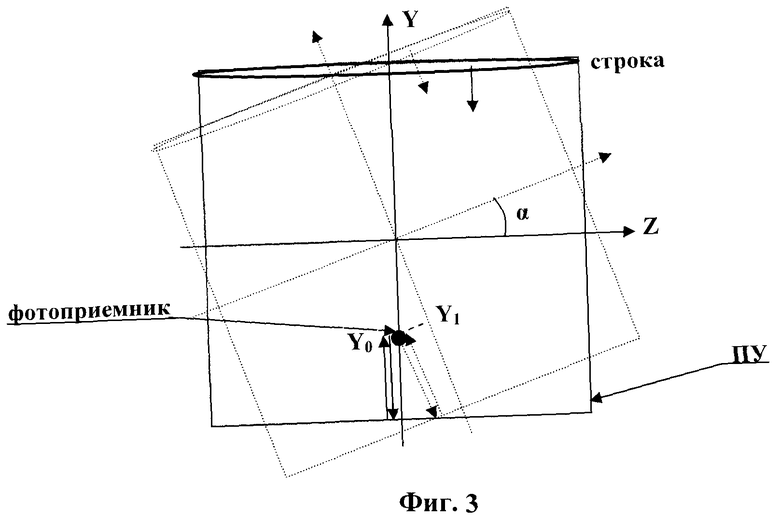
Способ формирования информационного поля лазерной системы телеориентации, заключающийся в поочередном формировании поля управления объектом двумя прямоугольными лазерными растрами, развернутыми относительно друг друга на 90°, при этом формирование строки в растре осуществляют за счет трех тактов сканирования и с заданными задержками между тактами, отличающийся тем, что только два соседних такта строки имеют встречное направление сканирования и равные времена задержек для первого и второго растров, сканирования лазерного пучка в каждом растре осуществляют одной сплошной размытой строкой, при этом размытие строки для каждой координаты осуществляют с помощью соответствующего акустооптического дефлектора, на который подается ультразвуковая волна с линейной частотной модуляцией в заданном частотном диапазоне, при развороте поля управления на угол крена α первоначальная координата фотоприемника изменяется на координату Y(α), а время сканирования строк лазерного растра для каждой координаты при крене α определяют по формуле
t0(α)=t0+(t0·Y/Ymax)·(1-cos(α)), где
t0(α) - время сканирования одного такта строки при величине крена α;
t0 - время сканирования одного такта строки растра без крена;
Ymax - максимальные размеры формируемого лазерного растра по координате Y.
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| УСТРОЙСТВО КОСВЕННОГО ИНДУКЦИОННОГО НАГРЕВА ПОРОШКОВЫХ ИЗДЕЛИЙ | 1996 |
|
RU2113939C1 |
| DE 3242871 Q1, 19.11.1982. | |||

