Изобретение относится к лазерной технике и предназначено для формирования информационного поля лазерных систем телеориентации, навигации, оптической связи и может использоваться при управлении, посадке и стыковке летательных аппаратов, корректировке траектории полета самонаводящихся снарядов и ракет, проводке судов через узости или створы мостов, дистанционном управлении робототехническими устройствами в опасных для человека зонах.
Из уровня техники известен способ формирования информационного поля лазерной системы телеориентации (Патент US N4,111,385, опубликован 16.04.1976, МПК: F42B 13/30, F41G 7/12, F41G 7/14, F41G 9/00), основанный на использовании модулирующих растров.
К недостаткам данного способа можно отнести недостаточно высокое быстродействие и низкий энергетический потенциал, что ограничивает дальность управления.
Более совершенным является способ телеориентации (Патент GB N2133652, опубликован 25.07.1984, МПК: F41G 7/00, G01S 1/70), в котором лазерный пучок совершает возвратно-поступательное сканирование, вначале по одной координате с дискретным переходом по ортогональной координате после завершения каждого возвратно-поступательного движения лазерного пучка, а затем, после заполнения прямоугольного растра, направление сканирования меняют на ортогональное. Выделение координат управляемого объекта в информационном поле лазерной системы телеориентации основано на зависимости от этих координат длительности временного интервала между двумя соседними принимаемыми лазерными сигналами, возникающими при возвратно-поступательном сканировании лазерного пучка.
Данный способ требует дополнительных затрат времени при формировании кадра информационного поля из двух взаимно перпендикулярных растров, поскольку между тактами возвратно-поступательного сканирования лазерного пучка по строкам введены временные задержки признака координат, превышающие рабочее время.
Следует отметить также низкую помехозащищенность этого способа от случайных помеховых импульсов, которые могут попасть в большие интервалы между выделяемыми импульсами координат, что приводит к сбоям в определении координат управляемого объекта и его возможному срыву с необходимой траектории.
Наиболее близким к заявляемому техническому решению является способ формирования информационного поля лазерной системы телеориентации (Патент RU №2080615, опубликовано 27.05.1997, МПК: G01S 1/70), который выбран в качестве прототипа. Способ основан на поочередном формировании двух прямоугольных лазерных растров размерами L×L, образованных путем сканирования лазерного пучка в каждом растре по N строкам и развернутых вокруг общего центра друг относительно друга на 90°. Особенностью способа является формирование строк в растре циклами по М строк в цикле, с дискретными переходами лазерного пучка между соседними строками цикла на величину L/M. Каждую строку формируют за счет не менее трех тактов сканирования, со временем сканирования такта Тс и заданными задержками между тактами, причем только два соседних такта в каждой строке имеют встречное направление сканирования и равные времена задержек для первого и второго растров. По данному способу объект управления получает информацию о своем пространственном положении в виде двух ортогональных координат относительно центра двух последовательно формируемых лазерным пучком растров, образующих кадр. При прямом сканировании, реверсировании сканирования и дублировании последнего лазерный пучок проходит трижды по одной строке, а затем его сдвигают на шаг цикла (L/M) и повторяют операции по этой строке. Далее формируют следующий цикл, смещая сканирование лазерного пучка на ширину строки относительно первой строки предыдущего цикла, до заполнения растра. Объект управления, находящийся где-либо в пределах информационного поля, при прохождении по нему лазерного луча регистрирует, в результате, по крайней мере, по три импульса в каждом растре. При этом интервал между первым и вторым импульсами зависит от удаления фотоприемного устройства объекта от начала строки, а интервал между вторым и третьим импульсами, независим от положения объекта, что служит признаком передаваемой координаты.
Принадлежность «троек» к соответствующему растру по координатам Х и Y зафиксирована различными значениями временного интервала между вторым тактом сканирования (реверс лазерного пучка) и третьим тактом - дублированием реверса.
Но данный способ имеет ряд недостатков, снижающих его функциональную надежность - это необходимость выбора компромисса между: расходимостью луча лазерного излучения, частотой обновления информации, характеристиками самого объекта управления и т.д., как правило, не позволяет добиться равномерного распределения энергетического потенциала в поле.
Неравномерность энергетических потенциалов в растре приводит к появлению в поле управления объектом энергетических «дыр» - зон, где отсутствует лазерное поле управления, и объект не управляется. Особенно нежелательна ситуация, когда объект управления попадает в энергетическую «дыру» в течение нескольких растров подряд. Т.е. плотность распределения пропусков, в определении координат, концентрируется в нескольких зонах по дистанции. В этом случае минимальная частота обновления информации о координатах может не обеспечиваться, что приводит к сбоям в управлении объекта и возможному его срыву.
Технический результат изобретения направлен на повышение надежности управления объектом в системах телеориентации, за счет уменьшения величины плотности распределения пропусков по дистанции.
Технический результат достигается тем, что способ телеориентации движущихся объектов включает последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения. Причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают, равным протяженности растра, отнесенной к числу строк в цикле. При этом данный способ телеориентации движущихся объектов отличается от прототипа тем, что осуществляют смещение информационного поля на величину m в направлении, исключающем искажения в информации, принимаемой объектом управления, в каждом необходимом растре.
Причем величина m выбирается исходя из размеров энергетических «дыр» информационного поля, расходимости лазерного пучка, размера формируемого растра и количества строк в растре.
Сущность изобретения поясняется рисунками (Фиг.1 - Фиг.4).
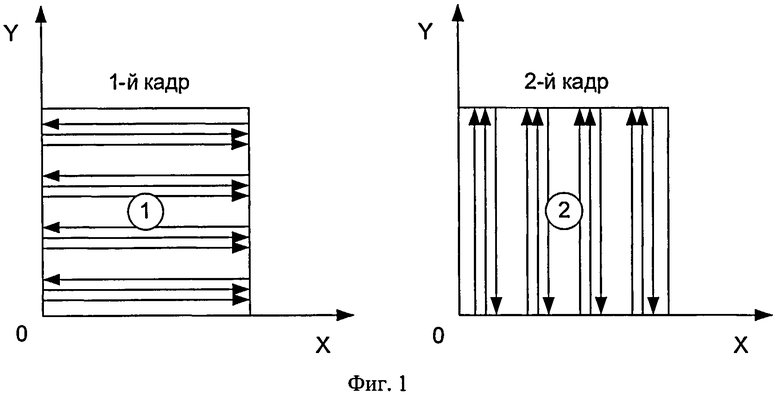
На Фиг.1 представлена траектория движения лазерного пучка при формировании первого и второго растров без смещения.
На Фиг.2 представлена диаграмма распределения энергетических потенциалов в растре при формировании первого и второго растров без смещения.
На Фиг.3 представлена траектория движения лазерного пучка при формировании третьего и четвертого растров со смещением на величину m в направлении, перпендикулярном оси сканирования в текущем растре, т.е. направлении, исключающем искажение передаваемой информации.
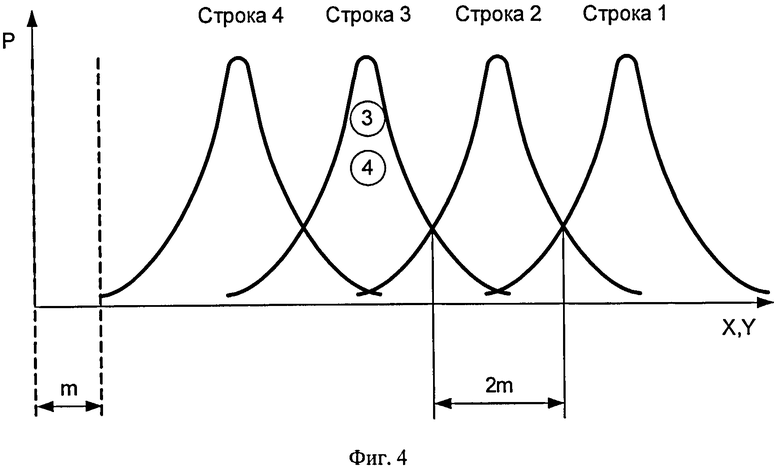
На Фиг.4 представлена диаграмма распределения энергетических потенциалов в растре при формировании третьего и четвертого растров, со смещением на величину m.
Рассмотрим пример осуществления предлагаемого способа телеориентации движущихся объектов. Суть данного способа заключается в осуществлении поочередного смещения информационного поля в направлениях, не искажающих передаваемую информацию.
Допустим, что в начальный момент времени формирование первого и второго растров производится без смещения (Фиг.1). Объект управления находится в точках 1 и 2 информационного поля (Фиг.2). При таком положении объект управления попадает в энергетическую «дыру» в информационном поле (Фиг.2) и не получает передаваемую на него информацию. Последующие два растра формируются со смещением на величину m, в направлении, перпендикулярном оси сканирования в текущем растре, то есть направлении, исключающем искажение передаваемой информации (Фиг.3). Объект управления находится уже в точках 3 и 4 информационного поля (Фиг.4). При таком положении объект управления не попадает в энергетическую «дыру» информационного поля (Фиг.4) и получает передаваемую на него информацию. Далее цикл смещения информационного поля повторяется. Если величину m принять, например, кратной величине, равной половине расстояния между соседними энергетическими «дырами» в информационном поле, то исключается ситуация, при которой объект управления может находиться в энергетической «дыре» информационного поля в течение нескольких растров подряд и не воспринимать передаваемую на него информацию.
Предлагаемый способ телеориентации движущихся объектов уменьшает величину плотности распределения пропусков по дистанции, что повышает надежность управления объектом. При этом скорость передачи информации сохраняется, и отсутствует необходимость доработки системы выделения координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ телеориентации движущихся объектов | 2015 |
|
RU2614333C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2012 |
|
RU2486543C1 |
| СПОСОБ ТЕЛЕОРИЕНТАЦИИ | 1997 |
|
RU2117311C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2011 |
|
RU2477866C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
| СПОСОБ ЛАЗЕРНОЙ ТЕЛЕОРИЕНТАЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504906C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО РАСТРА | 2013 |
|
RU2532504C1 |


Изобретение относится к лазерной технике и может использоваться при управлении, посадке и стыковке летательных аппаратов, корректировке траектории полета самонаводящихся снарядов и ракет, проводке судов, дистанционном управлении робототехническими устройствами в опасных для человека зонах. Достигаемый технический результат - повышение надежности управления объекта в системах телеориентации. Указанный результат достигается тем, что способ телеориентации движущихся объектов включает последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле. При этом осуществляют смещение информационного поля на величину m в направлении, исключающем искажения в информации, принимаемой объектом управления, в каждом необходимом растре. Величина m выбирается исходя из размеров энергетических «дыр» информационного поля, расходимости лазерного пучка, размера формируемого растра и количества строк в растре. 4 ил.
Способ телеориентации движущихся объектов, осуществляемый с помощью информационного поля, включающий последовательное формирование двух прямоугольных ортогональных растров построчным, прямым и встречным реверсивным сканированием лазерного пучка с дублированием реверсивного сканирования, между которыми выдерживают в каждой строке заданные временные задержки при гашении излучения, причем строки пошагово сблокированы в циклы, которые поочередно смещают на ширину строки, а шаг выбирают равным протяженности растра, отнесенной к числу строк в цикле, отличающийся тем, что в направлении, перпендикулярном оси сканирования в текущем растре, исключающем искажение передаваемой информации, принимаемой объектом управления, осуществляют смещение информационного поля на величину m, которую выбирают исходя из размеров энергетических «дыр» информационного поля, расходимости лазерного пучка, размера формируемого растра и количества строк в растре, с обеспечением исключения попадания объекта управления в энергетическую «дыру».
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2080615C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ | 2008 |
|
RU2383896C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| US 4111385 A, 05.09.1978 | |||
| US 5574479 A, 12.11.1996 | |||
| WO 1986007162 A, 04.12.1986 | |||
| WO 1985001575 A, 11.04.1985 | |||

