Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи данных по каналам связи. Его использование позволяет повысить достоверность передачи информации без введения структурной избыточности в передаваемые сообщения, обнаруживать возникающие при передаче ошибки как одиночные, так и кратные, повысить скорость передачи информации.
Это достигается путем замены традиционного позиционного представления двоичных слов, представляющих собой результаты 2n-разрядных слов-измерений x, на эквивалентное их отображение образами-остатками bi, полученными в результате выполнения операций, эквивалентных делению x на определенным образом выбранные модули сравнения mi. В результате этого обеспечивается выполнение требований тождественного равенства x и bi (фиг.1):

Наиболее близким к предлагаемому является способ дискретной передачи информации ([1], патент RU №2434301 от 20.11.2011, бюл. №32). В нем также в результате структурно-алгоритмических преобразований (САП), предшествующих передаче информации, формируют последовательность слов-измерений (сообщений), называемых «выборками первичных сигналов», которые преобразуют в выборки с меньшей разрядностью представления исходных значений. Сформированные выборки с меньшей разрядностью представления исходных значений являются эквивалентами образов-остатков bi. Таким образом, способ [1] представляет собой инженерную интерпретацию математической модели (1).
Он заключается в том, что на передающей стороне формируют первичный сигнал, шкала значений которого в 22n раз превышает максимально допустимое значение погрешности, формируют последовательность выборок первичного сигнала путем его дискретизации с выбранной частотой опроса, формируют последовательность передаваемых выборок путем преобразования последовательности выборок первичного сигнала, передают сформированную последовательность выборок по каналу связи на приемную сторону, на приемной стороне принимают полученную последовательность выборок, формируют восстановленную последовательность выборок первичного сигнала путем преобразования принятой последовательности выборок, восстанавливают первичный сигнал путем фильтрации последовательности выборок первичного сигнала, отличающийся тем, что на передающей стороне преобразование последовательности выборок первичного сигнала в последовательность передаваемых выборок осуществляют следующим образом: формируют 2n равномерно распределенных в пределах шкалы значений первичного сигнала пороговых уровней ui, сравнивают значение каждой выборки первичного сигнала со значениями всех пороговых уровней, определяют значение максимального из превышенных пороговых уровней, преобразуют значение каждой выборки первичного сигнала путем вычитания из него значения максимального из превышенных пороговых уровней, при этом на приемной стороне преобразование принятой последовательности выборок в восстановленную последовательность выборок первичного сигнала осуществляют следующим образом: определяют приращение значения каждой принятой выборки путем вычитания из него значения предшествующей принятой выборки, формируют минимальный ненулевой пороговый уровень, значение которого в 2n раз меньше шкалы значений первичного сигнала, сравнивают модуль приращения значения каждой принятой выборки с половиной значения минимального ненулевого порогового уровня, при превышении модуля приращения значения каждой принятой выборки половины значения минимального ненулевого порогового уровня и при отрицательном значении указанного приращения значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки, значения предшествующей восстановленной выборки первичного сигнала и значения минимального ненулевого порогового уровня, при превышении модуля приращения значения каждой принятой выборки половины значения минимального ненулевого порогового уровня и при положительном значении указанного приращения значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки и значения предшествующей восстановленной выборки первичного сигнала и вычитания из полученной суммы значения минимального ненулевого порогового уровня, при превышении половины значения минимального ненулевого порогового уровня модуля приращения значения каждой принятой выборки значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки и значения предшествующей восстановленной выборки первичного сигнала [1].
Принципиальное отличие известного способа от предлагаемого представления сообщений образами-остатками (1) заключается в том, что вместо сравнения значений результатов измерений x по модулю mi используют результаты превышения значениями x пороговых уровней ui. При превышении каждого из пороговых уровней счет значений x возобновляют и начинают с 0, поэтому получающиеся значения оказываются ограниченными по уровню значением разности между порогами Δui=ui+1.-ui. Сформированные таким образом значения от 0 до (Δui-1) совпадают со значениями образов-остатков bi при условии, что Δui=mi. Следовательно, известный способ может рассматриваться как эквивалентный предлагаемому способу сравнения по одному из модулей сравнения (1): x≡bi (mod mi). Формулировка модели (1) на инженерном языке позволила определить новый способ восстановления выборок (слов-измерений) при приеме сообщений. Он описан в формуле изобретения [1], когда рассматривается приемная сторона. Однако замена модулей mi разностями между порогами сравнения Δui оказывается сложной при большом числе сравнений (большом числе модулей сравнения). При этом возможности инженерного синтеза новых способов восстановления данных измерений становятся все более ограниченными по мере увеличения числа различных модулей сравнения mi. В этом случае более полезным с точки зрения реализации новых идей становится предлагаемый математический синтез новых технических решений на основе модели, представленной в виде системы остаточных классов (СОК) (системы сравнений, определяемой формулой (2)).
Основу предлагаемого способа составляет математическая модель преобразований значений телеметрируемых параметров (ТМП) x, называемых также выборками, словами и сообщениями ([2] (Кошевой А.А. Телеметрические комплексы летательных аппаратов. - М.: Машиностроение, 1975, с.176-181); [3] Современная телеметрия в теории и на практике / Учебный курс - Спб.: Наука и Техника, 2007. - 672 с.), которая определяется следующей системой сравнений ([4] (Лидл Р., Нидеррайтер Г. Конечные поля. В 2-х томах. Пер с англ. - М.: Мир, 1988. - 882 с.) [5] (Кукушкин С.С. Теория конечных полей и информатика: том. 1 Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках - М.: МО РФ, 2003. - 281 с., с.38-43)):

где m1=2n-1, m2=2n, m3=2n+1 - оптимально выбранные модули сравнения, а n - половина разрядности представления исходных традиционных слов-измерений (это означает, что если разрядность двоичного кода слов-измерений x равна 2n, то оптимально сформированные образы-остатки будут иметь n-разрядную позиционную структуру представления). При этом mk - это модули, которые появляются в результате разложения m1=2n-1 и m3=2n+1 на дополнительные сомножители, например: m11=2n/2-1 и m13=2n/2+1. Так, в случае исходного байтового представления слов-измерений (2n=8)m1=24-1=15, m11-24/2-1=3, а m13=24/2+1=5. Если 2n=10, то m3=25+1=33. Он также может быть представлен в виде следующих сомножителей: m31=3 и m32=11.
При этом расширенные возможности предлагаемого способа проявляются в следующем: 1) в обеспечении синтаксического сжатия данных телеизмерений, отличающегося от известных способов тем, что передаваемые приращения следующего значения телеметрируемого параметра (ТМП) относительно его предыдущего значения формируют в виде образов-остатков, имеющих строго определенную разрядность кодирования, которая существенно меньше по сравнению с исходным традиционным позиционным кодированием данных телеизмерений (фиг.1) (вариант №1 проблемно-ориентированного использования предлагаемого способа); 2) из образов-остатков, полученных в результате деления на определенные выбранные модули сравнения mi, например, m1=2n-1, m2=2n, m3=2n+1, формируют новые сообщения xn, составленные в определенном порядке из образов-остатков b1, b2, b3: xn=<b1 b2, b3>a, где а - основание кода (a=2, 3, 2α., 3β) (вариант №2 проблемно-ориентированного использования предлагаемого способа).
Принципиальное отличие предлагаемого от классического представления сообщений в виде разностей между предшествующими и последующими передаваемыми значениями, известного под названием дифференциальная импульсная кодовая модуляция (ДИКМ), заключается в том, что приращения представляются кодовыми конструкциями с равным числом символов в них [2, 3]. При ДИКМ разности должны представляться приращениями, имеющими разное число символов от 1 до 2n при исходном представлении слов-измерений 2n-разрядными кодовыми конструкциями.
Один из примеров САП на основе варианта №2 приведен на фиг.2. При этом на фиг.2(A) приведено графическое отображение телеметрируемого параметра (ТМП), представленного в традиционном виде 10-разрядным двоичным кодом (2n=10). На фиг.2(Б) тот же ТМП, значения которого в соответствии с предлагаемым способом были составлены из двух n-разрядных образов-полуслов, полученных в результате сравнений по модулям m1=2n-1=31 и m3=2n+1=33. При этом из-за увеличения кодового расстояния между соседними значениями в 2n+1 раз во столько же увеличивается и исходная шкала представления данных, которая ранее была равна: ШТИ=0-(22n-1). Благодаря этому обеспечивается возможность исправления до 4 ошибок передачи информации. Новое представление эквивалентно увеличению в 2n+1 раз амплитуды изменения значений ТМП и требуемой новой шкалы их представления. Однако для того, чтобы не вносить дополнительную избыточность в передаваемые данные передачу осуществляют в прежней шкале представления Шпрд=ШТИ=0-(22n-1). Из-за этого исходный непрерывный во времени ТМП претерпевает разрывы первого рода (фиг.2(Б)). Заключенные между ними преобразованные значения ТМП образуют «графические фрагменты». На фиг.2(Б) Шпрд=ШТИ=0-1023, поскольку исходные значения ТМП были представлены 10-разрядным двоичным кодом (2n=10).
Кроме того, получила новое решение метрологическая проблема многошкальных измерений, заключающаяся в том, что один и тот же ТМП необходимо было повторять как минимум в грубой и точной шкалах телеизмерений. Так, например, ТМП, представленный на фиг.2(A), представлен в грубой шкале, из-за чего информация о незначительных изменениях его значений (временной участок ожидаемого их проявления обведен овалом) утрачена. Для ее получения используют точную шкалу телеизмерений, однако при этом, чаще всего, оказывается потерянным начальный участок телеметрического контроля, характеризующийся существенными изменениями значений ТМП. Таким образом, в существующей практике телеметрирование одного и того же информационно-значимого ТМП производится одновременно в двух шкалах: грубой и точной.
При предлагаемом нетрадиционном представлении значений ТМП (фиг.2(Б)) измерения получены на всех временных участках телеметрического контроля летательного аппарата (ЛА). При этом слова-измерения были переданы только один раз.
Применительно к случаю, графическое представление САП которого представлено на фиг.2(Б), эффект синтаксического сжатия в явном виде не проявляется, как это имеет место в первом из рассмотренных случаев (фиг.1). Его присутствие обнаруживается при появлении ряда технических эффектов, например, в виде возможности исправления ошибок передачи и контроля достоверности принимаемых сообщений. О наличии неявно проявляющегося эффекта синтаксического сжатия во втором случае нетрадиционного представления данных и сообщений свидетельствует классическая теория помехоустойчивого кодирования, которая утверждает, что без введения избыточности не представляется возможным обнаружить, а тем более исправить ошибки передачи [6] (Райнес Р.Л., Горяинов О.А. Телеуправление, М-Л., Энергия, 1965. - 536 с. (с.108)).
Таким образом, предлагаемый способ передачи информации заключается в сборе сигналов от источников сообщений и преобразовании их в двоичный код, синхронизации сформированных слов-измерений, представленных 2n-разрядным двоичным кодом, по времени и формировании из них уплотненного цифрового группового сигнала, подлежащего передаче по каналам связи. Он отличается тем, что на передающей стороне слова-измерения преобразуют в образы-остатки путем операций, эквивалентных делению их значений на выбранные определенным образом числа, представляющие собой модули сравнения, из образов-остатков формируют новые информационные слова и расставляют их в уплотненном цифровом групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, в том числе и в той, в которой должны были бы передаваться исходные слова-измерения, сформированные из образов-остатков, цифровой уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность информационных слов и осуществляют их обработку с целью восстановления первоначальных результатов измерений с исправлением ошибок передачи и оцениванием достоверности полученной информации.
Дополнение к предлагаемому способу (дополнение по п.1) отличается тем, что каждое из первоначально сформированных 2n-разрядных двоичных слов, представляющих собой результаты телеизмерений, заменяют на новые 2n-разрядные двоичные информационные слова, составленные из двух n-разрядных образов-остатков, полученных в результате деления измеренных величин, соответственно, на числа 2n-1 и 2n+1, представляющие собой модули сравнения, сформированные информационные слова подставляют в уплотненный цифрового групповой сигнал на место, которое было закреплено за первоначально сформированными словами.
Предлагаемый способ также предполагает использование замещающих операций для того, чтобы не осуществлять традиционного деления числа x на число mi. Основу для достижения технического эффекта в виде повышения оперативности замены x на новое сообщение xn составляют свойства двоичного кода, которым представляют результаты выполненных измерений. В этом случае наиболее просто реализуют преобразование значений x в остатки b2 по модулю m2=2n. Для этого из слов-измерений x, представленных 2n-разрядным двоичным кодом, необходимо исключить n старших разрядов, а для передачи оставить n младших разрядов. Шкала представления результата телеизмерения Шкод ограничена разрядностью представления слов. Например, следующими значениями при 2n=8:<0000.0000>2=<0>10 и <1111.1111>2=<255>10 (Шкод=(0-(28-1))).
Так, например, если значение ТМП, которое необходимо передать, представлено 8-разрядным двоичным кодом (2n=8) и равно x=<116>10=<0111.0100>2 (тр.код), то при использовании предлагаемого изобретения в соответствии с вариантом №1 передаче подлежит только образ-остаток b2=<0100>2=<4>10, представляющий собой 4 младших разряда исходного слова. При этом 4 старших разряда (<0111>2) из передачи исключают. В результате этого объем данных, относящихся к ТМП, обладающими свойствами непрерывности, будет уменьшен в два раза.
Таким образом, представление значений ТМП образами-остатками b2i, полученными от сравнения по одному из модулей сравнения m2=2n, относится к числу самых простых с точки зрения реализации и достаточно эффективных по достигаемому при этом коэффициенту сжатия Ксж=2. При этом используется простейшая операция, эквивалентная математической операции деления числа x на число m2, заключающаяся в исключении из передачи старшего полуслова 2n-разрядного исходного слова-измерения <x>2, содержащего n двоичных разрядов.
Полученный при этом эффект синтаксического сжатия данных ТМП может быть использован и для решения других проблем телеизмерений. Например, для повышения точности телеизмерений за счет уменьшения погрешности квантования значений ТМП при цифровом их представлении. Так, в бортовой радиотелеметрической системе (БРТС) с временным разделением каналов (ВРК) вместо восьмиразрядного аналого-цифрового преобразователя (АЦП) может быть использован 16-разрядный АЦП. При этом в канал связи будут передаваться в соответствии с принятым способом сжатия данных (вариант №1) только восемь младших разрядов формируемых 16-разрядных слов-измерений. Например, вместо исходного значения слова-измерения xi=<01110101.01111001>2=<30073>10 в канал связи будет передан его остаток, полученный по модулю m2=28=256 и равный b2i=<01111001>2=<121>10.
Такой случай передачи значений ТМП представлен в виде графической иллюстрации, приведенной на фиг.1. При этом разрядность передаваемых данных осталась такой же, как и при традиционном способе представления значений ТМП с использованием 8-разрядного АЦП. Технический эффект проявляется в том, что в телеметрической системе с временным разделением каналов (ВРК), ориентированной на число (2n=8) разрядов представления слов можно передавать ТМП с различными погрешностями квантования: 1) при традиционном представлении слов 8 разрядами погрешность квантования будет равна: δтр=100%/28=0,39%; 2) при передаче 8-разрядными образами-остатками погрешность квантования будет уменьшена в 256 раз до значения δп=100%/216=1,52×10-3%.
Замещающие операции, позволяющие отказаться от деления 2n-разрядных слов-измерений x на модули сравнения m1=2n-1 и m3=2n+1 также заключаются в разделении исходных слов на два полуслова: n-разрядное старшее и n-разрядное младшее. Их суть поясняют следующие примеры.
Пример 1. Предположим что слово-измерение x представлено 10-разрядным двоичным кодом (2n=10):x=<116>10=<00011.10100>2. Следовательно, старшее полуслово - это ac=<00011>2, а младшее - ам=<10100>2.
1) Для нахождения остатка b1 по модулю m1=2n-1=25-1=31 необходимо выполнить следующую операцию: сложить в 6-разрядном двоичном сумматоре старшее и младшее полуслова, старший пятый разряд сумматора сложить с первым:
 Проверка: 116=31×3+23.
Проверка: 116=31×3+23.
2) Для нахождения остатка b3 по модулю m3=33 необходимо выполнить следующую операцию: сложить в 6-разрядном двоичном сумматоре инвертированное старшее и прямое младшее полуслова, старший пятый разряд сумматора сложить с первым:
 Проверка: 116=33×3+17.
Проверка: 116=33×3+17.
Однако у алгоритма определения остатка b3 по модулю m3=33 есть одна особенность: при появлении в старшем шестом разряде сумматора двоичного символа «0» необходимо к младшему разряду добавить число <2>10=<10>2.
Универсальный алгоритм контроля достоверности приема данных при наличии помех и ошибок основан на дополнительном разложении числа-модуля на сомножители. Например, если m3=25+1=33, то его можно представить в виде произведения модулей меньшей размерности: m31×m32, где m31=3, а m32=11.
При этом и принимаемый образ-остаток b3, и исходное число x должны иметь один и тот же остаток при следующих сравнениях:


Пример 2. В первом примере x=<116>10=<00011.10100>2, а найденный образ-остаток b3=17.
Поверим достоверность его приема:
116=17 (mod 33), 17=2 (mod 3) и 116=2 (mod 3)
116=17 (mod 33), 17=6 (mod 11) и 116=6 (mod 11).
Равенство образов-остатков (выделены жирно) по сомножителям числа 33 принятого значения первичного образа 17 и восстановленного сообщения x=116 свидетельствуют, что передача осуществлена без ошибок.
Следующее дополнение к предлагаемому способу (дополнение по п.1 или 2) отличается тем, что исходные 2n-разрядные слова-измерения делят на старшее и младшее n-разрядные полуслова, при этом результат сравнения по модулю 2n представляет собой младшее n-разрядное полуслово, которое подставляют в качестве передаваемого сообщения в формируемый уплотненный цифровой сигнал при необходимости сокращения объемов передаваемых данных, а результаты сравнения по модулям 2n-1 и 2n+1 получают путем суммирования в (n+1)-разрядном двоичном сумматоре младшего и старшего n-разрядных полуслов, при этом старший (n+1)-й двоичный символ сумматора складывают по модулю 2 с самым младшим разрядом сумматора, притом в случае определения образа-остатка по модулю 2n+1 младшее полуслово суммируют с инвертированным старшим полусловом, а при появлении в старшем (n+1)-м разряде сумматора двоичного символа «0» необходимо к младшему разряду добавить число <10>2, представленное в двоичном коде.
Существуют также другие способы замены операции деления. Один из них реализован в прототипе [2]. Рассмотренные операции, замещающие операцию деления, позволяют существенно упростить процедуру замены исходных значений ТМП их образами-остатками.
Для повышения показателей достоверности приема сообщений необходимо иметь несколько способов восстановления ТМИ в ее первоначальном виде. Один из способов восстановления при приеме значений ТМП в исходном виде используют в прототипе [1]. Однако при повышенных требованиях к достоверности приема ТМИ требуется большое количество различных алгоритмов восстановления, использование которых приводило бы к отсутствию или уменьшению корреляции между ошибками, искажающими полученные результаты телеизмерений.
Основной алгоритм восстановления при приеме ТМП, представленного в предлагаемом нетрадиционном виде (варианты №1 и №2), заключается в следующем.
1. Необходимо выделить графические фрагменты образов-остатков между соседними разрывами, обозначенными на фиг.1 в виде вертикальных линий. Основу идентификации разрывов графических фрагментов представления ТМП образами-остатками составляют операции численного дифференцирования: Δbi/Δt→max, где Δbi=bi+1-bi - наибольшая разность между соседними значениями образов-остатков ТМП, равная модулю сравнения mi, a Δt - минимальный интервал опроса ТМП, определяемый в соответствии с теоремой В.А. Котельникова.
2. Заключенный между разрывами графический фрагмент представления ТМП образами-остатками перемещают вверх или вниз, как это показано на фиг.3, для образования ТМП в виде непрерывной функции времени x(t). При этом производные в точках, относящихся к концу предыдущего фрагмента и началу следующего, должны быть равны:

где Δt=ti-ti+1 - временной интервал между соседними данными ТМП, значение которого определяется выбранной частотой их опроса при ВРК между значениями фрагментов, вблизи точки разрыва первого рода.
В результате описанной операции соединения графических фрагментов представления ТМП образами-остатками при приеме будут, например, восстановлены недостающие 8 старших разрядов в каждом их переданных образов-остатков (фиг.1 и фиг.3).
Дополнительные алгоритмы восстановления предполагают использование следующих теорем об остатках: китайской и конструктивной [4, 5].
1. В соответствии с классической теорией конечных полей превращение остатков в окончательный результат может быть произведено только на основе китайской теоремы об остатках [5], использующей следующий алгоритм восстановления:

где  и
и  - мультипликативно обратные элементы:
- мультипликативно обратные элементы:
 и
и  .
.
Для восстановления в соответствии с классическим алгоритмом китайской теоремы об остатках необходимо найти мультипликативно обратные элементы и . Для модулей сравнения m1=15 и m2=17:17×8=136≡1 (mod 15); 15×8=120≡1 (mod 17). Следовательно,  и
и  .
.
При значениях принятых образов-остатков b1=11 и b2=14 получим следующую формулу восстановления значения x:

Однако классический алгоритм решения восстановления данных не вполне удовлетворяет потребностям практического применения по следующим причинам: 1) он сложен; 2) его мультипликативная структура построения приводит к усилению ошибок из-за того, что остатки, искаженные помехами, умножают на большие числа (применительно к рассмотренному случаю на числа 136 и 120 (формула (6*)).
Кроме того, основной недостаток китайской теоремы об остатках заключен в возможности их использования только при взаимно простых модулях сравнения (mi, mj)=1, в необходимости нормализации результата вычислений, заключающегося в нахождении его остатка по модулям mi, i=l, 2,…, k или произведению модулей (m1×m2=15×17=255) (6*).
Отмеченных недостатков лишена предлагаемая конструктивная теорема об остатках (КТО) [5], приводящая к следующему подходу в решении задачи восстановления данных, представленных образами-остатками:
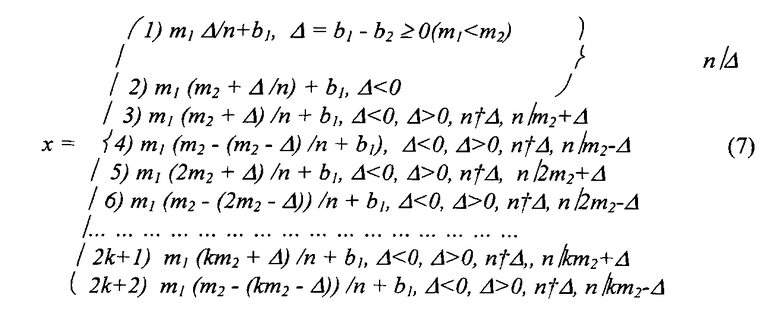
где mi - модули сравнения, bi - образы-остатки, n=|m1-m2| - абсолютная разность между модулями сравнения.
Обозначения n†Δ, n/km2+Δ, nΔ/, n/km2-Δ (k=0, 1,…) читаются так: Δ не делится на n без остатка и km2+Δ, km2+Δ делятся на n без остатка.
Алгоритм является адаптивным, так как число его звеньев k, которые необходимо использовать для восстановления данных в традиционном виде, определяется значением n=|m1-m2| (k=n+1). Это означает, что, если n=1, то необходимо использовать только два первых звена формулы (7):

Если n=|m1-m2|=2, как это имеет место в случае выбора m1=15 и m2=17, то число звеньев k алгоритма равно 3 (7**):

Предположим, что в новом слове-измерении содержатся следующие два остатка b1=11 и b2=14, которые, как известно пользователю, получены от деления числа x на модули сравнения m1=15 и m2=17.
Для применения адаптивного алгоритма КТО необходимо определить следующие исходные данные: n=|m1-m2|=|15-17|=2 и Δ=b1-b2=11-14=-3<0. Условие делимости дельта Δ на n не выполняется, поскольку -3 не делится на 2 без остатка, но (mi+Δ) на 2 делится. Следовательно, необходимо воспользоваться третьим звеном формулы (8(3)):

В сравнении с классическим алгоритмом восстановления данных новое свойство алгоритма КТО заключено в возможности контроля достоверности восстановления слова-измерения: результат 116 повторен дважды. Кроме того, устранен основной недостаток классического алгоритма китайской теоремы, заключающийся в усилении ошибок ε1 и ε2, искажающих образы-остатки при передаче ТМИ:  и
и  . Это происходит оттого, что ошибки умножаются на большие коэффициенты 136 и 120: εкит=136ε1+120ε2. В предлагаемом адаптивном алгоритме они вычитаются: Δ*=(b1+ε1)-(b2+ε2)=Δ-(ε1-ε2). Если среднеквадратическая погрешность шума εi, искажающего образы-остатки bi, равна σεi, то погрешность определения Δ равна
. Это происходит оттого, что ошибки умножаются на большие коэффициенты 136 и 120: εкит=136ε1+120ε2. В предлагаемом адаптивном алгоритме они вычитаются: Δ*=(b1+ε1)-(b2+ε2)=Δ-(ε1-ε2). Если среднеквадратическая погрешность шума εi, искажающего образы-остатки bi, равна σεi, то погрешность определения Δ равна 


Дополнительный положительный эффект также проявляется в возможности контроля достоверности принятого единичного телеизмерения при использовании двух и более модулей сравнения на основе определения абсолютных разностей между принятыми значениями предшествующих и последующих отсчетов ТМП (фиг.4). Из приведенных данных следует, что совпадение абсолютных разностей

свидетельствует о том, что такими же были и соответствующие разности |Δ1b1|=|Δ1b2|=|Δ1xi| и |Δ2b1|=|Δ2b2|=|Δ2xi| при их передаче.
Подобная возможность при традиционном представлении и передаче слов-измерений отсутствует, поэтому для контроля достоверности приема ТМИ используются дополнительные символы «контроля четности бит «1» или «0» в передаваемом сообщении».
Система, реализующая предлагаемый способ (фиг.5), на передающей стороне содержит: датчики, коммутатор 6 телеметрируемых параметров и источников сообщений, передатчик 7, канал связи 8. Отличается тем, что датчики представлены двумя группами: датчиками 11, 12,…1N телеизмерений группы №1 и датчики 21, 22,…2К телеизмерений группы №2. Кроме того, в нее введены блок 3 синтаксического сжатия результатов телеизмерений, блок 4 сжатого помехоустойчивого кодирования данных телеизмерений, блок 5 управления с функциями адаптивного изменения режимов формирования и передачи ТМИ, при этом выходы датчиков 11, 12,…1N телеизмерений группы №1 подключены через блок 3 синтаксического сжатия результатов телеизмерений к первой группе входов коммутатора 6, а выходы датчиков 21, 22,…2K телеизмерений группы №2 подключены через блок 4 сжатого помехоустойчивого кодирования данных телеизмерений ко второй группе входов коммутатора 6, дополнительный вход которого соединен с первым выходом блока 5 управления, второй выход которого соединен с объединенными дополнительными входами блока 3 синтаксического сжатия результатов телеизмерений и блока 4 сжатого помехоустойчивого кодирования данных телеизмерений, а вход блока 5 управления является управляющим входом бортовой системы телеизмерений, выход коммутатора 6 соединен со входом передатчика, передающего ТМИ по каналу связи 8 в условиях помех 27. На приемной стороне в состав системы входят: приемник 9, декоммутатор 10 телеметрируемых параметров и источников сообщений, блоки 111 и 112 восстановления сжатых значений телеизмерений групп №1 и №2, соответственно, блок 12 декодирования данных телеизмерений группы №2 на основе алгоритмов КТО, блок 13 совместной обработки двух восстановленных результатов телеизмерений группы №2, блок 14 контроля достоверности, регистратор 15. При этом выход приемника 9 соединен со входом декоммутатора 10 телеметрируемых параметров и источников сообщений, первая группа из N выходов которого соединена с соответствующими входами блока 111 восстановления сжатых значений телеизмерений группы №1, N выходов которого соединены с первой группой входов регистратора, вторая группа из К выходов декоммутатора 10 подключена к соответствующим объединенным входам блока 112 восстановления сжатых значений телеизмерений группы №2 и блока 12 декодирования данных телеизмерений группы №2, К выходов которого подключены к объединенной первой группе из К входов блока 13 совместной обработки двух восстановленных результатов телеизмерений группы №2, которые подключены к соответствующим К входам блока 14 контроля достоверности, К выходов каждого из которых подключены ко второй группе входов регистратора, состоящих из 2К входов, К выходов блока 112 восстановления сжатых значений телеизмерений группы №2 соединены с соответствующими входами второй группы входов блока 13 совместной обработки двух восстановленных результатов телеизмерений группы №2, дополнительный синхронизирующий выход декоммутатора 10 подключен к объединенным синхронизирующим входам блоков 111 и 112 восстановления сжатых значений телеизмерений групп №1 и №2, блока 12 декодирования данных телеизмерений группы №2 на основе алгоритмов КТО, блока 13 совместной обработки двух восстановленных результатов телеизмерений группы №2, блока 14 контроля достоверности и регистратора 15, выход которого является выходом системы.
На фиг.6 представлена структурная схема блоков 111 и 112 восстановления сжатых значений телеизмерений групп №1 и №2. Она содержит: определитель 38 разностей между соседними значениями переданного ТМП, сумматоры 39 и 40, формирователь 41 и 42 интервалов графических фрагментов, формирователь 43 интервалов графических фрагментов с классификационными признаками разрывов 4-х типов (461, 462, 463, 464), формирователь 44 значений ТМП, восстановленных в исходных шкалах представления телеизмерений Шпред, формирователь 45 значений ТМП, восстановленных в исходных шкалах телеизмерений ШТИ с идентификационными признаками разрывов, восстановленных в исходных шкалах телеизмерений ШТИ. При этом информационные входы 30i, i=1, 2,.., N блока 111 восстановления сжатых значений телеизмерений группы №1 и входы 31j, j=1, 2,…, К блока 112 восстановления сжатых значений телеизмерений группы №2 являются первыми входами определителя 38 разностей между соседними значениями переданного ТМП соответствующих блоков, первый выход которого подключен к объединенным первым входам сумматоров 39 и 40, а также формирователей 41 и 42 интервалов графических фрагментов, вторые входы каждого из которых соединены с объединенными знаковыми вторым и третьим выходами определителя 38 разностей между соседними значениями переданного ТМП, соответственно, третьи входы сумматоров 39 и 40 объединены и подключены к информационному входу определителя 38 разностей между соседними значениями переданного ТМП, выходы формирователей 41 и 42 интервалов графических фрагментов подключены к соответствующим первому и второму входам формирователя 43 интервалов графических фрагментов с классификационными признаками разрывов 4-х типов, основной выход которого подключен к объединенным четвертым входам сумматоров 39 и 40, выходы которых соединены с первым и вторым входами формирователя 44 значений ТМП, восстановленных в исходных шкалах представления телеизмерений Шпред, соответственно, выход которого подключен к основному входу формирователя 45 значений ТМП, восстановленных в исходных шкалах телеизмерений ШТИ, к дополнительным четырем входам которого подключены дополнительные четыре выхода, соответствующие четырем с идентификационным признаком разрывов, выход формирователя 45 значений ТМП, восстановленных в исходных шкалах телеизмерений ШТИ, является выходом соответствующих блоков 111 и 112 восстановления сжатых значений телеизмерений групп №1 и №2.
Работа устройства заключается в следующем.
Датчики информации делят в соответствии с утвержденной Программой телеизмерений на две основные группы: 11, 12,…1N и 21, 22,…2K (фиг.5). В первую группу входят ТМП, которые должны быть получены с меньшими погрешностями квантования. Кроме того, к этой же группе №1 относятся ТМП, которые характеризуются большой избыточностью (сигнальные, сервисные, определяющие циклограмму полета ЛА, температурные, параметры мониторинга технического состояния ЛА и бортовой аппаратуры и т.д.). Они могут быть переданы в сжатом виде с использованием результатов сравнений по одному из модулей сравнения mi.
Во вторую группу входят информационно-значимые ТМП, к достоверности восстановления которых предъявляются повышенные требования. Их разрядность представления может быть равна основной, которая, например, применялась ранее.
Далее переводят измеряемые физические величины в электрические сигналы, например в напряжение, представленное значениями в ограниченном диапазоне, называемом шкалой измерений. Чаще всего, этот диапазон ограничен значениями 0 и 6 вольт (v). При этом 0v представляется в качестве нижнего калибровочного уровня, принимаемым за 0% шкалы измерений, a 6v определяет верхний калибровочный уровень, соответствующий 100% шкалы измерений. Для каждого датчика снимается тарировочная характеристика, позволяющая при обработке ТМИ перейти от процентного представления значений ТМП к физическим значениям измеренной величины. Сформированные датчиками аналоговые сигналы поступают на соответствующий аналого-цифровой преобразователь (АЦП), осуществляющие преобразование дискретных (квантованных) по времени значений аналогового сигнала в 2n-разрядный двоичный код. В отечественной практике слова-измерения, в основном, представлены 10 и 12 битами [3].
Далее сформированные слова-измерения соответствующей разрядности поступают, соответственно, в блок 3 синтаксического сжатия результатов телеизмерений и блок 4 сжатого помехоустойчивого кодирования данных телеизмерений, в которых сформированные слова-измерения делят на старшие аст и младшие амл полуслова. В блоке 3 старшие аст полуслова исключаются и последующей передаче подлежат только младшие амл полуслова. В блоке 4, представляющем собой 2К параллельно работающих (n+1)-разрядных сумматоров, выделенные старшие и младшие полуслова суммируют с добавлением старшего (n+1)-го разряда к содержимому самого младшего (первого) его разряда. При этом по каждому из ТМП эта операция производится дважды: в первом случае суммируются старшие и младшие полуслова в прямом виде, а во втором случае символы старшего полуслова перед суммированием инвертируют.
Сформированные новые сообщения подают на коммутатор 6, осуществляющий формирование цифрового группового сигнала (ЦТС) с временным уплотнением каналов (ВРК) [3]. В передатчике 7 сформированным ЦТС модулируют несущую радиосигнала.
При приеме ТМИ реализуются обратные алгоритмы преобразований, приводящие, в итоге, к восстановлению данных телеизмерений в их первоначальном виде. С этой целью принятый приемником 9 и восстановленный ЦТС поступает в декоммутатор 10 телеметрируемых параметров и источников сообщений. В нем реализуют операцию разуплотнения (обратную по отношению операции уплотнения, выполняемой на борту контролируемого ЛА), предполагающую выделение ТМП и сообщений других источников информации. К другим источникам сообщений относят, к примеру, данные бортового цифрового вычислительного комплекса (БЦВК) и бортовой аппаратуры потребителей (БАП), использующих сигналы спутниковой аппаратуры потребителей (БАЛ), использующих сигналы спутниковых радионавигационных систем (СРНС). Кроме того, в декоммутаторе 10 телеметрируемых параметров и источников сообщений в соответствии заданной управляющей информацией, производится выбор данных, которые относятся к ТМП групп №1 и №2. При этом восстановление сжатых данных ТМП, представленных образами-остатками по одному модулю сравнения m2i=2n, осуществляют в блоке 111 на основе алгоритма, графическое представление операций которого приведено на фиг.3. Восстановление данных ТМП, представленных образами-остатками по двум модулям сравнения m1i=2n-1 и m3i=2n+1, осуществляют в блоках 112 и 12. Принципы работы блоков 111 и 112 не имеют принципиальных отличий. Обобщенная их схема приведена на фиг.6. В блоке 12 реализуют второй алгоритм восстановления сжатых данных, составленных из двух образов-остатков.
Полученные результаты сравнивают в блоке 13 совместной обработки двух восстановленных результатов телеизмерений группы №2. При этом исправляют ошибки передачи, вызванные действием помех 27 в канале связи. Одновременно в блоке 14 осуществляют контроль достоверности восстановленных ТМП по критерию (10). Полученные результаты регистрируют в регистраторе 15 и в последующем используют при обработке полученной информации.
Для синхронизации процессов передачи, приема и обработки ТМИ используют блок 5 управления, который в соответствии с записанной в него информацией, осуществляет выбор необходимого режима телеизмерений, формирования преобразованных сообщений и их уплотнения в ЦТС. Кроме того, по командам, поступающим на вход коммутатора от блока 5 управления, реализуют различные технологии формирования ЦТС, обеспечивающие адаптацию БРТС, понимаемую в расширенном смысле, как наилучшее приспособление: 1) к неравномерности потока передаваемой ТМИ, определяемой отделениями телеметрируемых элементов конструкций ракеты; 2) прогнозируемым сбоям в приеме ТМИ; 3) к нештатным и аварийным ситуациям.
При приеме выделяются и восстанавливаются синхронизирующие сигналы 32 и сигналы частотно-временного обеспечения ГНСС ГЛОНАСС/GPS, которые используют для синхронизации процессов восстановления ТМИ и ее временной привязки к сигналам точного времени.
Основной технический эффект проявляется в возможности разрешения многих существующих противоречий в области телеизмерений. К их числу относятся:
1) большая избыточность данных телеизмерений при представлении телеметрических параметров (ТМП) дискретными значениями в соответствии с теоремой В.А. Котельникова, приводящая к огромным потокам ТМИ, с одной стороны, и ограниченная пропускная способность радиоканалов связи, не позволяющая их передать в полном объеме, - с другой;
2) ограниченные временные возможности для приема ТМИ при испытаниях баллистических ракет и необходимостью сброса в это ограниченное время большого объема данных.
Кроме того, существующую ракетную телеметрию часто называют «телеметрией нормального пуска», что связано с массовым проявлением эффекта «зашкаливания» данных ТМП, происходящим вследствие того, что заранее рассчитываемые диапазоны изменения их значений не были ориентированы на возможность нештатных и аварийных ситуаций, а ТМИ особенно нужна в таких случаях. Предлагаемое нетрадиционное представление данных позволяет его исключить, поскольку не устанавливает жестких ограничений на выбор шкал телеизмерений.
Быстрый рост объема ТМИ приводит к значительному ухудшению показателей помехоустойчивости передачи и достоверности получаемых данных, при этом другие возможности разрешения этого противоречия, кроме перехода на нетрадиционные методы, к числу которых относится сжатие сообщений, их представление образами-остатками, формирование новых сигнально-кодовых конструкций практически уже исчерпаны.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2739335C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ОБНАРУЖЕНИЕМ И ИСПРАВЛЕНИЕМ ОШИБОК ПЕРЕДАЧИ | 2017 |
|
RU2658795C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ ДАННЫХ ИЗМЕРЕНИЙ | 2017 |
|
RU2672392C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ ЭКОНОМНОГО ПРЕДСТАВЛЕНИЯ И ПЕРЕДАЧИ БИПОЛЯРНЫХ ДАННЫХ И СИГНАЛОВ | 2017 |
|
RU2649291C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ КОМПЬЮТЕРНЫХ КОДОВ | 2023 |
|
RU2820092C1 |






Изобретение относится к телеметрии и может быть использовано в системах передачи данных по каналам связи при летных испытаниях ракетно-космической техники. Технический результат заключается в обеспечении сжатия данных телеизмерений на синтаксическом - битовом уровне при уменьшении погрешностей квантования телеметрируемых параметров (ТМП) и повышении помехоустойчивости передачи сообщений. В способе и системе осуществляют многошкальные измерения, когда один и тот же информационно-значимый ТМП приходилось представлять и передавать в нескольких шкалах измерений, например в грубой и точной, при этом исключают эффект «зашкаливания» значений ТМП в нештатных и аварийных ситуациях, поскольку заранее выбранные шкалы телеизмерений не будут соответствовать реальным их значениям, полученным в ходе летного эксперимента. На передающей стороне слова-измерения преобразуют в образы-остатки путем операций, эквивалентных делению их значений на выбранные определенным образом числа, представляющие собой модули сравнения, из образов-остатков формируют новые информационные слова и расставляют их в уплотненном цифровом групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, сформированный из образов-остатков цифровой уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность информационных слов и осуществляют их обработку с целью восстановления первоначальных результатов измерений с исправлением ошибок передачи и оцениванием достоверности полученной информации. 2 н. и 5 з.п. ф-лы, 6 ил.
1. Способ передачи информации, заключающийся в том, что на передающей стороне осуществляют сборе сигналов от источников сообщений, преобразуют их в двоичный код, обеспечивают синхронизацию сформированных слов-измерений, представленных 2n-разрядным двоичным кодом, по времени и формируют из них уплотненный цифровой групповой сигнал, подлежащий передаче по каналам связи, отличающийся тем, что на передающей стороне слова-измерения преобразуют в образы-остатки путем операций, эквивалентных делению их значений на выбранные определенным образом числа, представляющие собой модули сравнения, например, m1=2n-1, m2=2n, m1=2n+1, где 2n - разрядность двоичного кода слова-измерения, а (0 - (2n-1)) - шкала представления значений телеметрируемых параметров, из образов-остатков формируют новые информационные слова и расставляют их в уплотненном цифровом групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, в том числе и в той, в которой должны были бы передаваться исходные слова-измерения, сформированный из образов-остатков цифровой уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность информационных слов и осуществляют их обработку с целью восстановления первоначальных результатов измерений с исправлением ошибок передачи и оцениванием достоверности полученной информации.
2. Способ по п. 1, отличающийся тем, что каждое из первоначально сформированных 2n-разрядных двоичных слов, представляющих собой результаты телеизмерений, заменяют на новые 2n-разрядные двоичные информационные слова, составленные из двух n-разрядных образов-остатков, полученных в результате деления измеренных величин, соответственно, на числа 2n-1 и 2n+1, представляющие собой модули сравнения, сформированные информационные слова подставляют в уплотненный цифрового групповой сигнал на место, которое было закреплено за первоначально сформированными словами.
3. Способ по п. 1 или 2, отличающийся тем, что исходные 2n-разрядные слова-измерения делят на старшее и младшее n-разрядные полуслово, при этом результат сравнения по модулю 2n представляет собой младшее n-разрядное полуслова, которое подставляется в качестве передаваемого сообщения в формируемый уплотненный цифровой сигнал при необходимости сокращения объемов передаваемых данных, а результаты сравнения по модулям 2n-1 и 2n+1 получают путем суммирования в (n+1)-разрядном двоичном сумматоре младшего и старшего n-азрядных полуслов, при этом старший (n+1)-й двоичный символ сумматора складывают по модулю 2 с самым младшим разрядом сумматора, при этом в случае определения образа-остатка по модулю 2n+1 младшее полуслово суммируют с инвертированным старшим полусловом, а при появлении в старшем (n+1)-м разряде сумматора двоичного символа «0» необходимо к младшему разряду добавить число<10>2, представленное в двоичном коде.
4. Способ по любому из пп. 1-3, отличающийся тем, что при приеме преобразованных 2n-разрядных двоичных слов-измерений их разделяют на равные по разрядности n-разрядные полуслова-остатки, на основе заданной Программы телеизмерений и управляющих сигналов, определяющих заранее предусмотренные режимы вносимых изменений в процесс формирования уплотненного цифрового группового сигнала, осуществляют выделение двух групп телеметрируемых параметров (ТМП), для передачи значений которых использовали представление данных одним и двумя образами-остатками, в случае представления данных с использованием одного модуля сравнения m2 находят разрывы, определяющие границы графических фрагментов bi(t), t=kTo, где To - интервал опроса значений ТМП, определяемый теоремой дискретизации В.А. Котельникова, k=1, 2, 3, … - натуральный ряд чисел, используя признаки идентификации разрывов в виде разностей первого порядка Δbi=bi+1-bi, абсолютное значение которых находится в интервале (0,9-1) m2 с учетом того, что знак разности меняется на противоположный, а в случае представления данных двумя образами остатками xn=<b1, b3>2 - разрывы, определяющие границы графических фрагментов xni(t), t=kTo, при которых разности первого порядка Δxni=xn(i+1)-xni меняют знак на противоположный, а их абсолютное значение находится в интервале (0,9-1) m1×m3, при этом заключенный между разрывами графический фрагмент в рассмотренных обоих случаях, образованный восстановленными значениями представления телеметрируемого параметра образами-остатками, перемещают вверх при положительных значениях разностей Δbi и Δxni, соответственно, или вниз при отрицательных значениях разностей Δbi и Δxni до образования графического отображения телеметрируемого параметра в виде непрерывной функции времени, достоверность объединения предыдущего и последующего фрагментов контролируют на основе равенства численных производных Δbi/Δt и Δxni/Δt в точках, относящихся к концу предыдущего фрагмента и началу следующего, при этом диапазон изменения значений Δxni внутри каждого из выделенных графических фрагментов уменьшают на величину кодового расстояния d=(2n+1).
5. Способ по п. 4, отличающийся тем, что при приеме для восстановления значений выделенных групп телеметрируемого параметра, представленных двумя образами-остатками, в первоначальном его виде, формируемом датчиком, определяют разности между значениями образов-остатков по модулям сравнения 2n-1 и 2n+1, полученные разности делят на 2, если деление выполняется без остатка, при разностях, равных нулю и больше нуля, уменьшенные в 2 раза значения разностей с положительным знаком умножают на один из модулей сравнения, а к полученному результату добавляют соответствующий этому модулю образ-остаток; при разностях меньших нуля, и выполнении условия деления на 2 без остатка полученные и уменьшенные в 2 раза значения отрицательных разностей суммируют со значением одного из модулей сравнения, а найденные в результате суммирования данные умножают на другой модуль сравнения и его же образ-остаток добавляют к полученному результату вычислений; при невыполнении условия делимости без остатка разностей между значениями образов-остатков на 2 их складывают с одним из чисел-модулей, полученные при этом значения делят на 2, после чего результат деления умножают на число другого модуля сравнения и к найденным данным добавляют его же образ-остаток.
6. Система для передачи информации, содержащая на передающей стороне датчики, коммутатор телеметрируемых параметров и источников сообщений, передатчик, на приемной стороне в состав системы входят приемник, декоммутатор телеметрируемых параметров и источников сообщений и регистратор, отличающаяся тем, что датчики представлены двумя группами, при этом введены блок синтаксического сжатия результатов телеизмерений, блок сжатого помехоустойчивого кодирования данных телеизмерений, блок управления с функциями адаптивного изменения режимов формирования и передачи телеметрической информации, выходы датчиков группы №1 подключены через блок синтаксического сжатия результатов телеизмерений к первой группе входов коммутатора, а выходы датчиков группы №2 подключены через блок сжатого помехоустойчивого кодирования данных телеизмерений ко второй группе входов коммутатора, дополнительный вход которого соединен с первым выходом блока управления с функциями адаптивного изменения режимов формирования и передачи телеметрической информации, второй выход которого соединен с объединенными дополнительными входами блока синтаксического сжатия результатов телеизмерений и блока сжатого помехоустойчивого кодирования данных телеизмерений, а вход блока управления является управляющим входом бортовой системы телеизмерений, выход коммутатора соединен со входом передатчика, введены блоки восстановления сжатых значений телеизмерений групп №1 и №2, соответственно, блок декодирования данных телеизмерений группы №2, блок совместной обработки двух восстановленных результатов телеизмерений группы №2, блок контроля достоверности, при этом выход приемника соединен со входом декоммутатора телеметрируемых параметров и источников сообщений, первая группа из N выходов которого соединена с соответствующими входами блока восстановления сжатых значений телеизмерений группы №1, N выходов которого соединены с первой группой входов регистратора, вторая группа из К выходов декоммутатора подключена к соответствующим объединенным входам блока восстановления сжатых значений телеизмерений группы №2 и блока декодирования данных телеизмерений группы №2, К выходов которого подключены к объединенной первой группе из К входов блока совместной обработки двух восстановленных результатов телеизмерений группы №2, которые подключены к соответствующим К входам блока контроля достоверности, К выходов каждого из которых подключены ко второй группе входов регистратора, состоящих из 2К входов, К выходов блока восстановления сжатых значений телеизмерений группы №2 соединены с соответствующими входами второй группы входов блока совместной обработки двух восстановленных результатов телеизмерений группы №2, дополнительный синхронизирующий выход декоммутатора подключен к объединенным синхронизирующим входам блоков восстановления сжатых значений телеизмерений групп №1 и №2, блока 12 декодирования данных телеизмерений группы №2, блока совместной обработки двух восстановленных результатов телеизмерений группы №2, блока контроля достоверности и регистратора, выход которого является выходом системы.
7. Система по п. 6 отличающаяся тем, что блоки блока восстановления сжатых значений телеизмерений групп №1 и №2 содержат: определитель разностей между соседними значениями переданного телеметрируемого параметра, два сумматора, два формирователя интервалов графических фрагментов, общий формирователь интервалов графических фрагментов с классификационными признаками разрывов 4-х типов, формирователь значений телеметрируемого параметра, восстановленных в исходных шкалах представления телеизмерений Шпред, формирователь значений телеметрируемого параметра, восстановленных в исходных шкалах телеизмерений ШТИ с идентификационными признаками разрывов, при этом каждый из N информационных входов блока восстановления сжатых значений телеизмерений группы №1 и каждый из К информационных входов блока восстановления сжатых значений телеизмерений группы №2 являются первыми входами определителя разностей между соседними значениями переданного телеметрируемого параметра соответствующих блоков, первый выход которого подключен к объединенным первым входам первого и второго сумматоров, а также первого и второго формирователей интервалов графических фрагментов, вторые входы каждого из которых соединены с объединенными знаковыми вторым и третьим выходами определителя разностей между соседними значениями переданного телеметрируемого параметра, соответственно, третьи входы первого и второго сумматоров объединены и подключены к информационному выходу определителя разностей между соседними значениями переданного телеметрируемого параметра, выходы первого и второго формирователей интервалов графических фрагментов подключены к соответствующим первому и второму входам общего формирователя интервалов графических фрагментов с классификационными признаками разрывов 4-х типов, основной выход которого подключен к объединенным четвертым входам первого и второго сумматоров, выходы которых соединены с первым и вторым входами формирователя значений телеметрируемого параметра, восстановленных в исходных шкалах представления телеизмерений Шпред, соответственно, выход которого подключен к основному входу формирователя значений телеметрируемого параметра, восстановленных в исходных шкалах телеизмерений ШТИ, к дополнительным четырем входам которого подключены дополнительные четыре выхода, соответствующие четырем возможным идентификационным признакам разрывов, выход формирователя значений телеметрируемого параметра, восстановленных в исходных шкалах телеизмерений ШТИ, является выходом соответствующих блоков восстановления сжатых значений телеизмерений групп №1 и №2.
| СПОСОБ ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2434301C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475861C1 |
| US 7348894B2, 25.03.2008 | |||
| US 7180943 B1, 20.02.2007. | |||

