Изобретение относится к телеметрии и может быть использовано в системах передачи данных по каналам связи при летных испытаниях (ЛИ) баллистических ракет (БР) и ракет-носителей (РН).
Особенность существующих способов передачи телеметрической информации (ТМИ) заключается в том, что формируемый групповой телеметрический сигнал (ГТС): GTS (s1, s2, …, sk1, sk2, …, ski, …, skM, …, sN), где s1, s2, …, sk1, sk2, …, ski, …, skM, …, sN - сообщения (данные телеизмерений) датчиков, количество N которых определяет заданная Программа телеизмерений (ПТИ), подвергают примитивной коррекции. Она заключена в том, что при каждом отделении телеметрируемого элемента конструкции ракеты из первоначального состава ГТС исключают данные телеизмерений тех датчиков, которые находились в отделившемся элементе конструкции ракеты. Коррекция заключена в том, что места в GTS (s1, s2, …, sN; sk1i, sk2i, …, skMi), тех датчиков ski={sk1i, sk2i, …, skMi}, которые выполнили свою основную функциональную задачу вместе с i-тым отделившимся элементом конструкции ракеты, заполняют «холостыми» словами, составленными, например, из двоичных символов «0», количество повторений которых равно разрядности данных отделившихся датчиков. В результате этого число символов двоичного кода в ГТС остается неизменным, при этом мощность и производительность передающего устройства фактически уменьшается из-за необходимости передачи несодержательных («холостых») символов двоичного кода. Это приводит к уменьшению эквивалентной энергетики бит eb оставшейся части ТМИ, которая относится к категории «содержательной». Уменьшению энергетики бит оставшейся содержательной части ТМИ способствует и увеличение с течением времени расстояния R между передающим и приемными устройствами, определяемое следующей зависимостью: eb=f(CR-2) (1), где C - величина, зависящая от мощности передающего устройства Pпрд, чувствительности приемника Епрм, коэффициентов усиления бортовой Купрд и наземной Купрм антенн, вида используемой модуляции сигналов Мс и условий распространения радиосигнала Ур. В условиях одного ЛИ С может считаться величиной постоянной.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключен в том, чтобы повысить достоверность передачи ТМИ ЛИ и штатной эксплуатации (ШЭ) ракетной и ракетно-космической техники (РКТ) на основе внесения изменений в технологию формирования ГТС при каждом отделении телеметрируемых элементов конструкции ракеты (ступеней и боковых двигателей ракеты, автономного блока разведения, разгонного блока, боеголовок и космического аппарата (КА)).
Технический результат достигается тем, что при отделении i-тых элементов конструкции ракеты места в ГТС, соответствующие исключенным из передачи сообщениям Ski={s1ki, s2ki, …, smki}, заменяют избыточными данными Хизб, сформированными по отношению к оставшимся сообщениям: GTS (s1, s2, …, sN; sk1(i+1), sk2(i+1), …, skM(i+1)). При этом соотношение  , называемое коэффициентом избыточности, во вновь сформированных сообщениях (s1=Хи1+Хизб1, s2=Хи2+Хизб2, …, sN=XuN+ХизбN; sk1(i+1)=Xuk1(i+1)+Xизбk1(i+1), sk2(i+1)=Хиk2(i+1)+Хизбk2(i+1), … skM(i+1)=XиkM(i+1)+Хизбk(i+1)), задают в соответствии с критерием, определяющим информационную ценность (значимость) i-того телеметрируемого параметра (ТМП). Чем выше информационная ценность sицj=Xицj+Хизбj, тем больше должен быть Кизбj.
, называемое коэффициентом избыточности, во вновь сформированных сообщениях (s1=Хи1+Хизб1, s2=Хи2+Хизб2, …, sN=XuN+ХизбN; sk1(i+1)=Xuk1(i+1)+Xизбk1(i+1), sk2(i+1)=Хиk2(i+1)+Хизбk2(i+1), … skM(i+1)=XиkM(i+1)+Хизбk(i+1)), задают в соответствии с критерием, определяющим информационную ценность (значимость) i-того телеметрируемого параметра (ТМП). Чем выше информационная ценность sицj=Xицj+Хизбj, тем больше должен быть Кизбj.
Известный способ цифровой передачи телеметрической информации (см. Кошевой А.А. Телеметрические комплексы летательных аппаратов. - М: Машиностроение, 1975, с.176-181 ([1])), выбранный в качества прототипа, предусматривает выполнение следующих операций:
формирование на передающей стороне с помощью датчиков телеметрируемых параметров (ТМП) формируется следующее множество источников информации: s1(t), s2(t), …, sN(t); sk1i(t), Sk2i(t), …, skMi(t), где знак i определяет принадлежность множества ТМП к i-тому элементу конструкции, совпадающему с порядком их отделения от ракеты;
формирование по каждому из них первичных телеметрических сигналов s1n(t), s2n(t), …, sNn(t); sk1in(t), Sk2in(t), …, skMin(t)) с динамическими диапазонами Dnj=22n значений, изменения которых с течением времени t с допустимой погрешностью εmax или погрешностями εmaxj, устанавливаемыми как для отдельных ТМП, так и для заранее сформированных их групп, совпадает с соответствующими контролируемыми физическими процессами;
формирование для каждой из них последовательности Sц(t)=ΣSц(t-iT∂) кодовых слов, содержащих 2n двоичных символов, путем аналого-цифрового преобразования первичных сигналов Snj(t), выполняемого с периодом T∂j дискретизации с шагом квантования d=Uш0/2n;
объединением сформированной последовательности Sц1n(t), Sц2n(t), … SцNn(t); Sцk1in(t), …, Sцk2in(t), …, SцkMin(t) кодовых слов в телеметрические кадры TKs, в которых устанавливается определенный порядок их следования, а он определяется кодами (синхросигналами) установленной конструкции, например М-последовательностями;
передачу последовательности следующих друг за другом телеметрических кадров TKs, TKs+1, TKs+2, …, TKs+h, где h=0, 1, 2, … по каналу связи на приемную сторону;
прием на приемной стороне полученной последовательности телеметрических кадров TKs, TKs+1, TKs+2, …, TKs+h и содержащихся в них кодовых слов Sц(t);
формирование на приемной стороне восстановленной последовательности выборок S∂j(t)=ΣSnj(t-iT∂) первичного сигнала путем такого преобразования принятой последовательности Sцj(t) кодовых слов, что значение каждой восстановленной выборки Snj(t-iT∂) первичного сигнала равно значению соответствующего принятого кодового слова Sцj(t-iT∂);
восстановление на приемной стороне первичного сигнала Snj(t) путем фильтрации полученной последовательности восстановленных выборок S∂j(t) первичного сигнала с помощью фильтра нижних частот с частотой среза Fcp=F∂/2=1/(2Т∂), равной половине частоты F∂ дискретизации.
Динамический диапазон Dцj=22n значений кодовых слов Xj, передаваемых по каналу связи согласно известному способу цифровой передачи информации, совпадает с динамическим диапазоном Dnj=22n значений первичного сигнала. Количество информации на одну передаваемую по каналу связи в цифровом виде выборку первичного сигнала при этом составляет Inj=log2(Dnj)=2n бит. Максимальное значение εмакс погрешности квантования передаваемых по каналу связи в цифровом виде выборок равно шагу квантования εмакс=d=Uш0/22n. При этом максимальное значение δмакс=εмакс/Uш0=1/22n относительной погрешности квантования при восстановлении на приемной стороне первичного сигнала обратно пропорционально динамическому диапазону Dn=22n значений первичного сигнала.
Недостатки известного способа цифровой передачи информации [1] заключаются в следующем:
- при отделениях телеметрируемых элементов конструкции ракеты из формируемого ГТС информационные кодовые слова, занимающие в телеметрических кадрах TKs известные порядковые номера и принадлежащие датчикам отделившихся элементов конструкции, заменяют «холостыми» символами двоичного кода «0», которые полезной информации не несут (цель такой замены заключается в том, чтобы длина телеметрических кадров и порядок следования кодовых слов-измерений остались неизменными, иначе условия цикличности опроса ТМП нарушаются);
- не обеспечиваются требуемые различные характеристики помехоустойчивости и точности передаваемых информационно-ценных ТМП.
Для исключения отмеченных недостатков в способ передачи телеметрической информации, заключающийся в том, что на передающей стороне формируют с помощью датчиков множество ТМП, изменение которых с течением времени с допустимыми погрешностями, устанавливаемыми как для отдельных ТМП, так и для заранее сформированных их групп, совпадает с соответствующими контролируемыми физическими процессами, формируют по каждому из них первичные телеметрические сигналы с заранее рассчитанными динамическими диапазонами, которые находят путем аналого-цифрового преобразования сформированных первичных сигналов, выполняемого с рассчитанным периодом дискретизации и с заданным шагом квантования, кодовые слова-измерения определенной разрядности объединяют в телеметрические кадры, начало которых задано синхросигналами, имеющими структуру представления кода, отличную от аналогичных показателей слов-измерений, и определяющими начало и установленный порядок следования данных телеизмерений различных датчиков, осуществляют передачу следующих друг за другом телеметрических кадров по каналу связи на приемную сторону и прием на приемной стороне полученной последовательности телеметрических кадров и содержащихся в них синхрослов и кодовых слов-измерений, формирование на приемной стороне восстановленной последовательности выборок первичного сигнала путем такого преобразования принятой последовательности кодовых слов, что значение каждой восстановленной выборки первичного сигнала равно значению соответствующего принятого кодового слова, введены следующие операции: на передающей стороне формируют две группы телеметрируемых параметров, при этом первая из них, называемая информационно-значимыми, составлена из данных телеизмерений датчиков, функционирование которых не связано с отделяющимися элементами конструкции ракеты, а вторую представляют данные, функционирование которых прекращается при отделении элементов конструкции ракеты, при отделении элементов конструкции ракеты вместе с датчиками телеизмерений, в формируемых телеметрических кадрах в места, ранее занимаемые измерениями отделившихся датчиков, подставляют избыточные проверочные символы, превращающие простые коды измерений оставшихся информационно-значимых телеметрируемых параметров в помехоустойчивые, обладающие способностью обнаруживать и исправлять ошибки передачи данных, при этом количество проверочных символов равно числу символов слов-измерений, принадлежащих ко второй группе телеметрируемых параметров, которые были исключены из передачи при отделении телеметрируемых элементов конструкций ракеты, в результате чего длина телеметрических кадров остается постоянной, при приеме ТМИ определяют моменты изменения полярностей результатов обработки синхросигналов, которые связаны с моментами времени изменения заранее рассчитанных режимов формирования и передачи данных, определяемые при этом моменты времени используют для выбора алгоритма обнаружения ошибок передачи и их исправления, который соответствует действующему режиму формирования и передачи данных, установленному на борту ракеты.
Предлагаемый способ передачи телеметрической информации позволяет полезно использовать такое объективное свойство передаваемых данных телеизмерений, как естественное увеличение количества передаваемых «холостых» символов и слов, появляющееся при использовании известных способов передачи ТМИ в результате отделения телеметрируемых элементов конструкции ракеты. Заполнение телеметрических кадров «холостыми» символами и словами приводит к уменьшению возможных резервов, которые могли бы быть использованы для передачи содержательной информации в условиях заданной ограниченной полосы пропускания канала связи. В результате этого бесполезно расходуются ресурсы бортовой радиотелеметрической системы (БРТС), значительно уменьшается энергетика бит и повышается вероятность их искажений.
При использовании предлагаемого способа места «холостых» символов и слов замещают дополнительными проверочными символами выбранного помехоустойчивого кода, в результате чего ошибки передаваемых данных можно обнаруживать и исправлять. При этом повышают эквивалентную энергетику бит и уменьшают вероятность их искажений.
На фиг.1 представлен график зависимости вероятности искажения бит ГТС (Pb), принимаемого наземной приемно-регистрирующей станцией (НПРС), в зависимости от наклонной дальности радиолинии (R) при использовании существующего и предлагаемого способов передачи ТМИ. Известно [1], что энергетика радиолинии уменьшается обратно пропорционально квадрату расстояния между контролируемым объектом и приемной станцией (формула 1). Из приведенной иллюстрации следует, что из-за уменьшения энергетики радиолинии зона «неуверенного» приема ТМИ, соответствующая, вероятности искажения бит Рб=10-3, наступает при наклонной дальности, равной, например, 1600 км. В результате использования предлагаемого способа при отделении первой, второй и третьей ступеней ракеты «холостые» слова заменяют информационными и проверочными кодовыми конструкциями, позволяющими обнаруживать и исправлять ошибки передачи. В этом случае эквивалентная энергетика передаваемых бит ebэ увеличивается скачком. На фиг.1 представлен график изменения вероятности искажения бит, которая находится в обратной зависимости от эквивалентной энергетики передаваемых бит ebэ. Поэтому уменьшается скачком при отделении ступеней ракеты и вероятность искажения бит Pb. При этом эквивалентная энергетика передаваемых бит ebэ отличается от энергетики бит простого двоичного кода eb тем, что при ее расчете учитывают исправляющую способность корректирующего кодирования оставшейся части ТМИ.
В результате этого при применении предлагаемого способа, как показывают расчеты, произведенные на основе реальных данных, зона «неуверенного» приема, характеризующаяся Рб=10-3, для случая, проиллюстрированного на фиг.1, появится не ранее, чем при наклонной дальности, равной 3200 км, что вдвое больше аналогичного показателя при использовании традиционного подхода к передаче ТМИ.
Возможность устранения «холостых» слов на основе перехода к другим нециклическим способам формирования телеметрических кадров, что, например, реализовано в пакетной телеметрии, противоречит требованиям передачи все непрерывно растущих объемов данных в условиях ограничений на время передачи ТМИ. Так, например, при пакетной телеметрии объем служебной информации бортовой информационно-телеметрической системы (БИТС) «Пирит», необходимой для обратного восстановления ТМИ на приемной стороне, достигает 48% от общего объема передаваемых данных (см. «Современная телеметрия в теории и на практике. / Учебный курс», СПб.: Наука и Техника, 2007. - 672 с., стр.469 ([2])), в то время как в лучших образцах БРТС с циклическим опросом ТМП данный показатель не превышает 1,7%. В результате этого при существующих ограничениях на пропускную способность радиоканалов обеспечивается передача максимума содержательной информации. Поэтому, например, при испытаниях БР и РН применяют только БРТС с циклическим опросом ТМП.
Предлагаемый способ способствует разрешению основного противоречия телеизмерений при летных испытаниях БР и РН между растущими объемами передаваемой ТМИ, с одной стороны, и ограниченной пропускной способностью радиоканалов передачи данных телеизмерений, с другой. Применение способа приводит к увеличению эквивалентной (кажущейся) энергетики бит, хотя истинные физические ее показатели, определяемые мощностью передатчика, чувствительностью приемника и коэффициентами направленного действия антенн, остаются неизменными.
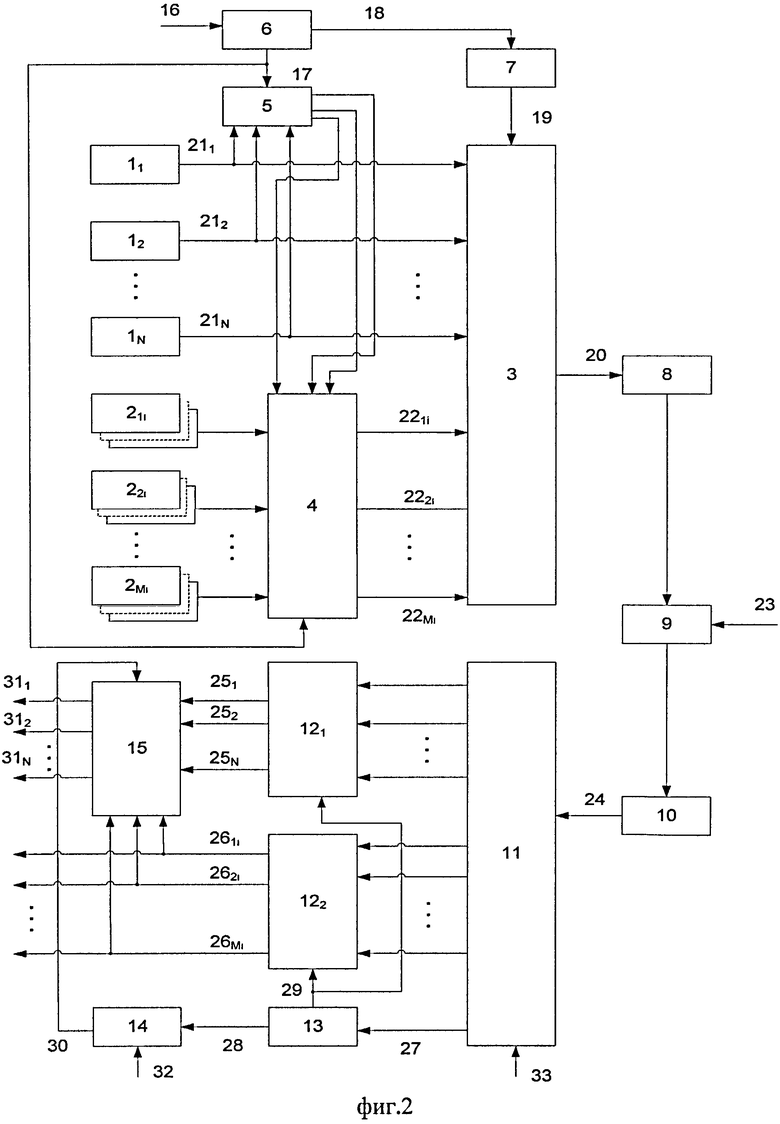
На фиг.2 представлена структурная схема системы передачи телеметрической информации, реализующей предлагаемый способ.
Система передачи информации, адаптированная к неравномерности потока данных телеизмерений, на передающей стороне содержит блоки 11, 12, …, 1N формирования основных (информационно-значимых) телеметрируемых параметров и блоки 21i, 22i, …, 2Mi формирования дополнительных телеметрируемых параметров, относящихся к i=1, 2, …, S отделяемым телеметрируемым элементам ракеты, соответственно, N выходов 211, 212 …, 21N блоков 11, 12 …, 1N формирования основных телеметрируемых параметров подключены к соответствующим входам коммутатора 3 непосредственно, a Mi выходов блоков 21i, 22i, …, 2Mi формирования дополнительных телеметрируемых параметров подключены к соответствующим Mi входам 221i, 222i, …, 22Mi коммутатора 3 через блок 4 переключения режима формирования данных телеизмерений, N дополнительных входов которого соединены с соответствующими выходами блока 5 формирования проверочных символов, N входов которого объединены с соответствующими выходами 211, 212 …, 21N блоков 11, 12 …, 1N формирования основных телеметрируемых параметров, а управляющий (N+1) вход - объединен с управляющим входом блока 4 переключения режима формирования данных телеизмерений и подключен к первому выходу 17 первого блока 6 управления, имеющему управляющий вход 16 задания режимов переключений, второй выход 18 которого подключен через блок 7 формирования синхросигналов к дополнительному входу 19 коммутатора 3, выход 20 которого через передатчик 8 и канал связи 9, подверженный помехам 23, подключен ко входу приемника 10, выход 24 которого соединен со входом декоммутатора 11 каналов передачи, имеющего управляющий вход 33, первая группа из N выходов которого подключена через первый декодер 121 к соответствующим входам 251, 252 …, 25N блока 15 обнаружения и исправления ошибок, вторые Mi входов 261i, 262i, …, 26Mi которого подключены через второй декодер 122 к соответствующей второй группе выходов декоммутатора 11 каналов передачи, дополнительный выход 27 которого соединен через блок 13 идентификации режимов переключений, имеющий выход 28, и второй блок 14 управления с управляющим входом 30 блока 15 обнаружения и исправления ошибок, при этом второй вход 32 второго блока 14 управления является входом задания режимов переключений, второй выход 29 блока 13 идентификации режимов переключений соединен с объединенными управляющими входами первого 121 и второго 122 декодера, Mi выходов 261i, 262i, …, 26Mi последнего и N выходов 311, 312 …, 31N блока 15 обнаружения и исправления ошибок являются выходами системы.
Для реализации способа все множество телеметрируемых параметров разбивают на две группы: основную, содержащую N ТМП, и дополнительную, состоящую из 21i, 22i, …, 2Mi дополнительных ТМП, относящихся к i=1, 2, …, S отделяемым телеметрируемым элементам ракеты (фиг.2). В первую из них входят параметры, которые подлежат контролю в течение всего времени полета ракеты. Вторая группа ТМП принадлежит датчикам, установленным на конструкциях ракеты, которые отделяются в процессе ее полета. Их данные представляют интерес до момента их отделений от системы телеизмерений вместе с отделившимися элементами ракеты. Классификацию ТМП по группам производят на основе Программы телеизмерений при подготовке ракеты к пуску, а ее результаты записывают в память первого 6 и второго 14 блоков управления, а также в память декоммутатора 11 каналов передачи по управляющему входу 33.
На начальном этапе полета ракеты во время работы двигателя первой ступени объем передаваемой ТМИ наибольший. Вся система телеизмерений ориентирована на обеспечение его передачи: задается требуемая структура формирования слов-измерений и телеметрических кадров, в некоторых БРТС используют многопозиционное кодирование ([2], стр.246). При многопозиционном кодировании требуемые показатели помехоустойчивости обеспечивают за счет того, что расстояния между ракетой и телеметрическими станциями, которые принимают ТМИ, небольшие, поэтому энергетика бит превышает уровень, при котором качество приема соответствует требуемым значениям.
После отделения первой ступени (i=1) и исключения из передачи дополнительных телеметрируемых параметров (ТМП), обозначенных на фиг.2 как 211, 221, …, 2M1, формируемые телеметрические кадры для обеспечения надежности и простоты их приема должны остаться неизменными по количеству содержащихся в них символов кода. Для этого при существующей практике места в телеметрических кадрах, которые ранее занимали данные телеизмерений датчиков отделившихся элементов конструкции, заполняют «холостыми» символами, например символами «0» двоичного кода. Такие кодовые конструкции, состоящие из «холостых» символов «0», также называются «холостыми», поскольку они не являются переносчиками содержательной информации.
При использовании предлагаемого способа «холостые» слова заменяются информационными символами, которые по отношению к оставшимся телеметрируемым параметрам ракеты являются избыточными (проверочными), позволяющими обнаруживать и исправлять ошибки передачи ТМИ.
Система передачи информации (фиг.2), реализующая предлагаемый способ, функционирует следующим образом.
Данные от источников информации (11, 12, …,1N), представляющие собой основную группу ТМП s1(t), s2(t), …, SN(t) и множество ТМП (21i, 22i, …, 2Mi), относящихся к отделяемым элементам конструкции ракеты: sk1i(t), sk2i(t), …, skMi(t), где знак i определяет принадлежность множества ТМП к i-тому элементу конструкции, поступают на соответствующие входы коммутатора 3. В коммутаторе 3 формируют групповой телеметрический сигнал в следующей последовательности: GTS (s1, s2, …, sN; sk1i, sk2i, skMi)). Начало каждого кадра маркируется синхрословом, структура которого задается блоком 7 формирования синхросигналов. В качестве синхросигналов в современных БРТС используют М-последовательности, структура которых и разрядность n задаются при подготовке к пуску БР и запуску РН. Также при этом в постоянную память блоков управления 6 и 14 записывают данные о расчетных значениях времен отделения ступеней ракеты. В ходе полета от комплекса командных приборов (ККП) системы управления ракеты поступают на вход 16 команды на отделения ступеней, которые при их совпадении с расчетными временными интервалами, записанными в постоянную память блока 6, проходят на управляющий вход 17 блока 5 формирования проверочных символов и вход 18 блока 7 формирования синхросигналов. При этом в блоке 5 формируют проверочные символы для слов-измерений оставшихся информационно-значимых ТМП, которые в блоке 4 переключения режима формирования данных телеизмерений подставляют на места, которые ранее заполняли «холостыми» символами. При этом в блоке 7 формирования синхросигналов символы синхрослова (символы М-последовательности) заменяют на противоположные по отношению к предыдущему режиму передачи ТМИ.
Сформированный групповой телеметрический сигнал (ГТС) с выхода коммутатора 3 поступает на вход 20 передатчика 8, где его подвергают модуляции и последующей передаче по каналу связи 9, подверженному действию помех 23. В приемнике 9 производят демодуляцию переданного ГТС и выделение синхрослов. Далее в соответствии с Программой телеизмерений, записанной до пуска по управляющему входу 33 в декоммутатор 11, производят декоммутацию ТМП. При этом выделенные N основных ТМП поступают в первый декодер 121, а оставшиеся Mi ТМП - во второй декодер 122 двоичных слов. Кроме того, на выходе 27 декоммутатора 11 на основе определения типа представления синхросигнала, условно называемого как «прямой» и «инверсный», формируют управляющий сигнал в блоке 13 идентификации режимов переключений. При его наличии во втором декодере 122 выделяют те символы двоичных слов, которые были подставлены вместо «холостых» кодовых конструкций. Одновременно на выходе 28 блока 13 идентификации режимов переключений формируют сигнал, поступающий на второй вход второго блока 14 управления, подтверждающий факт изменения порядка функционирования системы формирования данных. Для подтверждения достоверности смены режима передачи ТМП - во втором блоке 14 управления моменты времени замены символов синхрослова на противоположные сравнивают с запланированным временным интервалом отделения соответствующего элемента конструкции ракеты. Расчетные данные на этапе подготовке ракеты к пуску записывают в память блоке 14 управления, используя вход 32. При отсутствии противоречий на выходе 30 блока 14 формируют управляющий сигнал, после получения которого блок 15 обнаружения и исправления ошибок переходит к очередной операции обнаружения и исправления ошибок значений основной группы информационно-значимых ТМП. Во время работы первой ступени ракеты блок 15 используют как ретранслятор данных, полученных на выходах 251, 252, …, 25N первого декодера 121. К операции коррекции ошибок блок 15 приступает после отделения первой ступени. При каждом новом изменении режима формирования и передачи ТМИ его корректирующая способность усиливается, поскольку все большее количество проверочных символов начинает поступать со второго декодера 122. В результате этого помехоустойчивость восстановления основной (информационно-значимой) группы ТМП повышается, благодаря чему частично компенсируется потеря естественной энергетики бит при увеличении расстояния между контролируемым объектом и приемной станцией.
Основу управления изменением режимов функционирования приемной системы получения ТМИ в предлагаемом способе составляет замена «прямого» отображения символов слов синхронизации на противоположное «инверсное» их представление.
В современных телеметрических системах для синхронизации телеметрических кадров используют М-последовательности. Например, в одной из существующих новых отечественных телеметрических систем в качестве синхрослова используют 15-разрядную М-последовательность следующего вида ([2], стр.458-463):
Результаты ее корреляционной обработки при приеме ТМИ представлены в таблицах 1 и 2. При этом в таблице 1 рассмотрен случай представления М-последовательности и ее обработки в прямом виде, что соответствует, например, временному интервалу работы первой ступени ракеты. В таблице 2 приведены аналогичные операции, но для М-последовательности, представленной в инверсном виде, что имеет место при смене режимов работы БРТС. На новый режим передачи данных ТМИ, например, переходят при отделении первой ступени и включении двигателя второй ступени ракеты по команде, получаемой от системы управления ракетой. При этом в бортовой радиотелеметрической системе (БРТС) М-последовательность, представленную, например, в прямом виде, заменяют на инверсную (обратную) М-последовательность.
В первом случае в результате оптимального приема формируют основной положительный импульс, во втором случае он является отрицательным. Смена полярности при приеме синхросигналов свидетельствует о том, что на приемной стороне необходимо осуществить переход на новый режим декоммутации и идентификации переданных данных.

Пояснения к таблице 1.
В нулевой (вспомогательной) строке таблицы 1 записывают 15-разрядные фрагменты кодовой последовательности цифрового группового телеметрического сигнала (ГТС) в том виде, в котором она принята приемной системой. При этом в нулевом (вспомогательном) столбце таблицы 1 ее записывают в обратном порядке (от конца к началу), а данные корреляционной обработки 15-разрядных фрагментов кодовой последовательности ГТС представляют в виде матрицы, имеющей размерность 15×15. Если в нулевом (вспомогательном) столбце таблицы 1 стоит символ «1», то значения 15-разрядных фрагментов кодовой последовательности ГТС записанной строки записывают в прямом виде, при котором символу «1» соответствует «+», а символу «0» - «-». Если же в нулевом (вспомогательном) столбце таблицы 1 стоит символ «0», то устанавливают обратное соответствие: «0»→«+» и «1»→«-», Каждый последующий этап обработки отличается от предыдущего тем, что происходит сдвиг 15-разрядных фрагментов кодовой последовательности ГТС на один символ. Заключительный этап обработки заключается в том, что символы суммируются в каждом столбце матрицы. В случае синхрослова это приводит к максимуму на уровне последнего (15-го) разряда.

Пояснения к таблице 2.
Обработка пятнадцатиразрядной М-последовательности, представленной в инверсном виде (таблица 2), осуществляются так же, как и в случае, рассмотренном в таблице 1. Но результат обработки будет отличаться тем, что максимальный суммарный импульс будет не положительным, а отрицательным.
Такой способ передачи синхрослов приводит к возможности восстановления циклограммы полета ракеты, при котором синхросигналы помимо решения основной задачи - декоммутации ТМП, могут быть использованы и по другому назначению, например для восстановления циклограммы полета ракеты. Ранее для решения этой задачи использовались только телеметрируемые параметры сигнализации (ТПС). Однако они подключались к основному коммутатору БРТС через локальные коммутаторы, поэтому частота их опроса не могла быть выше той группы медленно меняющихся параметров (ММП), которая могла быть обеспечена локальным коммутатором. В результате этого погрешность их временной привязки была большой.
Погрешность временной привязки моментов инвертирования символов синхрослова существенно меньше, так как частота их следования определяется частотой опроса не локального, а основного коммутатора БРТС.
Кроме того, повторение моментов отделения ступеней ракеты на уровне синхросигналов повышает показатели надежности и идентификации моментов времени срабатывания ТПС.
Кроме того, смена полярности результатов обработки синхрослов может быть использована и для повышения точности временной привязки результатов сигналов и данных при разнесенном приеме ТМИ станциями различных измерительных пунктов, поскольку появляется единая для всех пространственно разнесенных станций метка события, произошедшего на борту контролируемого объекта. Ранее, например, такую метку вводили целенаправленно на уровне данных основного коммутатора для обеспечения совместной обработки навигационной и телеметрической информации.
При применении изобретения будет обеспечено повышение энергетики на передаваемых бит ТМИ на 5-10 дБ при каждом отделении телеметрируемых элементов конструкции ракеты на основе внесения следующих изменений в технологию формирования ГТС: вместо прекративших свою работу датчиков в освободившиеся места в ГТС телеметрических кадров подставляются избыточные проверочные символы помехоустойчивого кода по отношению к той части информационно-ценных ТМП, эквивалентную энергетику которых необходимо повысить до установленных расчетных значений.
Для большей наглядности графики изменения во времени вероятности искажения бит (Pb) на фиг.1 разнесены по вертикальной оси. Такое отображение имеет под собой следующее обоснование: при моделировании помимо предлагаемого способа была использована новая нетрадиционная технология модуляции несущей радиосигнала ([3], заявка на изобретение №2011131746 от 29.07.2011 г.). Эффект от замены «холостых» слов-измерений при отделении только первой и второй ступеней ракеты заключается в уменьшении вероятности искажения бит на порядок.
Проведенное моделирование применительно к реальным условиям пуска РН показывает, что при использовании предлагаемого способа зона уверенного приема данных телеизмерений одной телеметрической станцией будет повышена не менее чем в 2 раза при неизменных прочих условиях (мощности излучения сигналов, модели помех и условий приема).
Еще более значимым технический эффект будет при пусках баллистических ракет, так как при этом условия приема ТМИ существенно хуже. При пусках МБР и БРПЛ модель радиоканала предполагает, что вероятность искажения бит может принимать значения P3=10-1. И это связано с тем, что сама баллистическая ракета является мощным источником помех для приема ТМИ, передаваемой с ее борта.
Таким образом, в результате применения предлагаемого способа достигается комплексный положительный технический результат, проявляющийся в возможности существенного повышения помехоустойчивости передачи ТМИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480840C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2586605C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| СПОСОБ СКРЫТОЙ ЗАЩИЩЕННОЙ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКИХ ДАННЫХ В РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСАХ | 2020 |
|
RU2765811C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ОБНАРУЖЕНИЕМ И ИСПРАВЛЕНИЕМ ОШИБОК ПЕРЕДАЧИ | 2017 |
|
RU2658795C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2739335C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475861C1 |
Изобретение относится к телеметрии и может быть использовано в системах передачи данных по каналам связи при летных испытаниях баллистических ракет (БР) и ракетно-космической техники (РКТ). Технический результат состоит в повышении помехоустойчивости передачи данных на основе адаптации бортовой радиотелеметрической системы (БРТС) к неравномерности потока передаваемой телеметрической информации (ТМИ), появляющейся из-за отделения телеметрируемых элементов конструкции ракеты. Новизна предлагаемого способа заключается в том, что на передающей стороне формируют две группы телеметрируемых параметров. Одна из них, называемая информационно-значимыми, составлена из данных телеизмерений датчиков, функционирование которых не связано с отделяющимися элементами конструкции ракеты. Вторую группу представляют данные, передачу которых прекращают при отделении элементов конструкции ракеты. Вместо них подставляют избыточные проверочные символы, превращающие данные измерений оставшихся информационно-значимых телеметрируемых параметров в помехоустойчивые коды. В результате этого исключают передачу холостых слов, не несущих содержательную информацию, потребность в которых связана с необходимостью сохранения неизменного числа символов передаваемого кода в телеметрических кадрах в системах с временным разделением каналов. 2 н.п. ф-лы, 2 ил., 2 табл.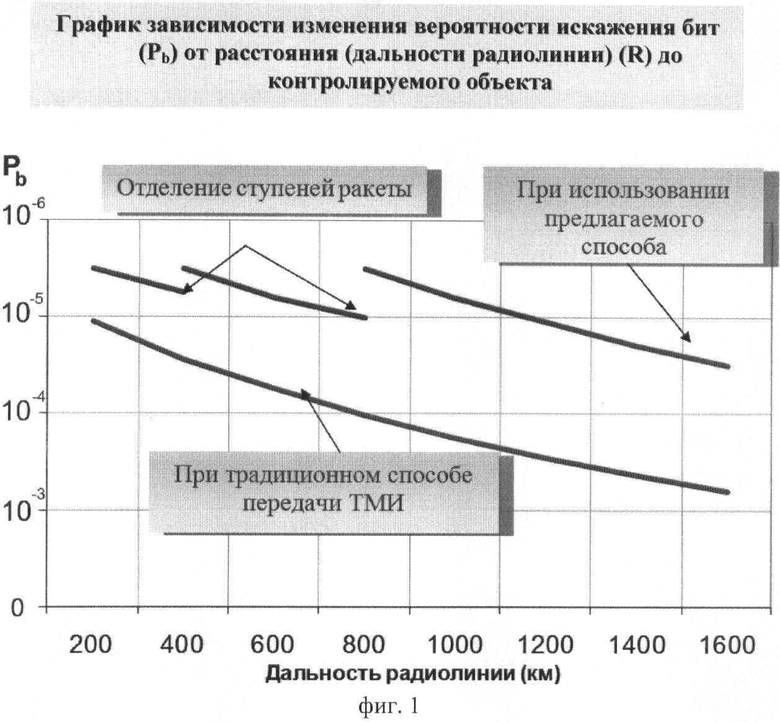
1. Способ передачи телеметрической информации, заключающийся в том, что на передающей стороне формируют с помощью датчиков множество телеметрируемых параметров (ТМП), изменение которых с течением времени с допустимыми погрешностями, устанавливаемыми как для отдельных ТМП, так и для заранее сформированных их групп, совпадает с соответствующими контролируемыми физическими процессами, формируют по каждому из них первичные телеметрические сигналы с заранее рассчитанными динамическими диапазонами, которые находят путем аналого-цифрового преобразования сформированных первичных сигналов, выполняемого с рассчитанным периодом дискретизации и с заданным шагом квантования, кодовые слова-измерения определенной разрядности объединяют в телеметрические кадры, начало которых задано синхросигналами, имеющими структуру представления кода, отличную от аналогичных показателей слов-измерений, и определяющими начало и установленный порядок следования данных телеизмерений различных датчиков, осуществляют передачу следующих друг за другом телеметрических кадров по каналу связи на приемную сторону и прием на приемной стороне полученной последовательности телеметрических кадров и содержащихся в них синхрослов и кодовых слов-измерений, формирование на приемной стороне восстановленной последовательности выборок первичного сигнала путем такого преобразования принятой последовательности кодовых слов, что значение каждой восстановленной выборки первичного сигнала равно значению соответствующего принятого кодового слова, отличающийся тем, что на передающей стороне формируют две группы телеметрируемых параметров, при этом первая из них, называемая информационно-значимой, составлена из данных телеизмерений датчиков, функционирование которых не связано с отделяющимися элементами конструкции ракеты, а вторую представляют данные, функционирование которых прекращается при отделении элементов конструкции ракеты, при отделении элементов конструкции ракеты вместе с датчиками телеизмерений, в формируемых телеметрических кадрах в места, ранее занимаемые измерениями отделившихся датчиков, подставляют избыточные проверочные символы, превращающие простые коды измерений оставшихся информационно-значимых телеметрируемых параметров в помехоустойчивые, обладающие способностью обнаруживать и исправлять ошибки передачи данных, при этом количество проверочных символов равно числу символов слов-измерений, принадлежащих ко второй группе телеметрируемых параметров, которые были исключены из передачи при отделении телеметрируемых элементов конструкций ракеты, в результате чего длина телеметрических кадров остается постоянной, при приеме ТМИ определяют моменты изменения полярностей результатов обработки синхросигналов, которые связаны с моментами времени изменения заранее рассчитанных режимов формирования и передачи данных, определяемые при этом моменты времени используют для выбора алгоритма обнаружения ошибок передачи и их исправления, который соответствует действующему режиму формирования и передачи данных, установленному на борту ракеты.
2. Система передачи информации, адаптированная к неравномерности потока данных телеизмерений, содержащая на передающей стороне N блоков формирования основных (информационно-значимых) телеметрируемых параметров и Мi блоков формирования дополнительных телеметрируемых параметров, относящихся к i=1, 2, …, S отделяемым телеметрируемым элементам ракеты, соответственно выходы каждого из блоков формирования основных телеметрируемых параметров подключены к первой группе из N входов коммутатора непосредственно, а Mi выходов блоков формирования дополнительных телеметрируемых параметров подключены к другой группе входов коммутатора, состоящей из Mi входов, дополнительный вход коммутатора соединен с выходом блока формирования синхросигналов, а его выход подключен ко входу передатчика, содержащая на приемной стороне приемник, выход которого соединен со входом декоммутатора каналов передачи, (N+Mi) выходов которого через блок декодирования подключены к выходу системы, отличающаяся тем, что на передающей стороне введены первый блок управления, блок переключения режима формирования данных телеизмерений, блок формирования проверочных символов, а на приемной стороне второй блок управления, блок декодирования с (N+Mi) входами и выходами разделен на два декодера с числом входов и выходов, равным N, и Mi соответственно, блок идентификации режимов переключений, блок обнаружения и исправления ошибок, при этом Mi выходов блоков формирования дополнительных телеметрируемых параметров подключены к соответствующим Mi входам второй группы входов коммутатора через блок переключения режима формирования данных телеизмерений, N дополнительных входов которого соединены с соответствующими выходами блока формирования проверочных символов, N входов которого объединены с выходами соответствующих блоков формирования основных телеметрируемых параметров, а управляющий (N+1) вход объединен с управляющим входом блока переключения режима формирования данных телеизмерений и подключен к первому выходу первого блока управления, имеющему управляющий вход задания режимов переключений, второй выход которого подключен через блок формирования синхросигналов к дополнительному входу коммутатора, выход которого через передатчик и канал связи подключен ко входу приемника, выход которого соединен со входом декоммутатора каналов передачи, имеющего управляющий вход, первые N выходов которого соединены через первый декодер с соответствующими входами блока обнаружения и исправления ошибок, вторые Mi входов которого соединены через второй декодер с соответствующими выходами декоммутатора каналов передачи, дополнительный выход которого соединен через блок идентификации режимов переключений и второй управляющий блок с управляющим входом блока обнаружения и исправления ошибок, второй вход второго блока управления является входом задания режимов переключений, второй выход блока идентификации режимов переключении соединен с объединенными управляющими входами первого и второго декодеров, Mi выходов последнего и N выходов блока обнаружения и исправления ошибок являются выходами системы.
| Телеизмерительная система | 1979 |
|
SU805380A1 |
| СИСТЕМА ЦИФРОВОГО ТЕЛЕВИДЕНИЯ | 2001 |
|
RU2208917C2 |
| CN 101031036 A, 05.09.2007 | |||
| US 4979041, 18.12.1990. | |||

