Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи данных по каналам связи. Его использование позволяет повысить достоверность передачи информации без введения структурной избыточности в передаваемые сообщения, обнаруживать возникающие при передаче ошибки, как одиночные, так и кратные, повысить скорость передачи информации.
Это достигается путем структурно-алгоритмических преобразований (САП), которые осуществляют при передаче телеметрической информации (ТМИ) на борту контролируемого объекта (в этом случае САП называют «прямыми» (ПСАП)) и при ее приеме (реализуемые при этом САП называют «обратными» (ОСАП)).
Наиболее близким к предлагаемому изобретению является способ дискретной передачи информации ([1], патент RU №2434301 от 20.11.2011, бюл. №32). В нем также в результате структурно-алгоритмических преобразований (САП), предшествующих передаче информации, формируют последовательность слов-измерений или сообщений, называемых «выборками первичных сигналов», которые преобразуют в выборки с меньшей разрядностью представления исходных значений. Сформированные выборки с меньшей разрядностью представления исходных значений являются образами-остатками bi. Основу изобретения [1] составляет замена традиционного позиционного представления слов двоичных 2n-разрядных слов-измерений X на их отображение образами-остатками bi. В соответствии с математической моделью образы-остатки bi. получают в результате выполнения операций, соответствующих делению X на определенным образом выбранные модули сравнения mi. В результате этого обеспечивают выполнение требований тождественного равенства исходного сообщения X
и его образа-остатка bi, получающего в результате операции, эквивалентной арифметической операции деления Х на модуль сравнения mi:

Таким образом, способ [1] представляет собой инженерную интерпретацию математической модели (1).
Способ-прототип [1] заключается в том, что на передающей стороне формируют первичный сигнал, шкала значений которого в 22n раз превышает максимально допустимое значение погрешности, формируют последовательность выборок первичного сигнала путем его дискретизации с выбранной частотой опроса, формируют последовательность передаваемых выборок путем преобразования последовательности выборок первичного сигнала, передают сформированную последовательность выборок по каналу связи на приемную сторону, на приемной стороне принимают полученную последовательность выборок, формируют восстановленную последовательность выборок первичного сигнала путем преобразования принятой последовательности выборок, восстанавливают первичный сигнал путем фильтрации последовательности выборок первичного сигнала, отличающийся тем, что на передающей стороне преобразование последовательности выборок первичного сигнала в последовательность передаваемых выборок осуществляют следующим образом: формируют 2n равномерно распределенных в пределах шкалы значений первичного сигнала пороговых уровней ui, сравнивают значение каждой выборки первичного сигнала со значениями всех пороговых уровней, определяют значение максимального из превышенных пороговых уровней, преобразуют значение каждой выборки первичного сигнала путем вычитания из него значения максимального из превышенных пороговых уровней, при этом на приемной стороне преобразование принятой последовательности выборок в восстановленную последовательность выборок первичного сигнала осуществляют следующим образом: определяют приращение значения каждой принятой выборки
путем вычитания из него значения предшествующей принятой выборки, формируют минимальный ненулевой пороговый уровень, значение которого в 2n раз меньше шкалы значений первичного сигнала, сравнивают модуль приращения значения каждой принятой выборки с половиной значения минимального ненулевого порогового уровня, при превышении модуля приращения значения каждой принятой выборки половины значения минимального ненулевого порогового уровня и при отрицательном значении указанного приращения значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки, значения предшествующей восстановленной выборки первичного сигнала и значения минимального ненулевого порогового уровня, при превышении модуля приращения значения каждой принятой выборки половины значения минимального ненулевого порогового уровня и при положительном значении указанного приращения значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки и значения предшествующей восстановленной выборки первичного сигнала и вычитания из полученной суммы значения минимального ненулевого порогового уровня, при превышении половины значения минимального ненулевого порогового уровня модуля приращения значения каждой принятой выборки значение каждой восстановленной выборки первичного сигнала определяют путем суммирования приращения значения соответствующей принятой выборки и значения предшествующей восстановленной выборки первичного сигнала [1].
Отличительная особенность известного способа [1] заключается в том, что вместо математической операции сравнения значений результатов измерений X по модулю mi, предполагающей операцию деления и нахождения образов-остатков bi, используют результаты превышения значениями X пороговых уровней ui. При превышении каждого из пороговых уровней
непрерывный счет значений сообщений X по мере их возрастания или убывания обрывают и возобновляют с 0. Поэтому получающиеся значения оказываются ограниченными по уровню значением разности между порогами Δui=uj+1-ui, что эквивалентно образам-остаткам bi, которые были бы получены в результате арифметической операции деления. Это означает, что сформированные таким образом значения от 0 до (Δui-1) совпадают со значениями образов-остатков bi при условии, что Δui=mi. Такая формулировка модели (1) на инженерном языке позволила определить новый способ восстановления выборок или слов-измерений при приеме сообщений. Он описан в формуле изобретения [1], когда рассматривается приемная сторона. Однако замена модулей mi. разностями между порогами сравнения Δui. оказывается сложной при большом числе используемых модулей сравнения. В результате этого возможности инженерного синтеза новых способов восстановления данных измерений при использовании структурно-алгоритмических преобразований (САП) становятся все более ограниченными по мере увеличения числа различных модулей сравнения mi.
В этом случае более полезным с точки зрения реализации новых идей повышения помехоустойчивости передаваемых данных становится математический синтез новых технических решений на основе модели, представленной в виде системы остаточных классов (СОК) (системы сравнений, определяемой формулой (2)):

где Xj - j-тое слово-измерение (сообщение);
m1, m2 - модули сравнения, если n - половина исходной разрядности N=2n (разрядной сетки) представления исходных традиционных слов-измерений, то случай оптимального их выбора представлен значениями m1=2n-1, m2=2n+1;
b1j, b2j - образы-остатки слова-измерения (сообщения) Xj, полученные в результате операции деления Xj на модули сравнения m1 и m2, соответственно.
Так, в случае исходного байтового представления слов-измерений (2n=8) m1=24-1=15, а m2=24+1=17. Если 2n=10, что соответствует случаю 10-тиразрядного представления значений телеметрируемых параметров (ТМП), то m1=25-1=31, а m2=25+1=33. Сформированные при таком подходе образы-остатки для однозначного их отображения могут иметь n - разрядную позиционную структуру представления. Однако некоторое исключение из этого правила составляют результаты кодирования образов-остатков, полученных при сравнении по модулям m2=2n+1.
При предлагаемом дополнительном кодировании новые сообщения получают в результате замены исходных значений Xj, j=0, 1, 2, 3, … на сообщения Cj, j=0, 1, 2, 3, …, составленные, например, из значений образов-остатков

Здесь подстрочные индексы s (< >10 и < >2) определяют систему счисления - десятичную и двоичную, соответственно.
Например, если первое значение слова-измерения равно: Х1=<116>10=<01110100>2 при восьмиразрядном представлении двоичного кода (2n=8), то при модулях сравнения mod 15 и mod 17 результатом дополнительного помехоустойчивого кодирования будет значение С1⇔<b11(mod 15),b21(mod 17)>s,s=2,10. В рассматриваемом случае это значение С1=<10111110>2=<190>10. Первый подчеркнутый образ-остаток равен: b11=<1011>2=<11>10, что соответствует результату деления значения 116 на модуль сравнения 15: 116=15×7+11. Второй четырехразрядный образ-остаток (n=4) b21=<1110>2=<14>10, что соответствует результату деления значения 116 на модуль сравнения 17: 116=17×6+14.
Таким образом, при традиционном способе передачи информации значению Xj может быть поставлен в полное соответствие его эквивалент в виде: m1×l1+b1j или в виде: m2×l2+b2j, где m1, m2 - модули сравнения, a l1, l2 - значения неполных частных, получающихся при делении.
При представлении данных их образами-остатками (2) передаче подлежат только значения b1j и b2j, при этом информация о m1, m2 и о l1, l2 из передачи исключается. В этом случае ml, m2 могут рассматриваться как ключевые данные, известные пользователю, а l1, l2, как данные, которые восстанавливают при приеме на основе принятых значений образов-остатков b1j и b2j.
Результат дополнительного кодирования C1 представляет, таким образом, сжатую форму представления передаваемых данных, поскольку в новых закодированных значениях отсутствует информация о модулях сравнения m1 m2 и «неполных частных» l1, l2, равных, например, при m1=15 и m2=17, l1=7 и l2=6, соответственно. При традиционном кодировании информация о m1=15 и m2=17 и о «неполных частных» l1=7 и l2=6 присутствует в неявном виде. Теория конечных полей Э. Галуа утверждает, что информация о «неполных частных» li может быть восстановлена при условии, что выбранные модули сравнения m1 и m2 не будут иметь других совместных делителей, кроме 1 ((m1, m2)=1) ([2], И.М. Виноградов «Основы теории чисел», М.: Наука, 1972 г.). Поэтому результат кодирования с использованием алгоритма (3) обладает следующими сущностными признаками:
- он является «безызбыточным» за счет того, что разрядность представления дополнительно закодированных данных Cj остается, в основном, неизменной и равной, например, 2n=8 или 2n=10, но, с другой стороны, за счет сжатой формы представления данных с исключением информации о модулях сравнения m1 m2 и «неполных частных» l1, l2, создана дополнительная внутренняя избыточность ТМИ, что, в итоге, приводит к повышению информационной нагрузки каждого двоичного символа;
- увеличено в 2n+1 раз минимальное кодовое расстояние между соседними значениями данных телеизмерений, благодаря чему обеспечена возможность обнаружения и исправления ошибок передачи данных телеизмерений.
Эффект увеличения минимального кодового расстояния можно пояснить на следующем примере.
Если взять соседние значения данных телеизмерений для случая 2n-8, например, Х1=<115>10=<01110011>2 и Х2=<116>10=<01110100>2, то при традиционных способах их представления кодовое расстояние между ними будет равно dmin(тр)=1. При этом в соответствии с теорией помехоустойчивого кодирования отсутствует возможность обнаружения ошибок передачи ТМИ ([3], Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360 с.).
При кодировании выбранных значений в соответствии с алгоритмом (3) и использовании модулей сравнения m1=15 и m2=17, получим: С1=<10101101>2=<173>10 и С2=<10111110>9=<190>10. В результате минимальное кодовое расстояние увеличилось в k=2n+1 раз и стало при n=4, равным dmin(СОК)=17. В результате этого обеспечивается возможность обнаружения и исправления ошибок передачи ТМИ. Увеличение минимального кодового расстояния (dкод) в 17 раз в соответствии с теорией помехоустойчивого кодирования обеспечивает возможность исправления до 4 ошибок передачи значений ТМП ([3]).
Однако у такого способа представления есть недостаток, заключающийся в том, что в общем случае для однозначного представления значений образов-остатков по модулям m2=2m+1 требуется не n, а (n+1) разрядов двоичного кода (в случае, когда 2n=8, пять разрядов). Если, например, при 2n=8 не ввести дополнительной избыточности в виде дополнительного
9 двоичного разряда и ограничиться n=4 при представлении значений b2i, то окажутся неразличимыми кодовые конструкции <0>10 и <135>10, а также <16>10 и <136>10. Это приведет к дополнительно привнесенным ошибкам. Хотя, в итоге, этот недостаток и перекрывается достигаемым техническим эффектом, получаемым при приеме за счет обнаружения и исправления ошибок передачи ТМИ в режиме «мягкого» декодирования, однако потенциальные возможности повышения помехоустойчивости данных телеизмерений не будут достигнуты.
Этот недостаток устранен при использовании предлагаемого изобретения. Предлагаемый способ предлагает одну из реализаций безызбыточного дополнительного помехоустойчивого кодирования с использованием образов-остатков. Особая практическая значимость безызбыточного дополнительного помехоустойчивого кодирования заключается в том, что его реализация не требует изменения существующей структуры телеметрических кадров и доработки уже существующей телеметрической аппаратуры или системы связи. Поэтому предлагаемый способ является щадящим по отношению к существующей практике. Он также может быть реализован программными методами путем перепрограммирования программируемых логических интегральных схем (ПЛИС), сигнальных процессоров и микроконтроллеров, на основе которых созданы существующие и разрабатываются перспективные бортовые радиотелеметрические системы (БРТС) и системы связи.
Сущностные характеристики предлагаемого способа заключаются в следующем. Он предполагает использование ПСАП на передающей стороне, которое представляет собой дополнительное кодирование значений слов-измерений, которые получают на выходе цифровых датчиков или аналого-цифровых преобразователей (АЦП). Его основу составляет деление слов-измерений или сообщений, представленных на выходе цифровых датчиков или АЦП N-разрядным двоичным кодом, на составные части или кодовые сегменты, которые затем переставляют местами с сохранением прежней разрядности слов-измерений или сообщений. При этом число N может быть как четным, например, N=2n (этот пример был рассмотрен ранее), так и нечетным, N=2n+1.
В первом случае, когда N=2n - четное число, примером базового ПСАП, максимизирующего число исправленных ошибок передачи ТМИ при неизменном dmin(Пер)=2n (если N=2n=8, то dmin(Пер)=24=16), может быть деление исходных слов-измерений, представленных N-разрядным двоичным кодом на старшее (a2i) и младшее (a1i) полуслова с сохранением традиционной позиционной системы их представления двоичным кодом с вдвое меньшей разрядностью (n).
Алгоритм кодирования исходных слов-измерений и сообщений, ориентированный на приведенный пример,

предполагает перестановку местами старшего (a2j) и младшего (a1j) полуслов или старшего (a2j) и младшего (a1j) кодовых сегментов:

где Cj - результат дополнительного безызбыточного помехоустойчивого кодирования слов-измерений и сообщений Xj.
Однако в общем случае результатами деления исходной кодовой конструкции слова-измерения или сообщения могут быть не только полуслова, но и другие ее составные части или кодовые сегменты. Например, при нечетном N (N=2n+1) возможны следующие два базовых варианта деления:
1) старшая часть (a2j), состоящая из (n+1) двоичного разряда, и младшая часть (a1j), представляемая n-разрядным традиционным позиционным двоичным кодом;
2) старшая часть (a2j), состоящая из n двоичных разрядов, и младшая часть (a1j), представляемая (n+1) - разрядным традиционным позиционным двоичным кодом.
Также возможны и другие варианты деления исходной двоичной кодовой конструкции на составные части или кодовые сегменты.
Различие между рассмотренными выше примерами дополнительного кодирования на основе различной разрядности сегментов будет проявляться в значениях минимального кодового расстояния dmin. Так, например, в первом случае dmin(1)=2(n+1), а во втором dmin(2)=2n.
Этот эффект продемонстрируем на следующих примерах. Пусть N=2n+1=9, что возможно при n=4. При этом X1=<115>10=<001110011>2 и Х2=<116>10=<001110100>2. Тогда для X1=<115>10 при первом варианте перестановки старшая часть (a2j), равная a2j=<00111>2 и состоящая из 5 двоичных разрядов, и младшая часть (a1j)=<0011>2, представляемая 4-хразрядным традиционным позиционным двоичным кодом, должны быть переставлены местами С1(1)=<001100111>2=<103>10. Для Х2=<116>10=<001110100>2 результат дополнительного кодирования приведет к следующему значению: С2(1)=<010000111>2=<135>10. Кодовое расстояние между ними равно: dmin(1)=|С1(1)-С2(1)|=2(n+1)=32 при n=4.
Второй вариант перестановки приведет к следующим значениям:
С1(2)=<100110011>2=<307>10 и С2(2)=<101000011>2=<323>10.
Кодовое расстояние между ними равно: dmin(2)=|С1(2)-С2(2)=2n=16 при n=4.
С точки зрения математического описания предлагаемого дополнительного кодирования информации с использованием теории конечных полей младшее полуслово (a1j) представляет собой остаток (b3j) (a1j=b3j) по модулю m3, равному значению минимального кодового расстояния m3(1)=2(n+1) в первом случае и m3(2)=2n во втором случае:

где индексы b3 и m3, равные i=3, выбраны с учетом предшествующей формулы (2), в которой индекс i=1, соответствует модулю сравнения m1=2n-1, а индекс i=2 - модулю сравнения m2=2n+1.
Перестановка полуслов или других составных частей или кодовых сегментов исходной кодовой конструкции слов-измерений в условиях, когда минимальное кодовое расстояние dmin увеличено по сравнению традиционной передачей информации, а разрядная сетка для представления результатов дополнительного кодирования осталась прежней N-разрядной, приводит к следующему продолжению математической постановки задачи изобретения - повторному сравнению результатов кодирования Cj по модулю N.

Таким образом, в предлагаемом способе также использованы две операции сравнения: первая, представленная формулой (6) - по модулю m3, и вторая, представленная формулой (7) - по модулю N.
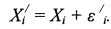
В результате этого исходное графическое отображение телеметрируемого параметра (ТМП), представленное на фиг. 1, преобразуют перед передачей ТМИ к виду, приведенному на фиг. 2.
Алгоритмы восстановления переданных значений при приеме ТМИ, предполагающие использование обратного структурно-алгоритмического преобразования (ОСАП), ориентированы на следующие два типа декодирования, условно называемые «жесткое» и «мягкое». При этом под «жестким» декодированием понимают операцию восстановления первоначальных значений телеизмерений без исправления ошибок путем обратной перестановки составных частей или кодовых сегментов, разрядность которых известна на приемной стороне.
Цель использования алгоритма «жесткого» декодирования заключается в том, чтобы обеспечить восстановление информации в самом общем случае, в том числе и при отсутствии корреляционной взаимосвязи между
соседними отсчетами ТМП, с погрешностью, которая была бы не хуже той, что получают при использовании существующей практики передачи результатов телеизмерений. Дополнительное назначение алгоритма «жесткого» декодирования также заключено в том, чтобы пользователь имел возможность увидеть то качество приема ТМИ, которое получают при использовании существующей практики телеизмерений. Такой подход направлен, помимо прочего, на устранение психологической неуверенности той части специалистов, которые плохо усваивают различные новшества.
Цель использования алгоритма «мягкого» декодирования состоит в том, чтобы обнаружить и исправить ошибки передачи в закодированных значениях ТМП.
При этом под «мягким» декодированием понимают последовательность следующих операций: выделения графических фрагментов данных дополнительного кодирования, заключенных между соседними максимальными значениями абсолютных разностей δjM=|Cj-C(j+1)|≥0,8×2N, и δ(j+s)M=|C(j+s)-C(j+s)+1|≥0,8×2N), равными или большими значений (0,8×2N), где Cj - результат дополнительного безызбыточного помехоустойчивого кодирования j-того по принятому порядку счета слова-измерения или сообщения Xj, a δjM=|Cj-Cj+1| и δ(j+s)M=|C(j+s)-C(j+s)+1| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений Cj, Cj+1, определяющие начало графического фрагмента, и C(j+s), C(j+s)+1, определяющие окончание графического фрагмента, включающего в себя s выборок закодированных на основе перестановки составных частей значений телеметрируемых параметров, N-число разрядов слов-измерений или сообщений Xj.
Таким образом, предлагаемый способ заключается в том, что на передающей стороне осуществляют сбор сигналов от источников сообщений, преобразуют их в двоичный код, обеспечивают синхронизацию сформированных
слов-измерений и формируют из них уплотненный цифровой групповой сигнал, подлежащий передаче по каналам связи.
От известных аналогов он отличается тем, что на передающей стороне кодовые конструкции, сформированные на первом этапе кодирования слов-измерений или сообщений, разделяют на полуслова с равным числом двоичных разрядов, в том числе на другие части или кодовые сегменты, имеющие различное число разрядов при их представлении двоичным кодом, которые затем переставляют их местами с сохранением прежней разрядности представления слов-измерений или сообщений, но с получением их новых значений, сформированные слова-измерения или сообщения расставляют в уплотненном групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, сформированный таким образом уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность слов-измерений или сообщений, осуществляют параллельное их декодирование с использованием «жесткого» и «мягкого» декодеров, при этом в результате операции «мягкого» декодирования определяют графические фрагменты закодированных на основе перестановки составных частей или кодовых сегментов первоначальных значений телеметрируемых параметров, заключенные между соседними максимальными значениями абсолютных разностей δjM=|Cj-C(j+1)|≥0,8×2N, и δ(j+s)M=(C(j+s)-C(j+s)+1|≥0,8×2N), равными или большими значений 0,8×2N, где Cj - результат дополнительного безызбыточного помехоустойчивого кодирования j-того по принятому порядку счета слова-измерения или сообщения Xj, a δjM=|Cj-Cj+1| и δ(j+s)M=|C(j+s)-C(j+s)+1| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений Cj, Cj+1, определяющие
начало закодированного графического фрагмента, и C(j+s), C(j+s)+1, определяющие окончание графического фрагмента, включающего в себя s выборок закодированных на основе перестановки составных частей значений телеметрируемых параметров, при этом N - это число разрядов, которые используют для представления слов-измерений или сообщений Xj, обеспечивают обнаружение и исправление ошибок передачи значений телеметрируемых параметров на основе групповых свойств «равноостаточности», которые должны быть постоянными при отсутствии ошибок передачи информации в выделенных закодированных графических фрагментах телеметрируемого параметра, преобразованного при дополнительном помехоустойчивом кодировании на передающей стороне, а в результате операции «жесткого» декодирования осуществляют восстановление первоначальных результатов телеизмерений без исправления ошибок путем обратной перестановки составных частей, разрядность которых известна на приемной стороне, осуществляют сглаживание или фильтрацию восстановленных в результате «жесткого» декодирования данных и по отношению к вычисленным соседним значениям телеизмерений определяют их разности, которые при выполнении операций «мягкого» декодирования с учетом разрешенных позиций для значений принятого безызбыточного помехоустойчивого кода используют в качестве допусков при выборе наиболее подходящих, кондиционных значений восстанавливаемых данных телеизмерений, определяемых в соответствии с принятым критерием достоверности, производят повторное «жесткое» декодирование данных телеизмерений, скорректированных в результате операций «мягкого» декодирования, сглаженные или отфильтрованные данные, полученные при первой операции «жесткого» декодирования сравнивают с синхронными, совпадающими по времени опроса, значениями, полученными в результате второй операции «жесткого» декодирования, результаты сравнения используют для оценивания достигаемого технического эффекта в виде оценок повышения показателей достоверности приема телеметрической информации, а также для сравнения полученных результатов и корректировки значений сглаживания или фильтрации данных телеизмерений, полученных при первом «жестком» декодировании, определяют их близость к другим разрешенным позициям помехоустойчивого кода, сформированного при дополнительном кодировании телеметрируемого параметра на передающей стороне, в результате чего реализуют расширенные возможности, используемые для контроля достоверности полученных результатов телеизмерений и информационной поддержки принятия решений.
Предлагаемый способ также отличается тем, что при выполнении операций «мягкого» декодирования принятые с ошибками данные телеизмерений, преобразованные на передающей стороне с использованием дополнительного кодирования результатов телеизмерений, приводящих к дополнительному безызбыточному помехоустойчивому кодированию и принадлежащие выделенным графическим фрагментам преобразованных телеметрируемых параметров, подвергают делению на первый модуль сравнения m3, равный реализованному в результате дополнительного помехоустойчивого кодирования минимальному кодовому расстоянию dmin=2n при N=2n или dmin=2n+k при N=2n+k, где N - число двоичных разрядов в исходном двоичном коде слов-измерений или сообщений, k=0, 1, 2, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде постоянства значения группового свойства «равноостаточности», наблюдаемого в пределах выделенного графического фрагмента, выбирают в сформированной статистической выборке, состоящей из остатков, полученных в результате операции деления на первый модуль сравнения m3, наиболее часто встречающееся значение, которое рассматривают в качестве кандидата в инварианты, при этом все другие значения остатков, не совпадающие со значением найденного кандидата-инварианта, используют
в качестве признака обнаружения ошибок передачи результатов телеизмерений, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на первый модуль сравнения m3 дают значение остатка, равное установленному значению кандидата-инварианта, найденному для выделенного графического фрагмента, выбирают среди выделенных преобразованных данных телеизмерений значения, принадлежащие наиболее близким по абсолютной величине разрешенным позициям сформированного на передающей стороне дополнительного помехоустойчивого кода, которые отстоят друг от друга на величину, равную lm3, m3=dmin, l=1, 2, 3, …, где dmin - минимальное кодовое расстояние реализованного на передающей стороне дополнительного помехоустойчивого кода, при выполнении условия, что величины различий принятых данных от их номинальных значений, определяемых априорно известными разрешенными позициями реализованного на передающей стороне дополнительного помехоустойчивого кода, не выходят за пределы допусков, которые устанавливают на основе результатов «жесткого» декодирования принятых сигналов и последующего их сглаживания или фильтрации на основе различных способов сглаживания или фильтрации.
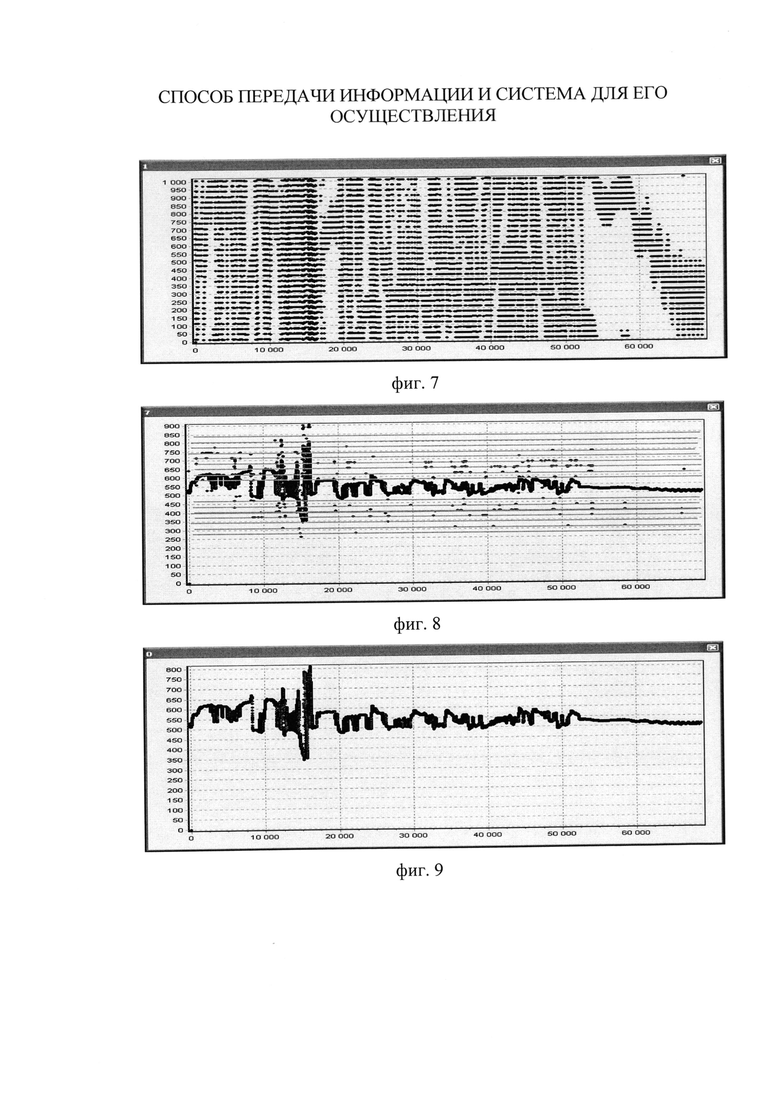
Представление о техническом эффекте, который получают при реализации способа, дают иллюстрации, приведенные на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
На иллюстрации, представленной на фиг. 1, показано графическое отображение ТМП, смоделированного в виде синусоидального изменяющегося напряжения, при его представлении десятиразрядным двоичным кодом (N=2n=10), когда количество возможных кодовых комбинаций равно Ш=210=1024. Об этом свидетельствует шкала представления исходных и закодированных значений ТМП (Ш=0-1023). Такой формат представления наиболее часто используют в отечественной практике телеизмерений.
Значения телеизмерений были искажены на всем интервале представления данных шумовой помехой, из-за чего изображение ТМП отображается на фиг. 1 жирной линией, вызванной случайным шумом в младших разрядах позиционного двоичного кода. Кроме того, на отдельном временном участке от 1000 мсек до 4000 мсек передаваемый ТМП был дополнительно искажен импульсной помехой.
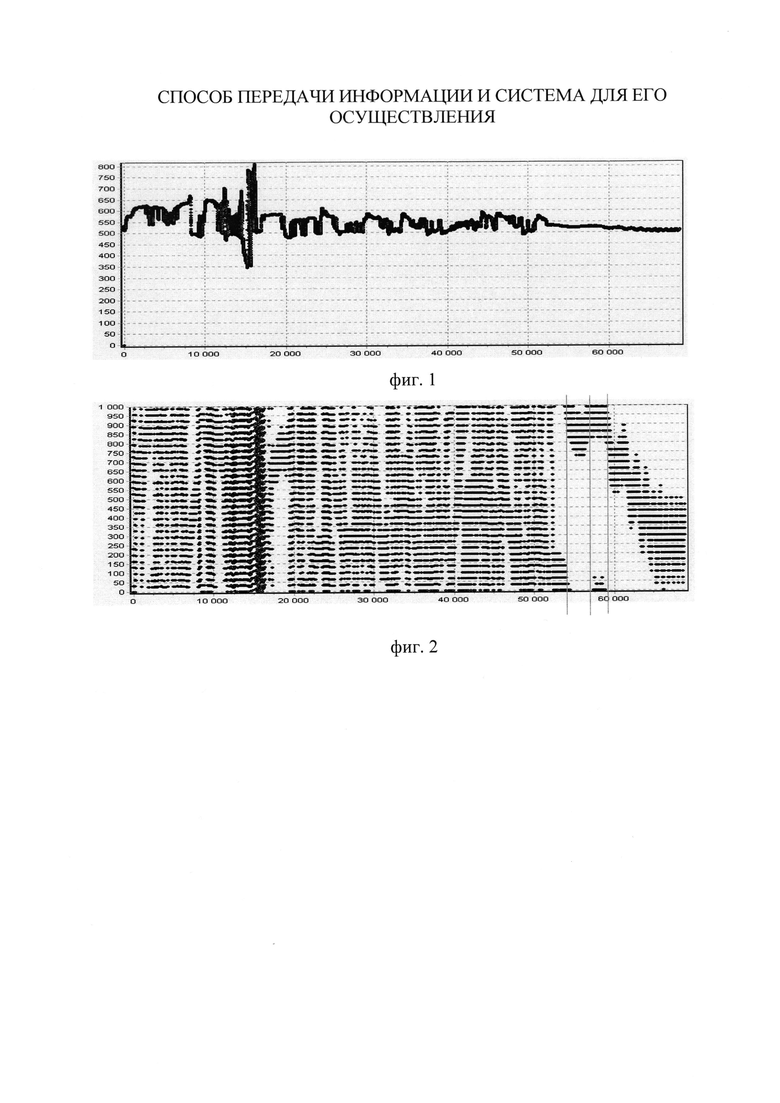
На фиг. 2 представлено графическое отображение того же ТМП, но после использования алгоритма ПСАП, приводящего к случаю безызбыточного помехоустойчивого кодирования, реализующего формулу структурно-алгоритмических преобразований (7).
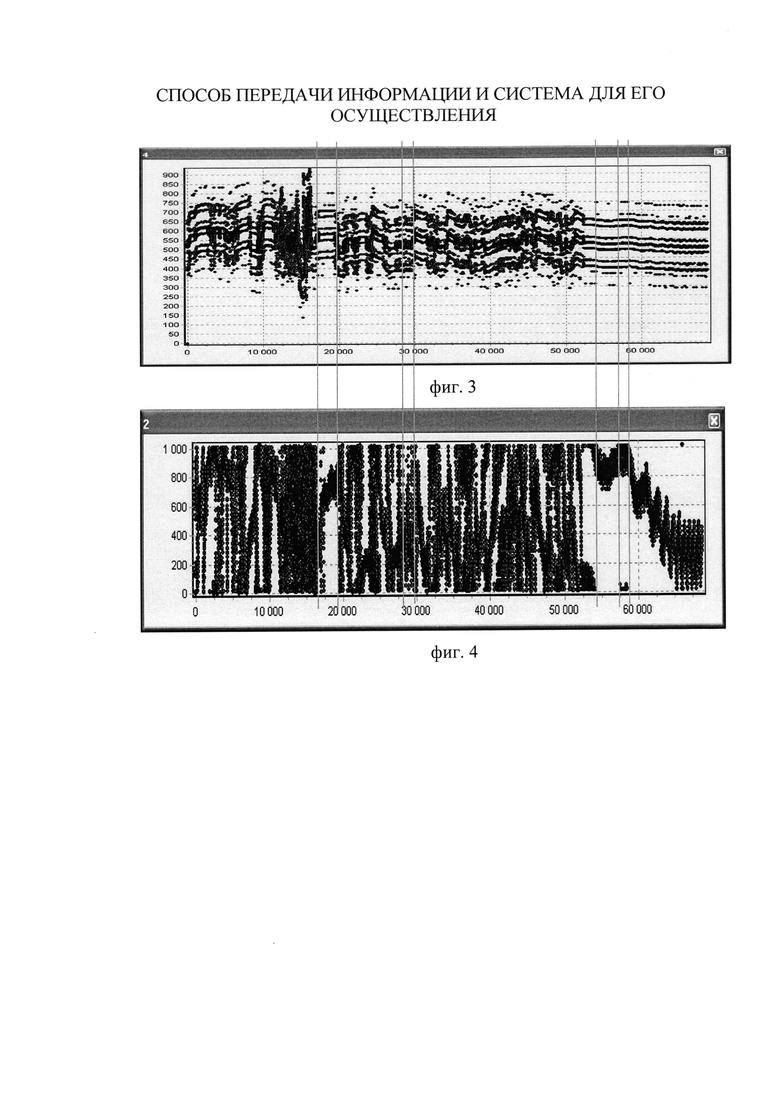
На фиг. 3 представлены вычисленные значения инварианта, который принимает при отсутствии искажений телеизмерений помехами постоянное значение. С точки зрения математики он проявляется в виде группового свойства «равноостаточности», которое оказывается справедливым для отдельных графических фрагментов ТМП, заключенных между разрывами первого рода, идентифицированных, как δiM*=|Cj*-Cj+1*| при δi*>0,8×2N, где Cj*=Cj+εj, a εj - ошибка телеизмерений, обусловленная помехой; Cj - результат дополнительного безызбыточного помехоустойчивого кодирования j-того по принятому порядку счета слова-измерения или сообщения Xj; δjM*=|Cj*+Cj+1*| и δ(j+s)M*=|C(j+s)*-C(j+s)+1*| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений, превышающие значение (0,8×2N) и определяющие, с учетом искажений возможными ошибками εjM и ε(j+s)M, начало и окончание графических фрагментов закодированных на основе перестановки составных частей или кодовых сегментов первоначальных значений телеметрируемых параметров; N- число разрядов, используемых для представления Xj и Cj.
Появление группового свойства «равноостаточности» связано с тем, что перестановка при дополнительном кодировании Cj, предполагающем
перестановку местами старших и младших полуслов a2j и a1j исходных значений телеизмерений Xj, j=0, 1, 2 … в соответствии с формулой (7) соответствует из-за сохранения позиционной структуры сформированного в результате дополнительного кодирования значений Cj умножению Xj на соответствующий модуль сравнения m3, равный для случая перестановки младших и старших полуслов значению m3=2n. Однако это свойство выполняется только в пределах выделенного графического фрагмента, заключенного между разрывами, определяемыми вычисленными значениями δjM*=|Cj*+Cj+1*| и δ(j+s)M*=|C(j+s)*-C(j+s)+1*|.
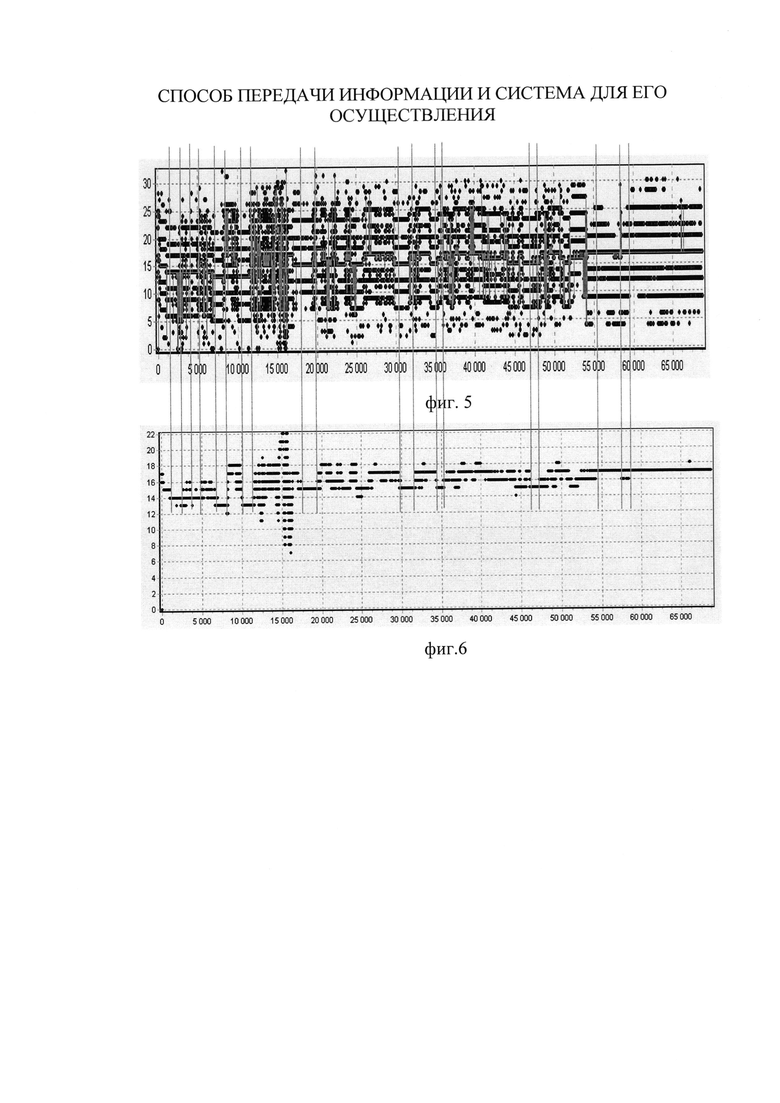
Следовательно, если в выделенных при приеме ТМИ графических фрагментах преобразованного ТМП результаты кодирования Cj, которые не искажены помехой εj, и разделить на модуль сравнения m3, равный минимальному кодовому расстоянию dmin, то получим одни и те же остатки от деления Cj на m3. Для наглядности на фиг. 2 и фиг. 3 пример выделения графических фрагментов преобразованного ТМП отображен вертикальными линиями. Из приведенного на фиг. 3 графика следует, что значения остатков от деления находятся в узком диапазоне данных при отсутствии искажений импульсной помехой. Мода закона их распределений четко выражена и представляет собой значение кандидата-инварианта. Поэтому шумовые ошибки телеизмерений обнаруживают и исправляют с высокой вероятностью (до значений Ри=0,99). Об этом свидетельствует и более тонкая линия графического представления восстановленного при приеме ТМП (фиг. 4), поскольку был исправлен шум, обусловленный искажениями младших разрядов двоичного кода. Наиболее сложный случай для обнаружения и исправления ошибок телеизмерений проявляется при искажении мощной импульсной помехой. Он промоделирован на временном интервале от 1000 мсек до 4000 мсек (фиг. 1-4). В этом случае закон распределения значений «равноостаточности» имеет не одну, а несколько вершин. При этом задача идентификации кандидата-инварианта заключается в
том, чтобы выбрать максимальное значение «равноостаточности», принадлежащее одной из наблюдаемых вершин закона распределения значений «равноостаточности». Однако при этом могут оставаться неисправленные ошибки ε/j (на фиг. 4 их три). Особенность инварианта в виде свойства «равноостаточности» также проявляется в том, что его значения одновременно можно рассматривать и как номер (μ) «узких» шкал телеизмерений, к которым относятся выделенные фрагменты (фиг. 3). Из графического представления, приведенного на фиг. 3, следует, что μ принимает значения от 0 до 31. При этом число разрешенных позиций безызбыточного кода в выделенных графических фрагментах ТМП равно μ=32. В итоге получаем те же m3×μ=32×32=1024 значений 10-тиразрядных конструкций двоичного кода, что и при исходном традиционном графическом отображении передаваемого ТМП для случая десятиразрядных двоичных слов-измерений (Ш=(0-1023)).
Из сравнения иллюстраций, приведенных на фиг. 1-4, следует:
1) минимальное кодовое расстояние увеличено в 2n раз, что при 2n=10 соответствует значению dmin(пс)=32 (при традиционном методе представления (фиг. 1) dmin=1);
2) при новом представлении значений ТМП более эффективно использован весь диапазон Ш=0-1023, ограниченный значением выбранной разрядной сетки (2n=10);
3) из-за эффекта усиления по амплитуде, обусловленного изменением значений минимального кодового расстояния dmin(пс)=32 повышен уровень информационной насыщенности преобразованного ТМП (на его графическом отображении видны те изменения, которые может дать только датчик точной метрологической шкалы измерений, в результате повышают разрешающую способность в смысле критерия Релея, определяющего возможность одновременного наблюдения двух и более различных объектов, в нашем случае процессов);
4) в выделенных графических фрагментах преобразованного (закодированного) ТМП, выполняются групповые свойствами «равноостаточности», суть которых заключается в том, что достоверно принятые (неискаженные помехами) значения ТМП при делении на модуль сравнения m3=2n, равный минимальному кодовому расстоянию dmin, дают один и тот же остаток (выделенные графические фрагменты преобразованного ТМП заключены между разрывами первого рода, границы которых в качестве примера выделены на фиг. 2 вертикальными линиями).
Отмеченные групповые свойства «равноостаточности» проявляются только при нетрадиционном представлении передаваемых сообщений с использованием образов-остатков. Понятие «равноостаточности» известно в математике ([3], И.М. Виноградов «Основы теории чисел», М.: Наука, 1972 г.). Групповые свойства «равноостаточности» составляют основу прикладного использования теории групп в информатике ([4], Кукушкин С.С. Теория конечных полей и информатика. Т. 1., М.: Минобороны России, 2003. - 278 с.).
Задача изобретения также заключается в том, чтобы показать, как групповые свойства «равноостаточности» могут быть использованы в технических приложениях для разрешения существующих противоречий. Групповые свойства - это область математической конструктивной теории конечных полей [4]. В существующем математическом обеспечении представления, приема и обработки ТМИ она не использовалась.
Таким образом, новизна предлагаемого изобретения заключается в том, что групповые свойства «равноостаточности» используют для обнаружения ошибок телеизмерений в режиме «мягкого» декодирования, для чего на приемной стороне для каждого выделенного графического фрагмента (фиг. 2, фиг. 3) выполняют следующие операции:
1) определяют остатки от деления принятых значений C*j на модуль сравнения m3=2n, равный минимальному кодовому расстоянию dmin (фиг. 2);
2) по большинству совпавших значений вычисленных остатков (по значению моды закона распределения значений вычисленных остатков) идентифицируют значение «равноостаточности» выделенного графического фрагмента (фиг. 3);
3) другие значения остатков, которые отличаются от значений, идентифицированных по признаку большинства повторений, идентифицируют, как принадлежащие телеизмерениям, принятым с ошибками (фиг. 3);
4) исправление ошибок осуществляют на основе подбора ближайшего значения ТМП, находящегося в пределах минимального кодового расстояния dmin, которое при делении дает остаток, значение которого совпадает со значениями большинства повторений в статистической выборке, ограниченной числом данных телеизмерений в выделенном графическом фрагменте.
Ошибка в подборе ближайшего значения ТМП, находящегося в пределах минимального кодового расстояния dmin, при декодировании (при ОСАП) будет минимальной, равной элементарному кванту dmin.
Результаты кодирования можно рассматривать и как результат усиления в m3=2n диапазона представления значений ТМП, который затем ограничивают возможностями представления преобразованных значений в принятой ограниченной разрядной сетке отображения данных (для иллюстраций, приведенных на фиг. 1 и фиг. 2 она ограничена 10 разрядами двоичного кода (2n=10)). В результате этого получают «узкие» шкалы представления преобразованного (усиленного по амплитуде) ТМП, представление значений которого ограничено для приведенного на фиг. 2 примера 10 разрядами двоичного кода. К одной из таких «узких» шкал относится и
графический фрагмент (фиг. 2), заключенный между вертикальными линиями.
Для повышения оперативности преобразования значений ТМП в предлагаемом способе используют замещающие операции, суть которых заключена в том, чтобы не осуществлять традиционное деление числа (m3×Xj) на число Ш=22n. Основу для превращения Xi в новое сообщение Ci составляют свойства двоичного кода, которым представляют результаты выполненных измерений. Эту операцию выполняют автоматически при превышении результатами умножения (m3×Xi) предельного значения выделенного диапазона шкалы Ш=22n однозначного представления значений преобразованного ТМП (фиг. 2).
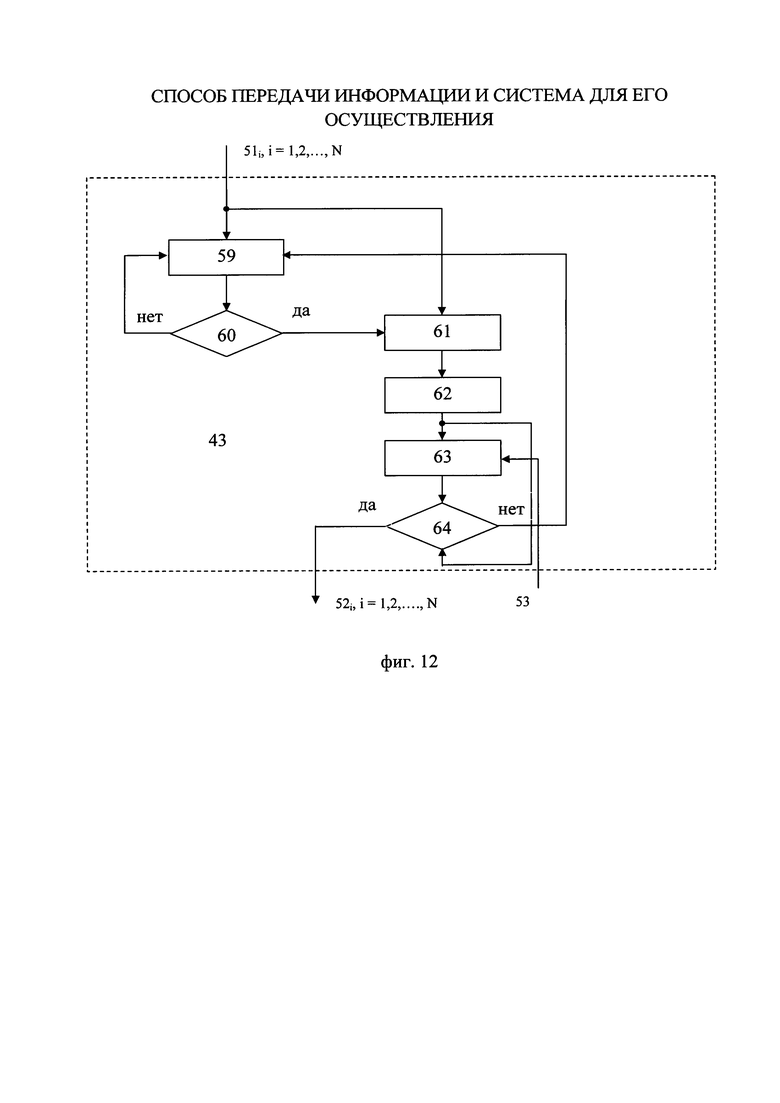
Алгоритм «мягкого» декодирования предполагает выполнение следующих операций, последовательность которых представлена на фиг. 5 цифрами от 1 до 6, где
1 - нахождение абсолютных разностей между соседними закодированными значениями ТМП: 
2 - выделение графического фрагмента ТМП, заключенного между соседними значениями абсолютных разностей 
3 - определение значений равноостаточности  для закодированных данных внутри выделенного графического фрагмента для каждого временного отсчета j:
для закодированных данных внутри выделенного графического фрагмента для каждого временного отсчета j:

4 - построение гистограммы распределений значений и нахождения ее моды:

где ƒдост - значение равноостаточности, которое воспринимают как верное;
5 - выполнение операций:
1) корректировка , предполагающая замену значений отличающихся от наиболее часто совпадающих значений (моды), на ƒдост;

в результате чего исправляют ошибки εj;
2) восстановление скорректированных значений

3) сравнение  со значением
со значением  полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений для подтверждения достоверности и принятие решения о выдаче значения ;
полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений для подтверждения достоверности и принятие решения о выдаче значения ;
6 - окончание массива значений ТМП C*j, j=1, …, s, попавших в выделенный графический фрагмент, и выдача результатов «мягкого» декодирования во второй блок «жесткого» декодирования.
Система для передачи информации, реализующая предлагаемый способ, содержит на передающей стороне датчики, локальные коммутаторы, бортовой цифровой вычислительный комплекс, бортовую аппаратуру потребителей, блок синхронизации, блок переключения режимов формирования телеметрических кадров, блок формирования телеметрического кадра и передатчик, на приемной стороне в состав системы входят приемник, блок формирования сигналов синхронизации, блок формирования цифрового группового телеметрического сигнала, отличающаяся тем, что на передающей стороне введены блок переключения режимов формирования телеметрических кадров, блок структурно-алгоритмических преобразований, реализующий изменение формата телеметрических кадров и выбор алгоритма преобразования для обеспечения обнаружения и исправления ошибок передачи при дополнительном безызбыточном кодировании, блок задержки, первый и второй блоки дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, дополнительный передатчик, а на приемной стороне введены блок «мягкого» декодирования,
обеспечивающий обнаружение и исправление ошибок передачи, первый и второй блоки «жесткого» декодирования, обеспечивающие восстановление первоначальных значений телеизмерений без исправления ошибок путем обратной перестановки составных частей или кодовых сегментов, блок оценки достоверности, к каждому из локальных коммутаторов подключены выходы n датчиков, интерфейсные входы-выходы которых подключены к первому входу блока формирования телеметрического кадра, второй, третий, четвертый, пятый и шестой входы которого подключены к интерфейсному входу-выходу бортового цифрового вычислительного комплекса, бортовой аппаратуры потребителей, блока синхронизации, блока переключения режимов формирования телеметрических кадров и блока структурно-алгоритмических преобразований, соответственно, кроме того, бортовой цифровой вычислительный комплекс и блок переключения режимов формирования телеметрических кадров объединены между собой интерфейсом обмена данными, бортовая аппаратура потребителей и блок синхронизации объединены между собой интерфейсом обмена данными, также блок синхронизации и блок переключения режимов формирования телеметрических кадров объединены между собой интерфейсом обмена данными, управляющий вход бортовой подсистемы соединен с объединенными управляющими входами блока переключения режимов формирования телеметрических кадров и блока структурно-алгоритмических преобразований, выход блока формирования телеметрического кадра соединен с объединенными входами блока задержки и первого блока дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, выход которого подключен ко входу передатчика, на выходе которого формируют не задержанный поток передаваемой телеметрической информации, выход блока задержки соединен со входом второго блока дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, выход которого подключен ко
входу дополнительного передатчика, на выходе которого формируют задержанный поток передаваемой телеметрической информации, на приемной стороне введен дополнительный комплект приемной аппаратуры, при этом в каждый из комплектов приемной аппаратуры входят приемник, блок формирования сигналов синхронизации, блок формирования цифрового группового телеметрического сигнала, регистратор и дополнительно введены блок «мягкого» декодирования, k входов которого объединены соответствующими k входами первого блока «жесткого» декодирования и подключены к соответствующим k выходам блока формирования цифрового группового телеметрического сигнала, вход которого соединен с первым выходом приемника, второй выход которого подключен к первому входу блока формирования сигналов синхронизации, первый выход которого подключен ко второму входу приемника, первый вход которого является информационным, а третий вход управляющим, управляющим также является и второй вход блока формирования сигналов синхронизации, второй выход которого подключен к дополнительному входу блока оценки достоверности, первая группа из k входов которого объединена с соответствующей первой группой входов регистратора и подключена к соответствующим выходам второго блока «жесткого» декодирования, k входов которого соединены с соответствующими k выходами блока «мягкого» декодирования, вторая группа из k входов блока оценки достоверности объединена с соответствующей второй группой входов регистратора и подключена к соответствующим выходам первого блока «жесткого» декодирования, (k+1) выход которого соединен с (k+1) выходом блока «мягкого» декодирования, первый и второй выходы блока оценки достоверности подключены к соответствующим дополнительным входам регистратора.
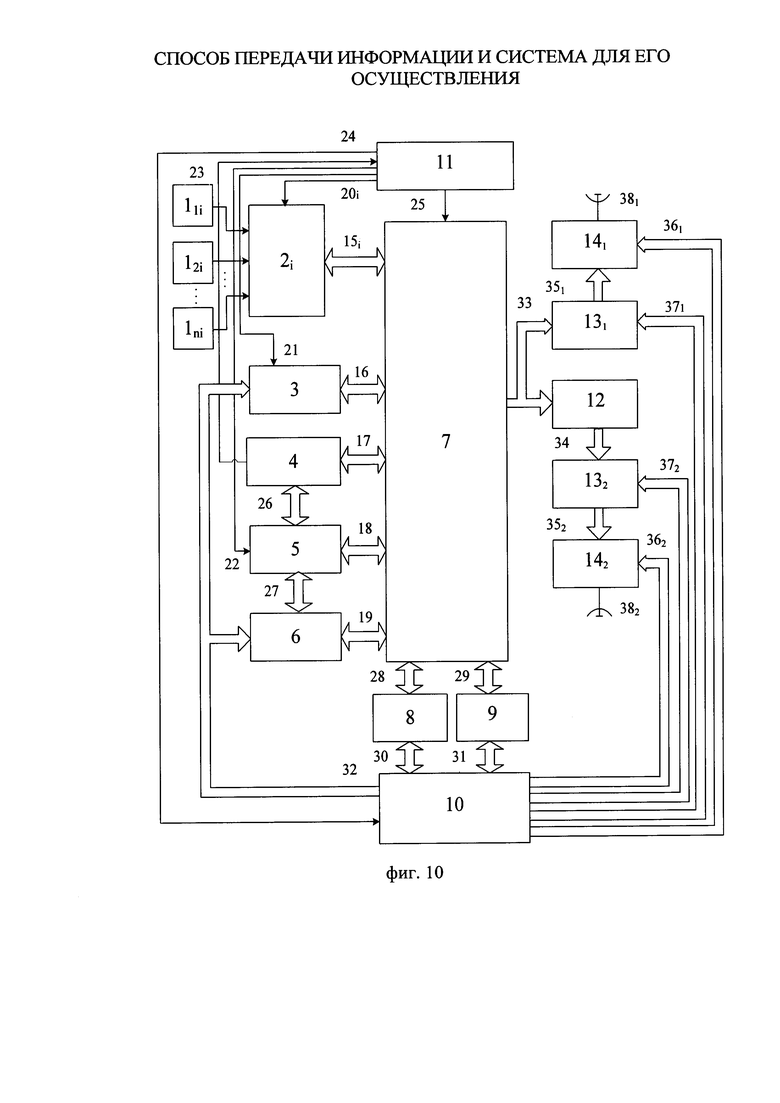
Система, реализующая предлагаемый способ, на передающей стороне (фиг. 6) содержит: датчики 11i, 12i, …, 1ni локальные коммутаторы 2i, бортовой цифровой вычислительный комплекс 3, бортовую аппаратуру
потребителей 4, блок 5 синхронизации, блок 6 переключения режимов формирования телеметрических кадров, блок 7 формирования телеметрического кадра, блок 8 структурно-алгоритмических преобразований, блок 9 задержки, блоки 101 и 102 дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, передатчики 111 и 112, каналы связи 251 и 252. Обмен данными между блоками может быть обеспечен с использованием интерфейсов RS-232, RS-422, RS-485 (входы/выходы 12i, 13-24).
Работа бортовой телеметрической системы (БРТС) заключается в следующем. Контролируемые параметры x(t) преобразуют с использованием датчиков 11i, 12i, …, 1ni в дискретные значения x(t), где время t представлено дискретными значениями Xi, где i - значения телеметрируемого процесса x(t) в моменты времени t=αTo, где To - интервал опроса значений ТМП, определяемый теоремой дискретизации В.А. Котельникова, α=1, 2, 3, … - натуральный ряд чисел. Каждое из полученных при этом значений Xi, где i - присвоенный условный номер целочисленной последовательности, преобразуют в аналого-цифровом преобразователе (ЦП), входящем в состав датчика, в слова-измерения или сообщения, представленные 2n - разрядным двоичным кодом. Сформированные таким образом данные телеизмерений различных датчиков поступают через интерфейс в коммутатор (концентратор данных) 2i, в котором они выстраиваются в определенном порядке по отношению к сигналу синхронизации (СС), определяющему начало большого телеметрического кадра или кадра низкочастотных данных локальных коммутаторов. Этот сигнал синхронизации в ряде телеметрических систем называют низкочастотным маркером (НЧМ) ([5], «Современная телеметрия в теории и на практике / Учебный курс», СПб.: Наука и Техника, 2007. - 672 с, стр. 469). Затем производят обмен с блоком 7 формирования телеметрического кадра с использованием интерфейсов RS-232, RS-422, RS-485 следующими данными:
1) данными, представляющими собой групповые телеметрические сигналы локальных коммутаторов 2i (входы/выходы 12i);
2) данными бортового цифрового вычислительного комплекса (БЦВК) 3 (вход/выход 13);
3) данными бортовой аппаратуры потребителей (БАП) 4 (вход/выход 14);
4) данными блока 5 синхронизации (вход/выход 15);
5) данными блока 6 переключения режимов формирования телеметрических кадров (вход/выход 16).
При этом из БЦВК 3 по первому входу/выходу 17 в блок 6 переключения режимов формирования телеметрических кадров поступает командная информация, определяющая структуру формируемого телеметрического кадра и моменты времени переключения режимов их формирования. Обратная информация об исполнении команд приходит по интерфейсному входу/выходу 17 из блока 6 переключения режимов формирования телеметрических кадров в БЦВК. Кроме того, по второму интерфейсному входу/выходу 18 в блок 6 переключения режимов формирования телеметрических кадров и в блок 8 структурно-алгоритмических преобразований (САП) поступают команды на выбор заданных алгоритмов САП. При этом блок 6 переключения режимов формирования телеметрических кадров обменивается данными по интерфейсу 20 с блоком 5 синхронизации. В блоке 5 синхронизации команды, передаваемые из блока 6 переключения режимов формирования телеметрических кадров используют для соответствующей перестановки кодовых конструкций ККi, из которых составлен сигнал синхронизации. Пример такого составного сигнала синхронизации рассмотрен в ([6], «Способ синхронизации передаваемых сообщений и сигналов» (Патент RU №2538281 С2, опубликован 10.01.15, бюл. №1). Для повышения точности временной синхронизации блока 5 синхронизации используют поступающий по входу/выходу 19 сигнал «Метка времени», передаваемый спутниковыми радионавигационными системами (СРНС) ГЛОНАСС/GPS и принимаемый бортовой аппаратурой потребителей (БАП) 4, установленной на контролируемом объекте. В результате этого сигнал синхронизации используют по следующему дополнительному назначению:
1) для получения при приеме группового телеметрического сигнала (ГТС) информации об изменении на передающей стороне условий формирования телеметрического кадра;
2) для повышения точностных характеристик системы временной синхронизации принимаемой информации.
Пример технической реализации адаптивной системы передачи ТМИ, основу которой составляет передаваемый составной сигнал синхронизации, приведен в ([7], «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления» (Патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.). В блоке 8 выбирают алгоритм прямых структурно-алгоритмических преобразований, например, алгоритм (3), рассмотренный в данном способе. В результате обмена по входу/выходу 21 между блоками 7 и 8 обеспечивают структурно-алгоритмические преобразования (САП) либо всего множества данных телеизмерений, либо какой-то его части, принадлежащей, например, к информационно-значимым ТМП. Сформированный в блоке 7 формирования телеметрического кадра результирующий групповой телеметрический сигнал поступает по входу/выходу 22 параллельно в блок 9 задержки и в первый блок 101 дополнительного кодирования и первичной модуляции групповых телеметрических сигналов. В блоке 9 задержки поток данных телеизмерений, сформированный в блоке 7 формирования телеметрического кадра, задерживают на время, равное планируемой максимальной продолжительности сбоев, для исключения потерь ТМИ, вызванных нарушением условий связи. В каждом из блоков 101 и 102 дополнительного кодирования и первичной модуляции формируют последовательность двоичных символов «0» и «1» групповых телеметрических сигналов, которую подвергают первичной модуляции с использованием заданной логики соответствия формируемого импульсного видеосигнала (БВН, кода Манчестер и др.) и исходной последовательности двоичных символов. Кроме того, данные блоки предназначены и для перевода исходной последовательности символов «0» и «1» двоичного кода в М-позиционный код, в том числе и в троичный код (М=3) с символами S0, S1, S2 на основе следующего соответствия ([8], Способ передачи ТМИ и система для его осуществления (Патент RU №2480840 С1, опубл. 25.04.2013, бюл. №21 -16 с.):
где {00, 11}; {001, 10} и {101} - двоичные кодовые комбинации сформированных телеметрических сигналов;
S0, S1, S2 - соответствующие им символы троичного кода, которые одновременно преобразуют в амплитудно-импульсную модуляцию (АИМ) с основанием 3 (АИМ3) и широтно-импульсную модуляцию (ШИМ) с основанием 3 (ШИМ3).
В передающих устройствах 111 и 112 первичную модуляцию в виде АИМм и ШИМм, в том числе АИМ3 и ШИМ3, используют для модуляции несущей радиосигнала. С этой целью, например, АИМ3 преобразуют в частотную модуляцию ЧМ3 со следующими значениями частоты: 1) f0-Δf, 2) f0 и 3) f0+Δf, где Δf - индекс девиации частоты, а ШИМ3 в фазовую (ФМ2) и относительно-фазовую (ОФМ2) модуляции с изменением фазы передаваемых частот f0-Δf, f0 и f0+Δf на ±180° [8, 9]. Также для повышения надежности связи применяют различные приемы понижения скорости передачи ТМИ и уменьшения плотности модуляции, например, используют квадратурные методы модуляции.
Для повышения показателей достоверности приема сообщений необходимо иметь несколько способов восстановления ТМИ в ее первоначальном виде. Один из способов восстановления при приеме значений ТМП в исходном виде используют в прототипе [1]. Однако при повышенных требованиях к достоверности приема ТМИ требуется большое количество различных алгоритмов восстановления. Такая возможность реализована в предлагаемом способе.
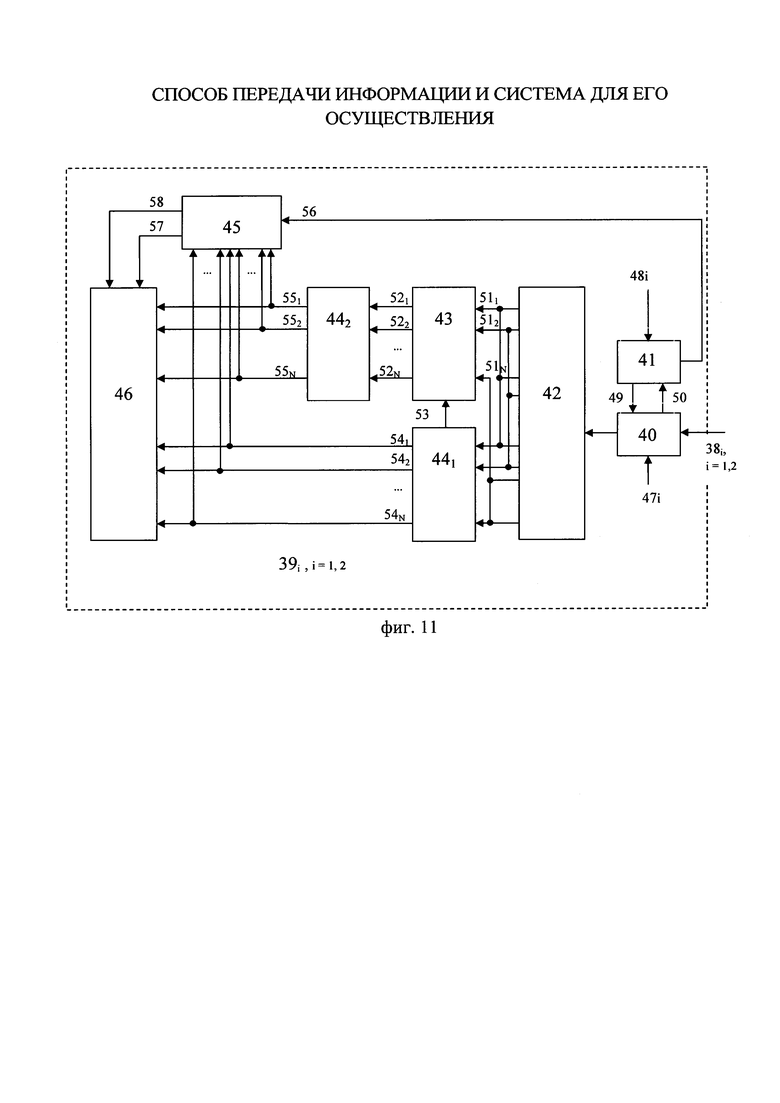
Система, реализующая предлагаемый способ на приемной стороне (фиг. 7), содержит: два комплекта приемной аппаратуры 26i, i=1, 2. Каждый из них содержит: приемник 27, блок 28 формирования сигналов синхронизации, блок 29 формирования цифрового группового телеметрического сигнала, блок 30 «мягкого» декодирования, осуществляющий обнаружение и исправление ошибок передачи слов-измерений или сообщений блоки 311 и 312 «жесткого» декодирования, реализующий операцию восстановления первоначальных значений телеизмерений без исправления ошибок путем обратной перестановки кодовых сегментов, разрядность которых известна на приемной стороне, блок 32 оценки достоверности, регистратор 33.
Алгоритм (4) реализован на приемной стороне в блоках 311 и 312 «жесткого» декодирования.
В блоке 30 «мягкого» декодирования (фиг. 5) реализована последовательность операций (5-10). На вход 38i, (i=1, 2, …, k) блока 30 «мягкого» декодирования поступают значения закодированного параметра, принятого с ошибками:
Ci*=Ci+εi.
При существующей технологии передачи такими же ошибками εi будут приняты и данные телеизмерений
i *=Xi+εi.
В блоке 30 «мягкого» декодирования на основе исправления внутри выделенных графических фрагментов значений остатков от деления  на ƒдост обеспечивают восстановление скорректированных значений
на ƒдост обеспечивают восстановление скорректированных значений
 , где число ошибок
, где число ошибок  меньше,
меньше,  .
.
Для подтверждения достоверности восстановленные в блоке 30 «мягкого» декодирования  сравнивают с подобным значением
сравнивают с подобным значением  , полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений.
, полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений.
На выходе 39i, (i=1, 2, …, k) блока 30 «мягкого» декодирования получают результаты с уменьшенным числом ошибок ε/i.
Отношение

используют в блоке 32 оценки достоверности (фиг. 7) для контроля корректирующей способности САП.
Работа приемной системы, реализующей предлагаемый способ, заключается в следующем. Первый комплект приемной аппаратуры 261 (фиг. 7) принимает не задержанный поток ГТС, переданный в эфир передатчиком 111, а второй 262 осуществляет прием того же потока переданной ТМИ, излучение ГТС которого произведено передатчиком 112 и задержано относительно первого потока данных на максимальное время запланированных сбоев, вызванных ожидаемым нарушением радиосвязи. Работа каждого из комплектов приемной аппаратуры идентична и может быть рассмотрена на примере одного из них (фиг. 7).
Приемник 27 принимает по входу 25, i=1, 2 групповой телеметрический сигнал, переданный одним из передатчиков 111 или 112, осуществляет демодуляцию радиосигнала, предварительно переведенного на промежуточную радиочастоту, и выделяет сигналы синхронизации (СС), копии которых перед проведением летных испытаний объектов контроля записывают по входу 35 и хранят в блоке 28 формирования сигналов синхронизации. В блоке 28 формируют следующие синхронизирующие сигналы: тактовой частоты, малого (высокочастотного (ВЧ)) и большого (низкочастотного (НЧ)) телеметрических кадров. Кроме того, в блок 28, используя управляющий вход 35, записывают планируемые временные интервалы замены кодовых конструкций сигналов синхронизации и их составных частей или кодовых сегментов для повышения устойчивости системы синхронизации в случае радиоэлектронного противодействия (РЭП). Примеры подобных СС и различные варианты их изменений в ходе летных испытаний контролируемых объектов приведены в патентах [6, 7]. В приемнике 27 по управляющему входу 34 записывают нужный алгоритм программной демодуляции принимаемых ГТС на пониженной промежуточной радиочастоте. Примеры использования различных проблемно-ориентированных алгоритмов программной демодуляции ГТС, ориентированные на системы двоичного кодирования с символами «0», «1» и замещающего его троичного кода с символами S0, S1, S2, приведены в патентах [7-10]. При этом для повышения устойчивости передачи ТМИ в основном и дополнительном передатчиках 111 и 112 используют различные методы модуляции несущей радиочастоты, например, рассмотренные в патентах [7-10]. В блоке 29 из различных копий демодулированного сигнала, например, рассмотренных в патентах [7-10], формируют обобщенный цифровой групповой телеметрический сигнал, представленный символами двоичного кода «0», «1», который поступает по запараллеленным входам 381, 382, …, 38k, в блок 30 «мягкого» декодирования и в блок 311 «жесткого» декодирования. В первом блоке 311 «жесткого» декодирования на основе алгоритма (4) восстанавливают значения телеизмерений Xi без исправления ошибок передачи ТМИ. В блоке 30 «мягкого» декодирования (фиг. 5 и фиг. 7) реализуют последовательность операций (5-9). Исправленные результаты кодирования C/i с уменьшенным числом ошибок ε/i. для подтверждения достоверности сравнивают с подобным значением  полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений. При этом сглаженные в первом блоке 311 «жесткого» декодирования данные
полученным в первом блоке «жесткого» декодирования при использовании алгоритма сглаживания данных телеизмерений. При этом сглаженные в первом блоке 311 «жесткого» декодирования данные  предварительно преобразуют в
предварительно преобразуют в  с использованием алгоритма (3):
с использованием алгоритма (3):

Далее скорректированные значения  поступают на входы второго блока 312 «жесткого» декодирования, на выходе которого формируют исправленные результаты телеизмерений
поступают на входы второго блока 312 «жесткого» декодирования, на выходе которого формируют исправленные результаты телеизмерений
Затем в блоке 32 оценки достоверности определяют отношение:
kε-εi/ε/i.
Вычисленное значение kε по входу 44 записывают в регистратор 33 на носитель ТМИ. Одновременно в блоке 32 оценки достоверности подсчитывают число ошибок, которыми были искажены сигналы синхронизации, поступающие из блока 28 по входу 43. При этом на выходе 45 блока 32 оценки достоверности формируют результаты оценок временных интервалов сбоев при приеме ТМИ.
Технический эффект заключается в возможности исправления до 60% ошибок телеизмерений при малой мощности принимаемых групповых телеметрических сигналов (ГТС), в том числе равной и меньшей уровня чувствительности приемника.
Литература
1. Способ дискретной передачи информации (Патент RU №2434301 от 20.11.2011, бюл. №32).
2. Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360 с.).
3. И.М. Виноградов «Основы теории чисел», М.: Наука, 1972 г.
4. Кукушкин С.С. Теория конечных полей и информатика. Т. 1., М.: Минобороны России, 2003. - 278 с.
5. Современная телеметрия в теории и на практике / Учебный курс, СПб.: Наука и Техника, 2007. - 672 с.
6. Способ синхронизации передаваемых сообщений и сигналов» (Патент RU №2538281 С2, опубликован 10.01.15, бюл. №1).
7. Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления (Патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.).
8. Способ передачи ТМИ и система для его осуществления (Патент RU №2480840 С1, опубл. 25.04.2013, бюл. №21 - 16 с.).
9. Способ передачи информации и устройство для его осуществления (Патент RU №2475861 С1. Опубл. 22.03.2013, бюл. №16. 18 с.).
10. Способ передачи информации и устройство для его осуществления (Патент RU №2461888 С1. Опубл. 20.04.2013, бюл. №27, 15 с.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ОБНАРУЖЕНИЕМ И ИСПРАВЛЕНИЕМ ОШИБОК ПЕРЕДАЧИ | 2017 |
|
RU2658795C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ ДАННЫХ ИЗМЕРЕНИЙ | 2017 |
|
RU2672392C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2739335C1 |
| СПОСОБ ЭКОНОМНОГО ПРЕДСТАВЛЕНИЯ И ПЕРЕДАЧИ БИПОЛЯРНЫХ ДАННЫХ И СИГНАЛОВ | 2017 |
|
RU2649291C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2017 |
|
RU2674809C9 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2586605C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ КОМПЬЮТЕРНЫХ КОДОВ | 2023 |
|
RU2820092C1 |
Изобретение относится к телеметрии, технике связи и может быть использовано в системах передачи информации по цифровым каналам связи. Технический результат состоит в повышении помехозащищенности передаваемой информации; а также в обеспечении контроля и исправления ошибок, обусловленных действием помех различного происхождения. В способе и системе для повышения оперативности преобразования значений телеметрируемых параметров используют замещающие операции, обладающие свойствами двоичного кода с использованием ограниченной разрядной сетки представления данных при передаче и обработке измерительной информации. 2 н. и 1 з.п. ф-лы, 12 ил.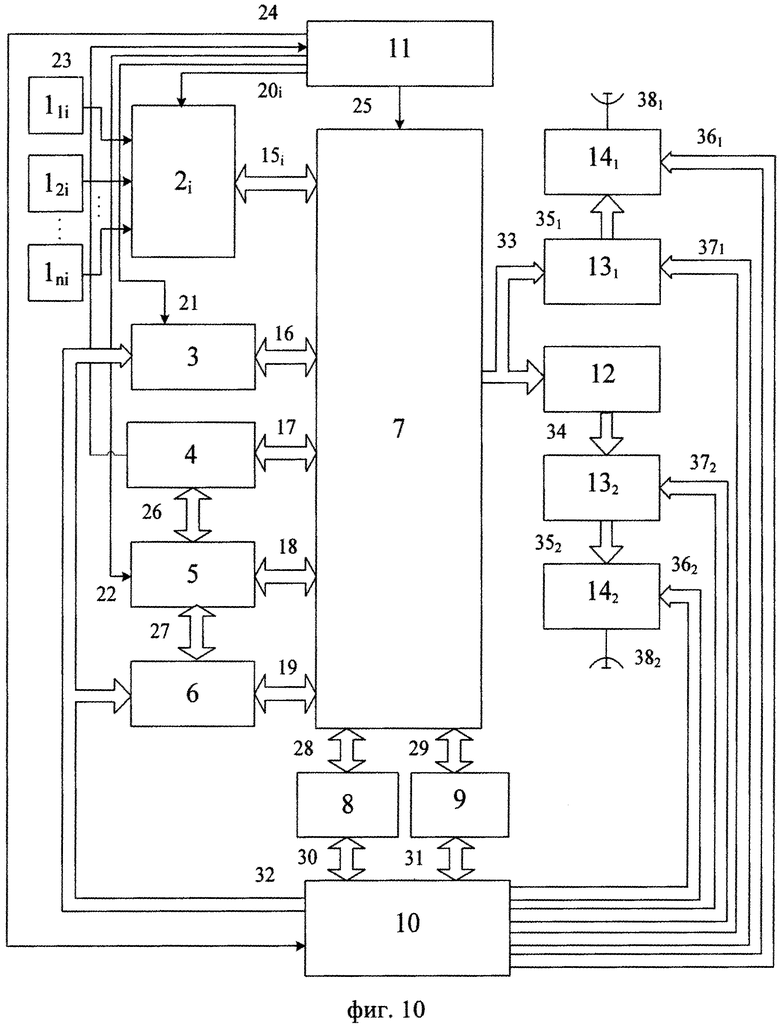
1. Способ передачи информации, заключающийся в том, что на передающей стороне осуществляют сбор сигналов от источников сообщений, преобразуют их в двоичный код, обеспечивают синхронизацию сформированных слов-измерений, представленных N-разрядным двоичным кодом, и формируют из них уплотненный цифровой групповой сигнал, подлежащий передаче по каналам связи, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, отличающийся тем, что на передающей стороне кодовую конструкцию сформированных слов-измерений разделяют на составные части или кодовые сегменты, которые переставляют местами с образованием нового сообщения о результатах телеизмерений, с таким же числом разрядов N, как и исходные слова-измерения, но с другим значением минимального кодового расстояния между соседними значениями, полученными в результате первичного кодирования результатов телеизмерений двоичным кодом, расставляют их в уплотненном цифровом групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, в том числе и в той последовательности, в которой должны были бы передаваться исходные слова-измерения, сформированный таким образом цифровой уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность слов-измерений или сообщений, осуществляют параллельное их декодирование с использованием «жесткого» и «мягкого» декодеров, при этом в результате операции «мягкого» декодирования определяют графические фрагменты закодированных на основе перестановки составных частей или кодовых сегментов первоначальных значений телеметрируемых параметров, заключенные между соседними максимальными значениями абсолютных разностей δjM=|Cj-C(j+1)|≥0,8×2N, и δ(j+s)M=|C(j+s)-C(j+s)+1|≥0,8×2N), равными или большими значений 0,8×2N, где Cj - результат дополнительного безызбыточного помехоустойчивого кодирования j-того по принятому порядку счета слова-измерения или сообщения Xj, a δjM=|Cj-Cj+1| и δ(j+s)M=|C(j+s)-C(j+s)+1| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений Cj, Cj+1, определяющие начало закодированного графического фрагмента, и C(j+s), C(j+s)+1, определяющие окончание графического фрагмента, включающего в себя s выборок, закодированных на основе перестановки составных частей значений телеметрируемых параметров, при этом N - это число разрядов, которые используют для представления слов-измерений или сообщений Xj, обеспечивают обнаружение и исправление ошибок передачи значений телеметрируемых параметров на основе групповых свойств «равноостаточности», которые должны быть постоянными при отсутствии ошибок передачи информации в выделенных закодированных графических фрагментах телеметрируемого параметра, преобразованного при дополнительном помехоустойчивом кодировании на передающей стороне, а в результате операции «жесткого» декодирования осуществляют восстановление первоначальных результатов телеизмерений без исправления ошибок путем обратной перестановки составных частей, разрядность которых известна на приемной стороне, осуществляют сглаживание или фильтрацию восстановленных в результате «жесткого» декодирования данных и по отношению к вычисленным соседним значениям телеизмерений определяют их разности, которые при выполнении операций «мягкого» декодирования с учетом разрешенных позиций для значений принятого безызбыточного помехоустойчивого кода используют в качестве допусков при выборе наиболее подходящих, кондиционных значений восстанавливаемых данных телеизмерений, определяемых в соответствии с принятым критерием достоверности, производят повторное «жесткое» декодирование данных телеизмерений, скорректированных в результате операций «мягкого» декодирования, сглаженные или отфильтрованные данные, полученные при первой операции «жесткого» декодирования сравнивают с синхронными, совпадающими по времени опроса, значениями, полученными в результате второй операции «жесткого» декодирования, результаты сравнения используют для оценивания достигаемого технического эффекта в виде оценок повышения показателей достоверности приема телеметрической информации, а также для сравнения полученных результатов и корректировки значений сглаживания или фильтрации данных телеизмерений, полученных при первом «жестком» декодировании, определяют их близость к другим разрешенным позициям помехоустойчивого кода, сформированного при дополнительном кодировании телеметрируемого параметра на передающей стороне, в результате чего реализуют расширенные возможности, используемые для контроля достоверности полученных результатов телеизмерений и информационной поддержки принятия решений.
2. Способ по п. 1, отличающийся тем, что при выполнении операций «мягкого» декодирования принятые с ошибками данные телеизмерений, преобразованные на передающей стороне с использованием дополнительного кодирования результатов телеизмерений, приводящих к дополнительному безызбыточному помехоустойчивому кодированию и принадлежащие выделенным графическим фрагментам преобразованных телеметрируемых параметров, подвергают делению на первый модуль сравнения m3, равный реализованному в результате дополнительного помехоустойчивого кодирования минимальному кодовому расстоянию dmin=2n при N=2n или dmin=2n+k при N=2n+k, где N - число двоичных разрядов в исходном двоичном коде слов-измерений или сообщений, k=0, 1, 2, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде постоянства значения группового свойства «равноостаточности», наблюдаемого в пределах выделенного графического фрагмента, выбирают в сформированной статистической выборке, состоящей из остатков, полученных в результате операции деления на первый модуль сравнения m3, наиболее часто встречающееся значение, которое рассматривают в качестве кандидата в инварианты, при этом все другие значения остатков, не совпадающие со значением найденного кандидата-инварианта, используют в качестве признака обнаружения ошибок передачи результатов телеизмерений, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на первый модуль сравнения m3 дают значение остатка, равное установленному значению кандидата-инварианта, найденному для выделенного графического фрагмента, выбирают среди выделенных преобразованных данных телеизмерений значения, принадлежащие наиболее близким по абсолютной величине разрешенным позициям сформированного на передающей стороне дополнительного помехоустойчивого кода, которые отстоят друг от друга на величину, равную lm3, m3=dmin, l=1, 2, 3, … где dmin - минимальное кодовое расстояние реализованного на передающей стороне дополнительного помехоустойчивого кода, при выполнении условия, что величины различий принятых данных от их номинальных значений, определяемых априорно известными разрешенными позициями реализованного на передающей стороне дополнительного помехоустойчивого кода, не выходят за пределы допусков, которые устанавливают на основе результатов «жесткого» декодирования принятых сигналов и последующего их сглаживания или фильтрации на основе различных способов сглаживания или фильтрации.
3. Система для передачи информации, реализующая предлагаемый способ, содержит на передающей стороне датчики, локальные коммутаторы, бортовой цифровой вычислительный комплекс, бортовую аппаратуру потребителей, блок синхронизации, блок переключения режимов формирования телеметрических кадров, блок формирования телеметрического кадра и передатчик, на приемной стороне в состав системы входят приемник, блок формирования сигналов синхронизации, блок формирования цифрового группового телеметрического сигнала, отличающаяся тем, что на передающей стороне введены блок переключения режимов формирования телеметрических кадров, блок структурно-алгоритмических преобразований, реализующий изменение формата телеметрических кадров и выбор алгоритма преобразования для обеспечения обнаружения и исправления ошибок передачи при дополнительном безызбыточном кодировании, блок задержки, первый и второй блоки дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, дополнительный передатчик, а на приемной стороне введены блок «мягкого» декодирования, обеспечивающий обнаружение и исправление ошибок передачи, первый и второй блоки «жесткого» декодирования, обеспечивающие восстановление первоначальных значений телеизмерений без исправления ошибок путем обратной перестановки составных частей или кодовых сегментов, блок оценки достоверности, к каждому из локальных коммутаторов подключены выходы п датчиков, интерфейсные входы-выходы которых подключены к первому входу блока формирования телеметрического кадра, второй, третий, четвертый, пятый и шестой входы которого подключены к интерфейсному входу-выходу бортового цифрового вычислительного комплекса, бортовой аппаратуры потребителей, блока синхронизации, блока переключения режимов формирования телеметрических кадров и блока структурно-алгоритмических преобразований, соответственно, кроме того, бортовой цифровой вычислительный комплекс и блок переключения режимов формирования телеметрических кадров объединены между собой интерфейсом обмена данными, бортовая аппаратура потребителей и блок синхронизации объединены между собой интерфейсом обмена данными, также блок синхронизации и блок переключения режимов формирования телеметрических кадров объединены между собой интерфейсом обмена данными, управляющий вход бортовой подсистемы соединен с объединенными управляющими входами блока переключения режимов формирования телеметрических кадров и блока структурно-алгоритмических преобразований, выход блока формирования телеметрического кадра соединен с объединенными входами блока задержки и первого блока дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, выход которого подключен ко входу передатчика, на выходе которого формируют не задержанный поток передаваемой телеметрической информации, выход блока задержки соединен со входом второго блока дополнительного кодирования и первичной модуляции групповых телеметрических сигналов, выход которого подключен ко входу дополнительного передатчика, на выходе которого формируют задержанный поток передаваемой телеметрической информации, на приемной стороне введен дополнительный комплект приемной аппаратуры, при этом в каждый из комплектов приемной аппаратуры входят приемник, блок формирования сигналов синхронизации, блок формирования цифрового группового телеметрического сигнала, регистратор и дополнительно введены блок «мягкого» декодирования, k входов которого объединены соответствующими k входами первого блока «жесткого» декодирования и подключены к соответствующим k выходам блока формирования цифрового группового телеметрического сигнала, вход которого соединен с первым выходом приемника, второй выход которого подключен к первому входу блока формирования сигналов синхронизации, первый выход которого подключен ко второму входу приемника, первый вход которого является информационным, а третий вход управляющим, управляющим также является и второй вход блока формирования сигналов синхронизации, второй выход которого подключен к дополнительному входу блока оценки достоверности, первая группа из k входов которого объединена с соответствующей первой группой входов регистратора и подключена к соответствующим выходам второго блока «жесткого» декодирования, k входов которого соединены с соответствующими k выходами блока «мягкого» декодирования, вторая группа из k входов блока оценки достоверности объединена с соответствующей второй группой входов регистратора и подключена к соответствующим выходам первого блока «жесткого» декодирования, (k+1) выход которого соединен с (k+1) выходом блока «мягкого» декодирования, первый и второй выходы блока оценки достоверности подключены к соответствующим дополнительным входам регистратора.
| СПОСОБ ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2434301C1 |
| RU2013113085А, 27.09.2014 | |||
| СПОСОБ КОМПРЕССИИ-ДЕКОМПРЕССИИ ДАННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488960C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6441810 B1, 27.08.2002. | |||

