Изобретение относится к системам обработки информации, искаженной помехами. Его использование позволяет повысить достоверность принятой информации за счет ее обработки на основе прикладного математического аппарата конструктивной теории конечных полей ([1], Кукушкин С.С. Теория конечных полей и информатика. Т.1. Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках, М: Минобороны России, 2003. – 284с.). В отличие от других математических методов его использование позволяет обнаруживать возникающие при передаче ошибки, как одиночные, так и кратные.
Наиболее близким аналогом к данной заявке на изобретение является([2], «Способ передачи информации», патент №2609747, приоритет от 13.08.2017г.).
Он заключается в том, что на передающей стороне осуществляют сбор сигналов от источников сообщений, преобразуют их в двоичный код, обеспечивают синхронизацию сформированных слов-измерений, представленных N – разрядным двоичным кодом, и формируют из них уплотненный цифровой групповой сигнал, подлежащий передаче по каналам связи, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода. От своих наиболее близких аналогов([3], «Способ передачи информации и система для его осуществления», патент RU №2586605, приоритет от 22.03.2013г., [4] «Способ передачи информации и система для его осуществления», патент RU №2586833, приоритет 15.08.2015г.), данный способ отличается тем, что на передающей стороне кодовые конструкции, сформированные на первом этапе кодирования слов-измерений или сообщений традиционным позиционным двоичным кодом, разделяют на полуслова с равным числом двоичных разрядов или на другие части, имеющие различное число разрядов при их представлении двоичным кодом, которые затем переставляют местами с сохранением прежней разрядности представления слов-измерений или сообщений, но с получением их новых значений, сформированные слова-измерения или сообщения расставляют в уплотненном групповом телеметрическом сигнале в определенной последовательности по отношению к сигналам синхронизации, сформированный таким образом уплотненный групповой телеметрический сигнал подвергают последующей модуляции и передаче, а на приемной стороне принимают полученную последовательность переданных символов двоичного кода, формируют восстановленную последовательность слов-измерений или сообщений, осуществляют параллельное их декодирование с использованием «жесткого» и «мягкого» декодеров, при этом в результате операции «мягкого» декодирования определяют графические фрагменты закодированных на основе перестановки составных частей или кодовых сегментов первоначальных значений телеметрируемых параметров, заключенные между соседними максимальными значениями абсолютных разностей δjМ = | Cj – C(j+1)| ≥ 0,8 × 2N, и δ(j+s)М = |C(j+s) – C(j+s)+1| ≥ 0,8 × 2N), равными или большими значений 0,8 × 2N, где Cj – результат дополнительного безызбыточного помехоустойчивого кодирования j –того по принятому порядку счета слова-измерения или сообщения Хj; δjМ= |Cj - Cj+1| и δ(j+s)М = |C(j+s) - C(j+s)+1| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений Cj, Cj+1, определяющие начало графического фрагмента, и C(j+s), C(j+s)+1, определяющие окончание графического фрагмента, включающего в себя s выборок закодированных на основе перестановки составных частей значений телеметрируемых параметров, а N – число разрядов, которые используют для представления слов-измерений или сообщений Хj, обеспечивают обнаружение и исправление ошибок передачи значений телеметрируемых параметров на основе групповых свойств «равноостаточности», которые должны быть постоянными при отсутствии ошибок передачи информации в выделенных графических фрагментах телеметрируемого параметра, преобразованного при дополнительном помехоустойчивом кодировании на передающей стороне, а в результате операции «жесткого» декодирования осуществляют восстановление первоначальных результатов телеизмерений без исправления ошибок путем обратной перестановки составных частей, разрядность которых известна на приемной стороне, осуществляют сглаживание или фильтрацию восстановленных в результате «жесткого» декодирования данных и по отношению к вычисленным соседним значениям телеизмерений определяют их разности, которые при выполнении операций «мягкого» декодирования с учетом разрешенных позиций для значений принятого безызбыточного помехоустойчивого кода используют в качестве допусков при выборе наиболее подходящих, кондиционных значений восстанавливаемых данных телеизмерений, определяемых в соответствии с принятым критерием достоверности, производят повторное «жесткое» декодирование данных телеизмерений, скорректированных в результате операций «мягкого» декодирования, сглаженные или отфильтрованные данные, полученные при первой операции «жесткого» декодирования сравнивают с синхронными, совпадающими по времени опроса, значениями, полученными в результате второй операции «жесткого» декодирования, результаты сравнения используют для оценивания достигаемого технического эффекта в виде оценок повышения показателей достоверности приема телеметрической информации, а также для сравнения полученных результатов и корректировки значений сглаживания или фильтрации данных телеизмерений, полученных при первом «жестком» декодировании, определяют их близость к другим разрешенным позициям помехоустойчивого кода, сформированного в результате структурно-алгоритмических преобразований значений телеметрируемого параметра на передающей стороне, в результате чего реализуют расширенные возможности, используемые для контроля достоверности полученных результатов телеизмерений и информационной поддержки принятия решений.
Способ-прототип [2] по п. 1, отличается также тем, что при выполнении операций «мягкого» декодирования, предназначенного для обнаружения и исправления ошибок передачи телеметрической информации находят разрывы, определяющие границы графических фрагментов телеметрируемых параметров, преобразованных на передающей стороне с использованием алгоритмов структурно-алгоритмического преобразования данных телеизмерений на основе перестановки составных частей исходных N – разрядных кодовых конструкций данных телеизмерений, полученных в результате первичного кодирования и представляющих собой значения выборок контролируемого процесса в моменты времени опроса значений телеметрируемых параметров, определяемые в соответствии с теоремой дискретизации В.А.Котельникова, затем, используя признаки идентификации разрывов в виде разностей первого порядка между последующими и предшествующими значениями преобразованного телеметрируемого параметра, определяют те их абсолютные значения, которые попадают в интервал (0,8 – 1) m1, где m1 – определенным образом выбранный второй модуль сравнения, равный 2N, где N – число разрядов двоичного кода, используемого для представления слов-измерений, принятые с ошибками данные телеизмерений, преобразованные на передающей стороне с использованием алгоритмов перестановки составных частей исходных слов-измерений, принадлежность которых к выделенным графическим фрагментам контролируемого телеметрируемого параметра подтверждена при приеме, подвергают делению на первый модуль сравнения m1, равный 2k, где k – число разрядов кодовой конструкции составной части исходного слова-измерения, называемой младшей в соответствии с позиционной его структурой при исходном первичном кодировании, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде группового значения «равноостаточности», выбирают в сформированной статистической выборке, состоящей из остатков, наиболее часто встречающееся значение, при этом все другие значения остатков, не совпадающие со значением найденного инварианта, используют для обнаружения ошибок передачи результатов телеизмерений, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на второй модуль сравнения m2 дают значение остатка, равное инварианту, найденному для выделенного графического фрагмента, выбирают среди выделенных преобразованных данных телеизмерений те значения, что принадлежат наиболее близким по абсолютной величине разрешенным позициям, отстоящим друг от друга на величину, равную lm2 , m2 = dmin, l = 1,2,3,.., dmin – минимальное кодовое расстояние, при выполнении условия, что величины различий принятых данных от их номинальных значений, определяемых разрешенными позициями, не выходят за пределы допусков, которые определяют на основе результатов «жесткого» декодирования принятых сигналов и последующего их сглаживания или фильтрации на основе различных способов сглаживания или фильтрации.
Сущность изобретения-прототипа [2] заключается в том, что дополнительное экономное безызбыточное помехоустойчивое кодирование результатов телеизмерений реализуют на основе структурно-алгоритмических преобразований (САП), которые осуществляют при передаче телеметрической информации (ТМИ) на борту контролируемого объекта (в этом случае САП называют «прямыми» (ПСАП)) и при ее приеме (реализуемые при этом САП называют «обратными» (ОСАП)).
Алгоритм дополнительного экономного безызыточного помехоустойчивого кодирования исходных слов-измерений и сообщений Хj, представленный в результате его разделения на составные части <а2j>2 и <а1j>, в результате которого выделяют кодовый сегмент <а2j>2, являющийся старшим при исходном позиционном представлении Хj двоичным кодом, и кодовый сегмент <а1j>2 , который рассматривают в силу его позиционного положения в качестве младшего:
Хj = < <а2j>2, <а1j>2 >2. (1)
Дополнительное безызыточное помехоустойчивое кодирование исходных слов-измерений и сообщений Хj производят путем перестановки местами выделенных старшего (а2j) и младшего (а1j) кодовых сегментов:
Cj = < <а1j>2, <а2j>2 >2, (2)
где Cj – результат дополнительного безызбыточного помехоустойчивого кодирования слов-измерений и сообщений Хj.
Недостаток способа [2] заключается в том, что он предполагает необходимость реализации ПСАП на борту контролируемого объекта, а это не всегда возможно по различным причинам. В их числе необходимость доработки программно-математического обеспечения и его прошивки в бортовой радиотелеметрической системе (БРТС), также консервативный подход и экономические соображения. Но в то же время причины большого числа аварийных и нештатных ситуаций, произошедших за последнее время при пусках ракет и запусках ракет-носителей, остаются не раскрытыми из-за крайне низких показателей достоверности полученной при этом телеметрической информации (ТМИ). Существующая телеметрия, основы построения которой были разработаны еще при СССР, не была рассчитана на нештатные и аварийные ситуации, поскольку они представляли собой по сравнению с существующей практикой редкие события.
Также один из недостатков заключен в том, что при использовании операции «мягкого» декодирования определяют графические фрагменты закодированных на основе перестановки составных частей или кодовых сегментов первоначальных значений телеметрируемых параметров, заключенные между соседними максимальными значениями абсолютных разностей δjМ = | Cj – C(j+1)| ≥ 0,8 × 2N, и δ(j+s)М = |C(j+s) – C(j+s)+1| ≥ 0,8 × 2N), равными или большими значений 0,8 × 2N, где Cj – результат дополнительного безызбыточного помехоустойчивого кодирования j –того по принятому порядку счета слова-измерения или сообщения Хj; δjМ= |Cj - Cj+1| и δ(j+s)М = |C(j+s) - C(j+s)+1| - соседние максимальные значения абсолютных разностей между результатами дополнительного безызбыточного помехоустойчивого кодирования слов-измерений или сообщений Cj, Cj+1, определяющие начало графического фрагмента, и C(j+s), C(j+s)+1, определяющие окончание графического фрагмента, где s – число отсчетов в выделенном графическом фрагменте. Однако в нештатных и аварийных ситуациях границы графических фрагментов должны определяться не только на основе максимальных значений абсолютных разностей δjМ = | Cj – C(j+1)| ≥ 0,8 × 2N и δ(j+s)М = |C(j+s) – C(j+s)+1| ≥ 0,8 × 2N), равных или больших значений 0,8 × 2N, но при других значениях δjМ и δ(j+s)М . Это связано с тем, что уровень искажений переданной ТМИ может быть более значительным. Кроме того, при обработке данных телеизмерений фактор времени определен не так жестко, как в случае передачи и приема ТМИ, поэтому существует возможность подбора наиболее подходящего порога для абсолютных разностей δjМ = | Cj – C(j+1)| и δ(j+s)М = |C(j+s) – C(j+s)+1|.
Основная сущность предлагаемого изобретения заключается в том, чтобы ПСАП и ОСАП использовать при обработке уже полученной ТМИ низкого качества для повышения показателей ее достоверности, достаточных, в том числе, для установления причин нештатных и аварийных ситуаций.
Основу предлагаемого изобретения составляет эффект увеличения минимального кодового расстояния dmin при использовании ПСАП (дополнительного помехоустойчивого кодирования).
Если взять соседние значения данных телеизмерений при числе разрядности двоичных слов-измерений и сообщений, равной N = 2n = 8, например, Х1 =<115>10 = <01110011>2 и Х2 =<116>10 = <01110100>2, то при традиционных способах их представления кодовое расстояние между ними будет равно dmin(тр) = 1. При этом в соответствии с теорией помехоустойчивого кодирования отсутствует возможность обнаружения ошибок передачи ТМИ ([5], Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. - 360с.).
При использовании способа [2], минимальное кодовое расстояние увеличили до значения dmin(Пер) = 2n = 24 = 16.
При использовании способа [3] и выборе модулей сравнения m1 = 15 и m2 = 17, получим: С1 =<10101101>2 = <173>10 и С2 = <10111110>2=<190>10. В результате минимальное кодовое расстояние увеличилось в k = 2n+1 раз и стало при n = 4 равным dmin(СОК) = 17. В результате этого обеспечивается возможность обнаружения и исправления ошибок передачи ТМИ. Увеличение минимального кодового расстояния (d) в 17 раз в соответствии с теорией помехоустойчивого кодирования обеспечивает возможность исправления до 4 ошибок передачи значений ТМП.
Сущностные характеристики предлагаемого способа заключаются в следующем. Он предполагает использование ПСАП, которое представляет собой дополнительное кодирование значений слов-измерений Хj, не на передающей стороне, а на приемной стороне после восстановления принятых данных Хj*, когда из-за помех они будут отличаться от исходных данных, полученных при телеизмерениях, на величину ошибки ε j: Хj* = Хj + ε j.
В случае предлагаемого исходного кодирования данных Хj N = 2n разрядным двоичным кодом, которые в соответствии с алгоритмом дополнительного безызбыточного помехоустойчивого кодирования, составляющим основу изобретения [2], рассматривают как состоящие из двух n-разрядных полуслов <а2j>2 и <а1j>2 , следующими при передаче друг за другом, ошибку телеизмерений (εj) следует представить в виде: ε j = ε 2j ×2n + ε 1j, где ε 1j – ошибка приема младшего полуслова <а1j>2 исходного слова, а ε 2j – ошибка приема старшего полуслова <а2j>2 принятого слова Хj*:
<Хj*>2 = < <а2j*>2, <а1j*>2 >2, (1*)
где <>2 – это символ представления данных Хj* двоичным позиционным кодом, при этом старшее и младшее полуслова <а2j*>2 и <а1j*>2 условно рассматриваются как независимые кодовые сегменты.
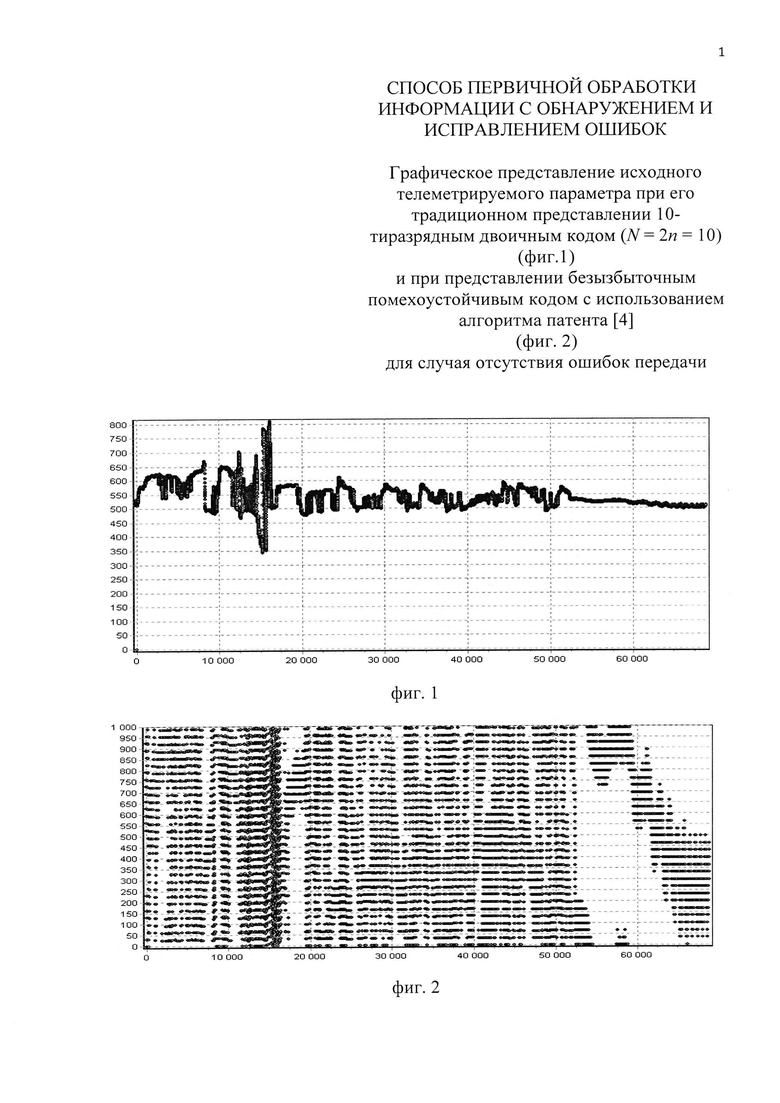
При приеме информации существующими наземными приемно-регистрирующими станциями (НПРС) получаемые данные рассматривают как целое слово-измерение или сообщение, имеющее разрядность N и единую позиционную структуру их представления. В этом случае минимальное кодовое расстояние равно: dmin(1) = 1, поскольку соседние значения ТМП могут отличаться только на 1. В результате этого исходное графическое представление данных, полученных при приеме и зарегистрированных НПРС в условиях отсутствия искажений помехами, имеет вид, приведенный на фиг. 1. Те же данные телеизмерений, но после дополнительного безызбыточного прямого структурно-алгоритмического преобразования (ПСАП), отображаются в виде, представленном на фиг. 2. При этом на фиг. 2 представлен результат ПСАП в случае дополнительного безызбыточного помехоустойчивого кодирования в БРТС, когда искажений данных помехами не было. Для данного случая минимальное кодовое расстояние при исходной разрядности слов-измерений или сообщений, равной N = 2n = 10, - dmin(2) = 2n + 1 = 25 + 1 = 33 при использования алгоритмов ПСАП патентов [3, 4] и dmin(2) = 2n = 25 = 32 при реализации алгоритма дополнительного помехоустойчивого кодирования патента [2].
В последнем случае принятые закодированные слова-измерения и сообщения представляют собой результаты восстановления данных телеизмерений с младшими <а1j*>2 и старшими полусловами <а2j*>2, искаженными помехами и переставленными местами:
<Cj*>2 = < <а1j*>2; <а2j*>2 >2 = <Сj>2 + <сj>2 (2*)
В результате этого каждое из принятых закодированных слов-измерений и сообщений <Cj*>2 будет отличаться от истинных, неискаженных их копий, на величину ошибки <сj>2.
Из сравнения графических представлений неискаженного телеметрируемого параметра (ТМП) (фиг. 1) следует, что в результате дополнительного безызбыточного помехоустойчивого кодирования (фиг. 2) обеспечивают появление следующих сущностных характеристик:
1) повышение эффективности использования выделенной разрядной сетки представления данных, ограниченной в рассматриваемом случае 10-тиразрядным двоичным кодом в k = 1024/550 = 1,7 раз;
2) увеличение минимального кодового расстояния в 33 раза: dmin(2) = 33, что проявляется в четко обозначившихся на иллюстрации М разрешенных 31 позициях для значений кодовых конструкций (М=31).
При этом различают следующие три основных случая использования способов [2-4].
Первый из них ориентирован на реализацию алгоритмов ПСАП на передающей стороне в бортовой радиотелеметрической системе (БРТС) и алгоритмов ОСАП при приеме информации в наземной приемно-регистрирующей станции (НПРС). Он описан в патентах [2 - 4].
Второй, ранее не рассмотренный вариант их использования, предполагает, что дополнительному помехоустойчивому кодированию подвергают данные ТМП после того, как они были приняты и восстановлены в НПРС, но не все ошибки <ε j>2 были исправлены. В результате этого первоначальный уровень искажений значений ТМП Xj *= Xj + ε j был уменьшен: Xj /= Xj + ε j/, где ε j/ ≤ ε j. В этом случае при последующей первичной обработке ТМИ входными данными являются не Xj *= Xj + ε j, а Xj /= Xj + ε j/, где ε j/ ≤ ε j.
Еще один вариант использования алгоритмов ПСАП и ОСАП предполагает, что они не реализованы на передающей стороне в БРТС. Однако принятая при этом ТМИ отличается низким качеством и не пригодна для обработки и последующего использования, например, для анализа причин появления нештатных и аварийных ситуаций или результатов летных испытаний контролируемых объектов. Но в случае нештатных и аварийных ситуаций ее ценность многократно увеличивается: принятая ТМИ является уникальной, прежде всего потому, что повторное ее получение не представляется возможным. В результате причинно-следственные связи, которые привели к нештатным ситуациям и авариям, как правило, остаются нераскрытыми. Анализ такой типичной для существующей практики телеизмерений ситуации осложнен также тем, что в условиях нештатных и аварийных ситуаций значительно ухудшается качество канала связи, в результате чего существенно увеличивается число привнесенным им ошибок. Получается, что чем выше ценность информации, тем хуже ее качество. Такова объективная реальность.
Поэтому единственный способ реанимации полученной ТМИ низкого качества заключен в исправлении ошибок и искажений, число которых объективно растет при ухудшении энергетических характеристик радиоканала передачи данных. Основные причины ухудшения энергетических характеристик радиоканала передачи данных связаны с увеличением объемов передаваемых данных, ограниченными возможностями в части повышения мощности передающих устройств и чувствительности приемников, а также с ухудшением помеховой обстановки. На разрешение отмеченных противоречий направлено предлагаемое изобретение.
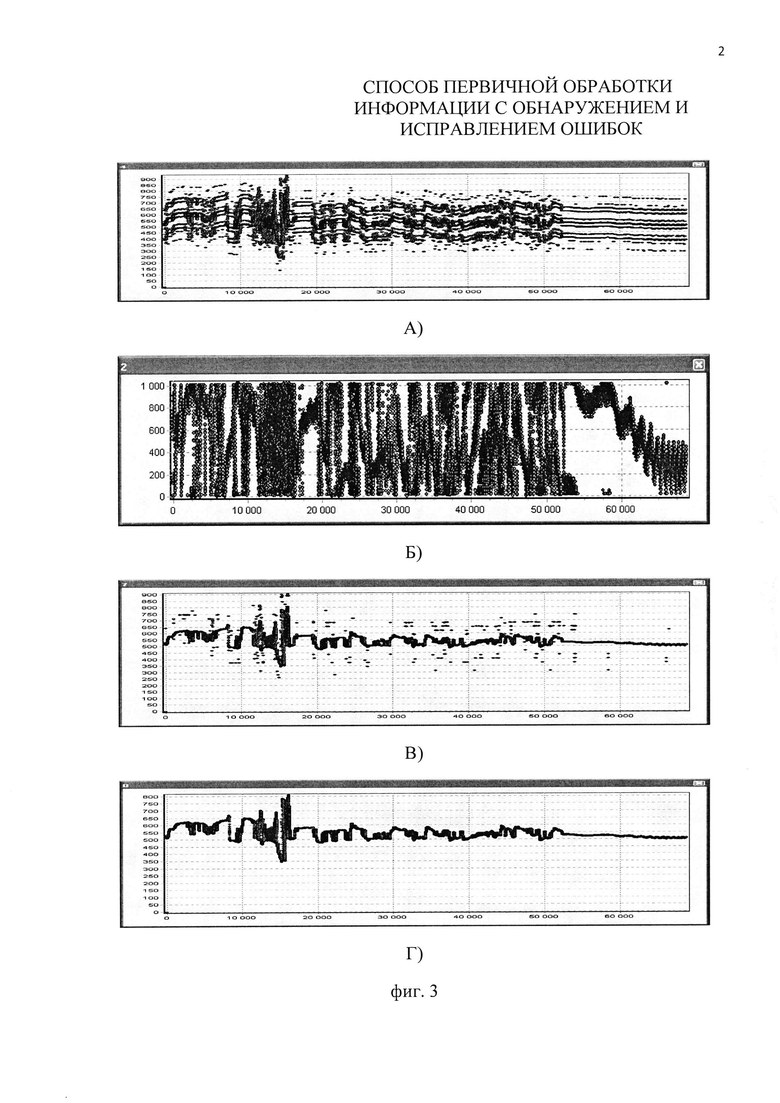
Суть базовых операций, составляющих основу предлагаемого способа, проиллюстрирована на примере, заимствованном из сущствующей практики телеизмерений. Он представлен иллюстрациями, приведенными на фиг. 3.
Из первого графика принятого и восстановленного ТМП (фиг. 3А), исходный вид которого представлен на фиг. 1, следует, что из-за значительных искажений при передаче ТМИ, последующая ее автоматизированная обработка не представляется возможной. Известный способ повышения качества полученной ТМИ предполагает использование операций предварительной обработки принятых данных телеизмерений. Традиционно используемая предварительная обработка ТМИ включает в себя следующие операции: 1) обнаружения и удаления аномальных ошибок; 2) сглаживания данных с использованием различных способов фильтрации.
Однако для принятого ТМП, графическое представление которого приведено на фиг. 3А, использование только существующих способов предварительной обработки не может привести к желаемому результату – повышению точности и достоверности телеизмерений. Использование традиционного подхода к первичной обработке ТМИ, предполагающего обнаружение и удаление аномальных ошибок, значительно уменьшит объем результатов телеизмерений, которые можно условно считать «кондиционными». В результате этого существенно будут ухудшены показатели точности и достоверности телеизмерений.
При использовании предлагаемого изобретения задача первичной обработки принятых значений ТМП заключается, прежде всего, в том, чтобы уменьшить искажающее действие помехи ε j: Xj *= Xj + ε j. Это условие предполагает получение исправленных значений: Xj /= Xj + ε j/, где ε j/ ≤ ε j. Для реализации этой идеи принятые и зарегистрированные данные Xj * = Xj + ε j, на этапе первичной обработки дополнительно кодируют на основе выбранного алгоритма прямых структурно-алгоритмических преобразований (ПСАП), описанных в патентах [2-4]. Затем результаты дополнительного кодирования подвергают обратному структурно-алгоритмическому преобразованию (ОСАП), основу которого составляет универсальный алгоритм «мягкого» декодирования, обеспечивающий обнаружение и исправление ошибок передачи.
В качестве примера рассмотрим применение в качестве ПСАП алгоритма, представленного в способе-прототипе [2]. Но объектом его применения будут не исходные значения слов или сообщений
<Хj>2 = < <а2j>2; <а1j>2 >2
на передающей стороне, которые не искажены (фиг. 1), а принятые в условиях искажений ε j, привнесенных каналом передачи информации (фиг.3А):
<Хj*>2 = < <а2j*>2; <а1j*>2 >2 = Хj + ε j. (1пр)
Здесь построчный индекс (пр) означает, что <Хj*>2 рассматривают, как данные, слова и сообщения, имеющие восстановленную в результате декодирования исходную позиционную структуру представления данных. Обозначение<Хj*>2, как это было условлено, означает, что данные телеизмерений представлены N – разрядным двоичным кодом и получены при традиционном приеме без дополнительного помехоустойчивого кодирования (без использования ПСАП) на борту контролируемого объекта. В существующей практике телеизмерений – это соответствует наиболее часто встречающемуся случаю, когда используемые бортовые радиотелеметрические системы (БРТС) не были модернизированы с учетом патентов [2 - 4].
При этом для пояснения сути изобретения значения <Хj>2 и <Хj*>2 представлены, как состоящие из двух кодовых сегментов <а2j>2, <а1j>2 и <а2j*>2, <а1j*>2, где <а2j>2, <а1j>2 и <а2j*>2, <а1j*>2, рассматривают, как, соответственно, старший (<а2j>2) и младший (<а1j>2) сегменты двоичного кода слов или сообщений <Хj>2 и <Хj*>2, отличающиеся между собой тем, что во втором случае (фиг.3А) они получены при приеме и искажены помехой.
Далее принятые искаженные слова или сообщения (фиг.3А) подвергают дополнительному помехоустойчивому кодированию (ПСАП).
Для способа [2] он наиболее прост и заключается в том, что каждое закодированное слово-измерение или сообщение представляют в виде переставленных местами младшего и старшего сегментов или полуслов:
<Cj*>2 = < <а1j*>2; <а2j*>2 >2 = <Сj>2 + <сj>2 (2пр)
где <сj>2 – трансформированные в результате дополнительного кодирования ошибки <ε j>2.
Графическое представление значений <Хj*>2 ТМП после ПСАП, представляющего собой реализацию алгоритма (2пр), приведено на фиг. 3Б.
При этом ошибку ε j = ε 2j ×2n + ε 1j в закодированном слове или сообщении превращают в ошибку сj = ε 1j ×2n + ε 2j.
Сущность предлагаемого изобретения заключается в том, чтобы обнаружить и исправить ошибки телеизмерений, привнесенные радиоканалом, за счет особенностей трансформации ошибки ε j = ε 2j ×2n + ε 1j в ошибку сj = ε 1j ×2n + ε 2j.
Для иллюстрации того, что при происходит при трансформации ошибки ε j = ε 2j ×2n + ε 1j в ошибку сj = ε 1j ×2n + ε 2j, а также получаемого при этом эффекта, воспользуемся алгоритмом ПСАП, составляющим основу патента [4]:
Сj = (Хi × m3)(mod Ш = 2N) (3)
В соответствии с (3) результаты дополнительного кодирования можно рассматривать и как результат усиления в m3 раз (m3 = 2n+1 = dmin(2)) диапазона представления значений ТМП, который затем ограничивают возможностями представления преобразованных значений в принятой ограниченной разрядной сетке отображения данных (для иллюстраций, приведенных на фиг.1, фиг. 2, фиг. 3, фиг. 4, фиг. 5. фиг. 6, фиг. 7, фиг. 8, фиг. 9, фиг. 10 и фиг.11, она ограничена 10 разрядами двоичного кода (N = 2n = 10)). В результате этого получают «узкие» шкалы представления преобразованного ТМП (фиг. 2, фиг. 5), амплитуда которого при отсутствии помех занимает только разрешенные позиции М, число которых для случая N = 2n = 10, равно М = 2n – 1 = 31. При этом они разнесены между собой на минимальное кодовое расстояние dmin(2) = 2n+1 (фиг. 5). Из-за этого в соответствии с алгоритмом (3) диапазон представления данных телеизмерений, как бы, увеличен в m3 = 2n+1 раз (фиг. 5). Но, поскольку выделенная для представления данных, разрядная сетка равна N = 2n = 10, то усиленная в m3 = 2n+1 раз амплитуда изменения значений ТМП претерпевает разрывы (фиг. 5), которые должны быть выделены при первичной обработке ТМИ.
К подобному эффекту приводят и алгоритмы ПСАП других патентов [2, 4], но там результат, эквивалентный умножению каждого из значений ТМП, на величину минимального кодового расстояния dmin(2) не представлен в явном виде, как это имеет место в случае с формулой (3).
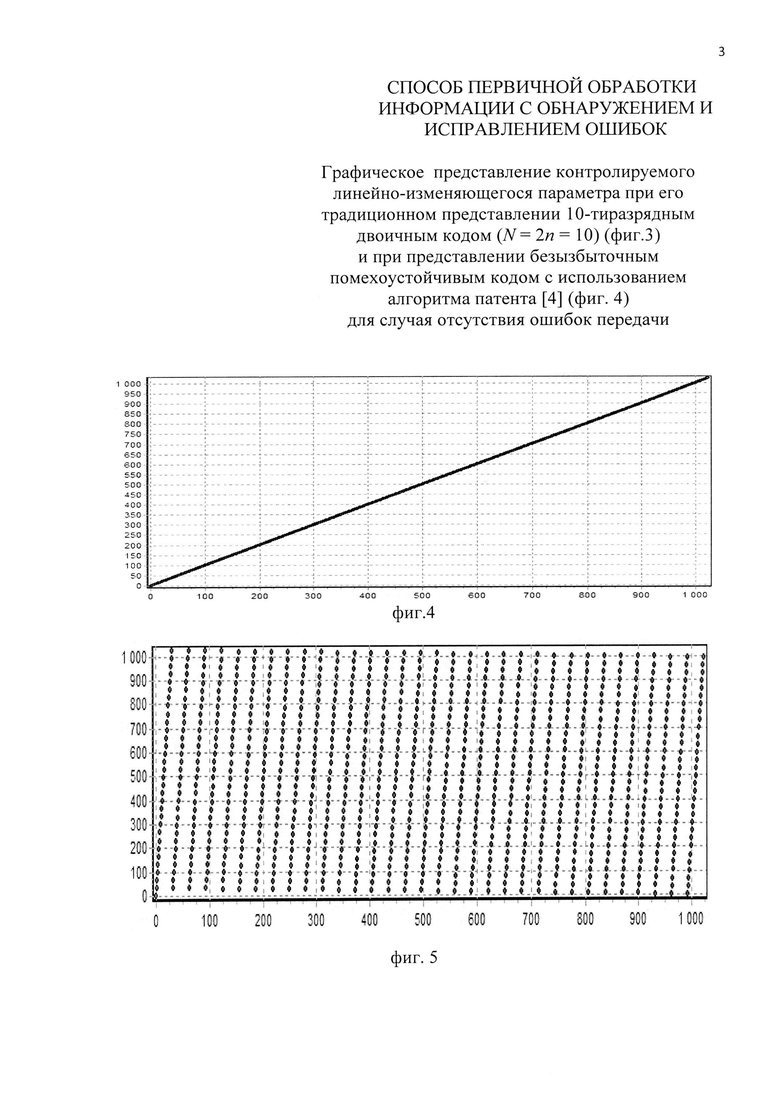
Для пояснения возможности обнаружения ошибок при первичной обработке принятой и зарегистрированной ТМИ необходимо рассмотреть, что происходит при трансформации ошибок ε j = ε 2j ×2n + ε 1j в ошибки сj = ε 1j ×2n + ε 2j. Наиболее просто это можно показать на примере линейно-изменяющегося параметра (фиг. 4), где значения представлены с последовательным увеличением каждого на единицу в пределах выделенной шкалы представления данных Ш = 2N, где N=2n - разрядность слов-измерений (N = 10). После операции ПСАП (дополнительного помехоустойчивого кодирования) (фиг. 5) с использованием алгоритма (3) минимальное кодовое расстояние (dmin(2)) становится равным: dmin(2) = 2n+1 = 25+1 = 33. Это означает, что в преобразованных данных соседние значения отстоят друг от друга не на 1 (одно) (dmin(1)), а на 33 значения (dmin(2)). Но из-за эффекта, эквивалентного усилению их амплитуд (Хj*) (формула (1пр)) в 33 раза при дополнительном кодировании (Сj*) (формула (2пр)), они в 31 раз быстрее достигают значения предельной границы, равной значению <1111111111>2 = <1023>10. В результате этого первоначальное графическое отображение значений ТМП (фиг. 3) претерпевает разрывы, между которыми заключены графические фрагменты данных телеизмерений. В результате этого закодированный ТМП, изображенный на фиг. 5, представлен µ = 33 графическими фрагментами с линейно-изменяющимися значениями в каждом из них. При этом соседние закодированные значения (Сj) отстоят друг от друга на значение минимального кодового расстояния dmin(2) = 2n+1 = 33 (фиг. 5). Это означает, что в каждом из выделенных графических фрагментов количество разрешенных позиций, на которых должны находиться неискаженные помехой сигналы, равно M. Каждая из них удалено от соседней разрешенной позиции на значение минимального кодового расстояния dmin = 2n+1 = 33 (фиг. 5). У полученного помехоустойчивого кода, равно М = 31 (фиг. 5). Результат умножения М = 31 на µ = 33 даст наибольшее значение, равное максимальному значению <1023>10 = <1111111111>2: (М × µ = 31 × 33 = 1023) шкалы (Ш) представления значений ТМП - <Ш>10 = (0 - 1023), <Ш>2 = (<0000000000>2 - <1111111111>2).
Такое же кодовое расстояние dmin(2) = 2n+1 = 33 будет в случае представления данных Хj двумя образами-остатками b1j и b2j (патент [3]).
При использовании алгоритма ПСАП патента [2] минимальное кодовое расстояние, как было отмечено ранее, равно dmin = 2n = 25 = 32. Следовательно, число разрешенных позиций кода будет равно: М = 32, а количество выделенных внутренних графических фрагментов µ = 32. В результате также получим шкалу телеизмерений <Ш>10 = M × μ = 2N = 210 = 1024, что соответствует <Ш>10 = (0 - 1023).
При этом каждый из выделенных графических фрагментов с линейно-изменяющимися значениями можно рассматривать и как «узкую» шкалу представления усиленных по амплитуде в dmin(2) раз значений исходного контролируемого процесса х(t), ограниченную по модулю <Ш>10 = 2N = 210 = 1024, как это следует из алгоритма кодирования (3).
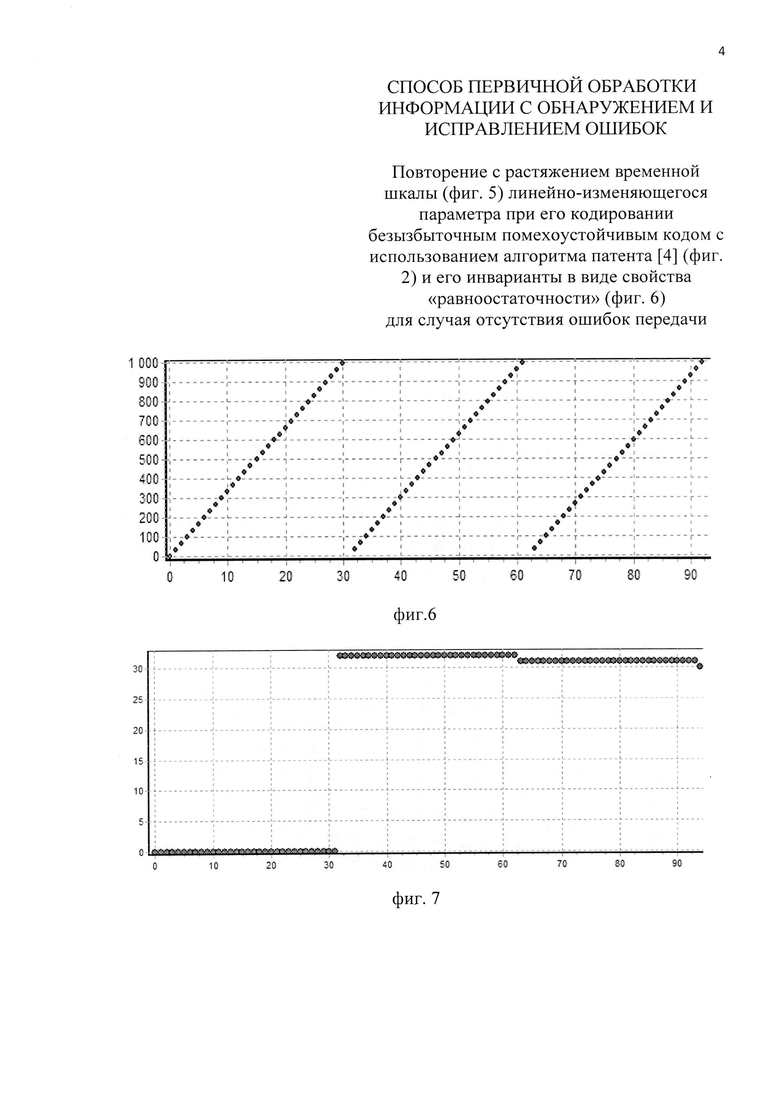
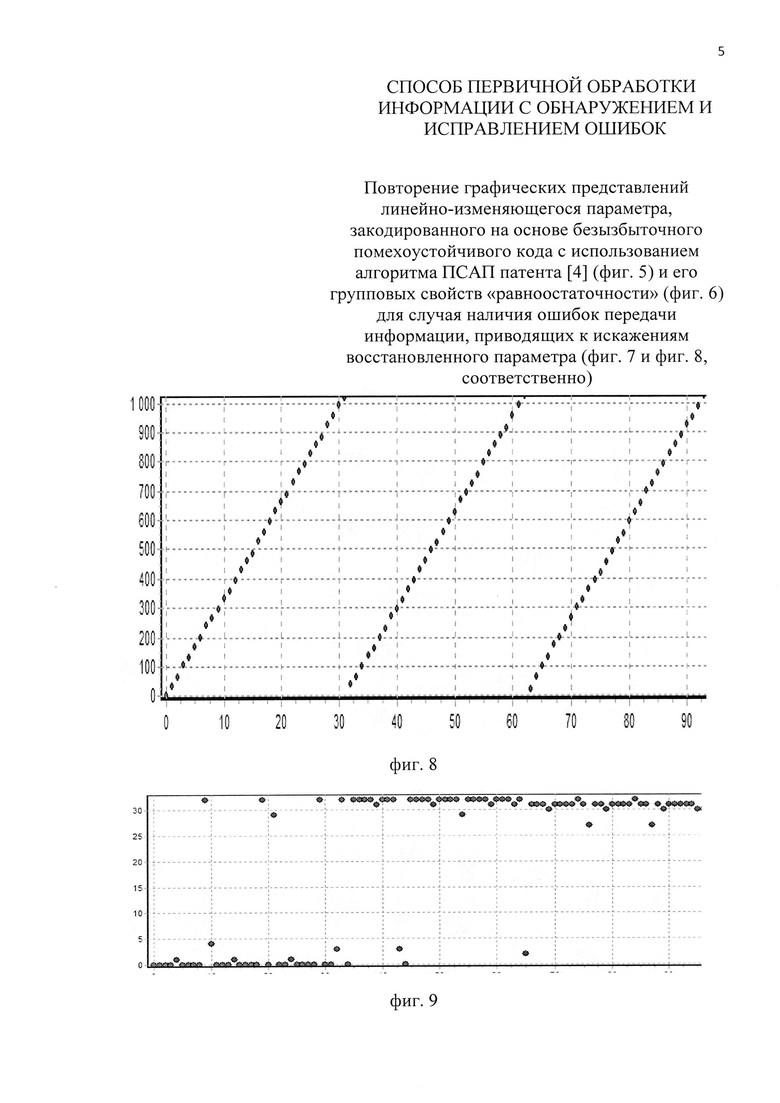
К одной из таких «узких» шкал относятся и графические фрагменты, представленные на фиг. 6, фиг. 7. Они состоят из s закодированных значений <Cj*>2, которые заключены между соседними максимальными абсолютными разностями δjМ* = | Cj* – C(j+1)*| ≥ (0.8 - 1)Ш и δ(j+s)М*= |C(j+s)* – C(j+s)+1*| ≥ (0,8 - 1)Ш. При этом выделенные графические фрагменты с линейно-изменяющимися значениями телеизмерений (фиг. 6) отличаются от представленного на фиг. 5 изображения того же ТМП, другим (увеличенным) масштабом представления временной шкалы. На фиг. 7 приведены значения инвариантов ξk, представленные в виде свойств «равноостаточности» для случая отсутствия ошибок при передаче информации. Групповые свойства «равноостаточности» проявляются в том, что для выделенного k-того графического фрагмента ТМП, закодированного с использованием ПСАП и обозначаемого как Сjk, при отсутствии помех отношение Сjk ≡ ξk(mod dmin) принимает одно и тоже значение, что отображается на фиг. 7 в виде ступенчато-изменяющихся данных. Каждая из изображенных на фиг. 7 ступенек – это значения остатков ξk, представляющее собой группу. Это означает, что любое из закодированных с использованием ПСАП результатов телеизмерений, принятых без ошибок, при делении на значение минимального кодового расстояния dmin(2) даст один и тот же остаток ξk. В этом заключается новое свойство, которое может быть использовано для оценивания достоверности данных, обнаружения и исправления ошибок и искажений восстановленного контролируемого параметра – ТМП. Его называют групповым свойством равноостаточности. Так, при выбранном алгоритме ПСАП значение инварианта ξµ будет для первого из выделенных графических фрагментов (μ =1) равно ξ1 = 0 (фиг. 7). Для следующего за ним второго (μ =2), равно ξ2 = 32. Для третьего графического фрагмента (μ =3) оно уже будет равно ξ3 = 31, для четвертого (μ =4) – ξ4 = 30 и т.д. Для последнего (μ =33) 33 графического фрагмента, представленного на фиг. 5 значения остатков ξ33 будут равны 0 (ξ33 = ξ1 = 0). Это означает, что цикл изменения инвариантов ξµ завершен при (μ =32), а далее следует повторение с индексами μ, полученными в результате сравнений по модулю 32.
Иллюстрации, приведенные на фиг. 8 и фиг. 9, отличаются от их аналогов (фиг. 6) и (фиг. 7), соответственно, наличием ошибок в результатах телеизмерений (результатах представления графических фрагментов линейно-изменяющегося параметра) (фиг. 8) и данных, характеризующих групповое свойство равноостаточности (фиг. 9). Обнаруженные ошибки хорошо видны на фиг. 9, в виде точек (значений остатков ξi) не совпадающих с наиболее часто появляющимися значениями ξµ, где µ - номер выделенного графического фрагмента (µ = 0 – 32) (фиг. 7 и фиг. 9).
При этом основополагающие принципы трансформации ошибок ε j = ε 2j ×2n + ε 1j в ошибки сj = ε 1j ×2n + ε 2j при первичной обработке ТМИ с использованием алгоритмов ПСАП и ОСАП заключаются в следующем.
Если величина ошибки ε j находится в пределах:

где Хj* - восстановленный с ошибками результат телеизмерений,
Ш – шкала представления данных, определяемая разрядностью двоичных слов (N) (для рассматриваемого случая N = 2n = 10, шкала представления данных Ш = (0 - 1023));
dmin(2) – минимальное кодовое расстояние,
то в ошибочно принятом значении Хj* ошибка не будет исправлена.
Это связано с тем, что результат дополнительного кодирования <Cj>2 с учетом первоначального значения ошибки <ε j>2 не выйдет за пределы того графического фрагмента ТМП, ограниченного шкалой представления Ш N-разрядного двоичного кода, двоичные кодовые конструкции которого отстоят друг от друга на dmin(2) = <100001>2 = <33>10 среди возможных их значений от <0000000000>2 до <1111111111>2. К этому графическому фрагменту принадлежат и сами закодированные результаты телеизмерений:
0 ≤ сj ≤ δjМ*, (5)
где δjМ* = |Cj* – C(j+1)*| - максимальная абсолютная разность между закодированными значениями Cj* и C(j+1)*, которая находится внутри выделенного графического фрагмента (фиг. 5, фиг. 6, фиг.7).
Следовательно, при дополнительном помехоустойчивом кодировании <Сj *>2= <Сj>2 + <сj>2 значение ошибки <сj>2 также будет иметь позицию М, разрешенную для данного графического фрагмента ТМП (µ). В результате этого при делении значений Сj *= Сj + сj, закодированного в соответствии с алгоритмом (2) результата телеизмерений Xj * и искаженного ошибкой ε j: Xj *= Xj + ε j, величина которой определена условием (4), будет получен тот же остаток ξµ, где µ - номер выделенного графического фрагмента. Поэтому такого рода ошибки не будут обнаружены и не будут исправлены. Однако, будучи аномальными по своей природе, они при декодировании с использованием алгоритма «мягкого» декодирования, обнаруживающего ошибки на основе группового свойства равноостаточности, будут переведены в разряд нормальных ошибок, имеющих небольшие значения. А это означает, что их можно будет не исключать из исходной статистической выборки полученных значений. Они могут быть исправлены или подправлены при использовании предлагаемого способа на этапе первичной обработки информации. В то же время существующая практика первичной обработки ориентирована на исключение аномальных ошибок телеизмерений. Но, если число их велико, что имеет место, например, в нештатных и аварийных ситуациях, то их исключение существенно понижает достоверность тех оценок, которые получают при анализе полученной измерительной информации.
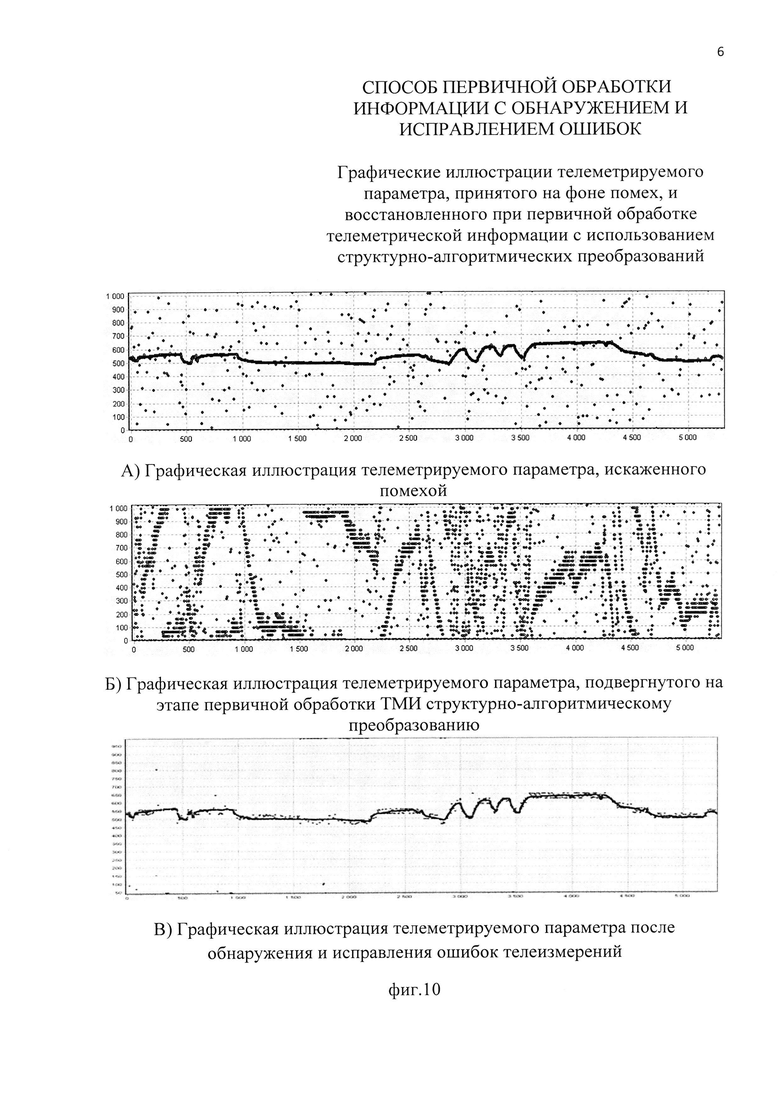
Этот эффект подтвержден результатами экспериментальных исследований, полученных при первичной обработке реальных данных телеизмерений Xj *= Xj + ε j, графическая иллюстрация изменения которых в условиях аномальных ошибок ε jан приведена на фиг. 10А. На фиг. 10Б представлены результаты дополнительного помехоустойчивого кодирования Сj *= Сj + сj, выполненного в соответствии с алгоритмом (2пр), где сjан представлены отдельными точками. На фиг. 10В представлены результаты «мягкого» декодирования с обнаружением и исправлением ошибок: Xj /= Xj + ε j/. На данной иллюстрации (фиг. 10В) видны небольшие значения ошибок ε j/ ≤ ε j, которые могут быть отнесены к разряду нормальных, приводящих к незначительному отклонению значений Xj / от их истинных данных телеизмерений Xj. Экспериментальные данные также подтверждают факт, перевода аномальных ошибок в разряд нормальных при использовании предлагаемого изобретения.
В последующем перевод аномальных ошибок в разряд нормальных может быть эффективно использован при последующей реализации алгоритмов фильтрации. Неисправленные аномальные ошибки в виде отдельных точек Xj /, отстоящих на значительные расстояния от их истинных данных телеизмерений Xj, могут появиться только на границах графических фрагментов μ - 1, μ и μ + 1, что и демонстрируют иллюстрации (фиг. 3B и фиг. 10В).
Для всех остальных исходных данных Xj *= Xj + ε j с ошибками ε j, для которых не выполняется условие (4), результат кодирования Сj *= Сj + сj, будучи поделенным на значение минимального кодового расстояния dmin(2), не будет принадлежать тому графическому фрагменту μ, в котором действительно находится результат телеизмерений Xj *. Он будет принадлежать другим графическим фрагментам k, поскольку его остаток будет не ξµ, а ξk (ξk ≠ ξµ). А это означает, что ошибка ε j будет обнаружена и исправлена. Таков механизм обнаружения и исправления ошибок телеизмерений, который реализуют на этапе первичной обработки ТМИ.
На фиг. 3В, для более динамично изменяющегося ТМП, по сравнению с приведенным на фиг. 10В, представлены результаты его декодирования с обнаружением и исправлением ошибок телеизмерений. На первом этапе его обработки с использованием ПСАП и ОСАП получен результат, приведенный на фиг. 3В. На нем видны аномальные ошибки, в виде отдельных точек, которые появились на границах графических фрагментов
μ - 1, μ и μ + 1.
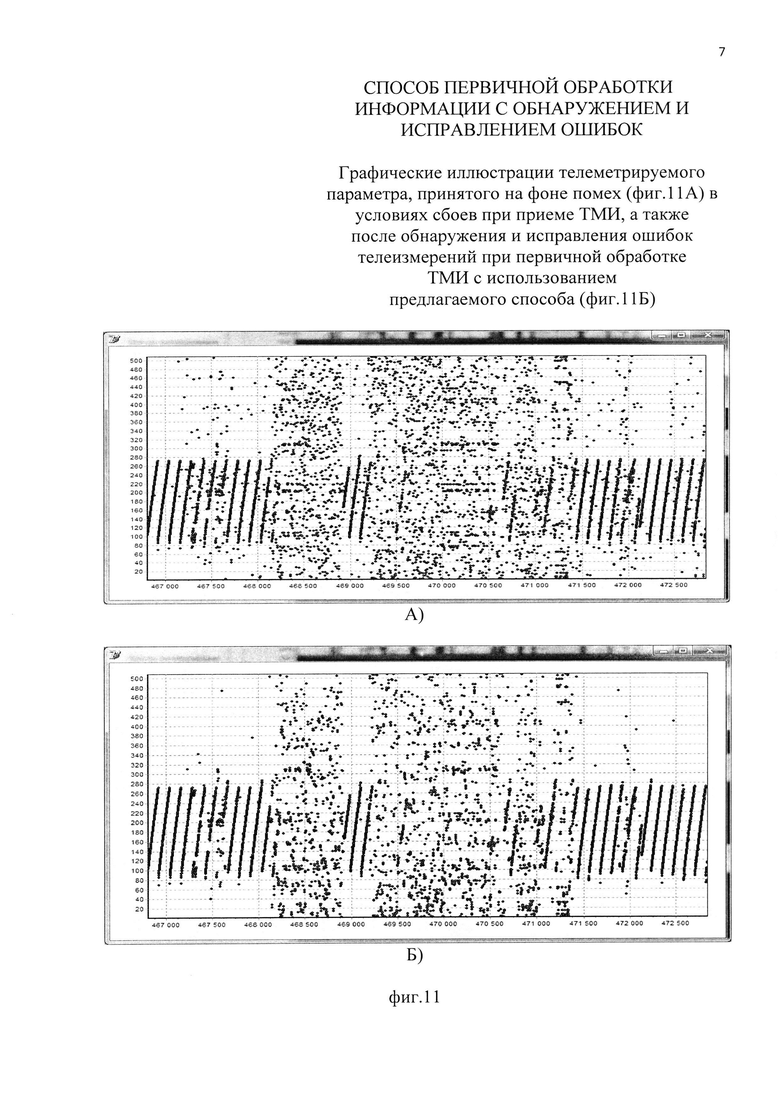
На фиг. 11А представлен график телеметрируемого параметра (ТМП), полученного в реальных условиях его приема на фоне помех. На нем видны сбои, которые сопровождают прием ТМИ. Они появляются из-за существующих сигналов синхронизации, которые не обладают требуемыми показателями помехоустойчивости. Но это проблема не столько приемной стороны, сколько бортовой радиотелеметрической системы (БРТС) ([6] «Способ синхронизации передаваемых сообщений и сигналов» (Патент RU № 2 538 281 С2, опубликован 10.01.15, бюл. №1).
На фиг. 11Б приведено графическое отображение того же ТМП, полученное после первичной обработки данных при использовании предлагаемого способа. Из него следует, что за один этап первичной обработки ТМИ с использованием предлагаемого изобретения было исправлено более половины ошибок, появившихся в результате действия помех. Еще одна из особенностей рассматриваемого ТМП заключается в том, что это данные высотометра, представленные в виде приращений, относительно исходного уровня, поэтому они имеют вид, напоминающий линейно-изменяющиеся отрезки, претерпевающие разрывы. Использование методов фильтрации для такого рода ТМП сопряжено со значительными сложностями, прежде всего, из–за малых временных промежутков между разрывами возрастающих его значений.
Из представленных иллюстраций также следует, что, если использовать повторную операцию дополнительных ПСАП и ОСАП с измененным значением минимального кодового расстояния dmin(2), то ранее не обнаруженные аномальные ошибки также будут исправлены. Но для этого процедуру дополнительного ПСАП и ОСАП необходимо повторить, но уже по отношению к тем предварительно исправленным данным ТМП, которые были получены на первом этапе первичной обработки. Этому способствует то обстоятельство, что повторные операции применения дополнительного ПСАП и ОСАП будут проводиться в режиме «отложенного времени». При этом временные затраты на проведение операций ПСАП и ОСАП на этапе обработки не ограничены режимом «реального времени», как это имеет место при передаче информации по высокоскоростных радиолиниям (ВСР). В этом случае время представляет собой тот ресурс, который может быть использован для повышения качества уже полученной информации. В результате этого основное противоречие между необходимостью повышения скорости передачи информации, с одной стороны, и обеспечением при этом требуемых высоких показателей ее достоверности в виде вероятности искажения бит (Рб), появляющееся при передаче информации с использованием ВСР, может быть разрешено за счет резерва времени, который появляется при первичной обработке данных. В результате этого, например, информацию с КА ДЗЗ, можно передать с требуемой скоростью 1,2Гбит/с, а низкие ее показатели достоверности в виде Рб = 10-2 – 10-1 повысить до значений Рб = 10-5 – 10-4.
Но если использовать повторную операцию дополнительных ПСАП и ОСАП с измененным значением минимального кодового расстояния dmin(2), то эти аномальные ошибки также будут обнаружены и исправлены. Но для этого процедуру дополнительного ПСАП и ОСАП необходимо повторить, но уже по отношению к тем предварительно исправленным данным ТМП, которые были получены на первом этапе первичной обработки. Этому способствует то обстоятельство, что повторные операции применения дополнительного ПСАП и ОСАП будут проводиться в режиме «отложенного времени» При этом временные затраты на проведение операций ПСАП и ОСАП на этапе обработки не ограничены режимом «реального времени», как это имеет место при передаче информации по высокоскоростных радиолиниям. В этом случае время представляет собой тот ресурс, который может быть использован для повышения качества уже полученной информации.
Возможность изменения значения dmin(2) при повторном применении алгоритмов ПСАП-ОСАП связана, например, с делением исходных N- разрядных слов-измерений на не равные по разрядности кодовые сегменты. Так, для рассмотренного на иллюстрациях (фиг.1 – фиг. 11) случая N = 2n = 10, выделенные кодовые сегменты были пятиразрядными (n = 5). Следовательно, при повторной операции обнаружения и исправления ошибок при ПСАП и ОСАП необходимо исходные слова-измерения поделить на другие, не равные части. Например, младший сегмент в алгоритме (1пр) <а1j*>2, который был пятиразрядным полусловом, может стать четырехразрядным, а старший сегмент в алгоритме (1пр) <а2j*>2 (то же пятиразрядный) тогда становится шестиразрядным. При дополнительном кодировании на основе перестановки их местами получим увеличение минимального кодового расстояния dmin(2) (ранее оно было равно dmin(2) = 32, а при реализации нового предложения dmin(2)/ = 64). В результате такой повторной операции при проведенном экспериментальном исследовании было исправлено 99% ошибок телеизмерений (фиг. 3Г).
Алгоритм «мягкого» декодирования предполагает выполнение следующих операций, последовательность которых представлена цифрами от 1 до 6, где
1 – нахождение абсолютных разностей между соседними закодированными значениями ТМП: δjM* = |Cj+1*-Cj*|; (6)
2 – выделение графического фрагмента ТМП, заключенного между соседними значениями абсолютных разностей δjM* ≥ 0,8 ×2N; (7)
3 - определение значений равноостаточности ξµj* для закодированных данных внутри выделенного графического фрагмента для каждого временного отсчёта j:
ξµj* ≡ Cj* (mod m3); (8)
4 – построение гистограммы распределений значений ξµj* и нахождения ее моды:
мода ξµj* = ξµjдост, (9)
где ξµjдост – значение равноостаточности, которое воспринимают как верное;
5 – выполнение операций:
1) корректировка ξµj*, предполагающая замену значений ξµj*, отличающихся от наиболее часто совпадающих значений (моды), на значение ξµjдост;
ξµj* → ξµjдост, (10)
в результате чего исправляют ошибки ε j;
2) восстановление скорректированных значений
Cj/= Сj + сj/, где сj/< сj, (11)
6 – окончание массива значений ТМП С*j, j = 1,…, s, попавших в выделенный графический фрагмент, и выдача результатов «мягкого» декодирования исправленных результатов ПСАП Cj/ для «жесткого» декодирования.
7 - жесткое декодирование, предполагающее переход от значений Cj/= Сj + сj/ к значениям Хj/= Хj + ε j/, где ε j/< ε j.
В последующем описанную процедуру обнаружения и исправления ошибок повторяют, но при дополнительном помехоустойчивом кодировании с другими значениями минимального кодового расстояния dmin(2-i) (dmin(2-i)≠ dmin(2)) и при использовании других, по отношению к уже использовавшемуся, способов безызбыточного или малоизбыточного помехоустойчивого кодирования, в том числе и составляющих основу патентов [3,4]. Ее заканчивают тогда, когда показатели достоверности восстанавливаемой при воспроизведении информации в режиме «отложенного времени» будут удовлетворять предъявляемым требованиям либо тогда, когда корректирующие возможности известных методов структурно-алгоритмических преобразований будут исчерпаны [2,3,4], после чего последнюю версию восстановленных при воспроизведении данных телеизмерений подвергают фильтрации, последующей вторичной обработке и анализу, на основе которого принимают управляющие решения.
Обработке, осуществляемой с целью обнаружения и исправления ошибок, может подвергаться не только телеметрическая, но и другая информация, обладающая внутренней избыточностью, которая появляется при представлении данных и сигналов цифровым кодом с использованием теоремы о дискретизации В.А.Котельникова.
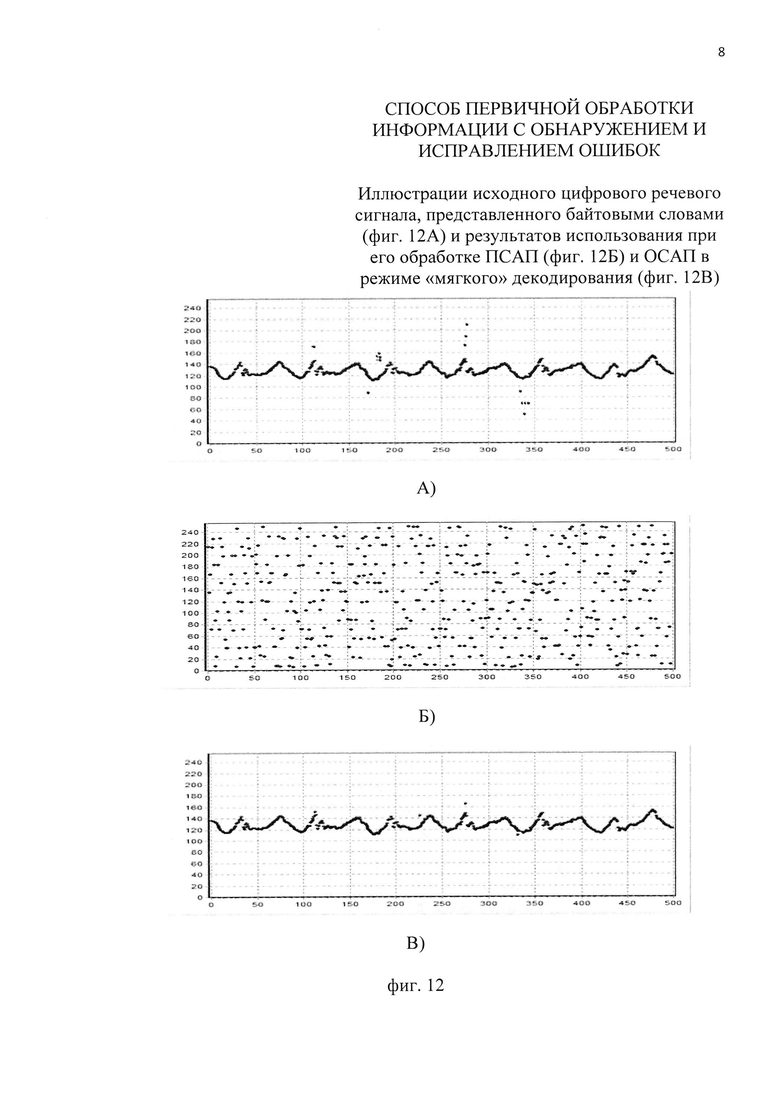
На фиг. 12 представлено графическое представление цифрового речевого сигнала, искаженного при передаче (фиг. 12А), а также результатов его прямых структурно-алгоритмических преобразований (ПСАП), использованных при обработке информации (фиг. 12Б) и обратных структурно-алгоритмических преобразований (ОСАП) в режиме «мягкого» декодирования с обнаружением и исправлением ошибок (фиг. 12В). Из 14 ошибок принятого цифрового речевого сигнала исправлено 11 при использовании только одного этапа первичной его обработки.
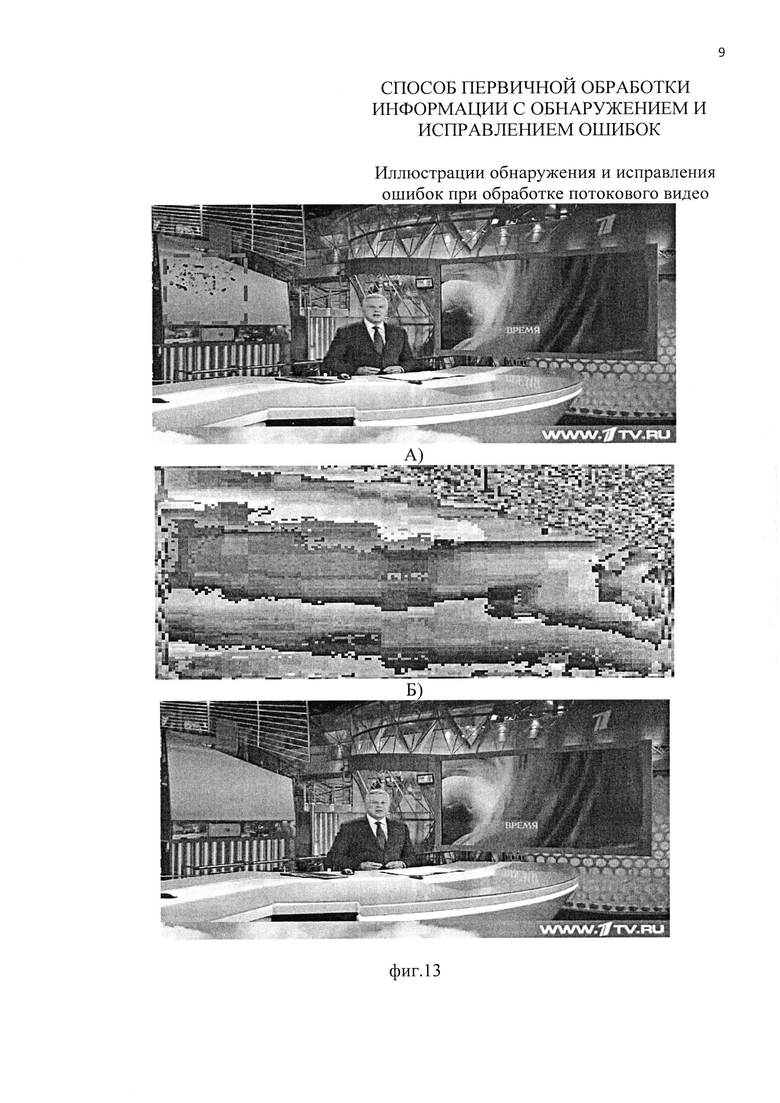
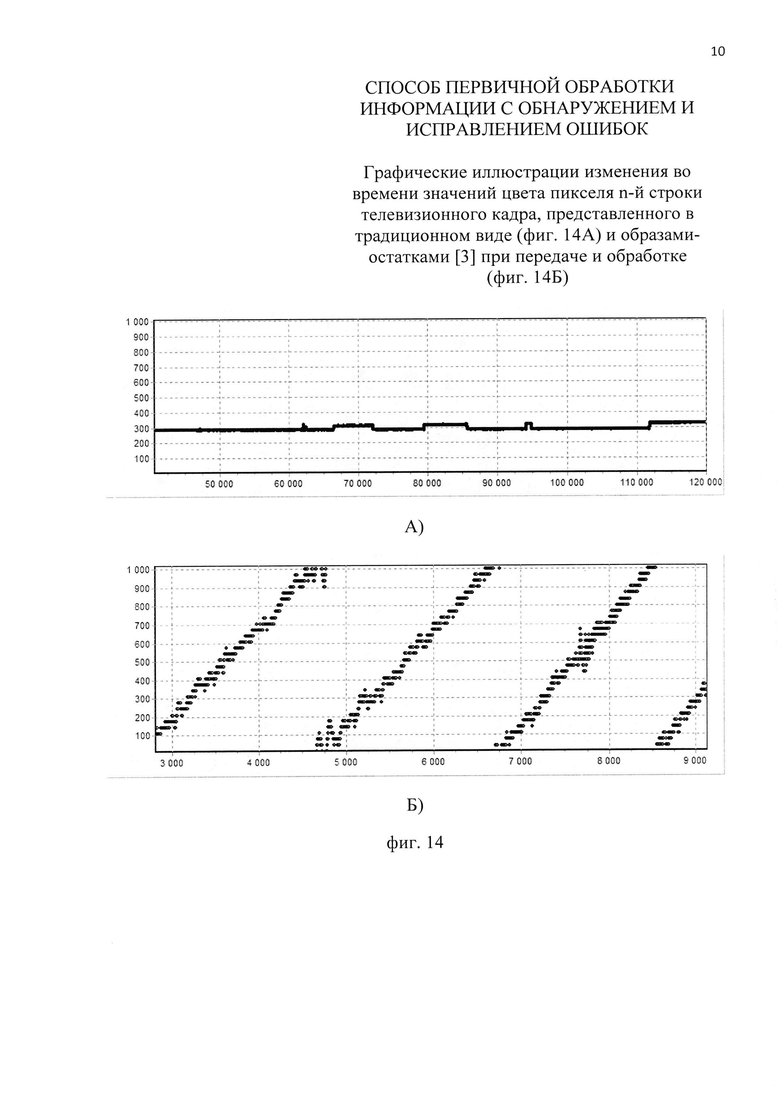
На фиг. 13 приведены результаты первичной обработки цифрового телевизионного сигнала. На исходном изображении (фиг. 13А) видны ошибки приема, выделенные пунктирным квадратом. На фиг. 13Б представлены результаты его прямых структурно-алгоритмических преобразований (ПСАП), использованных при обработке информации. На фиг. 13В представлены результаты его обратных структурно-алгоритмических преобразований (ОСАП), осуществляющих коррекцию ошибок в режиме «мягкого» декодирования. Иллюстрации, приведенные на фиг. 14, служат для пояснения сути ПСАП, реализующего способ [2] дополнительного помехоустойчивого кодирования, основу которого составляет представление исходных 10-тиразрядных слов (N = 10) пятиразрядными образами-остатками в соответствии с алгоритмом патента [3]. В итоге исходное и маловыразительное представление значений цвета пикселем n-ной строки телевизионного кадра (фиг. 14А) будет заменено на результаты его ПСАП в виде безыбыточного помехоустойчивого кодирования с числом разрешенных позиций М = 31 и минимальным кодовым расстоянием dmin(2) = 33. В результате этого более эффективно будет использованы выделенная разрядная сетка для представления значений цветности 10-тиразрядным двоичным кодом (Шд = (0 – (2N - 1)) = (0 – 1023). При этом из увеличенного в 33 раза dmin(2) появляется возможность обнаружения и исправления ошибок и искажений, присутствующих на первоначальном изображении.
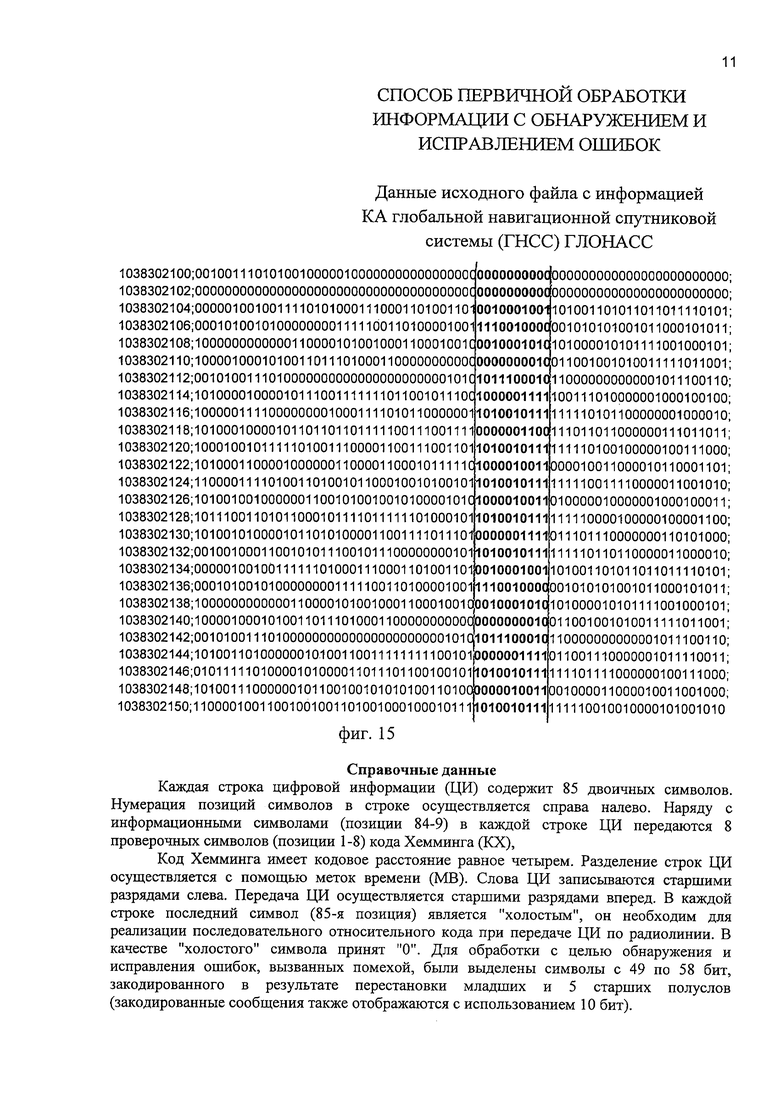
На фиг. 15 приведены данные представления строк цифровой информации (ЦИ) КА глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС. Каждая строка цифровой информации (ЦИ) содержит 85 двоичных символов. Нумерация позиций символов в строке осуществляется справа налево. Наряду с информационными символами (позиции 84-9) в каждой строке ЦИ передаются 8 проверочных символов (позиции 1-8) кода Хемминга (КХ). Код Хемминга имеет кодовое расстояние равное четырем, что позволяет обнаруживать и исправлять две битовые ошибки в строке ЦИ. Разделение строк ЦИ осуществляется с помощью меток времени (МВ). Слова ЦИ записываются старшими разрядами слева. Передача ЦИ осуществляется старшими разрядами вперед. В каждой строке последний символ (85-я позиция) является «холостым», он необходим для реализации последовательного относительного кода при передаче ЦИ по радиолинии. В качестве «холостого» символа принят «0». Для обработки с целью обнаружения и исправления ошибок, вызванных помехой, были выделены в каждой из строк ЦИ символы с 58 по 49 бит. В качестве ПСАП (дополнительного помехоустойчивого кодирования) использован алгоритм патента [2], заключающегося в выделении и перестановки 5-тиразрядных младших и 5-тиразрядных старших полуслов.
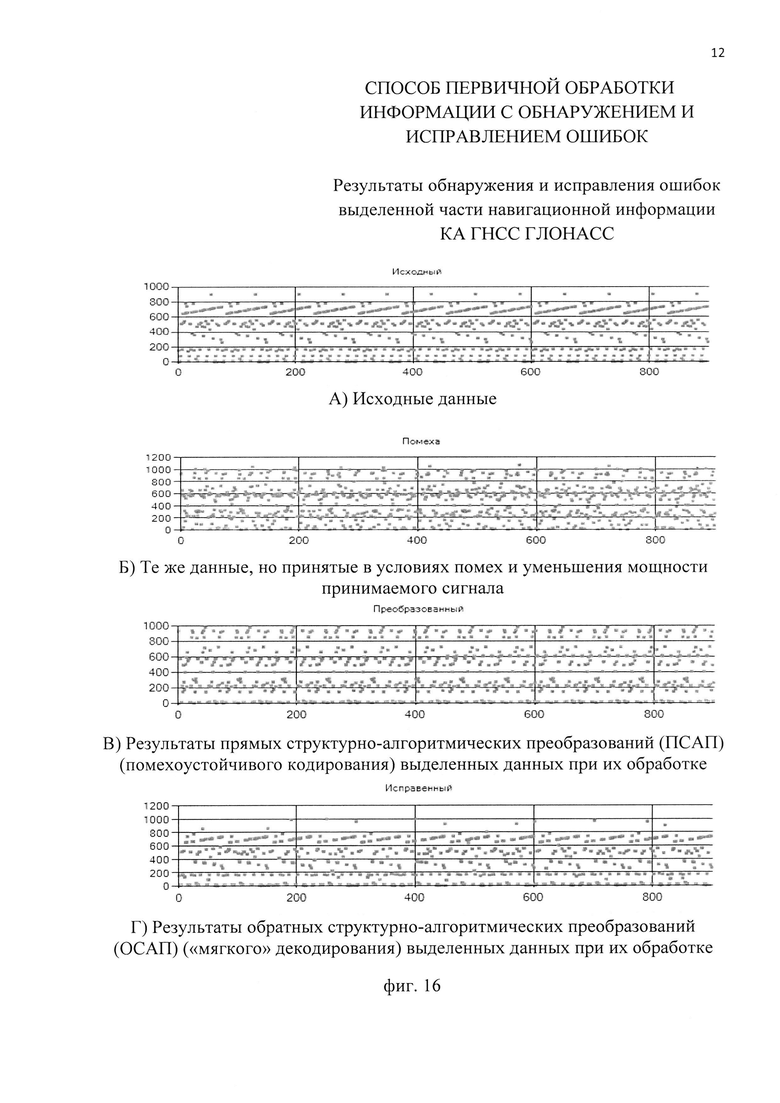
На фиг. 16 представлены результаты обнаружения и исправления ошибок, которые были в принятых данных. При этом на фиг. 16А представлены исходные данные, содержащиеся в битах с 58 по 49, выделенных из строк ЦИ. На фиг. 16Б представлены те же данные, но принятые в условиях помех при уменьшении мощности принимаемого сигнала до его граничного значения, ниже которого связи нет. На фиг. 16В представлены результаты прямых структурно-алгоритмических преобразований (ПСАП) (дополнительного помехоустойчивого кодирования) выделенных данных на этапе их обработки. На фиг. 16Г приведены результаты обратных структурно-алгоритмических преобразований (ОСАП) («мягкого» декодирования) выделенных данных на этапе их обработке. В результате выполненной предварительной обработки было исправлено 53% ошибок. Эффект мог бы быть и большим, если бы биты, которые подлежат обработке с целью обнаружения и исправления ошибок, были бы выбраны не волюнтаристски, а на осмысленно, например, на основе исходных данных о той информации, которую они в себе несут или же на основе анализа результатов «жесткого» декодирования принятых цифровых сигналов. Так, например, в воспроизводимых исходных данных, содержащихся с 58 по 49 битах, выделенных из строк ЦИ, есть сообщения в виде регулярно следующих выбросов, имеющих большие отклонения от других по амплитуде, из-за чего основное требование, заключающееся в корреляционной зависимости соседних значений, не всегда выполняется.
Данный пример показателен еще и тем, что предлагаемые способы ПСАП и ОСАП, используемые, в том числе и в патентах [2,3,4], не исключают возможность использования других, получивших широкое распространение в существующей практике передачи и обработки информации. Например, способов традиционного помехоустойчивого кодирования с использованием кодов Хэмминга, а также различных способов фильтрации данных, искаженных помехами.
Таким образом, предлагается способ первичной обработки информации с обнаружением и исправлением ошибок передачи заключающийся в том, что принятые и зарегистрированные данные, искаженные помехой различного происхождения, подвергают предварительной обработке для повышения показателей их достоверности, отличающийся тем, что при воспроизведении информации выделяют кодовые конструкции слов или сообщений <Хj*>2 = <Хj>2 + <ε j>2, где <>2 – символ представления данных двоичным кодом с известным числом разрядов N, повторяющие переданные исходные слова или сообщения <Хj>2, но отличающиеся от них неизвестными ошибками <ε j>2 , вызванными инверсиями символов двоичного кода под действием помехи, разделяют их на составные части или кодовые сегменты <<а2j*>2,<а1j*>2 >2, где надстрочный знак (*) указывает на возможное присутствие ошибок, с числом разрядов двоичного кода, равным 


формируют графические фрагменты выделенных данных, границы которых определяют соседние максимальные абсолютные разности δjМ* = |Cj* – C(j+1)*| ≥ (0,8 - 1)Ш и δ(j+s)М*= |C(j+s)* – C(j+s)+1* | ≥ (0,8 - 1)Ш, внутри выделенных таким образом графических фрагментов данных результат кодирования Cj*, представленный в двоичном <>2 или десятичном исчислении <>10, после деления на соответствующее новое значение минимального кодового расстояния dmin(2) представляет собой остаток от деления ξk, который используют в качестве инварианта, принимающего одно и тоже значение при отсутствии ошибок, вызванных помехой и, если он отличается от ξμ, представляющего собой в общем случае моду распределения плотности распределения вероятностей ξi, то неравенство (ξk ≠ ξμ) идентифицируют как факт обнаружения ошибки, вызванной помехой, которую исправляют путем замены отличающегося значения остатка ξk на значение ξμ, которое является наиболее повторяющимся в выделенном графическом фрагменте данных, восстановленные значения остатков-инвариантов ξμ используют для повышения показателей достоверности полученной информации, а восстановленные значения остатков-инвариантов ξμ в качестве технических эталонов для осуществления непрерывного процесса метрологической аттестации радиотехнических систем измерений, в результате чего реализуют расширенные возможности, используемые для очищения принятых данных от помех, контроля достоверности полученных результатов измерений и информационной поддержки принятия решений.
Для обеспечения возможности дополнительного контроля достоверности принятой и обработанной информации, а также для выделения из потоков принятых данных временных интервалов, для которых выполняется условие корреляционной зависимости соседних значений слов и сообщений Хj-s*, , Хj-1*, Хj*, Хj+1*, , Хj+s*, используют результаты «жесткого» декодирования, для чего введен дополнительный пункт формулы изобретения.
2. Способ по п. 1, отличающийся тем, что по отношению к воспроизводимой информации производят «жесткое» декодирование преобразованных в результате выполненных структурно-алгоритмических преобразований новых слов или сообщений <Cj*>2 = < <а1j*>2,<а2j*>2 >2 = <Сj>2 + <сj>2, путем выделения из них составных частей или кодовых сегментов <а2j*>2,<а1j*>2 , которые внутри выделенных слов или сообщений переставляют местами с образованием в результате выполненных обратных структурно-алгоритмических преобразований первоначальной позиционной структуры кодирования слов или сообщений <Хj*>2 =
= < <а2j*>2,<а1j*>2 >2 = <Хj>2 + <ε j>2 без обнаружения и исправления ошибок <ε j>2, полученные при этом результаты анализа корреляционной зависимости соседних восстановленных значений Хj-s*, , Хj-1*, Хj*, Хj+1*, , Хj+s*, используют для определения последовательности данных в воспроизводимом потоке информации, обладающих локальными свойствами внутренней избыточности, проявляющейся в наличии корреляционной зависимости между соседними значениями телеметрируемого параметра, данных строк цифровой информации или других ее структурно-кодовых образований Хj-s*, , Хj-1*, Хj*, Хj+1*, , Хj+s*, а также для установления временных интервалов с обозначением структур представления данных, в том числе и номеров бит в строках цифровой информации и других ее структурно-кодовых образований, для которых свойства внутренней избыточности информации выполняются, на выделенных при этом временных интервалах, характеризующих наличие внутренней избыточности информации, в том числе и локально проявляющейся, используют алгоритм «мягкого» декодирования для обнаружения и исправления ошибок.
Воспроизводимую информацию на выделенных временных интервалах с учетом номеров бит структур представления данных, обладающих первоначальными свойствами корреляционной зависимости и их повторяемости, используют для обнаружения и исправления ошибок на основе универсального алгоритма «мягкого» декодирования, что нашло отражение в 3 пункте формулы изобретения.
3. Способ по пп. 1 и 2, отличающийся тем, что при реализации алгоритма «мягкого» декодирования, предназначенного для обнаружения и исправления ошибок принятой и зарегистрированной информации, находят разрывы, определяющие границы графических фрагментов телеметрируемых параметров, строк цифровой информации или других ее структурно-кодовых образований, преобразованных при воспроизведении информации с использованием алгоритмов прямых структурно-алгоритмических преобразований данных телеизмерений, строк цифровой информации или других ее структурно-кодовых образований на основе перестановки составных частей исходных N – разрядных кодовых конструкций данных телеизмерений, строк цифровой информации или других ее структурно-кодовых образований, полученных в результате воспроизведения телеметрической или другой информации, обладающей внутренней избыточностью и представляющих собой значения выборок контролируемых процессов и передаваемых данных, получаемых при их представлении двоичными кодами N-ной разрядности, затем, используя признаки идентификации разрывов значений передаваемых данных при выходе их за пределы значений, которые представляют в виде разностей первого порядка между последующими и предшествующими значениями преобразованного телеметрируемого параметра, значений данных строк цифровой информации или других ее структурно-кодовых образований, восстанавливаемых при воспроизведении информации, определяют те их абсолютные значения, которые попадают в интервал (0,8 – 1) m2, где m2 – выбранный второй модуль сравнения, равный 2N, где N – число разрядов двоичного кода, используемого для представления значений слов или других сообщений, восстановленные с использованием алгоритмов перестановки составных частей воспроизводимых слов или других сообщений, принадлежность которых к выделенным графическим фрагментам значений телеметрируемого параметра, данных строк цифровой информации или других ее структурно-кодовых образований подтверждена на основе используемых при воспроизведении признаков достоверности восстановления структуры данных восстановленной информации и результатов «жесткого» декодирования преобразованной информации, подвергают делению на первый модуль сравнения m1, равный 2i, где i – число разрядов кодовой конструкции составной части или кодового сегмента восстановленного слова или другого сообщения, называемых младшими в соответствии с принятой позиционной структурой его восстановления, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде группового значения «равноостаточности», выбирают в сформированной статистической выборке, состоящей из остатков, наиболее часто встречающееся значение, при этом все другие значения остатков, не совпадающие со значением найденного инварианта, являющегося техническим эталоном переданной информации, используют для обнаружения ошибок передачи результатов телеизмерений, значений строк цифровой информации или других ее структурно-кодовых образований, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на второй модуль сравнения m2 дают значение остатка, равное инварианту, найденному для выделенного графического фрагмента, после обнаружения и исправления ошибок при воспроизведении преобразованной информации реализуют второй этап «жесткого» декодирования преобразованных данных телеизмерений, строк цифровой информации или других ее структурно-кодовых образований путем обратной перестановки местами ранее выделенных из слов или других сообщений их первоначальных составных частей и кодовых сегментов, в результате которой старшие и младшие составные части и кодовые сегменты снова занимают свое первоначальное позиционное положение, восстановленные при воспроизведении данные телеизмерений, значений строк цифровой информации или других ее структурно-кодовых образований с обнаруженными и исправленными ошибками регистрируют, в последующем при необходимости описанную процедуру обнаружения и исправления ошибок повторяют, но при дополнительном помехоустойчивом прямом структурно-алгоритмическом преобразовании или безызбыточном помехоустойчивом кодировании с другими значениями минимального кодового расстояния dmin(2-i) (dmin(2-i)≠ dmin(2)), где i – надстрочный индекс повторения операций предварительной обработки, и заканчивают тогда, когда показатели достоверности восстанавливаемой при воспроизведении информации в режиме «отложенного времени» будут удовлетворять предъявляемым требованиям, либо тогда, когда корректирующие возможности известных способов структурно-алгоритмических преобразований будут исчерпаны, после чего последнюю версию восстановленных при воспроизведении данных используют в качестве обновленной копии информации с уменьшенным числом ошибок или подвергают фильтрации, последующей вторичной обработке и анализу, на основе которого принимают управляющие решения.
Таким образом, сущностные характеристики предлагаемого способа заключаются в следующем.
Появляется возможность дополнительного очищения уже принятой и зарегистрированной информации, обладающей свойствами внутренней избыточности, от помех и искажений на основе алгоритмов структурно-алгоритмических преобразований (САП), Определены условия обеспечения взаимной однозначной прямых САП (ПСАП), отвечающих, условно говоря, за дополнительное помехоустойчивое кодирование, и обратных САП (ОСАП), обеспечивающих реализацию декодирования информации. Отличительная особенность предлагаемых процедур ПСАП и ОСАП от используемых в патентах [2,3,4] заключается в том, что их используют уже после приема и регистрации информации на этапе первичной ее обработки, когда отсутствуют жесткие ограничения, предъявляемые к оперативности реализации процедур ПСАП и ОСАП. Кроме того, алгоритмы, составляющие основу патентов [2,3,4], были ориентированы на телеметрическую информацию. Однако последующие исследования, в том числе и экспериментальные, показали, необходимость их адаптации и к другой информации. Такая потребность стала особо актуальной в связи с новыми требованиями по повышению объемов и скоростей передаваемой информации.
В настоящее время многими заказчиками предъявляются требования к перспективным системам передачи данных, которые не могут быть выполнены из-за ограничений, устанавливаемых физическими законами передачи информации. Например, при передаче информации с КА дистанционного зондирования земли (ДЗЗ) требуется обеспечить скорость передачи данных 1,2Гбит/с и достоверность приема в виде вероятности искажения бит Рб ≤ 10-8. На самом деле такая скорость передачи данных может быть обеспечена, но достоверность ее приема информации оценивают такими показателями, как Рб = 10-2 – 10-1. В соответствии с теорией при Рб = 0,5 связи нет. Поэтому скорость передачи информации можно повышать и далее, но фактически связи при этом не будет. Один из наиболее эффективных путей преодоления этого противоречия заключается в использовании фактора времени в качестве одного из резервов, которые можно использовать его разрешения. Такая возможность появляется при обработке.
Требования к скорости передачи растут, прежде всего, из-за того, что объемы снимков, произведенных КА ДЗЗ, определяются терабайтами, а время для их передачи ограничено 5 – 7 минутами нахождения спутника в зоне приема информации. Поэтому ее запоминают на борту КА и сбрасывают в зонах радиовидимости частями. При этом жесткое космическое излучение выполняет свое «черное» дело: при каждой последующей передаче показатели достоверности информации в виде Рб становятся все хуже без учета тех ошибок, которые в нее привнесет еще и радиоканал. И это проблема международная. Для уменьшения ошибок в блоках запоминания информации на борту КА ДЗЗ используют различные способы борьбы с ошибками, вызванными жестким космическим излучением, например, блоки памяти троируют и используют мажоритарное голосование при воспроизведении ранее записанных данных. В результате объемы бортовой аппаратуры и ее энергопотребление растут. При этом не используются возможности предлагаемого представления данных образами-остатками, представляющих собой независимые информационные элементы меньшей по отношению к первоначальным структурно-кодовым образованиям количеством разрядов, для уменьшения объемов бортовой памяти.
Также полезно не используется появляющийся между сбросами информации КА ДЗЗ резерв времени, который можно использовать для очищения от помех информации, хранящейся в блоках памяти, а также предлагаемый способ [3] представления данных в системе остаточных классов (СОК). Затем при передаче информации по радиоканалу снова используют ПСАП и ОСАП, предлагаемые в патентах [2,3,4]. Наконец, после приема информации снова появляется резерв времени, который при использовании предлагаемого изобретения может быть использован для повышения показателей достоверности информации при многократной процедуре ее очищения от помех.
Таким образом, появляется целая технологическая цепочка структурно-алгоритмических преобразований, которая распределена по различным информационным сечениям, включающая в себя, хранение, передачу прием и обработку данных с обнаружением и исправлением ошибок на каждом из этапов получения информации КА ДЗЗ.
В итоге, такой низкий показатель достоверности приема информации, полученный при скоростях передачи, определяемых Гбит/с, на физической уровне, как, например, Рб = 10-2 – 10-1, может быть заменен на эквивалентный (или кажущийся) показатель (Рбэ= 10-5 – 10-4) после предлагаемых в изобретении операций обработки информации КА ДЗЗ.
Многие считают, что он может быть и равным Рб = 10-6, однако при этом не учитываются реальные модели помех в радиоканалах, уровень которых имеет устойчивую тенденцию к повышению. Прежде всего, это связано со все более сложной электромагнитной обстановкой и электромагнитной совместимостью различных средств передачи информации.
Проведенные экспериментальные исследования показывают, что в результате использования изобретения существующий низкий показатель достоверности приема информации, полученный на физической уровне, может быть повышен на несколько порядков при переходе к его эквивалентному значению. Основой для такого прорыва служит новый эффект, связанный с появлением технического эталона в виде групповых свойств «равноостаточности», имеющего высокую частоту проявления, сравнимую, в ряде, случаев, например, при передаче ТМИ с частотой смены передаваемых данных.
Его научно-методическую базу составляет конструктивная теория конечных полей, отличающаяся от классической теории конечных полей Э.Галуа, расширенной возможностью ее приспособления к решению прикладных задач в области современной информатики.
В настоящее время самая большая работа по экспериментальному исследованию эффективности предлагаемых способов выполнена по отношению к телеметрической информации, получаемой в реальных условиях летных испытаний различных ЛА. Также показан существенный положительный эффект при использовании предлагаемого способа обработки других видов информации.
Литература
1. Кукушкин С.С. Теория конечных полей и информатика. Т.1. Методы и алгоритмы, классические и нетрадиционные, основанные на использовании конструктивной теоремы об остатках, М: Минобороны России, 2003. – 284с.
2. Способ передачи информации, патент №2609747, приоритет от 13.08.2017 г.
3. Способ передачи информации и система для его осуществления», патент RU №2586605, приоритет от 22.03.2013 г.
4. Способ передачи информации и система для его осуществления», патент RU №2586833, приоритет 15.08.2015 г.
5. Зюко А.Г. Помехоустойчивость и эффективность систем связи. - М.: Связь, 1972. – 360 с.
6. Способ синхронизации передаваемых сообщений и сигналов, патент RU № 2 538 281 С2, опубликован 10.01.15, бюл. №1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКОНОМНОГО ПРЕДСТАВЛЕНИЯ И ПЕРЕДАЧИ БИПОЛЯРНЫХ ДАННЫХ И СИГНАЛОВ | 2017 |
|
RU2649291C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2739335C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ ДАННЫХ ИЗМЕРЕНИЙ | 2017 |
|
RU2672392C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ КОРОТКОВОЛНОВОЙ СВЯЗИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2796154C1 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ С МНОГОПАРАМЕТРИЧЕСКОЙ АДАПТАЦИЕЙ К СОСТОЯНИЮ КАНАЛА СВЯЗИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2795047C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2017 |
|
RU2674809C9 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2022 |
|
RU2801462C1 |
Изобретение относится к системам обработки информации, обладающей внутренней избыточностью и искаженной помехами. Техническим результатом является возможность обнаружения и исправления ошибок передачи информации за счет ее внутренней избыточности, связанной с наличием корреляционной зависимости между соседними значениями цифровой информации; обеспечение дополнительного контроля достоверности принятых и восстановленных сообщений. Основу достижения технического результата составляет выделение кодовых конструкций сообщений <Хj*>2 = <Хj>2 + <εj>2, где <>2 – символ представления данных двоичным кодом с известным числом разрядов N, а <εj>2 – ошибки, вызванные инверсиями символов двоичного кода под действием помехи, разделяют их на составные части или кодовые сегменты <<а2j*>2,<а1j*>2 >2, где надстрочный знак (*) указывает на возможное присутствие ошибок, которые при приеме или при обработке рассматривают как единую N - разрядную двоичную позиционную кодовую конструкцию, выделенные составные части или кодовые сегменты <а2j*>2,<а1j*>2 переставляют местами с образованием в результате выполненных структурно-алгоритмических преобразований новых слов или сообщений <Cj*>2=< <а1j*>2,<а2j*>2 >2 = <Сj>2 + <сj>2, отличающихся по отношению к первоначальному числу dmin(1) минимального кодового расстояния новым значением dmin(2) минимального кодового расстояния dmin(2)= dmin(1) × 2i, увеличенным в 2i раз, где i представляет собой число разрядов младшего по старшинству сегмента <а1j*>2, после деления результата кодирования <Cj*>2 на новое значение минимального кодового расстояния dmin(2) получают остаток от деления ξμ, который используют в качестве инварианта, значение ξk (ξk≠ ξμ) идентифицируют как факт обнаружения ошибки, вызванной помехой, которую исправляют путем замены отличающегося значения остатка ξk на значение ξμ, которое является наиболее повторяющимся в выделенном графическом фрагменте данных, заключенном между соседними значениями результатов дополнительного кодирования, при которых выполняется неравенство |Cj* – Cj+1*| > (0,8 – 1) m2, где m2 – выбранный второй модуль сравнения, равный 2N, а N – число разрядов двоичного кода, используемого для представления значений слов или сообщений. 2 з.п. ф-лы, 16 ил.
1. Способ первичной обработки информации с обнаружением и исправлением ошибок передачи, заключающийся в том, что принятые и зарегистрированные данные, искаженные помехой различного происхождения, подвергают предварительной обработке для повышения показателей ее достоверности, отличающийся тем, что при воспроизведении информации выделяют кодовые конструкции слов или сообщений  , где
, где  - символ представления данных двоичным кодом с известным числом разрядов N, повторяющие переданные исходные слова или сообщения
- символ представления данных двоичным кодом с известным числом разрядов N, повторяющие переданные исходные слова или сообщения  , но отличающиеся от них неизвестными ошибками
, но отличающиеся от них неизвестными ошибками  , вызванными инверсиями символов двоичного кода под действием помехи, разделяют их на составные части или кодовые сегменты
, вызванными инверсиями символов двоичного кода под действием помехи, разделяют их на составные части или кодовые сегменты  ,
,  , где надстрочный знак (*) указывает на возможное присутствие ошибок, с числом разрядов двоичного кода, равным
, где надстрочный знак (*) указывает на возможное присутствие ошибок, с числом разрядов двоичного кода, равным  при четном числе N, или
при четном числе N, или  и
и  при нечетном числе N, которые при приеме или при обработке рассматривают как единую N-разрядную двоичную позиционную кодовую конструкцию, о чем свидетельствует повторное обрамление составных частей или кодовых сегментов символом
при нечетном числе N, которые при приеме или при обработке рассматривают как единую N-разрядную двоичную позиционную кодовую конструкцию, о чем свидетельствует повторное обрамление составных частей или кодовых сегментов символом  , затем выделенные составные части или кодовые сегменты
, затем выделенные составные части или кодовые сегменты  ,
,  переставляют местами с образованием в результате выполненных структурно-алгоритмических преобразований новых слов или сообщений
переставляют местами с образованием в результате выполненных структурно-алгоритмических преобразований новых слов или сообщений  ,
,  , отличающихся по отношению к первоначальному числу
, отличающихся по отношению к первоначальному числу  минимального кодового расстояния новым значением
минимального кодового расстояния новым значением  минимального кодового расстояния
минимального кодового расстояния  , увеличенным в 2i раз, где i представляет собой число разрядов младшего по старшинству сегмента , из-за чего при заданной шкале представления полученных слов или сообщений, равной Ш=(0-(2N-1)), формируют графические фрагменты выделенных данных, границы которых определяют соседние максимальные абсолютные разности
, увеличенным в 2i раз, где i представляет собой число разрядов младшего по старшинству сегмента , из-за чего при заданной шкале представления полученных слов или сообщений, равной Ш=(0-(2N-1)), формируют графические фрагменты выделенных данных, границы которых определяют соседние максимальные абсолютные разности  и
и  , внутри выделенных таким образом графических фрагментов данных результат кодирования
, внутри выделенных таким образом графических фрагментов данных результат кодирования  , представленный в двоичном
, представленный в двоичном  или десятичном исчислении
или десятичном исчислении  , после деления на соответствующее новое значение минимального кодового расстояния
, после деления на соответствующее новое значение минимального кодового расстояния  представляет собой остаток от деления ξk, который используют в качестве инварианта, принимающего одно и тоже значение при отсутствии ошибок, вызванных помехой, и если он отличается от ξμ, представляющего собой в общем случае моду распределения плотности распределения вероятностей ξi, то неравенство (ξk≠ξμ) идентифицируют как факт обнаружения ошибки, вызванной помехой, которую исправляют путем замены отличающегося значения остатка ξk на значение ξμ, которое является наиболее повторяющимся в выделенном графическом фрагменте данных, восстановленные значения остатков-инвариантов ξμ используют для повышения показателей достоверности полученной информации в качестве технических эталонов для осуществления непрерывного процесса метрологической аттестации радиотехнических систем измерений и передачи данных, в результате чего реализуют расширенные возможности, используемые для очищения принятых данных от помех, контроля достоверности полученных результатов измерений и информационной поддержки принятия решений.
представляет собой остаток от деления ξk, который используют в качестве инварианта, принимающего одно и тоже значение при отсутствии ошибок, вызванных помехой, и если он отличается от ξμ, представляющего собой в общем случае моду распределения плотности распределения вероятностей ξi, то неравенство (ξk≠ξμ) идентифицируют как факт обнаружения ошибки, вызванной помехой, которую исправляют путем замены отличающегося значения остатка ξk на значение ξμ, которое является наиболее повторяющимся в выделенном графическом фрагменте данных, восстановленные значения остатков-инвариантов ξμ используют для повышения показателей достоверности полученной информации в качестве технических эталонов для осуществления непрерывного процесса метрологической аттестации радиотехнических систем измерений и передачи данных, в результате чего реализуют расширенные возможности, используемые для очищения принятых данных от помех, контроля достоверности полученных результатов измерений и информационной поддержки принятия решений.
2. Способ по п. 1, отличающийся тем, что по отношению к воспроизводимой информации производят «жесткое» декодирование преобразованных в результате выполненных структурно-алгоритмических преобразований новых слов или сообщений  ,
,  путем выделения из них составных частей или кодовых сегментов
путем выделения из них составных частей или кодовых сегментов  ,
,  , которые внутри выделенных слов или сообщений переставляют местами с образованием в результате выполненных обратных структурно-алгоритмических преобразований первоначальной позиционной структуры кодирования слов или сообщений
, которые внутри выделенных слов или сообщений переставляют местами с образованием в результате выполненных обратных структурно-алгоритмических преобразований первоначальной позиционной структуры кодирования слов или сообщений  ,
,  без обнаружения и исправления ошибок
без обнаружения и исправления ошибок  , полученные при этом результаты анализа корреляционной зависимости соседних восстановленных значений
, полученные при этом результаты анализа корреляционной зависимости соседних восстановленных значений  , …,
, …,  ,
,  ,
,  , …,
, …,  используют для определения последовательности данных в воспроизводимом потоке информации, обладающих локальными свойствами внутренней избыточности, проявляющейся в наличии корреляционной зависимости между соседними значениями телеметрируемого параметра, данных строк цифровой информации
используют для определения последовательности данных в воспроизводимом потоке информации, обладающих локальными свойствами внутренней избыточности, проявляющейся в наличии корреляционной зависимости между соседними значениями телеметрируемого параметра, данных строк цифровой информации  , …,
, …,  ,
,  ,
,  , …,
, …,  , а также для установления временных интервалов с обозначением структур представления данных, в том числе и номеров бит в строках цифровой информации, для которых свойства внутренней избыточности информации выполняются, на выделенных при этом временных интервалах, характеризующих наличие внутренней избыточности информации, в том числе и локально проявляющейся, используют алгоритм «мягкого» декодирования для обнаружения и исправления ошибок.
, а также для установления временных интервалов с обозначением структур представления данных, в том числе и номеров бит в строках цифровой информации, для которых свойства внутренней избыточности информации выполняются, на выделенных при этом временных интервалах, характеризующих наличие внутренней избыточности информации, в том числе и локально проявляющейся, используют алгоритм «мягкого» декодирования для обнаружения и исправления ошибок.
3. Способ по п. 2, отличающийся тем, что при реализации алгоритма «мягкого» декодирования, предназначенного для обнаружения и исправления ошибок принятой и зарегистрированной информации, находят разрывы, определяющие границы графических фрагментов телеметрируемых параметров, строк цифровой информации, преобразованных при воспроизведении информации с использованием алгоритмов прямых структурно-алгоритмических преобразований данных телеизмерений, значений строк цифровой информации на основе перестановки составных частей исходных N-разрядных кодовых конструкций данных телеизмерений, значений строк цифровой информации, полученных в результате воспроизведения телеметрической или другой информации, обладающей внутренней избыточностью, и представляющих собой значения выборок контролируемых процессов и передаваемых данных, получаемых при их представлении двоичными кодами N-ной разрядности, затем, используя признаки идентификации разрывов значений передаваемых данных при выходе их за пределы значений, которые представляют в виде разностей первого порядка между последующими и предшествующими значениями преобразованного телеметрируемого параметра, значениями данных строк цифровой информации, восстанавливаемых при воспроизведении информации, определяют те их абсолютные значения, которые попадают во временной интервал, заключенный между соседними значениями результатов дополнительного кодирования, при которых выполняется неравенство  , где m2 - выбранный второй модуль сравнения, равный 2N, а N - число разрядов двоичного кода, используемого для представления значений слов или других сообщений, восстановленные с использованием алгоритмов перестановки составных частей воспроизводимых слов или других сообщений, принадлежность которых к выделенным графическим фрагментам значений телеметрируемого параметра, значений данных строк цифровой информации подтверждена на основе используемых при воспроизведении признаков достоверности восстановления структуры данных восстановленной информации и результатов «жесткого» декодирования преобразованной информации, подвергают делению на первый модуль сравнения m1, равный 2i, где i - число разрядов кодовой конструкции составной части или кодового сегмента восстановленного слова или другого сообщения, называемых младшими в соответствии с принятой позиционной структурой его восстановления, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде группового значения «равноостаточности», выбирают в сформированной статистической выборке, состоящей из остатков, наиболее часто встречающееся значение, при этом все другие значения остатков, не совпадающие со значением найденного инварианта, являющегося техническим эталоном переданной информации, используют для обнаружения ошибок передачи результатов телеизмерений, значений строк цифровой информации, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на второй модуль сравнения m2 дают значение остатка, равное инварианту, найденному для выделенного графического фрагмента, после обнаружения и исправления ошибок при воспроизведении преобразованной информации реализуют второй этап «жесткого» декодирования преобразованных данных телеизмерений, значений строк цифровой информации путем обратной перестановки местами ранее выделенных из слов или других сообщений их первоначальных составных частей и кодовых сегментов, в результате которой старшие и младшие составные части и кодовые сегменты снова занимают свое первоначальное позиционное положение, восстановленные при воспроизведении данные телеизмерений, значения строк цифровой информации с обнаруженными и исправленными ошибками регистрируют, в последующем при необходимости описанную процедуру обнаружения и исправления ошибок повторяют, но при дополнительном помехоустойчивом прямом структурно-алгоритмическом преобразовании или безызбыточном помехоустойчивом кодировании с другими значениями минимального кодового расстояния
, где m2 - выбранный второй модуль сравнения, равный 2N, а N - число разрядов двоичного кода, используемого для представления значений слов или других сообщений, восстановленные с использованием алгоритмов перестановки составных частей воспроизводимых слов или других сообщений, принадлежность которых к выделенным графическим фрагментам значений телеметрируемого параметра, значений данных строк цифровой информации подтверждена на основе используемых при воспроизведении признаков достоверности восстановления структуры данных восстановленной информации и результатов «жесткого» декодирования преобразованной информации, подвергают делению на первый модуль сравнения m1, равный 2i, где i - число разрядов кодовой конструкции составной части или кодового сегмента восстановленного слова или другого сообщения, называемых младшими в соответствии с принятой позиционной структурой его восстановления, в результате чего находят целочисленные остатки от деления, строят гистограмму распределения их значений и в качестве инварианта, проявляющегося в виде группового значения «равноостаточности», выбирают в сформированной статистической выборке, состоящей из остатков, наиболее часто встречающееся значение, при этом все другие значения остатков, не совпадающие со значением найденного инварианта, являющегося техническим эталоном переданной информации, используют для обнаружения ошибок передачи результатов телеизмерений, значений строк цифровой информации, которые исправляют путем подстановки вместо них данных, достоверность которых подтверждают тем, что они при делении на второй модуль сравнения m2 дают значение остатка, равное инварианту, найденному для выделенного графического фрагмента, после обнаружения и исправления ошибок при воспроизведении преобразованной информации реализуют второй этап «жесткого» декодирования преобразованных данных телеизмерений, значений строк цифровой информации путем обратной перестановки местами ранее выделенных из слов или других сообщений их первоначальных составных частей и кодовых сегментов, в результате которой старшие и младшие составные части и кодовые сегменты снова занимают свое первоначальное позиционное положение, восстановленные при воспроизведении данные телеизмерений, значения строк цифровой информации с обнаруженными и исправленными ошибками регистрируют, в последующем при необходимости описанную процедуру обнаружения и исправления ошибок повторяют, но при дополнительном помехоустойчивом прямом структурно-алгоритмическом преобразовании или безызбыточном помехоустойчивом кодировании с другими значениями минимального кодового расстояния  , где i - надстрочный индекс повторения операций предварительной обработки, и заканчивают тогда, когда показатели достоверности восстанавливаемой при воспроизведении информации в режиме «отложенного времени» будут удовлетворять предъявляемым требованиям, либо тогда, когда корректирующие возможности известных способов структурно-алгоритмических преобразований будут исчерпаны, после чего последнюю версию восстановленных при воспроизведении данных используют в качестве обновленной копии информации с уменьшенным числом ошибок или подвергают фильтрации, последующей вторичной обработке и анализу, на основе которого принимают управляющие решения.
, где i - надстрочный индекс повторения операций предварительной обработки, и заканчивают тогда, когда показатели достоверности восстанавливаемой при воспроизведении информации в режиме «отложенного времени» будут удовлетворять предъявляемым требованиям, либо тогда, когда корректирующие возможности известных способов структурно-алгоритмических преобразований будут исчерпаны, после чего последнюю версию восстановленных при воспроизведении данных используют в качестве обновленной копии информации с уменьшенным числом ошибок или подвергают фильтрации, последующей вторичной обработке и анализу, на основе которого принимают управляющие решения.
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| СПОСОБ ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2434301C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2586605C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 7180943 B1, 20.02.2007. | |||

