Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур относится к средствам терморегулирования космических аппаратов и их частей. Способ может быть применен в системах автоматического управления контуром терморегулирования бортового оборудования (БО) космического аппарата (КА), функционирующего орбите, на каждом витке которой повторяются режимы работы БО и изменения ориентации относительно направления излучения Солнца. К указанным КА могут быть отнесены, например, спутники связи, телекоммуникации, телевещания, дистанционного зондирования Земли.
Обеспечение заданного температурного режима БО КА является одной из важнейших задач, решаемых на борту КА, поскольку даже кратковременное отклонение температуры от допустимых пределов может привести к нарушению функционирования БО и в конечном счете выходу из строя всего КА.
Во время полета КА по заданной орбите вокруг Земли на температуру его БО влияют, в основном, излучение Солнца и планет, а также внутреннее тепловыделение БО, обусловленное изменением режимов работы. Нагреву излучением Солнца в максимальной степени подвергается БО КА на освещенном участке орбиты, в то же время на теневом участке оно подвергается наиболее сильному охлаждению.
В современных КА, как правило, применяются сочетания активных и пассивных способов терморегулирования. При активных способах терморегулирования для стабилизации температуры на борту КА осуществляется принудительный нагрев или охлаждение отдельных элементов БО. С этой целью используются системы с циркуляцией хладагента, имеющие электрические нагревательные элементы, которые преобразуют электрическую энергию на борту КА в тепловую. Для подвода тепла используются теплообменные трубы с циркуляцией жидкости, при этом тепло от охлаждаемых источников передается к жидкости, которая затем охлаждается на специальных радиаторах, сбрасывающих тепло путем излучения в космическое пространство. В состав таких систем, как правило, входит радиационная панель (РП) с низкими показателями термического сопротивления, на которой размещаются служебные системы, то есть блоки БО, тепловые трубы, нагревательные элементы, а также датчики температур.
Радиационные панели, как правило, разбиваются на зоны температурного воздействия, в каждой из которых установлены датчики температур, нагревательные элементы и тепловые трубы. Блоки БО устанавливаются в зонах воздействия указанных нагревателей РП.
Автоматическое управление терморегулированием КА осуществляется при помощи бортовой системы управления (БСУ), выполненной на базе вычислительного комплекса, который обеспечивают автоматическое регулирование температуры в соответствии с алгоритмами, реализованными в виде программного обеспечения.
На РП размещаются датчики температур, часть из которых задействована в контуре управления системой терморегулирования, при этом результаты измерения температуры от них поступают непосредственно в БСУ. БСУ в соответствии с информацией, полученной от датчиков температур, обеспечивает автоматическое поддержание температурного режима БО в заданном диапазоне путем включения и отключения нагревателей. Информация из БСУ, в том числе полученная от датчиков температур поступает в бортовую систему телеметрических измерений и далее, в виде телеметрической информации, через бортовой радиотехнический комплекс по радиоканалу в наземный комплекс управления. Другая часть датчиков температур связана напрямую с бортовой системой телеметрических измерений, при этом результаты измерения температуры, а также информация о состоянии нагревателей также поступают через бортовой радиотехнический комплекс по радиоканалу в наземный комплекс управления.
В свою очередь, из наземного комплекса управления через бортовой радиотехнический комплекс в БСУ поступают команды, при помощи которых осуществляется управление настройками контура управления терморегулированием, а также команды, обеспечивающие непосредственное управление нагревателями в зонах РП.
Известен способ терморегулирования РП КА, который включает измерение температур в зонах РП системы терморегулирования, их сравнение с верхними и нижними предельными значениями и подвод тепла к РП при выходе температур на нижние значения. При этом определяют полетные интервалы, на которых потребляемая электроэнергия превышает вырабатываемую первичными бортовыми источниками. На этих же интервалах определяют количество электроэнергии, затраченной на терморегулирование РП. Определяют полетные интервалы для максимально возможного аккумулирования тепловой энергии на РП в указанных зонах в пределах допустимых температур. При этом учитывают затраты на терморегулирование РП, для этого перед началом полетных интервалов с превышением потребляемой электроэнергии над генерируемой подводят тепло в зоны РП, требующих расхода электроэнергии на их терморегулирование на этих интервалах. При этом подвод тепла осуществляют с учетом верхних предельных значений температур [1].
Наиболее близким является способ терморегулирования РП КА, включающий измерение температур в зонах панелей датчиками температур и поддержание температур в пределах допустимого диапазона. При этом изменяют температуры на интервалах времени, определяемых ориентацией КА относительно Солнца и планет. После каждого из изменений температур в какой либо зоне РП, измеряют температуру в прилегающих к ней зонах, фиксируя разность измеренных температур. Определяют температурные зависимости между зонами с учетом количества тепла, подводимого от установленных рядом с зонами смежных элементов. Дальнейшее терморегулирование в зонах производят с учетом определенных зависимостей, при этом, в случае выхода текущих температур в зонах за пределы допустимого диапазона, их увеличивают или уменьшают за счет регулирования количества тепла, подводимого к зонам от смежных элементов. В случае отказа элементов системы обеспечения теплового режима, терморегулирование в зоне производят путем подвода к ней тепла от соседних зон с работоспособными элементами. При этом обеспечивают выполнение условий, при которых были ранее определены температурные зависимости в зонах панели [2].
Недостатками известных способов терморегулирования является отсутствие возможности поддержания температуры в допустимых пределах при отказах или продолжительных сбоях датчиков температур, задействованных в контуре терморегулирования. Выявление температурных зависимостей между зонами РП является сложной задачей. Указанные зависимости могут изменяться, например, ввиду деградации или отказов датчиков температур. В известных способах не предусмотрены критерии, позволяющие исключать сбойные и отказные результаты измерений датчиков температур, задействованных в контуре управления. Отсутствие указанных критериев может привести к нарушениям функционирования контура, выходу фактических температур в зоне РП за допустимые пределы, что, в конечном итоге, может привести к отказам служебных систем. Сбои и отказы датчиков температур могут быть вызваны, например, электрическими разрядами, которые происходят в результате накопления на поверхностях блоков БО статического электричества, либо в результате воздействия ионизирующего излучения космического пространства и Солнца.
Технической задачей предлагаемого изобретения является расширение функциональных возможностей известного способа терморегулирования РП КА путем повышения его эффективности и живучести за счет автоматического выявления и исключения из обработки сбойных и отказных результатов измерений, а также поддержания температур в допустимых пределах при отказах всех задействованных в нем датчиков.
Указанный технический результат достигается тем, что в известном способе управления системой терморегулирования радиационных панелей космического аппарата, заключающемся в том, что измеряют температуру в i-тых зонах радиационных панелей датчиками температур, где i=l,2…n - номер зоны радиационной панели, поддерживают температуру в зонах радиационных панелей в пределах допустимого диапазона путем изменения температур посредством терморегуляторов, разбивают период оборота космического аппарата вокруг Земли на фиксированные интервалы времени, которые определяются ориентацией космического аппарата относительно Солнца и планет, дополнительно определяют по паспортным данным на установленные в зонах служебные системы допустимый диапазон температур, при котором обеспечивается их работоспособность, и максимально возможные рассогласования температур в местах установки первого, второго, третьего и четвертого датчиков температур в каждой i-той зоне, задают в середине допустимого диапазона температур для каждой i-той зоны поддерживаемый диапазон температур как:
где T°imax , T°imin - соответственно максимальная и минимальная граница допустимого диапазона температур i-той зоны;
T°iв, T°iн - верхняя и нижняя границы поддерживаемого диапазона температур i-той зоны;
T°ip - максимально возможное рассогласование температуры в местах установки первого, второго, третьего и четвертого датчиков i-той зоны, определяют для каждой i-той зоны минимальное время изменения температуры от нижней до верхней границы поддерживаемого диапазона температур, а также минимальное время увеличения температуры от нижнего до верхнего значения допустимого диапазона температур, разбивают каждый из фиксированных интервалов времени периода оборота космического аппарата вокруг Земли в каждой i-той зоне на локальные интервалы времени, в которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия, обусловленные изменением режимов работы установленных на ней служебных систем, во время полета космического аппарата измеряют и передают в наземный комплекс управления значения температур i-той зоны, измеренной первым, вторым и третьим датчиками температур, задействованными в контуре управления, а также температуры, измеренной четвертым датчиком, не задействованным в указанном контуре, и ток, потребляемый терморегуляторами во время включения нагрева, задают в каждой i-той зоне допустимое время непрерывного сбоя каждого датчика температуры в диапазоне более минимального времени, при котором температура изменяется от нижней до верхней границы поддерживаемого диапазона температур, и менее минимального времени, при котором температура указанной зоны радиационной панели увеличивается от нижнего до верхнего значения допустимого диапазона температур, во время полета космического аппарата для автоматического поддержания температуры в i-той зоне используют результаты измерений первого, второго и третьего датчиков, задействованных в контуре управления, у которых отсутствуют соответствующие сигналы отказов, определяют температуру i-той зоны как среднюю арифметическую величину между измеренными значениями трех или двух датчиков температур, задействованных в контуре управления, если измеренные значения отличаются между собой на величину, менее максимально допустимого рассогласования, определяют температуру i-той зоны как измеренное значение одного датчика температуры, если для него отсутствует, а для двух других датчиков имеются сигналы отказов, определяют температуру i-той зоны радиационной панели как среднее значение суммы максимальной, минимальной и удвоенного среднего значения температур, если максимальное и минимальное значения отличаются между собой на величину, более максимально допустимого рассогласования и при этом среднее значение измеренной температуры отличается от каждого из двух других на величину, не превышающую указанного рассогласования, подсчитывают и запоминают количество включений нагрева терморегулятора, суммарное время нагрева для каждой i-той зоны на каждом локальном интервале, отсчитывают время контроля каждого датчика температуры, задействованного в контуре управления, если для него отсутствует сигнал отказа, при этом измеренное им значение температуры отличается от соответствующих измеренных значений двумя другими датчиками на величину, превышающую максимально допустимое рассогласование, прекращают отсчет времени контроля датчика температуры и сбрасывают его, если измеренное значение не превышает величину максимально допустимого рассогласования хотя бы с одним из измеренных значений других датчиков, задействованных в контуре управления, формируют сигнал отказа датчика температуры, задействованного в контуре управления, и прекращают отсчет соответствующего времени контроля, если оно превышает допустимое время непрерывного сбоя, формируют сигналы отказа для каждого из двух оставшихся датчиков температур, задействованных в контуре управления i-той зоны, если при наличии сигнала отказа одного из датчиков рассогласование между указанными значениями превышает величину максимально допустимого рассогласования в течение времени более допустимого времени непрерывного сбоя, при наличии сигналов отказов трех датчиков температур, задействованных в контуре управления i-той зоны, включают нагрев на каждом локальном интервале указанной зоны с периодом, равным отношению длительности данного интервала к соответствующему запомненному значению количества включений нагрева, с длительностью нагрева на каждом периоде, равном отношению соответствующего запомненного суммарного времени нагрева к количеству включений нагрева, снимают в i-той зоне из наземного комплекса управления сигналы отказов датчиков, если измеренные ими значения в течение времени не менее одного локального интервала отличаются от результатов измерения соответствующего четвертого датчика на величину, не превышающую максимально допустимого рассогласования, при этом направления изменения соответствующего тока нагрева соответствуют направлениям изменения температуры.
КА, функционирующие на геостационарных орбитах, например спутники связи, осуществляют ретрансляцию телевизионных каналов на определенных участках орбиты, соответственно в определенные моменты времени выполняют типовые операции, связанные с изменением ориентации КА, переключением режимов приемо-передающей аппаратуры. Спутники, осуществляющие дистанционное зондирование Земли, функционирующие на солнечно-синхронных орбитах, также могут изменять ориентацию с переключением режимов работы БО в моменты времени, жестко связанные с определенными точками орбиты, например, для фотосъемки поверхности Земли. Указанные действия повторяются на каждом витке орбиты, в связи с этим орбита КА может быть разбита на типовые участки с повторяющимися температурными условиями. Учитывая, что КА вращается вокруг Земли с постоянной угловой скоростью и имеет фиксированный период оборота, каждому типовому участку орбиты с повторяющимися температурными условиями может быть поставлен в соответствие фиксированный момент времени.
Для реализации поставленной задачи период оборота КА вокруг Земли разбивают на фиксированные интервалы времени, которые определяются освещенностью РП, обусловленной положением КА относительно Солнца и планет. Каждый фиксированный интервал времени в каждой зоне РП разбивают, в свою очередь, на локальные интервалы времени, каждый из которых в каждой из зон должен характеризоваться одинаковыми температурными условиями, зависящими от режимов работы служебных систем.
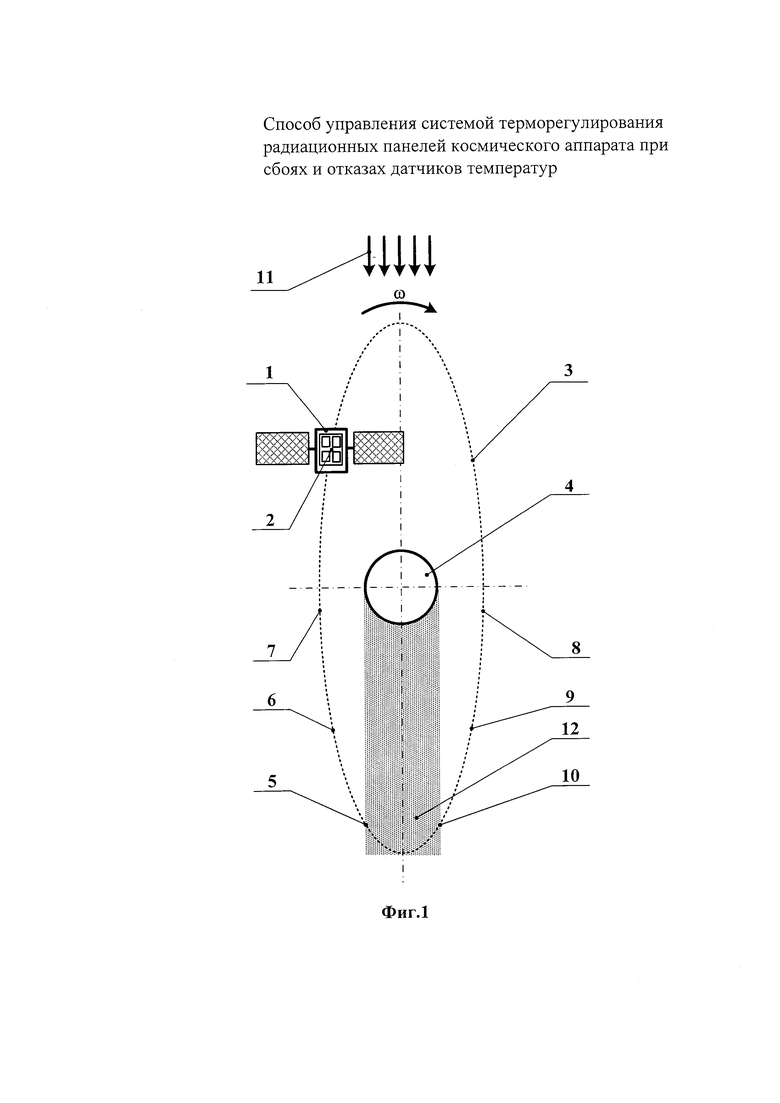
На фиг. 1 представлен пример деления орбиты КА с установленной на нем РП на фиксированные и локальные участки полета, на фиг. 2 - радиационная панель с установленным на ней оборудованием системы терморегулирования, на фиг. 3 - структурная схема контура управления системы терморегулирования КА для одной зоны РП панели и ее взаимодействие с наземным комплексом управления, на фиг. 4 представлены графики функционирования контура терморегулирования для одной зоны РП при отсутствии отказов датчиков температур, на фиг. 5 - графики изменения измеренных значений температуры датчиками, установленными в зоне РП при наличии сбоев и отказов, на фиг 6 представлены графики включения нагрева при наличии отказов датчиков температур, задействованных в контуре управления.
Способ управления системой терморегулирования радиационных панелей КА при сбоях и отказах датчиков температур осуществляется следующим образом.
На фиг. 1 представлен пример деления орбиты КА с установленной на нем РП на фиксированные и локальные участки полета, где:
1 - КА;
2 - РП, разбитая на зоны;
3 - круговая орбита КА;
4 - Земля;
5, 6, 7, 8, 9, 10 - точки смены локальных участков полета;
11 - направление излучения Солнца;
12 - тень Земли.
КА 1 с установленной на нем РП 2 вращается по орбите 3 вокруг Земли 4 с постоянной угловой скоростью ω. Орбита 3 разбита в точках 5, 10 на участки, соответствующие освещенной и теневой части орбиты. Для одной из зон РП фиксированные участки орбиты, в свою очередь, разбиты на локальные участки 5-6, 6-7, 7-8, 8-9, 9-10, 10-5, на каждом из которых повторяются температурные условия, зависящие от положения КА и режимов работы БО.
Каждому локальному участку орбиты в каждой зоне РП поставлен с соответствие локальный интервал времени, который характеризуется той или иной величиной нагрева зоны РП 2, зависящей от положения указанной панели относительно направления излучения Солнца 11, а также тепловыделением установленного в ней БО, то есть служебных систем. Периодически КА проходит через тень Земли 12.
Участок орбиты между точками 5 и 6 соответствует изменению режимов работы служебных систем, установленных на РП 2 перед началом выполнения возложенных на КА 1 задач. Участок орбиты между точками 6 и 7 соответствуют изменению ориентации КА 1, а следовательно и РП 2 относительно направления излучения Солнца 11 при выполнении возложенных на КА 1 задач. Участок орбиты между точками 7 и 8, соответствует максимальной степени нагрева РП 2 излучением Солнца 11. Участок орбиты между точками 8 и 9 соответствуют изменению ориентации КА 1, а следовательно и РП 2, относительно направления на Солнце при завершении выполнения возложенных на КА 1 задач. Участок орбиты между точками 9 и 10 соответствует изменению режимов работы служебных систем, установленных на РП 2 при завершении выполнения возложенных на КА 1 задач перед входом в тень Земли 12. На участке орбиты между точками 10 и 5 КА 1, а следовательно и РП 2 находятся в тени Земли 12, при этом РП 2 подвергается максимальному охлаждению.
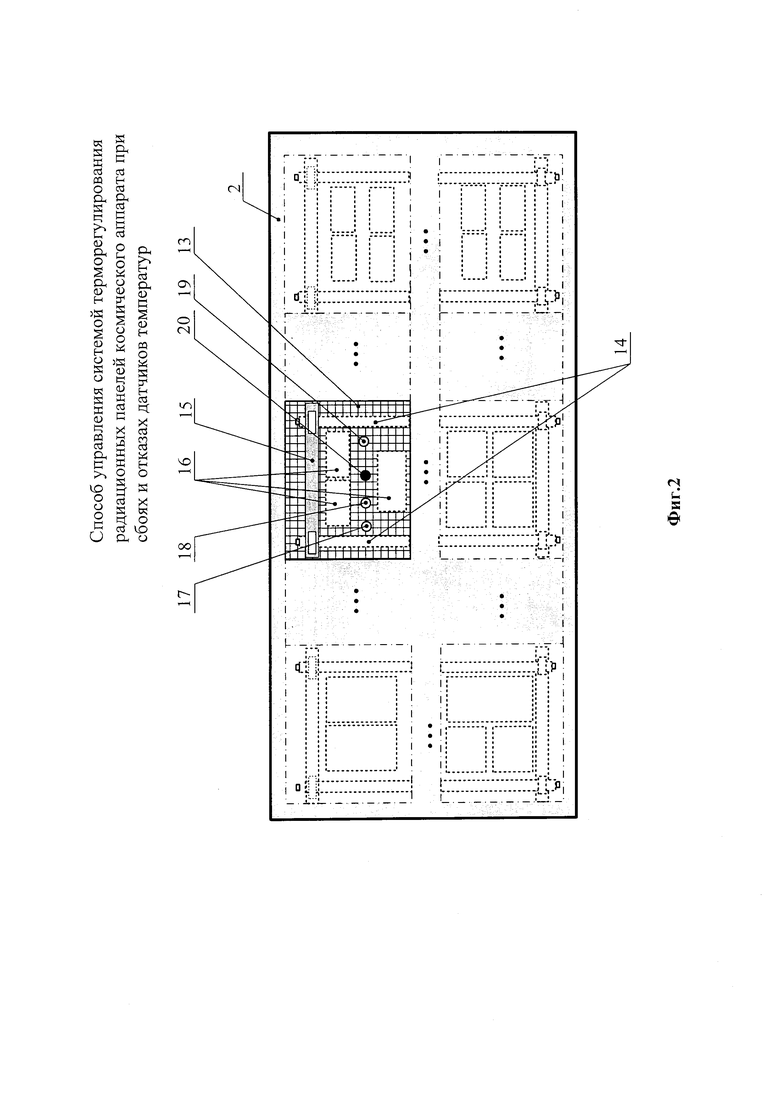
На фиг. 2 представлена РП с установленным на ней оборудованием системы терморегулирования, где:
13 - зона РП,
14 - установленные в зоне РП тепловые трубы;
15 - установленные в зоне нагревательные элементы;
16 - установленные в зоне РП служебные системы;
17, 18, 19 - установленные в зоне РП первый, второй и третий датчики температур соответственно, задействованные в контуре автоматического управления терморегулированием;
20 - установленный в зоне РП четвертый датчик температуры, не задействованный в контуре автоматического управления терморегулированием.
РП 2 разбита на несколько зон с установленными на них служебными системами, которые являются блоками БО. В зоне 13 РП 2 установлены тепловые трубы 14 с нагревательными элементами 15. В зоне 13 установлены служебные системы 16, для которых должны быть обеспечены требуемые температурные условия. Температура в зоне 13 измеряется при помощи первого 17, второго 18 и третьего 19 датчиков температур, задействованных, а также при помощи четвертого датчика температуры 20, не задействованного в контуре управления терморегулированием.
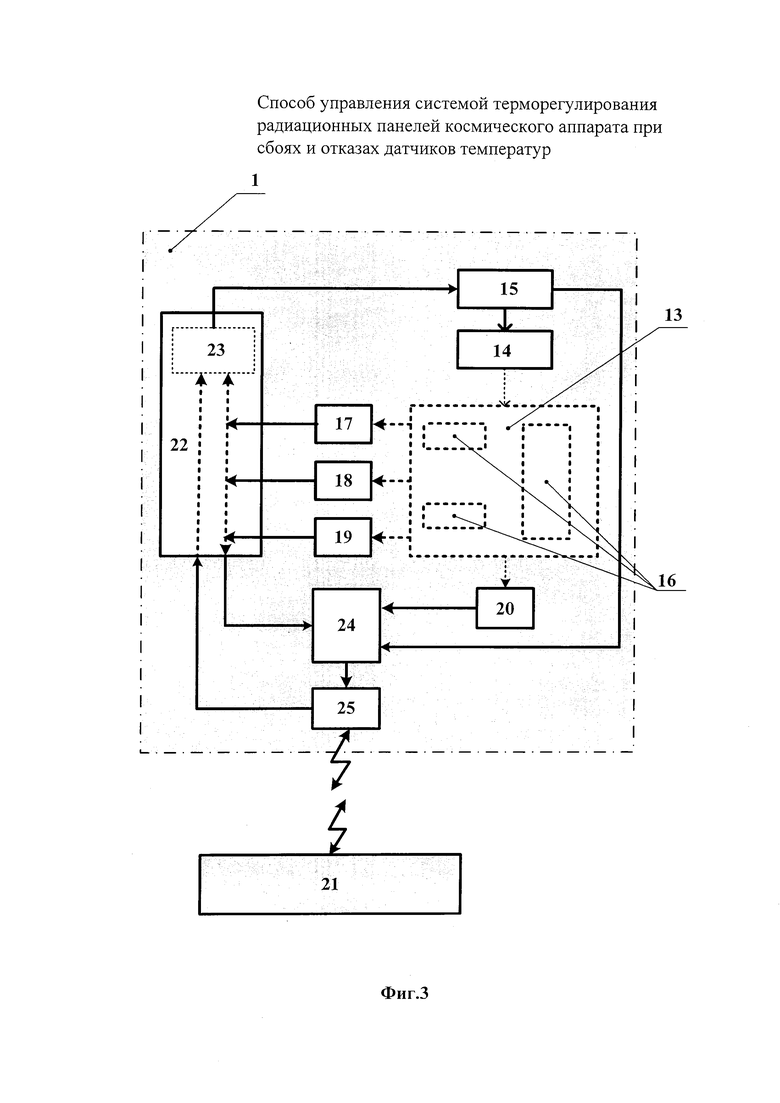
На фиг. 3 представлена структурная схема контура управления системы терморегулирования КА для одной зоны РП и ее взаимодействие с наземным комплексом управления, где:
21 - наземный комплекс управления;
22 - бортовая система управления;
23 - программное обеспечение бортовой системы управления;
24 - бортовая система телеметрических измерений;
25 - бортовой радиотехнический комплекс.
Контур управления терморегулированием КА 1 для зоны 13 РП включает бортовую систему управления 22, с программным обеспечением 23, нагреватели 15, тепловые трубы 14, первый 17, второй 18 и третий 19 датчики температуры. Указанный контур взаимодействует с наземным комплексом управления 21 при помощи бортовой телеметрической системы 24 и бортового радиотехнического комплекса 25. Кроме того, имеется датчик температуры 20, не задействованный в контуре управления. Измерение температуры зоны РП 13 с установленными на ней служебными системами 16 осуществляется датчиками температуры 17, 18, 19 задействованными, а также датчиком 20, не задействованным в контуре управления. Информация о температурах, измеренных датчиками 17, 18, 19 поступает в бортовую систему управления 22 для управления контуром терморегулирования, а также через нее в бортовую систему телеметрических измерений 24. Информация об измеренной датчиком 20 температуре, поступает только в бортовую систему телеметрических измерений 24. Информация о температурах зоны 13, измеренных датчиками 17, 18, 19 в виде соответствующих кодов поступает на вход бортовой системы управления 22 и обрабатывается программным обеспечением 23, которое осуществляет сравнение полученной информации с поддерживаемым диапазоном температур. В результате указанного сравнения программное обеспечение 23 формирует коды, которые преобразуются в команды, поступающие из бортовой системы управления 22 на вход нагревателей 15 которые, в свою очередь, осуществляют нагрев тепловых труб 14. Информация о величине тока нагревателей 15 поступает в бортовую систему телеметрических измерений 24. Тепловые трубы 14 распределяют температуру в той зоне 13 РП. При отсутствии нагрева температура зоны 13 РП понижается за счет излучения тепла в космическое пространство. Информация о температурах, измеренных датчиками 17, 18, 19, 20, а также о величине тока нагревателей 15 из бортовой системы телеметрических измерений 24, через бортовой радиотехнический комплекс 25 передается по радиоканалу в наземный комплекс управления 21. Команды из наземного комплекса управления 21 на переключение режимов работы контура управления терморегулированием, в том числе на снятие отказов каждого из трех датчиков температур 17, 18, 19 передаются по радиоканалу, через бортовой радиотехнический комплекс 25 в бортовую систему управления 22.
Уровень доверия к информации, передаваемой от датчиков температур 17, 18, 19, 20 в наземный комплекс управления 21, зависит от параметров надежности трактов передачи информации от них. Вероятности безотказной работы трактов, обеспечивающих передачу информации от датчиков температуры 17, 18, 19, 20 на выход бортового радиотехнического комплекса 25 включают вероятности безотказных работ составляющих устройств, то есть:




где Р1, Р2, Р3, Р4 - соответственно вероятности безотказной работы трактов передачи информации от первого 17, второго 18 и третьего 19 датчиков температур;
Рдт1, Рдт2, Рдт3, Рдт4 - соответственно вероятности безотказной работы первого 17, второго 18 и третьего 19 датчиков и четвертого 20 датчиков температур;
Рсу1, Рсу2, Рсу3 - соответственно вероятности безотказной работы элементов БСУ задействованных в передаче и обработке информации от первого 17, второго 18 и третьего 19 датчиков температур, задействованных в контуре управления;
Рсти22, Рсти4 - соответственно вероятности безотказной работы элементов бортовой системы телеметрических измерений 24 и с четвертым датчиком 20 с учетом элементов задействованных в передаче и обработке информации;
Рбртк - вероятность безотказной работы бортового радиотехнического комплекса 25.
Учитывая, что вероятности безотказной работы отдельных элементов, обеспечивающих сбор и передачу информации на выход бортового радиотехнического комплекса приблизительно равны, то есть:

БСУ 22 представляет собой сложный комплекс, включающий бортовые вычислительные машины, блоки сопряжения с бортовым оборудованием, линии связи, вторичные источники питания и т.п. Блоки, входящие в состав БСУ, в свою очередь, могут содержать, например, аналого-цифровые и цифро-аналоговые преобразователи, усилители мощности, коммутационные элементы. Указанные элементы учитываются при расчете вероятности безотказной работы элементов БСУ 22 задействованных в передаче и обработке информации от датчиков температуры. Как правило, вероятность безотказной работы указанных элементов БСУ 22 не превышают вероятность безотказной работы бортовой системы телеметрических измерений 24. Информация от датчика температуры 20 поступает непосредственно в бортовую систему телеметрических измерений 24, минуя бортовую систему управления 22, из чего следует, что:
Р4>Р1, Р4>Р2, Р4>Р3
Учитывая соотношения вероятностей, очевидно, что уровень доверия к информации, передаваемой в наземный комплекс управления от четвертого датчика температуры 20 выше уровня доверия к информации передаваемой отдатчиков температуры 17, 18, 19.
Для реализации предлагаемого способа по паспортным данным на служебные системы, то есть на установленные в каждой зоне РП блоки БО, определяют максимальную и минимальную температуры допустимого диапазона температур, при которых обеспечивается их работоспособность. Величина допустимого диапазона температур i-той зоны РП вычисляется как:

где ∆T°допi - допустимый диапазон температур в i-той зоне РП;
i=l, 2,…n, где n - количество зон РП;
T°maxi , T°mini - соответственно максимальная и минимальная температура в i-той зоне РП при которых обеспечивается работоспособность установленного в ней БО.
Перед началом полета КА в наземных условиях имитируют реальные условия функционирования каждой зоны РП с установленными блоками БО, датчиками температуры и нагревателями. В процессе испытаний исследуют функционирование каждой i-той зоны РП с установленными на ней нагревателями и тепловыми трубами в условиях, приближенных к реальным для каждого локального интервала времени. Резкие перепады температур, длительностью на порядок и менее длительности локального интервала времени, даже если они входят в допустимый диапазон температур, вследствие расширения и сжатия конструктивных элементов БО могут приводить к нарушениям контактных, паяных, сварных, механических соединений, что, в свою очередь, вызывает сбои и отказы указанных систем. В то же время плавные, постепенные изменения температуры, в i-той зоне РП длительностью не менее одного локального интервала времени, если они также входят в допустимый диапазон температур, практически не влияют на функционирование расположенных в ней служебных систем. В связи с этим целесообразно минимизировать изменения температуры либо обеспечить ее медленное изменение в границах указанного допустимого диапазона температур. По паспортным данным и по результатам экспериментов для каждой i-той зоны РП определяют максимально возможные рассогласования температур в местах установки датчиков температуры. В границах допустимого диапазона температур i-той зоне РП задают поддерживаемый диапазон температур, как:
где ∆T°paci - максимально возможное рассогласование температур в i-той зоне РП в местах установки датчиков температур;
∆T°подi - поддерживаемый диапазон температур в i-той зоне РП;
∆T°допi - максимально допустимое рассогласование температур в i-той зоне РП в местах установки датчиков температур;
T°вi, T°нi - соответственно верхняя и нижняя границы поддерживаемого диапазона температур в i-той зоне.
Для повышения температуры выходящей за пределы поддерживаемого диапазона температур в i-той зоне РП осуществляется периодическое включение нагревателей, размещенных на соответствующих тепловых трубах указанной зоны.
Снижение выходящей за пределы поддерживаемого диапазона в i-той зоне РП температуры, например, при пассивных способах терморегулирования, осуществляется конструктивными элементами РП, выполняющими сброс избытка тепла в космическое пространство. В процессе проектирования путем расчетов и экспериментов определяют и задают характеристики элементов РП, которые обеспечивают гарантированное понижение температуры при превышении верхней границы поддерживаемого диапазона температур в i-той зоне РП с учетом максимально возможного нагрева БО за счет тепловыделения излучения Солнца. Аналогично, в процессе проектирования и экспериментов для каждого локального интервала i-той зоны РП определяют и задают характеристики нагревательных элементов, которые обеспечивают изменение температуры в границах поддерживаемого диапазона при отсутствии излучения Солнца и минимально возможном тепловыделении установленного в i-той зоне БО. Ток потребления нагревателей каждой i-той зоны РП имеет, как правило, фиксированную величину. С целью минимизации затрат электроэнергии на борту КА, как правило, в i-той зоне РП устанавливают нагреватели, потребляющие фиксированный ток, приближенный к минимально необходимому значению, например, в диапазоне:
где Iнфi- минимально необходимая величина тока нагревателей при отсутствии внешнего нагрева и минимально возможном тепловыделении БО, установленного в i-той зоне РП;
Iнi - ток нагревателей i-той зоны РП.
На наземных стендах, в результате экспериментов по поддержанию температур в зонах РП при имитации реальных условий функционирования, для каждого локального интервала в каждой зоне РП определяют необходимый фиксированный ток нагревателей, количество включений, а также суммарную длительность включения нагрева.
В процессе функционирования контура управления терморегулированием, в процессе поддержания температуры i-той зоны РП, осуществляется периодическое включение и отключение нагревателей, при этом интервалы и длительности включения могут отличаться на различных локальных интервалах. Задают период измерения температуры в i-той зоне РП на порядок и менее минимального времени изменения температуры от нижнего T°нi до верхнего T°вi значения поддерживаемого диапазона температур, который определяют по результатам экспериментов, то есть:

где Tизмi - задаваемый период измерения температур в i-той зоне РП;
∆tmini - минимальное время изменения температуры от нижнего до верхнего значения поддерживаемого диапазона температур в i-той зоне РП.
В процессе функционирования КА на орбите величины рассогласования между температурами, измеренными тремя датчиками температуры, задействованными в контуре управления, могут изменяться. Указанные изменения могут происходить, например, из-за неравномерного нагрева в местах установки указанных датчиков, ввиду изменения тепловыделения установленных на ней блоков БО или изменения ее положения относительно направления на Солнце. Указанные факторы учитывают при определении максимально допустимого рассогласования между датчиками температур во время испытаний в наземных условиях.
Во время полета КА по орбите на каждом локальном интервале в каждой i-той зоне РП осуществляют подсчет и запоминание суммарного времени включения нагревателей, а также количества включений. По окончании каждого локального интервала i-той зоны РП на каждом витке орбиты вычисляют и запоминают усредненный период включения нагрева как отношение длительности указанного интервала к количеству включений нагрева, то есть:
где Tijk - усредненный период включения нагрева в i-той зоне на j-том локальном интервале, на k-том витке орбиты;
j=1, 2,…n1, где n1 - количество локальных интервалов;
k=1, 2,…n2, где n2 - количество витков орбиты.
Δtij - длительность j-го локального интервала в i-той зоне РП;
Nijk - количество включений нагрева в i-той зоне РП на j-том локальном интервале, на k-том витке орбиты.
По окончании каждого j-го локального интервала, на каждом k-том витке орбиты вычисляют и запоминают усредненную длительность нагрева на каждом периоде нагрева i-той зоны РП, как:
где Δτijk - усредненная длительность нагрева i-той зоны РП на j-том локальном интервале, на k-том витке орбиты;
Σtijk - суммарное время нагрева i-той зоны РП на j-том локальном интервале, на k-том витке орбиты.
В процессе управления определяют и запоминают максимальное, среднее и минимальное значения температур, измеренные первым, вторым и третьим датчиками температур, задействованными в контуре управления, с периодом на порядок и менее минимальной длительности нагрева, в соответствии с (1), при этом:
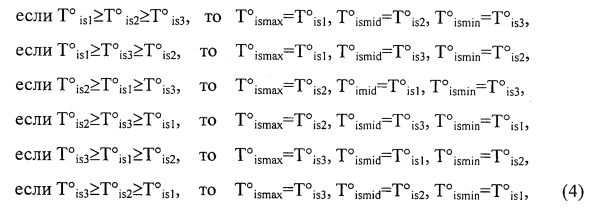
где T°ismax, T°ismid, T°ismin - максимальное, среднее и минимальное значения температур измеренных первым вторым и третьим датчиками, задействованными в контуре управления i-той зоны на s-том цикле измерения;
T°is1, T°is2, T°is3 - значения температур измеренных первым вторым и третьим датчиками i-той зоны на s-том цикле измерения;
s=1,2,…n3, где n3 - количество циклов измерения.
Во время функционирования КА на орбите возможны искажения измеренных значений температур из-за сбоев или отказов, вызываемых, например, обрывом связей датчиков с системой управления, кратковременным воздействием статических разрядов, накапливаемых на поверхности бортового оборудования КА. Кроме того, искажения измеренных значений температур может быть обусловлено длительным или кратковременным воздействием высокоэнергетических частиц космического или Солнечного излучения. Указанные воздействия могут влиять непосредственно как на датчик, так и на тракт передачи информации от указанного датчика в бортовую систему управления. Вычисление температуры в i-той зоне РП осуществляется по различным формулам, которые зависят от величины рассогласования температур измеренных первым, вторым и третьим датчиками температур, установленных в этой зоне. Применение той или иной формулы для обработки информации от датчиков обуславливается уровнем доверия к измеренным значениям температур.
В случае, если на s-том цикле измерения температуры первым, вторым и третьим датчиками температур в i-той зоне РП, задействованными в контуре управления, рассогласование между запомненными максимальным T°ismax, минимальным T°ismin значениями температур, определенных по формулам (4) не превышает максимально допустимого рассогласования ΔT°допi, то вычисляют достоверное значение температуры в i-той зоне РП на s-том цикле измерения как среднюю арифметическую величину между указанными значениями, то есть, если:
где T°si - достоверное значение температуры на s-том цикле измерения в i-той зоне РП.
Если на s-том цикле измерения температуры первым, вторым и третьим датчиками температур, задействованными в контуре управления в i-той зоне РП, запомненное максимальное T°ismax или минимальное T°ismin значение температуры отличается от среднего значения T°ismid на величину более максимально допустимого рассогласования ΔT°допi, а разность между двумя остальными значениями не превышает указанного рассогласования, то максимальное T°ismax или минимальное T°ismin значение игнорируют, при этом вычисляют достоверное значение температуры в i-той зоне РП, учитывая формулы (4), как среднее значение между оставшимися двумя значениями, то есть:



В случае если на s-том цикле измерения рассогласование между максимальной T°ismax и минимальной T°ismin запомненными значениями температур превышают величину допустимого рассогласования ΔT°допi и при этом рассогласование между максимальным T°ismax и средним T°ismid, а также между средним T°ismid и минимальным T°ismin значениями не превышает величину максимально допустимого рассогласования ΔT°допi, то вычисляют достоверное значение температуры в i-той зоне РП, учитывая формулы (4), как среднее значение суммы максимального, минимального и удвоенного среднего запомненного значения температур, так как уровень доверия к среднему значению температуры считают выше, то есть:

Задают для первого, второго и третьего датчиков температуры задействованных в контуре управления терморегулированием i-той зоны РП максимально допустимое время непрерывного сбоя, в диапазоне более одного периода измерения и менее минимального времени, при котором температура указанной зоны РП увеличивается от минимального до максимального значения допустимого диапазона температур, то есть:

где Δtдопi - максимально допустимое время непрерывного сбоя датчика температуры в i-той зоне РП задействованного в контуре управления;
timm - время увеличения температуры от минимального до максимального значения в допустимом диапазоне температур в i-той зоне РП.
Начинают отсчет времен контроля первого, второго или третьего датчика температуры в i-той зоне РП, если рассогласование между температурой измеренной одним из датчиков превышает величину максимально допустимого рассогласования между температурами, измеренными каждым из двух других датчиков, то есть:



где tk1i, tk2i, tk3i - соответственно отсчитываемые времена контроля первого, второго и третьего датчика температуры.
Прекращают отсчет соответствующих времен контроля и сбрасывают их в случае, если разность температур между датчиками не превышает величины допустимого рассогласования, то есть:



Формируют сигнал отказа и прекращают определение значения температуры i-той зоны РП по его показаниям, если время контроля сбоя датчика температуры превышает допустимое время непрерывного сбоя датчика температуры, то есть:



где Uотк1i, Uотк2i, Uотк3i - соответственно сигналы отказов первого, второго и третьего датчиков i-той зоны РП соответственно.
Прекращают управление температурой по измеренным значениям температуры в i-той зоне РП, если рассогласование между всеми датчиками превышает величину допустимого рассогласования в течение времени, более допустимого непрерывного сбоя датчика температуры, при этом формируют сигналы отказов для всех датчиков i-той зоны РП, то есть:
При наличии сигналов отказов всех трех датчиков, задействованных в контуре управления, осуществляют периодические включения и отключения нагрева на каждом локальном интервале в соответствии с запомненными значениями периодов и времен включения вычисленными по формулам (2) и (3).
В реальных условиях функционирования КА фактические величины поддерживаемых температур в i-той зоне РП могут постепенно изменяться и незначительно выходить за границы поддерживаемого диапазона температур из-за неравномерности нагрева элементов, маневров КА, нештатного функционирования бортового оборудования и прочих причин. Отклонения температуры, обусловленные указанными факторами, если они находятся в пределах допустимого диапазона, в целом, не оказывают влияния на функционирование бортового оборудования КА.
Если при наличии одновременно сигналов отказов первого 17, второго 18 и третьего 19 датчиков температуры, представленных на фиг. 3, задействованных в контуре управления в i-той зоне РП 13 по результатам анализа телеметрической информации, поступающей в наземный комплекс управления 21 в течение времени не менее одного локального интервала рассогласование между измеренными значениями температуры одним из указанных датчиков отличается и измеренного значения четвертым датчиком 20, не задействованным в контуре управления на величину, не превышающую допустимого рассогласования ΔT°допi, то из наземного комплекса управления 21 через бортовой радиотехнический комплекс 25 выдают в бортовую систему управления 22 команды на снятие соответствующего сигнала отказа. После этого осуществляют автоматическое управление контуром терморегулирования i-той зоны РП с контролем по соответствующему датчику, принимая его значение в качестве достоверного значения температуры, то есть:
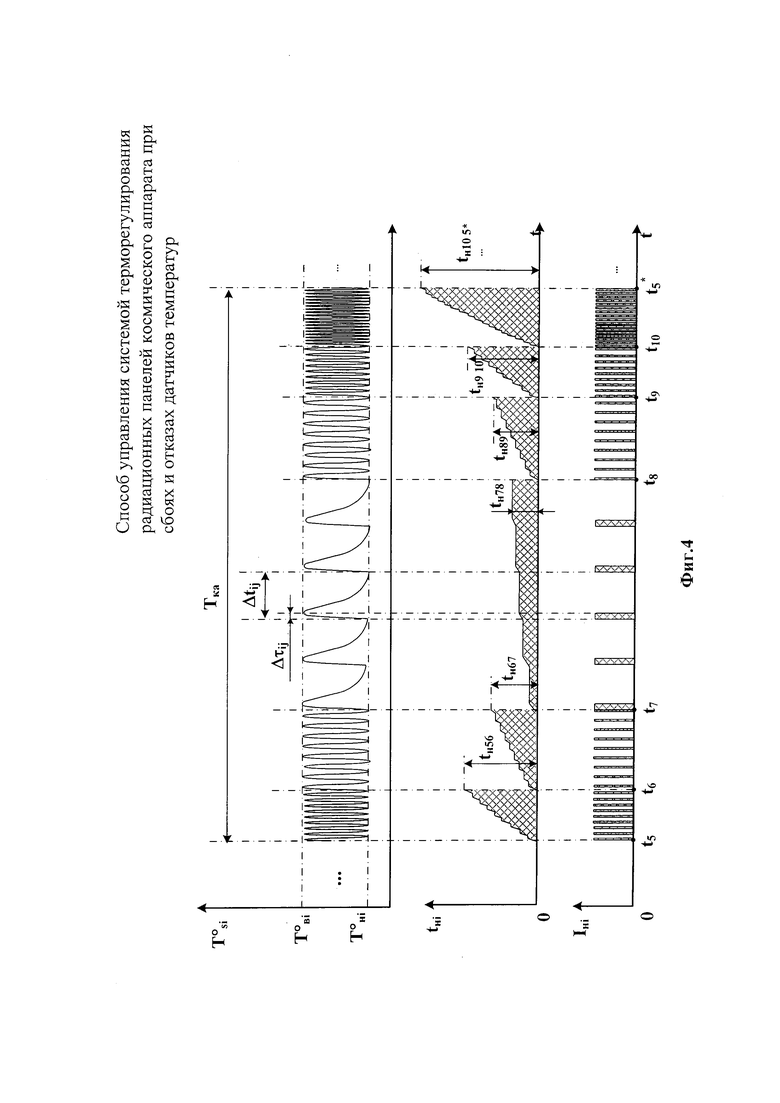
На фиг. 4 представлены графики функционирования контура управления терморегулированием для одной зоны РП при отсутствии отказов датчиков температур, где:
T°si - достоверные значения температуры в i-той зоне РП на s-том цикле измерения,
t - время;
T°вi, T°нi - верхняя и нижняя границы поддерживаемого диапазона температур в i-той зоне РП соответственно;
tнi- время включения нагрева;
Iнi - ток нагрева;
TКА - период оборота КА вокруг Земли;
Δτij - длительность включения нагрева в i-той зоне РП на j-тым локальном интервале где j=1,2,…n2;
Δtij - интервал между включениями нагрева в i-той зоне РП на j-тым локальном интервале.
t5, t6, t7, t8, t9, t10,  - моменты смены локальных интервалов времени.
- моменты смены локальных интервалов времени.
tн56, tн67, tн78, tн89, tн910, tн10 5* - суммарные времена нагрева на локальных интервалах времени.
Локальные интервалы времени, представленные на фиг. 4 соответствуют участкам полета КА 1 на орбите 3, показанным на фиг. 1.
Во время полета КА по орбите отсчитывают орбитальное время в диапазоне:
0≤tорб<Tка,
где tорб - отсчитываемое орбитальное время.
Период оборота КА вокруг Земли Tка разбит на локальные интервалы времени t5-t6, t6-t7, t7-t8, t8-t9, t9-t10, t10-t5 *, соответствующие участкам полета 5-6, 6-7, 7-8, 8-9, 9-10, 10-5*. Указанные участки полета повторяются на каждом витке орбиты КА.
На j-ом локальном интервале времени в i-той зоне РП, как правило, интервалы между включениями нагрева Δtij и длительности включения нагрева Δτij отличаются незначительно. В основном, указанные отличия наблюдаются в моменты переключения режимов работы бортового оборудования на достаточно коротких интервалах времени на границах локальных интервалов, поэтому ими можно пренебречь.
Суммарные времена нагрева tн56, tн67, tн78, tн89, tн910, tн10 5* в моменты t6, t7, t8, t9, t10, t5 * соответствуют суммарным временам включения нагревателей на соответствующих локальных интервалах времени t5-t6, t6-t7, t7-t8, t8-t9, t9-t10, t10-t5 *,
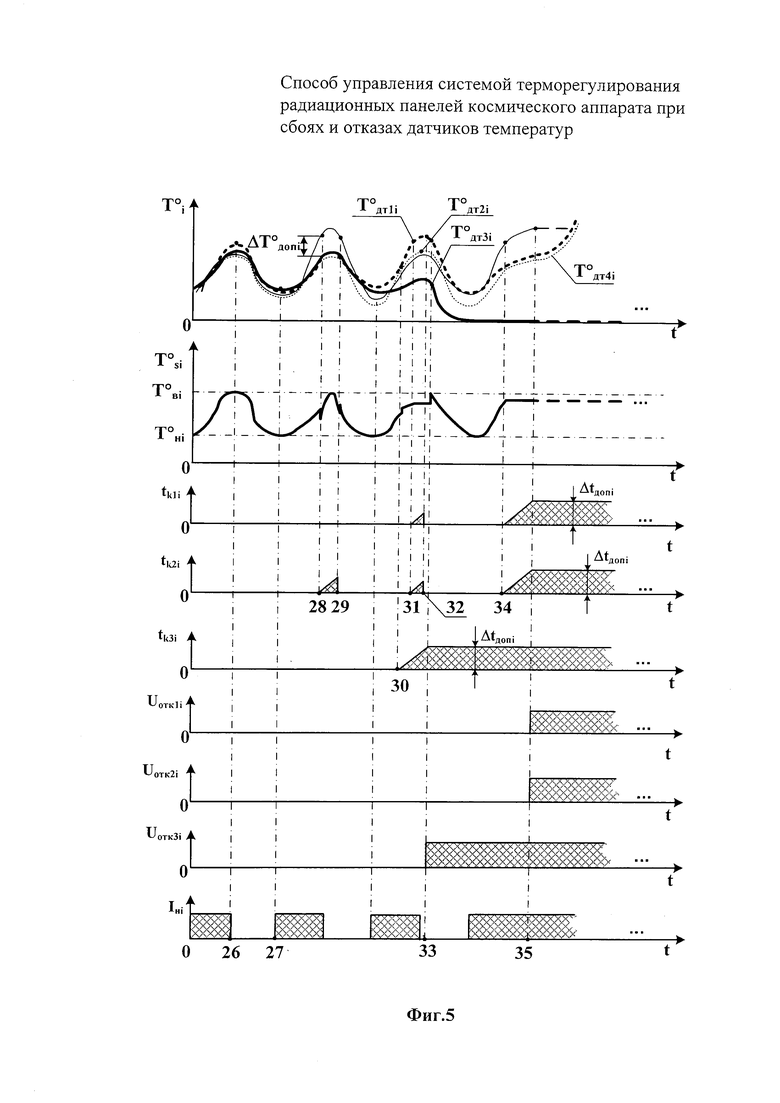
Ha фиг. 5 представлены графики изменения измеренных значений, температуры датчиками, установленными в i-той зоне РП при наличии сбоев и отказов, где:
T°i - значение температуры в i-той зоне РП;
T°дт1i, T°дт2i, T°дт3i - значения температур измеренных первым, вторым и третьим датчиками в i-той зоне РП, задействованных в контуре управления;
T°дт4 - значение температуры в i-той зоне РП, измеренной датчиком, не задействованным в контуре управления;
Δtдопi - допустимое время непрерывного сбоя датчика температуры в i-той зоне РП;
Iнi - ток нагревательных элементов системы терморегулирования в i-той зоне РП;
tk1i, tk2i, tk3i - время контроля сбоя первого, второго и третьего датчиков температур, задействованных в контуре управления в i-той зоне РП;
26, 27 - соответственно моменты достижения верхней T°вi, и нижней T°нi границ поддерживаемого диапазона температур в i-той зоне РП;
31, 34 - моменты начала отсчета времени контроля tk1i первого датчика температуры в i-той зоне РП;
28, 31, 34 - моменты начала отсчета времени контроля tk2i второго датчика температуры в i-той зоне РП;
30 - момент начала отсчета времени контроля tk3i третьего датчика температуры в i-той зоне РП;
29, 32 - моменты окончания отсчета времени контроля для второго датчика в i-той зоне РП;
32 - момент окончания отсчета времени контроля для первого датчика в i-той зоне РП;
33 - момент формирования сигнала отказа третьего датчика в i-той зоне РП;
35 - момент формирования сигнала отказа первого и второго датчиков, совпадающий с моментом прекращения управления нагревателями по измеренным значениям температур и начала управления с периодическим включением нагрева.
В моменты 26 и 27 достоверные значения температуры T°si в i-той зоне РП достигают, соответственно верхней T°вi, и нижней T°нi границы поддерживаемого диапазона температур, при этом до момента 27 рассогласование между измеренными значениями температур T°дт1, T°дт2, T°дт3, составляет менее максимально допустимого рассогласования ΔT°допi и значение температуры РП вычисляют по формуле (5).
Начиная с момента 28 до момента 29 начинается отсчет времени контроля сбоя второго датчика tk2i, так как значение температуры, измеренное датчиком T°дт2i отличается от значения температуры, измеренной датчиками T°дт1i и T°дт3i, на величину более допустимого рассогласования ΔT°допi, при этом вычисляют достоверное значение температуры i-той зоны РП T°si по формуле (6).
Начиная с момента 30 и до момента 33 рассогласование между температурами T°дт2i и T°дт1i, T°дт2i и T°дт3i, превышает ΔT°допi, а начиная с момента 31 и до момента 32 рассогласование между температурами T°дт1i и T°дт2i превышает ΔT°допi В связи с этим достоверное с момента 30 до момента 31 вычисляют достоверное значение температуры по формуле (8), а с момента 31 до момента 32 достоверное значение температуры не изменяется, при этом с момента 31 до момента 32 отсчитывается времена контроля tk1i, tk2i, а с момента 30 до момента 33 времена контроля tk2i.
В момент 33 время контроля tk3i превышает допустимое время непрерывного сбоя третьего датчика температуры Δtдопi, то есть tk3i>Δtдоп, при этом формируют сигнал отказа третьего датчика температуры Uотк3i=1 и прекращают учитывать измеренное значение температуры T°дт3i при вычислении значения температуры зоны РП.
В момент 32 рассогласование между температурой T°дт1i и T°дт2i, измеренной первым и вторым датчиками, менее допустимого рассогласования ΔT°доп, при этом температуру до момента 35, учитывая формулы (6) и (7), поскольку T°дт1i = T°ismax, T°дт2i = T°ismin, вычисляют, как среднее значение между ними по формуле:

В момент 35 формируют сигналы отказа Uотк1i =1, Uотк2i =1, так как рассогласование между температурами T°дт1i и T°дт2i более величины допустимого рассогласования ΔT°доп в течение времени более допустимого времени непрерывного сбоя датчика температуры Δtдопi. Одновременно начиная с момента 35 прекращают управление контуром терморегулирования с контролем по измеренным значениям, при этом осуществляют периодическое включение нагрева на локальных интервалах с периодом Tijk на время Δτijk, в соответствии с запомненными значениями, вычисленным по формулам (2) и (3). Измеренные значения температур T°дт1i, T°дт2i, T°дт3i и T°дт4i передаются в наземный комплекс управления в виде кодов телеметрической информации.
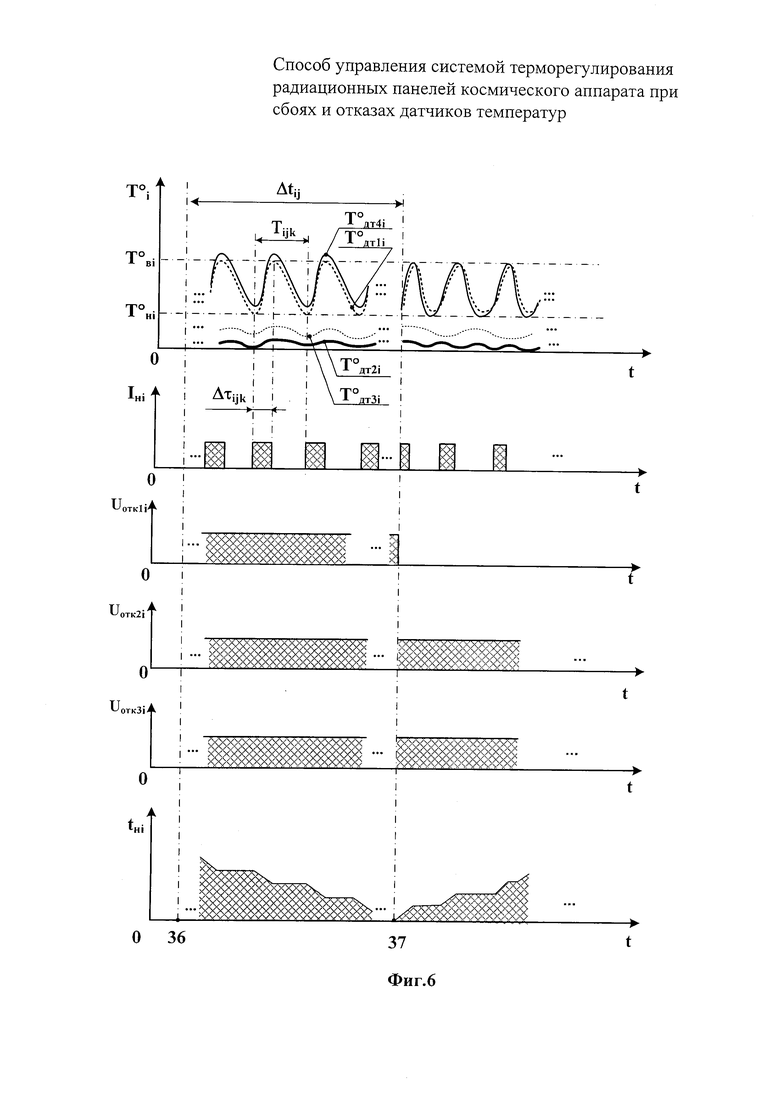
На фиг. 6 представлены графики включения нагрева при наличии отказов всех датчиков температур, задействованных в контуре управления.
36, 37 - моменты начала и окончания j-го локального интервала времени i-той зоны РП.
На локальном интервале времени 36-37, при наличии отказов первого второго и третьего датчиков температуры, задействованных в контуре управления, то есть при Uотк1i =1, Uотк2i =1, Uотк3i =1 включение нагревателей данной зоны РП осуществляется с фиксированным периодом Tijk, на фиксированное время Δτijk, вычисленных по формулам (2) и (3) на k-том витке орбиты КА перед отказами датчиков температуры. Анализ изменения температур T°дт1i и T°дт4i, передаваемых в наземный комплекс управления в виде телеметрической информации показывает, что их значения отличаются между собой на величину менее допустимого рассогласования ΔT°допi, то есть на s-тых циклах измерения |T°is1 - T°is4|≤ΔT°допi. В то же время изменения температуры соответствуют изменениям тока нагрева Iнi.
В то же время изменения температур T°дт2i и T°дт3i не соответствуют изменениям тока нагрева Iнi, и при этом на s-тых циклах измерения сохраняются условия:
Таким образом, можно утверждать, что измеренная задействованным в контуре управления датчиком температура T°дт1i соответствует значению температуры i-той зоны РП. В момент 37 при помощи команд из наземного комплекса управления осуществляется снятие соответствующего сигнала отказа Uотк1i=0, при этом осуществляется включение управления контуром с обратной связью по температуре измеренной первым датчиком T°дт1i.
В реальных условиях функционирования контура управления терморегулированием при функционировании без обратной связи по датчикам температуры температура i-той зоны РП может выходить за границы предельных значений поддерживаемого диапазона температур, что может быть обусловлено, например, отклонением ориентации КА относительно направления излучения Солнца в течение года, неравномерным характером указанного излучения, нештатной работой бортовых систем и другими факторами. Отклонения температуры i-той зоны РП за границы поддерживаемого диапазона температур, в целом, не влияет на работу бортового оборудования КА, так как изменения происходят медленно, при этом выход за пределы максимально и минимально допустимой температур не наблюдается. Кроме того, при значительных отклонениях температур из наземного контура управления могут быть выданы команды на корректировку длительности и периодов следования нагрева указанной зоны РП.
Предлагаемый способ управления системой терморегулирования позволяет повысить достоверность определения температуры РП, оперативно обнаруживать и исключать нештатные значения датчиков температур, обусловленные сбоями и отказами, а также обеспечивать поддержание температурного режима бортового оборудования на РП при полном отказе датчиков температур, задействованных в контуре управления.
Реализация данного способа позволяет повысить надежность системы терморегулирования, а следовательно увеличить сроки эксплуатации КА в целом.
Источники информации
1. Патент РФ №2262468, 20.10.2005 г., кл. B64G 1/50.
2. Патент РФ №2310587, 20.11.2007 г., кл. B64G 1/50.
Изобретение относится к системам терморегулирования космических аппаратов (КА). Способ заключается в том, что измеряют температуру в зонах радиационных панелей (РП) датчиками температур, поддерживают температуру в зонах РП в пределах допустимого диапазона путем изменения температур посредством терморегуляторов, разбивают период оборота КА вокруг Земли на фиксированные интервалы времени, которые определяются ориентацией КА относительно Солнца и планет. Определяют по паспортным данным на установленные в зонах служебные системы допустимый диапазон температур, максимально возможные рассогласования температур в местах установки четырех датчиков температур в каждой зоне. Разбивают каждый из фиксированных интервалов времени периода оборота КА вокруг Земли в каждой зоне на локальные интервалы времени, в которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия. Во время полета КА измеряют и передают в наземный комплекс управления значения температур каждой зоны и ток, потребляемый терморегуляторами. Техническим результатом изобретения является повышение эффективности и живучести системы терморегулирования КА. 6 ил.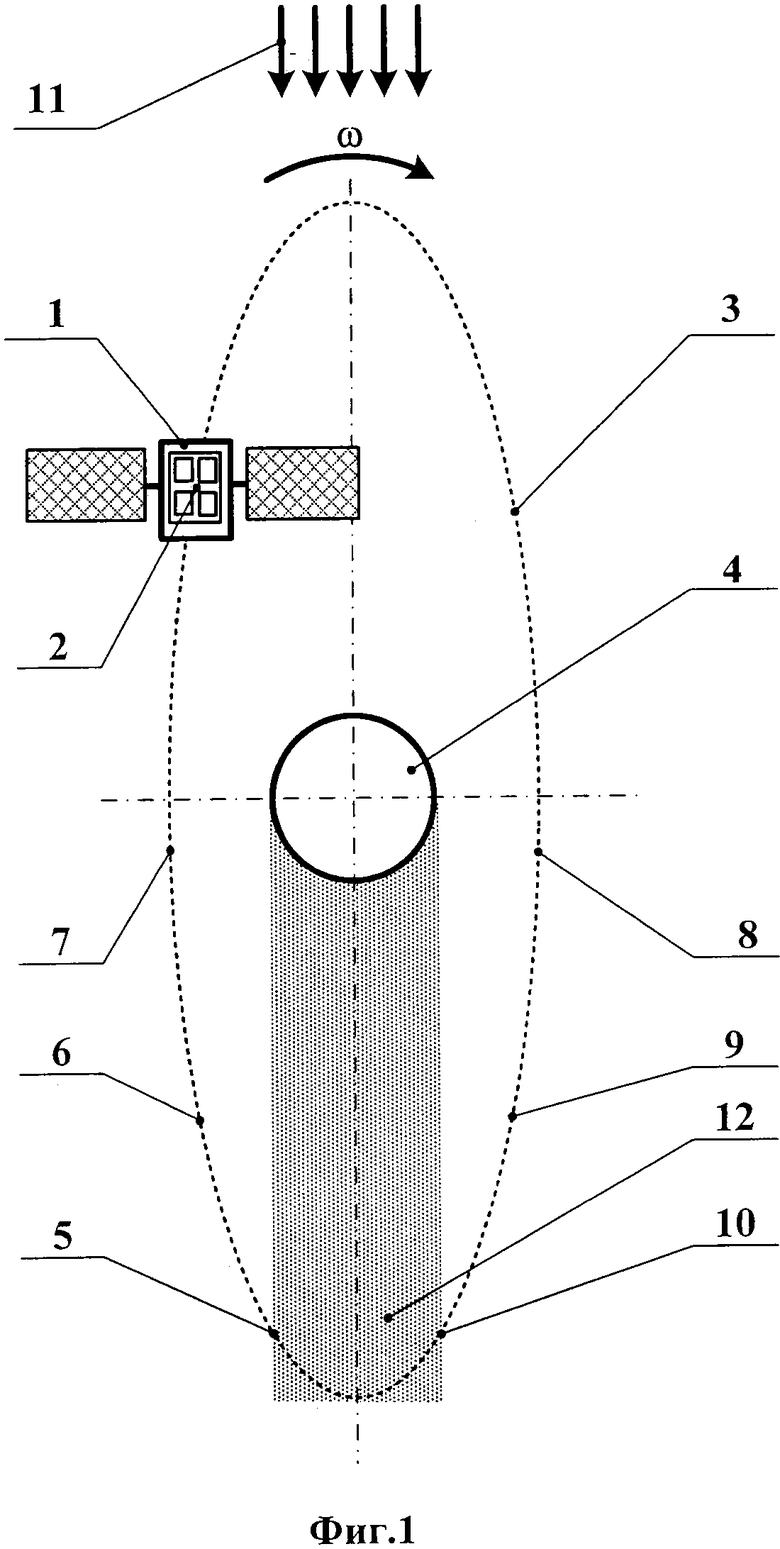
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температуры, заключающийся в том, что измеряют температуру в i-тых зонах радиационных панелей датчиками температур, где i=1, 2…n - номер зоны радиационной панели, поддерживают температуру в зонах радиационных панелей в пределах допустимого диапазона путем изменения температур посредством терморегуляторов, разбивают период оборота космического аппарата вокруг Земли на фиксированные интервалы времени, которые определяются ориентацией космического аппарата относительно Солнца и планет, отличающийся тем, что определяют по паспортным данным на установленные в зонах служебные системы допустимый диапазон температур, при котором обеспечивается их работоспособность, и максимально возможные рассогласования температур в местах установки первого, второго, третьего и четвертого датчиков температур в каждой i-той зоне, задают в середине допустимого диапазона температур для каждой i-той зоны поддерживаемый диапазон температур как:

при этом 
где T°imax, T°imin - соответственно, максимальная и минимальная граница допустимого диапазона температур i-той зоны;
T°iв, T°iн - верхняя и нижняя границы поддерживаемого диапазона температур i-той зоны;
Т°ip - максимально возможное рассогласование температуры в местах установки первого, второго, третьего и четвертого датчиков i-той зоны, определяют для каждой i-той зоны, минимальное время изменения температуры от нижней до верхней границы поддерживаемого диапазона температур, а также минимальное время увеличения температуры от нижнего до верхнего значения допустимого диапазона температур, разбивают каждый из фиксированных интервалов времени периода оборота космического аппарата вокруг Земли в каждой i-той зоне на локальные интервалы времени, в которых соблюдаются повторяющиеся на витках орбиты одинаковые температурные условия, обусловленные изменением режимов работы установленных на ней служебных систем, во время полета космического аппарата измеряют и передают в наземный комплекс управления значения температур i-той зоны, измеренной первым, вторым и третьим датчиками температур, задействованными в контуре управления, а также температуры, измеренной четвертым датчиком, не задействованным в указанном контуре, и ток, потребляемый терморегуляторами во время включения нагрева, задают в каждой i-той зоне допустимое время непрерывного сбоя каждого датчика температуры в диапазоне более минимального времени, при котором температура изменяется от нижней до верхней границы поддерживаемого диапазона температур, и менее минимального времени, при котором температура указанной зоны радиационной панели увеличивается от нижнего до верхнего значения допустимого диапазона температур, во время полета космического аппарата для автоматического поддержания температуры в i-той зоне используют результаты измерений первого, второго и третьего датчиков, задействованных в контуре управления, у которых отсутствуют соответствующие сигналы отказов, определяют температуру i-той зоны как среднюю арифметическую величину между измеренными значениями трех или двух датчиков температур, задействованных в контуре управления, если измеренные значения отличаются между собой на величину менее максимально допустимого рассогласования, определяют температуру i-той зоны как измеренное значение одного датчика температуры, если для него отсутствует, а для двух других датчиков имеются сигналы отказов, определяют температуру i-той зоны радиационной панели как среднее значение суммы максимальной, минимальной и удвоенного среднего значения температур, если максимальное и минимальное значения отличаются между собой на величину более максимально допустимого рассогласования и при этом среднее значение измеренной температуры отличается от каждого из двух других на величину, не превышающую указанного рассогласования, подсчитывают и запоминают количество включений нагрева терморегулятора, суммарное время нагрева для каждой i-той зоны на каждом локальном интервале, отсчитывают время контроля каждого датчика температуры, задействованного в контуре управления, если для него отсутствует сигнал отказа, при этом измеренное им значение температуры отличается от соответствующих измеренных значений двумя другими датчиками на величину, превышающую максимально допустимое рассогласование, прекращают отсчет времени контроля датчика температуры и сбрасывают его, если измеренное значение не превышает величину максимально допустимого рассогласования хотя бы с одним из измеренных значений других датчиков, задействованных в контуре управления, формируют сигнал отказа датчика температуры, задействованного в контуре управления, и прекращают отсчет соответствующего времени контроля, если оно превышает допустимое время непрерывного сбоя, формируют сигналы отказа для каждого из двух оставшихся датчиков температур, задействованных в контуре управления i-той зоны, если при наличии сигнала отказа одного из датчиков рассогласование между указанными значениями превышает величину максимально допустимого рассогласования в течение времени более допустимого времени непрерывного сбоя, при наличии сигналов отказов трех датчиков температур, задействованных в контуре управления i-той зоны, включают нагрев на каждом локальном интервале указанной зоны с периодом, равным отношению длительности данного интервала к соответствующему запомненному значению количества включений нагрева, с длительностью нагрева на каждом периоде, равном отношению соответствующего запомненного суммарного времени нагрева к количеству включений нагрева, снимают в i-той зоне из наземного комплекса управления сигналы отказов датчиков, если измеренные ими значения в течение времени не менее одного локального интервала отличаются от результатов измерения соответствующего четвертого датчика на величину, не превышающую максимально допустимого рассогласования, при этом направления изменения соответствующего тока нагрева соответствуют направлениям изменения температуры.
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННЫХ ПАНЕЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2310587C2 |
| СИСТЕМА ТЕРМОРЕГУЛИРОВАНИЯ | 1999 |
|
RU2168690C2 |
| JP 2003015746 A, 17.01.2003. | |||

