Предлагаемый способ управления ориентацией солнечной батареи (СБ) космического аппарата (КА) с контролем направления вращения и непрерывности изменения информации углового положения солнечной батареи относится к системам электроснабжения КА. Данный способ может быть применен для управления ориентацией СБ спутников, космических станций и других КА, функционирующих на орбите Земли.
Современные КА, решающие, например, задачи дистанционного зондирования Земли, коммуникаций, теле- и радиовещания должны функционировать на орбите Земли в течение нескольких лет, что накладывает повышенные требования к бесперебойному снабжению бортового оборудования, входящего в состав КА, электроэнергией. Как правило, электроснабжение бортового оборудования КА осуществляется при помощи СБ. Панель СБ и соответствующий датчик ее углового положения закрепляются на выходном валу электромеханического привода, входящего в состав устройства поворота СБ, которое управляется бортовой автоматической системой управления. В состав бортовой системы управления КА входят бортовые цифровые вычислительные машины, в которых реализуются алгоритмы, обеспечивающие управление ориентацией и системами КА, в том числе управление ориентацией СБ.
Как известно, величина тока, вырабатываемого СБ, зависит от ориентации плоскости ее рабочей поверхности относительно Солнца. Определение направления на Солнце относительно корпуса КА осуществляется помощи алгоритмов системы управления движением на основе информации, поступающей, например, от астродатчиков, либо солнечных датчиков. Алгоритмы управления ориентацией СБ определяют угловое положение СБ на основе информации, поступающей от датчика угла, осуществляют его сравнение с информацией о заданном направлении на Солнце. При наличии рассогласования между этими углами алгоритмы формируют команды на вращение СБ по кратчайшему пути в направлении его уменьшения, а при отсутствии рассогласования, команды на прекращение вращения СБ.
Во время полета по заданной орбите на КА оказывают влияние различные внешние факторы: излучение Солнца, космические излучения, перепады температур, микрометеориты и другие. Указанные факторы могут приводить к сбоям и отказам функционирования его бортового оборудования. Из-за геомагнитных явлений в магнитосфере Земли на поверхностях блоков бортового оборудования в их различных точках могут накапливаться электростатические заряды, имеющие различные потенциалы. Причинами их накопления могут быть инжекция электронов и протонов космической плазмы, ионизирующие космические излучения, энергия падающих частиц, вторичная эмиссия электронов и другие факторы. После накопления критической разности потенциалов происходит электростатический разряд, который представляет собой электрический пробой. Во время указанного разряда возникает сигнал помехи, который может искажать информацию, передаваемую от датчиков углового положения СБ, через бортовую кабельную сеть в бортовую цифровую вычислительную машину системы управления КА. Указанные сбои носят, как правило, кратковременный характер, при этом они могут приводить к скачкообразным изменениям информации об угловом положении СБ, то есть нарушениям ее непрерывности. Характер накопления электростатического заряда имеет сложную природу. Для снижения эффектов электризации используют различные способы, при этом конструктивных решений по защите бортового оборудования от электростатического разряда, как правило, недостаточно. Таким образом, для исключения приема ложной информации в бортовую автоматическую систему управления от датчиков углового положения СБ при появлении подобных помех требуется обеспечивать также и алгоритмическую защиту. Кроме указанных причин нарушение информации, поступающей от датчика углового положения СБ, может быть также обусловлено отказами части его измерительных элементов, либо обрывами в цепях бортовой кабельной сети КА.
В процессе выведения КА на заданную орбиту на него действуют вибрация, резкие перегрузки и другие внешние воздействия. В результате воздействия указанных факторов могут возникать отказы в системе управления КА, устройстве поворота СБ, включая электромеханический привод. Кроме того, возможны обрывы, короткие замыкания в цепях, обеспечивающих передачу сигналов положения и команд управления СБ. При наземных отработках системы управления КА и системы ориентации СБ на стендах с задействованием реального оборудования возможны отказы, связанные с неправильной работой программного обеспечения или аппаратуры. Данные отказы могут быть обусловлены, например, неправильной работой, например, драйверов, обеспечивающих взаимодействие с аппаратурой ориентации СБ, или ошибками, допущенными в процессе разработки электронных блоков или в жгутах связи между блоками бортового оборудования КА. При отработках на наземных стендах возможны также ошибки, связанные с неправильным соединением блоков бортового оборудования КА. Перечисленные отказы и ошибки могут приводить в том числе к нарушению правильного исполнения команд на вращение СБ.
Наиболее близким техническим решением, принятым за прототип, является способ управления положением СБ, сущность которого заключается в том, что определяют угловую скорость СБ, затем по времени пересечения СБ границы между дискретными секторами датчика угла вычисляют расчетный угол относительно измеренного углового положения СБ. Данный угол вычисляют как произведение угловой скорости СБ на время ее вращения. Вращают СБ в направлении уменьшения рассогласования между заданным и расчетным углами. По соответствующим углам отклонения нормали к рабочей поверхности СБ определяют углы разгона и торможения СБ. Корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения показаний датчика угла на величину одного дискретного сектора. По углам разгона и торможения, а также по минимально допустимому и максимально возможному токам, вырабатываемым СБ, задают порог срабатывания. При превышении этого порога формируется рассогласование между заданным и расчетным углами СБ. Задают также порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами СБ. Вращение СБ прекращают, если рассогласование между заданным и расчетным углами начинает увеличиваться, но не превышает порога срабатывания [1].
Недостатком указанного способа является то, что возможные нарушения непрерывности изменения информации, поступающей от датчика угла СБ, либо несоответствия фактического направления вращения СБ выданной команде приводят к неправильной ориентации СБ относительно направления на Солнце. Следствием этого является снижение тока, вырабатываемого СБ, что в конечном итоге приводит к снижению живучести КА и к нарушению выполняемых КА задач.
Технической задачей предлагаемого способа является расширение функциональных возможностей, повышение живучести и эффективности системы управления ориентацией СБ за счет обеспечения контроля направления вращения СБ и исключения приема сбойной информации, не соответствующей реальному угловому положению СБ.
Указанный технический результат достигается тем, что в известном способе управления ориентацией солнечной батареи космического аппарата, заключающемся в том, что определяют заданный угол солнечной батареи как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют текущий угол солнечной батареи как угловое положение нормали к рабочей поверхности солнечной батареи в плоскости ее вращения с точностью до дискретного сектора датчика угла, определяют угловую скорость солнечной батареи, вычисляют расчетный угол как произведение угловой скорости солнечной батареи на время ее вращения, вращают солнечную батарею в направлении уменьшения рассогласования между заданным и расчетным углами, определяют угол разгона солнечной батареи как угол отклонения нормали к рабочей поверхности солнечной батареи относительно указанных осей координат с момента начала вращения солнечной батареи при рассогласовании до достижения ею установившейся угловой скорости, определяют угол торможения солнечной батареи как угол отклонения нормали с момента прекращения рассогласования до момента окончания вращения, корректируют расчетный угол солнечной батареи в моменты изменения измеренных угловых положений нормали на величину одного дискретного сектора, определяют максимально допустимый угол αMAX, на который может отклоняться солнечная батарея, как:
где IMIN - минимально допустимый ток, вырабатываемый солнечной батареей;
IMAX - максимально возможный ток, вырабатываемый солнечной батареей,
задают порог срабатывания αCP, при превышении которого формируется рассогласование между заданным и расчетными углами, как:
(αРАЗГ+αТОРМ)<αCP<αMAX,
где αРАЗГ, αТОРМ - соответственно углы разгона и торможения солнечной батареи,
задают порог отпускания αОТП, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, как αОТП≈αТОРМ, прекращают вращение солнечной батареи при достижении порога отпускания, дополнительно определяют время разгона и время торможения солнечной батареи, соответствующие углам разгона и торможения, разбивают круг датчика угла на равные дискретные сектора величиной:
(αРАЗБ+αТОРМ)<σ<αCP,
где σ - угловая величина одного дискретного сектора датчика угла, задают пороговую величину времени контроля непрерывности изменения информации углового положения солнечной батареи в диапазоне:
где TПКНУ - пороговая величина времени контроля непрерывности изменения информации углового положения солнечной батареи;
ωСБ - установившаяся угловая скорость солнечной батареи,
задают пороговую величину времени контроля направления вращения солнечной батареи в диапазоне:

где TПКНВ - пороговая величина времени контроля направления вращения солнечной батареи;
tРАЗГ, tТОРМ - время разгона и время торможения солнечной батареи, перед началом управления ориентацией солнечной батареи присваивают расчетному углу значение измеренного угла и запоминают измеренный угол, во время вращения солнечной батареи отсчитывают время контроля непрерывности, если текущий измеренный угол отличается от запомненного угла более, чем на один дискретный сектор, прекращают отсчет времени контроля непрерывности и обнуляют его, если текущий измеренный угол отличается от запомненного угла не более, чем на один сектор, при нулевом значении времени контроля непрерывности отсчитывают время контроля направления вращения, если знак рассогласования между текущим измеренным и запомненным углами не соответствует заданному направлению вращения солнечной батареи, прекращают отсчет времени контроля вращения и обнуляют его, если знак рассогласования между текущим измеренным и запомненным углами соответствует заданному направлению вращения солнечной батареи, если текущий измеренный угол изменяется на один дискретный сектор и знак рассогласования между текущим измеренным и запомненным углами соответствует заданному направлению вращения солнечной батареи, то в момент изменения текущего измеренного угла задают расчетному углу значение границы между указанными дискретными секторами, и при этом присваивают запомненному углу новое значение измеренного угла, формируют сигнал отказа и прекращают управление солнечной батареей, если время контроля непрерывности или время контроля направления вращения превышает соответствующую пороговую величину.
На фиг.1 представлен круг вращение СБ, разбитый на дискретные сектора, на фиг.2 представлена циклограмма контроля непрерывности изменения измеренного углового положения СБ, на фиг.3 - циклограмма контроля направления вращения СБ.
Способ управления ориентацией солнечной батареи космического аппарата с контролем направления вращения и непрерывности изменения информации углового положения солнечной батареи реализуется следующим образом.
На этапе проектирования и наземной подготовки по паспортным данным, а также по результатам экспериментов определяют угловую скорость СБ как угловую скорость вращения выходного вала электромеханического привода устройства поворота СБ. Кроме того, определяют время и угол разгона СБ как отклонение нормали к рабочей поверхности СБ относительно связанных с КА осей координат с момента начала вращения СБ при наличии рассогласования между заданным и расчетным углами до достижения ею установившейся угловой скорости. Затем определяют время и угол торможения СБ как угол отклонения нормали с момента прекращения рассогласования до момента окончания вращения.
Далее определяют максимально допустимое отклонение углового положения нормали к рабочей поверхности СБ от направления на Солнце (αMAX) как
где αMAX - максимально допустимое отклонение углового положения нормали к рабочей поверхности СБ от направления на Солнце;
IMIN - задаваемый минимально допустимый ток, вырабатываемый СБ для питания бортовой аппаратуры космического аппарата;
IMAX - максимально возможный ток, вырабатываемый при совпадении нормали к рабочей поверхности СБ и проекции единичного вектора направления на Солнце на плоскость ее вращения.
Порог срабатывания, при превышении которого формируется рассогласование между заданным и расчетными углами, задают как:

где αCP - порог срабатывания солнечной батареи;
αРАЗГ, αТОРМ - соответственно углы разгона и торможения СБ.
Задают порог отпускания αОТП, менее которого прекращается рассогласование между заданным и расчетным углами СБ, принимают угол отпускания приблизительно равным углу торможения, то есть: αОТП≈αТОРМ.
Для измерения углового положения нормали к рабочей поверхности
СБ относительно указанных осей координат используют датчик угла, разбитый на одинаковые дискретные угловые сектора величиной:

где σ - угловая величина дискретного сектора датчика угла.
Датчик угла формирует угловые значения, соответствующие угловым положениям биссектрис дискретных секторов.
Для контроля функционирования СБ используют время контроля непрерывности изменения значений датчика угла и время контроля направления вращения СБ.
Для контроля непрерывности задают пороговую величину времени контроля непрерывности в диапазоне:
где TПКНУ - пороговая величина времени контроля непрерывности изменения информации углового положения СБ;
ωСБ - установившаяся угловая скорость СБ.
Для контроля направления вращения задают пороговую величину времени контроля направления вращения, в диапазоне:

где TПКНВ - пороговая величина времени контроля направления вращения СБ;
tРАЗГ, tТОРМ - время разгона и время торможения СБ;
σ - угловая величина одного дискретного сектора датчика угла.
Перед началом управления СБ расчетному углу присваивают значение измеренного угла и запоминают текущий измеренный угол, при этом обнуляют время контроля непрерывности, время контроля направления вращения и сигнал отказа управления СБ, то есть:

где αP - расчетный угол СБ;
αИЗМi - измеренный угол СБ, соответствующий i-номеру дискретного сектора, при этом, 0≤i≤n-1, где n - количество дискретных секторов датчика угла;
αЗАП - запомненный угол;
tКНУ - время контроля непрерывности изменения значений датчика угла;
tКНВ - время контроля направления вращения СБ;
UОТК - сигнал отказа управления СБ.
На основе информации, формируемой астродатчиками или датчиками положения Солнца при помощи алгоритмов системы управления движением, определяют заданный угол СБ как угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ относительно связанных с КА осей координат.
Во время вращения СБ до момента окончания торможения измеряют угловое положение нормали к рабочей поверхности СБ относительно связанных с КА осей координат в плоскости ее вращения с точностью до дискретного углового сектора датчика угла.
При достижении величины рассогласования между заданным и расчетным углами более порога срабатывания, то есть при:

где αЗАД - заданный угол СБ;
αP - расчетный угол СБ;
αCP - угол срабатывания СБ,
выдают команду на начало вращения СБ в направлении уменьшения указанного рассогласования.
При достижении величины рассогласования между заданным и расчетным углами, равной углу отпускания, выдают команду на прекращение вращения СБ, то есть при:

где αОТП - угол отпускания СБ.
Контроль непрерывности изменения значений датчика угла осуществляют следующим образом. Если во время вращения СБ текущий измеренный угол отличается от запомненного угла на величину более одного дискретного сектора, то есть при |αЗАП-αИЗМi|>σ, отсчитывают время контроля непрерывности. При этом если время контроля непрерывности превышает пороговую величину, формируют сигнал отказа и прекращают управление СБ, то есть: если tКНУ>TПКНУ, то UОТК=1.
Прекращают отсчет времени контроля непрерывности, если измеренный и запомненный углы равны, либо измеренный угол отличается от запомненного на величину одного дискретного сектора, то есть tКНУ=0, при |αЗАП-αИЗМi|≤σ.
При нулевом значении времени контроля непрерывности, то есть при tКНУ=0 осуществляют контроль направления вращения СБ следующим образом.
При изменении заданного угла в сторону увеличения относительно связанных с КА осей координат, вращение СБ должно осуществляться путем периодического формирования команды «Вперед», при этом вращение СБ осуществляется в направлении увеличения углового положения СБ от нулевого сектора i=0 до последнего сектора i=(n-1). Значение измеренного угла, при вращении вперед, должно изменяться при этом в направлении увеличения угла, что соответствует в момент изменения измеренного угла положительному знаку рассогласования между измеренным и запомненным углами, то есть:

При изменении заданного угла в сторону уменьшения относительно связанных с КА осей координат вращение СБ должно осуществляться путем периодического формирования команды «Назад», в направлении уменьшения углового положения СБ от последнего сектора i=(n-1) до нулевого сектора i=0. Значение измеренного угла при этом должно изменяться в направлении уменьшения угла, что соответствует в момент изменения измеренного угла отрицательному знаку рассогласования между измеренным и запомненным углами, то есть:

Если во время вращения СБ текущий измеренный угол отличается от запомненного угла, то есть αЗАП≠αИЗМi, и при этом знак рассогласования между этими углами не соответствует заданному направлению вращения, то есть условие (9) или (10) не выполняется, то отсчитывают время контроля направления вращения. Формируют сигнал отказа и прекращают управление СБ, если значение времени контроля направления вращения превышает пороговую величину, то есть:
UОТК=1, при tКНВ>TПКНВ
где tКНВ - время контроля направления вращения.
Если время контроля непрерывности имеет нулевое значение и направление изменения измеренного угла, определенное по условием (9) или (10), соответствует направлению выданной команды, то в момент изменения текущего измеренного угла прекращают отсчет и обнуляют время контроля направления вращения, то есть tКНВ=0, при этом присваивают запомненному углу новое, изменившееся на один дискретный сектор значение текущего измеренного угла, то есть при вращении вперед:

где αИЗМi+1 - угловое значение биссектрисы (i+1)-го дискретного сектора датчика угла, где при этом 0≤i≤n-1, где n - количество дискретных секторов датчика угла СБ.
При вращении назад:

где αИЗМi-1 - угловое значение биссектрисы (i-1)-го дискретного сектора датчика угла.
Одновременно осуществляют коррекцию расчетного угла по угловому положению границы между дискретными угловыми секторами, при этом указанная граница, например, при вращении СБ в направлении увеличения угла, вычисляется как:

где αИЗМГi+1 - угловое значение i+1-й границы между дискретными секторами датчика угла.
При вращении СБ в направлении уменьшения угла указанная выше граница вычисляется как:

αИЗМi-1 - угловое значение биссектрисы (i-1)-го дискретного сектора датчика угла.
Во время вращения СБ, в случае соблюдения условий коррекции, от момента пересечения нормалью границы между соседними дискретными секторами датчика угла, вычисляют расчетный угол относительно указанной границы с учетом знака, соответствующего направлению вращения, например, при вращении в направлении увеличения угла, как:

где ∆t - время вращения СБ после пересечения границы между дискретными секторами.
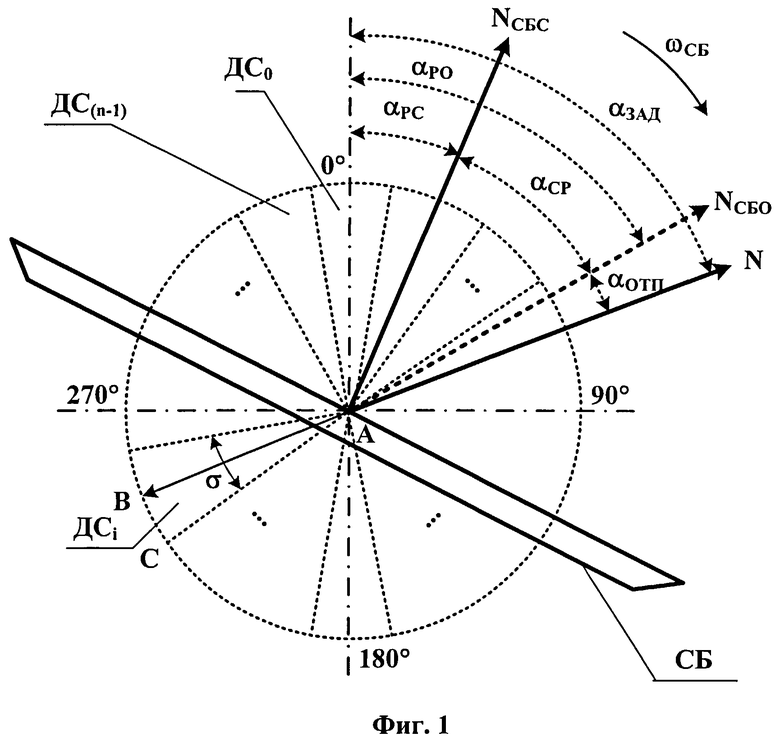
На фиг.1 представлен круг вращения солнечной батареи, разбитый на дискретные сектора, где:
СБ - солнечная батарея;
А - центр круга вращения нормали к рабочей поверхности СБ;
ДС0, ДСi-1, ДСi, ДС(n-1) - дискретные сектора датчика угла;
i - номер дискретного сектора, 0≤i≤n-1;
n - количество дискретных секторов;
σ - угловая величина дискретного сектора датчика угла СБ;
АВ - биссектриса i-го дискретного сектора ДСi;
αCP - угол срабатывания СБ;
NСБС - положения нормали к рабочей поверхности СБ в момент достижения угла срабатывания;
αCP - расчетный угол СБ в момент достижения рассогласования между заданным направлением и нормалью угла срабатывания;
N - положения проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
αЗАД - заданный угол СБ;
ωСБ - направление угловой скорости СБ;
αОТП - угол отпускания СБ;
NСБО - положения нормали к рабочей поверхности СБ в момент достижения угла отпускания;
αPO - расчетный угол СБ в момент достижения рассогласования между заданным направлением и нормалью, равного углу отпускания;
αИЗМГi - угловое значение границы между секторами ДСi-1 и ДСi;
АС - граница (i-1)-го и i-го дискретного сектора датчика угла.
На фиг.1 показан круг, по которому вращается СБ вокруг центра А. Круг разбит на равные дискретные сектора ДС0, …, ДСi-1, ДСi, … ДС(n-1), величиной σ, причем датчик угла СБ формирует значения, соответствующие положениям биссектрис каждого из дискретных секторов, аналогично биссектрисы АВ дискретного сектора ДСi. При достижении угла срабатывания αCP между угловыми положением нормали NСБС к рабочей поверхности СБ, соответствующей расчетному углу αPC, и положением проекции N с угловым положением αЗАД начинается вращение СБ с угловой скоростью ωСБ. В момент достижения угла отпускания αОПТ положение нормали NСБО соответствует углу αPO. Корректировка расчетного угла осуществляется в момент пересечения нормалью границы между дискретными секторами датчика угла. Например, при пересечении нормалью границы АС между дискретными секторами ДСi-1 и ДСi расчетному углу присваивается угловое значение границы между этими секторами αИЗМГi, вычисляемое по уравнениям (4) и (5).
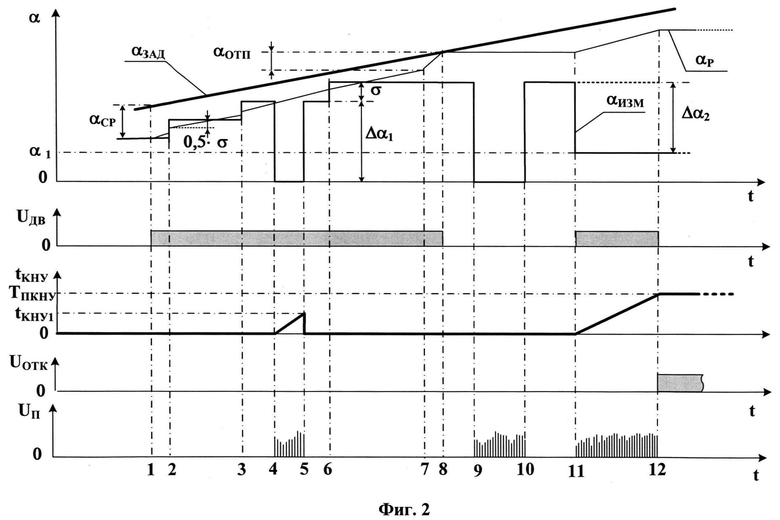
На фиг.2 представлена циклограмма контроля непрерывности изменения измеренного углового положения СБ, где:
αЗАД - заданный угол СБ;
αИЗМ - измеренный угол СБ;
αP - расчетный угол СБ;
αCP - угол срабатывания;
αОТП - угол отпускания;
σ - дискретный сектор датчика угла;
α1 - первое значение измеренного угла СБ;
∆α1, ∆α2 - изменения значений измеренных углов СБ при сбоях датчика угла;
UДВ - сигнал наличия вращения или торможения СБ;
tКНУ - время контроля непрерывности изменения информации углового положения СБ;
tКНУ1 - время контроля непрерывности на момент обнуления;
TПКНУ - пороговое значение времени контроля непрерывности;
UОТК - сигнал отказа;
UП - сигнал помехи, вызывающей сбой измеренного угла;
1, 11 - моменты начала вращения СБ;
7 - момент начала торможения СБ;
8 - момент окончания торможения СБ;
2, 3, 6 - моменты корректировки расчетного угла СБ;
4-5, 9-10, 11-12 - диапазоны времени сбоя датчика угла;
12 - момент формирования сигнала отказа.
На представленной на фиг.2 циклограмме контроля непрерывности изменения измеренного углового положения СБ в момент времени 1, при достижении угла рассогласовании между заданным αЗАД и расчетным αP углами более порога срабатывания αCP, начинается вращение СБ в направлении уменьшения рассогласования, при этом формируется сигнал наличия движения UДВ=1. В моменты 2 и 3 изменения измеренного угла αИЗМ на величину одного дискретного сектора датчика угла σ осуществляется коррекция расчетного угла αP по границе измеренного угла, то есть αP=αИЗМГi, при этом граница между дискретными секторами, в зависимости от направления вращения СБ, вычисляется по уравнениям (13) или (14). В диапазоне времени от момента 4 до момента 5 формируется сигнал помехи, вызывающий сбой измеренного угла UП>0, при этом измеренный угол αИЗМ=0°, то есть изменяется на величину более одного дискретного сектора датчика угла по отношению к значению на момент 4, то есть ∆α1>σ. Начиная с момента 4 до момента 5, формируется сигнал помехи, вызывающий сбой датчика угла, при этом время контроля непрерывности tКНУ во время сбоя увеличивается со значения tКН=0 до значения tКНУ=tКНУ1. В момент 5 сбой датчика угла прекращается, при этом время контроля непрерывности не изменяется. В момент 6 производится корректировка расчетного угла αP, время контроля непрерывности обнуляется, то есть tКН=0, так как измеренное значение датчика угла изменяется на величину одного дискретного углового сектора датчика угла. В момент 7 рассогласование между заданным αЗАД и расчетным αP углами достигает величины угла отпускания αОТП, при этом начинается торможение СБ, которое заканчивается в момент 8. Начиная с момента 8 до момента 11, рассогласование между расчетным αP и заданным αЗАД углами менее порога срабатывания αCP, при этом вращение СБ отсутствует. На интервале 9-10 сбойные значение датчика угла αИЗМ=0 игнорируются, так как вращение СБ отсутствует. В момент 11, при достижении рассогласования между расчетным αP и заданным αЗАД углами более порога срабатывания αCP, начинается вращение СБ. Начиная с момента 11 до момента 12, формируется сигнал помехи, при этом значение измеренного угла изменяется на величину ∆α2 и принимает значение α1, при этом значения расчетного угла αP не изменяется. С момента 11 до момента 12 значение времени контроля непрерывности tКНУ увеличивается со значения tКН=0 до порогового значения tКНУ=TПКНУ. При превышении временем контроля непрерывности tКНУ порогового значения в момент 12, формируется сигнал отказа UОТК=1 и управление СБ прекращается.
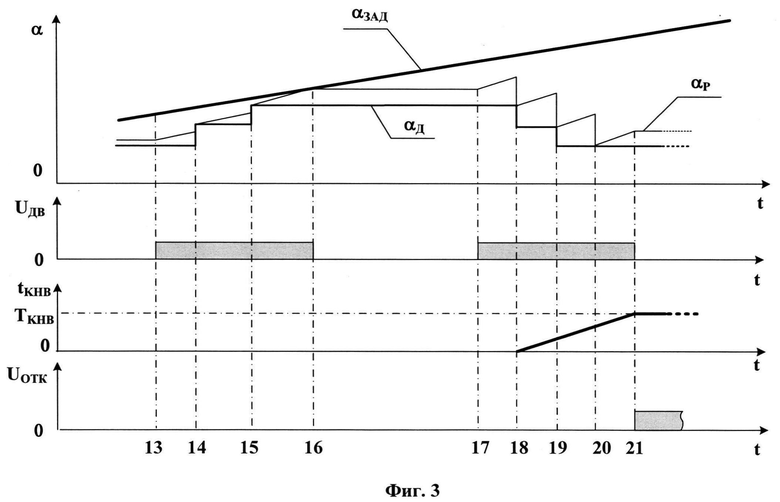
На фиг.3 представлена циклограмма контроля направления вращения СБ, где:
αЗАД - заданный угол СБ;
αИЗМ - измеренный угол СБ;
αP - расчетный угол СБ;
UДВ - сигнал наличия вращения или торможения СБ;
tКНВ - время контроля направления вращения;
TПКНВ - пороговое значение времени контроля направления вращения;
UОТК - сигнал отказа;
13, 17 - моменты начала вращения СБ;
16 - момент окончания вращения и торможения СБ;
14, 15, 18, 19, 20 - моменты корректировки расчетного угла СБ;
21- момент формирования сигнала отказа.
На представленной на фиг.3 циклограмме контроля направления вращения СБ в момент 13 при превышении угла рассогласования между заданным αЗАД и расчетным αP углами более порога срабатывания αCP, СБ начинает вращение в направлении уменьшения рассогласования, при этом формируется сигнал наличия движения UДВ=1. В моменты 14, 15 осуществляется корректировка расчетного угла αP по границе измеренного угла, то есть αP=αИЗМГi. В момент 16 после окончания торможения вращение СБ прекращается. Начиная с момента 17, формируется команда на вращение СБ в направлении уменьшения рассогласования между заданным αЗАД и расчетным αP углами, при этом также формируется сигнал наличия движения UДВ=1. В моменты 18, 19, 20 осуществляется корректировка расчетного угла по измеренному углу, при этом направление изменения измеренного угла αИЗМ не совпадает с направлением выданной команды на вращение и, соответственно, с направлением изменения расчетного угла αP. Начиная с момента 18, значение времени контроля направления вращения tКНВ увеличивается со значения tКНВ=0 до порогового значения tКНВ=TПКНВ в момент 21. При этом в момент 21 происходит превышение временем контроля направления вращения tКНВ порогового значения TПКНВ, в результате чего формируется сигнал отказа UОТК=1 и управление СБ прекращается.
Предлагаемый способ позволяет повысить живучесть и эффективность функционирования СБ за счет своевременного обнаружения сбоев и отказов системы управления ориентацией СБ, связанных с пропусками или получением ложной информации от датчика угла, а также отказов, связанных с нарушением исполнения команд на вращение СБ. Своевременное обнаружение отказа системы управления ориентацией СБ позволяет предотвратить нарушение электроснабжения бортового оборудования от СБ. Отказ по непрерывности изменения информации углового положения СБ может быть парирован путем перехода, например, на резервные датчики углового положения СБ, основанные на других физических принципах работы. Отказ, связанный с нарушением направления вращения СБ, может быть парирован, например, путем перехода на резервные команды управления СБ.
Источники информации
1. Патент РФ 2356788, В64С 1/00, 28.12.2007 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ЗАЩИТОЙ ОТ КРАТКОВРЕМЕННЫХ СБОЕВ ИНФОРМАЦИИ ОБ УГЛОВОМ ПОЛОЖЕНИИ СОЛНЕЧНОЙ БАТАРЕИ | 2012 |
|
RU2509692C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2356788C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ОГРАНИЧЕНИЕМ УГЛА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2012 |
|
RU2509694C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И СОЛНЕЧНОЙ БАТАРЕИ ПРИ ОТКАЗЕ УСТРОЙСТВА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2581106C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА ПРИ ЧАСТИЧНЫХ ОТКАЗАХ ДАТЧИКА УГЛА | 2011 |
|
RU2465180C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368545C1 |
| СПОСОБ ОРИЕНТАЦИИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА ПО ТОКУ | 2011 |
|
RU2465179C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2368547C1 |
| Способ управления системой ориентации солнечных батарей космического аппарата при съемке Земли | 2024 |
|
RU2839334C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА ПО ВЫРАБАТЫВАЕМОМУ ТОКУ | 2014 |
|
RU2578416C1 |
Изобретение относится к системам электроснабжения космического аппарата (КА) с помощью солнечных батарей (СБ). Способ включает определение заданного и текущего углов ориентации СБ и угловой скорости (ωСБ) СБ. Вычисляют также расчетный угол и перед началом управления СБ присваивают ему значение измеренного угла, который запоминают. Вращают СБ в направлении уменьшения рассогласования между заданным и расчетным углами. Определяют времена и углы разгона (tРАЗГ, αРАЗГ) и торможения (tТОРМ, αТОРМ) СБ, а также максимально допустимый угол (αMAX) отклонения СБ, исходя из минимально допустимого и максимально возможного токов СБ. По этим углам задают порог срабатывания (αCP), при превышении которого формируют указанное рассогласование. Последнее не учитывают ниже порога отпускания (αОТП), по достижении которого вращение СБ прекращают. Расчетный угол СБ корректируют в пределах одного дискретного сектора (ДС) круга вращения СБ. Величина ДС зависит от углов αРАЗГ, αТОРМ и αCР. В зависимости от αCP и ωСБ задают пороговую величину времени контроля непрерывности изменения информации об угловом положении СБ. Отсчет этого времени контроля проводят, если текущий измеренный угол отличается от запомненного более, чем на один ДС, и прекращают в противном случае. Задают пороговую величину времени контроля направления вращения СБ в зависимости от tРАЗГ, tТОРМ, αMAX, ωСБ и величины ДС. Это время отсчитывают при нулевом времени контроля непрерывности, если знак рассогласования между измеренным и запомненным углами СБ не отвечает заданному направлению вращения СБ. В противном случае отсчет прекращают и обнуляют время контроля направления вращения. При этом в момент изменения текущего измеренного угла на один ДС задают расчетному углу значение границы между ДС и присваивают запомненному углу новое значение измеренного угла. Если время контроля непрерывности или время контроля направления вращения превышает свою пороговую величину, то формируют сигнал отказа и прекращают управление СБ. Техническим результатом изобретения является повышение живучести и эффективности системы управления ориентацией СБ. 3 ил.
Способ управления ориентацией солнечной батареи космического аппарата с контролем направления вращения и непрерывности изменения информации углового положения солнечной батареи, заключающийся в том, что определяют заданный угол солнечной батареи как угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют текущий угол солнечной батареи как угловое положение нормали к рабочей поверхности солнечной батареи в плоскости ее вращения с точностью до дискретного сектора датчика угла, определяют угловую скорость солнечной батареи, вычисляют расчетный угол как произведение угловой скорости солнечной батареи на время ее вращения, вращают солнечную батарею в направлении уменьшения рассогласования между заданным и расчетным углами, определяют угол разгона солнечной батареи как угол отклонения нормали к рабочей поверхности солнечной батареи относительно указанных осей координат с момента начала вращения солнечной батареи при рассогласовании до достижения ею установившейся угловой скорости, определяют угол торможения солнечной батареи как угол отклонения указанной нормали с момента прекращения рассогласования до момента окончания вращения, корректируют расчетный угол солнечной батареи в моменты изменения измеренных угловых положений нормали на величину одного дискретного сектора, определяют максимально допустимый угол αMAX, на который может отклоняться солнечная батарея:
где IMIN - минимально допустимый ток, вырабатываемый солнечной батареей;
IMAX - максимально возможный ток, вырабатываемый солнечной батареей,
задают порог срабатывания αCP, при превышении которого формируется рассогласование между заданным и расчетными углами:
(αРАЗГ + αТОРМ)< αCP < αMAX,
где αРАЗГ, αТОРМ - соответственно углы разгона и торможения солнечной батареи,
задают порог отпускания αОТП, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи: αОТП ≈ αТОРМ, прекращают вращение солнечной батареи при достижении порога отпускания, отличающийся тем, что определяют время разгона и время торможения солнечной батареи, соответствующие углам разгона и торможения, разбивают круг датчика угла на равные дискретные сектора величиной:
(αРАЗГ + αТОРМ)<σ<αCP,
где σ - угловая величина одного дискретного сектора датчика угла, задают пороговую величину времени контроля непрерывности изменения информации углового положения солнечной батареи в диапазоне:
где TПКНУ - пороговая величина времени контроля непрерывности изменения информации углового положения солнечной батареи;
ωСБ - установившаяся угловая скорость солнечной батареи,
задают пороговую величину времени контроля направления вращения солнечной батареи в диапазоне:
где TПКНВ - пороговая величина времени контроля направления вращения солнечной батареи;
tРАЗГ, tТОРМ - время разгона и время торможения солнечной батареи, перед началом управления ориентацией солнечной батареи присваивают расчетному углу значение измеренного угла и запоминают измеренный угол, во время вращения солнечной батареи отсчитывают время контроля непрерывности, если текущий измеренный угол отличается от запомненного угла более, чем на один дискретный сектор, прекращают отсчет времени контроля непрерывности и обнуляют его, если текущий измеренный угол отличается от запомненного угла не более, чем на один сектор, при нулевом значении времени контроля непрерывности отсчитывают время контроля направления вращения, если знак рассогласования между текущим измеренным и запомненным углами не соответствует заданному направлению вращения солнечной батареи, прекращают отсчет времени контроля вращения и обнуляют его, если знак рассогласования между текущим измеренным и запомненным углами соответствует заданному направлению вращения солнечной батареи, если текущий измеренный угол изменяется на один дискретный сектор и знак рассогласования между текущим измеренным и запомненным углами соответствует заданному направлению вращения солнечной батареи, то в момент изменения текущего измеренного угла задают расчетному углу значение границы между указанными дискретными секторами, и при этом присваивают запомненному углу новое значение измеренного угла, формируют сигнал отказа и прекращают управление солнечной батареей, если время контроля непрерывности или время контроля направления вращения превышает соответствующую пороговую величину.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2356788C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 А, 08.05.2001 | |||
| US 5653407 А, 05.08.1997 | |||
| US 5257759 А, 02.11.1993. | |||

