Предлагаемая система относится к области технических средств регистрации и контроля рейсов подвижных объектов и может быть использована для учета эффективности применения транспортных средств при автоматическом учете отгрузки продукции в торговле или учете приемки сырья, отгрузки продукции в сельском хозяйстве, при перевозке твердых бытовых отходов и сыпучих грузов.
Известны системы и устройства регистрации и контроля подвижных объектов (авт. свид. СССР №№215.536, 318.971, 477.330, 498.636, 696.508, 769581, 830.447, 1.123.041, патенты РФ №№2.100.843, 2.184.992, 2.225.642, 2.234.735, 2.243.592; патент Франции №2.658.341; патенты ЕР №№0.249.487, 0.989.525 и др.).
Из известных систем и устройств наиболее близким к предлагаемым является устройство для учета рейсов автосамосвалов (патент РФ №2.234.735, G07C 5/08, 2002), которое и выбрано в качестве прототипа.
Известное устройство обеспечивает повышение помехозащищенности и избирательности панорамного приемника путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам.
Технической задачей изобретения является расширение функциональных возможностей системы путем контроля за выполнением графика заданного маршрута движения.
Поставленная задача решается тем, что система регистрации и контроля рейсов подвижных объектов, содержащая, в соответствии с ближайшим аналогом, на каждом контролируемом подвижном объекте последовательно включенные датчик давления, элемент И, второй вход которого соединен с выходом датчика положения кузова, блок кодирования, второй и третий входы которого соединены с выходами датчика расхода топлива и датчика пройденного пути соответственно, фазовый манипулятор, второй вход которого соединен с первым выходом генератора высокой частоты, и усилитель мощности, а на пункте контроля последовательно включенные приемную антенну, усилитель высокой частоты, первый смеситель, второй вход которого через первый гетеродин соединен с выходом блока поиска, первый усилитель промежуточной частоты, второй ключ, первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом второго ключа, фильтр нижних частот и дешифратор, к выходам которого подключены по числу контролируемых подвижных объектов исполнительные блоки, каждый из которых состоит из последовательно подключенных к дешифратору элемента запрета, блока регистрации и формирователя длительности импульсов, выход которого соединен с запрещающим входом элемента запрета, последовательно подключенные к выходу усилителя высокой частоты второй смеситель, второй вход которого через второй гетеродин соединен с выходом блока поиска, второй усилитель промежуточной частоты, коррелятор, второй вход которого соединен с выходом первого усилителя промежуточной высоты, и пороговый блок, выход которого соединен с вторым входом второго ключа, последовательно подключенные к второму входу первого гетеродина первый ключ, второй вход которого через амплитудный детектор соединен с выходом второго ключа, частотомер и дополнительный блок регистрации, второй, третий и четвертый входы которого соединены непосредственно и через счетчик расхода топлива и счетчик пройденного пути с соответствующими выходами дешифратора, при этом частоты гетеродинов разнесены на удвоенное значение промежуточной частоты
fГ2-fГ1=2fпр,
выбраны симметричными относительно несущей частоты основного канала
f1-fГ1=fГ2-f1=fпр
и перестраиваются синхронно, отличается от ближайшего аналога тем, что она снабжена радиочастотными метками, устанавливаемыми в контрольных точках по маршруту движения подвижного объекта, который снабжен приемопередающей антенной, циркулятором, усилителем высокой частоты, фазовым детектором, сумматором, формирователем кода и таймером, причем к выходу усилителя мощности последовательно подключены циркулятор, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты, фазовый детектор, второй вход которого соединен со вторым выходом генератора высокой частоты, и сумматор, второй вход которого через формирователь кода соединен с выходом таймера, а выход подключен к четвертому входу блока кодирования, каждая радиочастотная метка выполнена в виде пьезокристалла с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем и набором отражателей, встречно-штыревой преобразователь поверхностных акустических волн содержит две гребенчатые системы электродов, соединенные друг с другом шинами, связанными с микрополосковой приемопередающей антенной, выполненной также на поверхности пьезокристалла.
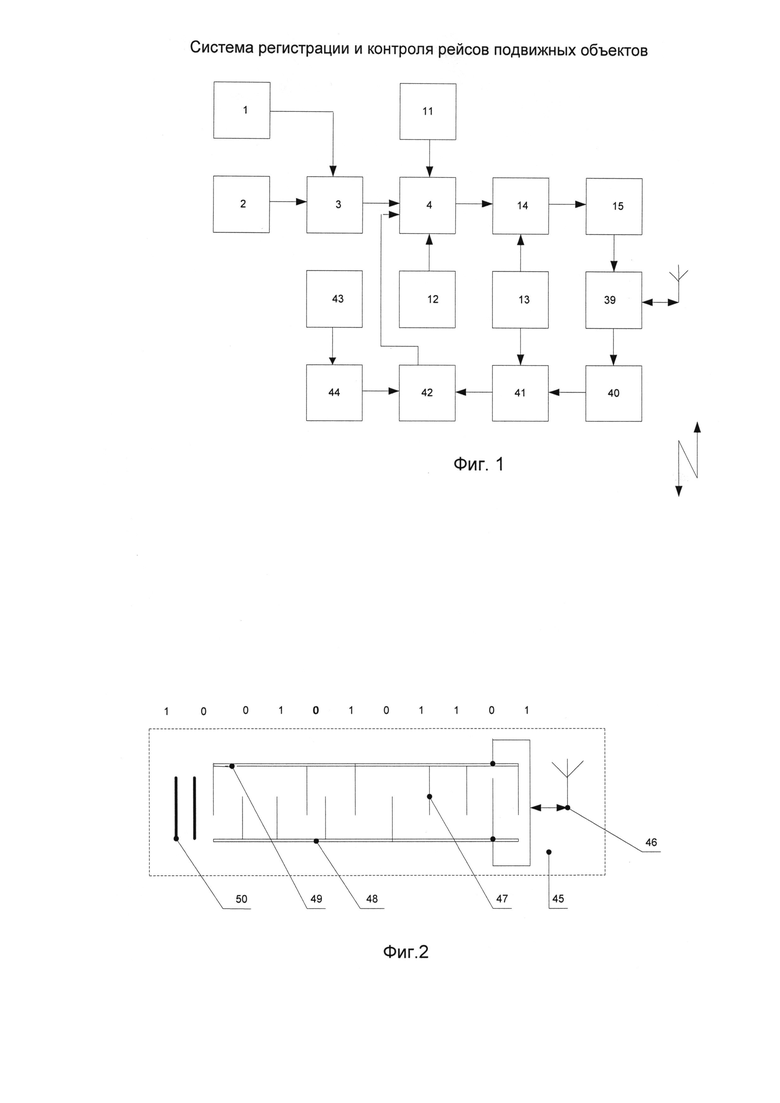
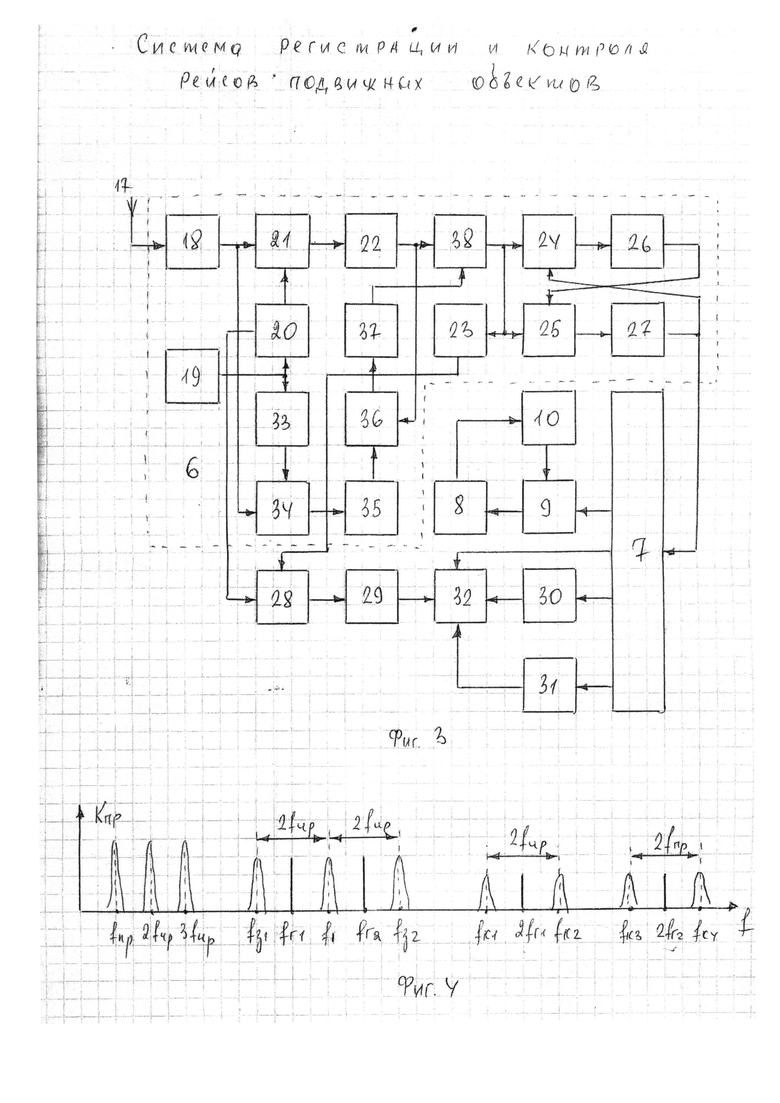
Структурная схема аппаратуры, устанавливаемой на подвижном объекте, представлена на фиг. 1. Структурная схема аппаратуры, устанавливаемая на пункте контроля, на фиг. 3. Функциональная схема радиочастотной метки изображена на фиг. 2. Частотная диаграмма, поясняющая процесс образования дополнительных каналов приема, показана на фиг. 4.
Аппаратура, устанавливаемая на подвижном объекте, содержит последовательно включенные датчик 1 давления, элемент И 3, второй вход которого соединен с выходом датчика 2 положения кузова, блок 4 кодирования, второй и третий входы которого соединены с выходами датчика 11 расхода топлива и датчика 12 пройденного пути соответственно, фазовый манипулятор 14, второй вход которого соединен с первым выходом генератора 13 высокой частоты, усилитель 15 мощности, циркулятор 39, вход-выход которого связан с приемопередающей антенной 16, усилитель 40 высокой частоты, фазовый детектор 41, второй вход которого соединен со вторым выходом генератора 13 высокой частоты, и сумматор 42, второй вход которого через формирователь 44 кода соединен с выходом таймера 43, а выход подключен к четвертому входу блока 4 кодирования.
Радиочастотная метка выполнена в виде пьезокристалла 45 с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем и набором 50 отражателей. Встречно-штыревой преобразователь (ВШП) поверхностных акустических волн (ПАВ) содержит две гребенчатые системы электродов 47, соединенные друг с другом шинами 48 и 49, связанными с микрополосковой приемопередающей антенной 46, выполненной также на поверхности пьезокристалла 45.
Аппаратура, устанавливаемая на пункте контроля, содержит последовательно включенные приемную антенну 17, усилитель 18 высокой частоты, первый смеситель 21, второй вход которого через первый гетеродин 20 соединен с выходом блока 19 поиска, первый усилитель 22 промежуточной частоты, второй ключ 38, первый перемножитель 24, второй вход которого соединен с выходом фильтра 27 нижних частот, узкополосный фильтр 26, второй перемножитель 25, второй вход которого соединен с выходом второго ключа 38, фильтр 27 нижних частот и дешифратор 7, к выходам которого подключены по числу контролируемых подвижных объектов исполнительные блоки, каждый из которых состоит из последовательно подключенных к дешифратору 7 элемента 9 запрета, блока 8 регистрации и формирователя 10 длительности импульсов, выход которого соединен с запрещающим входом элемента 9 запрета. К выходу усилителя 18 высокой частоты последовательно подключены второй смеситель 34, второй вход которого через второй гетеродин 33 соединен с выходом блока 19 поиска, второй усилитель 35 промежуточной частоты, коррелятор 36, второй вход которого соединен с выходом первого усилителя 22 промежуточной частоты, и пороговый блок 37, выход которого соединен с вторым входом второго ключа 38. К второму входу первого гетеродина 20 последовательно подключены первый ключ 28, второй вход которого через амплитудный детектор 23 соединен с выходом второго ключа 38, частотомер 29 и дополнительный блок 32 регистрации, второй, третий и четвертый входы которого соединены непосредственно и через счетчик 30 расхода топлива и счетчик 31 пройденного пути с соответствующими выходами дешифратора 7.
Система регистрации и контроля рейсов подвижных объектов работает следующим образом.
При подъеме кузова с грузом давление в масляной магистрали подъема кузова увеличивается, датчик 1 давления выдает сигнал, который поступает на первый вход логического элемента И 3. Последний выдает сигнал только тогда, когда на второй его вход поступает сигнал от датчика 2 положения кузова, который выдает сигнал лишь при поднятом в верхнее положение кузове. При наличии двух сигналов от датчика 1 давления и датчика 2 положения кузова элемент И 3 выдает сигнал, который поступает на первый вход блока 4 кодирования.
Описанная выше работа системы соответствует случаю, когда в качестве подвижного объекта используется автосамосвал.
При движении автосамосвала сигналы от датчика 11 расхода топлива и датчика 12 пройденного пути в виде серии импульсов также поступают на второй и третий входы блока 4 кодирования. Блок 4 кодирования формирует модулирующий код M1(t), в котором «зашита» информация о номерном знаке автосамосвала, количестве подъемом кузова с грузом, расходе топлива и пройденном пути. Модулирующий код M1(t) содержит N1 элементарных посылок длительностью τЭ. При этом первые n элементарных посылок несут в цифровом виде информацию о номерном знаке автосамосвала, m элементарных посылок отводятся количеству подъемов кузова с грузом, l элементарных посылок сообщают о расходе топлива и z элементарных посылок отражают пройденный путь автосамосвалом (N1=n+m+l+z).
Модулирующий код M1(t) с выхода блока 4 кодирования поступает на первый вход фазового манипулятора 14, на второй вход которого подается гармоническое колебание с первого выхода генератора 13 высокой частоты
U1(t)=V1*Cos(2πf1t+φ1), 0≤t≤T1
где V1,f1, φ1,T1 - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания.
На выходе фазового манипулятора 14 образуется фазоманипулированный (ФМн) сигнал
U2(t)=V1*Cos(2πf1t+φk1(t)+φ1), 0≤t≤T1
где φk1(t)={0,π} - манипулируемая составляющая фазы, отражающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φk1(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (k=1, 2, … N1-1);
τЭ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью T1 (T1=N1*τЭ),
который после усиления в усилителе 15 мощности через циркулятор 39 поступает в приемопередающую антенну 16 и излучается в эфир.
Следует отметить, что каждому самосвалу присущи свой модулирующий код Mi(t) и несущая частота fi (i=1, 2, …, S),
где S - количество контролируемых автосамосвалов.
При прохождении автосамосвалами мимо контрольной точки, на которой установлена радиочастотная метка, ФМн-сигнал U2(t) улавливается микрополоской антенной 46, преобразуется ВШП в акустическую волну, которая распространяется по поверхности пьезокристалла 45, отражается от набора 50 отражателей и опять преобразуется в сигнал с фазовой манипуляцией
U3=V3*Cos(2πf1t+φk2(t)+φ1), 0≤t≤T1
где φk2(t)={0,π} - манипулируемая составляющая фазы, отражающая закон фазовой манипуляции в соответствии с топологией ВШП M2(t), которая, в свою очередь, определяет порядковый номер и местоположение контрольной точки,
который излучается микрополосковой приемопередающей антенной 46 в эфир, улавливается приемопередающей антенной 16 автосамосвала и через циркулятор 39 и усилитель 40 высокой частоты поступает на первый (информационный) вход фазового детектора 41, на второй (опорный) вход которого в качестве опорного напряжения подается гармоническое колебание U1(t) со второго выхода генератора 13 высокой частоты. В результате синхронного детектирования на выходе фазового детектора 41 образуется низкочастотное напряжение
UH1(t)=VH1*Cosφk2(t), 0≤t≤T1
где UH1(t)=½V3*V1,
пропорциональное модулирующему коду M2(t), который определяет порядковый номер и местоположение контрольной точки.
Это напряжение поступает на первый вход сумматора 42.
Текущее время с выхода таймера 43 поступает на вход формирователя 44 кода, который формирует модулирующий код M3(t). Данный код поступает на второй вход сумматора 42, на выходе которого образуется суммарный код
MΣ(t)=M2(t)+M3(t),
который с выхода сумматора 42 поступает на четвертый вход блока 4 кодирования. Блок 4 кодирования формирует моделирующий код M4(t), в котором содержится информация о модулирующих кодах M1(t) и MΣ(t). Модулирующий код M4(t) содержит N2 'элементарных посылок длительностью τЭ. [N2=N1+p, где p - количество элементарных посылок, содержащих в модулирующем коде MΣ(t)].
Модулирующий код M4(t) с выхода блока 4 кодирования поступает на первый вход фазового манипулятора 14, на второй вход которого подается гармоническое колебание U1(t) с первого выхода генератора 13 высокой частоты.
На выходе фазового манипулятора 14 в этом случае образуется следующий ФМн сигнал
U4(t)=V1*Cos[2πf1t+φk3(t)+φ1], 0≤t≤T1
где φk3(t)={0,π} - манипулируемая составляющая фазы, отражающая закон фазовой манипуляции в соответствии с моделирующим кодом M4(t),
который после усиления в усилителе 15 мощности через циркулятор 39 поступает в приемопередающую антенну 16 и излучается в эфир.
На пункте контроля поиск ФМн-сигналов, принадлежащих различным подвижным объектам (автосамосвалам), осуществляется с помощью панорамного приемника 6. Для этого блок 19 поиска периодически с периодом Tп по пилообразному закону синхронно изменяет частоты fГ1 и fГ2 гетеродинов 20 и 33.
Принимаемый ФМн-сигнал U4(t) с выхода приемной антенны 17 через усилитель 18 высокой частоты поступает на первые входы смесителей 21 и 34, на вторые входы которых подаются напряжения гетеродинов 20 и 33:
UГ1(t)=VГ1*Cos(2πfГ1t+πγt2+φГ1),
UГ2(t)=VГ2*Cos(2πfГ2t+πγt2+φГ2), 0≤t≤T1
где VГ1, VГ2, fГ1, fГ2, φГ1, φГ2, Тп - амплитуды, начальные частоты, начальные фазы и период повторения (перестройки) напряжений гетеродинов;
γ=Дf/Тп - скорость изменения частот гетеродинов (скорость просмотра заданного диапазона частот Дf).
При этом частоты fГ1 и fГ2 гетеродинов 20 и 33 разнесены на удвоенное значение промежуточной частоты
fГ2-fГ1=2fпр,
выбраны симметричными относительно несущей частоты f1 основного канала приема
f1-fГ1=tГ2-f1=fпр
и перестраиваются синхронно (фиг. 4).
Это обстоятельство приводит к удвоению числа дополнительных каналов приема, но создает благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
На выходе смесителей 21 и 34 образуются напряжения комбинационных частот. Усилителями 22 и 35 промежуточной частоты выделяются следующие напряжения:
Uпр1(t)=Vпр1Cos(2πfпрt+φk3(t)-πγt2+φпр1),
Uпр2(t)=Vпр2Cos(2πfпрt+φk3(t)+πγt2+φпр2), 0≤t≤T1,
где Vпр1=½V1*VГ1; Vпр2=½V1*VГ2;
fпр=f1-fГ1=fГ2-f1 - промежуточная частота;
φпр1=φ1-φГ1; φпр2=φГ2-φ1;
которые представляют собой сложные сигналы с комбинированной фазовой манипуляцией и линейной частотной модуляцией (ФМн-ЛЧМ).
Эти напряжения поступают на два входа коррелятора 36, на выходе которого образуется корреляционная функция R(τ), которая сравнивается с пороговым напряжением Vпор в пороговом блоке 37. Пороговый уровень Vпор превышается только при максимальном значении корреляционной функции R(τ).
Так как канальные напряжения Uпр1(t) и Uпр2(t) образуются одним и тем же сложным ФМн-сигналом U4(t), принимаемым по двум каналам на одной и той же частоте f1, то между указанными канальными напряжениями существует сильная корреляционная связь. Корреляционная функция R(τ) ФМн-сигналов имеет ярко выраженный главный лепесток, который превышает пороговый уровень Vпор в пороговом блоке 37. При превышении порогового уровня Vпор в пороговом блоке 37 формируется постоянное напряжение, которое поступает на управляющий вход ключа 38, открывая его. В исходном состоянии ключи 28 и 38 всегда закрыты.
При этом напряжение Uпр1(t) с выхода усилителя 22 промежуточной частоты через открытый ключ 38 поступает на первые входы перемножителей 24 и 25. На второй вход перемножителя 25 подается напряжение с выхода узкополосного фильтра 26:
U5(t)=V5Cos(2πfпрt-πγt2+φпр1), 0≤t≤T1,
на выходе перемножителя 25 образуется низкочастотное напряжение
UH2(t)=VH2Cosφk3(t), 0≤t≤T1,
где VH2(t)=½V1*V5;
пропорциональное моделирующему коду M4(t).
Это напряжение поступает на второй вход перемножителя 24, на выходе которого образуется напряжение U5(t), выделяющееся узкополосным фильтром 26.
Напряжение UH2(t) одновременно с выхода фильтра 27 нижних частот поступает на вход дешифратора 7, который в зависимости от кода подвижного объекта (автосамосвала) выдает сигнал через элемент 9 запрета на вход блока 8 регистрации. Блок 8 регистрации, получив и запомнив сигнал, что рейс произведен, выдает сигнал на формирователь 10, который закрывает с помощью элемента 9 запрета вход блока 8 регистрации от дешифратора 7 на минимальное время рейса, исключая ложный зачет рейса в блоке 8 регистрации при повторном поднятии кузова в случае налипания материала на стенки кузова. Кроме того, при подъеме порожнего кузова датчик 1 давления не выдает сигнала.
Напряжение Uпр1(t) одновременно поступает на вход амплитудного детектора 23, продетектированный видеосигнал которого поступает на управляющий вход ключа 28, открывая его. При этом напряжение гетеродина 20 через открытый ключ 28 поступает на вход частотомера 29, где измеряется несущая частота f1 принимаемого ФМн-сигнала.
где 
Измеренное значение несущей частоты фиксируется дополнительным блоком 32 регистрации, где одновременно фиксируется бортовой номер подвижного объекта (автосамосвала), пройденный им путь, расход топлива, порядковые номера и местоположение контрольных точек, через которые проследовал автосамосвал.
Рассмотренная выше работа системы соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте f1.
Если сложный сигнал (помеха) принимается по первому зеркальному каналу на частоте fз1, то в смесителях 21 и 34 он преобразуется в напряжения следующих частот:
fз11=fГ1+γ1t-fз1=fпр+γ1t,
fз12=fГ2+γ1t-fз1=3fпр+γ1t,
 ;
;
 ,
,
где индекс в степени обозначает вторую гармонику частот гетеродинов.
Однако только напряжение с частотой fз11 попадает в полосу пропускания Δf1 усилителя 22 промежуточной частоты. Выходное напряжение коррелятора 36 равно нулю, ключ 38 не открывается, и ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте fз1, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по второму зеркальному каналу на частоте f32, по первому комбинационному каналу на частоте fк1 и по другим дополнительным каналам.
Если сложные сигналы (помехи) одновременно принимаются по первому и второму зеркальным каналам на частотах f31 и f32, то напряжения попадают в полосу пропускания Δf1 и Δf2 усилителей 22 и 35 промежуточной частоты. Но ключ 38 в этом случае не открывается. Это объясняется тем, что разные ложные сигналы (помехи) принимаются на разных частотах f31 и f32, поэтому между канальными напряжениями существует слабая корреляционная связь. Кроме того, следует отметить, что корреляционная функция помех не имеет ярко выраженного главного лепестка, как это имеет место у сложных ФМн-сигналов. Выходное напряжение коррелятора 36 в этом случае не превышает порогового уровня Vпор в пороговом блоке 37, ключ 38 не открывается, и ложные сигналы (помехи), принимаемые одновременно по первому и второму зеркальным каналам на частотах f31 и f32, подавляются.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые одновременно по двум другим дополнительным каналам.
Для передачи эксплуатационных показателей подвижных объектов (автосамосвалов) на пункт контроля используются сложные ФМн-сигналы, обладающие высокой помехоустойчивостью, энергетической и структурной скрытностью.
Система обеспечивает повышение помехоустойчивости и избирательности панорамного приемника. Это достигается подавлением ложных сигналов (помех), принимаемых по дополнительным каналам, за счет корреляционной обработки.
Таким образом, предлагаемая система по сравнению с прототипом обеспечивает дистанционный контроль за выполнением графика заданного маршрута движения подвижных объектов (автосамосвалов). Это достигается использованием контрольных точек, на которых установлены радиочастотные метки на поверхностных акустических волнах.
Фиксация времени прохождения подвижными объектами (автосамосвалами) определенных контрольных точек позволяет дистанционно контролировать график их движения по заданному маршруту и оперативно принимать решения о восстановлении ритмичности движения.
К основным характеристикам используемых радиочастотных меток на поверхностных акустических волнах относятся следующие:
- средняя мощность передатчика сканирующего устройства - не более 100 мВт;
- диапазон частот - 400-420 МГц (900-920 МГц);
- тип искусственного сигнала - сложный сигнал с фазовой манипуляцией;
- количество кодовых комбинаций - 232-2128;
- размеры 8*15*5 мм;
- срок службы - не менее 20 лет;
- потребляемая мощность 0 Вт;
- дальность действия (расстояние) - не менее 100 м.
Основной отличительной особенностью радиочастотных меток на поверхностных волнах являются малые размеры и отсутствие источников питания. Тем самым функциональные возможности системы расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2234735C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2000 |
|
RU2184992C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2003 |
|
RU2249252C2 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2233006C2 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ВЫСОКОТЕХНОЛОГИЧНЫХ СТРОИТЕЛЬНЫХ МОДУЛЕЙ | 2016 |
|
RU2619200C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
| Система дистанционного контроля за транспортировкой высокотехнологичных строительных модулей | 2018 |
|
RU2699451C1 |
| Система дистанционного контроля поставки материальных и технических ресурсов для восстановления объектов инфраструктуры | 2020 |
|
RU2734064C1 |
Изобретение относится к области технических средств регистрации и контроля рейсов подвижных объектов. Технический результат - осуществление контроля за выполнением графика заданного маршрута движения. Система регистрации и контроля рейсов подвижных объектов содержит контролируемые подвижные объекты, радиочастотные метки, содержащие пьезокристалл, микрополосковую приемопередающую антенну, электроды, две шины, и набор отражателей, и пункт контроля. На подвижном объекте установлены: датчики давления, положения кузова, расхода топлива, пройденного пути, элемент И, блок кодирования, передатчик, генератор высокой частоты, фазовый манипулятор, усилитель мощности, приемопередающую антенну, циркулятор, усилитель высокой частоты, фазовый детектор, сумматор, таймер и формирователь кода. На пункте контроля установлены: приемная антенна, усилитель высокой частоты, блок поиска, две гетеродины, два усилителя, два смесителя, два усилителя промежуточной частоты, амплитудный детектор, два перемножителя, узкополосный фильтр, фильтр низких частот, панорамный приемник, дешифратор, блок регистрации, элемент запрета, формирователь длительности импульсов, два ключа, коррелятор, пороговый блок, частотомер, счетчик расхода топлива, счетчик пройденного пути и дополнительный блок регистрации. 4 ил.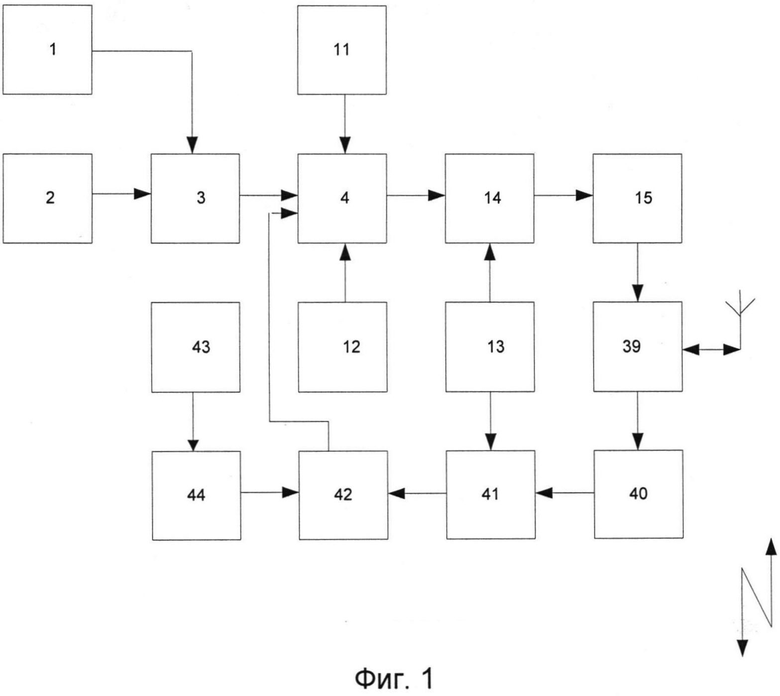
Система регистрации и контроля рейсов подвижных объектов, содержащая на каждом контролируемом подвижном объекте последовательно включенные датчик давления, элемент И, второй вход которого соединен с выходом датчика положения кузова, блок кодирования, второй и третий входы которого соединены с выходами датчика расхода топлива и датчика пройденного пути соответственно, фазовый манипулятор, второй вход которого соединен с первым выходом генератора высокой частоты, и усилитель мощности, а на пункте контроля последовательно включенные приемную антенну, усилитель высокой частоты, первый смеситель, второй вход которого через первый гетеродин соединен с выходом блока поиска, первый усилитель промежуточной частоты, второй ключ, первый перемножитель, второй вход которого соединен с выходом фильтра нижних частот, узкополосный фильтр, второй перемножитель, второй вход которого соединен с выходом второго ключа, фильтр нижних частот и дешифратор, к выходам которого подключены по числу контролируемых объектов исполнительные блоки, каждый из которых состоит из последовательно подключенных к дешифратору элемента запрета, блока регистрациии формирователя длительности импульсов, выход которого соединен с запрещающим входом элемента запрета, последовательно подключенные к выходу усилителя высокой частоты второй смеситель, второй вход которого через второй гетеродин соединен с выходом блока поиска, второй усилитель промежуточной частоты, коррелятор, второй вход которого соединен с выходом первого усилителя промежуточной частоты, и пороговый блок, выход которого соединен с вторым входом второго ключа, последовательно подключенные к второму входу первого гетеродина первый ключ, второй вход которого через амплитудный детектор соединен с выходом второго ключа, частотомер и дополнительный блок регистрации, второй, третий и четвертый входы которого соединены непосредственно и через счетчик расхода топлива и счетчик пройденного пути с соответствующими выходами дешифратора, при этом частоты гетеродинов разнесены на удвоенное значение промежуточной частоты
fГ2-fГ1=2fпр, где fГ2 и fГ1 - частоты второго и первого гетеродинов соответственно; fпр - промежуточная частота, выбраны симметричными относительно несущей частоты основного канала
f1-fГ1=fГ2-f1=fпр, где f1 - несущая частота,
и перестраиваются синхронно, отличающаяся тем, что она снабжена радиочастотными метками, устанавливаемыми в контрольных точках по маршруту движения подвижного объекта, который снабжен приемопередающей антенной, циркулятором, усилителем высокой частоты, фазовым детектором, сумматором, формирователем кода и таймером, причем к выходу усилителя мощности последовательно подключены циркулятор, вход-выход которого связан с приемопередающей антенной, усилитель высокой частоты, фазовый детектор, второй вход которого соединен со вторым выходом генератора высокой частоты, и сумматор, второй вход которого через формирователь кода соединен с выходом таймера, а выход подключен к четвертому входу блока кодирования, каждая радиочастотная метка выполнена в виде пьезокристалла с нанесенным на его поверхность плоскопленочным алюминиевым встречно-штыревым преобразователем и набором отражателей, встречно-штыревой преобразователь поверхностных акустических волн содержит две гребенчатые системы электродов, соединенные друг с другом шинами, связанными с микрополосковой приемопередающей антенной, выполненной также на поверхности пьезокристалла.
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2234735C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2492523C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

