Чтобы ускорять или затормаживать рельсовое транспортное средство, силы ускорения (тяговые силы) или тормозные силы должны передаваться в точке контакта между колесом и рельсом. Максимальная сила, передаваемая в этой точке контакта между колесом и рельсом, зависит, в основном, от условий трения между колесом и рельсом. На сухом рельсе передаются бóльшие силы, чем на мокром или скользком рельсе. Если при торможении рельсового транспортного средства требуется бóльшая тормозная сила, чем передается на основе условий трения между колесом и рельсом, то, по меньшей мере, одно из колес может заблокироваться и скользить по рельсу. Это состояние называется юзом. Если в противоположность этому при ускорении рельсового транспортного средства требуется большее ускорение (тяговая сила), чем передается на основе условий трения между колесом и рельсом, то, по меньшей мере, одно из колес может прокручиваться. Это состояние называется боксованием. Другими словами, боксование описывает состояние, в котором окружная скорость колеса больше скорости движения. Аналогично этому юз описывает состояние, в котором окружная скорость колеса меньше скорости движения. Если окружная скорость колеса идентична скорости движения, то это состояние называется качением.
В целом, возникновение относительного движения окружности колеса и рельса называется проскальзыванием. Если, следовательно, окружная скорость колеса и скорость движения неодинаковы, то имеет место проскальзывание. Кроме того, оно необходимо, чтобы вообще можно было передавать тяговые или тормозные силы между рельсом и колесом. Если на колесе проскальзывание равно нулю, то это означает, что это колесо свободно катится, т.е. на него не действуют никакие крутящие моменты. Следовательно, без проскальзывания невозможна никакая передача мощности, т.е. никакая передача тяговых или тормозных сил между колесом и рельсом. При очень большом проскальзывании, например при юзе или боксовании, в определенных условия между колесом и рельсом не могут передаваться большие усилия. Следовательно, оптимальное проскальзывание для передачи максимальных тяговых или тормозных сил лежит между нулем (состояние качения) и очень большим значением, например 100% (состояние юза или боксования).
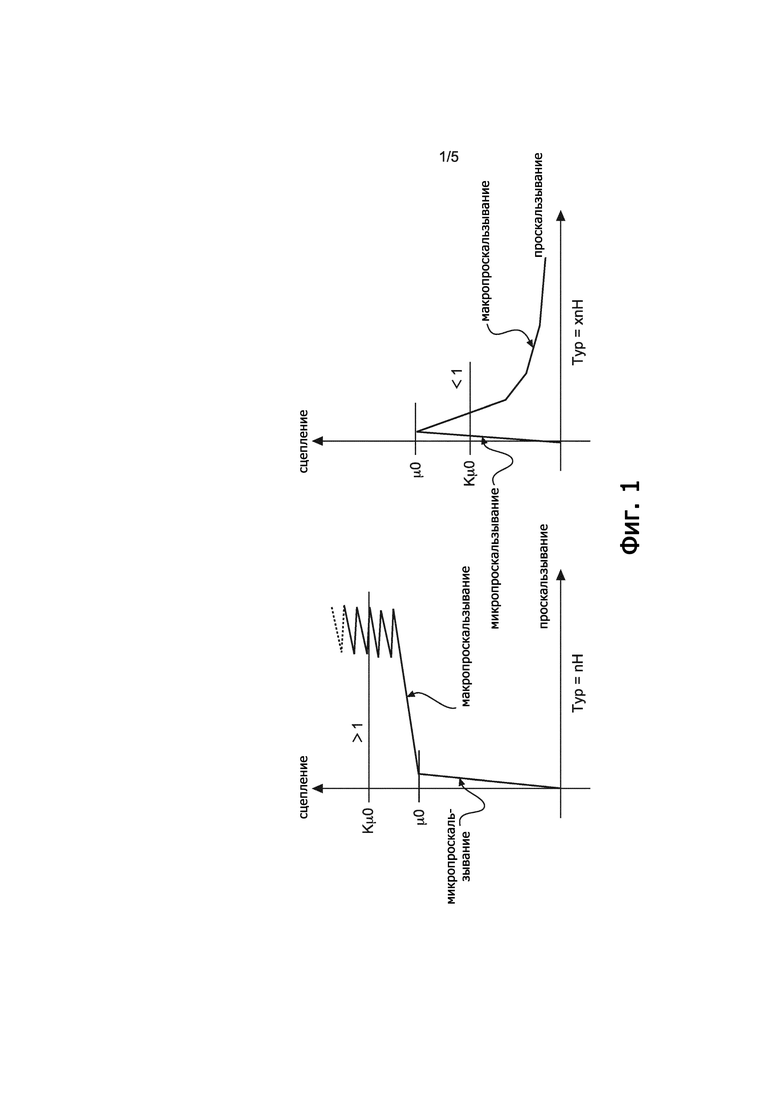
Оптимальное проскальзывание зависит от условий трения или от состояния трения между колесом и рельсом. Таким образом, оптимальное проскальзывание при мокром рельсе может быть иным, нежели при сухом рельсе. Разные условия трения между колесом и рельсом называются ниже типами силового замыкания. Различные типы силового замыкания в качестве примера изображены на фиг. 1.
На фиг. 1 изображены две диаграммы (силовое замыкание или сцепление в зависимости от проскальзывания) с различными типами силового замыкания. Диаграмма с левой стороны показывает тип силового замыкания, который известен среди специалистов как nH (низкое значение сцепления), причем тип силового замыкания с правой стороны известен как хnH (экстремально низкое значение сцепления). На (горизонтальной) оси х диаграмм нанесено проскальзывание, а (вертикальная) ось у показывает сцепление или пропорциональную, максимально передаваемую между колесом и рельсом силу трения или коэффициент трения. Кроме того, на диаграммах обозначено значение μ0, лежащее в точке перехода от микропроскальзывания к макропроскальзыванию. Часть графа с левой стороны μ0 показывает соответственно область микропроскальзывания, а часть графа с правой стороны μ0 – соответственно область макропроскальзывания. Кроме того, μ0 принципиально определяется максимальным коэффициентом трения в области микропроскальзывания (левая часть графа).
У изображенного слева типа nH силового замыкания максимальные силы передаются в области макропроскальзывания, а у изображенного справа типа хnH силового замыкания – в области μ0. Если, например, имеет место условие nH силового замыкания (левая диаграмма на фиг. 1), то, исходя из μ0, может быть приложена дополнительная тормозная сила, реализуемая в области макропроскальзывания, поскольку граф, исходя из μ0, возрастает дальше. Это поведение называется также «Self-Improvement». Если же, в противоположность этому, имеют место условия хnH силового замыкания, то тормозная сила может быть повышена в диапазоне между 0 и μ0 только вплоть до максимально устанавливаемой доли μ0, чтобы предотвратить переход в область макропроскальзывания (поскольку здесь граф, исходя из μ0, снова убывает, и «Self-Improvement» отсутствует). Эта максимально устанавливаемая доля μ0 обозначена на диаграммах как Кμ0 и относится к μ0. Следовательно, значение Кμ0 представляет собой коэффициент, который относится к μ0 и указывает процентную долю μ0, которая используется для передачи силы без опасения перехода у типа хnH силового замыкания в область макропроскальзывания. Для типа nH силового замыкания (левая диаграмма на фиг. 1) Кμ0>1, а для типа хnH силового замыкания (правая диаграмма на фиг. 1) Кμ0<1. Если, например, у типа хnH силового замыкания при торможении должно использоваться 80% (=0,8) μ0, чтобы обеспечить «безопасное расстояние» в 20% до области макропроскальзывания, то Кμ0 составляет 0,8.
Из уровня техники известны способы и устройства для перераспределения тормозных сил между отдельными вагонами и/или осями рельсового транспортного средства, если затребованную тормозную силу нельзя реализовать вследствие локального ограничения на одном из затормаживаемых вагонов и/или одной из затормаживаемых осей. Такое локальное ограничение может быть обусловлено, например, остеклением тормозного диска, тем, что требуемое усилие зажима по разным причинам нельзя приложить, или тем, что тормозные колодки не были надлежащим образом отрегулированы. В таком случае из уровня техники известно статическое перераспределение тормозных сил.
Если же затормаживаемое колесо (или затормаживаемая ось или затормаживаемый вагон) не может приложить требуемую тормозную силу вследствие условий трения между колесом и рельсом, то для этого неизвестен ни один способ целенаправленного перераспределения тормозных сил.
В основе изобретения лежит задача создания способа поддержания суммарной тормозной силы рельсового транспортного средства с учетом имеющихся в распоряжении условий силового замыкания, устройства и его применения, чтобы затормаживать рельсовое транспортное средств с требуемым замедлением, несмотря на то, что в точке контакта колеса и рельса условия трения имеют предельные значения. Эта задача решается посредством выполнения по независимым пунктам формулы. Предпочтительные варианты являются объектом зависимых пунктов.
Ниже используется понятие единиц. Под единицей следует понимать колесо, ось, несколько осей, тележку, вагон или несколько вагонов. Кроме того, ниже описано состояние, в котором у единицы активным является противоюзное регулирование, или что единица отрегулирована против юза. Это означает, что у этой единицы было обнаружено состояние юза и тормозная сила в ответ на этой единице уменьшается, чтобы предотвратить ее юз. Кроме того, на чертежах использовано сокращение WSP, означающее «Wheel Slide Protection». Система WSP, называемая ниже просто WSP, обнаруживает состояние юза на единице и уменьшает в ответ действующие на этой единице тормозные силы, чтобы ограничить проскальзывание и за счет этого, кроме того, предотвратить состояние юза или блокируемых колес на этой единице. Аналогично принципу действия WSP в области дорожных транспортных средств известна антиблокировочная система (ABS).
Кроме того, упомянутые в формуле изобретения функции называются ниже графами и на чертежах изображены как таковые, чтобы нагляднее описать заявленный способ. Согласно изобретению, функции необязательно должны быть представлены как графы, а способ может быть осуществлен на основе математических расчетов без графического изображения.
На основе приведенных пояснений юз возникает, в принципе, в области макропроскальзывания. Если юз возникает на единице и обнаруживается посредством WSP, то WSP определяет, кроме того, какой тип силового замыкания (nH или xnH, фиг. 1) имеет место на этой единице.
Если ниже говорится о том, что на единице активна WSP, то это означает, что WSP обнаружила на этой единице состояние юза и в ответ уменьшает на ней тормозную силу, чтобы ограничить юз.
Кроме того, ниже используется понятие суммарной тормозной силы. Чтобы остановить рельсовое транспортное средство на заданной остановке или достичь в заданной точке отрезка пути определенной уменьшенной скорости, рельсовое транспортное средство должно быть заторможено за счет общей или суммарной тормозной силы. Из этой суммарной тормозной силы возникают требуемые отдельные тормозные силы (требования торможения или требования тормозных сил) отдельных единиц. Сумма отдельных требований тормозных сил всех единиц дают общую или суммарную тормозную силу.
Благодаря предложенному способу предотвращается снижение суммарной тормозной силы всех единиц, вызванное недостаточными условиями сцепления или трения между рельсом и колесом, за счет временного дополнения тормозных сил на противоюзно еще не отрегулированных единицах. По сравнению с уровнем техники в этом состоянии в распоряжение предоставляется потенциально имеющаяся дополнительная суммарная тормозная сила, и одновременно предотвращается снижение суммарной тормозной силы вследствие недостаточных условий сцепления или трения между рельсом и колесом.
Согласно изобретению, в одном примере на всех противоюзно отрегулированных осях формируется среднее значение μ0 и Кμ0. На основе сформированных средних значений μ0 и Кμ0 формируется соответствующий постоянный граф для μ0 и Кμ0, который содержит соответственно сформированное среднее значение. Следовательно, для каждой противоюзно еще не отрегулированной единицы можно определить, можно ли реализовать дополнительную тормозную силу или если да, то насколько. Эти единицы в ответ предоставляют в распоряжение дополнительную тормозную силу. Формирование/расчет графов (для значений μ0 и Кμ0) в виде постоянно проходящих графов предпочтительно/предпочтителен в том отношении, что для этого требуется лишь небольшой объем вычислений, а ход графов, тем самым, возникает быстрее. Следовательно, при регулировании достигается предельно короткий отклик.
Согласно изобретению, в другом примере графы для μ0 и Кμ0 формируются в виде функции первой степени, т.е. с линейным ходом. Формирование/расчет графов (для значений μ0 и Кμ0) в виде функции первой степени предпочтительно/предпочтителен в том отношении, что требуется, правда, больший объем вычислений, чем при постоянном ходе, однако можно лучше учитывать изменяющиеся условия трения между колесом и рельсом по всей длине рельсового транспортного средства (более высокая детализация). Следовательно, регулирование отдельных тормозных сил на отдельных единицах может происходить точнее.
Согласно изобретению, в другом примере графы для μ0 и Кμ0 формируются в виде функции, по меньшей мере, второй степени. Для этого аналогично предыдущим рассуждениям требуется, правда, больший объем вычислений, однако возникает еще более точный ход графа, благодаря чему обеспечивается еще более точное регулирование отдельных тормозных сил на отдельных единицах.
Более точное регулирование означает, что отдельные тормозные силы подводятся ближе к их максимальному тормозному потенциалу, в результате чего повышается суммарная тормозная сила всего рельсового транспортного средства.
Согласно изобретению, в другом примере в расчет/определение графов для μ0 и Кμ0 входят другие внешние факторы влияния, например положение рельсового транспортного средства, погода, влажность, скорость или направление движения рельсового транспортного средства. благодаря этому можно учесть заранее известные факторы влияния, которые позволяют ожидать изменения хода графов для μ0 и Кμ0. Это происходит аналогично известному из техники регулирования предварительному управлению.
Если динамическое дополнение суммарной тормозной силы за счет повышения отдельных тормозных сил отдельных единиц в текущий момент времени невозможно, то в дополнение к упомянутым выше способам потерянный тормозной путь (тормозная сила в зависимости от времени и скорости) в процессе торможения можно впоследствии дополнить, согласно изобретению, за счет повышения всего требования тормозной силы (сумма требований тормозных сил всех единиц). Потерянный тормозной путь определяется на основе суммарной тормозной силы с учетом скорости и массы рельсового транспортного средства и определяет калькуляцию дополнительного требования торможения. Это происходит итеративно, пока потерянный тормозной путь не будет компенсирован.
Согласно изобретению, согласование отдельных требований торможения с соответствующим значением функции Кμ0 может происходить как за счет повышения, так и за счет снижения отдельных требований торможения. За счет этого на каждой единице достигается оптимальная тормозная сила.
В качестве альтернативы этому отдельные требования торможения могут изменяться только тогда, когда они повышаются предложенным способом. Это гарантирует, что отдельные требования торможения ни в коем случае не будут снижены. Благодаря такому выполнению упрощается интеграция предложенного способа в систему регулирования торможения, поскольку могут возникнуть общие юридические и, в частности, разрешительно-правовые требования, если предложенный способ или предложенное устройство предназначено также для того, чтобы можно было снижать отдельные требования торможения.
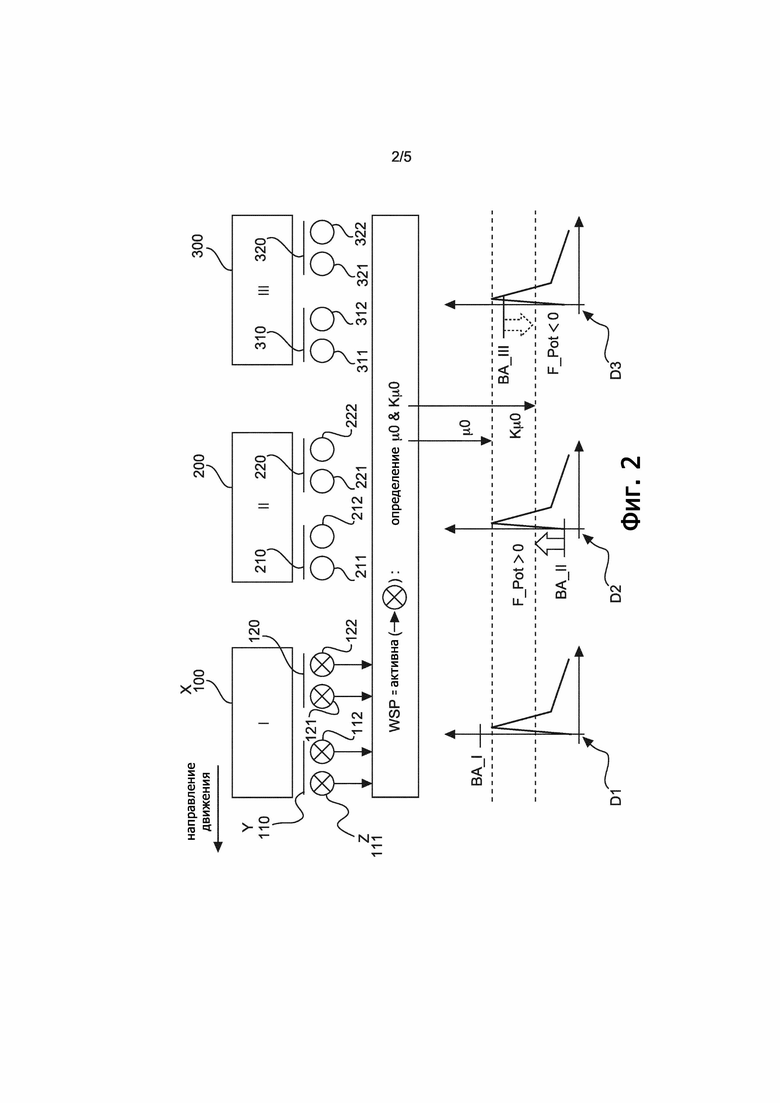
На фиг. 2 вверху в схематичном виде сбоку изображено рельсовое транспортное средство с тремя вагонами, а именно одним вагоном слева, одним вагоном посередине и одним вагоном справа. В этом примере направление движения рельсового транспортного средства предполагается влево. Кроме того, каждый вагон соответствует одной единице. Следовательно, левый вагон соответствует единице I, средний вагон – единице II, а правый вагон – единице III. Каждый вагон I, II, III содержит обозначенный прямоугольником кузов Х00 (Х = 1, 2, 3), причем под каждым из этих кузовов расположены по две тележки XY0 (Y = 1, 2) и по две оси XYZ (Z = 1, 2) на тележку Y, из которых при виде сбоку видно соответственно одно колесо. Переменная Х обозначает вагон (первый, второй или третий или I, II или III), буква Y – тележку (первая или вторая тележка вагона Х), а Z – ось (первая или вторая ось тележки Y). Колеса осей XYZ обозначены кружками, а тележки XY0 – горизонтальными штрихами над колесами или осями XYZ.
У единицы/вагона I оси 111, 112 смонтированы на тележке 110, а оси 121, 122 – на тележке 120. Тележки 110, 120 смонтированы на кузове 100. Конфигурация других единиц/вагонов II, III аналогична описанной. В данном примере единица I включает в себя кузов 100, тележки 110, 120 и оси 111, 112, 121, 122. В другом примере (не показан) единица соответствует тележке со смонтированными на ней осями. Еще в одном примере (не показан) единица соответствует оси. Еще в одном примере (не показан) каждый вагон содержит любое число тележек с любым числом смонтированных на них осях.
Соотнесение отдельных конструктивных элементов с единицами может быть установлено в соответствии с требованиями. Если желательна повышенная точность регулирования, то единица может включать в себя ось. Чтобы уменьшить детализацию и, тем самым, затраты на вычисления при регулировании, единица может включать в себя вагон. Чтобы достичь компромисса между точностью регулирования и затратами на вычисления, единица может включать в себя тележку. Чтобы достичь других преимуществ, это соотнесение может варьироваться, кроме того, по всему рельсовому транспортному средству. Например, одна единица может включать в себя только одну ось и/или только одну тележку, причем другая единица включает в себя весь вагон. Это соотнесение отдельных конструктивных элементов с единицами может быть неизменным по времени, однако может также изменяться по времени.
Как уже упомянуто, на фиг. 2 каждая единица I, II, III включает в себя вагон. Колеса вагона единицы I отмечены крестиком, а колеса вагонов единиц II, III – нет. Отмеченное крестиком колесо означает, что соответствующая ему ось в текущий момент противоюзно отрегулирована, следовательно, на этой оси имеет место юз, т.е. ось в текущий момент скользит по рельсу. Поскольку единица I включает в себя весь первый вагон, т.е. также оси 11, 112, 121, 122, можно обнаружить юз только на всей единице I, т.е. на всех названных осях. Если бы каждая единица содержала только одну ось, то на каждой отдельной оси можно было бы независимо обнаружить юз.
Следовательно, на фиг. 2 юз обнаружен на первой единице I. Другие единицы II, III в текущий момент противоюзно не отрегулированы из-за низкого требования торможения, а на других осях юз не обнаружен. Поэтому колеса единиц II, III не отмечены крестиком. На единственной противоюзно отрегулированной единице I определяется теперь данный тип силового замыкания, на фиг. 2 это тип xnН. Кроме того, определяются значения μ0 и Кμ0. Эти этапы изображены на фиг. 2 по отношению к вертикальному расположению приблизительно посередине. Вслед за этим формируются граф для значения μ0 и граф для значения Кμ0. Эти графы соответствуют в данном случае (горизонтально проходящей) постоянной. Ход графов обозначен штриховой линией. У типа xnН силового замыкания граф для значения μ0 лежит выше графа для значения Кμ0. Как уже сказано, значение Кμ0 соответствует доле имеющейся в распоряжении тормозной силы (потенциал сцепления), используемой для торможения. Для каждой единицы II, III в этом примере на основе данных единственной противоюзно отрегулированной единицы I предполагается идентичный тип xnН силового замыкания с идентичным ходом диаграммы D1, D2, D3 «силовое замыкание в зависимости от проскальзывания». Следовательно, для единиц II, III предполагается идентичное значение μ0 и Кμ0, как оно было определено для единицы I. μ0 и Кμ0 могут определяться для каждой единицы I, II, III только тогда, когда она в текущий момент противоюзно отрегулирована.
Как уже упомянуто, из выявленных на единице I значений μ0 и Кμ0 возникает постоянный ход графов, в результате чего для единиц II, III возникают идентичные значения μ0 и Кμ0. Следовательно, для каждой единицы I, II, III возникает идентичная диаграмма D1, D2, D3 «силовое замыкание в зависимости от проскальзывания». Кроме того, на этих диаграммах на (вертикальной) оси силового замыкания отмечено запрошенное в текущий момент требование ВА_I, ВА_II ВА_III торможения. Для единицы I запрошенное в текущий момент требование ВА_I торможения лежит выше значения μ0. Это также причина того, почему единица I имеет юз, т.к. запрашивается более высокое требование ВА_I торможения, чем позволяет коэффициент трения μ0.
Согласно этому первому варианту, требование ВА_I торможения единицы I уменьшается до значения Кμ0, а, кроме того, согласно изобретению, также требование ВА_II торможения единицы II и требование ВА_III торможения единицы III регулируются до значения Кμ0 без возникновения юза на единицах II, III. Текущее требование ВА_II торможения единицы II лежит ниже Кμ0 и, следовательно, повышается (имеет место потенциал F_Pot > 0 тормозной силы). Текущее требование ВА_III торможения единицы III лежит выше Кμ0 и, следовательно, снижается (имеет место потенциал F_Pot < 0 тормозной силы). Таким образом, можно затормозить сильнее (стрелка вверх у ВА_II), не попадая в состояние юза. Напротив, у единицы III тормозная сила уменьшается (стрелка вниз у ВА_III), чтобы предотвратить опасность юза.
Согласно второму варианту (не показан), снижение тормозных сил принципиально не производится. Требование ВА_I торможения единицы I и требование ВА_III торможения единицы III не уменьшаются, следовательно, до значения Кμ0. Требование ВА_II торможения единицы II регулируется, согласно изобретению, до значения Кμ0, т.е. повышается, поскольку имеет место потенциал F_Pot > 0 тормозной силы. Таким образом, оптимальный потенциал силового замыкания используется на всех единицах при условии, что ни на одной из единиц I, II, III требование торможения не снижается.
Согласно третьему варианту (не показан), снижение тормозных сил или требований ВА_I, ВА_II ВА_III торможения происходит лишь опционально. Согласно этому третьему варианту, можно предварительно настроить или выбрать осуществление способа по первому или второму варианту.
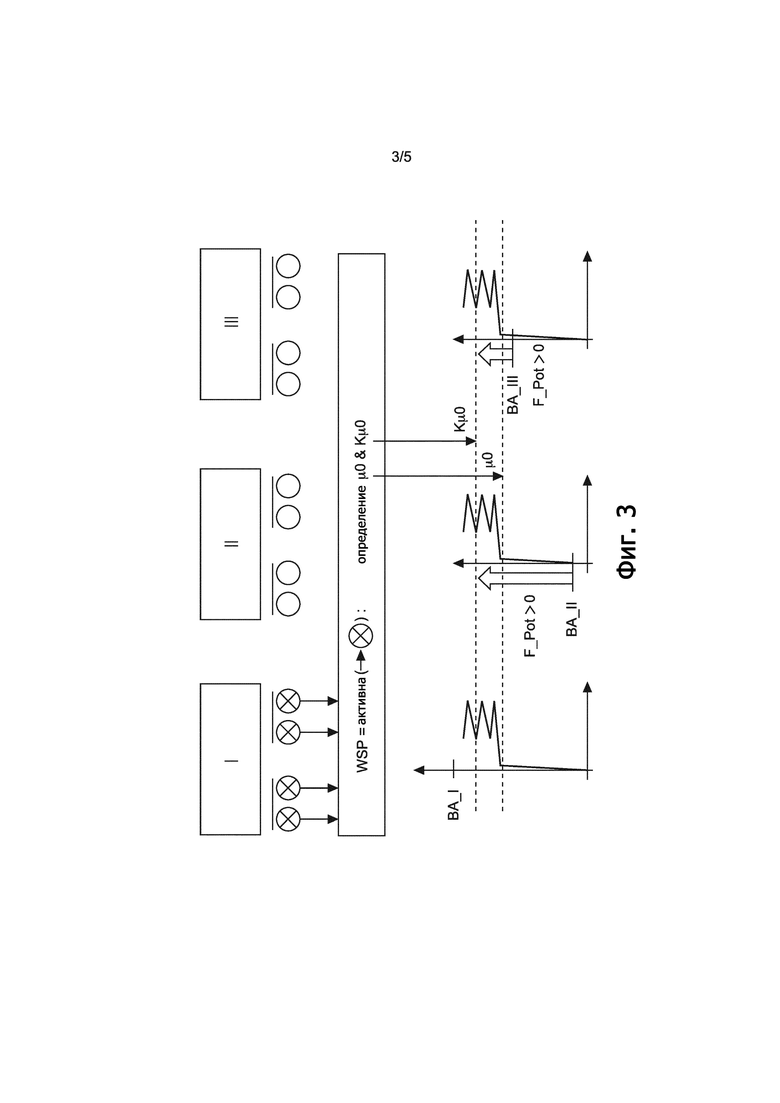
На фиг. 3 изображен пример из фиг. 2, причем в показанном на фиг. 3 состоянии тип nH силового замыкания был определен на единственной единице I с юзом. Следовательно, в этом состоянии значение Кμ0 лежит выше значения μ0. Как текущее требование ВА_II торможения единицы II, так и текущее требование ВА_III торможения единицы III лежит здесь ниже Кμ0, поэтому для обеих единиц II, III можно повысить текущую тормозную силу (F_Pot > 0, стрелки вверх у ВА_II и ВА_III).
Если в примере на фиг. 2 и 3 юз обнаруживается на нескольких единицах I, II, III, то для определения (постоянных) графов для Кμ0 и μ0 среднее значение формируется из зарегистрированных на единицах с юзом значений для μ0, и из них определяется или рассчитывается постоянный граф для μ0 и Кμ0. В другом нижеследующем примере постоянный граф для Кμ0 и μ0 формируется лишь тогда, когда юз обнаруживается только на одной из единиц I, II, III. Если юз обнаруживается на нескольких единицах I, II, III, то для Кμ0 и μ0 граф формируется описанным ниже образом.
Обозначения отдельных конструктивных элементов и их соотнесение с единицами I, II, III остаются неизменными в описанных ниже примерах.
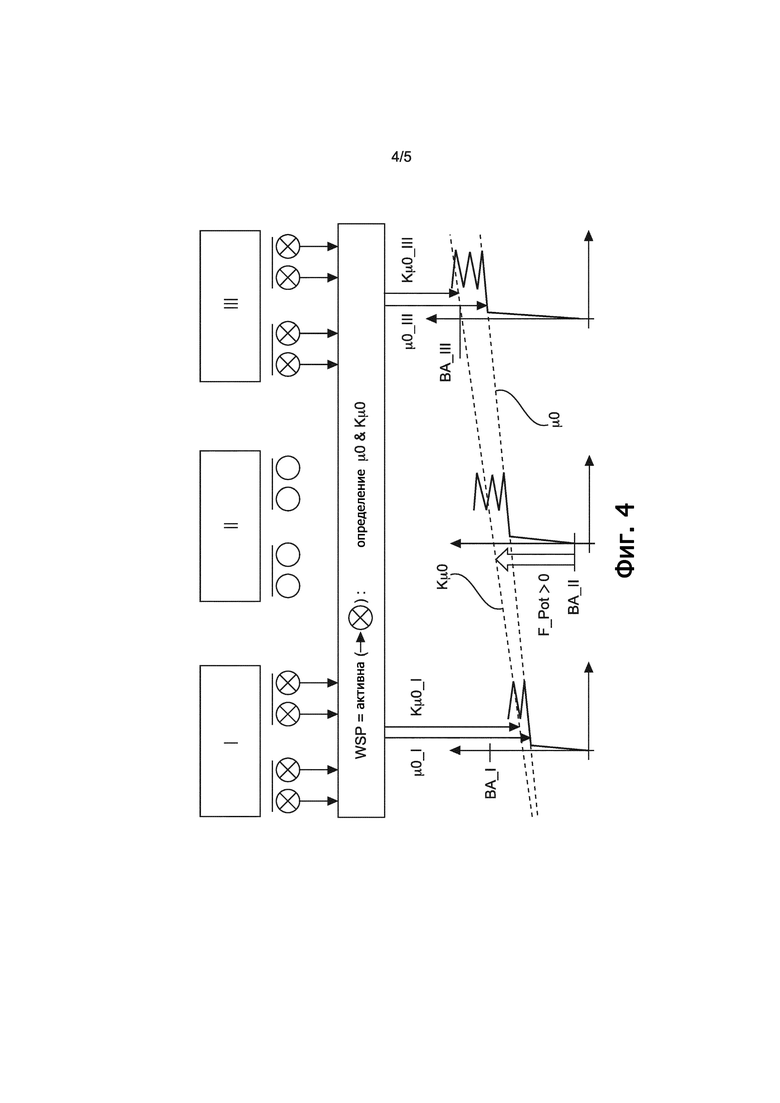
На фиг. 4 изображен другой пример, в котором графы для Кμ0 и μ0 проходят не постоянно, а линейно (по функции первой степени). В показанном состоянии юз обнаруживается на единицах I, III (отмеченные крестиком колеса единиц I, III), следовательно, на единицах I, III можно определить текущий тип силового замыкания (здесь nH), а также значения μ0_I и Кμ0_I для единицы I и μ0_III и Кμ0_III для единицы III. Из этих значений формируется линейно проходящий граф для μ0, содержащий значения μ0_I и μ0_III. Кроме того, формируется линейно проходящий граф для Кμ0, содержащий значения Кμ0_I и Кμ0_III. Текущее требование ВА_II торможения единицы II лежит здесь ниже значения Кμ0 в месте единицы II (точка пересечения графа Кμ0 с осью у единицы II), так что в этом месте требование ВА_II торможения единицы II повышается до значения Кμ0 (стрелка вверх у ВА_II), чтобы использовать имеющийся потенциал силового замыкания.
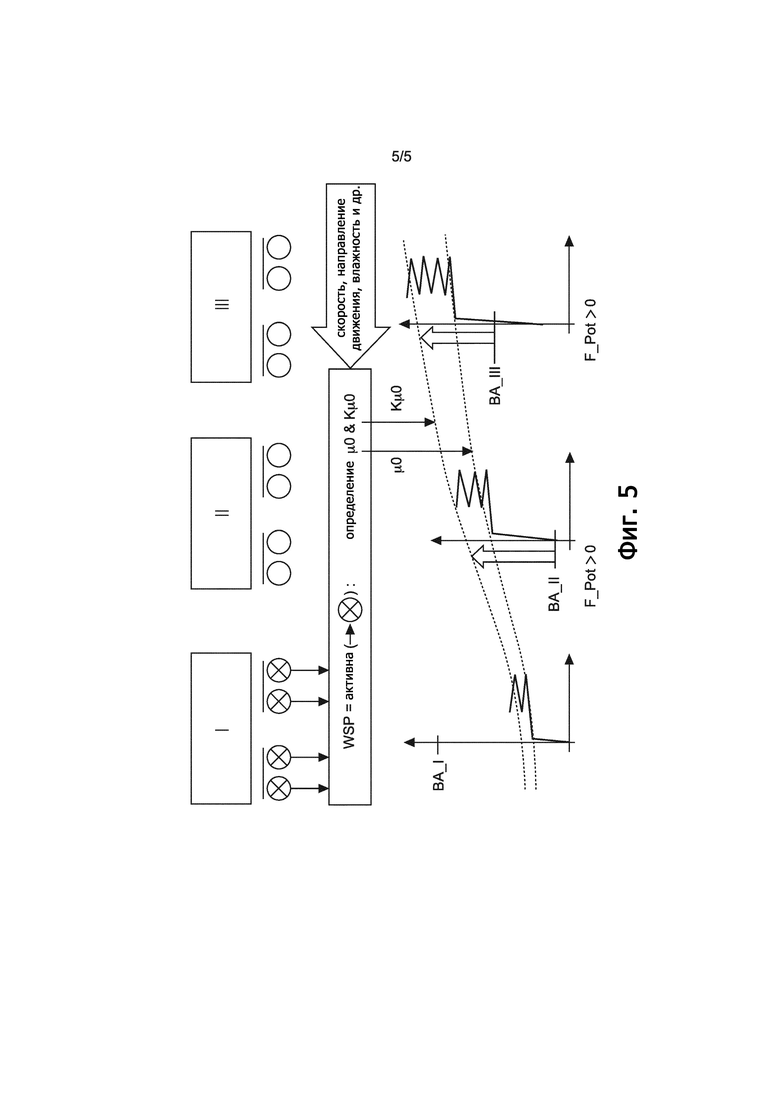
На фиг. 5 изображен другой пример, в котором графы для Кμ0 и μ0 ни постоянны, ни линейны, а проходят по функции, по меньшей мере, второй степени. Дальнейшая конфигурация этого примера идентична описанным выше примерам, в частности также соотнесение конструктивных элементов с единицами I, II, III. В изображенном состоянии юз обнаруживается на единице I (отмеченные крестиком колеса единицы I), следовательно, на единице I можно определить текущий тип силового замыкания (здесь nH), а также значения μ0 и Кμ0 для единицы I. Для расчета хода графа значений μ0 и Кμ0 в этом примере привлекаются еще факторы влияния, например скорость V_Fzg транспортного средства и/или направление движения и/или текущую влажность воздуха и/или текущую влажность рельсов и/или окружающую температуру и/или специальные свойства транспортного средства (например, массу, межосевое расстояние) и т.д. За счет привлечения этих дополнительных факторов влияния и использования режима расчета возникает ход графов для μ0 и Кμ0, который ни постоянный, ни линейный, а следует функции, по меньшей мере, второй степени. Определяется, лежат ли требования ВА_II и ВА_III торможения единиц II и III ниже соответствующих значений Кμ0. Следовательно, требования ВА_II и ВА_III торможения единиц II и III повышаются до соответствующего значения графа Кμ0 (стрелка вверх у ВА_II и ВА_III).
В другом примере (не показан) графы для μ0 и Кμ0 имеют постоянный или линейный ход, хотя для расчета хода графов привлекаются, как сказано, дополнительные факторы влияния.
В другом примере (не показан) графы для μ0 и Кμ0 определяются в тот момент, когда ни одна из единиц не имеет юза в области макропроскальзывания. Ход графов определяется при этом путем измерений, основанных на одном или нескольких определении/определениях возрастания силового замыкания в зависимости от проскальзывания с последующей оценкой, например из хранящего в памяти поля характеристик.
Изобретение относится к тормозным системам рельсовых транспортных средств. Для поддержания суммарной тормозной силы рельсового транспортного средства с учетом имеющихся в распоряжении условий силового замыкания осуществляют обнаружение противоюзного регулирования по меньшей мере одной единицы (I, II, III), запрашивание имеющегося на противоюзно отрегулированных единицах (I, II, III) типа (nH, xnH) силового замыкания, определение значений μ0 и Kμ0 для каждой противоюзно отрегулированной единицы (I, II, III), формирование функции для значения μ0 и функции для значения Kμ0 соответственно по всему ходу единиц (I, II, III). В продольном направлении рельсового транспортного средства, на основе выявленных значений μ0 и Kμ0 противоюзно отрегулированных единиц (I, II, III), сравнивают текущее требование (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III), также противоюзно неотрегулированных единиц (I, II, III), со значением функции Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения, изменение каждого требования (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III), также противоюзно неотрегулированных единиц (I, II, III), до соответствующего значения функции Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения. Достигается затормаживание рельсового транспортного средства с требуемым замедлением. 2 н. и 7 з.п. ф-лы, 5 ил.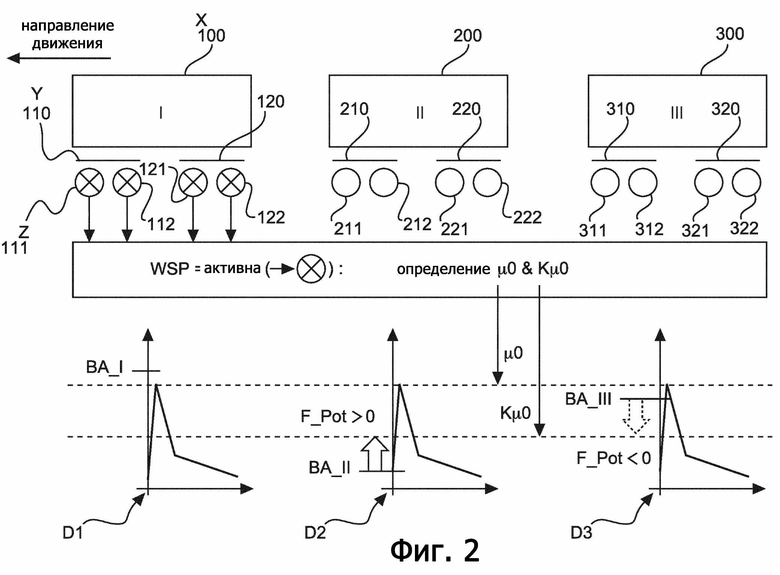
1. Способ поддержания суммарной тормозной силы рельсового транспортного средства с учетом имеющихся в распоряжении условий силового замыкания, включающий в себя следующие этапы:
- обнаружение противоюзного регулирования по меньшей мере одной единицы (I, II, III),
- запрашивание имеющегося на противоюзно отрегулированных единицах (I, II, III) типа (nH, xnH) силового замыкания,
- определение значений μ0 и Kμ0 для каждой противоюзно отрегулированной единицы (I, II, III),
- формирование функции для значения μ0 и функции для значения Kμ0 соответственно по всему ходу единиц (I, II, III), т.е. в продольном направлении рельсового транспортного средства, на основе выявленных значений μ0 и Kμ0 противоюзно отрегулированных единиц (I, II, III),
- сравнение текущего требования (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III), т.е. также противоюзно неотрегулированных единиц (I, II, III), со значением функции Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения,
- изменение каждого требования (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III), т.е. также противоюзно неотрегулированных единиц (I, II, III), до соответствующего значения функции Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения.
2. Способ по п. 1, в котором изменение каждого требования (BA_I, BA_II, BA_III) торможения до соответствующего значения функции Kμ0 осуществляют только при таком требовании (BA_I, BA_II, BA_III) торможения, которое за счет этого повышают.
3. Способ по п. 1 или 2, в котором как функция для значения μ0, так и функция для значения Kμ0 постоянная, образованная средним значением соответствующих значений μ0 и Kμ0 на противоюзно отрегулированных единицах (I, II, III).
4. Способ по п. 1, в котором как функция для значения μ0, так и функция для значения Kμ0 линейная, образованная соответствующими значениями μ0 и Kμ0 двух противоюзно отрегулированных единиц (I, II, III).
5. Способ по п. 1, в котором как функция для значения μ0, так и функция для значения Kμ0 является функцией по меньшей мере второй степени, образованной соответствующими значениями μ0 и Kμ0 нескольких противоюзно отрегулированных единиц (I, II, III).
6. Способ по п. 1 или 5, в котором по меньшей мере одну из функций значений μ0 и Kμ0 согласовывают на основе дополнительных факторов влияния, например положения рельсового транспортного средства, погоды, влажности, скорости, окружающей температуры, параметров транспортного средства, таких, в частности, как масса транспортного средства или межосевые расстояния, или направления движения.
7. Способ поддержания суммарной тормозной силы рельсового транспортного средства с учетом имеющихся в распоряжении условий силового замыкания, включающий в себя следующие этапы:
- определение функции для значений μ0 и Kμ0 на основе одного или нескольких определения/определений возрастания силового замыкания в зависимости от проскальзывания по меньшей мере на одной из единиц (I, II, III) с последующей оценкой без противоюзного регулирования одной из единиц (I, II, III),
- сравнение текущего требования (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III) с функцией значения Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения,
- изменение каждого требования (BA_I, BA_II, BA_III) торможения на каждой из единиц (I, II, III) до соответствующего значения функции Kμ0 в месте соответствующего требования (BA_I, BA_II, BA_III) торможения.
8. Способ по п. 7, в котором изменение каждого требования (BA_I, BA_II, BA_III) торможения до соответствующего значения функции Kμ0 осуществляют только при таком требовании (BA_I, BA_II, BA_III) торможения, которое за счет этого повышают.
9. Способ по п. 7 или 8, включающий в себя дополнительные этапы:
- определение того, что компенсация требуемой суммарной тормозной силы всех единиц (I, II, III), основанная на предыдущих способах, невозможна на основе временно недостаточных условий сцепления или трения между колесом и рельсом,
- повышение требуемой суммарной тормозной силы всех единиц (I, II, III), в результате чего компенсация потерянного тормозного пути возможна в более поздний момент времени, когда условия сцепления или трения подходят для этого.
| DE 102014102881 A1, 10.09.2015 | |||
| WO 2013034694 A1, 14.03.2013 | |||
| DE 102014204814 A1, 17.09.2015 | |||
| СПОСОБ УПРАВЛЕНИЯ СНАБЖЕННОЙ ПРОТИВОЮЗНЫМ РЕГУЛЯТОРОМ ФРИКЦИОННОЙ ТОРМОЗНОЙ СИСТЕМОЙ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2564461C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ЮЗА ТОРМОЗЯЩЕГО КОЛЕСА | 2003 |
|
RU2237587C1 |

