Изобретение относится к морским геофизическим исследованиям и может быть использовано для выполнения съемки геомагнитного поля на акватории с целью обследования характерных аномалий геомагнитного поля (ГМП) с повышенной точностью и подробностью в интересах решения конкретных прикладных задач вооруженных сил и народного хозяйства.
Известен способ съемки ГМП на акватории буксируемым магнитометром, включающий буксировку судном по заданным запланированным галсам гондолы с магнитометром и измерение при этом напряженности ГМП буксируемым магнитометром, определение геодезических координат мест данных измерений, а также определение поправок за девиацию и вариацию ГМП на акватории и их регистрацию (Инструкция по эксплуатации морского буксируемого магнитометра МБМ. Издательство Главного управления навигации и океанографии МО СССР, Л., 1977 [1]).
Известен буксируемый магнитометр, содержащий магниточувствительный элемент, приемоизмерительный блок, блок управления, регистратор, при этом выход магниточувствительного элемента соединен через блок управления с входом приемоизмерительного блока, выход которого соединен с входом регистратора [1]. Однако этот способ и устройство для его осуществления имеют недостаточно высокую точность, так как при их реализации не исключаются с требуемой точностью погрешности, обусловленные пространственно временной изменчивостью магнитного поля буксирующего судна, гондолы с магнитометром и вариацией поля земли, имеющих место на съемочной акватории, недостаточно точным определением геодезических координат чувствительного элемента буксируемого магнитометра. Для определения поправок за девиацию, обусловленных магнитным полем буксирующего судна, и вариаций поля Земли на съемочной акватории создают в заданном месте на съемочной акватории опорный магнитный пункт, используя для этой цели известную магнитную вариационную станцию, с помощью которой определяют геодезические координаты и напряженность нормального магнитного поля Земли в опорном магнитном пункте с требуемой точностью (Инструкция по морской магнитной съемке (ИМ-86). Издательство Главного управления навигации и океанографии МО СССР, Л., 1986 г. [2]).
Поправку за девиацию определяют путем многократного прохождения через опорный магнитный пункт буксируемым магнитометром и измерения при этом магнитного поля Земли [2].
Поправку за вариацию магнитного поля Земли получают по измерениям напряженности магнитного поля Земли вариационной станцией в опорном магнитном пункте за время съемки магнитного поля на акватории [2].
Полученные поправки за девиацию и вариацию магнитного поля Земли используются для исправления измеренных буксируемым магнитометром напряженности магнитного поля Земли по всей акватории съемки, в результате чего возникают погрешности съемки магнитного поля на акватории, обусловленные пространственно временной изменчивостью магнитного поля буксирующего катера (судна) гондолы с магнитометром и магнитного поля Земли на акватории съемки. Как показывает опыт, данные погрешности могут достигать 5-10 нТл в зависимости от акватории съемки (Иванов М.М. Магнитная съемка океанов. - В кн. Геомагнетизм, М., «Наука», 1966, с. 5-9. [3]. Магниторазведка. Справочник геофизика. Под редакцией В.Е. Никитинского и Ю.С. Глебовского. М., «Наука»,1980, с. 176-179 [4]).
Допустимая точность съемки ГМП на акватории составляет 1 нТл [2]. В настоящее время геодезические координаты (х, y) буксируемой гондолы с магнитометром определяют по длине вытравленного кабель-троса, к которому прикреплена буксируемая гондола магнитометра, и азимутальным направлением вытравленного троса, решая прямую геодезическую задачу ([2], патент SU №1073607 А1,15.02.1984 [5]). Однако данный способ определения геодезических координат буксируемой гондолы с магнитометром имеет недостаточно высокую точность. Это обусловлено тем, что в процессе магнитной съемки, в зависимости от изменения скорости буксировки, а также под влиянием гидрометеорологических факторов (волнения, течений и др.), изменяется длина буксируемого кабель-троса за счет его изгиба и азимутальное его направление, что приводит к определению геодезических координат буксируемой гондолы с магнитометром с существенной погрешностью составляющей, как показывает опыт, десятки метров [2].
Для проведения съемки ГМП с целью, например, поиска ферромагнитных объектов (мин. и др.), расположенных на поверхности дна, и для решения других специальных задач привязку по месту результатов измерений необходимо осуществлять с точностью, не превышающей долей метра [2], а это требует определения места буксируемой гондолы с магнитометром с такой же точностью, т.е. не превышающей долей метра. Известные буксируемые магнитометры не вырабатывают информацию, позволяющую определять геодезические координаты буксируемой гондолы с магнитометром относительно судна буксировщика.
Таким образом, производить съемку ГМП с требуемой точностью и эффективностью с помощью известных способов съемки ГМП на акватории и буксируемого магнитометра не представляется возможным.
Задачей предлагаемого технического решения является повышение точности съемки ГМП на акватории буксируемым магнитометром.
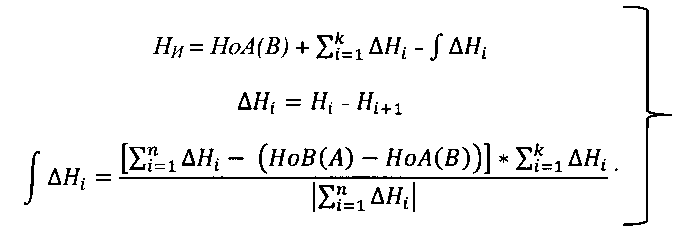
Поставленная задача достигается тем, что в способе съемки ГМП на акватории буксируемым магнитометром, включающим буксировку судном гондолы с магнитометром по заданным запланированным галсам, измерение при этом напряженности ГМП буксируемым магнитометром, определение геодезических координат места данных измерений, определение истинных значений напряженности ГМП, геодезических координат и их регистрацию, создают на буксируемой гондоле намагниченные импульсы с заданными параметрами, а на буксирующем судне измеряют напряженность магнитного поля при наличии и при отсутствии создаваемых намагниченных импульсов трехкомпонентным магнитометром, оси x,y,z которого ориентируют относительно диаметральной плоскости буксирующего судна и стабилизируют в горизонте, съемку ГМП на акватории осуществляют по замкнутым запланированным съемочным галсам, каждый съемочный галс начинают с прохождения гондолой с магнитометром через место расположения опорного магнитного пункта и заканчивают его прохождением гондолы с магнитометром на том же опорном магнитном пункте или на другом опорном магнитном пункте, фиксируют измеренную напряженность ГМП магнитометром в моменты прохождения гондолы через место расположения опорного магнитного пункта в начале и в конце съемочного галса, определяют вычислительным путем разность между смежными значениями измеренных напряжений ГМП вдоль съемочного галса, начиная с измеренного значения на опорном магнитном пункте, заканчивая измеренным значением напряженности ГМП на втором опорном магнитном пункте или же на начальном пункте, по полученным данным вычисляют истинные значения напряженности ГМП и их геодезические координаты на акватории съемки по формулам:
где i=1,2,…,n - порядковый номер значений выбранных напряженностей магнитного поля земли Hi, измеренных магнитометром 1, расположенных на съемочном галсе;
НоА, НоВ - эталонные значения напряженности магнитного поля Земли в опорных магнитных пунктах А и В;
k, n - число выбранных значений напряженности магнитного поля Земли Hi на отрезке съемочного галса, ограниченного опорными магнитными пунктами А или В и местом Е и опорными магнитными пунктами А и В соответственно;
где М - магнитный момент источника магнитных импульсов;
Hu - модуль полного вектора напряженности импульса магнитного поля, создаваемого источником, включающим вектор геомагнитного поля;
α,β,γ - углы между вектором импульса магнитного поля источника магнитных импульсов и осями x,y,z соответственно трехкомпонентного магнитометра.
Значение Hu вычисляются по формуле
Hu=Н1-Н2
где H1 - модуль полного вектора напряженности магнитного поля, измеренного на судне при наличии импульса магнитного поля источника объекта;
Н2 - модуль полного вектора напряженности магнитного поля, измеренного на судне при отсутствии импульса магнитного поля источника объекта.
Поставленная задача достигается также тем, что устройство для осуществления способа съемки ГМП на акватории буксируемым магнитометром, содержащее трехкомпонентный магнитометр, приемник космической навигационной системы, расположенные на борту буксирующего судна, магнитометр, расположенный в буксируемой гондоле, источник магнитных импульсов с заданными параметрами, расположенный в буксируемой гондоле, блок управления, блок определения истинных значений ГМП и их геодезических координат на акватории, при этом вход источника магнитных импульсов с заданными параметрами, выход трехкомпонентного магнитометра и судовой приемной навигационной системы соединен через блок управления с выходом блока определения истинных значений напряженности ГМП и их геодезических координат на акватории, выход которого соединен с входом регистратора.
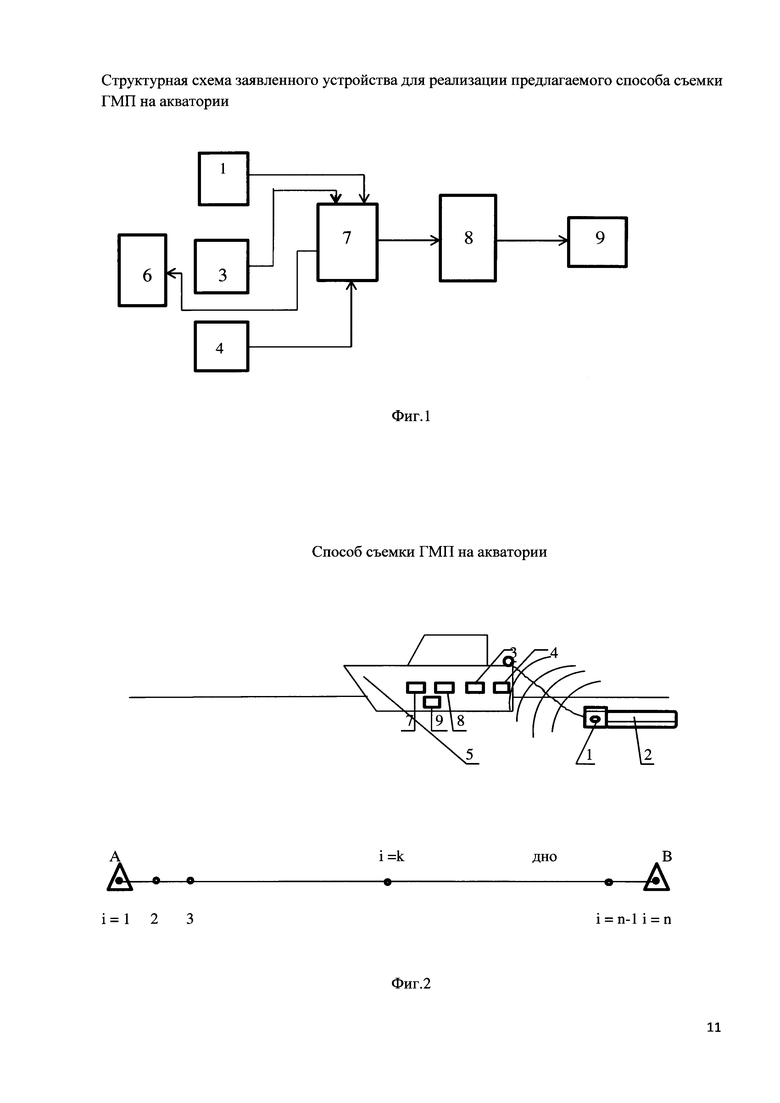
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема заявленного устройства для реализации предлагаемого способа съемки ГМП на акватории, на фиг .2 схематически показан предлагаемый способ съемки ГМП на акватории. Устройство для реализации предлагаемого способа съемки ГМП на акватории (фиг. 1) содержит: магнитометр 1, расположенный в буксируемой гондоле 2, трехкомпонентный магнитометр 3 и приемник космической навигационной системы 4, расположенные на буксирующем судне 5, источник магнитных импульсов 6 с заданными параметрами, расположенный в буксируемой гондоле 2, блок управления 7, блок 8 определения истинных значений напряженности ГМП и их геодезических координат на акватории, регистратор 9, при этом вход источника магнитных импульсов 6 с заданными параметрами соединен с блоком управления 7, выходы трехкомпонентного магнитометра 3, магнитометра 1, приемника космической навигационной системы 4 соединены через блок управления 7 с блоком 8 определения истинных значений напряженности ГМП и их геодезических координат, выход которого соединен с входом регистратора 9. Блок управления 7 может быть реализован на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразования электрических сигналов от нескольких датчиков, например микропроцессоров семейства AVR фирмы АТМЕС. В качестве приемника навигационной системы 4 может быть использован приемник космической навигационной системы типа «Глонасс» или GPS.
Блок 8 определения истинных значений напряженности ГМП и их геодезических координат на акватории может быть реализован, например, на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением. В качестве регистратора 9 может быть использована цифровая навигационная карта со специальным программным обеспечением.
Реализация заявленного способа съемки ГМП на акватории буксируемым магнитометром и устройства для его осуществления производится следующим образом. На акватории съемки ГМП буксируемым магнитометром создают в заданном месте (местах) опорный магнитный пункт А или два опорных магнитных пункта А и В, в которых с достаточно высокой точностью определяют напряженность ГМП и ее геодезические координаты путем установки в опорных магнитных пунктах магнитной вариационной станции, снабженной приемником космической навигационной системы типа «ГЛОНАСС» или GPS.
Съемку ГМП буксируемым магнитометром на акватории осуществляют по запланированным замкнутым съемочным галсам. То есть началом каждого съемочного галса является момент прохождения буксируемой гондолой через опорный магнитный пункт А, а конец съемочного галса является момент прохождения буксируемой гондолой через тот же опорный магнитный пункт А или через другой опорный магнитный пункт В. При движении буксируемой гондолы 2 по галсу измеряют магнитометром 1 напряженность ГМП, создают магнитные импульсы с заданными параметрами источников магнитных импульсов 6, измеряют на буксируемом судне 5 составляющие напряженности ГМП буксируемой гондолы 2 трехкомпонентным магнитометром 3, оси которого ориентируются относительно диаметральной плоскости буксируемого судна 5, и стабилизируют в горизонте, определяют геодезические координаты места расположения трехкомпонентного магнитометра 3 Хтм, Yтм, Zтм приемником космической навигационной системы 4.
По управляющим электрическим сигналам, выработанным блоком управления 7, электрические сигналы, пропорциональные напряженности ГМП с выхода магнитометра 1, пропорциональные составляющим напряженности магнитного поля буксируемой гондолы 2 с выхода трехкомпонентного магнитометра 3, пропорциональные геодезическим координатам с выхода приемника космической навигационной системы 4, через блок управления 7 поступают на вход блока определения истинных значений напряженности ГМП (НИ) и их геодезических координат 8 (Хиг, Yиг, Zиг) вычислительным путем по формулам:
где i=1,2,…,n - порядковый номер значений выбранных напряженностей магнитного поля земли Hi, измеренных магнитометром 1, расположенных на съемочном галсе;
НоА, НоВ - эталонные значения напряженности магнитного поля Земли в опорных магнитных пунктах А и В;
k, n - число выбранных значений напряженности магнитного поля Земли Hi на отрезке съемочного галса, ограниченного опорными магнитными пунктами А или В и местом Е и опорными магнитными пунктами А и В соответственно.
Оценку точности определения истинной напряженности магнитного поля Земли Hu по формуле (1) можно произвести следующим образом.
Анализ формулы (1) показывает, что если принять гипотезу, что слагаемые под знаком сумм в правых частях формулы (1) не отягощены постоянными и систематическими составляющими погрешностей, поскольку в приращениях ΔHi данные погрешности практически исключаются, а случайные погрешности малы по величине и имеют разные знаки, то при большом количестве измеряемых пунктах случайные погрешности приращения под суммами будут стремиться к нулю. Следовательно погрешность определения напряженности магнитного поля Земли Hu будет определяться на ее опорном магнитном пункте.
Определения напряженности магнитного поля Земли на ОМП возможно определить с требуемой точностью путем многократного измерения напряженности магнитного поля Земли в месте расположения ОМП вариационной магнитной станцией, а также применением известной [3, 1] теории уравнивания.
По результатам измерений вычисляют истинные геодезические координаты буксируемой гондолы 2 (Хиг, Yиг, Zиг) по формулам:
где М - магнитный момент источника магнитных импульсов-6
Hu - модуль полного вектора напряженности импульса магнитного поля, создаваемого источником-6, включающим вектор геомагнитного поля;
Хгм, Yгм, Zгм - геодезические координаты места источника магнитных импульсов;
α,β,γ - углы между вектором импульса магнитного поля источника магнитных импульсов-6 и осями x,y,z соответственно трехкомпонентного магнитометра-3.
Значение Hu вычисляются по формуле:
Hu=Н1-Н2
где H1 - модуль полного вектора напряженности магнитного поля, измеренного на судне при наличии импульса магнитного поля источника объекта;
Н2 - модуль полного вектора напряженности магнитного поля, измеренного на судне при отсутствии импульса магнитного поля источника объекта.
Значения cosα, cosβ, cosγ вычисляются по следующим формулам:
где коэффициенты A,B,C,D,E,G находят решением следующей системы уравнений

где Hux, Huy, Huz - составляющие напряженности импульса магнитного поля источника объекта на осях x,y,z соответственно: ΔHux, ΔHuy, ΔHuz - приращения Hux, Huy, Huz соответственно; Δх - приращение координаты х при движении судна в течение одного цикла измерения Δt.
Значения Hux, Huy, Huz, ΔHux, ΔHuy, ΔHuz вычисляют по формулам:
где  ,
,  ,
,  ,
,  ,
,  ,
,  - составляющие напряженности магнитного поля оси x,y,z, измеренные на судне при наличии магнитного поля источника объекта и при отсутствии магнитного поля источника;
- составляющие напряженности магнитного поля оси x,y,z, измеренные на судне при наличии магнитного поля источника объекта и при отсутствии магнитного поля источника;
 ,
,  ,
,  - приращения , , , соответственно,
- приращения , , , соответственно,
 ,
,  ,
,  - приращения , , , соответственно.
- приращения , , , соответственно.
Значение Δх вычисляется по формуле
Δx=Vx/Δt
где Vx - скорость судна по оси х.
Погрешность определения координат места объекта относительно судна предложенным способом можно вычислить по формуле:

где А - амплитуда напряженности импульсов источника магнитных импульсов 6, измеренная трехкомпонентным магнитометром 3, А=Hu;
ΔА - погрешность измерения А;
ΔM - погрешность определения М;
D - расстояние от буксируемого судна 5 до буксируемой гондолы 2;


ΔD - проекция D на ось х, например, для случая, когда М=100эм3; А=10-4э; ΔА=10-7э;
ΔМ=0,5%=0,5эм3; ΔD=100м; D=150м; Δх=1 м, погрешность определения координаты места составляет 0,51 м.
Таким образом, использование предложенного способа съемки ГМП на акватории буксируемым магнитометром и устройство для его осуществления обеспечивает по сравнению с прототипом более чем на порядок точность съемки ГМП на акватории.
Источники информации
1. Инструкция по эксплуатации морского буксируемого магнитометра МБМ. Издательство Главного управления навигации и океанографии МО СССР, Л., 1977.
2. Инструкция по морской магнитной съемке (ИМ-86). Издательство Главного управления навигации и океанографии МО СССР, Л., 1986 г.
3. Иванов М.М. Магнитная съемка океанов - В кн. Геомагнетизм, М., «Наука», 1966, с. 5-9.
4. Магниторазведка. Справочник геофизика. Под редакцией В.Е. Никитинского и Ю.С. Глебовского. М., «Наука»,1980, с. 176-179.
5. Патент SU №1073607 А1, 15.02.1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2008 |
|
RU2390803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
Изобретение относится к морским геофизическим исследованиям и может быть использовано для выполнения съемки геомагнитного поля (ГМП) на акватории с целью обследования характерных аномалий ГМП с повышенной точностью в интересах решения конкретных прикладных задач вооруженных сил и народного хозяйства. Сущность изобретения заключается в том, что на буксируемой гондоле создают намагниченные импульсы с заданными параметрами источников магнитных импульсов, а на буксируемом судне измеряют трехкомпонентным магнитометром, оси (х, у, z) которого ориентируют относительно диаметральной плоскости буксируемого судна, и стабилизируют в горизонте, напряженность магнитного поля при наличии и при отсутствии создаваемых намагниченных импульсов, съемку геомагнитного поля на акватории осуществляют по замкнутым запланированным съемочным галсам начинают каждый съемочный галс с прохождения гондолой с магнитометром через место расположения опорного магнитного пункта и заканчивают его прохождением гондолы с магнитометром на том же опорном магнитном пункте или на другом опорном магнитном пункте, фиксируют измеренную напряженность геомагнитного поля магнитометром в моменты прохождения гондолы через место расположения опорного магнитного пункта в начале и в конце съемочного галса, определяют вычислительным путем последовательно приращение между выбранными смежными значениями измеренных напряжений геомагнитного поля вдоль съемочного галса, начиная с измеренного значения на опорном магнитном пункте и заканчивая измеренным значением напряженности геомагнитного поля на втором опорном магнитном пункте или на начальном пункте, по полученным данным вычисляют истинные значения напряженности геомагнитного поля и их истинные геодезические координаты на акватории съемки. Технический результат - повышение точности съемки ГМП на акватории буксируемым магнитометром. 2 н.п. ф-лы, 2 ил.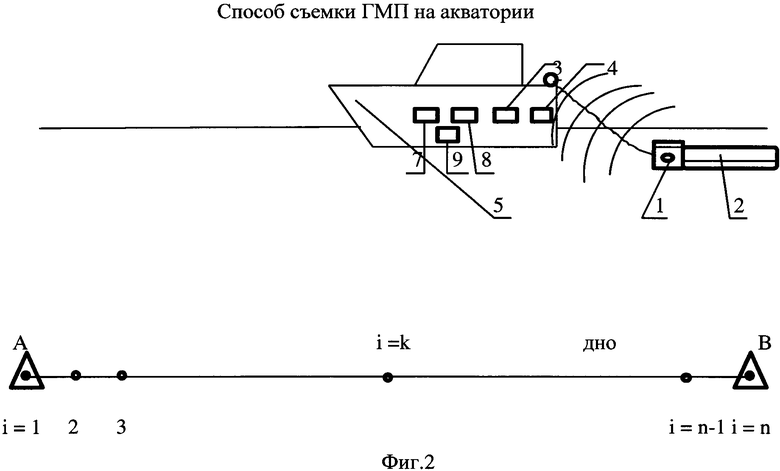
1. Способ съемки геомагнитного поля на акватории буксируемым магнитометром, включающий буксировку судном по заданным запланированным галсам гондолы с магнитометром, измерение при этом напряженности геомагнитного поля буксируемым магнитометром, определение геодезических координат места данных измерений, определение истинных значений напряженности геомагнитного поля, данных геодезических координат и их регистрацию, отличающийся тем, что на буксируемой гондоле создают намагниченные импульсы с заданными параметрами источников магнитных импульсов, а на буксируемом судне измеряют трехкомпонентным магнитометром, оси (x, y, z) которого ориентируют относительно диаметральной плоскости буксируемого судна и стабилизируют в горизонте, напряженность магнитного поля при наличии и при отсутствии создаваемых намагниченных импульсов, съемку геомагнитного поля на акватории осуществляют по замкнутым запланированным съемочным галсам, начинают каждый съемочный галс с прохождения гондолой с магнитометром через место расположения опорного магнитного пункта и заканчивают его прохождением гондолы с магнитометром на том же опорном магнитном пункте или на другом опорном магнитном пункте, фиксируют измеренную напряженность геомагнитного поля магнитометром в моменты прохождения гондолы через место расположения опорного магнитного пункта в начале и в конце съемочного галса, определяют вычислительным путем последовательно приращения между выбранными смежными значениями измеренных напряжений геомагнитного поля вдоль съемочного галса, начиная с измеренного значения на опорном магнитном пункте и заканчивая измеренным значением напряженности геомагнитного поля на втором опорном магнитном пункте или на начальном пункте, по полученным данным вычисляют истинные значения напряженности геомагнитного поля и их истинные геодезические координаты на акватории съемки соответственно, по формулам:
где i=1, 2, …, n - порядковый номер значений выбранных напряженностей магнитного поля земли Hi, измеренных магнитометром 1, расположенных на съемочном галсе;
HoA, HoB - эталонные значения напряженности магнитного поля Земли в опорных магнитных пунктах A и B;
k, n - число выбранных значений напряженности магнитного поля Земли Hi на отрезке съемочного галса, ограниченного опорными магнитными пунктами A или B и местом E и опорными магнитными пунктами A и B соответственно:

где M - магнитный момент источника магнитных импульсов;
Hu - модуль полного вектора напряженности импульса магнитного поля, создаваемого источником, включающим вектор геомагнитного поля;
α, β, γ - углы между вектором импульса магнитного поля источника магнитных импульсов и осями x, y, z соответственно трехкомпонентного магнитометра.
Значение Hu вычисляются по формуле:
Hu=H1-H2,
где H1 - модуль полного вектора напряженности магнитного поля, измеренного на судне при наличии импульса магнитного поля источника объекта;
H2 - модуль полного вектора напряженности магнитного поля, измеренного на судне при отсутствии импульса магнитного поля источника объекта.
2. Устройство для осуществления способа съемки геомагнитного поля на акватории буксируемым магнитометром, содержащее магнитометр, расположенный в гондоле, приемник навигационной системы, расположенный на буксирующем судне, блок управления, регистратор, отличающееся тем, что оно снабжено источником магнитных импульсов с заданными параметрами, расположенным в буксируемой гондоле, трехкомпонентным магнитометром, расположенным на буксирующем судне, на стабилизированной в горизонте платформе, оси x, y, z которого ориентированы относительно диаметральной плоскости буксирующего судна, блоком определения истинных значений напряженности геомагнитного поля и их истинных значений геодезических координат, при этом вход источника магнитных импульсов с заданными параметрами соединен с блоком управления, а выходы магнитометра, приемника навигационной системы, трехкомпонентного магнитометра соединены через блок управления с входом данного блока определения истинных значений напряженности геомагнитного поля и их истинных значений геодезических координат на акватории, выход которого соединен с входом регистратора.
| SU 1269672 A1, 10.01.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1979 |
|
SU786537A1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| US 20110031973 A1, 10.02.2011. | |||

