Изобретение относится к области геофизики, а более конкретно к гравиметрической разведки, и может быть использовано для выполнения морской гравиметрической съемки акватории континентального шельфа.
Как известно основными измеряемыми элементами гравитационного поля являются величины ускорения силы тяжести (УСТ) и вторые производные потенциала силы тяжести [1].
По характеру распределения гравиметрических пунктов на местности съемки подразделяют на площадные и профильные. Площадную съемку выполняют отдельными линиями (профилями) при изучении протяженных геологических объектов, при прокладке профилей повышенной точности для повышения качества интерпретации гравиметрических данных и при наблюдениях в труднодоступной местности, например в Антарктиде.
При гравиметрической разведке выполняют в основном площадные съемки.
Известен способ определения УСТ на движущемся объекте, включающий измерения УСТ гравиметром, неподвижно установленном на объекте-носителе, определение широты места, пути и абсолютной скорости объекта навигационным средством, вычисление по полученным данным поправки за эффект Этвеша [1].
Также известен способ определения УСТ в море, включающей измерение УСТ гравиметром, неподвижно установленным на подвижном основании, определение широты места, пути объекта и абсолютен скорости гравиметра навигационным средством, вычисление по полученным данным поправки на эффект Этвеша и искомого УСТ [2].
Известное устройство для осуществления способа содержит функционально соединенные и расположенные на стабилизированной в горизонте платформе чувствительную систему, блок управления, навигационное средство, вычислитель и регистратор.
Недостаток известных способов и устройства заключаются в том, что они имеют недостаточно высокую точность определения УСТ на движущемся объекте при выполнении морской гравиметрической съемки. Это объясняется тем, что при их использовании имеют место существенная погрешность  определения поправки на эффект Этвеша и существенная погрешность
определения поправки на эффект Этвеша и существенная погрешность  определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность
определения УСТ на движущемся объекте, обусловленная искажением гравитационного поля, которое возникает за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра, и скоростью изменения гравитационного поля, в котором движется объект. Погрешность  возникает при использовании известных способов и устройства из-за того, что поправку на эффект Этвеша вычисляют по формуле [1]
возникает при использовании известных способов и устройства из-за того, что поправку на эффект Этвеша вычисляют по формуле [1]

если Земля представлена в виде шара,
или по формуле

если Земля представляется в виде эллипсоида, где в формулах (1) и (2)
φ - широта места объекта,
α - путевой угол объекта,
R - радиус Земли,
а, е - большая полуось и эксцентриситет земного эллипсоида,
ω - угловая скорость вращения Земли,
VH - абсолютная скорость движения объекта-носителя гравиметра (абсолютная скорость движения чувствительной системы гравиметра).
VN, VE - соответственно, северная и восточная составляющие VH.
При определении УСТ в море на движущемся объекте траектория чувствительной системы гравиметра ρ как правило (в большинстве случаев), не совпадает с поверхностью моря или земного эллипсоида, так как поверхность моря или океана изменяется как во времени, так и в пространстве под воздействием тектонических, гидрометеорологических и других факторов. В результате этого радиус кривизны траектории движения гравиметра может принимать значения от А до ∞ и от -∞ до -А, а угол β между вектором абсолютной скорости гравиметра и плоскостью горизонта может принимать значения от 0 до β.
Погрешность поправки отвеса  из-за неучета угла β можно вычислить по формуле
из-за неучета угла β можно вычислить по формуле

Например, когда β=5° и ΔgЭТ=100 мГл, то погрешность может достигать 8,7 мГл. Погрешность поправки Этвеша , обусловленную использованием в формулах (1) и (2) вместо радиуса кривизны траектории движения объекта р радиуса Земли или большую полуось и эксцентриситет земного эллипсоида оценивают по формуле

Например, когда VH=9 м/с, ρ=106 м при R=6378155 м, погрешность составляет 6,8 мГл. При этом необходимо учесть, что принятое для расчета погрешности значение ρ не является экстремальным для существующей динамики объекта носителя, движущегося по морской поверхности или удерживающего постоянную глубину погружения при съемке. Так преобладающий период колебаний подводного объекта составляет 30-120 с, а амплитуда вертикальных перемещений 2..3 м (Попов Е.И. Определение силы тяжести на подвижном основании. - М.: Наука, 1967, с.178).
Отсюда следует, что значение ρ может достигать 3 км, что не учитывается в настоящее время при вычислении поправки Этвеша.
Погрешность М искажения гравиметрического поля, обусловленная наличием постоянной времени гравиметра и скорости движения носителя можно оценить следующим образом. Известно (Аппаратура и методы экспериментальных исследований по гравиметрии. - М.: Наука, 1965, с.103), что погрешность растет с увеличением постоянной времени гравиметра и скорости изменения гравитационного поля, в котором движется объект - носитель гравиметра, и ее можно вычислить по формуле

где α - скорость изменения гравитационного поля, в котором движется объект - носитель гравиметра,
VH - абсолютная скорость объекта-носителя гравиметра,
Т - постоянная времени низкочастотного фильтра гравиметра.
Например, когда α=0,8 мГл (средняя скорость изменения в средних широтах по меридиану УСТ (см. там же), VH=9,25 м/с (допустимая скорость движения объекта - носителя аппаратуры при проведении гравиметрической съемки в океане (Единые технические требования по Мировой гравиметрической съемке. Часть IУ. Инструкция по морской гравиметрической съемке (ИГ-78). - Л.: изд. ГУНиО МО СССР, 1979, с.6, 7), Т=3 мин или Т=6 мин - значения постоянной времени у современных гравиметров [1], то погрешность  составит 1,3 мГл или 2,6 мГл соответственно.
составит 1,3 мГл или 2,6 мГл соответственно.
Однако допустимая погрешность определения УСТ в океане в соответствии с действующими нормативными документами по гравиметрической съемке (Единые технические требования по Мировой гравиметрической съемке. Часть ТУ. Инструкция по морской гравиметрической съемке (ИГ-78). - Л.: изд. ГУНиОМО СССР, 1979, с.6, 7) не должна превышать 1 мГл. Кроме того, для определения абсолютного значения УСТ необходимо использование опорных гравиметрических пунктов (ОГП), что значительно уменьшает эффективность съемки в связи с необходимостью периодического перемещения объекта-носителя в район ОГП.
Известен также способ [3] определения ускорения силы тяжести на движущемся объекте, включающий измерение ускорения (α0) неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости VH чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения ускорения силы тяжести (g0), в котором дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение ускорения силы тяжести вычисляют по формуле

где ω - угловая скорость вращения Земли,
дополнительно измеряют вертикальную Vzi и горизонтальные Vxi, Vyi составляющие вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам


Измерение вертикальных и горизонтальных составляющих вектора абсолютной скорости чувствительной системы гравиметра и их последующий учет в результатах измерений по сравнению с известными способами [1, 2] повышает точность измерений в условиях спокойного моря. Однако недостаток данного способа выполнения гравиметрической съемки заключается в том, что он не обеспечивают необходимой точности определения УСТ на движущемся судне. Это объясняется тем, что при его использовании имеет место существенная погрешность измерения УСТ гравиметром, обусловленная наличием на движущемся судне ускорений, воздействующих на чувствительную систему гравиметра, возникающих в результате качки, пульсаций скорости движения и рыскания судна, которые имеют место в условиях волнения моря, изменчивости скорости и направления течений воды и ветра. Данная погрешность может достигать 5-7 мГал (Ситроев П.А. Гравиметрические исследования в Тихом океане. //Морские гравиметрические исследования. - М., 1982, с.70).
Известен также способ определения силы тяжести на морском опорном пункте [4], включающий измерения силы тяжести морскими гравиметрами на опорном пункте при прохождении его судном, движущимся последовательно по нескольким прямолинейным галсам, проложенным через опорный пункт, в котором для повышения точности определения силы тяжести измерения производят гравиметрами на прямых и обратных курсах по n-парам галсов с углом смещения 40-50 градусов в пределах опорной зоны с радиусом  , где mon - погрешность значения силы тяжести на опорном пункте, G - градиент силы тяжести в пределах опорной зоны, вычисляют опорное значение силы тяжести для гравиметров как среднеарифметическое из значений по n-парным прохождениям в точках, максимально приближенных к опорному пункту. Ввиду того, что измерения производят двумя противоположными ориентированными гравиметрами, а опорное значение силы тяжести и осредненный нуль-пункт вычисляют для каждой пары приборов, можно повысить точность определения силы тяжести. Однако технический результат достигается только в пределах рабочей зоны в точках, максимально приближенных к опорному пункту.
, где mon - погрешность значения силы тяжести на опорном пункте, G - градиент силы тяжести в пределах опорной зоны, вычисляют опорное значение силы тяжести для гравиметров как среднеарифметическое из значений по n-парным прохождениям в точках, максимально приближенных к опорному пункту. Ввиду того, что измерения производят двумя противоположными ориентированными гравиметрами, а опорное значение силы тяжести и осредненный нуль-пункт вычисляют для каждой пары приборов, можно повысить точность определения силы тяжести. Однако технический результат достигается только в пределах рабочей зоны в точках, максимально приближенных к опорному пункту.
Общим недостатком известных способов гравиметрической съемки и обработки ее результатов является то, что они не обеспечивают требуемое качество гравиметрической съемки акватории. Это объясняется тем, что при их использовании не выявляются локальные аномалии гравитационного поля Земли (ГПЗ), расположенные в полосе между смежными галсами, обусловленные поднятием (рельефом дна) между смежными галсами, а следовательно, не представляется возможным определить искомые значения УСТ в полосе между смежными галсами по значениям только лишь УСТ, вычисленным вдоль смежных галсов, так как отсутствует дополнительная информация о глубинах в полосе между смежными галсами.
Известно, что аномалии УСТ, обусловленные локальными поднятиями дна акватории, достигают 20-40 мГал при периодах порядка 20 - 40 км (см. Баграмянц В.О., Бережная Л.Т., Тележен М.А. О результатах гравиметрических исследований в Индийском океане в 7-ом рейсе НИС "Дмитрий Менделеев" / Морскме гравиметрические исследования. - М., 1982, с.123).
При выполнении гравиметрической съемки с междугалсовым расстоянием порядка 30 км в соответствии с требованием нормативного документа по морской гравиметрической съемки указанные локальные аномалии ГПЗ, расположенные в полосе между смежными галсами, не выявляются.
Кроме того, качество площадной морской гравиметрической съемки оценивается средней квадратической погрешностью интерполяции (см. например: Сорокин А.И. Теоретические основы гидрографических исследований. - Л.: ГУНиО МО, 1972. - 196 с.). Однако эта величина не в полной мере характеризует точность съемки. Чтобы решить ряд прикладных задач, таких как установление внешних границ подводной окраины материка, связь геологического строения континентального шельфа с геологическим строением прилегающей суши необходимо знать ковариацию погрешностей интерполяции значений ускорения УСТ не только между съемочными галсами в горизонтальной плоскости, но и вертикальной плоскости.
Задачей настоящего технического является повышение достоверности при измерениях величин гравитационного поля при выполнении съемки в морских условиях.
Поставленная задача решается за счет того, что в способе морской гравиметрической съемки, включающем размещение на подвижном носителе гравиметров, размещение опорных пунктов, оснащенных измерительной аппаратурой, в районе выполнения съемки, выполнение площадной или профильной съемки путем определения ускорения силы тяжести на движущемся объекте посредством измерения ускорения (α0) неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости VH чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения ускорения силы тяжести (g0), в котором дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение ускорения силы тяжести вычисляют по формуле

где ω - угловая скорость вращения Земли,
дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti. и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам
 , в котором в отличие от известных способов в районе съемки размещают опорные геофизические пункты, оснащенные баллистическими гравиметрами и прецизионными магнитометрами, посредством которых определяют опорные значения УСТ и векторы индукции геомагнитного поля, при этом опорные геофизические пункты размещают на морском дне, опорные геофизические пункты выполнены в виде автономных донных станций, снабженных гидроакустическим каналом связи, место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района, гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта, дополнительно выполняют анализ скелетных карт, путем анализа скелетных карта устанавливают границы континентального шельфа.
, в котором в отличие от известных способов в районе съемки размещают опорные геофизические пункты, оснащенные баллистическими гравиметрами и прецизионными магнитометрами, посредством которых определяют опорные значения УСТ и векторы индукции геомагнитного поля, при этом опорные геофизические пункты размещают на морском дне, опорные геофизические пункты выполнены в виде автономных донных станций, снабженных гидроакустическим каналом связи, место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района, гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта, дополнительно выполняют анализ скелетных карт, путем анализа скелетных карта устанавливают границы континентального шельфа.
Сущность заявляемого технического решения поясняется чертежами.
Фиг.1. Структурная схема устройства для реализации заявляемого способа.
Устройство содержит чувствительную систему гравиметра 1, установленную на стабилизированной платформе 2 и выход которой соединен через блок управления 3 с входом вычислителя 4, навигационное средство 5, предназначенный для определения широты места, путевого угла и вычисления абсолютной скорости чувствительной системы гравиметра 1 для определения угла β между вектором абсолютной скорости чувствительной системы гравиметра 1 и платформой 2, а также радиуса кривизны β траектории движения чувствительной системы гравиметра 1, выход которой через блок управления 3 подключен к входу вычислителя 4, выход которого подключен к регистратору 7, блок измерения абсолютной скорости 6.
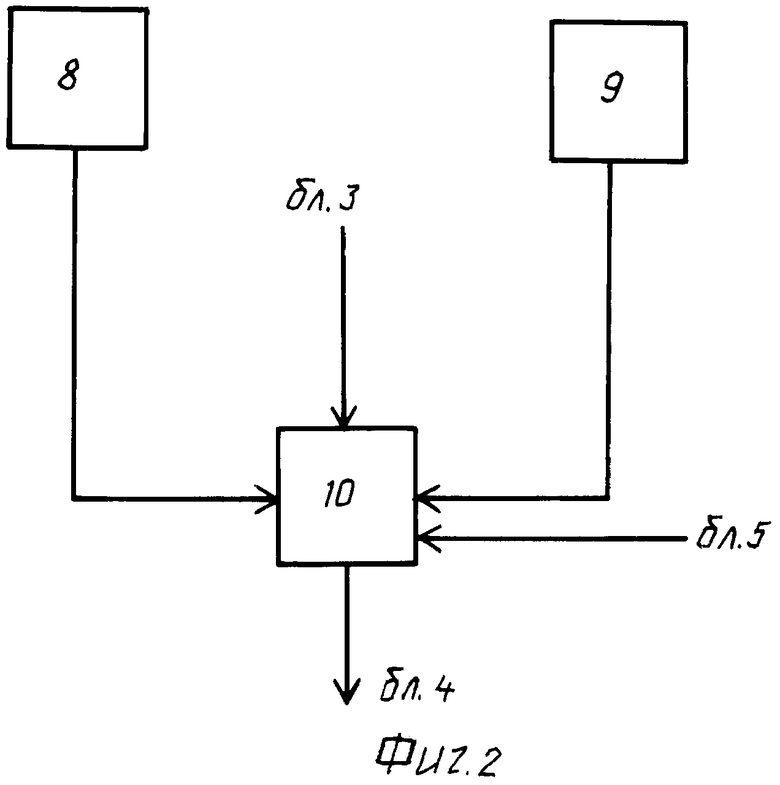
Фиг.2. Блок измерения абсолютной скорости 6 содержит трехкомпонентный измеритель абсолютной скорости 8, в качестве которого использован штатный судовой гидроакустический лаг, измеряющий скорость и угол дрейфа судна относительно морского дна по четырем лучам, измеритель времени 9 и вычислитель 10, реализующий формульные зависимости (7) и (8), к входу которого подключены выходы трехкомпонентного измерителя абсолютной скорости 8 и измерителя времени 9.
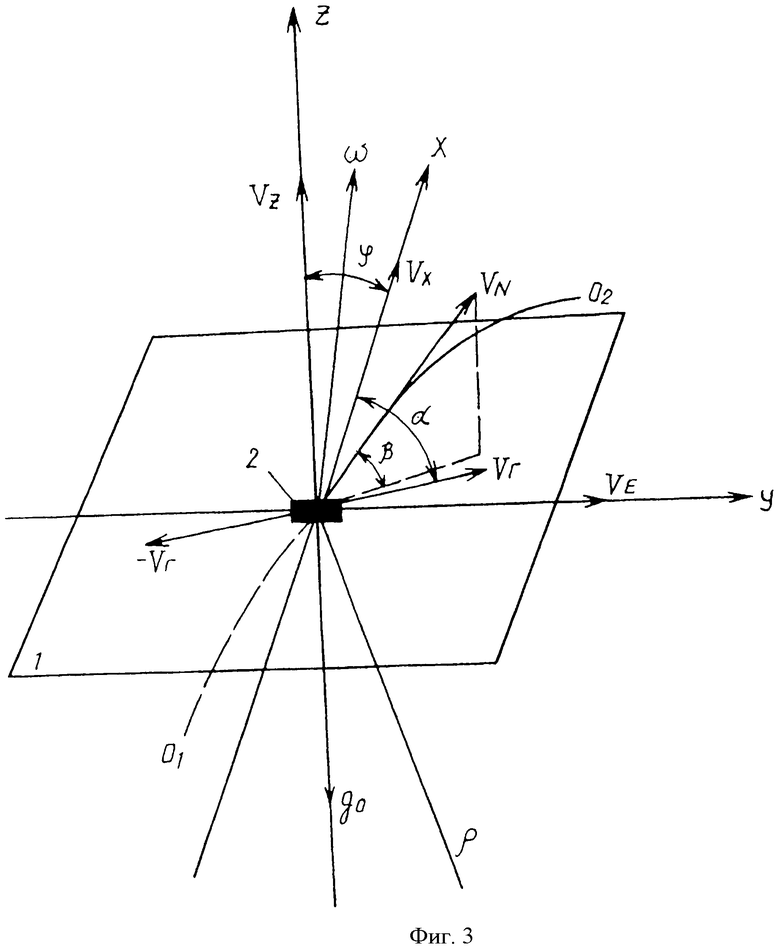
Фиг.3. Схема реализации способа, которая включает стабилизированную платформу 2, чувствительную систему гравиметра 1, ω - угловая скорость вращения Земли, α - путевой угол судна, φ - широта места, ρ - траектория чувствительной системы гравиметра, Vн -северная составляющая абсолютной скорости движения судна, Ve - восточная составляющая абсолютной скорости движения судна, β - угол между вектором абсолютной скорости чувствительной системы гравиметра 1 и плоскостью горизонта, Vн - абсолютная скорость судна, Vx, Vy - продольная и поперечная составляющие абсолютной скорости соответственно.
Фиг.4. Схема размещения опорных геофизических пунктов. На схеме позициями обозначены: космический аппарат 11, надводный носитель 12 измерительной аппаратуры, опорные геофизические пункты 13, выполненные в виде автономных донных станций.
Гравиметр представляет собой гравиметр, построенный по осесимметричной схеме, что позволяет исключить кросс-каплинг эффект, возникающий при волнении моря. Программное обеспечение технической реализации заявляемого способа позволяет использовать как морской гравиметр типа BGM, представляющего собой конструкцию принудительно уравновешенного акселерометра, в котором рабочая масса поддерживается в нулевом положении с помощью механизма обратной связи (струнный гравиметр), так и трехтензорный градиометр типа DFTG.
Стабилизированная платформа 2 представляет собой двухосную гироплатформу с коррекцией от акселерометров, что обеспечивает возможность выполнения измерений при возмущающих ускорениях до 150-200 Гал, с динамической погрешностью при небольших возмущающих ускорениях менее 1 мГал. При этом погрешность стабилизации не превышает 1 минуту, углы прокачки составляют 30-40 градусов, что обеспечивает возможность выполнения измерений при возмущающих ускорениях до 150-200 Гал.
Вычислитель 4 включает процессор Pentium 166 МГц, ОЗУ на 32 Мбайт, плату SVGA с памятью 1 Мбайт, дополнительную плату с двумя последовательными портами с FIFO памятью (UART 16550 - совместимая).
Блок управления 3 состоит из ПЗУ микрокоманд. ПЗУ управления выбором адреса, БИС микропрограммного управления, двух микропроцессоров, ПЗУ, ОЗУ, схемы формирования переносов, трех буферных регистров и магистралей адреса, микрокоманд, приема информации от судовых навигационных средств и предназначен для выработки и трансляции команд и информационных файлов с принимаемой от внешних источников информации, а также информации, находящейся в ПЗУ.
Определение УСТ на движущемся судне выполняется следующим образом. При движении объекта-носителя заданным курсом по управляющим электрическим сигналам, формирующимся в блоке управления 3, чувствительная система 2 вырабатывает электрические сигналы, пропорциональные УСТ без учета поправки Этвеша, которые поступают в вычислитель 4.
От навигационного средства 5 сигналы, пропорциональные абсолютной скорости VH пути а и широты места объекта-носителя, поступают в блок 6 измерения абсолютной скорости и вычислитель 4.
Блок 6 измерения абсолютной скорости вырабатывает электрические сигналы, пропорциональные углу β между вектором абсолютной скорости чувствительной системы 1 и плоскостью горизонта, а также радиусу кривизны ρ траектории ее движения, которые в виде пропорциональных им электрических сигналов поступают в вычислитель 4. По управляющим электрическим сигналам, формулирующимся в блоке управления 3, от трехкомпонентного измерителя абсолютной скорости 8 и измерителя времени 9 электрические сигналы, пропорциональные соответственно текущим значениям вертикальной Vz и горизонтальных Vx, Vy составляющих вектора абсолютной скорости движения чувствительной системы 1 и моментам времени ti их измерений в i-x точках траектории движения объекта (фиг.3), поступают в вычислитель 10, где по формулам (7) и (8) вычисляются значения ρ и β, которые поступают в вычислитель 4.
Каждый опорный геофизический пункт 13 представляет собой автономную донную станцию, оснащенную баллистическим гравиметром и прецизионным магнитометром, а также сейсмографами, модулем измерения гидрологических параметров и акустическим каналом связи с надводным носителем измерительной аппаратуры (судном).
Аналогом автономной донной станции являются устройства, приведенные в описаниях к патентам РФ №№2270464, 2294000. Место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района, которая может быть выполнена с надводного носителя измерительной аппаратуры, оснащенного, например, гидроакустическим комплексом типа «СОНИК-2», в состав которого входят гидролокатор бокового обзора, акустический профилограф, навигационные датчики, спутниковый приемоиндикатор, промерный эхолот и графический регистратор. Гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта.
Искомые значения УСТ gизмi опорных геофизических пунктах, расположенных вдоль съемочного галса на морском дне, вычисляются по формулам



где i=1, 2, …, n - порядковый номер расчетных значений выбранных УСТ в пунктах, расположенных на съемочном галсе;
g0A, g0B - эталонные значения УСТ опорных пунктов А и В соответственно;
k,n - число выбранных значений УСТ на отрезке съемочного галса, ограниченного пунктами А и В соответственно;
g - значение УСТ в пунктах, расположенных на съемочном галсе, вычисленное по формуле (9).
Искомые значения напряженности магнитного поля Земли Ниск в пунктах, расположенных вдоль съемочного галса, вычисляются по формулам


где i=1, 2, …, n - порядковый номер расчетных значений выбранных напряженностей магнитного поля Земли в пунктах, расположенных на съемочном галсе;
НoА, НoВ - эталонные значения напряженности магнитного поля Земли опорных пунктов А и В;
k, n - число выбранных значений напряженности магнитного поля Земли на отрезке съемочного галса, ограниченного опорными пунктами А или В и местом измерения и опорными пунктами А и В соответственно;
Hi - значение напряженности магнитного поля Земли в пунктах, расположенных на съемочном галсе.
Анализ формул (9)-(13) показывает, что, если принять гипотезу, что слагаемые под знаком сумм в правых частях не отягощены постоянными систематическими составляющими погрешностей, поскольку в приращениях данные погрешности практически исключаются, а случайные погрешности малы по величине и имеют разные знаки, то при большом количестве измерений между опорными пунктами, случайные погрешности приращения под суммами будут стремиться к нулю. Следовательно, погрешность определения УСТ и напряженности магнитного поля Земли будут определяться погрешностями их определения на опорных геофизических пунктах.
Координаты опорных геофизических пунктов определяются по пеленгам и расстояниям между судном и опорными геофизическими пунктами с использованием средств гидроакустического канала связи и известных алгоритмов определения места по пеленгам и дистанциям. Координаты судна определяются посредством спутниковой радионавигационной системой.
При гравиметрической съемки на акватории континентального шельфа геофизические опорные пункты, выполненные в виде автономных донных станций, размещают вдоль материкового склона и между береговой линий и материковым склоном. Условия работ на шельфе более благоприятны, чем в открытом море, так как позволяют создавать опорные пункты непосредственно в районе (береговые или донные), применять наиболее точные методы определения координат для учета переменной составляющей эффекта Этвеша. Наконец, относительно малые глубины шельфа могут быть измерены с погрешностью всего 0,5-1,0 м (А.П.Юзефович, Л.В.Огородова. Гравиметрия. - М.: Недра, 1980, с.226).
Как показывает опыт, при движении судна с постоянной скоростью и курсом фон возмущающих ускорений на расстоянии 50-100 км обычно меняется слабо. Поэтому если для какой-либо точки галса значение g заранее известно, то можно выявить влияние возмущающих ускорений и постоянную часть эффекта Этвеша как разность показаний гравиметра и известного значения g и исключить эту разность из показаний гравиметра на всем маршруте. Кроме того, местный морской пункт можно считать опорным, что позволит надежно контролировать нуль-пункт гравиметра и снизить точность требования к точности вывода цены деления гравиметра.
При профильном методе в районе предстоящей съемки определяют относительно берегового пункта несколько опорных морских профилей, выполняя измерения с донными гравиметрами, на подводной лодке или на судне. В последнем случае для достижения необходимой точности пунктов опорного профиля измерения производят при слабом волнении моря или выполняют повторные измерения. Пункты опорного профиля закрепляют буями и привязывают с помощью радиогеодезических систем или иных средств. Силу тяжести меду опорными пунктами профиля получают интерполированием. Съемку района осуществляют на параллельных галсах и контролируют ее секущими галсами. Наилучшие результаты получаются, если рядовые галсы начинаются и заканчиваются на опорных профилях. Так как погрешности привязки профилей к опорным (при небольшом градиенте силы тяжести и хорошем навигационном обеспечении) невелики, то невязки, возникающие при замыкании, можно отнести главным образом за счет систематических погрешностей, таких как погрешность цены деления, смещение нуль-пункта, изменение величины возмущающих ускорений. Эти погрешности возрастают в первом приближении пропорционально длительности измерений на профиле. Обработка морских гравиметрических наблюдений трудоемка из-за необходимости сглаживать показания гравиметра и вводить поправки.
Программа обработки включает вычисление отсчетов по гравиметрам, сглаживание отсчетов, введение поправок, вычисление силы тяжести и координат пунктов, оценку точности измерений, вычисление аномалий g=go+Δg, где g - значение силы тяжести на морском пункте, go - сила тяжести на опорном пункте, Δg - приращение силы тяжести.
Способ реализуется следующим образом.
Способ морской гравиметрической съемки, включает размещение на подвижном носителе гравиметров, размещение опорных геофизических пунктов, оснащенных измерительной аппаратурой, в районе выполнения съемки, выполнение площадной или профильной съемки, путем определения ускорения силы тяжести на движущемся объекте, посредством измерения ускорения (α0) неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости VH чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения ускорения силы тяжести (g0), в котором дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение ускорения силы тяжести вычисляют по формуле
,
где ω - угловая скорость вращения Земли,
дополнительно измеряют вертикальную Vzi и горизонтальные Vxi, Vyi составляющие вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам
.
В районе съемки размещают опорные геофизические пункты, оснащенные баллистическими гравиметрами и прецизионными магнитометрами, посредством которых определяют опорные значения УСТ и вектора индукции геомагнитного поля.
Опорные геофизические пункты размещают на морском дне.
Опорные геофизические пункты выполнены в виде автономных донных станций, снабженных гидроакустическим каналом связи.
Место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района.
Гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта.
В отличие от известных способов гравиметрической съемки в заявляемом способе размещение опорных пунктов непосредственно на морском дне позволяет выявить характер распределения магнитных аномалий в пределах границы океан - грунт, что позволяет построить так называемые скелетные карты с большей степенью достоверности, что особенно важно для выполнении гравитационной съемки на континентальном шельфе.
Известно [см. например: O.K.Леонтьев. Морская геология. - М.: Высшая школа. 1982, с.25], что континентальным шельфам свойственно сложное построенное магнитного поля, которое отличается разнообразием направлений и очертаний аномальных ареалов, а также резкими изменениями аномалий от одного места к другому месту.
В пределах переходных зон отчетливо различаются два вида аномальных полей - изометрические небольшой интенсивности - около 80-160 мА/м и полосовые высокой интенсивности (470-550 мА/м). Первые из них характеризуют котловинные участки, вторые распространены в пределах развития островных дуг и глубоководных желобов, а также вдоль бровок материковых склонов. Данное обстоятельство позволяет построить скелетные карты магнитных аномалий в исследуемом районе.
При этом ввиду того, что гравиметрическое поле на континентальном шельфе принципиально не отличается от прилегающих пространств наземных платформенных равнин, но вдоль материкового склона и материкового подножия отмечаются отрицательные аномалии Фая, то по анализу скелетных карт можно установить границы континентального шельфа.
Реализация заявляемого способа технической трудности не представляет, так как реализуется посредством штатных судовых средств измерения и имеющих промышленное применение гравиметров.
Источники информации
1. Юзефич А.П., Огородова Л.В. Гравиметрия. - М.: Недра, с.160-164.
2. Авторское свидетельство SU №1419347.
3. Патент RU №1760875.
4. Патент RU №2324207.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |

Изобретение относится к области геофизики и может быть использовано при проведении гравиметрической и магнитной съемок на акваториях. Сущность: на подвижном носителе размещают гравиметры, а на опорных геофизических пунктах - баллистические гравиметры и прецизионные магнитометры. Опорные геофизические пункты представляют собой автономные донные станции, снабженные гидроакустическим каналом связи. Место установки донных станций выбирают с учетом рельефа дна исследуемого района. Определяют опорные значения ускорения силы тяжести, напряженности и вектора индукции магнитного поля Земли. Гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт. Вычисляют значения ускорения силы тяжести и модуля вектора индукции геомагнитного поля в точке измерения как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта. Дополнительно выполняют анализ скелетных карт для установления границ континентального шельфа. Технический результат: повышение достоверности результатов измерения гравитационного поля. 4 ил.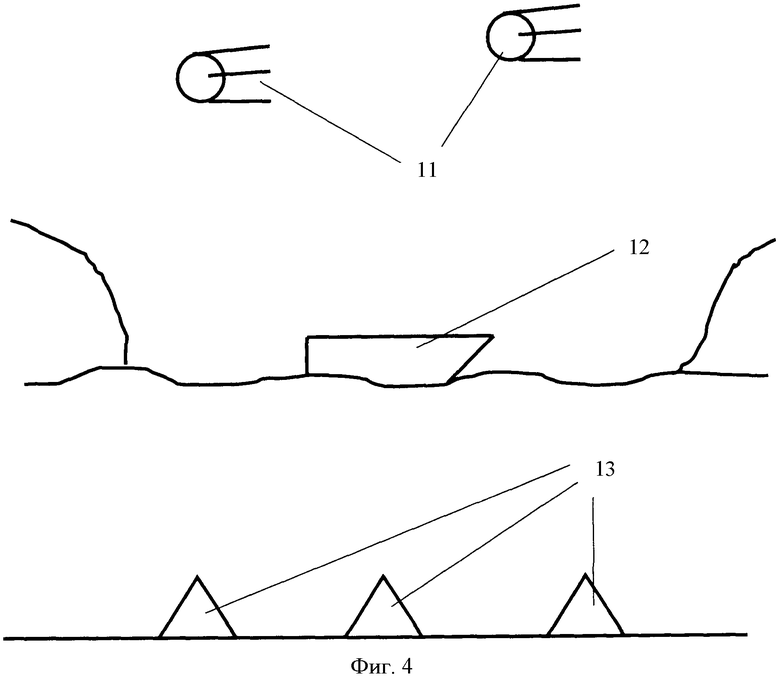
Способ морской гравиметрической съемки, включающий размещение на подвижном носителе гравиметров, размещение опорных геофизических пунктов, оснащенных измерительной аппаратурой, в районе выполнения съемки, выполнение площадной или профильной съемки путем определения ускорения силы тяжести (УСТ) на движущемся объекте посредством измерения ускорения (α0) неподвижным относительно объекта гравиметром (акселерометром по вертикали), определение широты места φ, путевого угла α, абсолютной скорости VH чувствительной системы гравиметра навигационным средством и вычисление по полученным данным искомого абсолютного значения УСТ (g0), в котором дополнительно определяют угол β между вектором абсолютной скорости чувствительной системы гравиметра и плоскостью горизонта, радиус кривизны ρ траектории движения чувствительной системы, а искомое абсолютное значение УСТ вычисляют по формуле  , где ω - угловая скорость вращения Земли, дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам:
, где ω - угловая скорость вращения Земли, дополнительно измеряют вертикальную Vzi и горизонтальные составляющие Vxi, Vyi вектора абсолютной скорости чувствительной системы гравиметра в моменты времени ti и t(i+1) в точках траектории движения чувствительной системы, а значения β и ρ вычисляют по формулам:  ,
,  , отличающийся тем, что в районе съемки размещают опорные геофизические пункты, оснащенные баллистическими гравиметрами и прецизионными магнитометрами, посредством которых определяют опорные значения УСТ и напряженности геомагнитного поля Земли, при этом опорные геофизические пункты размещают на морском дне, опорные геофизические пункты выполнены в виде автономных донных станций, снабженных гидроакустическим каналом связи, место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района, гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта, дополнительно выполняют анализ скелетных карт, путем анализа скелетных карт устанавливают границы континентального шельфа.
, отличающийся тем, что в районе съемки размещают опорные геофизические пункты, оснащенные баллистическими гравиметрами и прецизионными магнитометрами, посредством которых определяют опорные значения УСТ и напряженности геомагнитного поля Земли, при этом опорные геофизические пункты размещают на морском дне, опорные геофизические пункты выполнены в виде автономных донных станций, снабженных гидроакустическим каналом связи, место установки автономных донных станций определяют по результатам съемки рельефа дна исследуемого района, гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный геофизический пункт, а искомые значения УСТ и модуля вектора индукции геомагнитного поля в точке измерения вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорного геофизического пункта, дополнительно выполняют анализ скелетных карт, путем анализа скелетных карт устанавливают границы континентального шельфа.
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| US 2004000910 А1, 01.01.2004. | |||

