Изобретение относится к области магнитометрии, точнее к методам компонентных измерений магнитного поля, и предназначено для измерений компонент геомагнитного поля.
Известен способ определения компонент векторной индукции (ВМИ) с помощью абсолютных модульных преобразователей [1] включающий преобразование измеряемого поля созданием дополнительных полей заданной ориентации, поочередно компенсирующих неизмеряемые компоненты. Использование этих методов на борту движущихся носителей (объектов) предусматривает последовательное измерение компонент в разных точках траектории носителя, что приводит к погрешностям компонентной съемки геомагнитного поля.
Известен способ определения компонент ВМИ, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя до совмещения направления преобразования с коэффициентом, не равным двум другим, с направлением измеряемой компоненты, а любого другого направления преобразователя с плоскостью, в которой находится первое направление и ВМИ, измерение модулей ВМИ измеряемого и преобразованного полей с последующим определением компонент ВМИ [2]
Недостатком этого способа является то, что подобное измерение подразумевает наличие двух модульных преобразователей, установленных в двух точках. При этом, если носитель имеет собственное магнитное поле, то точность измерения снижается за счет наличия градиента магнитного поля между точками установки преобразователей.
C целью повышения точности в способе определения компонент вектора магнитной индукции, включающем линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
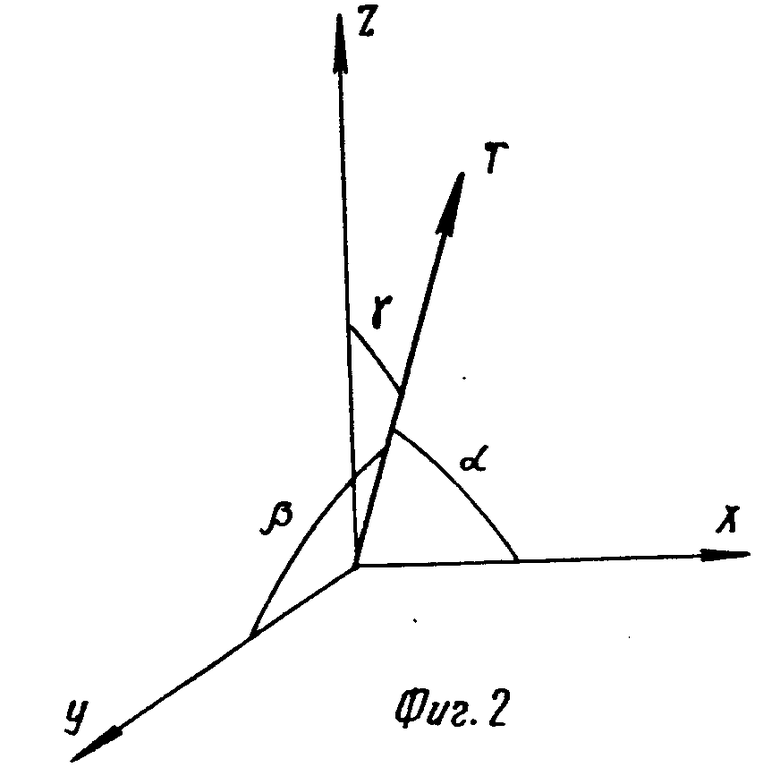
На фиг. 1 представлена векторная диаграмма, поясняющая последовательность операций способа; на фиг. 2 поясняется принцип определения компонент в заданных координатах Х, У, Z; на фиг. 3 приводится блок-схема устройства, реализующего способ измерения компонент ВМИ.
Устройство содержит модульный преобразователь 1, эллипсоидальную (сфероидальную) оболочку 2, измеритель 3, индикатор 4 положения направления преобразования (с коэффициентом Р1) относительно направления ВМИ измеряемого поля, систему 5 ориентации в горизонтальной плоскости, систему ориентации в вертикальной плоскости 6.
Способ осуществляют следующим образом. Вращая эллипсоидальную (сфероидальную) оболочку 2 в горизонтальной плоскости, с помощью системы ориентации 5 находят положение, при котором значение преобразованного поля, измеренное модульным преобразователем 1, будет максимально (минимально). Измеритель 3 определяет это значение, а индикатор положения 4 фиксирует положение оболочки 2 в момент совпадения выбранного направления преобразования с вертикальной плоскостью, содержащей ВМИ измеряемого поля. Затем, вращая оболочку 2 с помощью системы ориентации 6, добиваются совпадения этого направления преобразования с направлением измеряемого поля. Индикатор 4 по максимальному (минимальному) значению модуля ВМИ преобразованного поля определяет совпадение направления оси, вдоль которой коэффициент преобразования максимален (минимален). Зафиксировав значение ВМИ преобразованного поля в момент совпадения выбранного направления преобразования с направлением ВМИ, находят модуль ВМИ измеряемого поля. Определив углы α,β,γ (см. фиг. 2) между направлением, совпадающим с направлением ВМИ преобразованного поля и осями координат, по которым измеряются компоненты поля, определяют их величины.
Из фиг. 1 видно, что при совмещении выбранного направления преобразования (коэффициент Р1) с вертикальной плоскостью, в которой лежит ВМИ измеряемого поля, получим
где Т модуль вектора ВМИ.
Если теперь совместить в этой вертикальной плоскости направление преобразования с направлением измеряемого поля (J=0), получим
T1=P1T.
Таким образом, по измерению ВМИ преобразованного поля Т1, т.е. по его максимальному (Р1>P2≥P3) или минимальному (Р1<P2≅P3) значениям определяется модуль ВМИ измеряемого поля, где Р1, P2, P3 коэффициенты преобразования по формуле
Затем определяют значения компонент ВМИ по формулам
X = Tcosα, Y = Tcosβ, Z = Tcosγ,
где α,β,γ углы между направлением ВМИ измеряемого поля и направлениями осей координат. ЫЫЫ2


Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, отличающийся тем, что, с целью повышения точности, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
Способ определения компонент вектора магнитной индукции, включающий линейное преобразование измеряемого поля по трем взаимно перпендикулярным направлениям с заданными коэффициентами преобразования, из которых хотя бы один по величине не равен двум другим, ориентацию преобразователя и определение величины модуля вектора магнитной индукции преобразованного поля, отличающийся тем, что, с целью повышения точности, ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с вертикальной плоскостью, содержащей вектор магнитной индукции, затем ориентируют преобразователь до совмещения направления с коэффициентом преобразования, не равным двум другим, с направлением вектора магнитной индукции, после чего определяют углы между направлением вектора магнитной индукции и направлениями определяемых компонент.
| Афанасьев Ю.В | |||
| и др | |||
| Магнитометрические преобразователи, приборы, установки, "Энергия", 1972, с | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
