Предлагаемое изобретение относится к сменным грузозахватным приспособлениям и может быть использовано в составе любого грузоподъемного средства для подъема многотоннажных ферромагнитных грузов, например, для одновременного подъема и перемещения нескольких труб большого диаметра, используемых для строительства газопроводов.
Известно грузоподъемное устройство, содержащее корпус, размещенные в нем подвижные и неподвижные магнитные блоки, механизм управления подвижным магнитным блоком, включающим в себя рычаг, связанный с зубчатым сектором, и элемент для соединения с грузоподъемным механизмом (см. Авторское свидетельство СССР №821379, кл. В66С 1/04, 1975).
Недостатком этого устройства является низкая надежность, невозможность автоматизации процесса.
Известно грузоподъемное устройство, содержащее корпус, размещенные в нем подвижные и неподвижные магнитные блоки, механизм управления подвижным магнитным блоком, включающим в себя пневмоцилиндр и систему подачи в него сжатого воздуха для включения и выключения магнита (см. www.sav-magnet.ru).
Недостатками этого устройства являются его большие габариты, низкое быстродействие на включение - выключение, возникновение ударных нагрузок при переключениях.
Наиболее близким по технической сущности к предлагаемому является грузозахватное устройство, содержащее корпус, размещенные в нем подвижные и неподвижные магнитные блоки, механизм управления подвижным магнитным блоком, включающим в себя рычаг, связанный с зубчатым сектором, и элемент для соединения с грузоподъемным механизмом, при этом зубчатый сектор жестко закреплен на одном плече рычага, жестко соединенного другим плечом с элементом для соединения с грузоподъемным механизмом, и выполненного с выступом для взаимодействия с подвижным магнитным блоком, а устройство снабжено шестернями, одна из которых закреплена на оси рычага, а две других на общей оси с возможностью зацепления одной из них с первой шестерней, а другой - с сектором (см. Авторское свидетельство СССР №1294745, кл. В66С 1/04, 1987).
Недостатками этого грузозахватного устройства являются его большие габариты, а также большая масса, необходимая для его надежного срабатывания, низкая надежность из-за большого числа элементов, наличие механических нагрузок на изделие (возможно повреждение изделия), невозможность автоматизации процесса.
Техническим результатом предлагаемого изобретения является повышение производительности грузоподъемного устройства за счет уменьшения массы грузозахватного приспособления с одновременным повышением его надежности, плавности хода при переключении, высокая точность позиционирования.
Поставленный технический результат достигается тем, что в грузозахватном устройстве, содержащем корпус, размещенные в нем подвижные и неподвижные магнитные блоки, механизм управления подвижным магнитным блоком, в качестве механизма управления подвижным магнитным блоком использован мотор-редуктор с передачей винт-гайка с вращающейся или гайкой, или винтом, размещенной на выходе мотор-редуктора, при этом при вращении гайки на выходе мотор-редуктора удаленный конец винта от мотор-редуктора жестко закреплен на торцевой поверхности подвижного магнитного блока, при этом при вращении винта на выходе мотор-редуктора жестко закреплена гайка на подвижном магнитном блоке, дополнительно содержит блок управления мотор-редуктором и концевые датчики-выключатели крайних положений подвижных магнитных блоков, при этом при вращающейся гайке удаленный конец винта от мотор-редуктора жестко закреплен на пересечении диагоналей прямоугольной торцевой части подвижного магнитного блока, при этом при вращающемся стержне в теле подвижного магнитного блока со стороны мотор-редуктора выполнен глухой паз, на входе которого жестко установлена гайка, при этом глухой паз в теле подвижного магнита выполнен на пересечении диагоналей прямоугольной торцевой части подвижного магнитного блока, при этом устройство может дополнительно содержать датчики промежуточных положений подвижного магнитного блока.
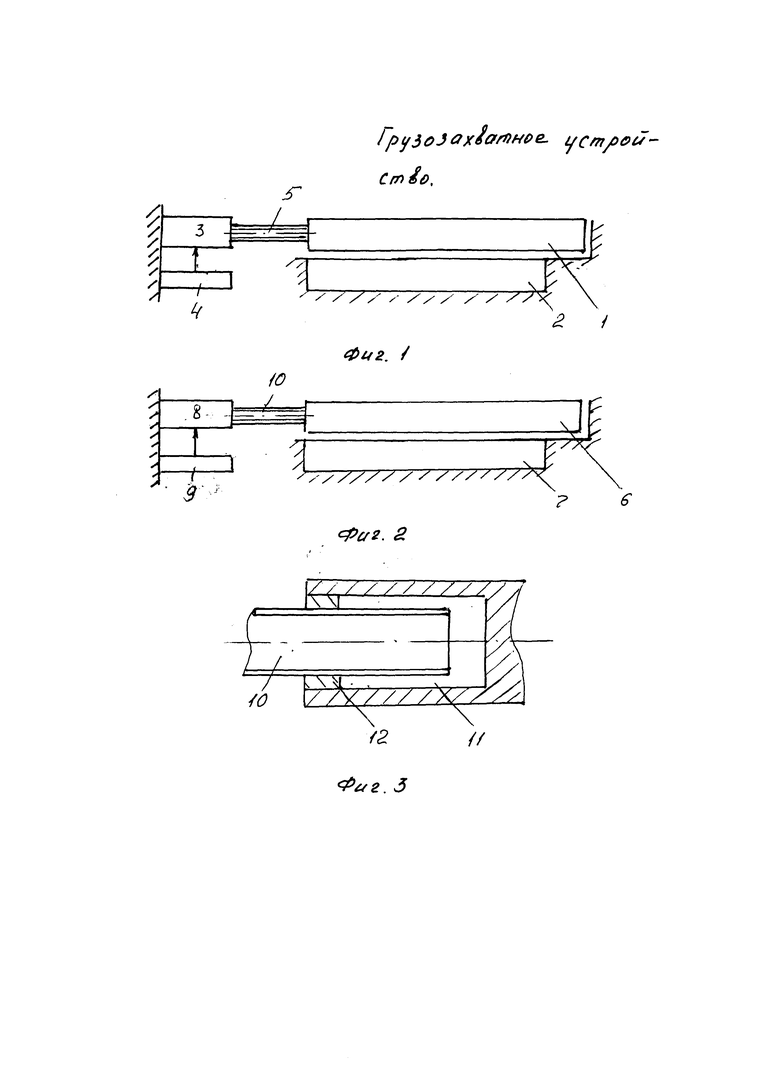
На фиг. 1 схематично представлено предлагаемое грузозахватное устройство с вращающейся гайкой.
Грузозахватное устройство содержит корпус с размещенными в нем подвижными 1 и неподвижными 2 магнитными блоками, механизм управления подвижным магнитным блоком. В качестве механизма 3 управления подвижным магнитным блоком 1 использован мотор-редуктор с передачей винт-гайка с вращающейся гайкой, размещенной на выходе мотор-редуктора 3 (гайка передачи винт-гайка на фиг. 1 не показана). Кроме этого, дополнительно содержит блок 4 управления мотор-редуктором 3 и концевые датчики-выключатели крайних положений подвижного магнитного блока (на чертеже датчики положений винта не показаны). При этом удаленный конец винта 5 от мотор-редуктора 3 жестко закреплен на торцевой поверхности подвижного магнитного блока 1, предпочтительно на пересечении диагоналей прямоугольной торцевой части (этот вариант закрепления винта 5 на фиг. 1 не показан).
На фиг. 2 схематично представлено предлагаемое грузозахватное устройство с вращающимся винтом; на фиг. 3 показано глухое отверстие с размещенным в нем частью винта.
Грузозахватное устройство содержит корпус с размещенными в нем подвижным 6 и неподвижным 7 магнитными блоками, механизм управления подвижным магнитным блоком. В качестве механизма управления подвижным магнитным блоком использован мотор-редуктор 8 с передачей винт-гайка с вращающимся винтом, размещенным на выходе мотор-редуктора 8.
Кроме этого, грузозахватное устройство дополнительно содержит блок 9 управления мотор-редуктором 8 и концевые датчики-выключатели крайних положений подвижного магнитного блока (на чертеже датчики положений винта не показаны). Позицией 10 обозначен винт, позицией 11 - глухое отверстие, позицией 12 - гайка передачи винт-гайка. Глухое отверстие 11 выполнено в теле подвижного магнита 6. Глухой паз в теле подвижного магнита 6 выполнен на пересечении диагоналей прямоугольной торцевой части подвижного магнитного блока
Каждый из магнитных блоков включает в себя чередующиеся плоские постоянные магниты и магнитомягкие пластины-полюсники.
Подвижный магнитный блок 1 (6) имеет возможность перемещаться в соответствии с возможностью преобразования вращательного движения или гайки (см. фиг. 1, или винта 10 (см. фиг. 2, фиг. 3).
Грузозахватное устройство может содержать датчики промежуточных положений подвижного магнитного блока (на чертежах не показаны).
Грузозахватное устройство работает следующим образом.
При установке на ферромагнитную поверхность магнитная система выключена. Для ее включения включают мотор-редуктор 3 (8). Вращение или гайки по фиг. 1, или винта по фиг. 2, фиг. 3 изменяет положение подвижных магнитных блоков 1 (6). Груз захватывается и он готов к транспортированию.
При установке груза на месте разгрузки вновь изменяют положение подвижных блоков 1 (6). Магнитная система выключается и может быть начат следующий цикл транспортировки.
Простота конструкции, высокая надежность, высокая точность перемещений, малые габариты и вес грузозахватного устройства являются достоинством и преимуществом предлагаемого технического решения по сравнению с прототипом.
Выпуск предлагаемого грузозахватного устройства начат в январе месяце 2015 года обществом с ограниченной ответственностью «Кировский завод электромагнитов «ДимАл» (ООО «КЗЭ «ДимАл»).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СЛИТКОВ | 2006 |
|
RU2309889C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| ПОВОРОТНАЯ ГОЛОВКА ЗАХВАТНОГО УСТРОЙСТВА ДЛЯ ГРУЗОВ | 1995 |
|
RU2148549C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| ЭЛЕКТРОМОБИЛЬ | 2008 |
|
RU2400378C2 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2653725C1 |
| Грузозахватное устройство | 1990 |
|
SU1735195A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2572544C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
Изобретение относится к сменным грузозахватным приспособлениям. Грузозахватное устройство содержит корпус с подвижными и неподвижными магнитными блоками, механизм управления подвижным блоком. В качестве механизма управления подвижным магнитным блоком использован мотор-редуктор с передачей винт-гайка, винт или гайка которого размещены на выходе мотор-редуктора. Устройство дополнительно содержит блок управления мотор-редуктором и концевые датчики-выключатели крайних положений подвижных магнитных блоков. Достигается повышение производительности грузоподъемного устройства за счет уменьшения массы грузозахватного приспособления с одновременным повышением его надежности. 4 з.п. ф-лы, 3 ил.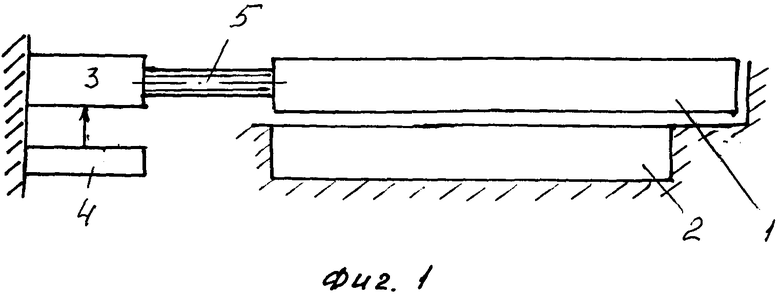
1. Грузозахватное устройство, содержащее корпус, размещенные в нем подвижные и неподвижные магнитные блоки, механизм управления подвижным магнитным блоком, отличающееся тем, что в качестве механизма управления подвижным магнитным блоком использован мотор-редуктор с передачей винт-гайка с вращающейся или гайкой, или винтом, размещенной на выходе мотор-редуктора, при этом при вращении гайки на выходе мотор-редуктора удаленный конец винта от мотор-редуктора жестко закреплен на торцевой поверхности подвижного магнитного блока, при этом при вращении винта на выходе мотор-редуктора гайка жестко закреплена на подвижном магнитном блоке, дополнительно содержит блок управления мотор-редуктором и концевые датчики-выключатели крайних положений подвижных магнитных блоков.
2. Грузозахватное устройство по п.1, отличающееся тем, что при вращающейся гайке удаленный конец винта от мотор-редуктора жестко закреплен на пересечении диагоналей прямоугольной торцевой части подвижного магнитного блока.
3. Грузозахватное устройство по п.1, отличающееся тем, что при вращающемся стержне в теле подвижного магнитного блока со стороны мотор-редуктора выполнен глухой паз, на входе которого жестко установлена гайка.
4. Грузозахватное устройство по п.3, отличающееся тем, что глухой паз в теле подвижного магнита выполнен на пересечении диагоналей прямоугольной торцевой части подвижного магнитного блока.
5. Грузозахватное устройство по п.1, отличающееся тем, что дополнительно содержит датчики промежуточных положений подвижного магнитного блока.
| Грузозахватное устройство | 1984 |
|
SU1294745A1 |
| Вентильно-конденсаторный блок | 1958 |
|
SU116137A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СЛУЖБ ДЛЯ КОНВЕРГЕНТНЫХ СИСТЕМ ПЕРЕДАЧИ СООБЩЕНИЙ | 2007 |
|
RU2440686C2 |

