Изобретение относится к подъемно-транспортному оборудованию, а именно к грузозахватным устройствам.
Известны магнитные и электромагнитные захватные устройства (Ю.П. Лапкин, А. Р. Малкович. Перегрузочные устройства. Л.: Машиностроение, 1964 г., рис. 4.23 и 4.32).
Данные устройства не позволяют получить технического результата, достигаемого при осуществлении заявляемого изобретения, а именно расширения функциональных возможностей путем обеспечения ориентации захватного устройства относительно транспортируемого груза.
Известно грузозахватное устройство в виде подъемного электромагнита типа "М" (М.П. Александров. Подъемно-транспортные машины. М.: Высшая школа, 1979 г. , с 92, 93), содержащее грузонесущий механизм, включающий электромагнит и два подъемных магнита, состоящих из стального корпуса, отлитого из малоуглеродистой стали марки 25Л-I, внутри которого помещены катушки магнита, защищенные снизу от повреждения листом из марганцовистой стали или латуни, обладающей магнитной проницаемостью, и элемент навешивания на крюк грузоподъемного устройства, выполненный в виде цепей.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются: наличие грузонесущего механизма и элемента навешивания на крюк грузоподъемного устройства.
Данное устройство не позволяет получить технического результата, достигаемого при осуществлении заявляемого изобретения, а именно расширения функциональных возможностей путем обеспечения ориентации захватного устройства относительно транспортируемого груза.
Известна головка поворотная с цилиндрическим редуктором для 5-ти тонного козлового крана (Паспорт и инструкция по эксплуатации. - М.:Транспорт, 1982 - 9 с. рис.), используемая совместно с грузозахватными механизмами, например автостроп (Автостроп системы ЦНИИ-ХИИТ, паспорт и инструкция по эксплуатации. - М.:Транспорт, 1982 - 38 с., рис.), и содержащая грузонесущий механизм в виде грузонесущего элемента и гнезда установки грузозахватного устройства, а также элемент навешивания. При этом грузонесущий элемент выполнен в виде вала грузонесущего, цапфы с двумя блоками, упорного стакана, стопорного кольца, шестерни, насаженной на вал, наружного упорного кольца, упорных подшипников, редуктора электродвигателя, а гнездо установки грузозахватного устройства выполнено в виде Т-образного отверстия в нижнем утолщенном конце вала.
Признаками, совпадающими с существенными признаками заявляемого изобретения, являются: наличие грузонесущего механизма для взаимодействия с грузозахватным устройством, включающим в себя наружное подвижное кольцо и элемент для навешивания на крюк грузоподъемного устройства.
Данная поворотная головка не позволяет получить технического результата, достигаемого при осуществлении заявляемого изобретения, а именно расширения функциональных возможностей путем обеспечения ориентации поворотной головки относительно транспортируемого груза.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании захватного устройства для грузов с такой поворотной головкой, которая обеспечивает широкие функциональные возможности по захвату, ориентации и транспортировке груза.
При этом технический результат состоит в расширении функциональных возможностей устройства путем обеспечения ориентации поворотной головки относительно транспортируемого груза.
Технический результат достигается тем, что в поворотной головке захватного устройства для грузов, содержащей грузонесущий механизм для взаимодействия с грузозахватным устройством, включающий в себя наружное подвижное кольцо и элемент для навешивания на крюк грузоподъемного устройства, отличающаяся тем, что грузонесущий механизм содержит полый цилиндр, выполненный с фланцем, имеющим кольцевой выступ, и днищем с резьбовым отверстием, винт, выполненный со ступенчатым фланцем, кольцевой выемкой и сквозным отверстием и установленный в резьбовом отверстии днища полого цилиндра, нижнюю и верхнюю рамы, по меньшей мере две пары водил, одни из которых жестко закреплены на верхней раме и размещены в продольных отверстиях других водил, размещенных в прорезях нижней рамы, стакан, закрепленный на нижней раме, и груз для установки грузозахватного устройства, взаимодействующий со стаканом и выполненный с верхним и нижним фланцами и отверстиями в этих фланцах соответственно для подвижных относительно этого груза вторых водил и грузозахватного устройства, при этом верхняя рама выполнена с отверстиями для расположения в них осей с болтами их крепления к этой раме, на осях в выемках верхней рамы расположены шестерни с возможностью кругового вращения, фланец полого цилиндра и верхняя рама выполнены с возможностью зацепления с упомянутыми шестернями, по обеим сторонам кольцевого выступа полого цилиндра расположены шарики для сопряжения верхней рамы и полого цилиндра, в кольцевой выточке винта расположены шарики, взаимодействующие с нижней рамой, имеющей также шлицы для взаимодействия со шлицами, выполненными на фланце винта, в сквозном отверстии винта установлена ось с шарами, взаимодействующими с нижней рамой, а подвижное кольцо размещено на полом цилиндре.
Признаки, заключающиеся в предложенном выполнении грузонесущего механизма и груза установки грузозахватного устройства, отличают заявляемое изобретение от прототипа, что позволяет сделать вывод о его соответствии критерию изобретения "новизна".
Анализируемое устройство соответствует критерию изобретения "промышленная применимость", поскольку предназначено для использования в народном хозяйстве, так как относится к подъемно-транспортному оборудованию, а именно к захватным устройствам; раскрыто с полнотой, достаточной для осуществления с помощью описанных в заявке средств и методов; обеспечивает создание захватного устройства для грузов с поворотной головкой, в свою очередь обеспечивающей широкие функциональные возможности по захвату, ориентации и транспортировке груза.
В обнаруженной в процессе поиска информации отсутствуют сведения об указанном в заявке на изобретение техническом результате и из нее не выявлено влияние отличительных в заявляемом изобретении признаков на достижение такого результата, следовательно анализируемое устройство соответствует критерию изобретения "изобретательский уровень".
Сущность изобретения поясняется чертежом, на котором изображено исходное (перед поднятием груза) положение поворотной головки захватного устройства.
Головка поворотная содержит полый цилиндр 1 с опорным фланцем 2 в нижней части полого цилиндра 1 и серьгой 3, выполняющей функцию элемента навешивания на крюк грузоподъемного механизма с отверстием 4 в верхней части полого цилиндра 1 для навешивания на крюк грузоподъемного механизма подъемно-транспортного оборудования.
На верхней поверхности опорного фланца 2 имеется кольцевой выступ 5, а на его переферийной окружной торцевой поверхности элементы зацепления 6.
На наружной поверхности полого цилиндра 1 имеется кольцевая выемка 7, предназначенная для размещения наружного подвижного пружинного кольца 8. Кольцо 8 предназначено для упора верхней рамы 11 в случае перемещения ее в сторону кольца 8 относительно полого цилиндра 1 в определенных (например, наклонных) нерабочих положениях заявленного устройства. Внутри полого цилиндра 1 выполнено днище 9 с центральным резьбовым сквозным отверстием 10.
На верхней поверхности опорного фланца 2 полого цилиндра 1 располагается верхняя рама 11, охватывающая полый цилиндр 1 и его фланец 2. Верхняя рама 11 и фланец 2 полого цилиндра 1 сопряжены, например с помощью шариков 12, располагающихся по обеим сторонам кольцевого выступа 5, фланца 2 полого цилиндра 1. На сопрягаемой поверхности верхней рамы 11 имеется кольцевой выступ 13, по обеим сторонам которого располагаются шарики 12.
На верхней раме 11 имеются, как минимум, два противоположно расположенных отверстия 14, в которых в свою очередь располагаются оси 15, на которых крепятся шестерни 16, с возможностью вращения вокруг этих осей 15. Шестерни 16 имеют элементы зацепления ответные элементам зацепления 6 на торцевой поверхности фланца 2 полого цилиндра 1.
Каждая ось 15 крепится с помощью болта 17 на верхней раме 11. Шестерни 16 располагаются в соответствующих выемках 18 в верхней раме 11 и находятся в постоянном зацеплении с элементами зацепления 6 фланца 2 полого цилиндра 1 и элементами зацепления рамы 11.
На периферии верхней рамы 11 ввернуты, как минимум, два противоположных неподвижных водила 19, которые располагаются в соответствующих продольных отверстиях 20 подвижных водил 21, которые в свою очередь располагаются в прорезях соответственно 22 нижней рамы 23 и прорезях 24 фланца 25 груза 26. Размеры прорезей 22 нижней рамы 23 и 24 фланца 25 груза 26 меньше соответствующих диаметров головок 28 и 27 подвижных водил 21, которыми подвижные водила 21 взаимодействуют соответственно с нижней рамой 23, неподвижными водилами 19 и фланцем 25 груза 26.
Сквозное резьбовое отверстие 10 в днище 9 полого цилиндра 1 предназначено для ввертывания и вывертывания винта 29, на котором снаружи, в нижней его части, выполнена кольцевая выемка 30, предназначенная для размещения шариков 31, взаимодействующих с нижней рамой 23. Резьбовое соединение днища 9 и винта 29 находится за пределами самоторможения и самозаклинивания резьб.
В нижней части винт 29 выполнен в виде ступенчатого фланца 32, на одной из ступеней которого (нижней) расположены шарики 33, взаимодействующие со ступенчатой кольцевой поверхностью 34 нижней рамы 23, а на другой (верхней) ступени выполнены по окружности шлицы 35, предназначенные для зацепления с ответными шлицами 36 нижней рамы 23.
В винте 29 выполнено сквозное отверстие 37, в котором расположена ось 38 с головками 39, собранная, например, из полуосей с помощью резьб. На оси 38 подвижно закреплены шары 40, взаимодействующие с нижней рамой 23.
В нижней ступенчатой части винта 29 снаружи, охватывая его, опираясь на шарики 33 и упираясь в шарики 31, расположена нижняя рама 23, предназначенная для периодического сцепления и отцепления посредством шлиц 36 со шлицами 35 винта 29 и передачи момента вращения от винта 29 через посредство нижней рамы 23 и водил 19 и 21 верхней раме 11.
В центре нижней рамы 23 выполнено сквозное отверстие ступенчатой формы, одна из ступеней которого (нижняя) предназначена для размещения шариков 33, а другая (верхняя) - для размещения шлиц 36.
В нижней части рамы 23 с помощью болтов 41 крепится стакан 42, взаимодействующий периодически с грузом 26. С помощью подвижных водил 21 груз 26 крепится подвижно к нижней раме 23 посредством их головок до упора в верхний фланец 25 груза 26 и головок 28 подвижных водил 21 в нижнюю раму 23. При этом каждое из неподвижных водил 19 имеет головку 43. В нижней части груза 26 имеется крепежный элемент, например нижний фланец 44 с отверстиями 45 для крепления, например захватного устройства для грузов или самого транспортируемого груза.
Таким образом грузонесущий механизм для взаимодействия с грузозахватным устройством представляет собой совокупность полого цилиндра 1, нижней рамы 23, верхней рамы 11, по меньшей мере двух пар неподвижных водил 21 и неподвижных водил 19, стакана 42, и винта 29, а деталью установки грузозахватного устройства является груз 26 с отверстиями 24 в верхнем его фланце 25 и отверстиями 45 в его нижнем фланце 44.
Устройство работает следующим образом. Поворотная головка с помощью отверстия 4 в серьге 3 полого цилиндра 1 навешивается на крюк грузоподъемного механизма подъемно-транспортного оборудования. В исходном (нерабочем) положении головки, навешенной на крюк, винт 29 ввернут в резьбовое отверстие 10 днища 9 полого цилиндра 1 для положения упора верхней рамы 11 в верхние головки 28 подвижных водил 21. Соответственно нижняя рама 23 находится в верхнем положении и ее шлицы 36 выведены из зацепления со шлицами 35 винта 29; стакан 42 упирается в груз 26, а между нижними головками 27 подвижных водил 21 и верхним фланцем 25 груза 26 и головками 43 неподвижных водил 19 и верхними головками 28 подвижных водил 21 имеются зазоры.
При поднятии с помощью грузоподъемного механизма подъемно-транспортного оборудования полого цилиндра 1 с верхней рамой 11 и неподвижными водилами 19, подниматься будет и винт 29 до положения сцепления его шлиц 35 со шлицами 36 нижней рамы 23.
Гарантированность поднятия винта 29 относительно верхней рамы 11 и полого цилиндра 1 обеспечивается разностью скоростей поднятия полого цилиндра 1 и опускания (вывертывания) винта 29. Скорость поднятия полого цилиндра 1 всегда будет больше скорости вывертывания винта 29 по вертикальной линии относительно полого цилиндра 1, так как поднятие полого цилиндра 1 происходит беспрепятственно и по прямой (вертикальной) линии, а опускание винта 29 за то же время по вертикальной линии с вращением по винтовой траектории с участием силы трения, препятствующей вращению винта 29, а следовательно, и его опусканию. Работа механизма рассчитана на то, что скорость поднятия полого цилиндра 1 с винтом 29 больше скорости опускания винта 29 относительно полого цилиндра 1 под действием силы его тяжести.
Опускание винта 29 относительного полого цилиндра 1 при его поднятии полым цилиндром 1 и самопроизвольным вращением под действием своей силы тяжести происходит до момента зацепления его шлиц 35 со шлицами 36 нижней рамы 23.
Дальнейшее вращение винта 29 при его дальнейшем поднятии происходит совместно с нижней рамой 23, водилами 19 и 21 и верхней рамой 11 под действием своей силы тяжести и силы тяжести нижней рамы 23 и груза 26 с транспортируемым грузом, если он прицеплен к грузу 26. При этом элементы зацепления верхней рамы 11 будут воздействовать с усилием на элементы зацепления шестерен 16, вращая их против хода часовой стрелки (вид на поворотную головку снизу). При этом шестерни 16 своими элементами зацепления будут обкатываться по элементам зацепления верхней рамы 11 и элементам зацепления 6 фланца 2 полого цилиндра 1. Оси 15 шестерен 16, закрепленные на верхней раме 11, будут перемещаться вместе с шестернями 16, вращаясь вместе с рамой 11 на некоторый угол от исходного положения. Элементы зацепления шестерен 16, которые находятся в зацеплении с элементами зацепления 6 фланца 2 полого цилиндра 1, при вращении шестерен 16 будут воздействовать с усилием на элементы зацепления 6 фланца 2 полого цилиндра 1. При этом в случае навешивания полого цилиндра 1 на крюк грузоподъемного механизма подъемно-транспортного оборудования, который препятствует вращению полого цилиндра 1, под упомянутым воздействием элементов зацепления верхней рамы 11, шестерни 16 будут обкатываться по элементам зацепления 6 фланца 2 полого цилиндра 1, перемещаясь от исходного положения на тот же угол, что и верхняя рама 11.
В случае навешивания полого цилиндра 1 на крюк грузоподъемного механизма подъемно-транспортного оборудования, который не препятствует вращению полого цилиндра 1, под упомянутым воздействием элементов зацепления шестерен 16 и винта 29, шестерни 16 будут обкатываться по элементам зацепления 6 фланца 2 полого цилиндра 1, вращая полый цилиндр 1 от исходного положения на такой же угол, на который повернута верхняя рама 11, но в противоположную от нее сторону, то есть по ходу часовой стрелки (вид на поворотную головку снизу).
Поскольку, согласно описанию заявленного устройства, разворот грузоподъемного устройства и груза связан через посредство элементов, изложенных в описании заявленного устройства, с поворотом верхней рамы 11, то ориентация грузоподъемного устройства и груза, согласно изложенному, обеспечена.
При вывертывании и опускании винта 29 относительно полого цилиндра 1, последний стремится вращаться относительно верхней рамы 11 в сторону, обратную вращению винта 29, но этому вращению будут препятствовать элементы зацепления шестерен 16, которые с одной стороны упираются в элементы зацепления 6 на фланце 2 полого цилиндра 1, а с другой стороны в элементы зацепления рамы 11. Таким образом достигается равномерная скорость вращения верхней рамы 11 и полого цилиндра 1.
Наличие шестерен 16, закрепленных на верхней раме 11 с помощью осей 15, закрепленных на верхней раме 11 болтами 17 в выемках 18 верхней рамы 11 и находящихся в зацеплении с элементами зацепления 6 на фланце 2 полого цилиндра 1, позволяет сохранить направление его вращения и направление вращения верхней рамы 11 без обгона углового вращения полого цилиндра 1 относительно верхней рамы 11.
При отсутствии шестерен 16 с элементами зацепления, закрепленных на верхней раме 11 с помощью осей 15 и болтов 17 в выемках 18 и находящихся в зацеплении с элементами зацепления верхней рамы 11 и элементами зацепления 6 на фланце 2 полого цилиндра 1, угловое вращение полого цилиндра 1 и верхней рамы 11 будет находиться в прямой зависимости от их масс, что приводит к замедленного угловому вращению верхней рамы 11 и ускоренному угловому вращению полого цилиндра 1 относительно верхней рамы 11.
Таким образом обеспечивается вывертывание винта 29 из резьбового отверстия 10 в днище 9 полого цилиндра 1, а следовательно, и вращение всего механизма, за исключением полого цилиндра 1, вместе с верхней рамой 11 относительно полого цилиндра 1. В процессе вращения захватного устройства с поворотной головкой с помощью грузоподъемного механизма подъемно-транспортного оборудования осуществляется ориентация такого захватного устройства (или груза) относительно транспортируемого груза перед его взятием (отцеплением). Вращение осуществляется до положения упора головок 43 неподвижных водил 19 в головки 28 подвижных водил 21.
Если за момент вращения не удалось сориентировать захватное устройство относительно груза, то все упомянутые действия можно будет повторить. Для этого необходимо опустить поворотную головку на транспортируемый груз (или землю) до упора стакана 42 в груз 26 и верхней рамы 11 в головки 28 подвижных водил 21, что соответствует положению прослабления строп крюка грузоподъемного механизма (контроль визуальный).
При этом при условии неподвижности нижней рамы 23, т.е. стакан 42 упирается в груз 26, полый цилиндр 1 с верхней рамой 11 и подвижными водилами 19 будут опускаться вниз относительно нижней рамы 23, а винт 29, выйдя из зацепления с нижней рамой 23 под действием своей силы тяжести полого цилиндра 1 с верхней рамой 11 и неподвижными водилами 19, опустившись до положения упора верхней рамы 11 в головки 28 подвижных водил 21, будет ввинчиваться в днище 9 полого цилиндра 1, опираясь вращающимися шарами 40 на нижнюю раму 23, катясь по ней до положения упора верхней рамы 11 в головки 28 подвижных водил 21.
При дальнейшем поднятии поворотной головки захватного устройства для грузов с помощью грузоподъемного механизма подъемно-транспортного оборудования упомянутые действия повторяются.
Заявляемая поворотная головка для грузов обладает при ее эксплуатации широкими функциональными возможностями, благодаря обеспечению ориентации захватного устройства относительно транспортируемого груза на любом подъемно-транспортном оборудовании, без их какого-либо переоборудования под предлагаемую поворотную головку. Данная поворотная головка удобна и безопасна в эксплуатации, надежна в работе и, не имея электропривода, не требует расхода электроэнергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С УСТУПООБРАЗНЫМИ ПРОДОЛЬНЫМИ ДЕРЖАТЕЛЯМИ | 1990 |
|
RU2009100C1 |
| КРЫШКА ДЛЯ ТАРЫ | 1988 |
|
RU2028258C1 |
| Грузозахватное устройство | 1990 |
|
SU1773255A3 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Захватное устройство для контейне-POB | 1979 |
|
SU798019A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| Захват-кантователь | 1978 |
|
SU819038A1 |
| Автоматический клещевой захват | 1980 |
|
SU925838A1 |
Изобретение относится к грузозахватным устройствам. Поворотная головка захватного устройства для грузов содержит грузонесущий механизм для взаимодействия с грузозахватным устройством, включающий в себя наружное подвижное кольцо и элемент для навешивания на крюк грузоподъемного устройства. Грузонесущий механизм содержит полый цилиндр, выполненный с фланцем, имеющим кольцевой выступ, и днищем с резьбовым отверстием, винт, выполненный со ступенчатым фланцем, кольцевой выемкой и сквозным отверстием и установленный в резьбовом отверстии днища полого цилиндра, нижнюю и верхнюю рамы, по меньшей мере две пары водил, одни из которых жестко закреплены на верхней раме и размещены в продольных отверстиях других водил, размещенных в прорезях нижней рамы, стакан, закрепленный на нижней раме, и груз для установки грузозахватного устройства, взаимодействующий со стаканом и выполненный с верхним и нижним фланцами и отверстиями в этих фланцах соответственно для подвижных относительного этого груза вторых водил и грузозахватного устройства. Поворотная головка позволяет расширить функциональные возможности. 1 ил.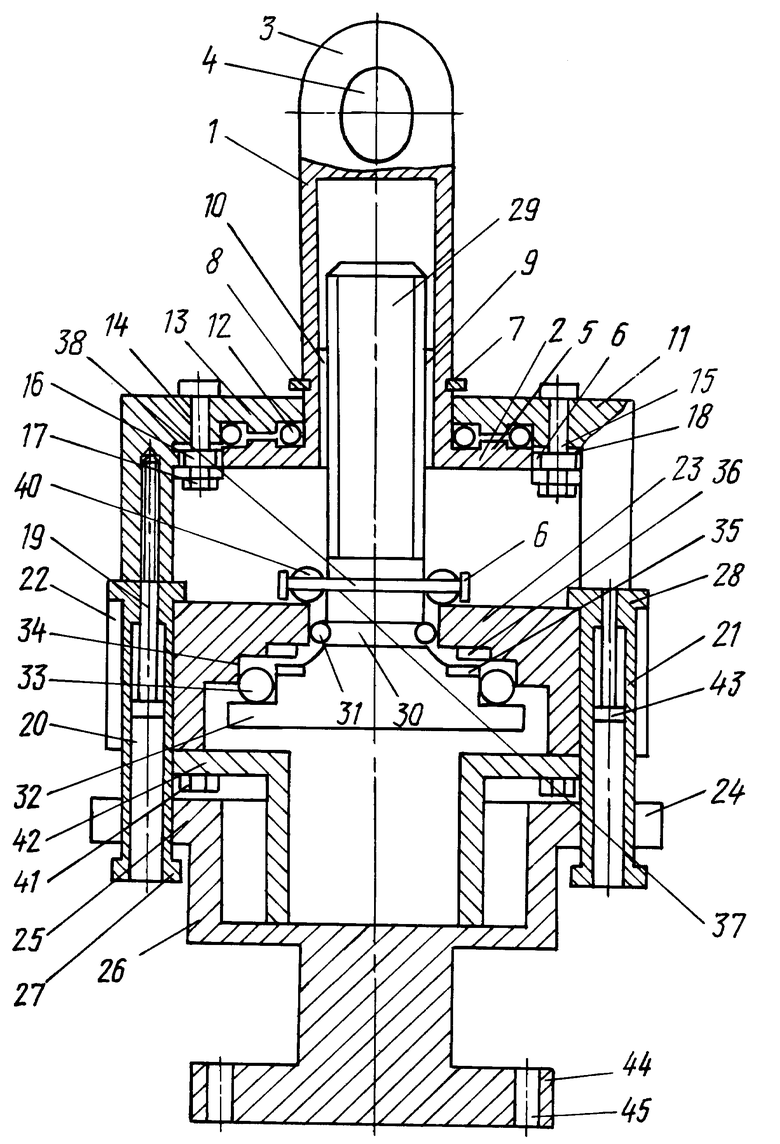
Поворотная головка захватного устройства для грузов, содержащая грузонесущий механизм для взаимодействия с грузозахватным устройством, включающий в себя наружное подвижное кольцо и элемент для навешивания на крюк грузоподъемного устройства, отличающаяся тем, что грузонесущий механизм содержит полый цилиндр, выполненный с фланцем, имеющим кольцевой выступ, и днищем с резьбовым отверстием, винт, выполненный со ступенчатым фланцем, кольцевой выемкой и сквозным отверстием и установленный в резьбовом отверстии днища полого цилиндра, нижнюю и верхнюю рамы, по меньшей мере две пары водил, одни из которых жестко закреплены на верхней раме и размещены в продольных отверстиях других водил, размещенных в прорезях нижней рамы, стакан, закрепленный на нижней раме, и груз для установки грузозахватного устройства, взаимодействующий со стаканом и выполненный с верхним и нижним фланцами и отверстиями в этих фланцах соответственно для подвижных относительно этого груза вторых водил и грузозахватного устройства, при этом верхняя рама выполнена с отверстиями для расположения в них осей с болтами их крепления к этой раме, на осях в выемках верхней рамы расположены шестерни с возможностью кругового вращения, фланец полого цилиндра и верхняя рама выполнены с возможностью зацепления с упомянутыми шестернями, по обеим сторонам кольцевого выступа полого цилиндра расположены шарики для сопряжения верхней рамы и полого цилиндра, в кольцевой выточке винта расположены шарики, взаимодействующие с нижней рамой в ее отверстии, а на его ступенчатом фланце - шарики, взаимодействующие с нижней рамой, имеющей также шлицы для взаимодействия со шлицами, выполненными на фланце винта, в сквозном отверстии винта установлена ось с шарами, взаимодействующими с нижней рамой, а подвижное кольцо размещено на полом цилиндре.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ГИДРАВЛИЧЕСКИЙ ГРЕЙФЕР ДЛЯ ЗАХВАТА | 0 |
|
SU358244A1 |
| Устройство для поворота груза | 1983 |
|
SU1165626A1 |
| Устройство для поворота захватов | 1989 |
|
SU1664715A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ РАЗДАТОЧНОЙ ТЕЛЕЖКИ | 1991 |
|
RU2009977C1 |

