Предметом изобретения являются способ и схема для синхронизации сейсмических и сейсмоакустических измерительных сетей, особенно шахтных искробезопасных сетей.
Специфика сейсмических и сейсмоакустических шахтных измерительных сетей обусловлена их пространственным расположением в подземных выработках шахт. Синхронизирующий измерительные сети сигнал GPS, в зависимости от расположения приемной кассеты цифровой телетрансмиссии сейсмических или сейсмоакустических систем, состоящей из многих цифровых приемников, поступает к ней непосредственно или передается с поверхности шахты посредством шахтных сетей Ethernet, проводных или световодных, по стандарту IEEE 1588. Каждый измерительный канал в шахтных цифровых геофизических измерительных сетях состоит из цифрового передатчика, соединенного с сейсмометром или геофоном и цифрового приемника, которые соединены друг с другом отдельным телетрансмиссионным каналом связи. Цифровые передатчики, работающие с сейсмометром или геофоном, расположенные вблизи очистной лавы, чаще всего используют для передачи измерительных данных отдельные телетрансмиссионные линии, позволяющие обеспечить центральное питание передатчиков от цифровых приемников, а также двустороннюю синхронную передачу. Цифровой приемник оборудован микроконтроллером с часами реального времени, обеспечивающим питание и гальваническую развязку преобразователем, и соединен с часами GPS, а также, посредством телетрансмиссионной линии, с цифровым передатчиком. В свою очередь, цифровой передатчик содержит микроконтроллер, искробезопасную схему развязки и схему аналого-цифрового преобразователя.
Известен, из патентного описания PL 211622, способ и сеть регистрации геофизических, особенно медленно изменяющихся сигналов, поступающих из точек на выбранном, обширном участке территории, который заключается в том, что сигналы, собранные в каждой измерительной точке, подлежат одновременной дискретизации и записи, независимо друг от друга, в каждой измерительной точке, момент отсчета геофизического сигнала синхронизируется с наружным источником эталонного времени и регистрируются значения сигналов в каждой измерительной точке, а сигналы после их преобразования из аналогового вида в цифровой хранятся в измерительной точке на носителях информации, рекомендательно на картах памяти Compact Flash, а также, независимо от их накопления и хранения, передаются в станцию сбора данных ONLINE со всех точек с помощью телетрансмиссионной сети, рекомендательно по интернету и/или сотовой телефонной связи GSM, с возможностью временного прекращения передачи информации, когда станция сбора данных или телетрансмиссионная сеть не работает, с возможностью возобновления передачи после перерыва, начиная с момента прекращения передачи, используя информацию, накопленную картами Compact Flash за период перерыва в передаче данных. Одновременная дискретизация сигналов в каждой измерительной точке синхронизируется сигналами эталонного времени из наружного источника эталонного времени, рекомендательно от системы GPS и/или передатчика DCF, в результате чего происходит идентификация фазных зависимостей сигналов, принимаемых отдельными измерительными точками.
Известные до настоящего времени способы и схемы синхронизации измерительных сетей, регистрирующих геофизические сигналы, используя для синхронизации этих измерений наружные источники эталонного времени от системы GPS, не обеспечивают достаточно точной синхронизации выполнения измерений, главным образом из-за неучитывания запаздывания, связанного с прохождением сигналов вдоль телетрансмиссионных линий разной длины, что, в частности, делает невозможным обеспечение достаточной точности локализации сейсмических явлений. Это касается особенно пограничных районов соседних шахт, а также применения активной и пассивной сейсмической скоростной томографии, особенно в случае просвечивания небольших участков горного массива, например, впереди фронта очистной лавы, где временное запаздывание просвечивающей волны очень небольшое и сравнимо с запаздыванием, вносимым телетрансмиссионными линиями. Это имеет также существенное значение в случае выполнения измерений сейсмоакустических сигналов, для которых запаздывание пропагации может составлять до 10% периода дискретизации. Применяемые в настоящее время в схемах преобразования аналого-цифровые преобразователи преобразуют сигнал с большой частотой и осуществляют его цифровую фильтрацию. Достижение готовности и получение данных, синхронно преобразованных в точно определенные моменты дискретизации, требует соответствующего управления частотой их работы. В зависимости от режима работы преобразователей необходимо также учитывать время аналого-цифрового преобразования и фильтрации, чего не обеспечивают существующие схемы и что является источником измерительной погрешности, особенно в случае просвечивания небольших участков горного массива.
Целью изобретения является устранение несовершенства существующих способов и схем синхронизации сейсмических и сейсмоакустических сетей путем улучшения синхронизации этих сетей, учитывающего корректировку времени запаздывания в телетрансмиссионных линиях и, дополнительно, корректировку времени преобразования и цифровой фильтрации, реализуемой в аналого-цифровых преобразователях, применяемых в этих сетях, а также усовершенствование комплектации и передачи блоков данных.
Способ синхронизации сейсмических и сейсмоакустических измерительных сетей характеризуется тем, что в каждом канале передачи данных периодически инициируется измерение величины временной корректировки прохождения сигнала от приемника к передатчику и обратно. Затем в цепи фазовой автоподстройки частоты приемника, содержащей часы внутреннего времени, генерируется в непрерывном режиме, в качестве корректировки, сдвинутый секундный внутренний эталонный такт с фазным опережением на величину временной корректировки, по отношению к секундному эталонному такту часов, синхронизированных от глобальной спутниковой навигационной системы одновременным ускорением времени часов внутреннего времени на величину временной корректировки. Также в непрерывном режиме генерируется, намного чаще, рекомендательно в 250 раз чаще, внутренний синхронизирующий такт с опережением по фазе на величину временной корректировки в отношении к секундному эталонному такту, манипулирующий выход преобразователя питания и развязки, питающего искробезопасным напряжением телетрансмиссионную линию, а при ее посредстве управляющий работой цепи фазовой автоподстройки частоты передатчика, охватывающей обратной связью аналого-цифровой преобразователь. Эта процедура реализуется таким образом, чтобы готовность аналого-цифрового преобразователя появлялась многократно, рекомендательно в 40 раз чаще синхронизирующего такта, между очередными импульсами синхронизирующего такта, и один раз на число готовностей, рекомендательно 40 готовностей, синхронно с этим тактом, а также рекомендательно на каждые 10000 измерений, синхронно с односекундным эталонным тактом. В результате в приемнике получают в каждом периоде синхронизирующего такта блок измерительных данных дискретизации аналоговых составляющих из сейсмического датчика или геофонного измерительного зонда. Затем реальное время дискретизации первой выборки (отсчета) в пакете данных, состоящем из блоков измерительных данных, получаемое из часов внутреннего времени в момент заднего фронта (среза) секундного эталонного такта, которое учитывает уже время запаздывания сигнала в телетрансмиссионной линии, корректируется дополнительно путем программного вычитывания постоянной поправки, рекомендательно 8 мс, вытекающей из времени комплектования блока измерительных данных в передатчике, которое равно одному периоду синхронизирующего такта и времени передачи результатов измерений, содержащихся в блоке измерительных данных в виде цифровых блоков, из передатчика к приемнику, которое также равно одному периоду такта, синхронизирующего передатчик.
Несмотря на то, что некоторые элементы схемы, используемые для реализации способа, являющегося предметом изобретения, предложены в программном виде, для специалиста в области, касающейся изобретения, является очевидным, что эти элементы могут быть также выполнены в аппаратном виде. Учитывая вышесказанное, если в любом месте описания указаны устройства, реализованные программным способом, следует иметь в виду, что эти же элементы схемы могут быть реализованы аппаратным способом. Программные устройства в выбранных случаях дешевле и удобнее, чем аппаратные. Поэтому, в связи с вышесказанным, ни общее описание, ни примеры исполнения изобретения в местах, касающихся программного вида, не должны пониматься в узком смысле, как касающиеся исключительно программных устройств.
В свою очередь, в приемнике программно реализуется фазовая автоподстройка частоты с использованием микроконтроллера, причем программируется фазовый детектор с заданной величиной постоянной корректирующей временной поправки внутреннего секундного эталонного такта, тогда как фазовый детектор управляет модулятором ширины импульса, который через фильтр низких частот управляет входом генератора, управляемого напряжением. Выходной сигнал этого генератора после деления программно управляемым делителем внутреннего времени тактирует аппаратные часы внутреннего времени микроконтроллера. В результате этой процедуры получается внутренний секундный эталонный такт, сдвинутый по времени вперед на величину временной корректировочной поправки по отношению к секундному эталонному такту из глобальной спутниковой навигационной системы, равной времени запаздывания сигналов, передаваемых телетрансмиссионной линией. В то же время в результате деления частоты генератора, управляемого напряжением, осуществляемого делителем внутреннего времени получается внутренний синхронизирующий такт, передаваемый, рекомендательно каждые 4 мс, в передатчик. Этот такт многократно чаще, рекомендательно в 250 раз чаще, чем секундный внутренний эталонный такт, синхронизирует работу передатчика, с учетом различной по величине для каждого канала связи временной корректировочной поправки импульсов секундного внутреннего эталонного такта по отношению к эталонному такту из часов, синхронизированных от глобальной спутниковой навигационной системы, причем эта корректировка вытекает из ранее выполненного автоматического измерения времени запаздывания в данной телетрансмиссионной линии.
В передатчике импульсы синхронизирующего такта, передаваемые из приемника и воспроизводимые из телетрансмиссионной линии, управляют цепью автоподстройки частоты, программно организованной в микроконтроллере передатчика, охватывающей обратной связью аналого-цифровой преобразователь, работу которого тактирует выходная частота генератора, управляемого напряжением. При этом на вход этого генератора через фильтр нижних частот передатчика подается сигнал, длина которого пропорциональна погрешности фазы на выходе программируемого фазового детектора передатчика, сравнивающего фазу импульсов синхронизирующих тактов с импульсами, получаемыми в результате деления импульсов готовности аналого-цифрового преобразователя делителем синхронизирующего такта. В результате этой процедуры на выходе передатчика получается последовательный по времени цифровой результат дискретизации аналоговых составляющих сигнала, в виде блока измерительных данных результата дискретизации, синхронно с синхронизирующим тактом. В свою очередь, во взаимодействующем цифровом приемнике получают результат в виде пакета данных, состоящего из блоков измерительных данных результата измерений, синхронно с секундным эталонным тактом, блоки которого были переданы между очередными синхронизирующими тактами.
Кроме того, с целью повышения точности синхронизации дискретизации сигналов в канале приемника осуществляется программная корректировка времени дискретизации первой выборки пакета данных, состоящего из блоков измерительных данных, которое поступает из часов внутреннего времени в момент заднего фронта секундного эталонного такта, с дополнительным вычетом постоянной корректирующей поправки времени, равной сумме времени преобразования и времени цифровой фильтрации.
Схема для синхронизации сейсмических и сейсмоакустических измерительных сетей в линейном блоке приемника имеет встроенный короткозамыкающий телетрансмиссионную линию полупроводниковый ключ, соединенный посредством входной оптронной гальванической развязки с выходом микроконтроллера. Передатчик имеет блок формирования синхронизирующего такта, соединенный через конденсатор с линейным блоком передатчика. При этом выход блока формирования соединен с одним из входов фазового детектора микроконтроллера передатчика. В линейном блоке передатчика находятся две оптронные гальванические развязки сигналов, причем управляющий диод выходной оптронной гальванической развязки в линейном блоке передатчика является, вместе с тремя остальными диодами, элементом мостовой схемы выпрямителя Гретца, соединяющего линейный блок передатчика с телетрансмиссионной линией. Выход этой оптронной гальванической развязки соединен с входом данных микроконтроллера передатчика, а выход данных микроконтроллера передатчика соединен с управляющим диодом входной оптронной гальванической развязки в линейном блоке передатчика, выход которого управляет полупроводниковым ключом передатчика, осуществляющим манипуляцию телетрансмиссионной линией. Выход оптронной гальванической развязки выходного линейного блока приемника соединен с входом микроконтроллера, в то время как управляющий диод этой оптронной гальванической развязки соединяет питающе-управляющий преобразователь с телетрансмиссионной линией через ограничитель тока.
Приемник оснащен схемой автоподстройки частоты, которая содержит программно реализованный фазовый детектор с программно устанавливаемой величиной корректировочной поправки времени, аппаратный генератор с программно устанавливаемой шириной импульса, аппаратный фильтр нижних частот, соединенный с генератором, управляемым напряжением, выход которого соединен с делителем внутреннего времени. При этом генератор, управляемый напряжением, соединен с телетрансмиссионной линией через делитель внутреннего синхронизирующего такта, суммирующий узел и линейный блок приемника.
Передатчик оснащен схемой автоподстройки частоты, которая состоит из генератора импульсов с программно устанавливаемой шириной, аппаратного фильтра нижних частот передатчика, соединенного с генератором, управляемым напряжением, выход которого соединен с управляющим входом аналого-цифрового преобразователя. В свою очередь, выход готовности аналого-цифрового преобразователя соединен через делитель, определяющий число измерений, выполняемых между синхронизирующими тактами, с одним из входов фазового детектора передатчика, второй выход которого соединен с линейным блоком передатчика через формирующую схему и конденсатор.
Решение схемы и способа, согласно изобретению, обеспечивает в каждом канале взаимодействующих измерительных сейсмических и сейсмоакустических сетей точную синхронизацию, учитывающую запаздывание прохождения сигнала в линиях разной длины, а также продолжительность комплектации и передачи, последовательно, из передатчика ND к приемнику OD выборок трех составляющих сигнала колебаний из сейсмического датчика S1 и/или геофонного измерительного зонда G1, а также постоянное время преобразования и цифровой фильтрации сигнала. Изобретение существенно уменьшает погрешность измерения, что имеет особенно существенное значение в случае осуществления локализации сейсмических явлений в небольших участках горного массива, а также при просвечивании горного массива с использованием сейсмических волн, возбуждаемых этими явлениями или же возбуждаемых с применением активных методов.
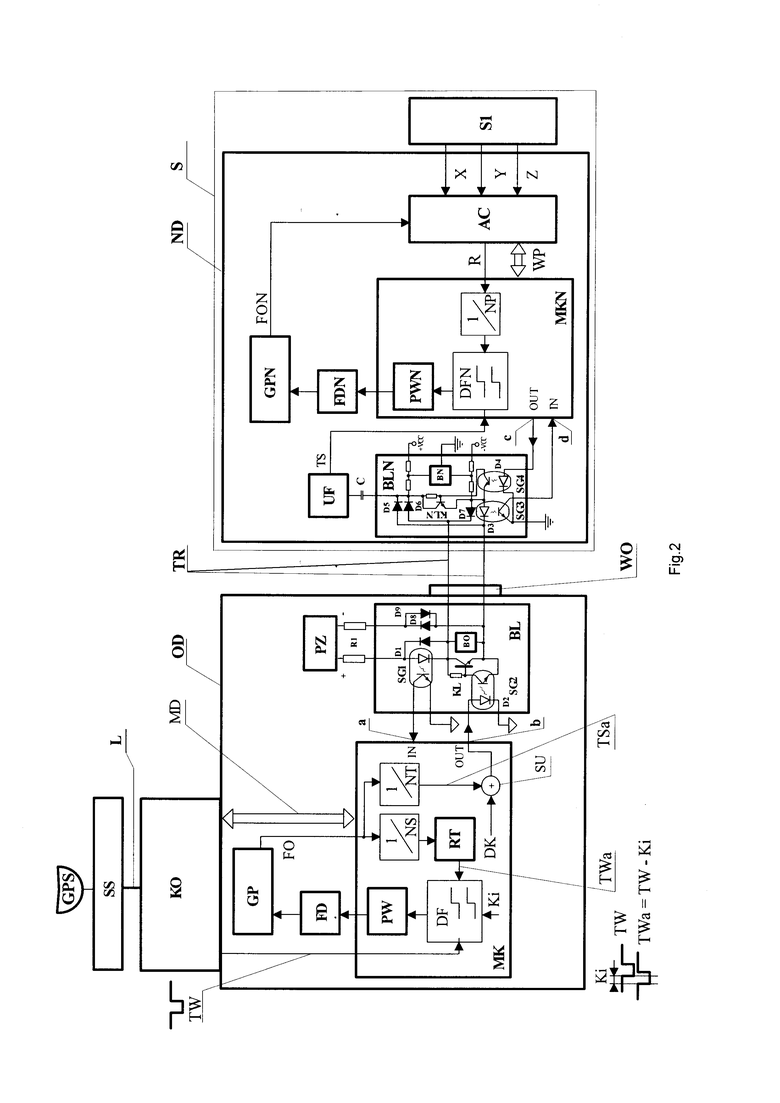
Предмет изобретения представлен, в примерном исполнении, на чертежах, где Fig. 1 представляет обзорную схему сейсмической и сейсмоакустической измерительной сети на шахте, Fig. 2 представляет блок-схему реализующей процесс синхронизации схемы для одного примерного измерительно-трансмиссионного канала, применяемого в сейсмической измерительной сети, Fig. 3 представляет основные временные графики сигналов TW, Twa, TSa, TS, R, MD, имеющих место в схеме, показанной на Fig. 2.
Пример I
В способе, являющемся предметом изобретения, в каждом канале передачи периодически инициируется измерение величины корректировки 2Ki времени прохождения сигнала от приемника OD к передатчику ND и обратно. Затем в цепи фазовой автоподстройки частоты приемника OD, содержащей часы внутреннего времени RT генерируется, в режиме непрерывной корректировки, сдвинутый секундный эталонный такт TWa с опережением по фазе на величину временной корректировки Ki в отношении к секундному эталонному такту TW от часов GPS с одновременным ускорением времени часов внутреннего времени RT на время временной корректировки Ki. Также непрерывно генерируется, в N=250 раз чаще, внутренний синхронизирующий такт TSa с опережением по фазе на величину временной корректировки Ki, по отношению к секундному эталонному такту TW, осуществляющий манипуляцию выходом питающего разделительного преобразователя PZ, обеспечивающего искробезопасное питание телетрансмиссионной линии TR, а посредством ее управляющий работой схемы фазовой автоподстройки частоты передатчика ND, охватывающей своей обратной связью аналого-цифровой преобразователь АС типа сигма-дельта, с тем чтобы готовность R аналого-цифрового преобразователя АС появлялась в NP=40 раз чаще, чем синхронизирующий такт TS, между очередными импульсами синхронизирующего такта TS и один раз на NP=40 готовностей R, синхронно с этим тактом, а также один раз на (N·NP)=10000 измерений, синхронно с секундным эталонным тактом TW. В результате этих процедур в приемнике OD получают в каждый период синхронизирующего такта TS блоки BNP измерительных данных от дискретизации аналоговых составляющих X, Y, Z из сейсмического датчика S1 или геофонного измерительного зонда G1. В каждый период секундного эталонного такта TW получают пакет, состоящий из 250 блоков BNP результатов измерений. При этом фактическое время дискретизации первой выборки в первом блоке измерительных данных BNP пакета результатов измерений, передаваемое в момент Т1 из часов внутреннего времени RT, которое уже учитывает время запаздывания сигнала TR в телетрансмиссионной линии дополнительно корректируется путем программного вычета постоянной задержки 8 мс, вызванной продолжительностью комплектования в передатчике ND блока измерительных данных BNP результатов измерений, равной одному периоду синхронизирующего такта TS и времени передачи результатов измерений, содержащихся в блоке измерительных данных BNP в виде цифровых выборок, из передатчика ND к приемнику OD, также равному одному периоду синхронизирующего такта TS. Кроме того, для каждого трехмерного измерительного канала (X, Y, Z), как сейсмического, так и сейсмоакустического, реализуется автоматическое измерение временной корректировки Ki запаздывания, вызванного продолжительностью прохождения сигнала в телетрансмиссионной линии TR, соответствующей данному каналу, соединяющей передатчик ND с приемником OD. С целью повышения точности синхронизации дискретизации сигналов в канале приемника OD осуществляется программная корректировка времени дискретизации первой выборки пакета данных, состоящего из N блоков измерительных данных BNP, принимаемого от часов RT в момент Т1, с дополнительным вычетом времени постоянной временной корректировки Тас, равного сумме времени преобразования Тр и времени цифровой фильтрации Tf. В каждом приемнике OD в цепи фазовой автоподстройки частоты, организованной с использованием микроконтроллера МКО, охватывающей: фазовый детектор DF с программно устанавливаемой величиной временной корректировки Ki, модулятор ширины импульса PW, управляемый от выхода фазового детектора DF фазовой погрешностью, аппаратный фильтр нижних частот FD, управляющий аппаратным генератором, управляемым напряжением GP, выход которого после деления программно настраиваемым делителем внутреннего времени 1/NS тактирует аппаратные часы внутреннего времени RT с заданным изначально актуальным астрономическим временем, передаваемым программным протоколом NMEA. В результате действия описанной выше цепи фазовой автоподстройки частоты приемника получают сдвинутый секундный эталонный такт TWa, со сдвигом по времени вперед на величину временной корректировки Ki по отношению к секундному эталонному такту TW от часов GPS, с одновременным ускорением местного времени в часах внутреннего времени RT на величину временной корректировки Ki. В результате деления частоты FO генератора, управляемого напряжением GP, программно настраиваемым делителем внутреннего синхронизирующего такта 1/NT в приемнике получают внутренний синхронизирующий такт TSa, каждые 4 мс сдвинутый по времени вперед на величину временной корректировки Ki по отношению к секундному эталонному такту TW, передаваемый в передатчик ND. Синхронизирующий такт TS, воспроизводимый в передатчике из внутреннего синхронизирующего такта TSa намного чаще, чем каждую 1 с, синхронизирует работу передатчика с учетом временной корректировки Ki импульсов секундного эталонного такта TW, вытекающей из ранее выполненного автоматического измерения запаздывания на телетрансмиссионной линии связи TR, а также тактирует передачу пакета данных, состоящего из N=250 блоков измерительных данных BNP, по 40 результатов в каждом блоке, из передатчика ND, синхронно с синхронизирующим тактом TS, причем весь пакет данных передается синхронно с секундным эталонным тактом TW. Согласно схеме импульсы внутреннего синхронизирующего такта TSa из приемника OD поступают в передатчик ND посредством находящегося в линейном блоке BL приемника, оптронного блока гальванической развязки SG2 и транзисторного ключа KL, короткозамыкающего напряжение питающего разделительного преобразователя PZ, подаваемое через резисторы R1 в искробезопасную телетрансмиссионную линию связи TR, защищаемую ввиду требуемой искробезопасности диодным барьером ВО, ограничивающим напряжение и ток в телетрансмиссионной линии TR.
В передатчике ND при посредстве блока линейных цепей BLN и схемы формирования такта UF воспроизводится синхронизирующий такт TS от переменной составляющей в телетрансмиссионной линии TR, вызываемой путем манипуляции в приемнике OD внутренним синхронизирующим тактом TSa. При этом TS=TSa+Ki. В передатчике ND импульсы синхронизирующего такта TS, получаемые в схеме формирования UF, управляют фазовой автоподстройкой частоты, программно организованной в микроконтроллере передатчика MKN, охватывающей обратной связью аппаратный аналого-цифровой преобразователь АС типа сигма-дельта, манипулируемый выходной частотой FO аппаратного генератора, управляемого напряжением GPN, от выхода аппаратного фильтра нижних частот передатчика FDN, на вход которого подается сигнал из модулятора PWN, продолжительность которого пропорциональна фазовой погрешности на выходе программируемого фазового детектора DFN, сопоставляющего для сравнения фазу синхронизирующих импульсов TS с импульсами, получаемыми в результате деления импульсов готовности R, генерируемых готовностью R аналого-цифрового преобразователя АС посредством программно задаваемого делителя синхронизирующего такта 1/NP. В результате такого решения получают на выходе передатчика блок измерительных данных BNP, состоящий из NP=40 цифровых результатов дискретизации аналоговых составляющих сигнала X, Y, Z, во время интервала между очередными фронтами импульсов синхронизирующего такта TS, синхронно с этим тактом. Кроме того, результат измерения WP передается из аналого-цифрового преобразователя АС в микроконтроллер MKN. Выходные данные в виде блока измерительных данных BNP результатов измерений передаются из передатчика ND посредством манипулирования телетрансмиссионной линии TR при помощи оптронной гальванической развязки SG4 и ключа передатчика KLN в линейном блоке передатчика BLN и принимаются приемником OD через оптронную гальваническую развязку SG1, диод которой управляется переменной составляющей тока в линии и после соответствующего формирования поступают последовательно в микроконтроллер приемника MK. Каждый N-й блок измерительных данных, состоящий из NP=40 результатов измерений, принимается приемником OD синхронно с секундным эталонным тактом TW из часов GPS. Первому блоку измерительных данных BNP, состоящему из NP=40 результатов, в пакете, состоящем из N=250 блоков результатов измерений BNP, выдаваемому из приемника OD, предшествует время, программно определяемое получаемым в приемнике OD от часов внутреннего времени RT в момент Т1.
Полученное время учитывает запаздывание в линии, а после дополнительной корректировки, заключающейся в вычитании из него постоянных величин времени, вытекающих из формирования блока (4 мс), продолжительности передачи блока (4 мс), а также постоянной величины времени преобразования и фильтрации сигнала в виде постоянной величины корректировочной поправки Тас, точно определяет время выполнения измерения первой выборки (отсчета) сигнала, передаваемой в первом блоке BNP пакета, состоящего из N блоков. Манипуляция телетрансмиссионной линии TR в блоке линейных цепей передатчика BLN и приемника OD позволяет отправлять последовательно комбинации битов записанных в цифровом виде данных колебаний - сигнала X, Y, Z, главным образом из передатчика ND к приемнику OD. Нерегулярно, спорадически, передаются конфигурационные и тестовые данные от приемника OD к передатчику ND. Изменению направления передачи предшествует передача с поверхности шахты А внутреннего синхронизирующего такта TSa двойной ширины и тогда передаются в подземную часть шахты В к передатчику ND конфигурационные данные из сумматорного узла SU микроконтроллера MK приемника OD. В способе, являющемся предметом изобретения, секундный эталонный такт TW, подаваемый из часов GPS, синхронизирует астрономическое время NMEA, подаваемое периодически в часы внутреннего времени RT. После измерения в канале связи очередной временной корректировки Ki запаздывания, вносимого телетрансмиссионной линией TR (напр., после изменения ее длины) путем генерирования импульса внутреннего синхронизирующего такта TSa и программного измерения временной корректировки 2Ki времени, истекающего до первого импульса, являющегося ответом передатчика ND, измеренная величина запаздывания программным образом вводится в виде временной корректировки Ki в фазовый детектор DF схемы фазовой автоподстройки частоты приемника OD. В результате действия фазового детектора DF схемы фазовой автоподстройки частоты микроконтроллера MK приемника OD часы внутреннего времени RT сдвигаются вперед на величину измеренной временной корректировки Ki в телетрансмиссионной линии TR и генерированный внутренний синхронизирующий такт TSa, осуществляющий синхронизацию работы передатчика ND, сдвинутый вперед на величину временной корректировки Ki по отношению к секундному эталонному такту TW от часов GPS. Ускоренные по времени импульсы внутреннего синхронизирующего такта TSa передаются к передатчику ND с задержкой, которая компенсирует введенное ускорение, то есть синхронно, каждый очередной N-й внутренний синхронизирующий такт TSa с секундным эталонным тактом TW часов GPS. В передатчике ND импульсы синхронизирующего такта TS с использованием схемы фазовой автоподстройки частоты с фазовым детектором DF управляют частотой генератора GPN и при его посредстве - аналого-цифрового преобразователя АС с тем, чтобы каждый NP-й результат преобразования выдавался синхронно с тактом TS и каждые N·NP=10000 с секундным эталонным тактом TW. Время Т1 на графике (Fig. 3) определяет время измерения первой выборки пакета данных, состоящего из многих блоков измерительных данных BNP. Определяется оно путем его принятия от часов внутреннего времени RT в момент заднего фронта синхронизирующего такта TW и размещения впереди передаваемого первого блока BNP пакета данных. Дополнительно оно корректируется путем вычитания 8 мс - продолжительности 2 синхронизирующих тактов TS, один из которых учитывает комплектование блока измерительных данных BNP, состоящего из NP=40 выборок, в передатчике ND, а во время второго такта осуществлялась передача блока измерительных данных BNP из передатчика ND в приемник OD, а также дополнительно путем вычитания постоянного времени преобразования и фильтрации в аналого-цифровом преобразователе. Для обеспечения синхронизации работы передатчика ND со сдвинутым секундным эталонным тактом TWa, ускоренным на время запаздывания сигнала в телетрансмиссионной линии TR, генерируемым часами GPS, приемник OD посылает чаще внутренний синхронизирующий такт TSa путем короткого замыкания преобразователя PZ ключом KL, управляемым с выхода микроконтроллера MK приемника OD посредством оптронной гальванической развязки SG2 с диодом D2. Внутренний синхронизирующий такт TSa воспроизводится в передатчике ND из переменной составляющей в телетрансмиссионной линии TR посредством схемы формирования UF синхронизирующего такта TS и управляет, с помощью организованной там схемы фазовой автоподстройки частоты, работой аналого-цифрового преобразователя АС таким образом, чтобы выполнял преобразование NP=40 измерений, с первым измерением, выполняемым синхронно с секундным синхронизирующим тактом TS. Укомплектованные измерительные данные в виде блока измерительных данных BNP, состоящего из NP=40 результатов, в микроконтроллере передатчика MKN передаются из передатчика ND посредством телетрансмиссионной линии TR в приемник OD в результате ее манипулирования ключом передатчика KLN, управляемым оптронной гальванической развязкой SG4 от выхода данных микроконтроллера передатчика MKN. Результат манипуляции телетрансмиссионной линии TR ключом KLN, в виде переменной составляющей, идентифицированной диодом D1 оптронной гальванической развязки SG1 в линейном блоке приемника BLO принимается микроконтроллером MK. Принятые микроконтроллером MK приемника OD данные, в виде пакета состоящего из блоков измерительных данных BNP, дополненные временем принятым в момент Т1 от внутренних часов RT, с описанными дополнительными корректировками, передаются магистралью данных MD в приемную кассету передачи KO и далее, посредством линии L в сейсмическую систему SS. В случае передачи конфигурационных данных канала передачи из сейсмической системы SS посредством приемника OD в передатчик ND передается более длительный импульс внутреннего синхронизирующего такта TSa, короткозамыкающий телетрансмиссионные линии ключом KLO. При этом посредством сумматорного узла SU микроконтроллера MK передаются конфигурационные данные в передатчик ND, где идентифицируются диодом D3 оптронной гальванической развязки SG3 и поступают на вход микроконтроллера MKN передатчика ND.
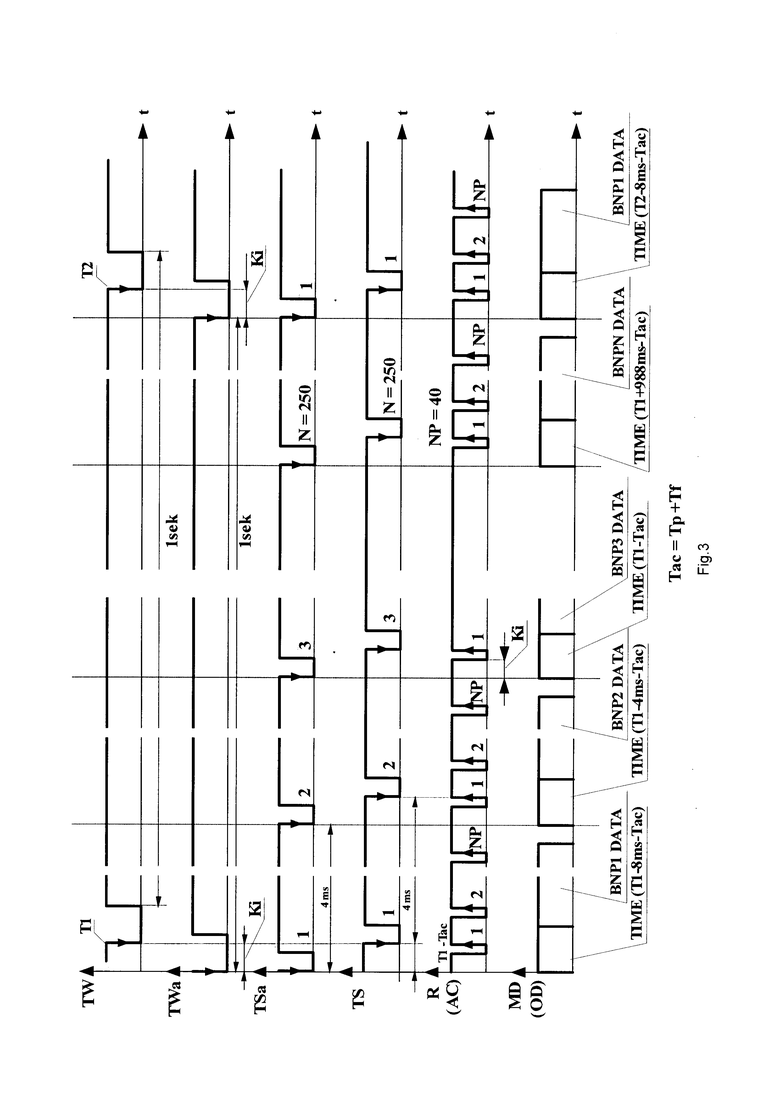
На представленных на Fig. 3 графиках показаны временные диаграммы:
- сигнала TW - секундного эталонного такта, передаваемого из приемника GPS;
- сигнала TWa - сдвинутого секундного внутреннего эталонного такта, создаваемого в приемнике OD, сдвинутого по времени вперед на величину временной корректировки Ki, равной автоматически измеренному запаздыванию в телетрансмиссионной линии TR, по отношению к секундному эталонному такту TW;
- сигнала TSa - внутреннего синхронизирующего такта, создаваемого в приемнике, синхронизирующего работу передатчика после прохождения сигналом телетрансмиссионной линии с запаздыванием Ki и воспроизведенного в передатчике ND как синхронизирующий такт TS. Сигнал TSa в N раз чаще сигнала TWa, причем N=250;
- сигнала TS - синхронизирующего передатчик, воспроизводимого в передатчике из такта TSa, передаваемого из приемника. Сигнал TS в N раз чаще сигнала TW, причем N=250;
- импульса готовности R аналого-цифрового преобразователя АС, определяющего моменты дискретизации трехмерного аналогового сигнала из сейсмического датчика S1 или геофонного измерительного зонда G1 на фоне такта TS, синхронизирующего работу передатчика ND с целью образования блоков измерительных данных BNP, состоящих из NP=40 результатов измерений, синхронно с этим тактом;
- измерительных данных, передаваемых измерительной магистралью MD в виде пакетов данных, состоящих из N блоков измерительных данных, то есть BNP1…BNPN, дополняемых каждую секунду временем измерения первой выборки, определяемым путем отсчета в момент Т1 (график TW) из внутренних часов RT и вычитывания из этого времени дополнительной временной поправки, вытекающей из времени для комплектации блока измерительных данных BNP и времени для его передачи, которая равна двум периодам такта TS=8 мс, а также постоянной корректировки времени Тас, как суммы времени для преобразования Тр данных аналого-цифровым преобразователем АС и цифровой фильтрации из приемника OD в приемную кассету передачи KO и далее, в сейсмическую систему SS. Блоки измерительных данных BNP передаются передатчиком ND, а также комплектуются и передаются из приемника OD посредством магистрали MD, синхронно с внутренним синхронизирующим тактом TSa.
Пример II
Схема для синхронизации сейсмических и сейсмоакустических измерительных сетей, предназначенная для применения способа, являющегося предметом изобретения, состоит из расположенной на поверхности шахты А сейсмической системы SS, а также двух шахтных сейсмоакустических систем SA1 и SA2. Сейсмическая система SS соединена с часами GPS, а также посредством световодной сети ETHERNET L с приемной кассетой цифровой передачи данных KO, которая содержит цифровые приемники OD с входами WO, к которым подключены отдельные телетрансмиссионные линии TR, соответствующие требованиям искробезопасности. Ко входам WO четырех приемников OD подключены четыре сейсмометрические станции S, установленные в подземной части шахты В. Каждая сейсмометрическая станция S содержит сейсмический датчик, соединенный с передатчиком ND, который в свою очередь соединен с приемником OD отдельной телетрансмиссионной линией TR. Каждая из двух шахтных сейсмоакустических станций SA1 и SA2 оснащена центральным искробезопасным питанием передатчиков ND от приемников OD, соединена с часами GPS, а также, посредством световодной сети ETHERNET L, с приемной кассетой цифровой передачи данных KO, которая содержит цифровые приемники OD с входами WO, к которым подключены отдельные телетрансмиссионные линии, соответствующие требованиям искробезопасности. К каждому входу WO подключены восемь геофонных станций G, установленных в прилегающих к очистной лаве штреках С. Каждая геофонная станция G содержит геофонный измерительный зонд G1, соединенный с передатчиком ND, который в свою очередь соединен с приемником OD отдельной телетрансмиссионной линией TR. Телетрансмиссионные линии TR служат для двусторонней цифровой передачи трехмерных цифровых сейсмических и сейсмоакустических сигналов между передатчиком ND и приемником OD, а также для искробезопасного питания цифрового передатчика ND с поверхности шахты А. Каждый приемник OD выполняет роль концентратора измерительных данных, который может быть установлен как на поверхности А, так и в подземной части шахты В. Являющаяся предметом изобретения схема в линейном блоке BL приемника OD имеет короткозамыкающий телетрансмиссионную линию полупроводниковый ключ KL, соединенный через оптронную гальваническую развязку SG2 линейного блока BL с выходом b микроконтроллера MK. В свою очередь, в передатчике ND блок формирования UF синхронизирующего такта TS соединен через конденсатор С с линейным блоком передатчика BLN. При этом выход блока формирования UF соединен с одним из входов фазового детектора DFN микроконтроллера передатчика MKN. В то же время в линейном блоке передатчика BLN находятся оптронные развязки сигналов SG3 и SG4. Управляющий диод выходной оптронной гальванической развязки SG3 в линейном блоке передатчика BLN является, вместе с диодами D5, D6 и D7, элементом выпрямителя Гретца, соединяющего линейный блок передатчика BLN с телетрансмиссионной линией TR. Выход оптронной гальванической развязки SG3 соединен с входом d данных микроконтроллера передатчика MKN, а выход с данных микроконтроллера передатчика MKN соединен с управляющим диодом D4 входной оптронной гальванической развязки SG4 линейного блока передатчика BLN, выход которого управляет полупроводниковым ключом передатчика KLN, осуществляющим манипуляцию телетрансмиссионной линией TR. В свою очередь выход оптронной гальванической развязки SG1 линейного блока BL приемника соединен с входом а микроконтроллера MK. В то же время управляющий диод D1 этой оптронной гальванической развязки соединяет питающе-управляющий преобразователь PZ с телетрансмиссионной линией TR через ограничитель тока, состоящий из резистора R1 и диодов D8 и D9.
Приемник OD содержит микроконтроллер MK, который управляет его работой, а также часы внутреннего времени RT, загружаемые спорадически от часов GPS и непрерывно синхронизированные односекундным эталонным тактом TW. В приемнике OD находится схема фазовой автоподстройки частоты, элементы которой реализованы по части программно, по части же являются аппаратными, причем программные элементы (DF, 1/NS, SU) обозначены на Fig. 2 более тонкой линией, в отличие от аппаратных элементов. Схема фазовой автоподстройки частоты содержит программно реализованный фазовый детектор DF с программно задаваемой временной корректировкой Ki, аппаратный генератор импульсов PW с программно задаваемой шириной импульса, аппаратный фильтр нижних частот FD, соединенный с генератором управляемым напряжением GP, выход которого, частотой FO, после деления программным делителем внутреннего времени 1/NS, управляет часами внутреннего времени RT, откуда выход односекундного внутреннего такта TSa фазовым детектором DF сравнивается по фазе с односекундным эталонным тактом TW из часов GPS. Величина временной корректировки, равная ранее измеренному запаздыванию в телетрансмиссионной линии TR, вызывает сдвиг вперед по времени, на величину корректировки Ki, эталонного такта TWa и вырабатываемого внутреннего синхронизирующего такта TSa по отношению к односекундному эталонному такту TW. В микроконтроллере MK генерируется также, после деления частоты FO делителем внутреннего синхронизирующего такта 1/NS, внутренний синхронизирующий такт TSa, который посредством телетрансмиссионной линии TR управляет работой передатчика ND. Осуществляется это с использованием оптронной гальванической развязки SG2 и полупроводникового ключа KL в линейном блоке BL приемника OD, который замыкает накоротко линию с напряжением, поступающим от питающе-разделительного преобразователя PZ, передавая этим, рекомендательно каждые 4 мс, импульс внутреннего синхронизирующего такта TSa в передатчик ND. Защитный барьер ВО обеспечивает искробезопасность телетрансмиссионной линии TR. В свою очередь, передатчик ND содержит так же, как приемник OD, микроконтроллер MKN, а также схему фазовой автоподстройки частоты, реализуемую частично программно, а частично аппаратным способом. Схема содержит программно реализованный фазовый детектор DFN, аппаратный генератор импульсов с программно задаваемой шириной PWN, аппаратный фильтр нижних частот передатчика FDN, соединенный с генератором передатчика, управляемым напряжением GPN, выход которого, частотой FON, тактирует работу аналого-цифрового преобразователя АС, тогда как импульсы готовности R аналого-цифрового преобразователя АС после деления программно реализованным делителем синхронизирующего такта 1/NP сравниваются в фазовом детекторе передатчика DFN с синхронизирующим тактом TS. При этом синхронизирующий такт TS=TSa+Ki. Синхронизирующий такт TS воспроизводится в передатчике ND из переменной составляющей на телетрансмиссионной линии TR в формирующей схеме UF. Число NP определяет количество готовностей R аналого-цифрового преобразователя АС, то есть число выполненных измерений во время одного синхронизирующего такта TS. Пакет блоков измерительных данных BNP передается с выхода микроконтроллера передатчика MKN посредством оптронной гальванической развязки SG4 и полупроводникового ключа KLN линейного блока передатчика BLN путем манипуляции телетрансмиссионной линии TR. Модулированный импульсным образом ток в телетрансмиссионной линии TR принимается приемником OD через диод оптронной гальванической развязки SG1 и после формирования прямоугольного сигнала в микроконтроллере MK комплектуются блоки данных и программно дополняются временем дискретизации первой выборки пакета блоков, из часов внутреннего времени RT, отсчитываемым в момент Т1 заднего фронта секундного эталонного такта TW, а также корректировками, вытекающими из комплектования блока измерительных данных BNP результатов измерений, его передачи, времени преобразования и цифровой фильтрации сигнала.
Список обозначений
А - поверхность шахты;
В - подземная часть шахты;
С - очистная лава;
SS - шахтная сейсмическая система;
KO - приемная кассета цифровой передачи данных;
WO - входы приемников;
L - световодная сеть ETHERNET;
S - сейсмометрическая станция;
S1 - сейсмический датчик;
SA - шахтная сейсмоакустическая система;
G - геофонная станция;
G1 - геофонная измерительная станция;
GPS - часы, синхронизируемые глобальной спутниковой навигационной системой;
TR - телетрансмиссионные линии;
OD - приемник;
MK - микроконтроллер приемника;
RT - часы внутреннего времени;
PW - генератор импульсов (с программно задаваемой шириной импульсов);
DF - фазовый детектор приемника (с программно задаваемой корректировкой времени);
FD - фильтр нижних частот приемника;
FO - выходная частота приемника;
GP - генератор, управляемый напряжением;
SG1 - выходная оптронная гальваническая развязка блока BL;
SG2 - входная оптронная гальваническая развязка блока BL;
D2 - диод оптронной гальванической развязки SG2;
KL - полупроводниковый ключ;
BL - линейный блок;
PZ - питающе-разделительный преобразователь;
ВО - защитный барьер;
SU - сумматорный узел;
1/NT - делитель внутреннего синхронизирующего такта;
1/NS - делитель внутреннего времени (определяющий требуемую частоту для часов внутреннего времени RT);
а - вход микроконтроллера приемника;
b - выход микроконтроллера приемника;
ND - передатчик;
MKN - микроконтроллер передатчика;
DFN - программный фазовый детектор передатчика;
PWN - генератор импульсов передатчика;
FDN - фильтр нижних частот передатчика;
FON - выходная частота передатчика;
AC - аналого-цифровой преобразователь;
GPN - управляемый напряжением генератор передатчика;
1/NP -делитель синхронизирующего такта (программный делитель, определяющий число готовностей преобразователя АС, то есть число измерений за время одного синхронизирующего такта TS);
UF - схема формирования такта TS=TS*+Ki в канале 
SG3 - выходная оптронная гальваническая развязка блока передатчика;
SG4 - входная оптронная гальваническая развязка блока передатчика;
D3 - диод оптронной гальванической развязки SG3;
D5, D6, D7 - диоды, являющиеся частью схемы выпрямителя Гретца;
KLN - полупроводниковый ключ;
BLN - линейный блок передатчика, блока линейных цепей передатчика;
с - выход данных (микроконтроллера передатчика);
d - вход данных (микроконтроллера передатчика);
TS - синхронизирующий такт (передатчик - TS=TSa+Ki, воспроизводимый в передатчике ND в формирующей схеме UF);
TW - секундный эталонный такт от часов GPS;
TWa - сдвинутый секундный внутренний эталонный такт (сдвинутый по фазе вперед по отношению к такту TW на величину временной корректировки Ki);
Т1 - момент времени (заднего фронта секундного эталонного такта);
TSa - внутренний синхронизирующий такт (вырабатываемый в приемнике и передаваемый в передатчик TSa·N=TWa);
Тас - постоянная временная корректировка (Тас=Тр+Tf);
Тр - время преобразования (в преобразователе АС в передатчике);
Tf - время цифровой фильтрации (сигнала в преобразователе АС и или микроконтроллере MK приемника);
R - импульсы готовности (аналого-цифрового преобразователя АС);
DK - конфигурационные данные (передаваемые в передатчик);
Ki - временная корректировка (равная запаздыванию в линии);
BNP - блок измерительных данных (с числом измерений NP, определяемым делителем 1/NP);
N - число (определяющее количество синхронизирующих тактов TSa, генерируемых в течение секундного внутреннего эталонного такта TWa, соответствует числу синхронизирующих тактов TS, генерируемых в течение секундного эталонного такта TW);
NP - число выполненных измерений (в течение одного синхронизирующего такта TS, определяемого делителем 1/NP, то есть число готовностей R аналого-цифрового преобразователя АС);
MD - магистраль передачи измерительных данных и времени (от микроконтроллера MK до приемной кассеты KO и обратно);
WP - результат измерения (передаваемый с аналого-цифрового преобразователя АС в микроконтроллер MKN).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕТАНА И ДРУГИХ ГОРЮЧИХ ГАЗОВ | 1991 |
|
RU2013565C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| СПОСОБ РЕГИСТРАЦИИ ОТРАЖЕННОГО СИГНАЛА ПРИ РАДИОЛОКАЦИИ | 2013 |
|
RU2519443C1 |
| УЛЬТРАЗВУКОВАЯ КОМПЬЮТЕРИЗИРОВАННАЯ СТАНЦИЯ | 1997 |
|
RU2124741C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ (ТЕВ) ПО ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ И СИСТЕМА РАСПРЕДЕЛЕНИЯ СИГНАЛОВ ТОЧНОГО ЕДИНОГО ВРЕМЕНИ | 2008 |
|
RU2381538C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ВРЕМЕНИ ПО ПРОВОДНОМУ РАДИОКАНАЛУ | 2007 |
|
RU2356080C1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи | 2017 |
|
RU2654958C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |

Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Предложен способ синхронизации сейсмических и сейсмоакустических измерительных сетей, особенно шахтных искробезопасных сетей, заключающийся в том, что в каждом трансмиссионном канале периодически инициируется измерение величины временной корректировки (2Ki), учитывающей время прохождения сигнала от приемника (OD) к передатчику (ND) и обратно. После этого схемой фазовой автоподстройки частоты приемника (OD), содержащей часы внутреннего времени (RT), генерируется в качестве корректировки в непрерывном режиме сдвинутый секундный внутренний эталонный такт (TWa) с опережением по фазе на величину временной корректировки (Ki) по отношению к секундному эталонному такту (TW) часов (GPS) с одновременным опережением времени часов внутреннего времени (RT) на величину временной корректировки (Ki) по отношению к секундному эталонному такту (TW), осуществляющему манипуляцию выхода питающе-разделительного преобразователя (PZ), искробезопасно питающего телетрансмиссионную линию (TR). Схема в линейном блоке (BL) приемника (OD) имеет осуществляющий манипуляцию телетрансмиссионной линией (TR) полупроводниковый ключ (KL) приемника (OD), соединенный через входную оптронную гальваническую развязку (SG2) линейного блока (BL) с выходом (b) микроконтроллера (MK). В свою очередь, в передатчике (ND) блок формирования (UF) синхронизирующего такта (TS) соединен через конденсатор (С) с линейным блоком передатчика (BLN). При этом выход блока формирования (UF) соединен с одним из входов фазового детектора (DFN) микроконтроллера передатчика (MKN). В свою очередь, в линейном блоке (BLN) передатчика находятся оптронные гальванические развязки сигналов (SG3) и (SG4). Технический результат - повышение точности выполнения синхронизации измерений. 2 н. и 5 з.п. ф-лы, 3 ил.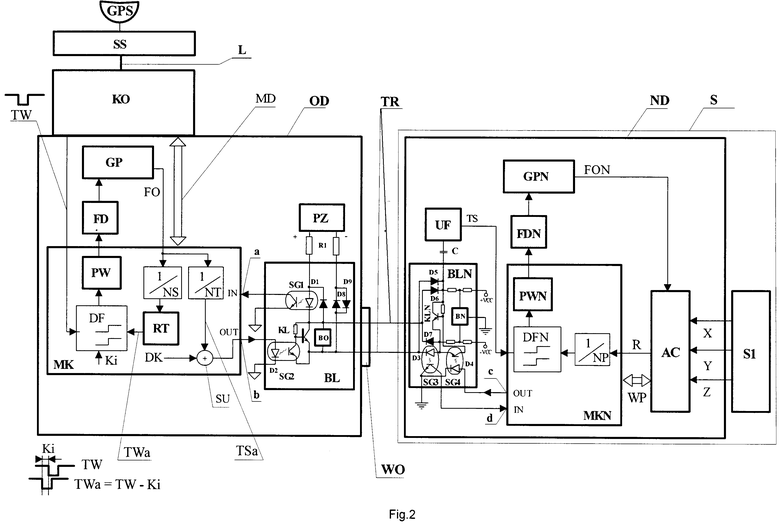
1. Способ синхронизации сейсмических и сейсмоакустических измерительных сетей, особенно шахтных искробезопасных сетей, отличающийся тем, что в каждом измерительном канале, состоящем из цифрового передатчика (ND) и цифрового приемника (OD), соединенных трансмиссионной линией (TR), используется для синхронизации время из часов GPS, а в каждом трансмиссионном канале периодически инициируется измерение временной корректировки (2Ki) прохождения сигнала от приемника (OD) до передатчика (ND) и обратно, от передатчика (ND) до приемника (OD), после чего в схеме фазовой автоподстройки частоты приемника (OD), содержащей часы внутреннего времени (RT), генерируется в качестве корректировки в непрерывном режиме сдвинутый секундный внутренний эталонный такт (TWa) с опережением по фазе на величину временной корректировки (Ki) по отношению к секундному эталонному такту (TW) часов (GPS) с одновременным опережением времени часов внутреннего времени (RT) на величину временной корректировки (Ki) и также в непрерывном режиме генерируется в (N) раз чаще, рекомендательно в 250 раз, внутренний синхронизирующий такт (TSa) с опережением по фазе на величину временной корректировки (Ki), в отношении к секундному эталонному такту (TW), осуществляющий манипуляцию выходом питающе-разделительного преобразователя (PZ), питающим искробезопасно телетрансмиссионную линию (TR), а посредством ее управляющий работой схемы фазовой автоподстройки частоты передатчика (ND), охватывающей обратной связью аналого-цифровой преобразователь (АС) с тем, чтобы готовность (R) аналого-цифрового преобразователя (АС) появлялась в (NP) раз, рекомендательно в 40 раз, чаще синхронизирующего такта (TS), между очередными импульсами синхронизирующего такта (TS) и один раз на число (NP) готовностей (R), рекомендательно на 40 готовностей, синхронно с этим тактом, а также на (Ν·NP), рекомендательно на каждые 10000 измерений, синхронно с односекундным эталонным тактом (TW), в результате чего в приемнике (OD) получают в каждый период синхронизирующего такта (TS) блоки измерительных данных (BNP) из дискретизации аналоговых составляющих от сейсмического датчика (S1) или от геофонного измерительного зонда (G1), затем реальное время дискретизации первой выборки в пакете данных, состоящем из (N) блоков измерительных данных (BNP) результатов измерений, принимаемое от часов внутреннего времени (RT) в момент (Т1) заднего фронта секундного эталонного такта (TW), который учитывает уже время запаздывания сигнала в телетрансмиссионной линии (TR), дополнительно корректируется путем программного вычитания постоянной величины корректирующей поправки времени, составляющей, рекомендательно, 8 мс, вытекающей из продолжительности комплектования в передатчике (ND) блока измерительных данных (BNP) результатов измерений, равной одному периоду синхронизирующего такта (TS) и продолжительности передачи результатов измерений, содержащихся в блоке измерительных данных (BNP) в виде цифровых выборок из передатчика (ND) в приемник (OD), равной также одному периоду такта (TS), синхронизирующего передатчик.
2. Способ по п. 1, отличающийся тем, что в приемнике (OD) программным образом реализуется схема фазовой автоподстройки частоты с использованием микроконтроллера (МК), программируют фазовый детектор (DF) с заданной величиной временной корректировки (Ki) секундного эталонного такта (TW), причем фазовый детектор (DF) управляет модулятором ширины импульса (PW), который через фильтр нижних частот (FD) управляет входом генератора, управляемого напряжением (GP), а выходной сигнал этого генератора после разделения программно настраиваемым делителем внутреннего времени (1/NS) тактирует аппаратные часы внутреннего времени (RT) микроконтроллера, в результате чего получают внутренний эталонный такт (TWa), сдвинутый по времени вперед на величину временной корректировки (Ki) по отношению к секундному эталонному такту (TW), равной времени запаздывания в телетрансмиссионной линии (TR), а в результате деления частоты (FO) генератора управляемого напряжением (GP) делителем внутреннего времени (1/NS) получают внутренний синхронизирующий такт (TSa), рекомендательно каждые 4 мс, передаваемый в передатчик (ND), который в (N) раз чаще, рекомендательно в 250 раз, чем сдвинутый секундный эталонный такт (TWa), синхронизирует работу передатчика (ND) с учетом в каждом трансмиссионном канале разной величины временной корректировки (Ki) импульсов сдвинутого секундного эталонного такта (TWa), происходящего от часов (GPS), причем эта корректировка вытекает из ранее выполненного автоматического измерения запаздывания в данной телетрансмиссионной линии (TR).
3. Способ по п. 1, отличающийся тем, что в передатчике (ND) импульсы синхронизирующего такта (TS), посылаемые из приемника (OD) и воспроизводимые в телетрансмиссионной линии (TR), управляют программно организованной в микроконтроллере передатчика (MKN) схемой фазовой автоподстройки частоты, охватывающей обратной связью аналого-цифровой преобразователь (АС), работу которого тактирует выходная частота (FON) генератора, управляемого напряжением (GPN), причем на вход этого генератора через фильтр нижних частот передатчика (FDN) подается сигнал, длина которого пропорциональна фазовой ошибке на выходе программируемого фазового детектора передатчика (DFN), сравнивающего фазу импульсов синхронизирующих тактов (TS) с импульсами, получаемыми в результате деления импульсов готовности (R) аналого-цифрового преобразователя, осуществляемого делителем синхронизирующего такта (1/NP), в результате чего получают на выходе передатчика (ND) последовательно по времени цифровой результат дискретизации аналоговых составляющих сигнала в виде блока измерительных данных (BNP) результатов измерений, синхронно с синхронизирующим тактом (TS), а во взаимодействующем приемнике (OD) цифровой результат в виде пакета данных, состоящего из блоков измерительных данных (BNP) результатов измерений, синхронно с секундным эталонным тактом (TW), каждый из которых был передан между очередными синхронизирующими тактами (TS).
4. Способ по п. 1, отличающийся тем, что для увеличения точности синхронизации дискретизации сигналов в канале приемника (OD) программно корректируется время дискретизации первой выборки пакета данных, состоящего из блоков измерительных данных (BNP), задаваемое часами внутреннего времени (RT) в момент (Т1) с дополнительным вычетом времени постоянной временной корректировки (Tac), равной сумме времени преобразования (Тр) и времени цифровой фильтрации (Tf).
5. Схема для синхронизации сейсмических и сейсмоакустических измерительных сетей, особенно шахтных искробезопасных сетей, состоящая из приемника с питающим преобразователем, искробезопасного защитного барьера, а также управляющего микроконтроллера с часами внутреннего времени, соединенными с часами GPS, которые соединены посредством телетрансмиссионной линии с передатчиком, содержащим цифровой управляющий микроконтроллер, аналого-цифровой преобразователь и искробезопасный защитный барьер, отличающаяся тем, что в линейном блоке (BL) приемника (OD) находится короткозамыкающий телетрансмиссионную линию (TR) полупроводниковый ключ (KL), соединенный через входную оптронную гальваническую развязку (SG2) линейного блока (BL) с выходом (b) микроконтроллера (МК), а в передатчике (ND) блок формирования (UF) синхронизирующего такта (TS) соединен через конденсатор (С) с линейным блоком передатчика (BLN), причем выход блока формирования (UF) соединен с одним из входов фазового детектора (DFN) микроконтроллера передатчика (MKN), а в линейном блоке передатчика (BLN) находятся оптронные гальванические развязки сигналов (SG3) и (SG4), причем управляющий диод (D3) выходной оптронной гальванической развязки (SG3) в линейном блоке передатчика (BLN) является, вместе с диодами (D5), (D6), (D7), элементом выпрямителя Гретца, соединяющего линейный блок передатчика (BLN) с телетрансмиссионной линией (TR), в то время как выход этой оптронной гальванической развязки (SG3) соединен с входом (d) данных микроконтроллера передатчика (MKN), а выход (с) данных микроконтроллера передатчика (MKN) соединен с управляющим диодом (D4) входной оптронной гальванической развязки (SG4) в линейном блоке передатчика (BLN), выход которого управляет полупроводниковым ключом передатчика (KLN), осуществляющим манипуляцию телетрансмиссионной линии (TR), а выход выходной оптронной гальванической развязки (SG1) линейного блока (BL) приемника (OD) соединен с входом (а) микроконтроллера (МК), тогда как управляющий диод (D1) этой оптронной гальванической развязки соединяет питающе-разделяющий преобразователь (PZ) с телетрансмиссионной линией (TR) через ограничитель тока, состоящий из резистора (R1) и диодов (D8) и (D9).
6. Схема по п. 5, отличающаяся тем, что приемник (OD) оборудован схемой фазовой автоподстройки частоты, которая содержит программно реализованный фазовый детектор (DF) с программно задаваемой временной корректировкой (Ki), аппаратный фильтр нижних частот (FD), соединенный с генератором, управляемым напряжением (GP), выход которого соединен с делителем внутреннего времени (1/NS), причем генератор, управляемый напряжением (GP), соединен с телетрансмиссионной линией (TR) через делитель внутреннего синхронизирующего такта (1/NT), сумматорный узел (SU) и линейный блок (BL) приемника (OD).
7. Схема по п. 5, отличающаяся тем, что передатчик (ND) оборудован схемой фазовой автоподстройки частоты, которая состоит из генератора импульсов с программно задаваемой шириной (PWN), аппаратного фильтра нижних частот передатчика (FDN), соединенного с генератором передатчика, управляемым напряжением (GPN), выход которого соединен с управляющим входом аналого-цифрового преобразователя (АС), а выход готовности (R) аналого-цифрового преобразователя (АС) соединен через делитель синхронизирующего такта (1/NP), определяющий число измерений, выполняемых между синхронизирующими тактами (TS), с одним из входов фазового детектора (DFN) передатчика (ND), причем второй вход детектора соединен с линейным блоком (BLN) передатчика (ND) через формирующую схему (UF) и конденсатор (С).
| Способ отливки вертлюгов якорных цепей | 1949 |
|
SU79341A1 |
| US 20090080290 A1 , 26.03.2009 | |||
| СПОСОБ СИНХРОНИЗАЦИИ УЗЛОВ БАЗОВОЙ СТАНЦИИ | 2007 |
|
RU2438247C2 |
| US 20120140594 A1, 07.06.2012 | |||
| СПОСОБ И СИСТЕМА ДЛЯ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2006 |
|
RU2418307C2 |

