Изобретение относится к точному приборостроению и может быть использовано для обследования в немагнитных буровых трубах нефтяных, газовых и геофизических скважин.
Известны способ и устройство для определения углов ориентации скважины, включающие установку в корпусе скважинного прибора трех феррозондов и трех акселерометров так, что их оси чувствительности образуют измерительную ортогональную систему координат, погружение скважинного прибора в скважину на заданную глубину, измерение компонентов полного вектора силы тяжести, измерение компонентов полного вектора геомагнитного поля, вычисление по полученным данным углов ориентации скважины (В.Х.Исаченко “Инклинометрия скважин”, Москва, “Недра”, 1987, стр.20-46).
Данный способ имеет недостаточно высокую точность измерения, поскольку не учитывает инструментальные погрешности датчиков.
Известны также способ и устройство для определения углов ориентации скважины, включающие установку в корпусе скважинного прибора трех феррозондов и трех акселерометров так, что их оси чувствительности образуют измерительную ортогональную систему координат, погружение скважинного прибора в скважину на заданную глубину, измерение компонентов полного вектора силы тяжести, измерение компонентов полного вектора геомагнитного поля, компенсацию инструментальных погрешностей феррозондов и акселерометров, вычисление по полученным данным углов ориентации скважины (Г.Н.Ковшов “Инклинометры”, Уфа “Гилем”, 1998, стр.51-68).
Данный способ также имеет недостаточно высокую точность измерения, поскольку не учитывает температурных погрешностей датчиков. Кроме того, оба этих способа имеют ограниченную область применения, так как не работоспособны в зоне муфт, соединяющих немагнитные буровые трубы, и обеспечивают достаточную точность измерения только в стационарных условиях, но даже при этом невозможно обеспечить неподвижность прибора в скважине, поскольку колебания скважинного прибора определяются рядом факторов, таких как выделение скважиной газа, прокачка бурового раствора и передаются через геофизический кабель с верхнего ролика, который в свою очередь раскачивается ветром. Кроме того, периодически возникает вращение скважинного прибора вокруг продольной оси, вызванное скручиванием-раскручиванием геофизического кабеля, при этом угловые скорости вращения даже при использовании центраторов и стабилизаторов достигают значительных величин порядка 60-70 (° /с), без центраторов и стабилизаторов порядка 300 (%), что приводит к существенным погрешностям акселерометров, вызванных центростремительным ускорением.
Наиболее близкими являются способ для измерения азимута скважины в процессе бурения, включающий установку в корпусе скважинного прибора трех феррозондов и трех акселерометров так, что их оси чувствительности образуют измерительную ортогональную систему координат, установку датчика температуры, погружение скважинного прибора в скважину на заданную глубину, многократное измерение серий компонентов полного вектора силы тяжести и компонентов полного вектора геомагнитного поля, причем компоненты в серии измеряются одновременно, либо в соседних сериях расположены в зеркальной последовательности, измерение температуры, компенсацию температурных погрешностей датчиков, вычисление в данной серии инвариантных значений, осреднение на такте работы инвариантных значений и вычисление по ним углов ориентации скважины, и инклинометр, содержащий наземный вычислитель, соединенный геофизическим кабелем со скважинным прибором, в корпусе которого установлены по соответствующим осям три феррозонда, три акселерометра, датчик температуры, мультиплексор, аналого-цифровой преобразователь, адаптер, микропроцессорный блок, тактовый генератор, арифметическо-логическое устройство, память данных и память программ, схема задержки, преобразователь тока и приемопередатчик (Патент США №4,894,923 МКИ Е 21 В 47/02, 1990 г.).
Данный способ не учитывает инструментальные погрешности датчиков, что снижает точность, и также не работоспособен в зоне муфт, что ограничивает его область применения, а данное устройство не позволяет ни за счет одновременного измерения, ни за счет зеркальной последовательности усреднить удары, которые возникают при движении скважинного прибора, что существенно снижает точность.
Целью изобретения является повышение точности и расширение области применения.
Поставленная цель достигается тем, что в способе определения углов ориентации скважины, включающем установку в корпус скважинного прибора трех феррозондов и трех акселерометров так, что их оси чувствительности образуют измерительную ортогональную систему координат, установку датчика температуры, погружение скважинного прибора в скважину, измерение компонентов полного вектора силы тяжести, измерение компонентов полного вектора геомагнитного поля, измерение температуры, компенсацию температурных погрешностей датчиков, дополнительно в корпусе скважинного прибора устанавливают датчик угловой скорости так, чтобы его ось чувствительности была направлена по продольной оси, осуществляют измерение угловой скорости вращения корпуса прибора по продольной оси ω z и измерение длины геофизического кабеля с коррекцией по магнитным меткам на геофизическом кабеле, компенсируют погрешность акселерометров, вызванную вращением скважинного прибора вокруг продольной оси, компенсируют погрешность установки акселерометров и феррозондов, вычисляют и контролируют измеренное значение ускорения силы тяжести gi, вычисляют элементы третьего столбца матрицы ориентации Аi:

где  - измеренные проекции вектора силы тяжести;
- измеренные проекции вектора силы тяжести;
вычисляют измеренное значение вертикальной составляющей геомагнитного поля  по формуле:
по формуле:

где  - измеренные проекции вектора геомагнитного поля;
- измеренные проекции вектора геомагнитного поля;
вычисляют значение горизонтальной составляющей геомагнитного поля  по формуле:
по формуле:

контролируют величину  при положительном результате определяют элементы первого столбца матрицы ориентации Аi по формулам:
при положительном результате определяют элементы первого столбца матрицы ориентации Аi по формулам:

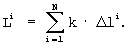
через алгебраические дополнения вычисляют остальные элементы матрицы ориентации Аi, при отрицательном результате фиксируют и в дальнейшем контролируют длину геофизического кабеля Li, вычисляют углы ориентации  по формулам:
по формулам:


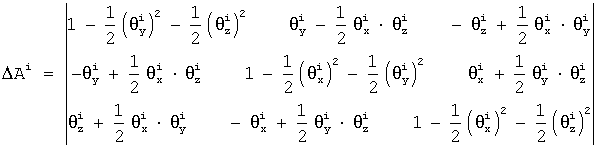
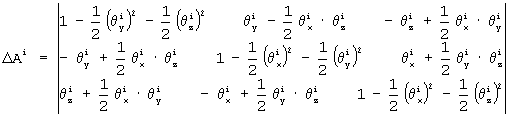
формируют приращение матрицы ориентации Δ Ai в виде:
вычисляют остальные элементы матрицы ориентации Аi путем матричного произведения:
Ai=Δ Ai·Ai-1
и вычисляют азимутальный α i и зенитный β i углы по формулам:

Кроме того, измерение длины геофизического кабеля и коррекцию по магнитным меткам производят следующим образом: на текущем такте осуществляют измерение приращения длины кабеля Δ li, приращение длины кабеля до метки  и фиксацию метки Мi, предварительно вычисляют эталонную длину
и фиксацию метки Мi, предварительно вычисляют эталонную длину  кабеля по формуле:
кабеля по формуле:
 где j=0,1,2... n; l1 - длина кабеля до первой метки; контролируют наличие метки, если Мi=0, то текущую длину кабеля вычисляют по формуле:
где j=0,1,2... n; l1 - длина кабеля до первой метки; контролируют наличие метки, если Мi=0, то текущую длину кабеля вычисляют по формуле:
где k - цена импульса блока измерения длины геофизического кабеля;
контролируют текущую длину кабеля:

при положительном результате фиксируют потерю коррекции и вычисляют следующее  если Мi>0, то текущую длину кабеля Li вычисляют по формуле:
если Мi>0, то текущую длину кабеля Li вычисляют по формуле:  и также контролируют текущую длину кабеля, при положительном результате корректируют текущую длину по формуле:
и также контролируют текущую длину кабеля, при положительном результате корректируют текущую длину по формуле:

а при отрицательном результате фиксируют наличие ложной метки и текущую длину кабеля вычисляют по формуле: 
В инклинометр, содержащий наземный вычислитель и скважинный прибор, содержащий три феррозонда, три акселерометра, датчик температуры и передатчик, дополнительно введен адаптер канала ввода и блок измерения длины геофизического кабеля, причем наземный вычислитель соединен с адаптером канала ввода, к которому подключен блок измерения длины геофизического кабеля и через геофизический кабель - скважинный прибор.
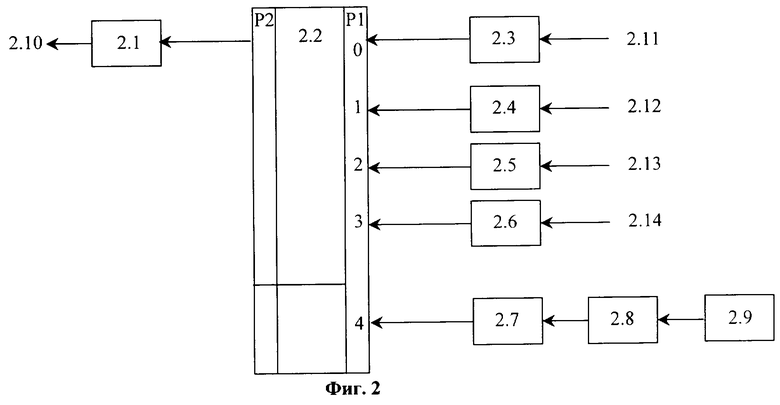
Кроме того, в скважинный прибор дополнительно введены датчик угловой скорости, семь преобразователей напряжение-частота и микроконтроллер, причем выходы акселерометров, феррозондов и датчика угловой скорости через преобразователи напряжение-частота подключены к соответствующим входам порта процессоров событий микроконтроллера, выход которого соединен с передатчиком, выход датчика температуры подключен к входу порта аналогового ввода микроконтроллера, выходом устройства является выход передатчика.
Кроме того, адаптер канала ввода содержит приемник, передатчик, микроконтроллер, четыре устройства гальванической развязки, преобразователь напряжение-частота и датчик тока, причем передатчик подключен к асинхронному последовательному порту микроконтроллера, к порту процессоров событий которого подключен приемник, другие входы порта процессоров событий соединены с выходами соответствующих устройств гальванической развязки, при этом к четвертому устройству гальванической развязки последовательно подключены преобразователь напряжение-частота и датчик тока, входами устройства являются входы первых трех устройств гальванической развязки и вход приемника, а выходом устройства - выход передатчика.
К существенным отличиям предложенного способа по сравнению с прототипом относится введение новых операций, а именно измерение угловой скорости вращения корпуса прибора по продольной оси и измерение длины геофизического кабеля с коррекцией по магнитным меткам, компенсации погрешностей акселерометров и феррозондов и соответствующих вычислений. К существенным отличиям от прототипа заявленного инклинометра относится введение в его схему новых элементов, т.е. адаптера канала ввода и блока измерения длины геофизического кабеля, с соответствующими связями, а также дополнение скважинного прибора новыми элементами. Это позволило повысить точность измерения углов ориентации скважины как за счет компенсации инструментальных погрешностей установки датчиков (не базы) и их температурных погрешностей, так и за счет компенсации погрешностей акселерометров, вызванных вращением скважинного прибора вокруг продольной оси, а также расширить область применения инклинометра за счет получения возможности измерения зенита и азимута в зоне муфт с фиксацией последних.
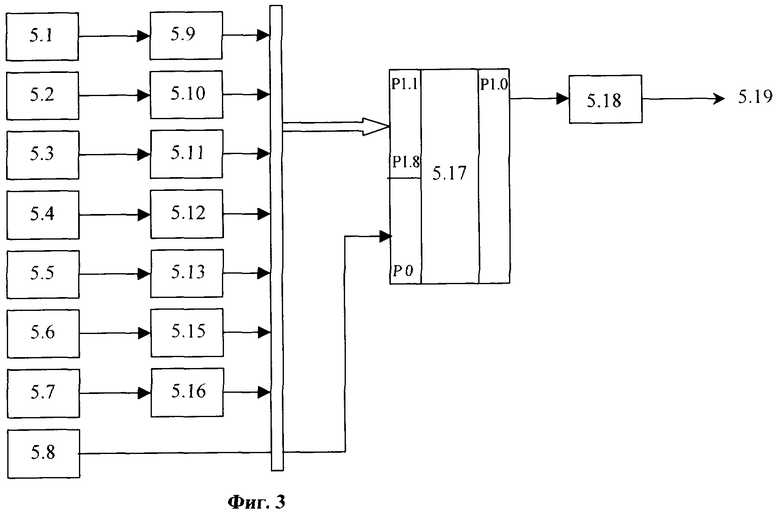
Сущность изобретения поясняется чертежами, где на Фиг.1 изображена блок-схема инклинометра, на Фиг.2 - блок-схема скважинного прибора, на Фиг.3 - блок-схема адаптера канала ввода.
На чертеже введены следующие обозначения:
1 - наземный вычислитель, например типа Notebook;
2- адаптер канала ввода, при этом:
2.1 -передатчик RS 232, например типа МАХ 232;
2.2 - микроконтроллер, например 87C196KR;
2.3 - приемник, его можно выполнить по любой известной схеме;
2.4... 2.7 - устройства гальванической развязки, например типа 249ЛП1;
2.8 - преобразователь напряжение-частота, например типа VEC 121;
2.9 - датчик тока, например резистор;
2.10 - выход устройства;
2.11... 2.14 - входы устройства;
3 - блок измерения длины геофизического кабеля, например типа ЛОТ-8;
4 - геофизический кабель;
5 - скважинный прибор, при этом:
5.1... 5.3- акселерометры, например типа AT 1104;
5.4... 5.6- феррозонды, например, типа ДФМ-1;
5.7 - датчик угловой скорости, например типа ENV-05F-03;
5.8 - датчик температуры, например, типа ТМР-03;
5.9... 5.16 - преобразователи напряжение-частота, например, типа AD 652;
5.17 - микроконтроллер, например типа 87C196KR;
5.18 - передатчик, его также можно выполнить по любой известной схеме;
5.19 - выход устройства.
Инклинометр (фиг.1) содержит наземный вычислитель 1, на информационный вход которого поступают сигналы от адаптера 2 канала ввода, который через геофизический кабель 4 соединен со скважинным прибором 5 и непосредственно с блоком 3 измерения длины геофизического кабеля 4.
Адаптер 2 канала ввода в свою очередь состоит из четырех входов 2.11-2.14, при этом вход 2.11 является входом приемника 2.3, а входы 2.12-2.14 являются входами трех устройств 2.4-2.7 гальванической развязки соответственно. Вход четвертого устройства 2.7 гальванической развязки соединен с выходом преобразователя 2.8 напряжение-частота, своим входом подключенного к выходу датчика 2.9 тока. Выходы всех устройств 2.4-2.7 гальванической развязки, а также выход приемника 2.3 подключены к соответствующим входам порта процессоров событий микроконтроллера 2.2, асинхронный последовательный порт которого подключен ко входу передатчика 2.1, при этом выход передатчика 2.1 является выходом 2.10 адаптера 2 канала ввода.
Далее скважинный прибор 5 (фиг.3) содержит акселерометры 5.1-5.3, феррозонды 5.4-5.6, датчик 5.7 угловой скорости, своими выходами подключенные к преобразователям 5.9-5.16 напряжение-частота, выходы которых, так же как и выход датчика 5.8 температуры, подключены к соответствующим входам порта процессоров событий микроконтроллера 5.17, выход которого соединен с передатчиком 5.18, при этом выход 5.19 передатчика 5.18 является выходом скважинного прибора.
В качестве базовой системы координат, относительно которой определяется угловое положение скважины, принята геофизическая система координат, в которой ось Z направлена по местной вертикали к центру Земли, ось Х лежит в плоскости горизонта и направлена на северный магнитный полюс, а ось Y направлена на восток.
Данный способ базируется на применении цифрового вычислителя, работающего в реальном масштабе времени, и основан на определении углов ориентации через матрицу направляющих косинусов или матрицу ориентации, которая связывает угловое положение измерительного трехгранника xП, yП, zП относительно сопровождающего геофизического трехгранника х, у, z следующим образом:

А - матрица направляющих косинусов или матрица ориентации для данного случая

или через ее элементы 
Предлагаемый способ можно представить в виде следующих действий и операций:
- На текущем i-том такте работы скважинным прибором 5 осуществляют измерение компонентов вектора силы тяжести  компонентов вектора геомагнитного поля
компонентов вектора геомагнитного поля  - угловой скорости поворота корпуса прибора вокруг продольной оси
- угловой скорости поворота корпуса прибора вокруг продольной оси  температуры ti, формирование байта контрольной суммы по mod 2 и выдачу адаптеру 2 канала ввода пакета данных с кодом байта состояния, кодами измеренных значений и байта контрольной суммы, а адаптером 2 канала ввода осуществляют измерение приращения длины кабеля Δ li, приращения длины кабеля до первой метки
температуры ti, формирование байта контрольной суммы по mod 2 и выдачу адаптеру 2 канала ввода пакета данных с кодом байта состояния, кодами измеренных значений и байта контрольной суммы, а адаптером 2 канала ввода осуществляют измерение приращения длины кабеля Δ li, приращения длины кабеля до первой метки  количества меток Мi и тока потребления Ji скважинного прибора 5, контроль времени такта работы, времени передачи и контрольной суммы, ретрансляцию полученного пакета с добавлением к нему собственного пакета с результатом контроля в соответствующих разрядах байта состояния и пересчитанного, с учетом собственного пакета, байта контрольной суммы наземному вычислителю 1 по интерфейсу типа RS-232.
количества меток Мi и тока потребления Ji скважинного прибора 5, контроль времени такта работы, времени передачи и контрольной суммы, ретрансляцию полученного пакета с добавлением к нему собственного пакета с результатом контроля в соответствующих разрядах байта состояния и пересчитанного, с учетом собственного пакета, байта контрольной суммы наземному вычислителю 1 по интерфейсу типа RS-232.
Наземный вычислитель 1 осуществляет прием данного пакета и контроль его по времени такта работы, времени передачи и контрольной сумме, анализ байта контроля и тока потребления, при отрицательном результате контроля и анализа, наземный вычислитель 1 фиксирует неисправность; при положительном результате приступает к дальнейшему выполнению программы.
Используются два режима работы, которые задаются оператором путем задания длины геофизического кабеля 4 Lj:
- “Транспортирование” - доставка скважинного прибора 5 в зону либо из зоны немагнитных буровых труб, при этом осуществляется только вычисление длины кабеля 4 и коррекция по магнитным меткам.
- “Измерение” - работа скважинного прибора 5 в зоне немагнитных буровых труб, при этом вычисляются и остальные параметры, исходная информация и вычисленные значения регистрируются в выходном файле.
Вычисление длины геофизического кабеля 4 Li и коррекция длины геофизического кабеля 4 по магнитным меткам в обоих режимах осуществляется следующим образом: предварительно вычисляют эталонную длину кабеля 4 по формуле:
 где j=0,1,2... n;
где j=0,1,2... n;
где l1 - длина кабеля 4 до первой метки, задается оператором, знак определяется по информации с блока 3 измерения длины геофизического кабеля 4; контролируют наличие метки: если Мi=0, то вычисляют текущую длину кабеля 4 по формуле:

где k - цена импульса блока 3 измерения длины геофизического кабеля 4; контролируют текущую длину кабеля 4:

при положительном результате фиксируют потерю коррекции;
если Мi>0, то текущую длину кабеля 4 вычисляют по формуле:

контролируют текущую длину кабеля 4:

при отрицательном результате фиксируют ложную метку, и текущая длина как и при Мi=0:

при положительном результате текущую длину кабеля 4 корректируют по формуле:

и вычисляют следующее значение Lj+1 э контролируют текущую длину кабеля 4:
при спуске Li≥L3 и при положительном результате переходят в режим “Измерение”;
при подъеме Li≤L3 и при положительном результате переходят в режим “Транспортировка”.
В режиме “Измерение” наряду с вычислением длины кабеля 4 с коррекцией по магнитным меткам наземный вычислитель 1 определяет текущую температуру по формуле:

где Кt - цена младшего разряда канала измерения температуры, [° С]
 - текущее значение кода данного канала,
- текущее значение кода данного канала,
N0 - нулевой сигнал этого канала;
затем вычисляют текущую угловую скорость поворота ω z с температурной компенсацией:

где Кω z - цена импульса этого сигнала [с-1];
 - температурная поправка цены импульса [° С-1];
- температурная поправка цены импульса [° С-1];
 - текущее значение кода данного канала;
- текущее значение кода данного канала;
 - нулевой сигнал этого канала;
- нулевой сигнал этого канала;
 - температурная поправка нулевого сигнала [° С-1];
- температурная поправка нулевого сигнала [° С-1];
далее вычисляют значение проекций ускорения gi по соответствующим осям с температурной компенсацией и компенсацией центростремительного ускорения по формуле:

где 
Кj - цена импульса соответствующего канала [мс-2];
 - температурная поправка цены импульса [° С-1];
- температурная поправка цены импульса [° С-1];
 - текущее значение кода соответствующего канала;
- текущее значение кода соответствующего канала;
 - нулевой сигнал данного канала;
- нулевой сигнал данного канала;
 - температурная поправка нулевого сигнала этого канала [° С-1];
- температурная поправка нулевого сигнала этого канала [° С-1];
 - поправка погрешности установки (плечо) [м].
- поправка погрешности установки (плечо) [м].
Затем осуществляют компенсацию погрешности установки акселерометров 5.1-5.3 (не база), например, способом идентичным указанному в аналоге (Г.Н.Ковшов “Инклинометры”). Эта процедура считается известной, поэтому здесь не рассматривается.
Далее осуществляют вычисление измеренного значения ускорения свободного падения gi по формуле:

и контроль этой величины:
g-Δ ≤ gi≤g+Δ , где
Δ - допустимое отклонение - задается оператором в зависимости от использования центраторов, либо нет, обсаженная скважина, либо открытый ствол и лежит в пределах 0,2-0,5 [мс2];
при отрицательном результате контроля фиксируется неисправность и выдается сообщение оператору.
При положительном результате вычисляют элементы третьего столбца матрицы ориентации Аi по формулам:

далее вычисляют значение проекций вектора геомагнитного поля по соответствующим осям с температурной компенсацией по формуле:

Кj - цена импульса соответствующего канала [Тл];
 - температурная поправка цены импульса [° С-1];
- температурная поправка цены импульса [° С-1];
 - текущее значение кода соответствующего канала;
- текущее значение кода соответствующего канала;
 - нулевой сигнал данного канала;
- нулевой сигнал данного канала;
 - температурная поправка нулевого сигнала этого канала [° С-1];
- температурная поправка нулевого сигнала этого канала [° С-1];
затем осуществляют компенсацию погрешности установки феррозондов 5.4-5.6 (не база), например, тем же способом, что и акселерометров 5.1-5.3.
Далее вычисляют измеренное значение вертикальной составляющей геомагнитного поля по формуле:

вычисляют значение горизонтальной составляющей геомагнитного поля по формуле:

контролируют величину 
b-Δ 1≤bi≤b+Δ 1, где
b - тангенс угла магнитного наклонения, const для данного места;
Δ 1 - величина допуска.
При положительном результате определяют элементы первого столбца матрицы ориентации Ai по формулам:

а расчет остальных элементов матрицы ориентации Аi производят через алгебраические дополнения по формулам:



При отрицательном результате контроля bi фиксируют это событие и текущую длину кабеля 4 Li, а поскольку приращение матрицы ориентации обусловлено малым конечным поворотом, который определяется тремя углами ориентации  при этом малость углов
при этом малость углов  обусловлена профилем скважины, а угла
обусловлена профилем скважины, а угла  - выбором достаточно малым времени τ такта работы, то вычисляют угол ориентации корпуса прибора 5 по оси Z:
- выбором достаточно малым времени τ такта работы, то вычисляют угол ориентации корпуса прибора 5 по оси Z:
 где τ - время такта работы;
где τ - время такта работы;
остальные углы ориентации вычисляют по формулам:


Рассматривая углы ориентации  в качестве углов поворота, которые переведут матрицу Аi-1 в матрицу Аi, вычислим соответствующую этим углам матрицу направляющих косинусов, раскладывая в ряд Тейлора элементы этой матрицы и удерживая в разложениях члены до второго порядка малости (что всегда допустимо при соответствующем выборе времени τ ) формируют приращение матрицы ориентации Δ Аi в виде:
в качестве углов поворота, которые переведут матрицу Аi-1 в матрицу Аi, вычислим соответствующую этим углам матрицу направляющих косинусов, раскладывая в ряд Тейлора элементы этой матрицы и удерживая в разложениях члены до второго порядка малости (что всегда допустимо при соответствующем выборе времени τ ) формируют приращение матрицы ориентации Δ Аi в виде:

вычисляют остальные элементы матрицы ориентации Аi путем матричного произведения:
Аi=Δ Аi·Аi-1,
вычисляют азимутальный α i и зенитный β i угол по формулам:
На последующих i+n тактах, кроме контроля величины bi+1, контролируют еще и длину геофизического кабеля 4:
 где LМ=const - зона муфты.
где LМ=const - зона муфты.
При положительном результате контроля считается, что это - муфта, при отрицательном результате выдается соответствующее сообщение оператору о магнитной аномалии.
Таким образом, введение новых действий и операций позволило повысить точность определения углов ориентации скважины как за счет компенсации инструментальных погрешностей установки датчиков (не база), компенсации температурных погрешностей датчиков, так и за счет компенсации погрешностей акселерометров, вызванных вращением скважинного прибора вокруг продольной оси, а также расширить область применения за счет возможности измерения зенита и азимута в зоне муфт, с фиксацией последних.
Инклинометр работает следующим образом:
На текущем такте работы скважинный прибор 5 осуществляет измерение компонентов вектора силы тяжести, компонентов вектора геомагнитного поля, угловой скорости поворота корпуса прибора 5 вокруг продольной оси, температуры, формирует байт контрольной суммы по mod 2 и выдает адаптеру 2 канала ввода пакет данных с кодом байта состояний, кодами измеренных значений и байтом контрольной суммы.
Адаптер 2 канала ввода осуществляет измерение приращения длины кабеля 4, приращение длины кабеля 4 до первой метки, количество меток и ток потребления скважинного прибора 5, контролирует время такта работы, время передачи и контрольную сумму, ретранслирует полученный пакет с добавлением к нему собственного пакета с результатом контроля в соответствующих разрядах байта состояния и пересчитанного, с учетом собственного пакета, байта контрольной суммы наземному вычислителю 1 по интерфейсу типа RS-232.
Наземный вычислитель 1 осуществляет прием данного пакета и осуществляет контроль его по времени такта работы, времени передачи и контрольной сумме, анализирует байт контроля и ток потребления, при отрицательном результате контроля и анализа, наземный вычислитель 1 фиксирует неисправность; при положительном результате приступает к дальнейшему выполнению программы.
В режиме “Транспортирование” наземный вычислитель 1 определяет только длину кабеля 4 и осуществляет коррекцию по магнитным меткам по информации с блока 3 измерения длины геофизического кабеля 4.
В режиме “Измерение” наземный вычислитель 1 наряду с вычислением длины кабеля 4 с коррекцией по магнитным меткам определяет текущую температуру, текущую угловую скорость поворота, производит ее температурную компенсацию, далее вычисляет значение проекций ускорения свободного падения по соответствующим осям также с температурной компенсацией и компенсацией центростремительного ускорения, затем осуществляет компенсацию погрешности установки акселерометров 5.1-5.3 (не база), производит вычисление измеренного значения геомагнитного поля с температурной компенсацией, затем осуществляет компенсацию погрешности установки феррозондов 5.4-5.6 (не база) и вычисляет углы ориентации скважины.
Исходная информация и вычисленные значения регистрируются наземным вычислителем 1 в выходном файле.
Скважинный прибор 5 решает следующие задачи:
- измерение компонентов полного вектора силы тяжести, которая решается акселерометрами 5.1-5.3 типа AT 1104;
- измерение компонентов полного вектора геомагнитного поля, которая решается феррозондами 5.4-5.6 типа ДФМ-1;
- измерение изменения угловой скорости вращения скважинного прибора 5 по продольной оси, которая решается датчиком 5.7 угловой скорости типа ENV-05F-03;
- измерение температуры скважинного прибора 5, которая решается датчиком 5.8 температуры типа ТМР-03;
- преобразование аналоговой информации с акселерометров 5.1-5.3, феррозондов 5.4-5.6 и датчика 5.7 угловой скорости в частоту, которая решается преобразователями 5.9-5.16 напряжение-частота типа AD652;
- формирование такта работы инклинометра, преобразование частоты с преобразователей 5.9-5.16 в код, кодирование и передача информации - данные задачи решаются микроконтроллером 5.17 типа AN87196KR, имеющим внутреннее однократно программируемое ПЗУ емкостью 32 кбайт, асинхронный последовательный порт, синхронный последовательный порт, блок процессоров событий, встроенное АЦП;
- гальваническую развязку и согласование с геофизическим кабелем 4, которая решается передатчиком 5.18, выполненным по любой известной схеме.
Основу скважинного прибора 5 составляет микроконтроллер 5.17 типа AN87196KR, при этом разряды p1.0 порта Р1 процессора событий запрограммированы на вывод, а остальные разряды порта процессоров событий запрограммированы на ввод, разряды р0.0 порта Р0 являются портом АЦП и также запрограммированы на вход.
При включении питания происходит инициализация микроконтроллера 5.17, т.е. начинает выполняться соответствующая программа, которая производит сброс соответствующих регистров, сброс ячеек ОЗУ в ноль, программирование портов и регистров управления, маскирование прерываний АЦП и блока процессоров событий, а также запускает таймер времени такта τ i работы скважинного прибора 5.
Аналоговое напряжение с датчиков поступает на соответствующий ПНЧ, на выходе которого возникают импульсы, частота которых пропорциональна напряжению входного сигнала. По приходу первого импульса на вход соответствующего разряда порта процессоров событий возникают прерывания, которые в соответствии со своим приоритетом начинают обрабатываться.
Обработка запроса прерываний по входам Р1.1-Р1.3 соответствующего измеряемым компонентам вектора силы тяжести ai заключается в инкрементировании содержимого основных ячеек ОЗУ соответствующих аi, и снятия данного запроса.
Обработка запроса прерываний по входу Р1.4-Р1.6 соответствующего измеряемым компонентам вектора геомагнитного поля fi заключается в инкрементировании содержимого основных ячеек ОЗУ соответствующих fi, и снятия данного запроса.
Обработка запроса прерывания по входу Р1.7 соответствующего измеряемой угловой скорости поворота корпуса прибора 5 вокруг продольной оси  заключается в инкрементировании содержимого основной ячейки ОЗУ соответствующей
заключается в инкрементировании содержимого основной ячейки ОЗУ соответствующей  и снятия данного запроса.
и снятия данного запроса.
При этом, в общем случае, приоритет любого данного запроса не играет существенной роли, лишь бы он был обработан, поскольку главное за такт работы τ i скважинного прибора 5 - общее количество импульсов, а не время их появления, а поскольку суммарное время обработки всех этих прерываний много меньше минимального периода любого этого запроса прерывания, то потери данного запроса, а следовательно, и потери информации не будет, в наихудшем случае этот запрос может быть обработан в следующем такте, τ i+1 т.е. с той же точностью ± один импульс, как и при любом другом способе измерения частоты.
Обработка запроса прерывания АЦП, имеющего более низкий приоритет, заключается в записи содержимого регистра АЦП в ячейку ОЗУ соответствующую данному каналу АЦП, маскирование прерывания АЦП, при этом суммарное время преобразования АЦП, также много меньше такта работы скважинного прибора 5 τ i, таким образом, в данном такте осуществляется однократное измерение напряжения с датчика 5.8 температуры.
Адаптер 2 канала ввода решает следующие задачи:
- контроль времени такта τ i работы скважинного прибора 5;
- прием и декодирование пакета данных скважинного прибора 5;
- контроль принятого пакета по времени передачи и контрольной сумме;
- гальваническую развязку и преобразование с соответствующих выходов блока 1 измерения длины кабеля 4 в коды приращения длины кабеля 4 Δ li, приращение длины кабеля 4 до метки  и количество меток Мi на данном такте τ i;
и количество меток Мi на данном такте τ i;
- измерение тока потребления Ji скважинного прибора 5;
- ретрансляцию по интерфейсу типа RS-232 принятого пакета данных скважинного прибора 5 с добавлением собственного пакета данных наземному вычислителю 1;
- прием с проверкой на достоверность и допустимость по интерфейсу типа RS-232 команд наземного вычислителя 1;
- кодирование и передачу команды наземного вычислителя 1 скважинному прибору 5;
Основу адаптера 2 канала ввода составляет микроконтроллер 2.2 типа AN87C196KR, при этом разряды р2.0 порта Р2 являются асинхронным последовательным портом и запрограммированы на вывод, разряды p1.0-p1.4 являются портом процессоров событий и запрограммированы на ввод.
При включении питания также происходит инициализация микроконтроллера 2.2, запускается таймер контроля времени такта τ i работы скважинного прибора 5, и размаскируются прерывания, запросы которых по времени появления начинают обрабатываться в соответствии со своими приоритетами.
Обработка запроса прерывания по входу Р1.1 соответствующего положительному приращению длины кабеля 4 блока 3 заключается в инкрементировании содержимого основных ячеек ОЗУ соответствующих Δ li и  и снятии данного запроса.
и снятии данного запроса.
Обработка запроса прерывания по входу Р1.2 соответствующего отрицательному приращению длины кабеля 4 блока 3 заключается в декрементировании содержимого основных ячеек ОЗУ соответствующих Δ li и  и снятии данного запроса.
и снятии данного запроса.
Обработка запроса прерывания по входу Р1.3 соответствующего магнитной метке блока 3 заключается в маскировании основной ячейки ОЗУ соответствующей  инкрементировании основной ячейки ОЗУ соответствующей количеству меток Mi и снятии данного запроса.
инкрементировании основной ячейки ОЗУ соответствующей количеству меток Mi и снятии данного запроса.
Обработка запроса прерывания по входу Р1.4, соответствующего измеряемому току Ji потребления скважинного прибора 5, заключается в инкрементировании основной ячейки ОЗУ соответствующей Ji и снятии данного запроса.
При этом, в общем случае, приоритет любого данного запроса не играет существенной роли, лишь бы он был обработан, поскольку главное за такт работы τ i адаптера 2 общее количество импульсов, а не время их появления, а поскольку суммарное время обработки всех этих прерываний много меньше минимального периода любого этого запроса прерывания, то потери данного запроса, а следовательно, и потери информации не будет, в наихудшем случае этот запрос может быть обработан в следующем такте τ i+1, т.е. с той же точностью ± один импульс, как и при любом другом способе измерения частоты.
Таким образом, введение новых связей и элементов, в частности ПНЧ, также позволяет повысить точность определения углов ориентации скважины за счет осреднения показаний акселерометров при ударах скважинного прибора во время его движения в скважине за такт работы скважинного прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2250371C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| Комплексный магнитометр-инклинометр для исследований скважин различного назначения | 2024 |
|
RU2831753C1 |
Изобретение относится к точному приборостроению и может быть использовано для обследования в немагнитных буровых трубах нефтяных, газовых и геофизических скважин. Сущность: способ определения углов ориентации скважины включает установку в корпус скважинного прибора трех феррозондов, трех акселерометров и датчика температуры, погружение скважинного прибора в скважину, измерение компонентов полного вектора силы тяжести и геомагнитного поля, измерение температуры и компенсацию температурных погрешностей датчиков. Кроме того, в корпус скважинного прибора дополнительно устанавливают датчик угловой скорости и измеряют угловую скорость вращения корпуса прибора по продольной оси и длину геофизического кабеля с коррекцией по магнитным меткам на нем, компенсируют погрешность акселерометров, вызванную вращением скважинного прибора вокруг продольной оси, и погрешность установки акселерометров и феррозондов, вычисляют и контролируют измеренное значение ускорения силы тяжести, а затем вычисляют матрицу ориентации скважины. Инклинометр содержит наземный вычислитель 1, соединенный с адаптером 2 канала ввода, который через геофизический кабель 4 соединен со скважинным прибором 5 и непосредственно с блоком 3 измерения длины геофизического кабеля 4. Адаптер содержит четыре входа, приемник, устройства гальванической развязки, преобразователь напряжение частота, датчик тока, передатчик и микроконтроллер. Скважинный прибор содержит акселерометры феррозонды, датчик угловой скорости датчик температуры, преобразователи напряжение-частота, микроконтроллер и передатчик. Технический результат: повышение точности измерений и расширение области применения. 2 н. и 3 з.п. ф-лы, 3 ил.


где  - измеренные значения проекций вектора силы тяжести;
- измеренные значения проекций вектора силы тяжести;
вычисляют измеренное значение вертикальной составляющей геомагнитного поля  по формуле:
по формуле:

где  - измеренные проекции вектора геомагнитного поля;
- измеренные проекции вектора геомагнитного поля;
вычисляют измеренное значение горизонтальной составляющей геомагнитного поля  по формуле:
по формуле:

контролируют величину  при положительном результате определяют элементы первого столбца матрицы ориентации Аi по формулам:
при положительном результате определяют элементы первого столбца матрицы ориентации Аi по формулам:

через алгебраические дополнения вычисляют остальные элементы матрицы ориентации Аi, при отрицательном результате фиксируют и в дальнейшем контролируют длину геофизического кабеля Li, вычисляют углы ориентации  по формулам:
по формулам:



формируют приращение матрицы ориентации Δ Аi в виде:
вычисляют остальные элементы матрицы ориентации Аi путем матричного произведения
Ai=Δ Ai·Ai-1,
вычисляют азимутальный α i и зенитный β i углы по формулам:

 и фиксацию метки Мi, предварительно вычисляют эталонную длину
и фиксацию метки Мi, предварительно вычисляют эталонную длину  кабеля по формуле:
кабеля по формуле:
где j=0,1,2... n; l1 - длина кабеля до первой метки; контролируют наличие метки, если Мi=0, то текущую длину кабеля вычисляют по формуле:

где k - цена импульса блока измерения длины геофизического кабеля, контролируют текущую длину кабеля:

при положительном результате фиксируют потерю коррекции и вычисляют следующее  если Мi>0, то текущую длину кабеля Li вычисляют по формуле:
если Мi>0, то текущую длину кабеля Li вычисляют по формуле:

и также контролируют текущую длину кабеля, при положительном результате корректируют текущую длину по формуле:

а при отрицательном результате фиксируют наличие ложной метки и вычисляют текущую длину кабеля по формуле:
| US 4894923 А, 23.01.1990 | |||
| US 4987684 A, 29.01.1991 | |||
| СПОСОБ ОЦЕНКИ ВЫНОСЛИВОСТИ СПОРТСМЕНА В ИГРОВЫХ ВИДАХ СПОРТА | 2016 |
|
RU2615899C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| ДВУХВАННЫЙ СТАЛЕПЛАВИЛЬНЫЙ АГРЕГАТ | 1990 |
|
RU2009418C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |

