ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к CVT, и конкретнее к CVT, имеющей приводной контроллер, приводящий в действие подвижный шкив для регулирования передаточного отношения.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Традиционные приводные механизмы снегохода включают непрерывно изменяемую трансмиссию (CVT), имеющую ведущий шкив, который функционально соединен с коленчатым валом двигателя, и ведомый шкив, соединенный с ведомым валом. Ведущий шкив действует в качестве сцепления и включает регулировочный механизм центробежного действия, посредством которого постепенно изменяется передаточное отношение CVT в зависимости от скорости двигателя и выходного крутящего момента на ведомом шкиве. Обычно ведомый вал представляет собой поперечный промежуточный вал, который приводит в движение входной элемент понижающей передачи из цепи и звездочки. Выход понижающей передачи соединен с одним концом оси, на которой расположены приводные звездочки приводной цепи.
Несмотря на то, что CVT центробежного действия обеспечивает много преимуществ, тот факт, что передаточное отношение CVT непосредственно относится к скорости двигателя, обуславливает определенные недостатки. Один такой недостаток заключается в том, что настройка ведущего шкива всегда связана с максимальным выходом мощности двигателя. Несмотря на то, что это приводит к высоким характеристикам ускорения снегохода, когда снегоход функционирует с эксплуатационной скоростью, это приводит к функционированию двигателя с более высокой скоростью, чем необходимо, высокому потреблению топлива, высоким уровням шума и большому количеству вибраций, передаваемых ездокам снегохода.
Уровень техники характеризует заявка на патент США №2011/0277577, которая раскрывает способ регулирования передаточного отношения с помощью принудительной CVT с регулируемым двигателем, чтобы имитировать гидростатическую трансмиссию и предотвращать чрезмерное натяжение приводного ремня, причем способ содержит этапы, на которых: обеспечивают номинальную скорость вращения источника мощности, используя принудительную CVT для передачи поворотного движения между источником мощности и приводным механизмом, регулируют крутящий момент источника мощности с возможностью поддержания по существу равномерной скорости вращения при изменении загрузки источника мощности и изменяют передаточное отношение принудительной CVT с возможностью изменения скорости вращения приводного механизма. Также обеспечена система и транспортное средство, имеющие такой механизм предотвращения чрезмерного натяжения приводного ремня.
Необходима CVT, имеющая приводной контроллер, приводящий в действие подвижный шкив для регулирования передаточного отношения. Настоящее изобретение удовлетворяет эту потребность.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Главный аспект изобретения состоит в обеспечении CVT, имеющей приводной контроллер, приводящий в действие подвижный шкив для регулирования передаточного отношения.
Другие аспекты изобретения будут отмечены или станут очевидными из следующего описания изобретения и сопровождающих чертежей.
Изобретение содержит CVT, содержащую вал, шарнирно соединенный с корпусом, первый шкив, прикрепленный к валу, второй шкив, подвижный параллельно оси вращения вал, причем второй шкив зафиксирован во вращательной связи с первым шкивом с помощью элемента первого шкива, взаимно зацепленного с принимающим элементом второго шкива, причем принимающий элемент второго шкива расположен под углом (НА) спирали в отношении оси вращения, звездочку, шарнирно соединенную с корпусом, причем звездочка зацеплена с помощью резьбы с подвижным элементом, причем между подвижным элементом и вторым шкивом расположен подшипник, причем подвижный элемент зацеплен с корпусом, в результате чего перемещение подвижного элемента является параллельным оси вращения, электропривод, зацепленный со звездочкой, причем второй шкив аксиально подвижен при вращении звездочки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи, которые включены и образуют часть описания, иллюстрируют предпочтительные варианты выполнения настоящего изобретения и вместе с описанием служат для объяснения принципов изобретения.
Фиг. 1 представляет собой вид в поперечном сечении по линиям 1-1 изобретательской трансмиссии на Фиг. 5.
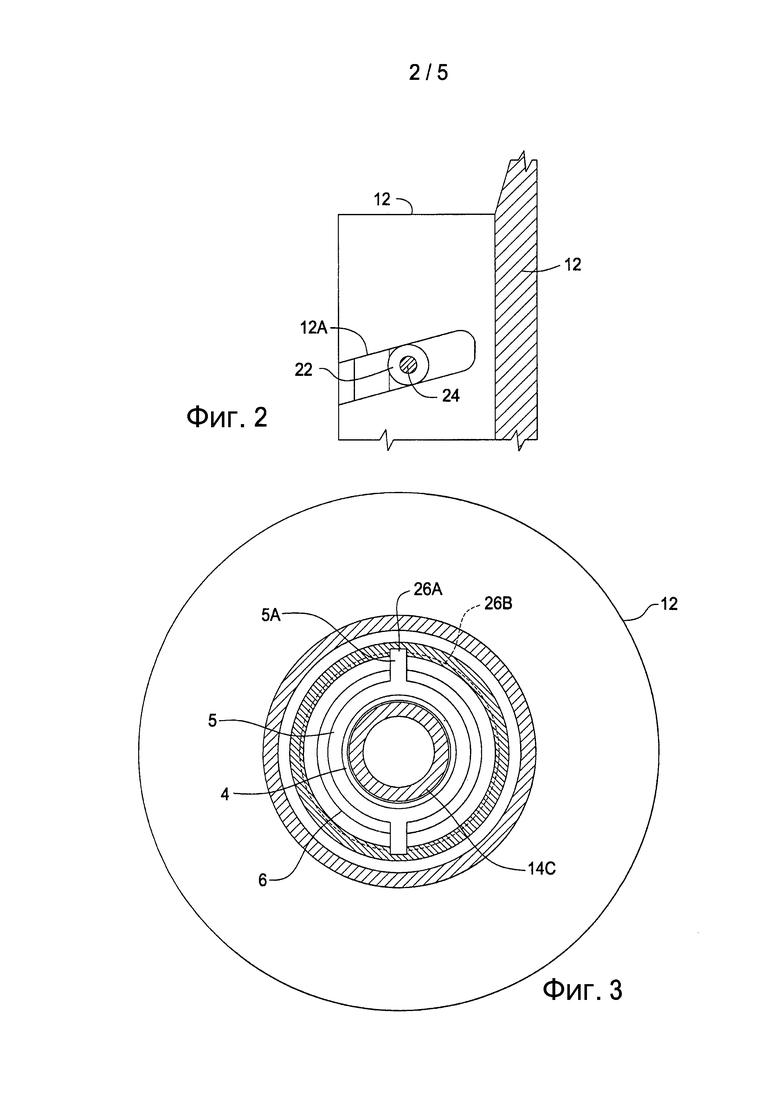
Фиг. 2 представляет собой вид местного разреза, взятого по линиям 2-2 на Фиг. 1.
Фиг. 3 представляет собой вид местного разреза, взятого по линиям 3-3 на Фиг. 1.
Фиг. 4 представляет собой фрагмент Фиг. 2, показывающий распределение силы.
Фиг. 5 представляет собой вид спереди изобретательской трансмиссии.
Фиг. 6 представляет собой схему управления системы CVT.
Фиг. 7 представляет собой схему управления системы CVT.
Фиг. 8 представляет собой схему управления системы CVT.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ВЫПОЛНЕНИЯ
Как показано на Фиг. 1, изобретение содержит входной вал 1, шарнирно соединенный с корпусом 4 с помощью подшипника 2. Корпус 4 содержит отверстия 4А, которые позволяют прикреплять трансмиссию к шасси (не показано) или другой раме с использованием крепежей (не показаны). Входной вал 1 вращается вокруг оси 1А вращения.
Входной вал 1 содержит шлицы 1В, которые передают крутящий момент сопряженным шлицам 14В шкива 14. В результате шкив 14 жестко установлен на конце вала 1 и вращается вместе с ним. Шкив 14 также содержит цилиндрический стержень 14С, который взаимно и коаксиально зацепляет вал 1 по его длине. Стержень 14С предпочтительно установлен с натягом так, что шкив 14 удерживается на валу 1.
Подвижный шкив 12 зацеплен с возможностью скольжения с внутренней поверхностью шкива 14. Втулка 20 с низким коэффициентом трения установлена с натягом на внутренней поверхности стержня 12В шкива 12. Втулка 20 скользит по внешней поверхности стержня 14С.
Как показано на Фиг. 1 и Фиг. 2, ролик 22 вращается вокруг пальца 24. Палец 24 жестко прикреплен к шкиву 14. Палец 24 выступает радиально внутрь от шкива 14 и является нормальным к оси вращения 1А вала 1. Подвижный шкив 12 содержит пазы 12А, которые направляют шкив вдоль роликов 22. В настоящем варианте выполнения этого изобретения имеются два ролика и два пальца, разнесенные на 180 градусов друг от друга на шкиве 14.
В альтернативном варианте выполнения ролик 22 может быть удален от пальца 24. Палец 24 покрыт материалом с низким коэффициентом трения для облегчения скольжения пальца 24 в пределах паза 12А. Для дополнительного облегчения скольжения пальца 24 в пределах паза 12А поверхности паза 12А также покрыты материалом с низким коэффициентом трения.
Двухрядный подшипник 8 с угловым контактом установлен с натягом на корпусе 4 и установлен с натягом в звездочку 6, позволяя звездочке 6 вращаться вокруг корпуса 4 и оси 1А. Второй двухрядный подшипник 16 с угловым контактом установлен с натягом на стержне 12В.
Труба 26 установлена с натягом над внешней дорожкой подшипника 16. Подшипник 16 закреплен в рабочем положении в трубе 26 с помощью упорного кольца 18.
Один конец трубы 26 содержит внутреннюю резьбу 26В, которая зацепляет взаимодействующую внешнюю резьбу 6В на звездочке 6.
Элемент 5 муфты неподвижно прикреплен к одному концу корпуса 4. Элемент 5 муфты содержит радиальные выступы 5А. Выступы 5А перемещаются в пределах взаимодействующих паза или пазов 26А, см. Фиг. 3. Пазы 26А образованы во внутреннем диаметре трубы 26. Пазы 26А продолжаются параллельно оси вращения 1А вдоль главной оси входного вала 1.
Ремень 10 проходит вокруг звездочки 6 и звездочки 32 электропривода 30, см. Фиг. 5. В предпочтительном варианте выполнения ремень 10 относится к зубчатому типу. Электропривод 30 предпочтительно установлен на шасси или раме (не показана). Клиновой ремень 36 зацеплен между шкивом 12 и шкивом 14.
ОПИСАНИЕ ФУНКЦИОНИРОВАНИЯ
Клиновой ремень 36 функционирует с радиусом R, как показано на Фиг. 5. Радиус R является изменяемым согласно аксиальному положению подвижного шкива 12. Когда расстояние между шкивами 12 и 14 уменьшается, радиус R увеличивается. Когда расстояние между шкивами 12 и 14 увеличивается, радиус R уменьшается. Изменение радиуса R изменяет передаточное отношение, то есть оно изменяет угловую скорость сцепления, соединенного с помощью ремня 36 с настоящим электронно-управляемым сцеплением CVT.
Изменение аксиального положения подвижного шкива 12 выполняют следующим образом. Электропривод 30 вращает звездочку 6 с помощью ремня 10. Внешняя резьба 6В вращается со звездочкой 6, будучи зацепленной со внутренней резьбой 26В трубы 26. При наличии их соединения с неподвижным корпусом 4 выступы 5А являются неподвижными. Выступы 5А взаимно перемещаются в пределах пазов 26А, когда труба 26 перемещается аксиально под воздействием вращения звездочки 6. Так как выступы 5А неподвижны, труба 26 лишена возможности вращаться вокруг оси 1А. Это приводит к тому, что резьбы 6В перемещают трубу 26 аксиально. Подшипник 16, зацепленный с трубой 26 и тем самым со шкивом 12, передает аксиальную силу. Аксиальное перемещение трубы 26 приводит к аксиальному перемещению шкива 12. Подшипник 16 позволяет шкиву 12 вращаться вокруг оси 1.
Ролик 22, прикрепленный к шкиву 14, передает крутящий момент от шкива 14 к шкиву 12. Относительное аксиальное перемещение между шкивом 14 и шкивом 12 частично определяется ориентацией паза 12А, которая направляет ролик 22. В предпочтительном варианте выполнения ориентация паза 12А является спиральной с углом НА спирали приблизительно 20 градусов, см. Фиг. 4. Угол НА спирали паза 12А способствует аксиальному перемещению шкива 12, тем самым приводя к более низким требованиям к мощности от электропривода 30, как описано здесь. НА может находиться в диапазоне от около 5 градусов до около 50 градусов.
Подвижный шкив 14 обычно может смещаться от неподвижного шкива 12 с помощью пружины (не показана). Приводу 30 должен быть придан размер с возможностью преодолевать силу смещения пружины. При помощи этой конструкции паза (пазов) 12А размер, мощность и/или стоимость привода 30 и/или их совокупности в общем могут быть уменьшены по сравнению с тем, когда паз (пазы) 12А в общем параллелен(ы) продольной оси 1А.
Как показано на Фиг. 4, вектор F1R силы, создаваемой нагрузкой при натяжении ремня 36 в точке контакта между роликом 22 и пазом 12А, содержит компонент F1N нормальной силы в отношении паза и компонент F1A аксиальной силы. Аксиальная сила F1A толкает шкив 12 по направлению к шкиву 14. Чем больше угол НА спирали, тем больше аксиальная сила F1A, что тем самым приводит к меньшему требованию к мощности от привода 30 с электрическим управлением для перемещения шкива 12 по направлению к шкиву 14.
Уменьшение расстояния между шкивом 12 и шкивом 14 требует, чтобы электропривод преодолевал радиальную силу ремня 36, которая старается раздвигать шкивы. Уменьшение размера электропривода 30 увеличивает выход мощности путем уменьшения излишних потерь мощности.
Фиг. 6 представляет собой схему управления системы CVT. Двигатель 300 и трансмиссия 100 соединены с помощью ремня 101 CVT, известного в уровне техники. Двигатель 300 содержит любой первичный привод, включая двигатель внутреннего сгорания. Сцепление 301 привода соединено с валом 303 двигателя. Приводное 102 сцепление соединено с трансмиссией 100, как описано на Фиг. 1.
Микроконтроллер 201 соединен с датчиком 204. Датчик 204 обнаруживает положение звездочки 10, см. Фиг. 1. Двигатель 202 для привода соединен с приводом 30. Источник мощности с напряжением 12 В постоянного тока соединен с микроконтроллером и двигателем для привода. Микроконтроллер 201 дополнительно соединен с двигателем 202 для привода, в результате чего микроконтроллер посылает сигнал управления двигателю для привода. Сигнал управления заставляет двигатель 202 для привода должным образом располагать звездочку 10, тем самым устанавливая требуемое передаточное отношение.
ECU и датчик 200 открытия дросселя и скорости обнаруживают и управляют функционированием двигателя известным в уровне техники образом. Микроконтроллер 201 обрабатывает сигнал от ECU 200 для того, чтобы определять подходящий сигнал управления для привода 30.
Фиг. 7 представляет собой схему управления системы CVT. Микроконтроллер 201 содержит микропроцессор 401; аналого-цифровой преобразователь 205, быстродействующие счетчики 206. Микропроцессор 401 может быть запрограммирован пользователем известным в уровне техники образом с возможностью программирования точек переключения трансмиссии на основании скорости двигателя. Портативный компьютер 500 или другое пригодное устройство ввода/вывода также может быть использовано для программирования и/или иной связи с микропроцессором 401. Датчик 204 и датчик 302 электронно связываются с контроллером 201. Силовая электроника 202, известная в уровне техники, снабжает энергией привод 30.
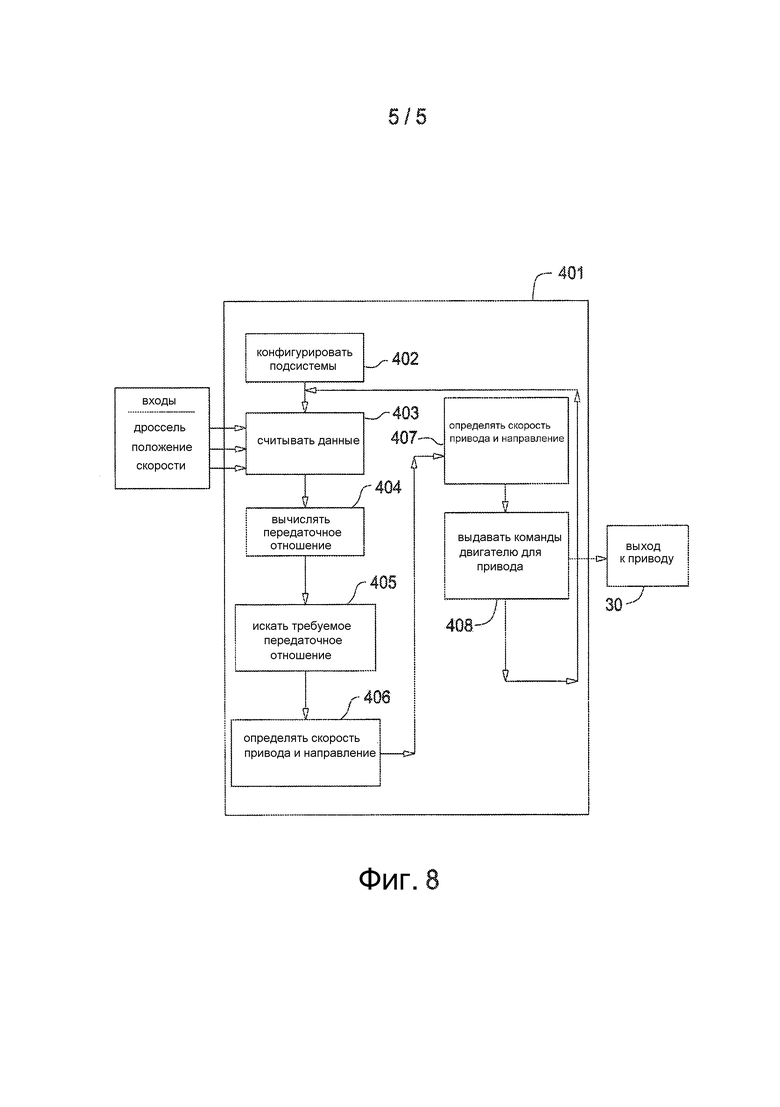
Фиг. 8 представляет собой схему управления системы CVT. Пользователь конфигурирует подсистемы 402 известным в уровне техники образом. Сигналы системы двигателя/трансмиссии являются входами микропроцессора на этапе 403. Сигналы двигателя включают степень открытия дросселя, обороты двигателя и положение шкива. Сигналы трансмиссии включают положение шкива и обороты. Микропроцессор вычисляет передаточное отношение на этапе 404. При наличии входов микропроцессор ищет требуемое передаточное отношение в справочной таблице 405. Примерная справочная таблица приведена ниже.

Справочная таблица может быть составлена пользователем с возможностью вмещать условия функционирования транспортного средства. Значения в справочной таблице являются исключительно примерами и не предназначены в качестве ограничений. Микропроцессор дополнительно определяет скорость привода 30 и направление 407. Микропроцессор подает сигналы 408 приводу 30, чтобы изменять положение звездочки 10 в зависимости от требуемого передаточного отношения. Далее система повторяет цикл до тех пор, пока не будут достигнуты требуемые условия функционирования.
Несмотря на то, что здесь был описан вариант выполнения изобретения, специалисту в области техники очевидно, что могут быть выполнены изменения конструкции и отношения частей без отклонения от замысла и объема охраны изобретения, описанного здесь.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУФТА ПРИВОДА БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2014 |
|
RU2622510C1 |
| ВЕДУЩИЙ ШКИВ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2016 |
|
RU2731191C2 |
| ПНЕВМАТИЧЕСКИ ПРИВОДИМАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2013 |
|
RU2653333C2 |
| ПЕРЕДАЧА И ПРИВОД ВСПОМОГАТЕЛЬНЫХ АГРЕГАТОВ С ПОСТОЯННОЙ СКОРОСТЬЮ | 2004 |
|
RU2315216C9 |
| ПРИВОД | 1999 |
|
RU2238193C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |
| ПРОГРЕССИВНЫЕ ТРАНСМИССИИ, БЕССТУПЕНЧАТЫЕ ТРАНСМИССИИ, СПОСОБЫ, УЗЛЫ, ПОДУЗЛЫ И ИХ КОМПОНЕНТЫ | 2013 |
|
RU2618553C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2680209C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2782720C1 |
| ГИБРИДНЫЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, В ЧАСТНОСТИ, ДЛЯ МОТОРОЛЛЕРА, И ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2334625C2 |



Изобретение относится к непрерывно изменяемой трансмиссии (CVT). CVT содержит вал (1), шарнирно соединенный с корпусом (4); первый шкив (14), прикрепленный к валу (1); второй шкив (12), подвижный параллельно оси вращения (1A) вала, звездочку (6), шарнирно соединенную с корпусом, электропривод (30), зацепленный со звездочкой. Второй шкив зафиксирован во вращательной связи с первым шкивом с помощью элемента (22) первого шкива, взаимно зацепленного с принимающим элементом (12A) второго шкива. Принимающий элемент второго шкива расположен под углом (11A) наклона винтовой линии в отношении оси вращения. Звездочка зацеплена с помощью резьбы (6B) с подвижным элементом (26), причем между подвижным элементом и вторым шкивом расположен подшипник (16). Подвижный элемент зацеплен (5A) с корпусом, в результате чего перемещение подвижного элемента является параллельным оси вращения. Второй шкив аксиально подвижен при вращении звездочки. Достигается упрощение управлением CVT. 3 н. и 11 з.п. ф-лы, 8 ил.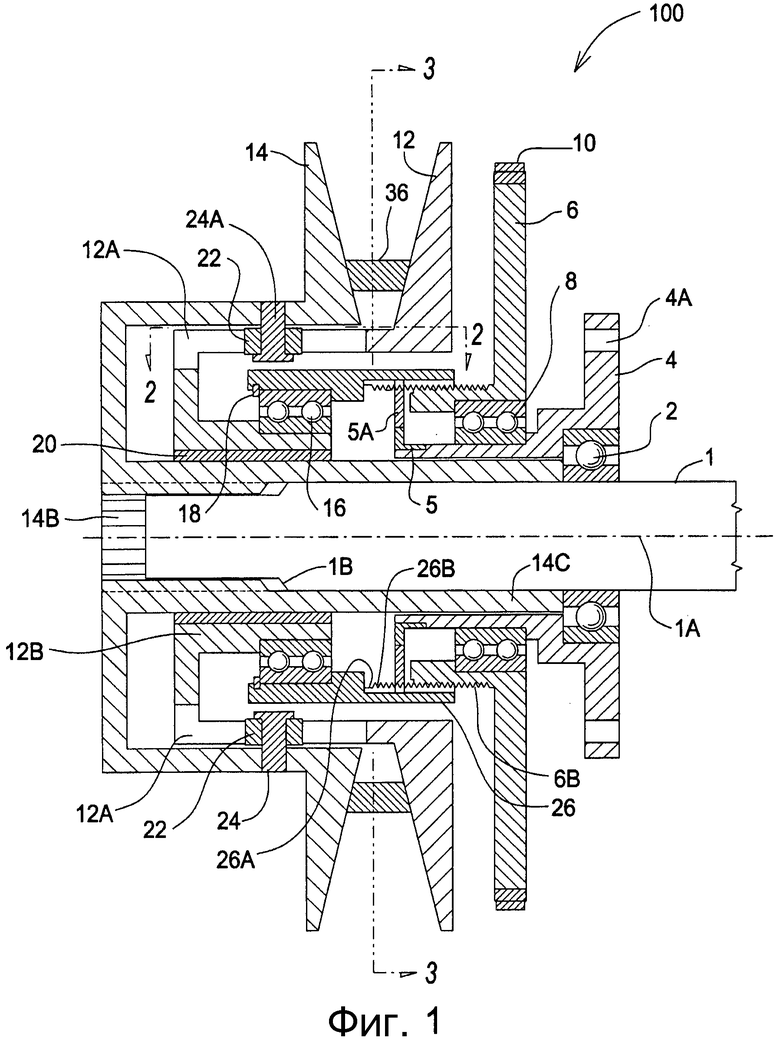
1. Трансмиссия CVT, содержащая:
вал (1), шарнирно соединенный с корпусом (4);
первый шкив (14), прикрепленный к валу (1);
второй шкив (12), подвижный параллельно оси вращения (1А) вала;
причем второй шкив зафиксирован во вращательной связи с первым шкивом с помощью элемента (22) первого шкива, взаимно зацепленного с принимающим элементом (12А) второго шкива, причем принимающий элемент второго шкива содержит паз, расположенный спирально под углом (НА) спирали относительно оси вращения;
звездочку (6), шарнирно соединенную с корпусом;
причем звездочка зацеплена с помощью резьбы (6В) с подвижным элементом (26), причем между подвижным элементом и вторым шкивом расположен подшипник (16);
подвижный элемент, зацепленный (5А) с корпусом, в результате чего перемещение подвижного элемента является параллельным оси вращения;
привод (30), зацепленный со звездочкой; и
причем второй шкив является аксиально подвижным под углом спирали при вращении звездочки.
2. Трансмиссия CVT по п.1, в которой угол спирали составляет приблизительно 20 градусов.
3. Трансмиссия CVT по п.1, в которой элемент первого шкива дополнительно содержит ролик, имеющий ось вращения (24А) ролика, которая является нормальной к оси вращения (1А) вала.
4. Трансмиссия CVT по п.1, в которой привод представляет собой двигатель.
5. Трансмиссия CVT по п.1, в которой подвижный элемент содержит паз, а корпус содержит радиальный выступ для зацепления паза.
6. Система сцепления для непрерывно изменяемой трансмиссии, причем система сцепления соединена с валом, который является вращаемым вокруг продольной оси, содержащая:
неподвижный шкив, соединенный с валом;
подвижный шкив, содержащий паз, расположенный спирально под углом (НА) спирали относительно вала и соединенный с возможностью перемещения с валом, причем подвижный шкив является подвижным по спирали относительно указанного неподвижного шкива;
позиционный привод, соединенный с подвижным шкивом и выполненный с возможностью перемещения указанного подвижного шкива ближе или дальше относительно неподвижного шкива; и
причем подвижный шкив и неподвижный шкив соединены с помощью паза.
7. Система сцепления по п.6, в которой угол спирали находится в диапазоне от около 5 градусов до около 50 градусов от продольной оси.
8. Система сцепления по п.7, в которой угол спирали составляет около 20 градусов при измерении от продольной оси.
9. Система сцепления по п. 6, в которой неподвижный шкив зацеплен с пазом с помощью ролика, расположенного в пределах паза.
10. Система сцепления по п.6, в которой привод зацеплен с подвижным шкивом с помощью ремня и системы зубчатого привода.
11. Транспортное средство, содержащее систему непрерывно изменяемой трансмиссии, в котором система непрерывно изменяемой трансмиссии содержит:
неподвижный шкив, соединенный с валом;
подвижный шкив, шарнирно присоединенный вокруг вала, причем подвижный шкив выполнен с возможностью перемещения ближе к или дальше от неподвижного шкива вдоль спиральной продольной оси вращения;
привод, соединенный с подвижным шкивом и выполненный с возможностью перемещения указанного подвижного шкива ближе к или дальше от неподвижного шкива; и
причем неподвижный шкив и подвижный шкив соединены пальцем и пазом, причем указанный паз по существу находится под углом спирали от указанной продольной оси вращения, причем подвижный шкив является подвижным по спирали относительно указанного неподвижного шкива.
12. Транспортное средство по п.11, в котором угол находится в диапазоне от в общем 5 градусов до в основном 50 градусов от продольной оси.
13. Транспортное средство по п.12, в котором угол составляет в основном 20 градусов от продольной оси.
14. Транспортное средство по п.11, в котором привод зацеплен с подвижным шкивом с помощью ремня и системы зубчатого привода.
| ЯЧЕЙКА ОДНОРОДНОЙ СРЕДЫ ПРОЦЕССОРНЫХ ЭЛЕМЕНТОВ | 2000 |
|
RU2177169C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЩИХ И ПОЛИЦИКЛИЧЕСКИХ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ В КОМПОНЕНТАХ ЭКОСИСТЕМЫ | 2015 |
|
RU2589897C1 |
| US 2011220453 A1, 15.09.2011 | |||
| Клиноременной вариатор | 1989 |
|
SU1703891A1 |
| Клиноременный вариатор скорости | 1983 |
|
SU1193336A1 |
| WO 2011111417, 15.09.2011.. | |||

