[0001] Данная заявка на патент притязает на приоритет предварительной заявки на патент США №61/475,994, поданной 15 апреля 2011 года под названием ″Система обратного рассеяния с матрицей датчиков с изменяемым размером″ и изобретателями Jeffrey R. Schubert и William Randall Cason, описание которой полностью включено в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к матрицам датчиков, а еще точнее к матрицам для регистрации обратнорассеянного проникающего излучения, такого как рентгеновские лучи.
УРОВЕНЬ ТЕХНИКИ
[0003] В уровне техники известно обследование объекта путем его освещения с использованием проникающего излучения. Часть излучения может проходить через объект, а часть может быть поглощена или отклонена объектом. Часть освещающего излучение, однако, будет рассеяна во всех направлениях, например обратно в общем направлении, от которого оно поступило, в данном случае рассеянное излучение может быть рассмотрено как обратнорассеянное излучение. Такое рассеянное излучение может проходить в датчик (который может быть назван в настоящей заявке как ″датчик рассеяния″, а некоторая часть этого рассеянного излучения будет зарегистрирована посредством датчика.
[0004] Существующие системы обследования объектов для применений в области безопасности, например, применяют датчики рассеяния, которые закреплены в положении относительно луча освещающего излучения или которые, после переориентации, противолежат по существу тому же самому пространственному углу относительно обследуемого объекта как до переориентации. Одна такая система с перенастраиваемыми датчиками рассеяния показана на фиг.5А и 5В патента США №5,764,683. Такие системы обследования, однако, выполнены для проведения обследования в конкретном диапазоне, порядка метра, конкретного класса объектов (а именно машин и грузовиков), которые обследуют по существу на фиксированном расстоянии относительно системы обследования. Такие системы обследования не могут обеспечить существенного изменения в зоне охвата матрицы датчиков при использовании для обследования, в частности, стесненного места или покрыть существенное изменение в расстоянии между системой обследования и обследуемым объектом. Последнее может быть необходимо в полевом применении, при котором обследуемый объект может быть размещен на существенном расстоянии от системы обследования.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0005] В первом примере реализации система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта содержит транспортер, выполненный с возможностью перемещения вдоль линии перемещения; источник остронаправленного луча проникающего излучения, соединенный с транспортером и имеющий ось излучения; матрицу датчиков с изменяемыми геометрическими характеристиками, которая содержит первый датчик, соединенный с транспортером и имеющий первый вектор выравнивания, параллельный линии перемещения, и второй датчик, соединенный с возможностью перемещения с транспортером, имеющий второй вектор выравнивания и выполненный с возможностью перемещения между первым положением и вторым положением, причем второй вектор выравнивания параллелен линии перемещения в первом положении, так что матрица представляет первый пространственный угол при наблюдении от точки на линии перемещения при нахождении второго датчика в первом положении и меньший пространственный угол при нахождении второго датчика во втором положении.
[0006] В некоторых примерах реализации второй датчик соединен с возможностью перемещения с транспортером посредством подвижного элемента. В некоторых примерах реализации подвижный элемент содержит рычаг, имеющий первый конец, соединенный с возможностью поворота с транспортером, и второй конец, соединенный со вторым датчиком.
[0007] В некоторых примерах реализации второй датчик содержит первый блок и второй блок, выполненный с возможностью складывания к лицевой стороне первого блока.
[0008] В некоторых примерах реализации подвижный элемент содержит корпус датчика, задающий второй вектор выравнивания, параллельный первому вектору выравнивания, и выполненный с возможностью перемещения относительно транспортера таким образом, что второй вектор выравнивания остается параллельным первому вектору выравнивания в первом и втором положениях. В некоторых примерах реализации корпус датчика выполнен с возможностью перемещения параллельно поверхности, на которой расположен транспортер, в некоторых примерах реализации корпус датчика выполнен с возможностью перемещения перпендикулярно поверхности, на которой расположен транспортер, и в некоторых примерах реализации корпус датчика выполнен с возможностью перемещения по диагонали относительно поверхности, на которой расположен транспортер.
[0009] В другом примере реализации система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта содержит транспортер; источник остронаправленного луча проникающего излучения, соединенный с транспортером; первый датчик, соединенный с транспортером и имеющий первое положение относительно источника излучения и первого вектора выравнивания; подвижный элемент, соединенный с возможностью перемещения с транспортером; и второй датчик, соединенный с подвижным элементом и имеющий второй вектор выравнивания, так что вектор выравнивания второго датчика выполнен с возможностью переориентации относительно вектора выравнивания первого датчика таким образом, что чувствительность системы к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй вектора выравнивания по существу параллельны друг другу.
[0010] В некоторых примерах реализации подвижный элемент содержит рычаг, имеющий первый конец, соединенный с возможностью поворота с транспортером, и второй конец, соединенный со вторым датчиком, так что рычаг выполнен с возможностью поворота между открытым положением, в котором второй вектор выравнивания параллелен первому вектору выравнивания, и втянутым положением, в котором второй вектор выравнивания не параллелен первому вектору выравнивания.
[0011] В некоторых примерах реализации второй вектор выравнивания перпендикулярен первому вектору выравнивания при нахождении второго конца во втянутом положении.
[0012] В некоторых примерах реализации второй датчик содержит первый блок и второй блок, выполненный с возможностью складывания к лицевой стороне первого блока.
[0013] В некоторых примерах реализации подвижный элемент содержит корпус датчика, задающий второй вектор выравнивания, параллельный первому вектору выравнивания, и выполненный с возможностью перемещения относительно транспортера, так что второй вектор выравнивания остается параллельным первому вектору выравнивания.
[0014] В некоторых примерах реализации корпус датчика выполнен с возможностью перемещения параллельно поверхности, на которой расположен транспортер, в некоторых примерах реализации корпус датчика выполнен с возможностью перемещения перпендикулярно поверхности, на которой расположен транспортер, а в некоторых примерах реализации корпус датчика выполнен с возможностью перемещения по диагонали относительно поверхности, на которой расположен транспортер.
[0015] В другом примере реализации способ обследования объекта с использованием обратнорассеянного излучения включает этапы использования транспортера, содержащего источник остронаправленного луча проникающего излучения; использования первого датчика обратнорассеянного излучения, имеющего постоянное положение относительно транспортера и имеющего первый вектор выравнивания; использования второго датчика обратнорассеянного излучения, соединенного с возможностью перемещения с транспортером и имеющего второй вектор выравнивания; ориентирования второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания; освещения объекта остронаправленным лучом излучения от источника; регистрации излучения, рассеянного источником с использованием первого и второго датчиков; генерирования первого изображения объекта с использованием данных, характеризующих излучение, рассеянное источником и зарегистрированное первым датчиком; и генерирования второго изображения объекта с использованием данных, характеризующих излучение, рассеянное источником и зарегистрированное вторым датчиком.
[0016] В некоторых примерах реализации способ также включает получение составного изображения путем объединения данных из первого изображения сданными из второго изображения.
[0017] В некоторых примерах реализации этап получения составного изображения путем объединения данных из первого изображения с данными из второго изображения включает получение динамически изменяемого изображения путем регулирования пропорции первого изображения и пропорции второго изображения, объединенных для получения составного изображения.
[0018] В некоторых примерах реализации этап ориентирования второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания, включает ориентирование второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания угла в правом углу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0019] Вышеописанные особенности примеров реализации будут более понятны из приведенного далее подробного описания со ссылой на прилагаемые чертежи.
[0020] На фиг.1 схематически показаны две системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками, расположенные вплотную к самолету.
[0021] На фиг.2 схематически показан датчик излучения и второй вектор выравнивания.
[0022] На фиг.3 схематически показан пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0023] На фиг.4А и фиг.4В схематически показаны примеры реализации систем обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0024] На фиг.5 схематически показан другой пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
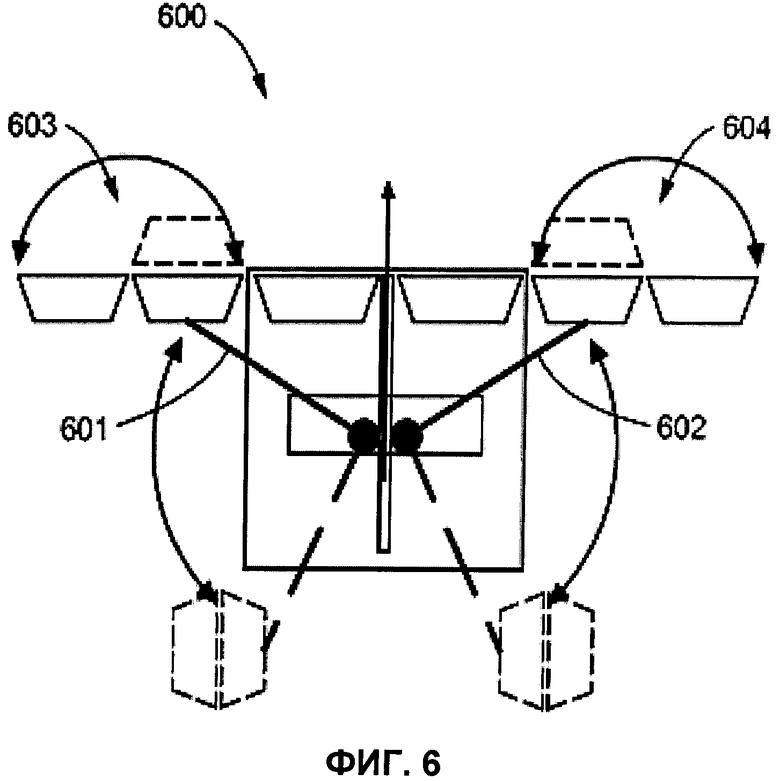
[0025] На фиг.6 схематически показан другой пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0026] На фиг.7А и фиг.7В схематически показаны примеры реализации систем обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
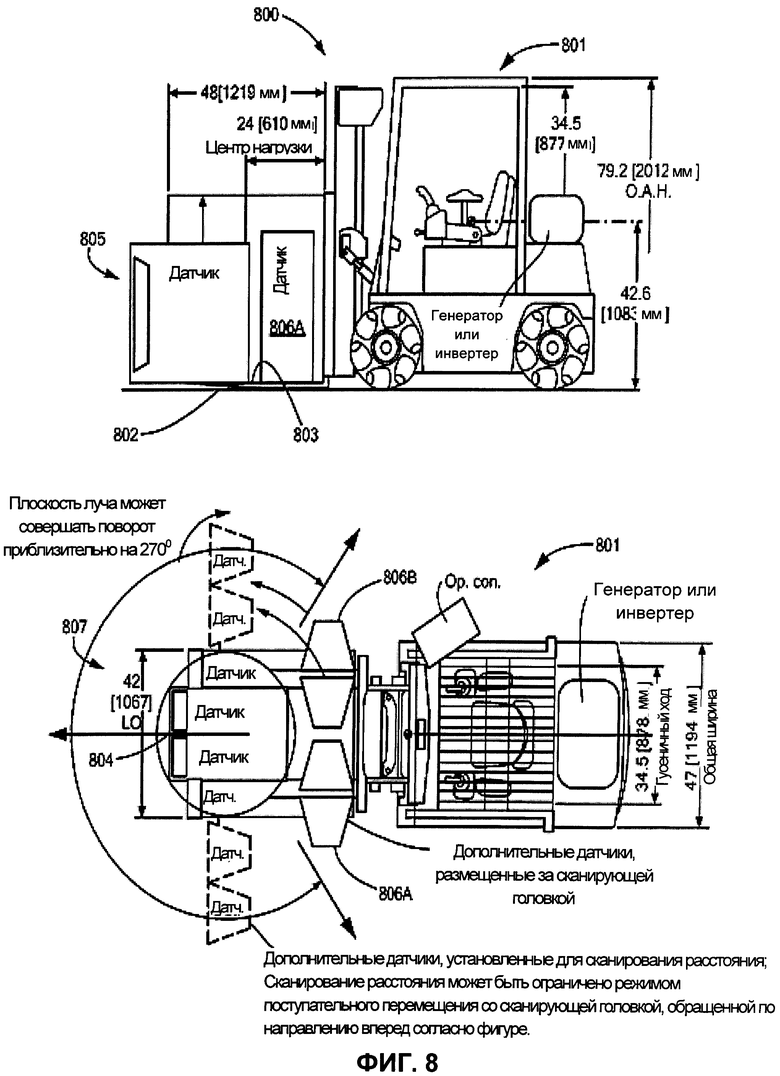
[0027] На фиг.8 схематически показан другой пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0028] На фиг.9 схематически показан другой пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0029] На фиг.10 схематически показан другой пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0030] На фиг.11A-11D показаны цифровые изображения объекта и различные изображения такого объекта, полученные посредством примера реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками.
[0031] На фиг.12 показана блок-схема, которая схематически иллюстрир способ обследования объекта.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0032] В соответствии с иллюстративными примерами реализации матрица датчиков выполнена для представления датчика обратнорассеянного излучения с изменяемыми геометрическими характеристиками. Для этого, матрица датчиков содержит множество датчиков обратнорассеянного излучения (″датчики″), которые могут изменять положения или ориентации относительно друг друга.
[0033] На фиг.1 схематически показаны две системы 101 и 102 датчиков обратного рассеяния, расположенные вплотную к небольшому воздушному судну 103. Каждая из систем 101 и 102 датчиков обратного рассеяния содержит источник проникающего излучения 104, 105, показанные в воздушном судне 103. Каждый источник 104, 105, может создавать узкий луч проникающего излучения, который может быть назван остронаправленным лучом проникающего излучения. Фактически, системы 101 и 102 выполнены идентичными, однако могут быть выполнены отличными друг от друга по фиг.1.
[0034] Система 102 будет подробно описана далее с пониманием того, что система 101 содержит те же самые компоненты. Согласно фиг.1, возможность для настройки систем 101 и 102 датчиков обратного рассеяния обеспечивает настройку системы 102 таким образом, что ее матрица датчиков представляет меньший профиль, чем матрица в системе 101. Таким образом, система 102 выполнена с возможностью перемещения ближе к плоскости 103 в узком пространстве между крылом 108 и фюзеляжем 109. Данная возможность находится в пределах объема полезных применений системы 102.
[0035] При работе системы 102, источник 104 освещает воздушное судно 103 с использованием проникающего излучения, причем часть освещающего излучения (″рассеянного″ или ″обратнорассеянного″ излучения) рассеяно обратно в общем направлении источника. В отличие от остронаправленного луча проникающего излучения, рассеянное излучение является многонаправленным. Таким образом, некоторое из рассеянного излучения проходит в датчики 106 и 107, которые вместе формируют матрицу 113 датчиков. Часть этого обратнорассеянного излучения может проходить через датчики 106 и 107 незарегистрированным, а часть обратнорассеянного излучения будет зарегистрирована этими датчиками.
[0036] В целом, чем больше пространственный угол датчика или датчиков при измерении от точки рассеяния, тем больше вероятность того, что обратнорассеянное излучение будет зарегистрировано. Таким образом, размеры датчика (или матрицы датчиков) могут влиять на чувствительность системы.
[0037] Соответственно, в описываемых различных примерах реализации и любых пунктах прилагаемой формулы изобретения может быть применено следующее определение: термин ″вектор выравнивания″ при использовании по отношению к датчику рассеянного излучения должен относится к направлению, заданному линейным геометрическим местом точек, проходящих по направлению наружу от датчика, относительно которого пространственный угол, стягиваемый объемом датчика при виде из точки обзора на линейном геометрическом месте точек, превышает пространственный угол при виде из любой другой точки в плоскости, которая расположена поперечно вектору в точке обзора.
[0038] В различных примерах реализации, описанных в настоящей заявке, вектора выравнивания различных датчиков излучения параллельны векторам выравнивания других датчиков и/или параллельны оси передачи остронаправленного луча проникающего излучения. Несмотря на то, что такая ориентация может максимизировать общую чувствительность соответствующих матриц, это не является необходимым ограничением. Например, если менее 100 процентной чувствительности от заданного датчика в матрице датчиков достаточно для заданного применения, то соответствующие вектора выравнивания могут быть ориентированы под углом, который больше нуля (то есть, векторы не параллельны). Таким образом, в некоторых примерах реализации ″вектор выравнивания″ может относиться к линии, которая пересекает геометрическое место точек согласно приведенному выше описанию под постоянным заданным углом.
[0039] Например, разрез 200 датчика проникающего излучения 201 схематически показан на фиг.2. Точка Р1 расположена в плоскости разреза и на геометрическом месте точек 202, проходящем наружу от датчика 201. Излучение, рассеивающееся (например, обратнорассеивающееся) из точки Р1 в плоскости разреза 200 достигнет датчика 201, если обратнорассеянное излучение находится в пределах 53 градусной дуги А1. Другими словами, все излучение в плоскости разреза 200 и в пределах дуги А1 пройдет в датчик 201, что обеспечит возможность его регистрации датчиком 201. Таким образом, точка Р1 может быть рассмотрена как точечный источник излучения, даже если фактически она представляет собой точку, от которой рассеяно падающее излучение. Таким образом, нет необходимости в установлении первичного источника проникающего излучения.
[0040] В отличие от этого, излучение, рассеивающееся из точки Р2, которая расположена на плоскости 203, поперечной геометрическому месту точек 202 в точке Р1 (на фиг.2, плоскость перпендикулярна разрезу и, таким образом, показана в качестве линии), достигнет только датчика 201, если его рассеяние происходит в пределах 45 градусной дуги А2.
[0041] Таким образом, пространственный угол, образованный объемом датчика 201 при виде из точки Р1 больше, чем пространственный угол, образованный объемом датчика 201 при виде из точки Р2.
[0042] Фактически, ни одна из всех точек в плоскости 203 не будет представлять пространственный угол, образованный объемом датчика 201, который больше, чем пространственный угол, представленный из точки Р1. Таким образом, геометрическое место точек 202 представляет собой вектор выравнивания в соответствии с вышеописанным определением.
[0043] Один пример реализации системы 300 датчиков обратного рассеяния схематически показан на фиг.3 и содержит основание или транспортер 301, который поддерживает другие элементы системы. На данной фигуре система 300 расположена на земле и отображена из точки над системой сверху вниз.
[0044] Транспортер 301 может быть приспособлен для облегчения мобильности и для этого может иметь колеса или гусеницы для взаимодействия с поверхностью, на которой размещена система. В альтернативном варианте транспортер 301 может представлять собой платформу, соединенную с основанием таким образом, что платформа может совершать перемещение независимо от основания.
[0045] Система 300 также имеет рентгеновский источник 302, который может создавать остронаправленный луч проникающего излучения согласно приведенному выше описанию. В данном примере реализации рентгеновский источник 302 соединен с транспортером 301 таким образом, что рентгеновский источник имеет постоянную пространственную связь с транспортером 301. Таким образом, при работе освещение объекта включает перемещение транспортера 301 таким образом, что рентгеновский источник 302 наведен в направлении объекта.
[0046] Система 300 также содержит два датчика 303 и 304, каждый из которых имеет соответствующий вектор выравнивания. Эти датчики 303 и 304, которые могут быть названы как ″первые датчики″, соединены с транспортером 301 таким образом, что каждый из них имеет постоянную пространственную связь с транспортером 301. Вместе первые датчики 303 и 304 формируют матрицу датчиков.
[0047] При работе, некоторое излучение, созданное рентгеновским источником 302, будет рассеяно освещенным объектом обратно в общем направлении датчиков 303 и 304 и будет последовательно зарегистрировано датчиками.
[0048] В некоторых примерах реализации данные, характеризующие регистрируемое обратнорассеянное излучение, затем поданы на компьютер (не показан) и обработаны с использованием специального программного обеспечения для получения изображения объекта. Для этого, система может иметь один или большее количество каналов передачи данных для передачи оцифрованных данных в память или процессор компьютера. Зарегистрированное излучение может быть оцифровано и передано на микропроцессор или с использованием канала передачи данных.
[0049] Чувствительность системы 300 будет по меньшей мере частично задана посредством датчиков 303 и 304. Однако часть обратнорассеянного излучения будет избегать регистрации датчиками 303 и 304, поскольку оно проходит мимо этих датчиков. Другими словами, рассеяние излучения, рассеивающегося обратно от точки на объекте, может происходить под углом за пределами пространственного угла, представленного объемом датчиков 303 и 304 при виде из этой точки. Таким образом, чувствительность системы 300 может быть улучшена путем управляемого добавления дополнительных датчиков для увеличения пространственного угла матрицы датчиков при виде из точки обратного рассеяния. Такая система может быть известна как система регистрации обратного рассеяния с изменяемыми геометрическими характеристиками.
[0050] Для этого, система 300 содержит два дополнительных датчика 305 и 306. Эти датчики могут быть известны как ″вторые″ датчики или ″дополнительные″ датчики. В данном примере реализации вторые датчики 305 и 306 подвижно соединены с транспортером 301 посредством соответствующих рычагов 307 и 308. Таким образом, несмотря на то, что вторые датчики 305 и 306 соединены с транспортером 301, они не имеют постоянное пространственное расположение относительно транспортера, поскольку их положение является изменяемым. Второй датчик 305, рычаг 307, шарнирное соединение 309 и точка 310 поворота будут описаны далее с пониманием того, что второй датчик 306, рычаг 308, шарнирное соединение 311 и точка 312 поворота функционируют таким же образом.
[0051] Рычаг 307 соединен с транспортером 301 посредством шарнирного соединения 309, которое обеспечивает возможность поворота рычага 307 (или вращения) вокруг точки 310 поворота. Таким образом, положение датчика 305 может быть отрегулировано таким образом, что он обращен к объекту. В некоторых ориентациях вектор выравнивания второго датчика 305 может быть расположен параллельно векторам выравнивания первых датчиков 303 и 304. В такой ″открытой″ конструкции (то есть, если вектора выравнивания первого и второго датчиков по существу параллельны) система 300 будет регистрировать большее количество обратнорассеянного излучения, чем могла бы зарегистрировать с использованием только первых датчиков 303 и 304. Согласно альтернативному варианту чувствительность системы 300 к излучению, рассеянному от объекта, по существу увеличена, если первый и второй вектора выравнивания по существу параллельны друг другу. В некоторых примерах реализации положение датчиков может быть отрегулировано таким образом, что вектор выравнивания каждого датчика имеет точку рассеяния.
[0052] Подвижный рычаг 307 также обеспечивает возможность возврата второго датчика 305 обратно в положение, в котором его вектор выравнивания не параллелен вектору выравнивания первых датчиков 303 и 304. В некоторых примерах реализации вектор выравнивания второго датчика 305 может формировать угол, составляющий приблизительно 80 или даже 90 градусов с вектором выравнивания первого датчика 303. В такой ″втянутой″ конструкции система 300 будет регистрировать меньше обратнорассеянного излучения, чем могло быть зарегистрировано с использованием второго датчика 305 в ″открытой″ конструкции. Во ″втянутой″ конструкции некоторое количество или все обратнорассеянное излучение может быть заблокировано или поглощено другими элементами системы 300, такими как первые датчики 303 или 304 или источник 302.
[0053] В некоторых примерах реализации вектора выравнивания вторых датчиков могут быть перпендикулярны векторам выравнивания первых датчиков при перемещении назад. В такой конструкции, которая проиллюстрирована посредством выделенных пунктиром рычагов (307′ и 3087) и датчиков (305′ и 306′) на фиг.3 и которая может быть известна как ″закрытая″ конструкция, чувствительность матрицы уменьшена (поскольку матрица сама по себе уменьшена) по сравнению с вышеописанным открытым положением, однако система выполнена также более компактной. После перемещения второго датчика (305 или 306) назад из его полностью открытого положения, канал передачи данных, соединенный с этим датчиком, может выйти из взаимодействия с этим датчиком. Например, канал передачи данных может быть физически отсоединен от датчика или он может быть электрически отключен или его связи могут быть переведены в состояние ожидания.
[0054] Система в закрытой конструкции может являться более простой для перемещения и может также обеспечивать возможность размещения этой системы ближе к объекту в стесненном месте, чем та же самая система в открытой конструкции. Например, углы 110 на пересечении крыла 108 и фюзеляжа 109 воздушного судна 103, схематически показанного на фиг.1, представляют неправильный контур для систем 101 и 102. Согласно фигуре, система 102 расположена ближе к воздушному судну 103, чем система 101. Таким образом, поскольку матрица датчиков 106, 107 системы 102 была выполнена меньшей по сравнению с матрицей, которая выполнена в системе 101, то система 102 выполнена с возможностью получения доступа к воздушному судну 103, которое может быть недоступно системе 101, которая выполнена в открытом положении. Фактически, поскольку система 102, как конструкция, может быть расположена ближе к углу 110, то датчики 106, 107 системы 102 могут представлять большой пространственный угол при виде из угла 110, чем могла бы матрица датчиков в системе 101, поскольку матрица датчиков 101 выполнена слишком широкой для маневрирования близко к такому углу 110. Другими словами, в некоторых применениях, меньшая матрица датчиков может представлять больший пространственный угол к точке исследования, чем большая матрица.
[0055] С другой стороны, матрица датчиков системы 101 может представлять пространственный угол (от точки на самолете 103), схожий с пространственным углом, представленным для системы 102, даже если система 101 расположена на расстоянии от самолета. Таким образом, система 101 может быть выполнена с возможностью регистрации равного количества обратнорассеянного излучения, как и система с меньшей матрицей, без необходимости расположения ближе к объекту.
[0056] Дополнительные примеры реализации схематически показаны на фиг.4А и 4В. На фиг.4А, система 400 расположена на земле и отображена из точки над системой 400 сверху вниз. Каждый из вторых датчиков 401, 402, 403 и 404 имеет вектор выравнивания и подвижно соединен с транспортером 405 в точках 406 и 407 поворота на сторонах 408 и 409 транспортера. Пары датчиков, таких как датчики 401 и 402, можно считать подматрицами, причем матрица может иметь вектор выравнивания. В одной конструкции матрица датчиков системы 400 может быть образована путем перемещения одного из датчиков 401, 402 (или подматрицы датчиков) в положение, в котором ее вектор выравнивания параллелен векторам выравнивания первых датчиков 410 и 411. В альтернативном варианте, размер матрицы датчиков может быть уменьшен путем перемещения одного из вторых датчиков 401, 402 в положение, в котором его вектор выравнивания не параллелен вектору выравнивания первых датчиков 410 и 411.
[0057] Система 420 схематически показана на фиг.4В расположенной на земле и отображенной в боковом профиле. Система 420 содержит второй датчик 421, прикрепленный с возможностью поворота к верхней части 422 транспортера. Второй датчик 421 показан в качестве одного блока, однако может также представлять собой подматрицу из различных датчиков. В одной конструкции матрица датчиков системы 420 может быть образована путем перемещения датчика 421 в положение, в котором ее вектор выравнивания параллелен вектору выравнивания первого датчика 424. В альтернативном варианте размер матрицы датчиков может быть уменьшен путем перемещения второго датчика 421 в положение, в котором ее вектор выравнивания не параллелен вектору выравнивания первого датчика 424.
[0058] В другом примере реализации 500 подматрицы могут быть сами выполнены с возможностью складывания, как схематически показано на фиг.5. Подматрица 501 содержит внутреннюю часть 502 (датчики 507 и 508), расположенную наиболее близко к транспортеру 504, и внешнюю часть 503 (датчики 505 и 506). В данном примере реализации каждая часть содержит два датчика, каждый из которых имеет соответствующий вектор выравнивания.
[0059] В открытом положении вектора выравнивания датчиков 505-508 параллельны друг другу и параллельны векторам выравнивания первых датчиков 509 и 510. В закрытом положении вектора выравнивания датчиков 505-508 не параллельны векторам выравнивания первых датчиков 509 и 510. Также, в закрытом положении датчики обращены друг к другу, что может быть названо ″двустворчатым″ положением, которое приводит к компактной ориентации. В данной конструкции вектора выравнивания вторых датчиков 505 и 506 могут быть параллельны друг другу, однако могут проходить в направлениях, противоположных векторам выравнивания датчиков 507 и 508.
[0060] Пример реализации 600, объединяющий поворотные рычаги 601, 602 (аналогичны показанным на фиг.3) и складные подматрицы 603, 604 (аналогичны показанным на фиг.5) схематически показаны на фиг.6.
[0061] Другие примеры реализации схематически показаны на фиг.7А и фиг.7В. В каждом случае матрицы вторых датчиков соединены с задней частью транспортера, расположенного на земле.
[0062] На фиг.7А система 700 отображена сверху. В данном примере реализации одна (701) или большее количество (702) вторых матриц могут быть прикреплены к каркасу (″раме″ 703, 704), которая соединена с возможностью перемещения с транспортером 705. Путем перемещения рамы (например, 703), датчики 702А, 702В могут совершать перемещение относительно транспортера в ″закрытом″ положении (верхнее изображение) или ″открытом положении″ (нижнее изображение) или в положении между указанными положениями. Для перемещения из закрытого положения в открытое положение одна или большее количество вторых матриц совершают перемещение по направлению наружу параллельно земле. В альтернативном примере реализации, также показанном на фиг.7А, рама и вторые матрицы могут совершать перемещение по диагонали - ни параллельно, ни перпендикулярно земле.
[0063] Во всех случаях вектора выравнивания датчиков 701А, 701В, 702А и 702В вторых матриц параллельны векторам выравнивания первых датчиков 706А и 706В, однако эффективный размер матрицы датчиков системы определен посредством положения вторых матриц. Даже если соответствующие вектора выравнивания первых и вторых датчиков параллельны друг другу независимо от положения вторых датчиков, то чувствительность матрицы датчиков системы вероятно больше при расположении матрицы вторых датчиков в открытом положении, поскольку в любом другом положении транспортер сам по себе способен повторно рассеивать или поглощать некоторую часть обратнорассеянного излучения, которое в противном случае может достигнуть вторых датчиков.
[0064] На фиг.7В система 720 отображена в боковом профиле, а вторая матрица 721 совершает перемещение по направлению вверх (то есть, перпендикулярно земле) из ″закрытого″ положения (нижняя иллюстрация) в ″открытое″ положение (верхняя иллюстрация).
[0065] Всенаправленный вилочный погрузчик 801 представляет собой транспортер в примере реализации 800, схематически показанном на фиг.8. Вилочный погрузчик 801 содержит подъемную платформу 802 с подъемной поверхностью 803 и может совершать перемещение по направлению вперед и назад аналогично обычному вилочному погрузчику, однако вилочный погрузчик 801 может также совершать перемещение в боковых направлениях. Например, для сканирования вдоль большого объекта вилочный погрузчик 801 может совершать перемещение в боковых направлениях в то время как источник 804 излучения и матрица датчиков 807 обращены к объекту.
[0066] Матрица датчиков 807 системы 800 содержит первые датчики 805, а также матрицы 806А и 806В вторых датчиков. Вторые датчики 806А и 806В подвижно соединены с транспортером 801 таким образом, что их положение или ориентация относительно первых датчиков 805 является изменяемой. Матрицы вторых датчиков 806А и 806В могут быть реализованы, например, вышеописанными способами.
[0067] Кроме того, матрица датчиков 807 вместе с источником 804 излучения, выполненным с возможностью проецирования остронаправленного луча проникающего излучения вдоль оси передачи, могут быть прикреплены с возможностью поворота к подъемной платформе 802 вилочного погрузчика, так что они могут совершать поворот вокруг оси по нормали к подъемной поверхности 803 подъемной платформы 802, а датчики 805, 806А и 806В и источник 804 излучения поддерживают постоянное пространственное расположение по отношению друг к другу.
[0068] Таким образом, ось передачи и оси выравнивания датчиков 805, 806А и 806В могут быть повернуты относительно подъемной платформы 802 для обеспечения возможности их ориентирования или переориентирования по отношению к объекту без необходимости перемещения всей системы 800. В данном примере реализации плоскость лучей/ось передачи могут совершать поворот приблизительно на 270 градусов. Например, источник 804 излучения и матрица датчиков 807 могут быть повернуты во время операции сканирования без необходимости перемещения вилочного погрузчика 801.
[0069] Еще один пример реализации 900 схематически показан на фиг.9. Система 900 содержит поворотную платформу 901, поддерживающую источник 902 излучения, который создает остронаправленный луч проникающего излучения вдоль оси 903 передачи, а также набор первых датчиков 904А, 904В, 904С и 904D. Каждый из первых датчиков 904A-904D имеет вектор выравнивания, а вместе они формируют первую матрицу 907, которая также имеет вектор выравнивания.
[0070] Источник 902 излучения и первая матрица 907 имеют постоянное положение относительно друг друга, однако могут совершать поворот относительно транспортера 905 вокруг оси, расположенной по нормали к поверхности поворотной платформы 901. Некоторые примеры реализации содержат подъемное приспособление 906, такое как рычажный подъемник, между транспортером 905 и поворотной платформой 901 для обеспечения возможности подъема поворотной платформы 901 по отношению к транспортеру 905.
[0071] Система 900 также содержит вторую матрицу 908, содержащую два вторых датчика 909А и 909В. Каждый из вторых датчиков 909А и 909В по отдельности и вторая матрица 908 имеют вектор выравнивания. Вторые датчики 909А и 909В соединены с транспортером 905 и имеют постоянное пространственное расположение относительно транспортера 905.
[0072] При работе, первая матрица 907 может быть повернута таким образом, что ее вектор выравнивания параллелен вектору выравнивания второй матрицы 908. Таким образом, первые и вторые матрицы могут формировать большую матрицу системы. Пространственный угол объединенных матриц при виде из точки обратного рассеяния больше, чем пространственный угол, представленный посредством только первой матрицы 907, так что матрица системы может быть сформирована путем поворота первой матрицы 907, так что ее вектор выравнивания параллелен вектору выравнивания второй матрицы 908.
[0073] Другой пример реализации 1000 схематически показан на фиг.10 и содержит транспортное средство (или транспортер) 1001, содержащее первый датчик 1002 и рентгеновский источник 1003, установленный во внутренней части транспортного средства 1000. В данном положении первый датчик 1002 выполнен с возможностью регистрации обратнорассеянного излучения от целевого автомобиля 1004.
[0074] В данном примере реализации, транспортное средство 1000 также содержит второй датчик 1005, размещенный на крыше транспортного средства 1000. Второй датчик 1005 может быть защищен влагонепроницаемым корпусом 1007.
[0075] Второй датчик 1005 может быть дополнительно и контролируемым образом ориентирован с тем, чтобы стать частью матрицы датчиков 1006 вместе с первым датчиком 1002 или перемещен в исходное положение 1005S, как указано штриховым контуром датчика 1005. Второй датчик может быть назван как ″нисходящий датчик″, ″крыльевой датчик″ или ″навесной датчик″.
[0076] Второй датчик может быть ориентирован во множестве положений относительно транспортного средства и/или относительно первого датчика. В некоторых примерах реализации второй датчик 1005 подвижно скреплен с транспортным средством, так что второй датчик 1005 может быть ориентирован из исходного положения 1005S в подвешенное положение 1005А путем перемещения второго датчика.
[0077] В других примерах реализации второй датчик 1005 может быть скреплен с возможностью поворота с транспортным средством 1000, так что второй датчик 1005 может быть повернут во множество положений. Например, в таких примерах реализации второй датчик 1005 может быть повернут в вертикальное положение 1005V, которое указано двунаправленной стрелкой 1008, таким образом, что его вектор выравнивания параллелен вектору выравнивания первого датчика 1003. В некоторых примерах реализации лицевая сторона 1005F второго датчика может быть расположена в одной плоскостью с лицевой стороной 1003F первого датчика. Второй датчик 1005 может также быть повернут в исходное положение 1005S.
[0078] В альтернативном варианте второй датчик 1005 может быть повернут в подвешенное положение 1005А таким образом, что его вектор выравнивания перпендикулярен и может даже пересекать вектор выравнивания первого датчика 1003. Кроме того, второй датчик может быть повернут на любой необходимый угол между подвешенным положением 1005А и исходным положением 1005S.
[0079] Таким образом, второй датчик обеспечивает возможность оператору системы регулировать размер и форму матрицы датчиков в зависимости, например, от размера целевого транспортного средства и доступного габарита по высоте, а также в зависимости от расстояния между матрицей и объектом.
[0080] Размещенный по горизонтали, как схематически показано в качестве положения 1005А на фиг.10, второй датчик обеспечивает различные преимущества. Например, общий пространственный угол матрицы датчиков 1006 увеличен по сравнению с пространственным углом только первого датчика (приблизительно на коэффициент, равный двум, для геометрических характеристик, показанных на фигуре 10), который увеличивает поток (приблизительно пропорционально пространственному углу) и общее соотношение сигнал-шум изображения, полученного из зарегистрированного обратнорассеянного излучения.
[0081] Кроме того, проникновение улучшено сверх того, что можно было бы ожидать от улучшенного соотношения сигнал-шум. Рентгеновские лучи, которые рассеиваются под углами, которые ближе к  , чем к
, чем к  (то есть рентгеновские лучи, которые представляют собой больше боковое рассеяние, чем обратное рассеяние) будут иметь более высокие энергии. Таким образом, по отношению к обследованию машины 1004, например, и рассеянное излучение лучше выходит из металлического и стеклянного корпуса машины 1004. Крыша и крышка богажника машины в целом выполнены из тонкой стали по сравнению со сторонами, что дополнительно улучшает возможность выхода рассеянных рентгеновских лучей и возможность достижения ими второго датчика. Кроме того, тени, созданные эффективным освещением сверху (то есть, изображение, полученное из зарегистрированного рассеянного излучения, похоже на фотографию, которая была освещена сверху), могут улучшать и обеспечивать лучшую возможность распознавания объектов путем использования теней для выделения трехмерных особенностей.
(то есть рентгеновские лучи, которые представляют собой больше боковое рассеяние, чем обратное рассеяние) будут иметь более высокие энергии. Таким образом, по отношению к обследованию машины 1004, например, и рассеянное излучение лучше выходит из металлического и стеклянного корпуса машины 1004. Крыша и крышка богажника машины в целом выполнены из тонкой стали по сравнению со сторонами, что дополнительно улучшает возможность выхода рассеянных рентгеновских лучей и возможность достижения ими второго датчика. Кроме того, тени, созданные эффективным освещением сверху (то есть, изображение, полученное из зарегистрированного рассеянного излучения, похоже на фотографию, которая была освещена сверху), могут улучшать и обеспечивать лучшую возможность распознавания объектов путем использования теней для выделения трехмерных особенностей.
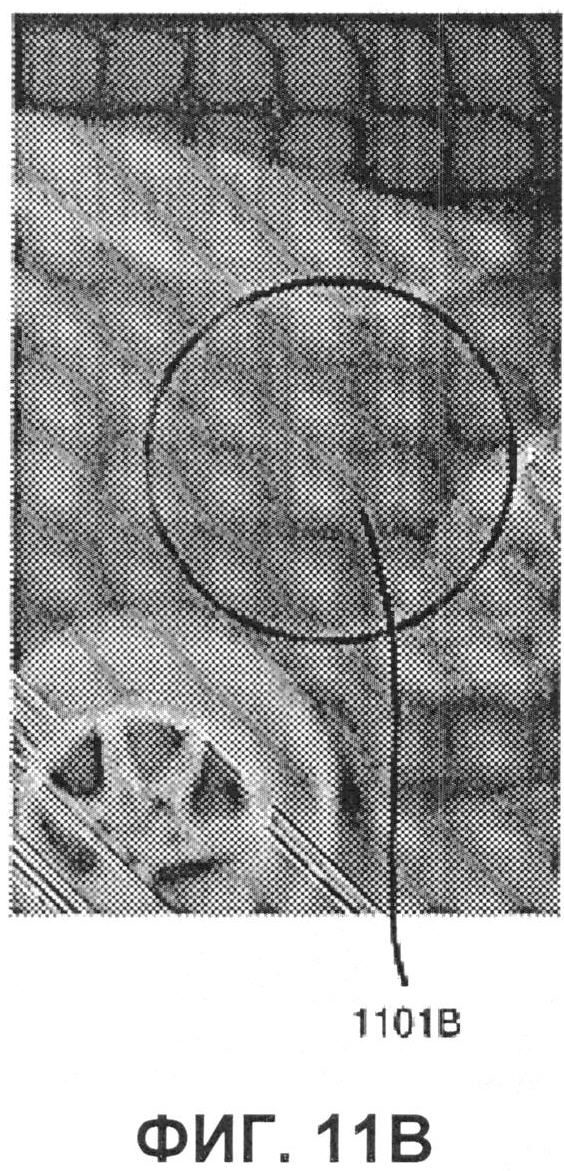
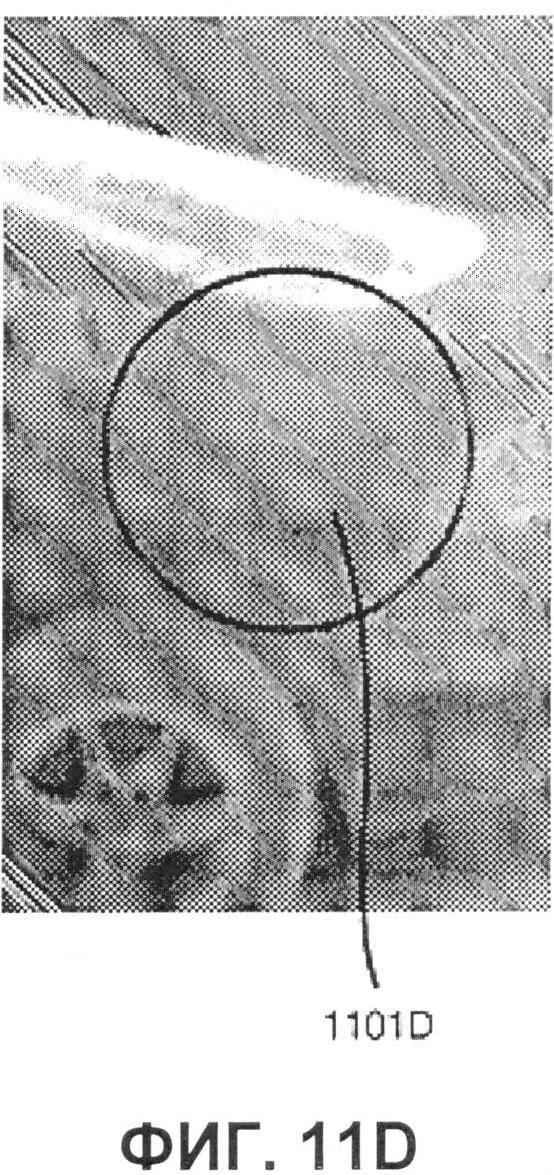
[0082] Цифровое изображение на фиг.11А-11D иллюстрируют возможности такого примера реализации. В частности, эти фиг.11B-11D были получены с использованием второго датчика для улучшения изображения бака 1001 с пропаном в багажнике 102 машины, согласно чертежу на фотографии по фиг.11А. Баки с пропаном в целом и большинство угроз глубоко в багажниках машин рассматривают в качестве задач, требующих решения для получения обычных изображений обратным рассеянием.
[0083] Вышеописанные теневые эффекты могут быть в дальнейшем использованы путем обработки сигнала от первого датчика и сигнала от второго датчика по отдельности, например в отдельных электронных каналах, поскольку каждый канал будет содержать различную информацию о тенях.
[0084] Например, рассмотрим внешний вид бака 1101 с пропаном на изображении 1102В, сгенерированном только из рассеянного излучения, зарегистрированного первым датчиком 1002, как показано на фиг.11В. На данном изображении по существу различим бак 1101 с пропаном.
[0085] Затем, рассмотрим внешний вид бака 1101 с пропаном на изображении 1102С, сгенерированном только из рассеянного излучения, зарегистрированного вторым датчиком 1005, размещенным в подвешенном положении 1005А, как показано фиг.11С. Теперь, бак 1101 с пропаном по существу более различим, чем на изображении, сгенерированном из данных, захваченных первым датчиком. Таким образом, обработка сигналов от первого датчика и второго датчика по отдельности предоставляет оператору системы два различных вида объекта, один из которых (в данном случае, изображение по фиг.11В) обеспечивает лучший вид объекта.
[0086] Далее, сравнивают внешний вид бака 1101 с пропаном на изображении, сгенерированном из рассеянного излучения, зарегистрированного первым датчиком 1002 и вторым датчиком 1005, размещенным в подвешенном положении 1005А, как показано фиг.11D. Теперь, изображение 1102D бака с пропаном имеет более высокое соотношение сигнал-шум при объединении обоих сигналов по сравнению с изображениями, полученными от любого одного датчика.
[0087] Несмотря на это, изображение 1102С только от второго датчика на фиг.11С показаны сильные тени на дне и стороне бака с пропаном, что помогает наблюдателю видеть его как отдельный трехмерный объект в багажнике машины.
[0088] На практике, возможно обеспечение наиболее простой реализацией возможности нажатия кнопки оператором или специалистом по анализу изображений для отображения объединенного изображения или отдельных изображений первого датчика (который может быть назван как ″боковой″ датчик в данном примере реализации) или второго датчика (подвешенного датчика). Для операторов, которые готовы провести большее количество времени над обработкой изображения, могут быть использованы ручка управления или скользящий маркер с программным обеспечением для получения составного изображения путем динамического изменения коэффициента смешения, например, от 100% по ширине и 0% по высоте, до равного содержания обоих значений, до 100% по высоте и 0% по ширине. Получение изображения путем перемещения такого ползунка назад и вперед и, таким образом, динамического изменения тени в изображении, может способствовать регистрации различных объектов, спрятанных в рассматриваемом транспортном средстве.
[0089] Соответственно, примеры реализации по фиг.10 обеспечивают множество потенциальных преимуществ. Например, сигналы от первого и второго датчиков могут проходить под различными углами относительно друг друга, могут быть обработаны независимо друг от друга, по отдельности друг от друга или могут быть объединены. Кроме того, изображения могут быть созданы на основании данных от первого датчика и/или второго датчика. Такие изображения могут являться статическими или могут быть динамически изменяемыми на основании вклада в полученное изображение от каждого датчика. Кроме того, несмотря на использование второго датчика, который выполнен с возможностью перемещения относительно первого датчика, изменяется размер матрицы датчиков, а не просто изменяются ее геометрические размеры или форма.
[0090] На фиг.10 также схематически показан другой пример реализации, содержащий третий датчик 1010, который может быть назван как ″дополнительный″ датчик или ″юбочный″ датчик. Третий датчик 1010 вручную скреплен с транспортным средством 1000 и вручную удален из него и проходит или дополняет матрицу датчиков, таких как первый датчик 1002. Несмотря на то, что третий датчик 1010 расположен на дне транспортного средства 1010 и, таким образом, может быть также назван как ″юбочный″ датчик, матрица датчиков может быть также расширена путем ручного выполнения дополнительных датчиков вокруг периферии существующей матрицы (например, первого датчиков 1002). Например, схожие датчики могут быть скреплены с наружной частью транспортного средства 1000 на левой или правой стороне обычной матрицы. Такие дополнительные датчики могут быть удалены и размещены в транспортном средстве по мере необходимости, например, для перемещения на скоростях, которые выше обычных скоростей сканирования, или если транспортное средство 1000 не имеет левого управления.
[0091] Способ обследования объекта с использованием обратнорассеянного излучения схематически показан посредством блок-схемы на фиг.12. Этап 1201 включает использование системы по меньшей мере с двумя датчиками обратнорассеянного излучения, причем по меньшей мере один из указанных датчиков выполнен с возможностью перемещения и может быть ориентирован или переориентирован относительно другого датчика, например как в вышеописанных примерах реализации. Этап 1202 затем включает настройку датчиков для формирования матрицы датчиков, при необходимости, оператором системы.
[0092] Затем объект освещают посредством источника излучения, а рассеянное излучение регистрируют на этапе 1203. В итоге, данные, характеризующие зарегистрированное излучение обрабатывают на этапе 1204, например, для получения изображения обследуемого объекта. Данные могут быть обработаны в совокупности или по отдельности согласно приведенному выше описанию.
[0093] Несмотря на то, что различные вышеописанные примеры реализации описаны с позиции настройки матрицы, также могут быть описаны другие примеры реализации. Согласно приведенному выше описанию по фиг.1, одно потенциальное преимущество матрицы с изменяемыми геометрическими характеристиками состоит в том, что матрица может быть выполнена компактной, что обеспечивает возможность перемещения матрицы ближе к объекту, который необходимо исследовать, и маневрирования внутрь пространств, которые не обеспечили бы возможность приближения к большей матрице.
[0094] Например, на фиг.1 показана ситуация, в которой оператор системы датчиков обратного рассеяния хочет исследовать воздушное судно 103 в углу 110, сформированном крылом 108 и фюзеляжем 109. Матрица 110 датчиков выполнена слишком большой для обеспечения возможности маневрирования системы 101 в узком пространстве между крылом 108 и фюзеляжем 109. Однако, матрица датчиков 106 и 107 на системе 102 выполнена таким образом, что размер матрицы не является настолько большим, поэтому система 102 может быть легко перемещена между крылом 108 и фюзеляжем 109.
[0095] В примере реализации по фиг.1, системы 101, 102 расположены на подвижных основаниях или транспортерах. Например, системы 101 и 102 могут содержать колеса или гусеницы, которые, например, обеспечивают возможность перемещения систем 101, 102 по меньшей мере вдоль одной линии перемещения. В примере реализации по фиг.1 система 101 имеет линию перемещения, которая указана стрелкой 111, а система 102 имеет линию перемещения, которая указана стрелкой 112.
[0096] При наблюдении из точки на линии перемещения 111, матрица 110 системы 101 представляет конкретный пространственный угол. В отличие от этого, если матрица 110 системы 101 была переделана в конструкцию, показанную для системы 102, затем матрица 110 представляла бы из той же самой точки меньший пространственный угол. В данном примере реализации, такой меньший пространственный угол является следствием достижения уменьшенного размера, и в частности в данном случае, ширины матрицы 110.
[0097] Это обеспечивает подвижную систему, такую как система 102, для продвижения матрицы датчиков вдоль линии перемещения с обеспечением возможности маневрирования системы в узких пространствах. В частности, поскольку система 102 совершает перемещение по направлению к воздушному судну 103, то датчики не формируют широкую матрицу, которая может контактировать с частью воздушного судна или любым другим ближайшим объектом и, таким образом, предотвращать приближение системы 102 к воздушному судну.
[0098] Система, такая как системы 101 и 102, может содержать матрицы с изменяемыми геометрическими характеристиками, содержащими, без ограничения, матрицы, описанные в настоящей заявке. Такая система может быть описана как система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта, содержащая транспортер, выполненный с возможностью перемещения вдоль линии перемещения, источник остронаправленного луча проникающего излучения, соединенный с транспортером и имеющий ось излучения. Система содержит матрицу датчиков с изменяемыми геометрическими характеристиками, которая содержит первый и второй датчики. Первый датчик имеет первый вектор выравнивания и соединен с транспортером таким образом, что первый вектор выравнивания параллелен линии перемещения или обеспечена возможность его расположения параллельно этой линии перемещения. Второй датчик также имеет вектор выравнивания. Второй датчик соединен с возможностью перемещения с транспортером таким образом, что он выполнен с возможностью перемещения между первым положением и вторым положением, а при нахождении в первом положении его вектор выравнивания параллелен линии перемещения. Таким образом, при наблюдении из точки на линии перемещения, матрица представляет первый пространственный угол при нахождении второго датчика в первом положении и меньший пространственный угол при нахождении второго датчика во втором положении.
[0099] Другими словами, с позиции человека, стоящего на линии перемещения, сближающая система может представлять матрицу одного размера при нахождении второго датчика в первом положении и представлять матрицу меньшего размера при нахождении второго датчика в другом положении. Например, однако, без ограничения, такая система может содержать матрицы с изменяемыми геометрическими характеристиками, как схематически показано на фиг.3, фиг.4А, фиг.4В, фиг.5, фиг.6, фиг.7А, фиг.7В или фиг.8, причем это лишь некоторые из возможных фигур.
[00100] В действительности, как видно на этих фигурах, размер матрицы может быть значительно уменьшен. В примере реализации по фиг.3, например, матрица содержит датчики 303, 304, 305 и 306. Пространственный угол такой матрицы, как видно из точки вдоль линии перемещения, если все датчики обращены в том же самом направлении, содержит объединенную ширину этих датчиков. Однако, при возвращении датчиков 305 и 306 назад, как схематически показано ссылочными номерами 305′ и 306′, пространственный угол, представленный матрицей, фактически пространственный угол, представленный транспортером 301 с матрицей, уменьшен приблизительно на 40 или 50 процентов. Аналогичным образом, в примере реализации по фиг.5, матрица, сформированная датчиками 505-508 вместе с их непронумерованными копиями на другой стороне транспортера 504, по существу меньше, если эти датчики возвращены в их двустворчатую ориентацию, чем в случае, в котором они расположены в открытом положении. Фактически, таким образом, пространственный угол, представленный транспортером 504 и матрицей, в данном примере реализации может быть уменьшен приблизительно на 60 процентов. В некоторых примерах реализации пространственный угол, сформированный транспортером и матрицей датчиков, может быть уменьшен до пространственного угла, представленного только транспортером, как схематически показано, например, на фиг.7А. Несмотря на то, что различные примеры реализации описаны в терминах относительного расположения векторов выравнивания, объем примеров реализации не ограничен матрицами, в которых вектора выравнивания всех датчиков параллельны друг другу или линии перемещения при расположении в открытом положении.
[00101] Такие системы могут быть отличны от других мобильных систем, которые имеют датчики или матрицы датчиков, расположенные таким образом, что их вектора выравнивания не ориентированы вдоль направления, в котором совершают перемещения мобильные системы. Например, грузовик может иметь датчик (или матрицу датчиков), расположенный на стороне грузовика, однако грузовик не может продвигать датчик в направлении вектора выравнивания датчика, поскольку грузовик не может совершать перемещение в боковых направлениях.
[00102] Множество примеров реализации может быть дополнительно описано, включая, например, первый пример реализации системы обследования с обратным рассеянием с изменяемыми геометрическими характеристиками, который содержит транспортер и источник проникающего излучения с остронаправленным лучом, соединенный с транспортером. Первый датчик, характеризующийся вектором выравнивания, соединен с транспортером в первом положении относительно источника излучения. Второй датчик излучения, характеризующийся вторым вектором выравнивания, соединен с транспортером посредством подвижного элемента, который соединен с возможностью перемещения с транспортером. Таким образом, вектор выравнивания второго датчика выполнен с возможностью переориентации относительно вектора выравнивания первого датчика таким образом, что чувствительность системы к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй вектора выравнивания по существу параллельны друг другу. В некоторых примерах реализации подвижный элемент содержит рычаг с одним концом, прикрепленным с возможностью поворота к транспортеру, и другой конец, соединенный со вторым датчиком излучения таким образом, что рычаг выполнен с возможностью поворота между открытым положением, в котором второй вектор выравнивания параллелен первому вектору выравнивания, и втянутым положением, в котором второй вектор выравнивания не параллелен первому вектору выравнивания. В альтернативных примерах реализации второй датчик содержит первый блок датчиков, а второй блок датчиков второй блок датчиков, выполненный с возможностью прикладывания к лицевой стороне первого блока датчиков. В других примерах реализации второй датчик соединен с транспортером посредством подвижной рамы, так что второй датчик может быть перемещен путем перемещения рамы параллельно земле, перпендикулярно земле или по диагонали относительно земли.
[00103] Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками содержит источник остронаправленного луча проникающего излучения, соединенный с транспортером. Первый датчик излучения содержит первый вектор выравнивания и соединен с возможностью поворота с транспортером в положении, закрепленном относительно источника излучения, так что первый датчик выполнен с возможностью поворота между первым положением и вторым положением. Второй датчик соединен с транспортером и содержит второй вектор выравнивания, параллельный первому вектору выравнивания при нахождении первого датчика в первом положении. В альтернативном примере реализации транспортер также содержит подъемный блок, соединенный с источником излучения таким образом, что подъемный блок выполнен с возможностью выдвижения для подъема источника излучения над транспортером.
[00104] Способ обследования объекта включает сканирование объекта проникающим излучением, сгенерированным источником, размещенном на транспортере, и регистрацию проникающего излучения, рассеянного объектом на первый датчик, характеризующийся первым вектором выравнивания и соединенный с транспортером, и второй датчик, характеризующийся вторым вектором выравнивания и выполненный с возможностью перемещения между первым положением, в котором второй вектор выравнивания параллелен первому вектору выравнивания, и вторым положением, причем чувствительность второго датчика к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй вектора выравнивания по существу параллельны друг другу, и включает перемещение второго датчика между первым положением и вторым положением. В некоторых примерах реализации перемещение второго датчика включает перемещение второго датчика из первого положения во второе положение, а в других примерах реализации перемещение второго датчика включает перемещение второго датчика из второго положения в первое положение. Некоторые примеры реализации оцифровывают обратнорассеянное излучение, падающее на второй датчик в канале приема данных во время обследования, и выключают канал приема данных во время этапа перемещения второго датчика из первого положения. В некоторых примерах реализации отключение канала приема данных включает электрическое отсоединение канала приема данных.
[00105] Кроме того, приведенное выше описание может подкреплять множество потенциальных пунктов формулы, таких как приведенные далее пункты формулы.
[00106] P1. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками, содержащая:
[00107] транспортер; источник остронаправленного луча проникающего излучения, соединенный с возможностью поворота с транспортером; первый датчик, соединенный с возможностью поворота с транспортером, имеющий постоянное положение относительно источника излучения и первого вектора выравнивания и выполненный с возможностью поворота между первым положением и вторым положением; и второй датчик, соединенный с транспортером и имеющий второй вектор выравнивания, параллельный первому вектору выравнивания при нахождении первого датчика в первом положении.
[00108] Р2. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками потенциального пункта Р1 формулы, в которой транспортер дополнительно содержит подъемный блок, соединенный с источником излучения и выполненный с возможностью выдвижения для подъема источника излучения над транспортером.
[00109] Р3. Способ обследования объекта, включающий: сканирование объекта проникающим излучением, сгенерированным источником, размещенном на транспортере; регистрацию проникающего излучения, рассеянного объектом на первый датчик, соединенный с транспортером и характеризующийся первым вектором выравнивания; регистрацию проникающего излучения, рассеянного объектом на второй датчик, характеризующийся вторым вектором выравнивания и выполненный с возможностью перемещения между первым положением, в котором второй вектор выравнивания параллелен первому вектору выравнивания, и вторым положением, причем чувствительность второго датчика к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй вектора выравнивания по существу параллельны друг другу; и включает перемещение второго датчика между первым положением и вторым положением.
[00110] Р4. Способ обследования объекта по п.3, согласно которому перемещение второго датчика включает перемещение второго датчика из первого положения во второе положение.
[00111] Р5. Способ обследования объекта по п.3, согласно которому перемещение второго датчика включает перемещение второго датчика из второго положения в первое положение.
[00112] Р6. Способ обследования объекта по п.3, дополнительно включающий оцифровку обратнорассеянного излучения, падающего на второй датчик в канале приема данных во время обследования, и отключение канала приема данных во время перемещения второго датчика из первого положения.
[00113] Р7. Способ обследования объекта по п.6, согласно которому отключение канала приема данных включает электрическое отсоединение канала приема данных.
[00114] Вышеописанные примеры реализации настоящего изобретения приведены только в качестве примера; специалистам в уровне техники будут очевидны различные изменения и модификации. Все такие изменения и модификации находятся в пределах объема настоящего изобретения, который определен в любых прилагаемых пунктах формулы.
[00115] Различные примеры реализации настоящего изобретения могут быть реализованы по меньшей мере частично на любом обычном языке программирования вычислительных систем. Например, некоторые примеры реализации могут быть реализованы на процедурном языке программирования (например, ″С″) или на объектно-ориентированном языке программирования (например, ″C++″). Другие примеры реализации настоящего изобретения могут быть реализованы в качестве элементов предварительно запрограммированных аппаратных средств (например, специализированные интегральные схемы, программируемая пользователем логическая матрица (FPGA) и цифровые сигнальные процессоры) или другие связанные компоненты.
[00116] В альтернативном примере реализации раскрытые устройство и способы могут быть реализованы в качестве компьютерного программного продукта для использования с компьютерной системой. Такая реализация может содержать набор компьютерных инструкций, установленных на любом материальном носителе, таком как нестационарный машиночитаемый носитель (например, дискета, компакт-диск CD-ROM, постоянное запоминающее устройство (ROM) или жесткий диск). Набор компьютерных инструкций может включать все или часть функциональных возможностей, ранее описанных в настоящей заявке по отношению к системе.
[00117] Специалисты в уровне техники должны понимать, что такие компьютерные инструкции могут быть написаны на множестве языков программирования для использования с множеством компьютерных архитектур или операционных систем. Кроме того, такие инструкции могут быть сохранены в любом запоминающем устройстве, таком как полупроводник, магнитный, оптический или другие запоминающее устройства, и могут быть переданы с использованием любых технологий связи, таких как оптические, инфракрасные, микроволновые или другие технологии передачи.
[00118] Среди прочих способов, такой компьютерный программный продукт может быть распространен в виде удаляемого носителя информации с сопроводительной печатной или электронной документации (например, закрытое программное обеспечение), предварительно снабжен компьютерной системой (например, на постоянном запоминающем устройстве (ROM) системы или жестком диске) или распределен с сервера или электронной доски сообщений по сети (например, Интернет или Всемирная паутина). Несомненно, некоторые примеры реализации настоящего изобретения могут быть реализованы в виде сочетания программного обеспечения (например, компьютерный программный продукт) и аппаратных средств. Еще одни другие примеры реализации настоящего изобретения реализованы полностью в виде аппаратных средств или полностью в виде программного обеспечения.












Использование: для регистрации обратнорассеянного проникающего излучения. Сущность изобретения заключается в том, что система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками содержит матрицу датчиков излучения, включающую один или большее количество датчиков обратнорассеянного излучения. Положение второго датчика обратнорассеянного излучения является изменяемым относительно положения первого датчика обратнорассеянного излучения, так что размер матрицы датчиков может быть изменен путем перемещения второго датчика излучения в положение заданного выравнивания с первым датчиком излучения или из этого положения. Система может содержать подвижное основание и по меньшей мере один из датчиков выполнен с возможностью перемещения относительно основания. Способы обследования объекта включают формирование матрицы датчиков путем перемещения второго датчика излучения в положение заданного выравнивания с первым датчиком излучения, освещение объекта остронаправленным лучом проникающего излучения и регистрацию обратнорассеянного излучения с использованием матрицы датчиков. Технический результат: обеспечение возможности контроля объекта на существенном расстоянии от системы обследования. 4 н. и 15 з.п. ф-лы, 17 ил.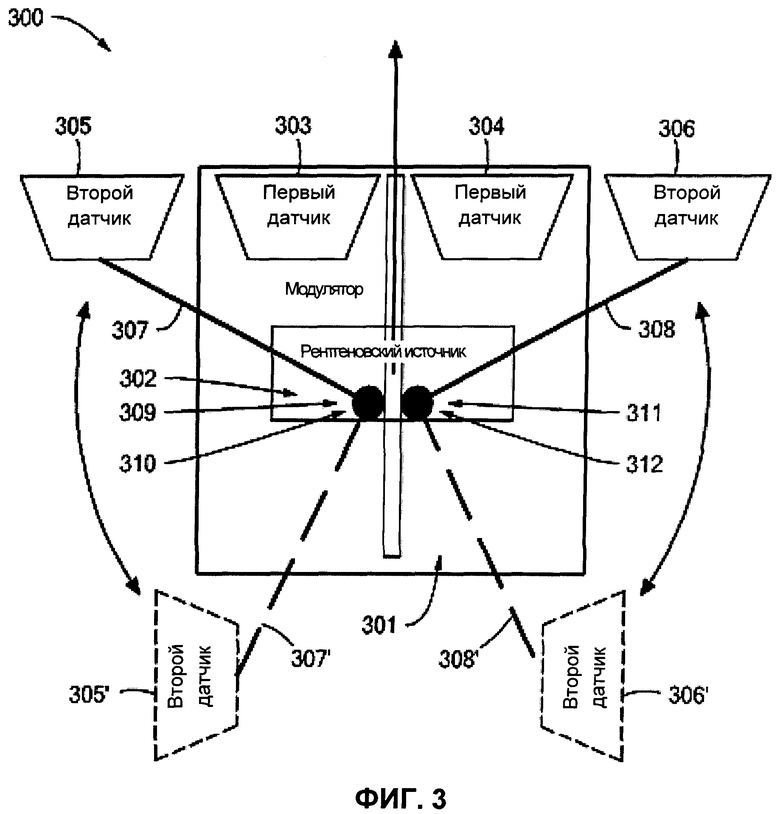
1. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта, содержащая:
транспортер, выполненный с возможностью перемещения вдоль линии перемещения;
источник остронаправленного луча проникающего излучения, соединенный с транспортером и имеющий ось излучения;
матрицу датчиков с изменяемыми геометрическими характеристиками, содержащую:
первый датчик, соединенный с транспортером и имеющий первый вектор выравнивания, параллельный линии перемещения;
второй датчик, соединенный с возможностью перемещения с транспортером, имеющий второй вектор выравнивания и выполненный с возможностью перемещения между первым положением и вторым положением, причем второй вектор выравнивания параллелен линии перемещения в первом положении;
так что матрица представляет первый пространственный угол при наблюдении от точки на линии перемещения при нахождении второго датчика в первом положении и меньший пространственный угол при нахождении второго датчика во втором положении.
2. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.1, в которой второй датчик соединен с возможностью перемещения с транспортером посредством подвижного элемента.
3. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.1, в которой подвижный элемент содержит рычаг, содержащий:
первый конец, соединенный с возможностью поворота с транспортером; и
второй конец, соединенный со вторым датчиком.
4. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.1, в которой второй датчик содержит первый блок и второй блок, выполненный с возможностью складывания к лицевой стороне первого блока.
5. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.2, в которой подвижный элемент содержит:
корпус датчика, задающий второй вектор выравнивания, параллельный первому вектору выравнивания, и выполненный с возможностью перемещения относительно транспортера таким образом, что второй вектор выравнивания остается параллельным первому вектору выравнивания в первом и втором положениях.
6. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.5, в которой корпус датчика выполнен с возможностью перемещения параллельно поверхности, на которой расположен транспортер.
7. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.5, в которой корпус датчика выполнен с возможностью перемещения перпендикулярно поверхности, на которой расположен транспортер.
8. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.5, в которой корпус датчика выполнен с возможностью перемещения по диагонали относительно поверхности, на которой расположен транспортер.
9. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта, содержащая:
транспортер;
источник остронаправленного луча проникающего излучения, соединенный с транспортером;
первый датчик, соединенный с транспортером и имеющий первое положение относительно источника излучения и первого вектора выравнивания;
подвижный элемент, соединенный с возможностью перемещения с транспортером и содержащий рычаг, имеющий первый конец, соединенный с возможностью поворота с транспортером, и второй конец; и
второй датчик, соединенный со вторым концом рычага и имеющий второй вектор выравнивания, так что рычаг выполнен с возможностью поворота между открытым положением, в котором второй вектор выравнивания параллелен первому вектору выравнивания, и втянутым положением, в котором второй вектор выравнивания не параллелен первому вектору выравнивания,
так что вектор выравнивания второго датчика выполнен с возможностью переориентации относительно вектора выравнивания первого датчика таким образом, что чувствительность системы к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй векторы выравнивания, по существу, параллельны друг другу.
10. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.9, в которой второй вектор выравнивания перпендикулярен первому вектору выравнивания при нахождении второго конца во втянутом положении.
11. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.9, в которой второй датчик содержит первый блок и второй блок, выполненный с возможностью складывания к лицевой стороне первого блока.
12. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками для обследования поверхности объекта, содержащая:
транспортер;
источник остронаправленного луча проникающего излучения, соединенный с транспортером;
первый датчик, соединенный с транспортером и имеющий первое положение относительно источника излучения и первого вектора выравнивания;
подвижный элемент, соединенный с возможностью перемещения с транспортером; и
второй датчик, соединенный с подвижным элементом и имеющий второй вектор выравнивания,
так что вектор выравнивания второго датчика выполнен с возможностью переориентации относительно вектора выравнивания первого датчика таким образом, что чувствительность системы к излучению, рассеянному от объекта, по существу максимизирована, если первый и второй векторы выравнивания, по существу, параллельны;
причем подвижный элемент содержит:
корпус датчика, задающий второй вектор выравнивания, параллельный первому вектору выравнивания, и выполненный с возможностью перемещения относительно транспортера, так что второй вектор выравнивания остается параллельным первому вектору выравнивания.
13. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.12, в которой датчик выполнен с возможностью перемещения параллельно поверхности, на которой расположен транспортер.
14. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.12, в которой корпус датчика выполнен с возможностью перемещения перпендикулярно поверхности, на которой расположен транспортер.
15. Система обследования с обратным рассеянием с изменяемыми геометрическими характеристиками по п.12, в которой корпус датчика выполнен с возможностью перемещения по диагонали относительно поверхности, на которой расположен транспортер.
16. Способ обследования объекта с использованием обратнорассеянного излучения, включающий:
использование транспортера, содержащего источник остронаправленного луча проникающего излучения;
использование первого датчика обратнорассеянного излучения, имеющего постоянное положение относительно транспортера и имеющего первый вектор выравнивания;
использование второго датчика обратнорассеянного излучения, соединенного с возможностью перемещения с транспортером и имеющего второй вектор выравнивания;
ориентирование второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания;
освещение объекта остронаправленным лучом излучения от источника;
регистрацию излучения, рассеянного источником, с использованием первого и второго датчиков;
генерирование первого изображения объекта с использованием данных, характеризующих излучение, рассеянное источником и зарегистрированное первым датчиком; и
генерирование второго изображения объекта с использованием данных, характеризующих излучение, рассеянное источником и зарегистрированное вторым датчиком.
17. Способ по п.16, дополнительно включающий получение составного изображения путем объединения данных из первого изображения с данными из второго изображения.
18. Способ по п.17, согласно которому получение составного изображения путем объединения данных из первого изображения с данными из второго изображения включает получение динамически изменяемого изображения путем регулирования пропорции первого изображения и пропорции второго изображения, объединенных для получения составного изображения.
19. Способ по п.16, согласно которому ориентирование второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания, включает ориентирование второго датчика таким образом, что второй вектор выравнивания пересекает первый вектор выравнивания угла в правом углу.
| US 6094472A, 25.07.2000 | |||
| US 6785360B1, 31.08.2004 | |||
| US 5181234A, 19.01.1993 | |||
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ И ВЕЩЕСТВ В КОНТРОЛИРУЕМЫХ ОБЪЕКТАХ | 2006 |
|
RU2309432C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ В ПРЕДМЕТЕ КРИСТАЛЛИЧЕСКИХ И ПОЛИКРИСТАЛЛИЧЕСКИХ МАТЕРИАЛОВ | 2000 |
|
RU2265830C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕРАЗРЕШЕННЫХ ПРЕДМЕТОВ | 2000 |
|
RU2253861C2 |

