[0001] Данная патентная заявка притязает на приоритет по предварительной заявке на патент США №61/476,002, поданной 15 апреля 2011 года под названием "Способы выполнения обследования обратного рассеяния сложных целей в ограниченных пространствах" от изобретателей Jeffrey R. Schubert, John P. Handy, Richard L. Schueller, Terry Lee McElroy, David C. Walazek и William J. Baukus, текст которой полностью включен в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к обследованию оборудования на основании регистрации обратнорассеянного проникающего излучения, а еще более конкретно к обследованию оборудования, применяемого в обследовании воздушного судна с использованием рентгеновских лучей.
УРОВЕНЬ ТЕХНИКИ
[0003] В уровне техники известно обследование объекта путем его облучения проникающим излучением, таким как рентгеновские лучи, например. Некоторое количество излучения может проходить через объект, а некоторое может быть поглощено или рассеяно объектом. Относительно падающего излучения, рассеянного во всех направлениях, излучение, рассеянное в общем направлении, обратном направлению своего поступления, может быть названо излучением обратного рассеяния. Такое рассеянное излучение может проходить в датчик (который может быть назван в настоящей заявке как "датчик рассеяния"), и некоторая часть этого рассеянного излучения будет зарегистрирована датчиком рассеяния.
[0004] Рассеянное излучение позволяет обнаружить особенности, включающие скрытую контрабанду или пластиковые взрывчатые вещества, которые характеризуются низким атомным номером, причем проникающее излучение более вероятно поглотится в объеме материала с высоким атомным номером, поскольку с увеличением атомного номера происходит очень быстрое увеличение фотоэлектрического поглощения (как между четвертой и пятой энергиями). Металлический корпус воздушного судна сильно поглощать рентгеновские лучи, причем запрещенные материалы будут более явными в обратном рассеянии рентгеновского излучения.
[0005] В силу этого, для заданной эффективности регистрации на единицу площади, отношение сигнал-шум увеличивается с увеличением пространственного угла, стянутого датчиком рассеяния, причем системы обратного рассеяния обычно бывают громоздкими и не очень хорошо подходят для обследования в ограниченной области. Это имело эффект ограничения применимости способов обследования с обратным рассеянием.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0006] В первом примере реализации настоящего изобретения раскрыта система обследования с обратным рассеянием и быстрым позиционированием, содержащая основание; стрелу, соединенную с основанием и содержащую первый участок, второй участок и третий участок, а также первое подвижное соединение, соединяющее первый участок со вторым участком, и второе подвижное соединение, соединяющее второй участок с третьим участком; сканирующую головку, соединенную с третьим участком и содержащую источник проникающего излучения для генерирования остронаправленного луча проникающего излучения, характеризующегося осью луча, и первый датчик, выполненный с возможностью регистрации рассеянного проникающего излучения; причем сканирующая головка выполнена с возможностью перемещения по меньшей мере на 3-7 степеней свободы относительно основания, а указанная система выполнена с возможностью захвата излучения обратного рассеяния во множестве ориентаций путем перемещения сканирующей головки, а первый участок сохраняет неподвижное положение по отношению к основанию, в которой по меньшей мере один датчик приближения, прикрепленный к сканирующей головке, выполнен с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси.
[0007] В некоторых примерах реализации по меньшей мере один из первого и второго участков выполнен с возможностью удлинения. В некоторых примерах реализации третий участок имеет ось вдоль его длины, а сканирующая головка выполнена с возможностью поворота вокруг оси. В некоторых примерах реализации сканирующая головка имеет такой размер, что она выполнена с возможностью размещения в обследуемом объекте.
[0008] В другом примере реализации способ захвата изображения обратного рассеяния, полученного путем облучения поверхности, расположенной внутри объекта, включает позиционирование системы обследования обратным рассеянием вплотную к объекту, содержащей основание, удлиняемую стрелу, скрепленную с основанием и содержащую по меньшей мере два участка, соединенные посредством подвижного соединения, сканирующую головку, расположенную на дальнем конце стрелы, и по меньшей мере один датчик приближения, прикрепленный к сканирующей головке и выполненный с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси; управление стрелой для ее удлинения от основания через канал в объекте по направлению к объему внутри объекта; облучение поверхности внутри объекта с использованием остронаправленного луча проникающего излучения; прием излучения обратного рассеяния в сканирующей головке; и обработку излучения обратного рассеяния для формирования изображения части внутреннего объема объекта. В некоторых примерах реализации способ также включает управление сканирующей головкой для ее последовательного ориентирования во множестве ориентаций в объеме внутри объекта.
[0009] В другом примере реализации подвижная система обследования с обратным рассеянием для исследования объекта содержит подвижное основание; источник остронаправленного луча проникающего излучения, имеющий ось передачи; сканирующую головку, соединенную с основанием и содержащую по меньшей мере один датчик, характеризующийся вектором выравнивания, причем ось излучения ориентирована по существу в том же самом направлении что и вектор выравнивания, так что датчик ориентирован для приема обратного рассеяния проникающего излучения; и по меньшей мере один датчик приближения, прикрепленный к сканирующей головке и выполненный с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси. В еще одних примерах реализации подвижная система обследования с обратным рассеянием дополнительно содержит второй датчик приближения, выполненный с возможностью регистрации второго заданного интервала между сканирующей головкой и объектом вдоль второй оси, причем вторая ось не параллельна первой оси.
[0010] В еще одних примерах реализации подвижная система обследования с обратным рассеянием содержит третий датчик приближения, выполненный с возможностью регистрации третьего заданного интервала между сканирующей головкой и объектом вдоль третьей оси, причем третья ось не параллельна первой оси или второй оси, а датчики образуют измерительный пузырь вокруг части сканирующей головки, а в еще одних примерах реализации три оси выполнены взаимно перпендикулярными.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Приведенные выше особенности примеров реализации будут лучше понятны со ссылкой на приведенное далее подробное описание, представленное со ссылкой на прилагаемые чертежи.
[0012] На фиг. 1А-1С схематически показаны примеры реализации системы обследования с обратным рассеянием и быстрым позиционированием.
[0013] На фиг. 2 схематически показана составная стрела.
[0014] На фиг. 3А-3С схематически показаны примеры реализации систем обследования с обратным рассеянием и особенностями для предотвращения столкновений.
[0015] На фиг. 4 схематически показана сканирующая головка с множеством контактных датчиков.
[0016] На фиг. 5А и 5В схематически показана сканирующая головка с амортизаторами.
[0017] На фиг. 6 схематически показан контактный датчик.
[0018] На фиг. 7 схематически показана система обследования с обратным рассеянием в фюзеляже воздушного судна.
[0020] На фиг. 8 схематически показана поворотная сканирующая платформа.
[0021] На фиг. 9 схематически показана система обследования с обратным рассеянием, содержащая множество закрепленных датчиков.
[0022] На фиг. 10 схематически показана систему обследования с обратным рассеянием, содержащая множество источников с поворотными датчиками.
[0023] На фиг. 11 схематически показана система обследования с обратным рассеянием, содержащая множество источников с закрепленными датчиками.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0024] В соответствии с иллюстративными примерами реализации система обследования с обратным рассеянием выполнена с возможностью доступа к ограниченным пространствам и другим местам, которые могут являться труднодоступными или недоступными с использованием обычных систем обследования с обратным рассеянием. Для этого примеры реализации системы обследования с обратным рассеянием содержат шарнирную стрелу для достижения сжатых и удаленных пространств и датчики приближения для оповещения оператора о слишком близком расположении части системы к обследуемому объекту. Некоторые примеры реализации содержат один или большее количество поворотных низкоэнергетических источников проникающего излучения и датчики рассеяния, выполненные с возможностью регистрации обратного рассеяния от поворотных источников.
[0025] Кроме того, некоторые системы обследования могут создавать цифровые данные из зарегистрированного излучения обратного рассеяния. Такие данные могут быть использованы, например, для создания изображения обследуемого объекта.
[0026] Приведенные далее определения могут быть полезны в понимании различных примеров реализации, описанных в настоящей заявке, и в любых пунктах формулы, приложенной к настоящей заявке.
[0027] Под "источником излучения" следует понимать источник остронаправленного луча проникающего излучения. Пример такого проникающего излучения может представлять собой рентгеновские лучи, а настоящее изобретение может быть описано в настоящей заявке в терминах рентгеновских лучей, однако без ограничения назначения. Остронаправленный луч задает ось распространения излучения, которая может быть названа осью луча.
[0028] Под термином "вектор выравнивания", при использовании по отношению к датчику рассеяния, следует понимать направление, заданное линейным геометрическим местом точек, проходящим по направлению наружу от датчика, по отношению к которому пространственный угол, стянутый объемом датчика при виде из точки обзора на геометрическом месте точек, превышает пространственный угол при виде из любой другой точки в плоскости, которая расположена поперечно вектору в точке обзора. Таким образом, проще говоря, вектор выравнивания указывает в направлении мест для которых датчик наиболее эффективен в регистрации рассеяния.
I. Система обследования обратным рассеянием с быстрым позиционированием
[0029] Подвижная система обследования с обратным рассеянием может сталкиваться с объектами с неправильными формами. Такие объекты могут представлять поверхности, контуры и пространства, которые сложно или невозможно обследовать с использованием обычной системы обратного рассеяния. Таким образом, некоторые примеры реализации выполнены с возможностью быстрого позиционирования для обеспечения возможности маневрирования системы и/или сканирующей головки вокруг преград и в труднодоступные пространства. Эти системы продлевают пригодность систем обратного рассеяния для ранее недоступных применений.
[0030] На фиг. 1А схематически показана система 101 обследования с обратным рассеянием и быстрым позиционированием, в соответствии с примером реализации настоящего изобретения, вплотную к крылу 102 воздушного судна. Поскольку крыло 102 расположено близко к земле, попытка размещения обычной системы обратного рассеяния под центральной частью крыла может быть нереализуемой для заданного размера систем обратного рассеяния. Аналогичным образом, попытка размещения системы обследования над крылом 102 может быть нереализуемой для заданного веса систем обратного рассеяния и сложной при безопасном подъеме и ориентировании таких систем.
[0031] Крыло 102 также содержит внутренние пространства 103, которые, по аналогичным причинам, было бы сложно или невозможно обследовать с использованием обычной системы с обратным рассеянием. Поскольку пространства в крыльях воздушного судна являются превосходными местами для хранения или перевозки контрабандных товаров, то существует необходимость в системе обследования обратным рассеянием с возможностью обследования таких мест.
[0032] В отличие от обычных систем, система 101 хорошо подходит для таких задач. Система содержит три основных компонента: основание, стрелу и сканирующую головку, которые вместе обеспечивают возможность достижения и обследования системой 101 множества неровных поверхностей и пространств.
[0033] Подвижное основание 104 обеспечивает опору для системы 101. Мобильность основания обеспечивает возможность простого перемещения системы к обследуемому объекту или повторного перемещения в различные положения вокруг обследуемого объекта. В данном примере реализации основание 104 расположено на колесах 105, однако основание может также иметь, например, гусеницы или ролики.
[0034] Основание 104 выполнено относительно небольшим, например меньшим по сравнению с грузовиком или погрузчиком с вилочным захватом, для улучшения его маневренности. Однако основание 104 также имеет размер и вес, достаточные для обеспечения устойчивости платформы стрелы и сканирующей головки, поскольку они проходят по направлению от основания. В некоторых примерах реализации основание может иметь след на земле, который больше на 30 дюймов, чем на стороне.
[0035] Работу по облучению объекта и захвату излучения обратного рассеяния выполняет сканирующая головка 106. Для обследования объекта сканирующая головка выполнена с возможностью перемещения относительно основания 104 и, таким образом, относительно обследуемого объекта. По существу, система может обследовать различные части крыла 102, например, без необходимости позиционирования всей системы обследования под крылом или над ним.
[0036] Сканирующая головка 106 облучает объект с использованием источника излучения и захватывает излучение обратного рассеяния с использованием по меньшей мере одного датчика (например, см. фиг. 5А и 5В). Источник излучения создает остронаправленный луч проникающего излучения вдоль оси передачи для облучения обследуемого объекта. В некоторых примерах реализации источник излучения может совершать перемещение относительно основания с тем, чтобы указать или сканировать ось передачи во множестве направлений. Таким образом, нет необходимости в перемещении всей сканирующей головки 106 для обследования другой части объекта. На фиг. 1А, веерная форма 107, проходящая от сканирующей головки 106, не является физической особенностью сканирующей головки; а скорее указывает диапазон сканирования, допускаемого источником излучения. По меньшей мере один датчик расположен в заданном положении относительно источника излучения, однако не на оси передачи, и ориентирован с тем, чтобы захватить излучение, рассеянное от обследуемого объекта.
[0037] Кроме того, сканирующая головка 106 может совершать поворот вокруг оси по нормали к стреле, которая его поддерживает, как указано двунаправленной стрелкой в сканирующей головке. По существу, система, показанная на фиг. 1А, имеет множество степеней подвижности.
[0038] Для обследования объекта оператор маневрирует основание 105 к объекту, который должен быть обследован и удлиняет сканирующую головку 106 от основания посредством стрелы 107. Для этого, стрела 107 содержит множество участков, которые облегчают перемещение сканирующей головки 106 множеством способов, включающих подъем сканирующей головки и ее проведение сбоку по направлению от основания 104. В примере реализации по фиг. 1А, стрела содержит подъемное приспособление 108 для подъема сканирующей головки 106 над основанием 104 (то есть, вертикально по отношению к основанию 104). Это обеспечивает возможность сканирующей головке 106 обследовать крыло 102 сверху, как схематически показано на фиг. 1В, без необходимости позиционирования всей сканирующей системы над крылом 102.
[0039] Один или большее количество удлиняемых компонентов 109 стрелы 107 дополнительно увеличивают гибкость системы, как показано на фиг. 1В. Например, участок стрелы может представлять собой телескопический элемент или ножницеобразный элемент. Удлиняемая стрела 107 поддерживает сканирующую головку 106 таким образом, что она может совершать перемещение в сторону по отношению к основанию 104. В некоторых примерах реализации участок стрелы 107, расположенный наиболее близко к основанию, может сохранять неподвижное положение по мере того, как другие части стрелы проходят, вращаются, совершают поворот или другим образом совершают перемещение или изменяют положения или ориентации для повторного размещения сканирующей головки. По существу, стрела 107 может проходить по направлению от основания 104 на расстояние, составляющее по меньшей мере ширину основания, а в некоторых примерах реализации длина стрелы может превышать в 2, 3 и более раз ширину основания.
[0040 В некоторых примерах реализации, которые, например, схематически показаны на фиг. 1С, сканирующая головка 106 выполнена с возможностью поворота обратно по направлению к удлиняемой стреле таким образом, что ось передачи источника излучения указывает по направлению к крылу 102. Это облегчает обследование обратной стороны крыла или других труднодоступных частей крыла, без необходимости позиционирования всей системы обследования обратным рассеянием под крылом.
[0041] Стрела может иметь любое количество участков и может быть выполнена с возможностью удлинения и/или шарнирного соединения для обеспечения любого необходимого количества степеней свободы. Другой пример реализации составной стрелы 200 схематически показан на фиг. 2. Стрела 200 имеет три участка (201, 202 и 203) стрелы, соединенных посредством соединений (205 и 206), которые обеспечивают несколько степеней свободы по отношению к другим ее участкам и основанию, как указано двунаправленными стрелками рядом с соединениями 205, 206 и сканирующей головкой 204. Кроме того, один или большее количество участков стрелы могут быть выполнены с возможностью удлинения.
[0042] Участок 203 стрелы характеризуется осью 209 вдоль его длины, а сканирующая головка 204 соединена с возможностью поворота с участком 203 стрелы посредством подвижного соединения 207 с тем, чтобы обеспечить возможность поворота вокруг оси. По существу, сканирующая головка 204 и стрела 200 могут иметь семь или большее количество степеней свободы по отношению к основанию 208, поддерживающему стрелу. Таким образом, система обеспечивает возможность перемещения сканирующей головки 204 в объекте или вокруг него и даже через каналы в объекте для маневрирования сканирующей головки в место, которое должно быть обследовано. Например, система со стрелой 200, расположенной снаружи небольшого воздушного судна, может маневрировать сканирующую головку через пассажирскую дверь или другое отверстие в фюзеляже и в кабину. Сканирующая головка затем может быть выполнена с возможностью поворота вокруг оси 209 для формирования 360-градусного изображения внутреннего пространства кабины. Другие примеры реализации могут иметь большее или меньшее количество участков стрелы и подвижные соединения и иметь большее или меньшее количество степеней свободы. Например, некоторые примеры реализации могут содержать стрелу с одним концом, соединенным с возможностью перемещения с подвижным основанием, и сканирующую головку, соединенную с другим концом стрелы с тремя степенями свободы. Такой пример реализации имел бы пять степеней свободы, если перемещение основания рассматривать для обеспечения одной из тех степеней свободы.
[0043] Некоторые примеры реализации также содержат дополнительное подвижное соединение 110, расположенное между подъемным приспособлением 108 и первым участком 111 стрелы 107, как схематически показано на фиг. 1С. Подвижное соединение 110 может наклонять удлиняемые участки стрелы 107 снизу таким образом, что может быть обеспечено приближение сканирующей головки к крылу 102 с ее нижней стороны, или кверху таким образом, что может быть обеспечено приближение сканирующей головки к крылу 102 сверху.
[0044] Как показано, различные примеры реализации обеспечивают возможность перемещения сканирующей головки на значительные расстояния от основания, включая расстояния, которые больше размеров самого основания. Проведение сканирующей головки будет перемещать центр тяжести системы, однако не обязательна должна быть обеспечена возможность перемещения центра тяжести за пределы наружных краев основания для уменьшения возможности наклона. По существу, основание должно иметь ширину, достаточную для того, чтобы центр тяжести системы не выходил за пределы краев основания. Точные размеры основания, необходимые для предотвращения наклона, будут зависеть от веса и максимального удлинения стрелы. Например, в некоторых примерах реализации основание составляет по меньшей мере 30 дюймов на угле, а в некоторых примерах реализации даже больше.
II. Система обследования с обратным рассеянием и предотвращением столкновений
[0045] Некоторые объекты, которые должны быть обследованы, такие как воздушное судно, имеют тонкую внешнюю обшивку или, в противном случае, восприимчивы к повреждению. Незначительное перемещение или ошибка в вычислениях системного оператора может вызвать контакт основания или сканирующей головки с объектом с обеспечением потенциального повреждения объекта и сканирующей головки или основания. По этой причине, некоторые примеры реализации содержат измерительные и управляющие особенности для оповещения оператора и/или для замедления или остановки перемещения системы, если часть системы расположена в пределах заданного расстояния от объекта.
[0046] Один такой пример реализации схематически показан на фиг. 3А, в котором система 300 обследования с обратным рассеянием расположена вплотную к небольшому воздушному судну 301. Множество датчиков на сканирующей головке 302, такие как датчики 401-406 на фиг. 4, формируют измерительный периметр 304 или пузырь вокруг сканирующей головки 302. Датчики регистрируют любую часть воздушного судна 301, которая нарушает периметр 304, что обеспечивает оповещение оператора или даже остановку перемещения сканирующей головки 302 или основания 303. По существу, система 300 содержит подсистему предотвращения столкновений. Некоторые примеры реализации аналогичным образом содержат датчики, расположенные на основании 303 и вокруг него, для предотвращения контакта этого основания с обследуемым объектом или другими объектами.
[0047] Сканирующая головка 400 по фиг. 4 содержит контактные датчики 401-406, формирующие измерительный периметр на трех сторонах. Каждый из датчиков 401-406 имеет направление, в котором он может входить в контакт с объектом, таким как обшивка воздушного судна, и тем самым множество датчиков обеспечивают множество возможностей для регистрации. Это направление может быть названо осью чувствительности.
[0048] Некоторые датчики, такие как датчики 403 и 404, направлены в том же самом направлении, в различные места на сканирующей головке 400. Такие датчики могут обеспечить дополнительную чувствительность или могут обеспечить возможность измерения системой ее угла приближения к объекту. Например, при приближении сканирующей головки 400 к объекту под углом, датчик 403 может регистрировать контакт до датчика 404. По существу, оператор системы может изменять траекторию перемещающейся сканирующей головки 400 для поддержания интервала между сканирующей головкой 400 и объектом, который зарегистрирован датчиком 403, однако может продолжать перемещение на более близкое расстояние до, например, столкновения датчика 404 с объектом. Таким образом, сканирующая головка 400 может быть перемещена ближе к обследуемой поверхности, действительности по существу параллельно ей.
[0049] Другие датчики указывают в различных направлениях для удлинения и формирования измерительного периметра. Например, датчики 402 и 405 расположены под углом к датчику 403 и 404. Некоторые датчики, такие как датчики 401 и 406, могут даже указывать в направлениях 180 градусов друг от друга, в данном случае для защиты сторон 407 и 406 сканирующей головки 400. По существу, множество датчиков может быть расположено под углом по отношению друг к другу таким образом, что ни один из этих датчиков не имеет оси чувствительности, которая расположена параллельно осям чувствительности других датчиков. В действительности, некоторые примеры реализации могут содержать три датчика с взаимно перпендикулярными осями.
[0050] На фиг. 3В схематически показан другой пример реализации системы 320, имеющей измерительные и управляющие особенности для оповещения оператора и/или замедления или остановки перемещения системы, если часть системы расположена в пределах заданного расстояния объекта. Данный пример реализации содержит различные дуги 321, 322 и 323 акустических датчиков, которые функционируют как датчики приближения. В некоторых примерах реализации акустические датчики 325 на дугах 321, 322 и 323 могут иметь тип, обычно используемый, например, в качестве запасных датчиков в автомобильной промышленности, а в других примерах реализации датчики могут регистрировать другие формы энергии, такой как инфракрасная или электромагнитная энергия, причем такой датчик работает аналогично акустическим датчикам, описанным в настоящей заявке, но с использованием различных форм энергии. В некоторых примерах реализации каждый акустический датчик 325 может представлять собой передатчик, который может передавать и принимать эхо от акустического сигнала. Процессор, такой как процессор или таймер, может быть применен для определения расстояния между датчиком 325 и объектом путем определения времени между передачей акустического сигнала и приемом эха (при наличии такового) этого сигнала. Для этого, каждый датчик 325 может модулировать его передаваемый сигнал с использованием идентифицируемой модуляции, такой как бинарный код, так что передающий датчик может отличать эхо его передаваемого сигнала от эха сигналов, переданных от других датчиков 325.
[0051] Каждый акустический датчик может быть описан как задающий область чувствительности в пространстве рядом с датчиком. На фиг. 3В, такие области чувствительности схематически показаны в виде пузырей 325В. Объект в области чувствительности (например, в пузыре) будет создавать эхо от соответствующего датчика для указания близости датчика (и дуги датчика) к объекту. Другими словами, объекты в области чувствительности могут быть идентифицированы как расположенные рядом с датчиком. Такая индикация может быть обработана и представлена пользователю как сигнал оповещения о близости объекта или использована другим образом, описанным согласно фиг. 3А.
[0052] На фиг. 3А самая нижняя дуга 321 расположена рядом с дном системы 330 обследования с обратным рассеянием. Однако сканирующая головка 331 может быть поднята, как схематически показано на фиг. 3С. В некоторых примерах реализации одна или большее количество дуг 321, 322, 333 датчика сохраняют положение радом с дном (например, рядом с уровнем земли), а одна или большее количество дуг датчика совершают перемещение со сканирующей головкой 331. Таким образом, одна дуга (например, дуга 321) сохраняет свое положение рядом с землей для регистрации объектов рядом с уровнем земли, а по меньшей мере одна другая дуга (например, дуга 323) совершает перемещение со сканирующей головкой 331 для регистрации объектов рядом со сканирующей головкой 331.
[0053] В некоторых примерах реализации датчики 325 могут представлять собой тип датчиков, используемых в автомобильной промышленности. Такие датчики обычно выполнены в группах из (4) датчиков, в которых каждый датчик в группе выполнен с возможностью передачи уникального сигнала с тем, чтобы предотвратить влияние на работу других датчиков в группе. Другими словами, в группе нет двух датчиков, которые используют такую же модуляцию и, таким образом, в группе нет двух датчиков, которые выполнены одинаковыми. Например, датчики из группы могут быть названы как S1, S2, S3 и S4.
[0054] Если дуга датчика или группа дуг датчиков содержит более одной такой группы, то некоторые примеры реализации могут применять датчики для минимизации или предотвращения взаимного влияния между аналогичными датчиками. Например, если каждая дуга 321, 322, 324 имеет группу из четырех датчиков, датчики могут быть размещены на дугах следующим образом:
[0055] Дуга 321: S1 S2 S3 S4
[0056] Дуга 322: S3 S4 S1 S2
[0057] Дуга 323: S1 S2 S3 S4
[0058] Таким образом, ни одного датчика на одной дуге не расположено непосредственно вплотную к аналогичному датчику на другой дуге. В некоторых примерах реализации заданная дуга датчика может содержать более одной группы датчиков. В таких примерах реализации группы должны быть размещены таким образом, чтобы ни одного датчика на дуге не было расположено вплотную к аналогичному датчику на этой дуге и не одного датчика на одной дуге не было расположено непосредственно вплотную к аналогичному датчику на другой дуге. Кроме того или в качестве альтернативы, в некоторых примерах реализации датчики отделены не только их расстоянием от других датчиков на той же самой дуге и не только их расстоянием от датчиков на других дугах, однако также вследствие кривизны дуг, так что пузыри вокруг различных датчиков ориентированы в различных направлениях.
[0059] Некоторые примеры реализации могут содержать два или большее количество датчиков для регистрации различных расстояний между сканирующей головкой и обследуемым объектом. Например, первый датчик может регистрировать интервал, составляющий 20 сантиметров в заданном направлении, а второй датчик может регистрировать интервал, составляющий только 15 сантиметров в том же самом направлении. Если первый датчик приведен в действие, то система может оповестить оператора, например, посредством света или звукового сигнала оповещения и/или вызвать замедление перемещения основания или сканирующей головки посредством бортовой управляющей системы. Если второй датчик приведен в действие, то управляющая система может быстро остановить перемещение сканирующей головки и/или основания.
[0060] Лицевая часть 409 сканирующей головки 400 может, в частности, являться сложной для защиты, поскольку датчики не могут быть расположены перед источником 410 или датчиками 411 и 412. Другими словами, датчик не должен быть расположен таким образом, что он блокирует передачу излучения посредством источника 410 или блокирует обратнорассеянное излучение от достижения датчиков 411 и 412.
[0061] Для удовлетворения этому требованию некоторые примеры реализации содержат амортизаторы 501, 502 и 503, соединенные с датчиками, как схематически показано на фиг. 5А и 5В. Амортизаторы эффективно удлиняют пузырь или периметр к лицевой стороне 507 сканирующей головки. В примере реализации, показанном на фиг. 5В, амортизаторы 504A-504D формируют раму 504 вплотную к лицевой части 503. Объект, такой как часть воздушного судна, которая контактирует с амортизатором, будет приводить в действие по меньшей мере один из датчиков 505 или 506. В то же самое время амортизаторы не блокируют источник 507 или датчики 508, 509. Кроме того, амортизаторы могут быть изготовлены из материалов, которые выполнены прозрачными по отношению к излучению, что дополнительно уменьшает потенциальное взаимное влияние.
[0062] Аналогичные амортизаторы 501, 503 могут быть применены на сторонах 510 и 511 сканирующей головки 500. Далее, отсутствует риск блокирования необходимого излучения, однако такие амортизаторы являются дорогими, поскольку они могут легко удлинять измерительный периметр без необходимости добавления дополнительных датчиков. Например, в отличие от сканирующей головки 400 по фиг. 4, измерительный периметр сканирующей головки 500 проходит мимо датчика 512 и дополнительно по направлению к обратной стороне 513 сканирующей головки 500. Аналогичным образом, амортизаторы будут взаимодействовать с приближающимся объектом рядом с углом 514 (то есть участок между датчиками 506 и 515) без необходимости в дополнительном датчике, а дополнительное расстояние затем может быть зарегистрировано только датчиками 515 и 506.
[0063] В некоторых примерах реализации амортизаторы могут обеспечивать возможность совместной работы датчиков для выдачи информация о том, где сканирующая головка расположена наиболее близко к объекту. Например, если датчик 505 приведен в действие, а датчик 506 нет, то затем система могут логически делать вывод, что объект расположен наиболее близко к датчику 505. Однако если датчик 505 и датчик 506 приведены в действие, то система может логически делать вывод, что объект расположен рядом с центром амортизатора 502.
[0064] Несмотря на то, что датчики в предыдущих примерах реализации были описаны как контактные датчики, в альтернативных примерах реализации могут быть использованы другие типы датчиков. Например, различные применения могут извлекать пользу из использования емкостных датчиков, инфракрасных датчиков или ультразвуковых или других акустических датчиков, электромагнитных датчиков или других типов механических датчиков, для приведения в качестве примера только некоторых.
[0065] Однако, контактные датчики являются многоцелевыми, что не должно быть проигнорировано. Например, некоторые контактные датчики хорошо подходят для использования с амортизаторами, как описано выше. Кроме того, некоторые контактные датчики могут быть выполнены с возможностью регистрации более одного расстояния или даже сообщения расстояния при множестве малых приращений.
[0066] Один пример реализации простого механического контактного датчика 600 схематически показан на фиг. 6. В данном примере реализации механический датчик 600 содержит наконечник 601, толкатель 602 и корпус 603. При контакте наконечника 601 с объектом толкатель 602 отводится в полость 604 в корпусе 603. Это предотвращает прокалывание, расцарапывание или иные повреждения наконечником 601 поверхности или объекта. Фактически, сила, приложенная к объекту, может быть отрегулирована пружиной 605. Пружина 605 выполняет функцию по сохранению толкателя 602 в полностью выступающем состоянии при отсутствии контакта с объектом, а в противном случае, обеспечивает возможность отведения толкателя 602 в полость 604.
[0067] По мере отведения толкателя 602 в полость 604 его перемещение включает микровыключатель 606, что беспечивает передачу сигнала от выключателя на управляющую систему. Управляющая система, которая может содержать микропроцессор, запрограммированный с использованием конкретного программного обеспечения, или другую обрабатывающую плату, затем узнает расстояние между сканирующей головкой и объектом, с которым эта сканирующая головка вошла в контакт, и может прореагировать соответствующим образом. Например, управляющая система могут среагировать путем применения тормозов к колесам основания для остановки или замедления основания, чтобы предотвращать какое-либо приближение сканирующей головки к объекту. Аналогичным образом, управляющая система может остановить или замедлить перемещение сканирующей головки. Безусловно, управляющая система может также оповестить оператора посредством звукового или визуального сигнала.
[0068] Несмотря на то, что контактный датчик 600 содержит микровыключатель 606, в данном примере реализации множество других датчиков могут быть использованы для измерения перемещения толкателя, содержащее, например, оптические или магнитные датчики.
[0069] Кроме того, множество выключателей (или других подходящих датчиков) может быть размещено на различных глубинах в полости 604, причем каждый из них регистрирует последовательно увеличивающееся проникновение толкателя 602. Для этого и/или для обеспечения возможности уменьшения дополнительного диапазона толкателя при контакте с объектом, глубина полости 604 может обеспечивать проникновение толкателя в полость на дополнительное расстояние после приведения в действие микровыключателя посредством толкателя. В действительности, в некоторых примерах реализации дополнительное расстояние может превышать расстояние, первоначально необходимое для включения толкателем микровыключателя в первом месте.
III. Рентгеновская система обследования с обратным рассеянием для ограниченных пространств
[0070] Обследование некоторых объектов или пространств может извлекать пользу из размещения системы обследования с обратным рассеянием в объекте или пространстве. Например, внутреннее пространство пассажирского воздушного судна может ограничивать размеры системы, использованной с воздушным судном, а объекты, такие как сиденья, стенки и подвесные бункеры, в воздушном судне могут ограничивать или препятствовать удлинению или управлению стрелой. Аналогичным образом, полость, содержащая самодельные взрывные устройства, может представлять сжатые пространства и неправильные контуры, а в других случаях большое помещение в здании со стенками из гипсокартона может содержать сжатые пространства, подобные углам, или могут содержать мебель или другие конструкции, которые могут ограничивать или препятствовать удлинению или управлению стрелами.
[0071] Обследование некоторых объектов или пространств могут извлекать пользу из применения системы обследования с обратным рассеянием с относительно небольшими компонентами, выполненными с возможностью достижения сжатых пространств. Например, некоторые объекты могут представлять внешние контуры, которые могут ограничивать или препятствовать увеличению или управлению стрелами, такие как сжатое пространство, расположенное между крылом и фюзеляжем воздушного судна, или щель между поверхностью крыла или фюзеляжа и гондолой двигателя, для приведения в качестве примера только некоторых.
[0072] Для этого некоторые примеры реализации выполнены компактными и не зависят от удлиняемых стрел или требуют, чтобы их датчики были расположены максимально близко к обследуемой поверхности. Иллюстративные примеры реализации, описанные в настоящей заявке включают обследование коммерческого лайнера с внутренней части фюзеляже такого коммерческого лайнера, однако понятно, что примеры реализации могут быть использованы для обследования внутренней части или внешней части других мест, таких как здания, наземные транспортные средства и полости.
[0073] Пример реализации такой системы 700 обследования с обратным рассеянием схематически показан на фиг. 7, на которой проиллюстрировано подвижное основание 701 в салоне 702 коммерческого лайнера 703 или другого воздушного судна. Элементы системы 700 имеют размер и выполнены таким образом, что система 700 будет установлена и работать в фюзеляже воздушного судна 703.
[0074] В частности, размеры основания 701 ограничены возможностью установки основания в салоне 702. Кроме того, основание 701 выполнено с возможностью перемещения таким образом, что может сканировать длину фюзеляжа воздушного судна путем перемещения по направлению вниз салона 702. Для этого, основание может иметь, например, колеса 704 или колесики.
[0075] Система 700 облучает части внутреннего пространства воздушного судна 703 путем поворота источника излучения 705 в вертикальной плоскости (то есть, вертикальной по отношению к дну) и регистрирует обратнорассеянное излучение с использованием одного или большего количества датчиков (например, как показано на фиг. 8). Вертикальная плоскость может или не может быть расположена перпендикулярно горизонтальной оси салона 702.
[0076] В некоторых примерах реализации 800, которые, например, схематически показаны на фиг. 8, сканирующая платформа 801 соединена с возможностью поворота с основанием (например, основанием, которое показано на фиг. 7) и содержит источник 802, выполненный с возможностью создания остронаправленного луча проникающего излучения от точки 803 излучения. Далее, точка излучения представляет собой участок ограниченной области, в которую луч проникающего излучения выходит от их источника излучения 802. Остронаправленный луч задает ось передачи, которая исходит от точки излучения и которая расположена по нормали к оси 804, вокруг которой совершает поворот сканирующая платформа 801. В процессе работы точка 803 излучения и луч проникающего излучения могут охватывать дугу или круг вокруг оси поворота 804 и, таким образом, могут облучать все окружающее воздушное судно 805 или его часть.
[0077] Обследование внутренних особенностей воздушного судна может извлекать пользу из ограничений по выходной энергии источника излучения. Известно, что некоторое излучение, такое как рентгеновские лучи, может быть опасным. В целом, выгодно и более безопасно использование излучения при наиболее низком энергетическом уровне или рядом с ним, достаточном для заданного обследования. Ограничение по выходной энергии источника излучения может быть обусловлено поверхностью или материалом, который должен быть обследован. Например, в уровне техники известно, что для заданного материала существует энергия, при которой рассеяние Комптона начинает преобладать над фотоэлектрическим поглощением. Эта точка в целом представляет собой функцию от атомного номера (Z) материала. По существу, выбор выходной энергии может представлять собой функцию не только от материала, который должен быть обследован (а еще точнее, от атомного веса того материала), но также и от типа рассеяния, причем система выполнена с возможностью регистрации (например, падающих лучей в случае рассеяния Комптона или электронов, излученных вследствие фотоэлектрического эффекта). В некоторых примерах реализации, показанных в настоящей заявке, материал будет содержать алюминий (с атомным номером Z=13), так что система, выполненная с возможностью регистрации электронов, испускаемых вследствие фотоэлектрического эффекта, может быть ограничена энергиями в или приблизительно в 70 кэВ. Однако другие системы имеют большие или меньшие энергии и, таким образом, описания систем, работающих на 70 кэВ или менее, приведены только для иллюстративных целей и не ограничивают объем настоящего изобретения. Аналогичным образом, некоторые примеры реализации, раскрытые в настоящей заявке, содержат ссылку на энергетический спектр проникающего излучения. Однако в некоторых примерах реализации источник энергии может представлять собой моноэнергетическим источник, такой как изотопный источник. По существу, описания энергетического спектра проникающего излучения не ограничивают все примеры реализации источниками, которые не выполнены моноэнергетическими.
[0078] Использование излучения с относительно высокой энергией является неизбежным, если система необходима, например, для обследования внутренних частей стенок фюзеляжа, поскольку излучение обязательно должно иметь энергию, достаточную для проникновения в такие внутренние части и создания регистрируемого обратного рассеяния. С другой стороны, обследование внутреннего пространства воздушного судна, включая его содержимое (например, пластиковые панели, пеноматериал, матерчатые сиденья и т.д.), может быть благополучно выполнено с использованием излучения с относительно низкой энергией. В частности, излучение должно только иметь энергию, достаточную для проникновения в такие материалы. Например, в некоторых примерах реализации обследование внутреннего пространства воздушного судна, энергетический уровень излучения недостаточен для проникновения в стенки фюзеляжа (например, для предотвращения получения обратного рассеяния от объектов в стенках или за их пределами или для предотвращения передачи излучения за пределы внутреннего пространства воздушного судна).
[0079] Таким образом, некоторые примеры реализации работают при низкой энергии, такой как энергии в 70 кэВ или менее. Излучение может быть таким, что фотоэлектрическое ослабление проникающего излучения металлическим корпусом воздушного судна превышает рассеяние проникающего излучения металлическим корпусом по всему энергетическому спектру проникающего излучения. Такой низкой энергии (например, 70 кэВ или менее) никогда не достаточно для обследования внутренних пространств. В качестве дополнительного преимущества, такой источник питания уменьшает вес более мощной системы.
[0080] Для регистрации обратнорассеянного излучения система 800 содержит пару датчиков 806, 807 рассеяния, которые совершают поворот с источником 802. Каждый датчик 806, 807 рассеяния имеет вектор выравнивания, который может или не может быть расположен параллельно оси луча, однако который проходит в том же самом направлении, что и ось луча, так что датчики 806, 807 всегда расположены для обеспечения обнаружения по меньшей мере части любого обратнорассеянного излучения, поскольку они совершают поворот с источником 802.
[0081] Датчики 806, 807 в примере реализации по фиг. 8 не расположены непосредственно вплотную к точке 803 излучения. Вследствие этого, датчики 806, 807 не расположены настолько близко к заданному месту обратного рассеяния, насколько они могли бы быть расположены в точке 803 излучения или рядом с ней. Некоторые авторы (например, см. патент США №7,623,626, Safai и другие) полагают и отстаивают точку зрения, что датчики должны быть расположены рядом с точкой обратного рассеяния по мере возможности, причем согласно теории такая близость к месту обратного рассеяния будет, среди всего прочего, максимизировать поток излучения в датчик, улучшать разрешение и предотвращать искажение. Однако такой подход также означает, что объединенный размер точки излучения и датчиков больше, чем размер только точки излучения, с тем следствием, что возможность перемещения точки излучения ближе к поверхности сканируемого объекта может быть ограничена.
[0082] Система 800 в данном примере реализации обеспечивает возможность обследования объекта без необходимости позиционирования датчиков рядом с точкой излучения. Изобретатели выявили, что поток в датчиках представляет собой функцию от пространственного угла датчиков при виде из места обратного рассеяния, а не только от непосредственной близости датчиков к этой точке. Другими словами, то же самое количество обратнорассеянного излучения может быть зарегистрировано посредством больших датчиков, размещенных дальше от места обратного рассеяния, чем посредством меньших датчиков, расположенных близко к тому месту.
[0083] По существу, с использованием датчиков, установленных на расстоянии от точки излучения, область системы рядом с точкой излучения может быть меньше и, таким образом, более маневренной и сноровистой. Кроме того, размещение датчиков ближе к оси поворота, а не рядом с точкой излучения, создает меньший момент вокруг оси, поскольку датчики совершают поворот вокруг этой оси с обеспечением возможности лучшего управления таким поворотом и лучшего позиционирования датчиков и источника излучения. В различных примерах реализации датчики могут быть расположены на оси поворота или в любой точке, расположенной между осью и точкой излучения. В некоторых примерах реализации датчики могут быть расположены таким образом, что ось поворота расположена между датчиками и точкой излучения.
[0084] Альтернативные примеры реализации содержат датчики, которые не совершают поворот с точкой излучения. Пример реализации по фиг. 9 содержит множество датчиков 901-908, прикрепленных к основанию (не показано) и формирующих периметр вокруг оси поворота 909. По существу, всегда существует по меньшей мере один датчик, ориентированный для регистрации излучения обратного рассеяния, независимо от положения точки 910 излучения. Управляющее устройство, такое как запрограммированный микропроцессор или другая схема, может контролировать местоположение источника 909 по отношению к датчикам 901-908 для определения, какой датчик или датчики наилучшим образом расположены для приема излучения обратного рассеяния от того источника. Управляющее устройство может затем выборочно обработать данные этих датчиков. Согласно альтернативному варианту управляющее устройство может выборочно привести в действие эти датчики, причем приведение в действие датчика означает обработку его данных и не означает, что датчик выключен или выведен из строя другим образом.
[0085] Еще одни примеры реализации содержат более одного источника излучения или по меньшей мере более одной точки излучения для обеспечения соответствующего количества остронаправленных лучей проникающего излучения от соответствующего количества точек излучения. Такие примеры реализации могут быть выполнены с возможностью доставки большего количества энергии к обследуемому объекту для обеспечения более быстрого и более подробного сканирования.
[0086] Один такой пример реализации схематически показан на фиг. 10, в котором две группы датчиков (1001 и 1002; 1003 и 1004) соответствуют двум источникам излучения 1005 и 1006, каждый из которых имеет энергию не выше 70 кэВ. Другие примеры реализации могут иметь энергию, составляющую 70 кэВ или с более высоким значением в зависимости от потребностей предполагаемого применения системы.
[0087] Каждый источник излучения 1005 и 1006 создает луч проникающего излучения соответственно вдоль осей 1007 и 1008 лучей, причем оси 1007 и 1008 лучей расположены диаметрально противоположно друг другу. Обратнорассеянное излучение из каждой точки излучения затем скоррелировано с датчиками, связанными с каждой точкой излучения. По существу, 360-градусное сканирование в вертикальной плоскости могло бы быть обеспечено с использованием только полуповорота вокруг оси.
[0088] Еще один пример реализации системы с множеством источников схематически показан на фиг. 11, в котором множество датчиков 1101-1108 формируют вокруг периметр, однако не совершают поворот с источниками 1109 и 1110 вокруг оси 1111. В процессе работы система 1100 соединять подгруппу датчиков 1101-1108 с каждым источником 1109 и 1110 с тем, чтобы установить связь зарегистрированного излучения обратного рассеяния с его источником.
[0089] Например, управляющее устройство, соединенное с системой по фиг. 11, может контролировать местоположение двух источников 1109 и 1110 относительно множества датчиков 1101-1108 и обрабатывать выходные сигналы датчиков путем динамического соединения подгрупп датчиков 1101-1108 с источниками 1109-1110.
[0090] Например, если источники 1109 и 1110 расположены в положениях, показанных на фиг. 11, то излучение обратного рассеяния, зарегистрированное датчиками 1101-1103, скорее всего, возникло в источнике 1109 (и обратнорассеянное из другого места в воздушном судне). Таким образом, управляющее устройство может связывать данные от этих датчиков с источником 1109 и соответственно обрабатывать эти данные. В отличие от этого, излучение, зарегистрированное датчиками 1105-1107, менее вероятно поступило от источника 1109 и, таким образом, не связано с этим источником. В действительности, излучение, зарегистрированное датчиками 1105-1107, вероятнее всего возникло в источнике 1110 и, таким образом, связано с этим источником и обработано соответствующим образом. Другими словами, данные от различных датчиков выборочно обрабатываются (или датчики выборочно приведены в действие) для осуществления корреляции этих данных с источником, из которого наиболее вероятно возникло излучение.
[0091] Излучение, зарегистрированное датчиками 1104 и 1108, при этом, с такой же вероятностью возникло от любого источника или даже от какого-то другого объекта. По существу, данные от этих датчиков не могут быть достоверно связаны с одним из источников, как данные от других датчиков, и могут быть отброшены.
[0092] В отличие от этого, к тому времени как источники 1109 и 1110 совершат поворот на 180 градусов, они будут иметь измененные положения. По существу, датчики 1101-1103 затем будут связаны с источником 1110, а датчики 1105-1107 будут соединены с датчиком 1109. В различных промежуточных положениях датчики 1104 и 1108 будут соединены с одним датчиком или другим, а оставшиеся датчики будут расположены время от времени между двумя источниками таким образом, что их выходной сигнал не использован.
[0093] Различные примеры реализации могут реализовывать другие особенности. В некоторых примерах реализации с множеством источников каждый источник может иметь различные энергии. Такая система может дважды сканировать каждую точку на объекте, по одному разу с каждой энергией, для получения изображения из сочетания отдельно зарегистрированных изображений обратного рассеяния.
[0094] Некоторые примеры реализации могут также содержать один или большее количество датчиков расстояния для установления расстояния между системой или частью системы (например, точкой излучения или датчиком) от поверхности обследуемого объекта. Например, лазерный дальномер может быть установлен для измерения расстояния вдоль оси луча для луча проникающего излучения. С использованием этой информации система может формировать карту расстояний, связанную с каждым пикселем в изображении обратного рассеяния. Эти данные в свою очередь могут быть использованы для удаления искажений из изображения обратного рассеяния (возможно обеспечение пространственной реконструкции). Кроме того, для высокоотражающего объекта за поверхностью затемнения данные о расстоянии и уровне сигнала могут быть коррелированы для оценки массы (для принятого атомного номера Z) объекта. В альтернативном варианте, если затемнение может быть принято относительно тонким и иметь низкий атомный номер Z (например, как в случае с внутренними стеновыми панелями воздушного судна) система обратного рассеяния с двумя уровнями энергии может быть использована для оценки атомного номера Z любого интересующего объекта. Данная информация может быть затем использована вместе с данными о расстоянии и уровне сигнала для оценки массы объекта.
[0095] Может быть описано множество других примеров реализации. Например, в первом примере реализации раскрыта система обследования с обратным рассеянием и быстрым позиционированием. Система имеет стрелу, соединенную с основанием. Стрела имеет первый участок, второй участок и третий участок, а также первое подвижное соединение, соединяющее первый участок со вторым участком, и второе подвижное соединение, соединяющее второй участок с третьим участком. Сканирующая головка соединена с третьим участком и содержит источник проникающего излучения для генерирования остронаправленного луча проникающего излучения, характеризующегося осью луча, и первый датчик, выполненный с возможностью регистрации рассеянного проникающего излучения. Сканирующая головка выполнена с возможностью перемещения по меньшей мере на 3-7 степеней свободы относительно основания, а система выполнена с возможностью захвата излучения обратного рассеяния во множестве ориентаций путем перемещения сканирующей головки, а первый участок сохраняет неподвижное положение по отношению к основанию.
[0096] В некоторых примерах реализации по меньшей мере один из первого и второго участоков стрелы выполнен с возможностью удлинения и может представлять собой телескопический элемент. В других примерах реализации первый и второй участки выполнены с возможностью удлинения и могут представлять собой телескопический элемент.
[0097] В некоторых примерах реализации третий участок стрелы имеет ось вдоль его длины, а сканирующая головка выполнена с возможностью поворота вокруг оси.
[0098] В некоторых примерах реализации масса основания достаточна для предотвращения наклона основания, если стрела полностью удлинена параллельно земле, а в некоторых примерах реализации основание составляет по меньшей мере 30 дюймов (76 см) в ширину и 30 дюймов в толщину.
[0099] В некоторых примерах реализации сканирующая головка выполнена с возможностью размещения в обследуемом объекте.
[00100] Способ захвата изображения обратного рассеяния, полученного путем облучения поверхности, которая расположена внутри объекта, включает этапы позиционирования системы обследования с обратным рассеянием вплотную к объекту, содержащей основание и удлиняемую стрелу, скрепленную с основанием и имеющую по меньшей мере два участка, соединенные посредством подвижного соединения, и сканирующую головку, расположенную на дальнем конце стрелы. Способ также включает управление стрелой для удлинения от основания чрез канал в объекте по направлению к объему внутри объекта и облучение поверхности внутри объекта с использованием остронаправленного луча проникающего излучения. Способ затем включает этап приема излучения обратного рассеяния в сканирующей головке и последующую обработку этого излучения обратного рассеяния для формирования изображения части внутреннего объема объекта. Другой пример реализации включает управление сканирующей головкой для ее последовательного ориентирования во множестве ориентаций в объеме внутри объекта.
[00101] Подвижная система обследования с обратным рассеянием для исследования объекта содержит источник остронаправленного луча проникающего излучения, имеющий ось передачи (которая может быть названа осью излучения) и соединенный с основанием. Система также содержит сканирующую головку, соединенную с основанием, имеющую по меньшей мере один датчик в месте не на оси передачи и ориентированную для приема проникающего излучения, рассеянного объектом, а также по меньшей мере один датчик приближения, соединенный с основанием и выполненный с возможностью регистрации первого заданного интервала между этим местом и объектом.
[00102] Датчик приближения в некоторых примерах реализации содержит толкатель, а в некоторых примерах реализации толкатель имеет диапазон перемещения, содержащий первую часть, расположенную между полностью выдвинутым положением и пороговой точкой, и вторую часть, расположенную после пороговой точки. В некоторых примерах реализации вторая часть превышает первую часть. Толкатели в некоторых примерах реализации дополнительно содержат амортизатор, соединенный с толкателем.
[00103] Датчик приближения в некоторых примерах реализации представляет собой инфракрасный датчик, а в других примерах реализации датчик приближения представляет собой ультразвуковой датчик, а в еще одних примерах реализации датчик приближения представляет собой емкостной датчик.
[00104] Некоторые примеры реализации содержат индикатор для оповещения оператора при регистрации первого заданного интервала, причем индикатор содержит по меньшей мере один из визуального индикатора и звукового индикатора.
[00105] Некоторые примеры реализации содержат второй датчик приближения, выполненный с возможностью регистрации второго заданного интервала между местом и объектом, который меньше первого заданного интервала. Альтернативные примеры реализации содержат индикатор для оповещения оператора при регистрации одного из первого и второго заданных интервалов, причем индикатор содержит по меньшей мере один из визуального индикатора и звукового индикатора, а некоторые примеры реализации содержат тормоза для замедления перемещения основания при регистрации первого заданного интервала и/или остановки перемещения основания при регистрации второго заданного интервала. Некоторые примеры реализации содержат индикатор для оповещения оператора при регистрации первого заданного интервала и тормоза для замедления перемещения основания при регистрации второго заданного интервала.
[00106] Подвижная система обследования с обратным рассеянием для исследования объекта содержит: подвижное основание; источник остронаправленного луча проникающего излучения, имеющий ось передачи; сканирующую головку, соединенную с основанием и содержащую по меньшей мере один датчик, характеризующийся вектором выравнивания, осью передачи (которая может быть названа осью излучения), ориентированной по существу в том же самом направлении что и вектор выравнивания, так что датчик ориентирован для приема обратного рассеяния проникающего излучения; и по меньшей мере один датчик приближения, прикрепленный к сканирующей головке и выполненный с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси.
[00107] Альтернативные примеры реализации содержат второй датчик приближения, выполненный с возможностью регистрации второго заданного интервала между сканирующей головкой и объектом вдоль второй оси, которая не параллельна первой оси. Альтернативные примеры реализации содержат третий датчик приближения, выполненный с возможностью регистрации третьего заданного интервала между сканирующей головкой и объектом вдоль третьей оси, которая не параллельна первой оси или второй оси, причем датчики образуют измерительный пузырь вокруг части сканирующей головки, а в некоторых примерах реализации три оси выполнены взаимно перпендикулярными.
[00108] Некоторые примеры реализации содержат второй датчик приближения, выполненный с возможностью регистрации второго заданного интервала между сканирующей головкой и объектом вдоль второй оси, которая параллельна первой оси. В альтернативных примерах реализации каждый из первого и второго датчиков приближения имеет направление чувствительности, причем направление чувствительности второго датчика приближения составляет 180 градусов от направления чувствительности первого датчика приближения.
[00109] Подвижная система обследования с обратным рассеянием для обследования содержимого пространства, ограниченного корпусом (который может быть ограничен металлическим корпусом) содержит: сканирующую платформу, соединенную с возможностью поворота с подвижным основанием и имеющую ось поворота; источник излучения, характеризующийся энергетическим спектром, соединенный со сканирующей платформой и выполненный с возможностью передачи остронаправленного луча проникающего излучения из точки излучения, причем луч имеет ось луча, проходящую по направлению наружу от оси поворота, а фотоэлектрическое ослабление проникающего излучения посредством металлического корпуса превышает рассеяние проникающего излучения посредством металлического корпуса по всему энергетическому спектру проникающего излучения; и первый датчик, характеризующийся объемом датчика и соединенный со сканирующей платформой в месте таким образом, что весь объем датчика расположен ближе к оси поворота сканирующей платформы по сравнению с точкой излучения, причем первый датчик совершает поворот с источником излучения. В альтернативных примерах реализации все проникающее излучение источника излучения имеет энергии менее 70 кэВ. В некоторых примерах реализации ось луча расположена перпендикулярно оси поворота.
[00110] В некоторых примерах реализации может быть задана плоскость, которая расположена поперечно оси поворота и которая пересекает точку излучения, так что пересечение оси поворота с плоскостью расположено ближе к точке излучения по сравнению с любой точкой пересечения между плоскостью и датчиком. В альтернативных примерах реализации ось поворота расположена между и по существу на равном расстоянии от точки излучения и точки датчика, которая расположена ближе к точке излучения, чем любая точка в объеме датчика, а в еще одних примерах реализации датчик расположен вплотную к оси поворота.
[00111] Подвижная система обследования с обратным рассеянием для сканирования ограниченного пространства содержит: сканирующую платформу, соединенную с возможностью поворота с подвижным основанием и имеющую ось поворота; первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой, выполненный с возможностью передачи первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота, и работающий при или менее 70 кэВ; и множество датчиков, соединенных с основанием и формирующих периметр вокруг оси поворота.
[00112] В некоторых примерах реализации второй источник остронаправленного луча проникающего излучения соединен со сканирующей платформой и выполнен с возможностью передачи второго сканирующего луча вдоль первой оси, однако в направлении, противолежащем первому сканирующему лучу вследствие поворота сканирующей платформы, а система содержит управляющее устройство для выборочного приведения в действие одного датчика или подгруппы датчиков из множества датчиков для регистрации излучения обратного рассеяния от первого источника излучения и для выборочного приведения в действие другого датчика или другой подгруппы датчиков из множества датчиков для регистрации излучения обратного рассеяния от второго источника излучения.
[00113] Некоторые примеры реализации содержат датчик расстояния, установленный для регистрации расстояния между источником излучения и сканируемым объектом.
[00114] Подвижная система обследования с обратным рассеянием для сканирования ограниченного пространства содержит: сканирующую платформу, соединенную с возможностью поворота с подвижным основанием и имеющую ось поворота; первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой, выполненный с возможностью передачи первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота, и работающий на или менее 70 кэВ; второй источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой, выполненный с возможностью передачи второго сканирующего луча вдоль первой оси, однако в направлении, противолежащем первому сканирующему лучу вследствие поворота сканирующей платформы, и работающий на или менее 70 кэВ; множество датчиков, соединенных с основанием и формирующих периметр вокруг оси поворота; и управляющее устройство для выборочного приведения в действие одного датчика (или подгруппы датчиков) из множества датчиков для регистрации излучения обратного рассеяния от первого источника излучения и для выборочного приведения в действие другого датчика из множества датчиков (или другой подгруппы датчиков из множества датчиков) для регистрации излучения обратного рассеяния от второго источника излучения.
[00115] Система обследования с обратным рассеянием с множеством отверстий содержит: сканирующую платформу, соединенную с возможностью поворота с основанием и имеющую ось поворота; первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью передачи первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота; первый датчик, соединенный со сканирующей платформой и задающий вектор выравнивания по нормали к направлению первого сканирующего луча, причем первый датчик совершает поворот с источником излучения; второй источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью передачи второго сканирующего луча, имеющего вторую ось, проходящую по направлению наружу от оси в направлении, противолежащем первому сканирующему лучу; и второй датчик, соединенный со сканирующей платформой и задающий второй вектор выравнивания, расположенный по нормали к оси второго сканирующего луча, причем второй датчик совершает поворот во вторым источником излучения. В некоторых примерах реализации первый источник излучения работает при первой энергии, а второй источник излучения работает при более низкой энергии.
[00116] Множество других примеров реализации могут быть заданы на основании приведенного выше описания. Например, потенциальные пункты формулы содержат следующее:
[00117] Р1. Подвижная система обследования с обратным рассеянием для обследования содержимого пространства, ограниченного корпусом (который может представлять собой металлический корпус или другое естественное пространство, такое как пещера, или любой другой сделанный человеком металлический или неметаллический корпус), содержащая:
[00118] подвижное основание;
[00119] сканирующую платформу, соединенную с возможностью поворота с основанием и имеющую ось поворота;
[00120] источник излучения, характеризующийся энергетическим спектром, соединенный со сканирующей платформой и выполненный с возможностью излучения остронаправленного луча проникающего излучения из точки излучения, причем луч имеет ось луча, проходящую по направлению наружу от оси поворота, а фотоэлектрическое ослабление проникающего излучения посредством металлического корпуса превышает рассеяние проникающего излучения посредством металлического корпуса по всему энергетическому спектру проникающего излучения;
[00121] первый датчик, характеризующийся объемом датчика, соединенный со сканирующей платформой в месте таким образом, что весь объем датчика расположен ближе к оси поворота сканирующей платформы, чем точка излучения расположена к оси поворота сканирующей платформы, причем первый датчик совершает поворот с источником излучения
[см., например, фиг. 10, фиг. 11].
[00122] Р2. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р1, в которой все проникающее излучением источника излучения имеет энергию, составляющую менее 70 кэВ.
[00123] Р3. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р1, в которой ось луча расположена перпендикулярно оси поворота.
[00124] Р4. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р1, в которой в плоскости, которая расположена поперечно оси поворота и пересекает точку излучения, пересечение оси поворота с плоскостью расположено ближе к точке излучения, чем любая точка пересечения между плоскостью и датчиком расположена по отношению к точке излучения.
[00125] Р5. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р1, в которой ось поворота расположена между или по существу на равном расстоянии от точки излучения и точки датчика, которая расположена ближе точке излучения, чем любая другая точка в объеме датчика.
[00126] Р6. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р1, в которой датчик расположен вплотную к оси поворота.
[00127] Р7. Подвижная система обследования с обратным рассеянием для сканирования ограниченного пространства, содержащая:
[00128] подвижное основание;
[00129] сканирующую платформу, соединенную с возможностью поворота с основанием и имеющую ось поворота;
[00130] первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота, причем первый источник работает на или менее 70 кэВ;
[00131] множество датчиков, соединенных с основанием и формирующих периметр вокруг оси поворота [см., например, фиг. 9].
[00132] Р8. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р7, дополнительно содержащая:
[00133] второй источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения второго сканирующего луча вдоль первой оси, однако в направлении, противолежащем первому сканирующему лучу по мере поворота сканирующей платформы;
[00134] управляющее устройство для выборочного приведения в действие одного датчика или подгруппы датчиков из множества датчиков для регистрации излучения обратного рассеяния от первого источника излучения и для выборочного приведения в действие другого датчика из множества датчиков или другой подгруппы из множества датчиков для регистрации излучения обратного рассеяния от второго источника излучения [см., например, фиг. 11].
[00135] Р9. Подвижная система обследования с обратным рассеянием согласно потенциальному пункту Р7, дополнительно содержащая датчик расстояния, установленный для регистрации расстояния между источником излучения и сканируемым объектом.
[00136] Р10. Подвижная система обследования с обратным рассеянием для сканирования ограниченного пространства, содержащая:
[00137] подвижное основание;
[00138] сканирующую платформу, соединенную с возможностью поворота с основанием и имеющую ось поворота;
[00139] первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота, причем первый источник работает на или менее 70 кэВ;
[00140] второй источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения второго сканирующего луча вдоль первой оси, однако в направлении, противолежащем первому сканирующему лучу по мере поворота сканирующей платформы, причем второй источник работает на или менее 70 кэВ;
[00141] множество датчиков, соединенных с основанием и формирующих периметр вокруг оси поворота;
[00142] управляющее устройство для выборочного приведения в действие одного датчика или подгруппы датчиков из множества датчиков для регистрации излучения обратного рассеяния от первого источника излучения и для выборочного приведения в действие другого датчика из множества датчиков или другой подгруппы датчиков из множества датчиков, или для регистрации излучения обратного рассеяния от второго источника излучения [см., например, фиг. 11].
[00143] Р11. Система обследования с обратным рассеянием и множеством отверстий, содержащая:
[00144] основание;
[00145] сканирующую платформу, соединенную с возможностью поворота с основанием и имеющую ось поворота;
[00146] первый источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения первого сканирующего луча, имеющего первую ось, проходящую по направлению наружу от оси поворота;
[00147] первый датчик, соединенный со сканирующей платформой и задающий вектор выравнивания по нормали к направлению первого сканирующего луча, причем первый датчик совершает поворот с источником излучения;
[00148] второй источник остронаправленного луча проникающего излучения, соединенный со сканирующей платформой и выполненный с возможностью излучения второго сканирующего луча, имеющего вторую ось, проходящую наружу от оси в направлении, противолежащем первому сканирующему лучу;
[00149] второй датчик, соединенный со сканирующей платформой и задающий второй вектор выравнивания, расположенный по нормали к оси второго сканирующего луча, причем второй датчик совершает поворот со вторым источником излучения [см., например, фиг. 10].
[00150] Р12. Система обследования с обратным рассеянием и множеством отверстий по потенциальному пункту Р11, в которой причем первый источник излучения работает при первой энергии, а второй источник излучения работает при более низкой энергии.
[00151] Вышеописанные примеры реализации настоящего изобретения приведены только в качестве примера; специалистам в области техники будут очевидны многие изменения и модификации. Все такие изменения и модификации находятся в пределах объема настоящего изобретения, который задан в прилагаемой формуле изобретения.
[00152] Различные примеры реализации настоящего изобретения могут быть реализованы по меньшей мере частично на любом обычном компьютерном языке программирования. Например, некоторые примеры реализации могут быть реализованы на процедурном языке программирования (например, "С") или на объектно-ориентированном языке программирования (например, "С++"). Другие примеры реализации настоящего изобретения могут быть реализованы в виде запрограммированных элементов аппаратных средств (например, специализированных интегральных схем, программируемых пользователем логических матриц (FPGA) и цифровых сигнальных процессоров) или других родственных компонентов.
[00153] В альтернативном примере реализации раскрытые устройство и способы могут быть реализованы в качестве компьютерного программного продукта для использования с компьютерной системой. Такая реализация может содержать набор компьютерных инструкций, установленных на материальном носителе, таком как непереходный машиночитаемый носитель (например, дискета, компьютерный компакт-диск (CD-ROM), постоянное запоминающее устройство (ROM) или жесткий диск). Наборы компьютерных инструкций могут воплощать все или часть функциональных возможностей, ранее описанных в настоящей заявке по отношению к системе.
[00154] Специалисты в области техники должны понимать, что такие компьютерные инструкции могут быть написаны на множестве языков программирования для использования с множеством компьютерных архитектур или операционных систем. Кроме того, такие инструкции могут быть сохранены в любом запоминающем устройстве, таком как полупроводниковые, магнитные, оптические или другие запоминающие устройства, и могут быть переданы с использованием любой технологии связи, такой как оптическая, инфракрасная, микроволновая или другие технологии передачи.
[00155] Среди прочих способов, такой компьютерный программный продукт может быть распространен в виде удаляемого носителя информации с сопроводительной печатной или электронной документации (например, закрытое программное обеспечение), предварительно снабжен компьютерной системой (например, на постоянном запоминающем устройстве (ROM) системы или жестком диске) или распределен с сервера или электронной доски сообщений по сети (например, Интернет или Всемирная паутина). Несомненно, некоторые примеры реализации настоящего изобретения могут быть реализованы в виде сочетания программного обеспечения (например, компьютерный программный продукт) и аппаратных средств. Еще одни другие примеры реализации настоящего изобретения реализованы полностью в виде аппаратных средств или полностью в виде программного обеспечения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБРАТНОГО РАССЕЯНИЯ С ИЗМЕНЯЕМЫМ РАЗМЕРОМ МАТРИЦЫ ДАТЧИКОВ | 2012 |
|
RU2589394C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДОСМОТРА ОБЪЕКТА | 2006 |
|
RU2418291C2 |
| РЕНТГЕНОВСКИЙ ОСМОТР С ПОМОЩЬЮ ОДНОВРЕМЕННОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ НА ОСНОВЕ ПРОПУСКАНИЯ И ОБРАТНОГО РАССЕИВАНИЯ СВЕТА | 2007 |
|
RU2499251C2 |
| РЕНТГЕНОВСКОЕ ОБСЛЕДОВАНИЕ С ИСПОЛЬЗОВАНИЕМ ВОЛОКОННЫХ СЦИНТИЛЛЯЦИОННЫХ ДАТЧИКОВ СО СДВИГОМ ДЛИН ВОЛН | 2013 |
|
RU2606698C2 |
| СИСТЕМЫ И СПОСОБЫ УЛУЧШЕНИЯ НАПРАВЛЕННОГО ДОСМОТРА ЛЮДЕЙ | 2008 |
|
RU2475851C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛА ИССЛЕДУЕМОГО ОБЪЕКТА И СПОСОБ ДОСМОТРА ОБЪЕКТА | 2008 |
|
RU2476863C2 |
| СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ КВАЗИУПРУГОГО РАССЕЯНИЯ СВЕТА И/ИЛИ СКАНИРОВАНИЯ ФЛУОРЕСЦЕНТНОГО ЛИГАНДА В ГЛАЗУ СУБЪЕКТА | 2009 |
|
RU2503399C2 |
| СПОСОБ ГЕНЕРАЦИИ ИЗОБРАЖЕНИЯ ОБЪЕКТА, СИСТЕМА КОНТРОЛЯ ДЛЯ ПРОВЕРКИ ОБЪЕКТОВ И СПОСОБ ПРОВЕРКИ ОБЪЕКТА | 2007 |
|
RU2411506C2 |
| СИСТЕМА КОНТРОЛЯ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2448342C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
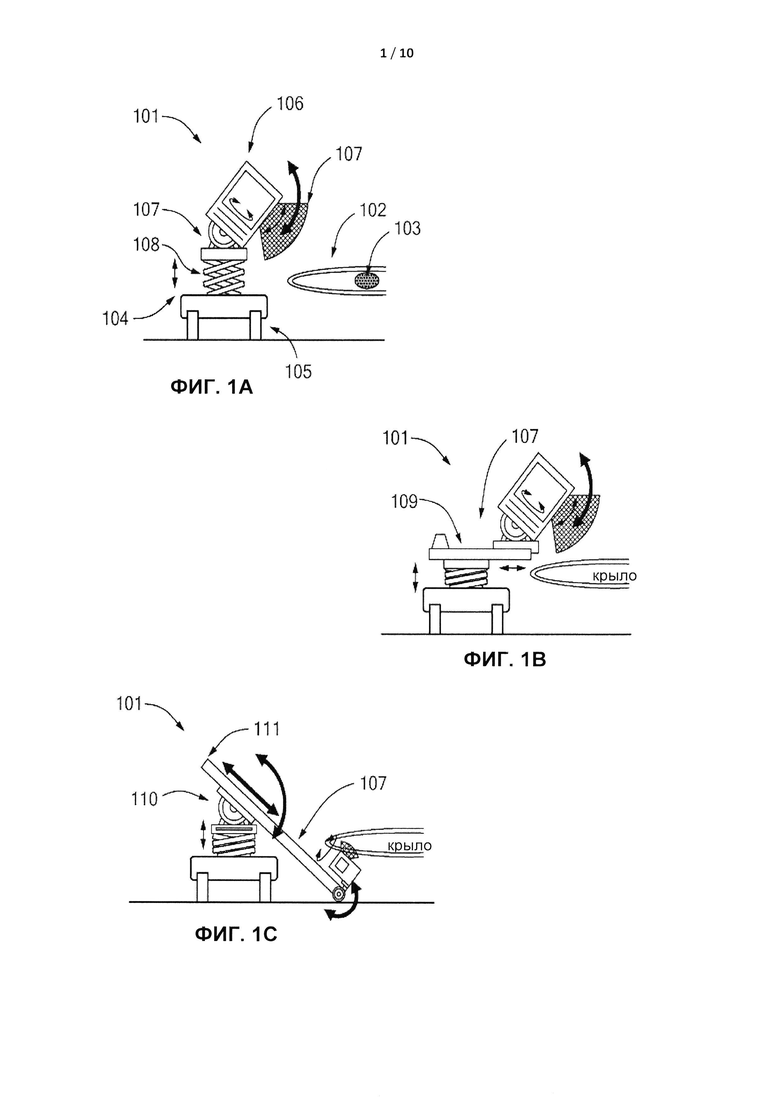




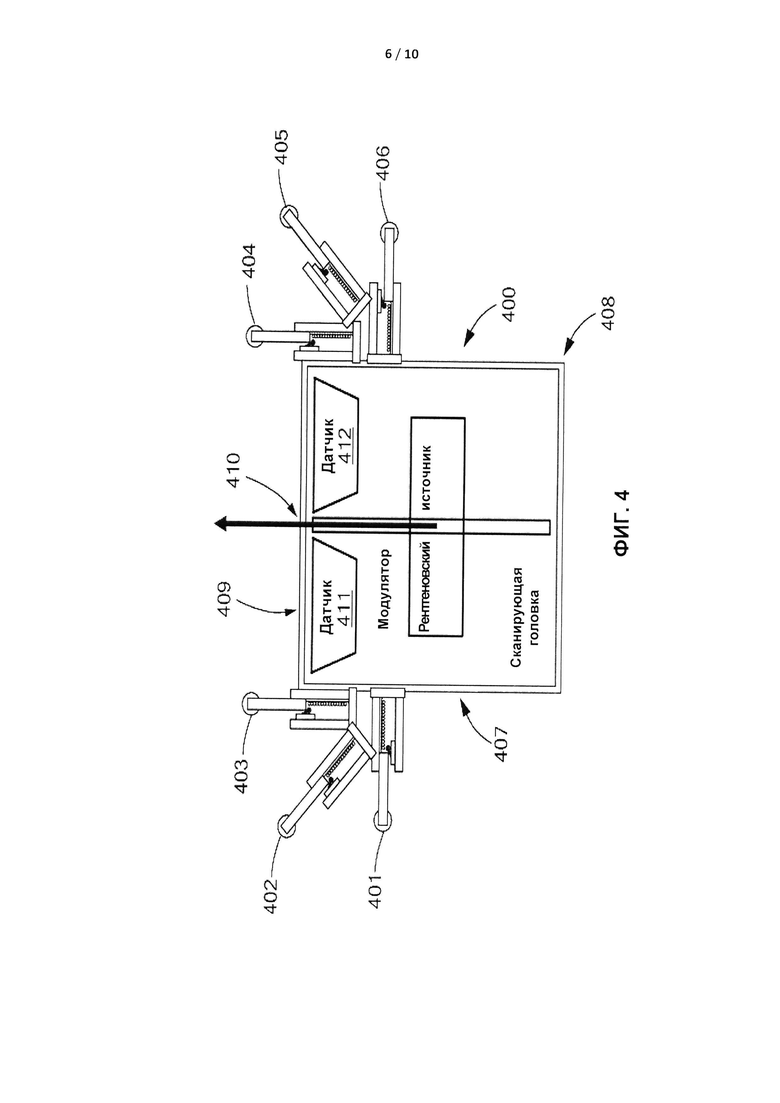

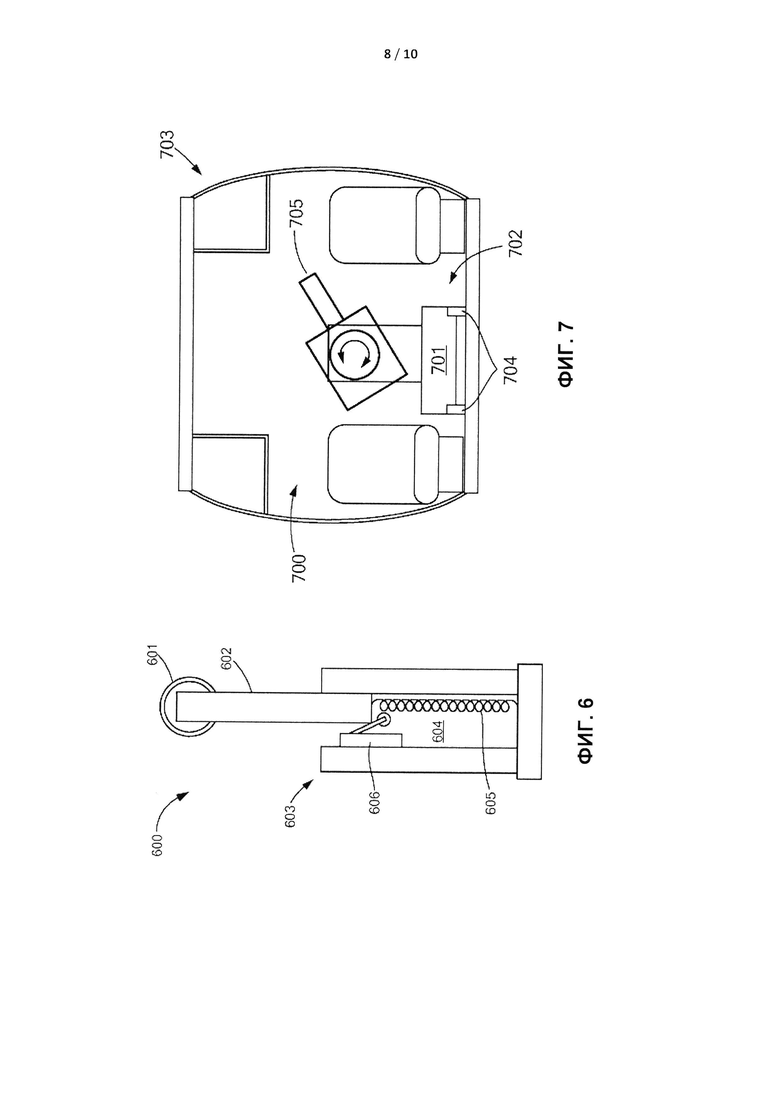

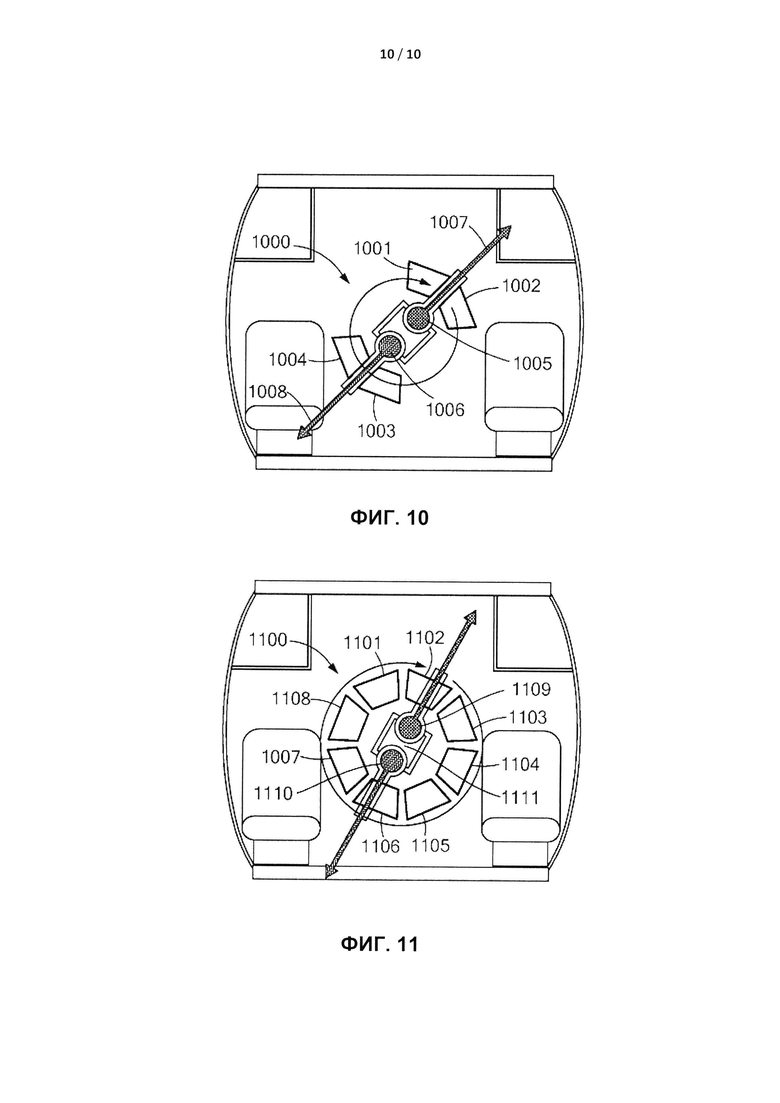
Использование: для обследования оборудования, содержащего неправильные поверхности, сжатые пространства и другие труднодоступные места, на основании регистрации обратнорассеянного проникающего излучения. Сущность изобретения заключается в том, что система обследования с обратным рассеянием и быстрым позиционированием, содержащая: мобильное основание, выполненное с возможностью легкоуправляемого перемещения по земле; стрелу, соединенную с основанием и содержащую первый участок, второй участок и третий участок, а также первое подвижное соединение, соединяющее первый участок со вторым участком, и второе подвижное соединение, соединяющее второй участок с третьим участком; сканирующую головку, соединенную с третьим участком и содержащую: источник проникающего излучения для генерирования остронаправленного луча проникающего излучения, характеризующегося осью луча, и первый датчик, выполненный с возможностью регистрации рассеянного проникающего излучения; причем сканирующая головка выполнена с возможностью перемещения по меньшей мере с 3-7 степенями свободы относительно основания, а указанная система выполнена с возможностью захвата излучения обратного рассеяния во множестве ориентаций путем перемещения сканирующей головки при одновременном сохранении первым участком неподвижного положения по отношению к основанию, причем по меньшей мере один датчик приближения, прикрепленный к сканирующей головке, выполнен с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси. Технический результат: обеспечение возможности обследования оборудования, содержащего неправильные поверхности, сжатые пространства и другие труднодоступные места, на основании регистрации обратнорассеянного проникающего излучения. 3 н. и 7 з.п. ф-лы, 16 ил.
1. Система обследования с обратным рассеянием и быстрым позиционированием, содержащая:
мобильное основание, выполненное с возможностью легкоуправляемого перемещения по земле;
стрелу, соединенную с основанием и содержащую первый участок, второй участок и третий участок, а также первое подвижное соединение, соединяющее первый участок со вторым участком, и второе подвижное соединение, соединяющее второй участок с третьим участком;
сканирующую головку, соединенную с третьим участком и содержащую:
источник проникающего излучения для генерирования остронаправленного луча проникающего излучения, характеризующегося осью луча, и
первый датчик, выполненный с возможностью регистрации рассеянного проникающего излучения;
причем сканирующая головка выполнена с возможностью перемещения по меньшей мере с 3-7 степенями свободы относительно основания, а указанная система выполнена с возможностью захвата излучения обратного рассеяния во множестве ориентаций путем перемещения сканирующей головки при одновременном сохранении первым участком неподвижного положения по отношению к основанию,
причем по меньшей мере один датчик приближения, прикрепленный к сканирующей головке, выполнен с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси.
2. Система обследования с обратным рассеянием и быстрым позиционированием по п. 1, в которой по меньшей мере один участок из первого и второго участков выполнен с возможностью удлинения.
3. Система обследования с обратным рассеянием и быстрым позиционированием по п. 1, в которой третий участок имеет ось вдоль его длины, а сканирующая головка выполнена с возможностью поворота вокруг оси.
4. Система обследования с обратным рассеянием и быстрым позиционированием по п. 1, в которой сканирующая головка имеет такой размер, что она выполнена с возможностью размещения в обследуемом объекте.
5. Способ захвата изображения обратного рассеяния, полученного путем облучения поверхности, расположенной внутри объекта, включающий:
позиционирование системы обследования с обратным рассеянием вплотную к объекту, причем система обследования с обратным рассеянием содержит основание, удлиняемую стрелу, скрепленную с основанием и содержащую по меньшей мере два участка, соединенные посредством подвижного соединения, сканирующую головку, расположенную на дальнем конце стрелы, и по меньшей мере один датчик приближения, прикрепленный к сканирующей головке и выполненный с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси;
управление стрелой для ее удлинения от основания через канал в объекте по направлению к объему внутри объекта;
облучение поверхности внутри объекта с использованием остронаправленного луча проникающего излучения;
прием излучения обратного рассеяния в сканирующей головке и
обработку излучения обратного рассеяния для формирования изображения части внутреннего объема объекта.
6. Способ захвата изображения обратного рассеяния по п. 5, дополнительно включающий:
управление сканирующей головкой для ее последовательного ориентирования во множестве ориентаций в объеме внутри объекта.
7. Подвижная система обследования с обратным рассеянием для исследования объекта, содержащая:
подвижное основание;
источник остронаправленного луча проникающего излучения, имеющий ось передачи;
сканирующую головку, соединенную с основанием и содержащую по меньшей мере один датчик, характеризующийся вектором выравнивания, причем ось излучения ориентирована по существу в том же самом направлении, что и вектор выравнивания, так что указанный датчик ориентирован для приема обратного рассеяния проникающего излучения; и
по меньшей мере один датчик приближения, прикрепленный к сканирующей головке и выполненный с возможностью регистрации первого заданного интервала между сканирующей головкой и объектом вдоль первой оси.
8. Подвижная система обследования с обратным рассеянием по п. 7, дополнительно содержащая второй датчик приближения, выполненный с возможностью регистрации второго заданного интервала между сканирующей головкой и объектом вдоль второй оси, причем вторая ось не параллельна первой оси.
9. Подвижная система обследования с обратным рассеянием по п. 8, дополнительно содержащая третий датчик приближения, выполненный с возможностью регистрации третьего заданного интервала между сканирующей головкой и объектом вдоль третьей оси, причем третья ось непараллельна первой оси или второй оси, а указанные датчики образуют измерительный пузырь вокруг части сканирующей головки.
10. Подвижная система обследования с обратным рассеянием по п. 9, в которой три оси расположены взаимно перпендикулярно.
| US 20070269006A1, 22.11.2007;US 20070269006A1, 22.11.2007;US 20070269006A1, 22.11.2007;US 6064717A, 16.05.2000;В.Коснырев, Датчики приближения компании KLASCHKA, Электроника: Наука, Технология, Бизнес, 4/2007, всего 7 стр., весь документ;ProvibTech, Innovative Machine Monitoring, 01.07.2007, всего 14 стр., стр | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |

