Область техники, к которой относится изобретение
Данное изобретение относится к области рентгеноскопического досмотра людей, упакованного багажа или иных объектов с целью обнаружения сокрытых предметов.
Уровень техники
Существующие системы интраскопии, использующие эффект обратного рассеяния в миллиметровом диапазоне длин волн, могут формировать изображения поверхности сканируемого объекта, но из-за малой глубины проникновения излучения не позволяют обнаружить предметы поиска, находящиеся на противоположной стороне объекта, а также предметы поиска, возвращающие сигнал, аналогичный сигналу от фона, или искусно скрытые в исследуемом объекте.
Для того, чтобы повысить эффективность обнаружения скрываемых предметов в интраскопах, может потребоваться дополнительное сканирование, часто требующее переустановки исследуемого объекта в зоне сканирования. Эти дополнительные мероприятия увеличивают, возможно, эффективность поиска, но заведомо понижают пропускную способность поисковых систем, чье основное назначение заключается именно в том, чтобы исследовать большие потоки грузов и людей.
Для многих практически важных применений требуются системы сканирования, которые сочетали бы высокое качество сформированных изображений с высокой производительностью, подвергая при этом исследуемые объекты только малым дозам радиоактивного излучения.
Соответственно данное изобретение предлагает устройство, способ досмотра, которые способны достичь желаемых целей.
Раскрытие изобретения
В предпочтительном варианте осуществления изобретения предлагается устройство, которое распознает характерные особенности материалов, из которых могут быть изготовлены объекты и предметы поиска, а в определенных вариантах может формировать по меньшей мере одно изображение объекта. Устройство включает первую каретку, вторую каретку, по меньшей мере один механизм вертикального позиционирования и по меньшей мере один датчик. Каждая каретка включает в себя источник проникающего излучения, испускающий луч излучения, направленный на исследуемый объект. Механизм позиционирования обеспечивает синхронное перемещение кареток относительно исследуемого объекта в направлении, имеющем вертикальную составляющую. Излучение по меньшей мере одного из источников, после взаимодействия с исследуемым объектом принимает по меньшей мере один из датчиков. Датчик может быть расположен на первой каретке. Исследуемый объект может быть человеком.
Проникающим излучением, производимым каждым источником, может быть рентгеновское излучение. Каждый источник может быть выполнен так, чтобы поток излучения имел форму остронаправленного луча. Каждый источник может иметь сканер, приспособленный для перемещения луча проникающего излучения, производимого источником, перпендикулярно направлению движения каретки. Каждая развертка может иметь форму обтюратора, что способно обеспечить черезстрочный порядок лучей (сканирование в черезстрочном режиме).
Каждая каретка может включать в себя группу датчиков. Каждая группа датчиков может включать в себя по меньшей мере один датчик рассеянного излучения и один датчик сквозного излучения.
Лучи проникающего излучения, испущенные от первой и второй кареток, имеют в основном противоположные направления распространения.
Датчик проникающего излучения первой каретки может быть расположен на той же высоте, что и соответствующий источник проникающего излучения второй каретки.
В одном из вариантов осуществления настоящего изобретения первая и вторая каретки могут быть объединены. Обе каретки могут быть размещены на единой механической платформе, причем по меньшей мере один механизм позиционирования может быть выполнен с возможностью движения платформы в направлении, имеющем вертикальную составляющую.
В другом варианте осуществления настоящего изобретения каждый источник проникающего излучения может включаться в импульсном режиме, что образует перекрестную модель просвечивания.
В определенных осуществлениях настоящего изобретения устройство может включать в себя датчик смещения.
Механизм позиционирования может включать в себя по меньшей мере один роторный двигатель, соединенный с направляющим винтом, реечно-шестеренчатой передачей, электромеханический привод, гидравлический поршень или ременную передачу в зависимости от назначения соответствующего варианта осуществления.
Устройство может включать в себя процессор для приема сигнала от по меньшей мере одного датчика и для формирования изображения, посредством по меньшей мере сигнала, может также включать процессор, программно объединяющий изображения, основанные на сигналах от всех датчиков, используемых в соответствующем варианте осуществления.
Возможно также осуществление устройства, в котором каретки и по меньшей мере один механизм позиционирования во время работы помещаются в корпус. На корпусе устройства может быть установлен по меньшей мере один стационарный датчик. Параметры среды внутри корпуса могут быть управляемыми, при этом внутреннее пространство корпуса может быть изолировано от окружающей среды.
Возможно такое осуществление настоящего изобретения, при котором каждый источник проникающего излучения работает в импульсном режиме, сканируя исследуемый объект периодически.
В другом осуществлении настоящего изобретения для определения характеристик материала, из которого изготовлен предмет поиска, оборудование включает первую каретку, вторую каретку и по меньшей мере один механизм позиционирования. Первая каретка содержит источник проникающего излучения, направленного на исследуемый объект, и первый датчик для приема рассеянного объектом излучения. Вторая каретка содержит второй датчик для приема проникающего излучения от источника, расположенного на первой каретке, т.е. излучения, прошедшего сквозь объект. Для синхронного изменения положения обеих кареток относительно исследуемого объекта в направлении, имеющем вертикальную составляющую, используется по меньшей мере один механизм позиционирования. Механизм позиционирования может воздействовать на первую каретку, чтобы изменять относительное положение источника проникающего излучения на первой каретке в соответствии с назначением исследования объекта.
В другом осуществлении настоящего изобретения, предназначенном для определения характеристик материала объекта исследования, устройство включает в себя две вертикально ориентированных матрицы источников излучения, по меньшей мере один датчик для регистрации излучения от по меньшей мере одного источника после взаимодействия излучения с исследуемым объектом, а также контроллер для включения по меньшей мере одного источника проникающего излучения из по меньшей мере одной матрицы источников независимо от других источников той же матрицы.
В другом варианте осуществления по меньшей мере один датчик включает две вертикально ориентированные матрицы датчиков и процессор для обработки данных рентгеноскопического просвечивания, получаемых от каждого из датчиков через установленные временные интервалы.
Другой вариант предполагает включение сканера, управляющего движением по меньшей мере одного луча проникающего излучения от по меньшей мере одного источника.
В соответствии с еще одним возможным осуществлением настоящего изобретения предложен способ досмотра исследуемого объекта. Способ включает в себя: движение первой каретки, содержащей первый источник луча проникающего излучения, направленного на объект исследования, синхронное с первой кареткой движение второй каретки, содержащей второй источник луча проникающего излучения, прием на по меньшей мере один датчик излучения от по меньшей мере одного источника после взаимодействия излучения с объектом исследования, формирование выходного сигнала, содержащего информацию об излучении, зарегистрированном по меньшей мере одним из датчиков и выработка характеристики объекта исследования, основанной на информации выходного сигнала. По меньшей мере один датчик может быть установлен на по меньшей мере одной из кареток.
В близком по назначению осуществлении этот способ исследования объекта включает в себя сканирование объекта лучом проникающего излучения от источника в направлении, перпендикулярном направлению движения кареток.
В другом близком варианте осуществления этот способ включает в себя формирование изображения с помощью излучения, полученного первым и вторым датчиками.
Возможен также вариант осуществления настоящего изобретения, в котором способ исследования объекта состоит из следующих этапов: сканирование объекта лучом проникающего излучения от источника на второй каретке в направлении, перпендикулярном направлению движения кареток, формирование выходного сигнала, основанного на информации об излучении, принятом первым и вторым датчиками, и создание изображения, основанного на информации от обоих лучей проникающего излучения. В любом из описанных вариантов способа исследования объекта самим исследуемым объектом может быть человек.
В соответствии с другим осуществлением настоящего изобретения предложен иной способ исследования объекта. Способ включает индуцирование лучей проникающего излучения при временном подъеме источников, при этом лучи проникающего излучения создаются по меньшей мере одним первым источником, расположенным так, чтобы направлять излучение в первом направлении в сторону объекта и по меньшей мере одним вторым источником, расположенным так, чтобы направлять луч проникающего излучения во втором направлении в сторону объекта и регистрация по меньшей мере одним датчиком излучения от по меньшей мере одного источника после взаимодействия излучения с объектом исследования. По меньшей мере один первый источник может представлять собой первую группу источников, расположенных на разных высотах, и по меньшей мере один второй источник может представлять собой вторую группу источников, расположенных на разных высотах.
Краткое описание чертежей
Последующее описание будет проиллюстрировано фигурами:
Фиг.1 - схематическое изображение осуществления настоящего изобретения досмотра человека, входящего в интраскоп.
Фиг.2 и 3 поясняют механизм позиционирования с направляющим винтом, поднимающим каретку.
Фиг.4 - вид сверху на два источника излучения и два обтюратора, выполненных так, чтобы источники могли попеременно досматривать объект.
Фиг.5 - интраскопическое устройство, расположенное внутри корпуса.
Фиг.6 - схематическое изображение источника рентгеновского излучения, индуцируемого с помощью электронной эмиссии.
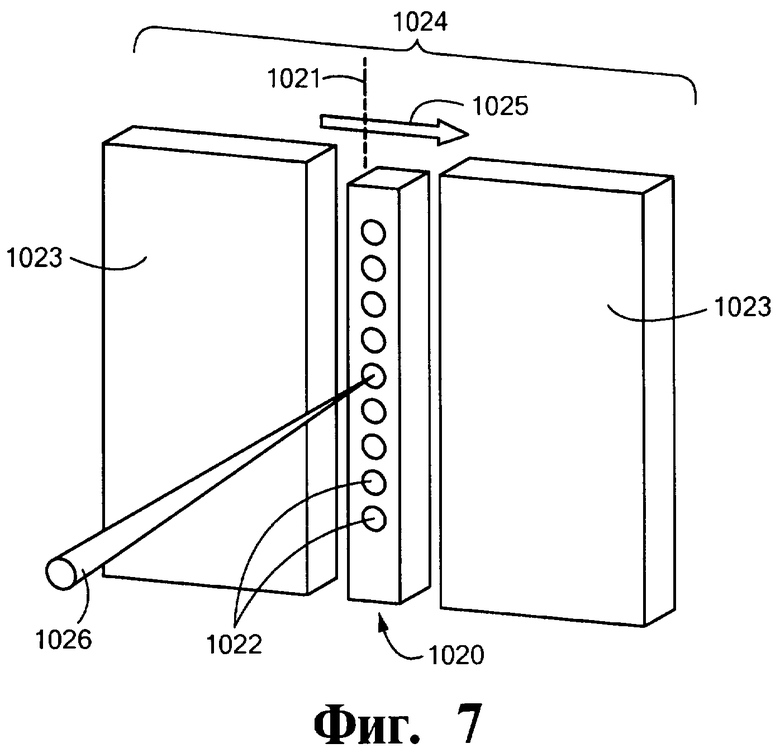
Фиг.7 - применение одномерной матрицы независимых источников излучения в случае измерения обратнорассеянного излучения.
Фиг.8 - применение двумерной матрицы независимых источников излучения в случае измерения обратнорассеянного излучения.
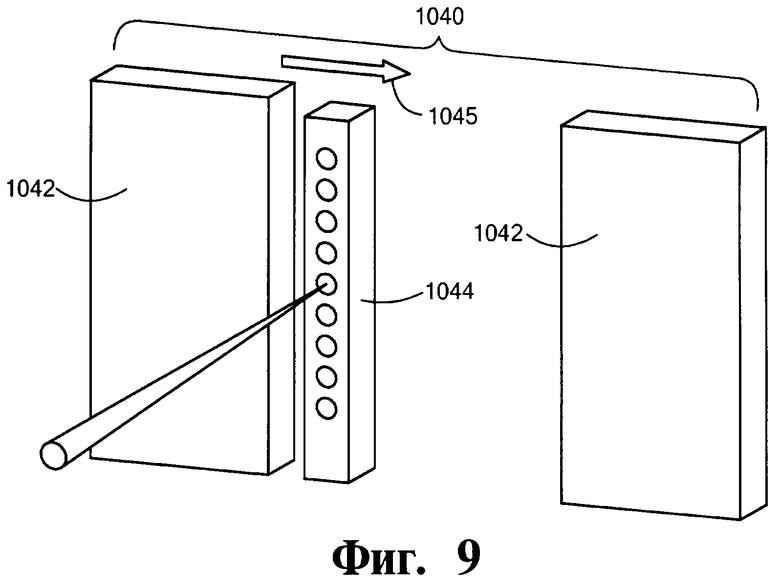
Фиг.9 - применение одномерной матрицы независимых источников проникающего излучения и группы датчиков обратнорассеянного излучения.
Фиг.10 - интраскоп, в котором группа одномерных матриц источников излучения, установленных на едином цилиндре.
Фиг.11 - вид спереди на устройство, в котором лучи направлены на объект сверху.
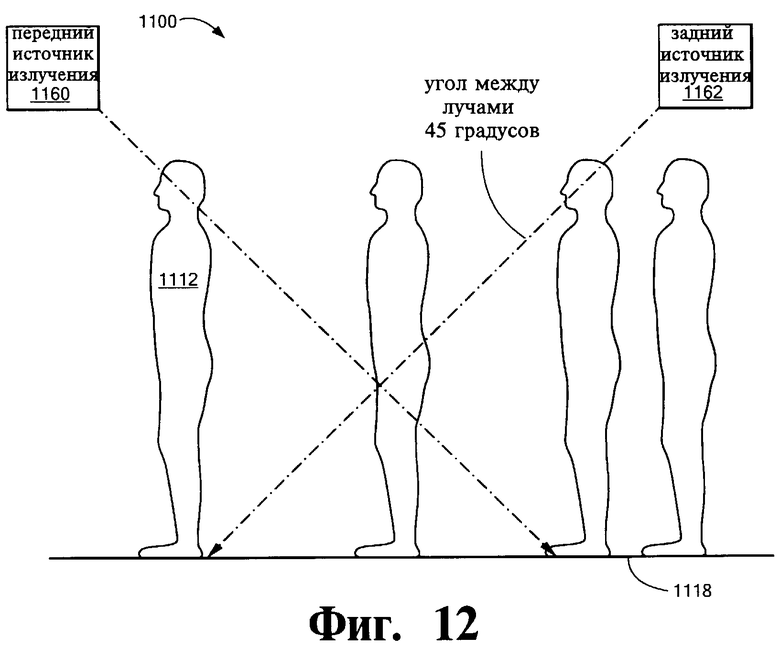
Фиг.12 - вид сбоку на устройство, в котором человек просвечивается группой лучей рентгеновского излучения, направленными на объект сверху.
Фиг.13 - вид спереди на устройство, в котором лучи направлены на объект с противоположных сторон.
Фиг.14 - схематичный вид сбоку на устройство, в котором человек просвечивается группой лучей излучения, направленных на объект сверху.
Фиг.15 - схематичное поперечное сечение интраскопа, который использует группу систем регистрации обратнорассеянного излучения.
Фиг.16 - вид сбоку интраскопа, представленного на фиг.12.
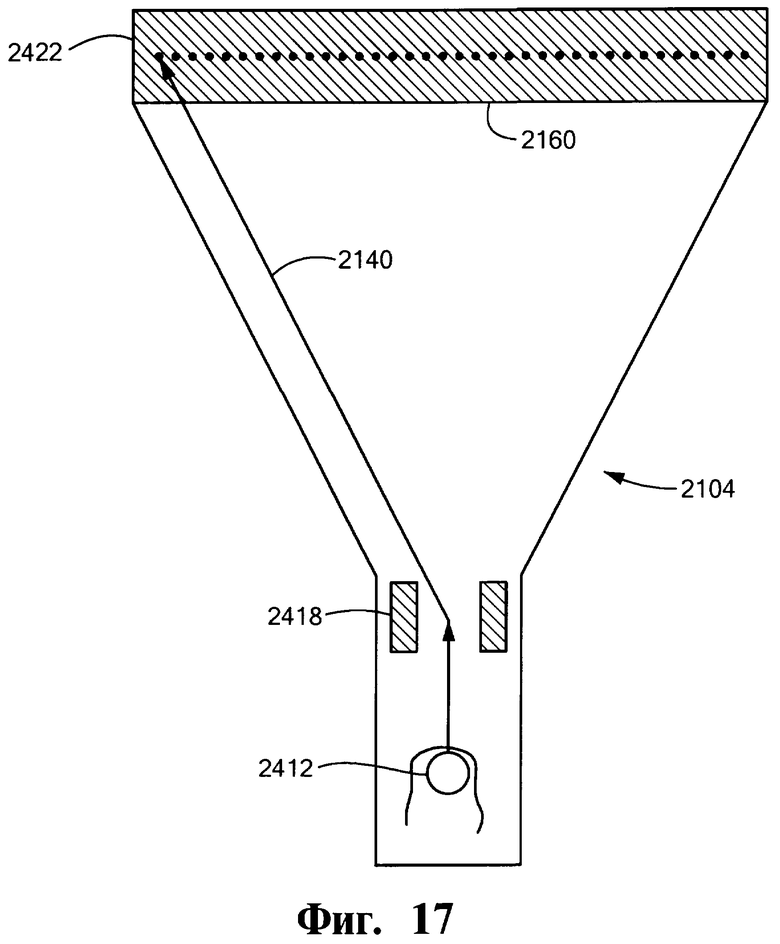
Фиг.17 - схема системы с обратнорассеянным излучением, использующей электромагнитный досмотр.
Осуществление изобретения
В данном описании и последующих пунктах формулы изобретения следующие термины должны использоваться в указанном ниже значении, независимо от их значений в каком-либо ином контексте.
"Каретка" - подвижный узел, включающий источник и/или датчик излучения. Каретка может содержать датчик излучения, однако это не является обязательным.
"Механизм позиционирования" - компонент устройства, обеспечивающий перемещение каретки в направлении, имеющем вертикальную составляющую. Он может содержать силовой привод (например, двигатель) и необходимые элементы трансмиссии.
"Вертикально расположенная матрица" - ряд элементов устройства, прежде всего - источников или датчиков излучения, расположенных в виде конфигурации, имеющей вертикальное измерение, так что по меньшей мере один источник в вертикально расположенной матрице находится на высоте, отличающейся от высоты по меньшей мере одного другого источника, находящегося в той же матрице.
Фиг.1 представляет собой схематическое изображение одного из конструктивных осуществлений настоящего изобретения, в котором осуществляется досмотр человека, вошедшего в зону действия интраскопирующего устройства. Интраскопирующее устройство, изображенное на фиг.1 и обозначенное как позиция 10, содержит два различных источника проникающего излучения, которые сканируют объект за один проход и формируют изображения результатов сканирования с двух противоположных сторон объекта, что позволяет эффективно идентифицировать любой скрытый объект. Проникающее излучение, индуцируемое каждым источником, представляет собой электромагнитное излучение, такое как рентгеновское или субмиллиметровое излучение, однако при определенных обстоятельствах может оказаться полезным использование электромагнитных излучений в иных частотных диапазонах или использование эмиссии проникающих частиц, таких как барионы. Поскольку источников проникающего излучения несколько, и они находятся на разных каретках, это значительно облегчает формирование изображения исследуемого объекта. Оборудование может создавать различные изображения, включая изображения на основе рассеянного излучения и/или сквозного излучения, регистрируемого с каждой стороны и/или сверху объекта. Возможно одновременное формирование разных изображений. Одновременно формируемые изображения могут комбинироваться с использованием любых программных способов. Источник 102 проникающего излучения, расположенный на предлагаемом устройстве, установлен на каретке 100. На каретке 100 также может быть установлен один датчик или более. В иллюстративных целях на фигуре показаны три датчика. Из них датчик 104 предназначен для регистрации пряморассеянного излучения, датчик 106 предназначен для регистрации сквозного излучения и датчик 105 предназначен также для регистрации пряморассеянного излучения. Специалисты в данной области техники оценят техническое решение, примененное в изобретении, в соответствии с которым количество датчиков на каждой каретке не ограничено тремя, при этом никак не ограничивается и тип датчиков. В частности, каждый датчик может быть выполнен с возможностью регистрировать более чем один тип излучения. Каретка может содержать один или более датчиков, а каждый датчик может быть выполнен с возможностью регистрировать пряморассеянное, сквозное или обратнорассеянное излучения.
Чувствительность датчика к определенному виду излучения достигается путем изменения выходного сигнала датчика, периода регистрации и/или его чувствительности. Например, каждый датчик может передать распознанный сигнал в процессор, специально предназначенный для обработки сигналов с датчиков. В зависимости от назначения процессор может быть выполнен для конкретного излучения в конкретном временном интервале. Так, если в заданном интервале времени источник 102 создает поток проникающего излучения, то датчики 104, 105 и 106 могут быть выполнены для приема обратнорассеянного излучения, датчики 114 и 115 - для приема пряморассеянного излучения, а датчик 116 - для приема сквозного сигнала. Аналогичным образом в ином временном интервале, когда проникающее излучение создает источник 112, датчики 114, 115 и 116 могут быть приемниками обратнорассеянного излучения, датчики 104 и 105 могут быть приемниками пряморассеянного излучения, а датчик 106 может принимать сигнал от сквозного излучения. Это только один пример того, каким образом могут использоваться и управляться датчики излучения и каковы задачи матрицы датчиков в системе в случае ее использования. Таким образом, в соответствии с различными вариантами осуществления настоящего изобретения возможны самые разнообразные конфигурации, включая те, которые, возможно, не получили детального описания.
Каретка 110, выполнение которой аналогично каретке 100, содержит три установленных на ней датчика. Три датчика, установленные на каретке 110, включают в себя датчик 114 для регистрации пряморассеянного излучения, датчик 116 для регистрации сквозного излучения и датчик 115 для регистрации пряморассеянного излучения. Эти датчики, точно так же как и аналогичные датчики на каретке 100, могут быть выполнены, как указывалось в вышеприведенном примере, для регистрации каждого типа излучения, т.е. пряморассеянного, сквозного и/или обратнорассеянного излучения.
Каретки 100 и 110 устанавливаются в зоне сканирования на одной высоте. Каждая из кареток 100 и 110 снабжена собственным вертикальным механизмом позиционирования, перемещающим каретки вдоль траекторий, в дальнейшем изображаемых на фиг.2 линиями 108 и 118 соответственно. Механизм позиционирования перемещает каретки преимущественно в вертикальном направлении с одинаковой скоростью, так что в процессе своих перемещений каретки оказываются на одной высоте относительно друг друга.
Устройство досмотра, иллюстрируемое далее, включает стационарный датчик 122 бокового рассеянного излучения, который в процессе сканирования регистрирует излучение, направленное по существу вертикально.
Источник проникающего излучения, изображенный на фиг.1, сканирует объект 120 горизонтально, при этом обе каретки одновременно и синхронно перемещаются в вертикальном направлении, и излучение от первого источника, расположенного на первой каретке, после взаимодействия излучения с объектом может регистрироваться датчиками, расположенными на противоположно установленной второй каретке. В дополнении к этому излучение от второго источника, расположенного на второй каретке, после взаимодействия излучения с объектом может регистрироваться датчиками, размещенными на противоположной первой каретке. Тип излучения может быть сквозным или рассеянным. Хотя на фиг.1 датчики обратнорассеянного излучения не отмечены на каретках явно, каретки могут быть снабжены и датчиками обратнорассеянного излучения. В осуществлении изобретения, включающем датчик обратнорассеянного излучения, этот датчик может быть настроен на прием излучения от источника, расположенного на той же каретке, что и он сам, как объяснено в вышеприведенном примере.
В предпочтительном варианте осуществления изобретения источники проникающего излучения на каждой каретке могут быть настроены таким образом, чтобы сделать рентгеновский луч остронаправленным. Это может быть достигнуто путем использования коллиматора или любого другого приспособления для фокусировки узкого луча проникающего излучения. Помимо этого в предпочтительном осуществлении изобретения источник проникающего излучения может быть настроен для сканирования объекта в направлении, перпендикулярном к преимущественно вертикальному направлению смещения кареток. Сканирование может осуществляться с помощью устройств, которые могут включать, но не исчерпываются такими техническими решениями, как обтюратор, устройства электромагнитного управления или любые другие сканирующие системы.
Фиг.1 также иллюстрирует положение датчиков, расположенных на одной каретке, относительно источников проникающего излучения, расположенных на другой каретке, что характерно для описываемой конструкции. В том осуществлении изобретения, которое представлено на фиг.1, каждый источник проникающего излучения находится в положении, которое соответствует высоте расположения или уровню подъема противоположно размещенного датчика, что соответствует случаю использования сквозного излучения. Видно, что датчик 116 с каретки 110 находится на той же высоте, что и источник проникающего излучения 102 на каретке 100, и наоборот, источник проникающего излучения 112 на каретке 110 находится напротив датчика 106 с каретки 100.
На каждой каретке два датчика, предназначенные для регистрации пряморассеянного излучения, размещены с вертикальным сдвигом по отношению к соответствующим источникам проникающего излучения, что позволяет им регистрировать излучение, рассеянное от взаимодействия рентгеновского луча с объектом исследования. Хотя датчик 106 может быть выполнен для регистрации рассеянного излучения, датчики 104 и 105 могут в большей степени, чем датчик 106, соответствовать назначению регистрации пряморассеянного излучения от источника проникающего излучения 112 после взаимодействия излучения с объектом, находящимся между каретками. Точно так же датчик 116 может быть выполнен для регистрации пряморассеянного излучения от луча проникающего излучения из источника 102 после взаимодействия излучения с объектом исследования, но использование датчиков 114 и 115 может оказаться более оптимальным для этой цели, чем использование датчика 116, из-за вертикального сдвига датчиков 114 и 115 относительно источника 102.
Скоординированное движение кареток может быть достигнуто путем их конструктивного соединения в единый структурный блок.
Во время практического использования данного оборудования объект находится в зоне обзора системы, а каретки в процессе сканирования объекта смещаются вертикально, что позволяет произвести сканирование с по меньшей мере двух сторон за один проход. Когда в портале для сканирования появляется новый объект, каретки могут начать сканирование объекта со своего текущего положения, обусловленного вертикальным смещением в процессе предыдущего сканирования. Например, если один объект сканируется, когда каретки смещены в вертикальном направлении вниз, то после того, как сканирование завершено и в области обзора появляется следующий объект, этот объект может сканироваться в процессе движения кареток вверх.
В другом варианте осуществления настоящего изобретения каждая каретка может содержать источники проникающего излучения без каких-либо датчиков, соединенных с подвижными каретками. Например, каретки 100 и 110 могут использоваться без любого из датчиков 104, 105, 106, 114, 115 и 116. В этом случае для регистрации сквозного и/или рассеянного излучения могут быть применены стационарные датчики, а источники проникающего излучения могут включаться попеременно при движении кареток. Этот пример требует применения стационарных реконфигурируемых датчиков, которые могут быть собраны в матрицу размером приблизительно с длину хода кареток, что позволит им регистрировать проникающее излучение подобно тому, как это делается с помощью датчиков, размещенных на каретках согласно чертежам на фиг.1.
Хотя на фиг.1 каждая каретка изображена с размещенными на них источниками проникающего излучения, в рамках предлагаемого изобретения можно устанавливать источники излучения также лишь на одной из двух кареток, при этом датчик рассеянного сигнала следует размещать на той же каретке, что и источник излучения, а соответствующие датчики сквозного и пряморассеянного излучения на противоположной каретке. Оборудование, представленное на фиг.1, для получения изображения исследуемого объекта 120 позволяет размещать только один источник проникающего излучения на одной каретке и один датчик на противоположной каретке.
На фиг.2 представлено соединенное с кареткой позиционирующее устройство типа направляющего винта. Интраскопическое устройство, обозначенное как позиция 11, содержит направляющие винты 200 и 210, соединенные с каретками 100 и 110, так что при одновременном вращении направляющих винтов двигателями 201 и 202, называемыми здесь механизмами позиционирования, каретки 100 и 110 двигаются в вертикальном направлении, каждая вдоль оси вращения соответствующего направляющего винта. Фиг.2 иллюстрирует один тип позиционирующего устройства, которое в настоящем изобретении обеспечивает необходимые перемещения кареток, однако в практических осуществлениях изобретения возможно применение и других систем, способных перемещать каретки. Такие системы могут включать направляющие стойки и ведущие шестерни, электромеханические устройства движения кареток, гидравлические устройства или систему блоков, чем возможные технические решения не ограничиваются. Настоящее изобретение также предлагает возможность перемещения кареток с помощью одного механизма перемещения, соединенного с обеими каретками. Так, механизм позиционирования может быть единой конструкцией в виде механической платформы, соединенной более чем с одной кареткой. Механизм позиционирования может дополнительно или альтернативно включать в себя систему, допускающую движение каретки или кареток в направлении или направлениях, отличающихся от вертикального. Любая из описанных систем или любой механизм позиционирования, пригодный для использования, может управляться контроллером, содержащим датчик перемещения 212 для отслеживания перемещений кареток в требуемое положение или перемещения их на требуемое расстояние. Контроллер может, кроме того, управлять скоростью движения кареток или любым другим необходимым параметром движения кареток.
Возможно осуществление, в котором механизм позиционирования, вместо того, чтобы быть соединенным с каретками, будет соединен с каким-либо элементом, на котором, в свою очередь, будет располагаться объект исследования 120. В осуществлении, в котором механизм позиционирования соединен с каким-либо элементом, на котором будет располагаться объект исследования 120, механическая платформа между двумя каретками, механизм позиционирования может изменять высоту положения этого элемента в направлении, имеющем вертикальную составляющую, так что в результате этого движения исследуемый объект или некоторая область объекта может быть отсканирована с кареток. В этом осуществлении достигается тот же эффект в формировании изображений исследуемого объекта, что и в вышеописанном осуществлении при синхронном движении кареток в направлении, имеющем вертикальную составляющую, так как оба осуществления настоящего изобретения обеспечивают изменение относительного положения объекта исследования и кареток, но не изменяют положения кареток относительно друг друга.
Фиг.3 представляет вид сбоку на устройство для сканирования человека, находящегося внутри интраскопа. Как было указано выше, источники проникающего излучения могут быть сдвинуты друг относительно друга таким образом, чтобы каждый источник оказался в положении, соответствующем высоте подъема или положению датчика, расположенного с противоположной стороны объекта исследования согласно желаемому типу сканирования. Например, датчик для регистрации сквозного излучения на одной из кареток располагается на той же высоте, которая соответствует источнику проникающего излучения, установленному на противоположной каретке. Интраскоп, обозначенный на фиг.3 позицией 12, изображен с описанным сдвигом источников проникающего излучения, а именно: источник 252 и источник 262 могут смещаться за счет смещения соответствующих кареток, т.е. каретки 250 и каретки 260. Например, если каретки выполнены аналогично друг другу с центральным расположением источника проникающего излучения, так что луч рентгеновского излучения исходит из центра каретки, каждая каретка должна смещаться своим механизмом позиционирования таким образом, чтобы одна каретка была сдвинута относительно другой, и соответственно один источник излучения был сдвинут в вертикальном направлении относительно другого источника. Такое расположение позволяет использовать реконфигурируемые датчики, что обсуждалось выше. В частности, в течение временного интервала, когда включен источник 252, датчики 253 и 254 могут регистрировать обратнорассеянное излучение, датчик 264 может регистрировать сигнал от сквозного излучения, а датчик 263 может регистрировать пряморассеянное излучение. А в дальнейшем, в течение временного интервала, когда включен источник 262, датчики 263 и 264 могут регистрировать обратнорассеянное излучение, датчик 253 может быть переконфигурирован для регистрации сквозного излучения, а датчик 254 может применяться для регистрации пряморассеянного излучения.
Кроме того, фиг.3 иллюстрирует положение направляющих винтов 251 и 261, на которых находятся каретки 250 и 260, двигающиеся при вращении винтов двигателями 255 и 265 преимущественно в вертикальном направлении.
Фиг.4 представляет собой вид сверху на два источника проникающего излучения с обтюраторами такой конструкции, чтобы источники излучения могли попеременно направлять лучи излучения на исследуемый объект. Интраскоп обозначен на фиг.4 позицией 13. Настоящее изобретение предусматривает возможность такой организации режима облучения исследуемых объектов, при котором источники проникающего излучения облучают объект в определенные временные интервалы. Это может быть достигнуто путем применения как постоянных источников излучения, так и пульсирующих источников, обеспечивающих излучение только в течение определенных временных интервалов. В случае использования постоянного источника излучения источник может быть снабжен обтюратором, который, например, имеет только число щелей, соответствующих половине обтюратора. В этом случае устройство должно быть снабжено контроллером для синхронизации излучения разных источников в течение определенных временных интервалов в требуемом порядке для обеспечения сканирования по всей ширине объекта с двух сторон. Одновременно с этим контроллер должен синхронизировать и движение кареток в преимущественно вертикальном направлении с помощью механизмов позиционирования или одного механизма позиционирования.
На фиг.4 первая каретка 300 и вторая каретка 310 показаны сверху. На каретках размещены источники проникающего излучения 301 и 311, их излучение отмечено позициями 302 и 312. Область облучения объекта проникающим излучением характеризуется техническими характеристиками источников, ограничения на нее на иллюстрации не рассматриваются. Область облучения - это область, в которой луч излучения может производить сканирование или осуществлять развертку. Эта область иллюстрируется линиями 305 и 315. Линии 315 характеризуют область или окно, в котором осуществляется развертка луча излучения, испускаемого источником 311. Линии 305 изображают область или окно, в котором осуществляется развертка луча излучения, испускаемого источником 301. Исследуемый объект размещен между каретками, что показано с помощью маркера 320. Источники проникающего излучения испускают лучи излучения, развертка которых осуществляется с помощью обтюраторов 304 и 314. Обтюраторы содержат отверстия 303 и 313, которые позволяют проникающему излучению, испускаемому соответствующими источниками, проходить сквозь обтюратор при его движении, каковым преимущественно является вращение. Движение обтюраторов может быть также осциллирующим вращением или любым другим видом движения, создающим необходимый режим сканирования объекта с помощью излучения. Обтюраторы выполняются таким образом, чтобы надежно экранировать излучение в течение тех интервалов времени, когда отверстия 303 и 313 не находятся на пути рентгеновского излучения от соответствующих источников. Для этих целей обтюраторы изготавливают из свинца или иного подходящего материала, который надежно экранирует излучение используемого источника. Как показано на фиг.4, луч 316 осуществляет развертку в зоне 315 одновременно с тем, что обтюратор 304 перекрывает путь распространения излучения 302, испускаемого источником 301. Луч излучения продолжает пульсировать в процессе развертки, в то время как каретки движутся в вертикальном направлении - перпендикулярно плоскости чертежа или из плоскости чертежа - с целью полного сканирования объекта. Практически могут использоваться различные альтернативные схемы сканирования с перемежающимися излучениями.
Фиг.5 представляет систему сканирования, помещенную внутрь корпуса, содержащую каретки и по меньшей мере один механизм позиционирования, в процессе работы. Корпус 450 может состоять из портала 451, куда объект исследования может войти для проведения сканирования. Корпус может быть выполнен мобильным. В корпусе размещены каретки 400 и 410, которые могут нести желаемые комбинации датчиков и источников проникающего излучения, требуемые для конкретных прикладных назначений. Каретки могут перемещаться в преимущественно вертикальном направлении. Внутри корпуса 450 может также размещаться стационарная система регистрации рассеянного излучения, отмеченная позицией 451. На корпусе могут быть установлены стационарные датчики с размещением их на полу, в верхней части или на любой из стенок корпуса-контейнера. Информация, получаемая от каждого из этих датчиков, может обрабатываться или просматриваться индивидуально или в сочетании с информацией, получаемой от другого датчика или других датчиков, включая датчики, расположенные на каретках, что позволит получить больше детальной информации о скрываемых предметах поиска в исследуемых объектах. Корпус может также включать в себя систему местного контроля, но может быть приспособлен и для работы с системой дистанционного управления и контроля. В корпусе может быть размещена система контроля окружающей среды, которая позволит регулировать такие параметры среды как температура, влажность, давление воздуха, микробиологический режим и уровень загрязнения. Внутреннее пространство корпуса может быть изолировано от окружающей среды.
В некоторых осуществлениях настоящего изобретения могут быть применены системы и способы контроля объектов с помощью проникающего излучения, которое используют множество источников излучения. Источники могут активизироваться индивидуально, как описано в патенте U.S. Patent Application Publication No. 2007/0258562, ссылки на который включены в данную заявку в полном объеме.
Источники рентгеновского излучения могут быть выполнены на базе автоэмиссионных катодов, дающих более высокое как пространственное, так и временное разрешение по сравнению с термоэлектронными источниками. Поскольку автоэммиссия электронов обеспечивается электрическими полями высоких энергий, то высоких температур не требуется, отчего такие источники излучения получили название холодных катодов. Лучи электронной эмиссии, излучаемые такими устройствами, могут иметь низкую расходимость, что значительно облегчает их фокусировку. С использованием современных технологий временной отклик источников излучения обеспечивает временное стробирование с частотами, сравнимыми с разрешением цепей управления, и практически измеряется наносекундами.
В работе Zhang et al., A Multi-beam X-ray Imaging System Based on Carbon Nanotube Field Emitters, in Medical Imaging 2006, (Proceedings of SPIE, Vol.6142, March 2, 2006) опубликована информация о том, что фирма Xintek, Inc. of Research Triangle Park, NC изготовила линейную матрицу из 5 источников рентгеновского излучения, каждый с фокальным пятном от 200 до 300 мм на базе использования электродов с углеродными нанотрубками (УНТ). Было заявлено об измерении потоков электронов в диапазоне 0.1-1 мА при уровне ускоряющего напряжения 46-60 кВ. Полученные оценки времени работы холодных катодов превысили 2000 часов. При ускоряющем напряжении 200 кВ был измерен поток электронов в 13 мА. Вышеупомянутая статья Zhang et al. включена в данную заявку путем ссылки. При нынешнем уровне развития техники нетрудно представить себе устройства с разрешением 1000 пикселей на метр и скоростью пульсации 10 МГц.
Использование холодных катодов УНТ в контексте применения их в качестве источников рентгеновского излучения обсуждается также в работе Cheng et al., Dynamic radiography using a carbon-nanotube-based field-emission X-ray source, 75 Rev. Sci. Instruments, p.3264 (2004), а использование матриц из источников проникающего излучения на холодных катодах описано в работе Zhang et al., Stationary scanningx-ray source based on carbon nanotube field emitters, 86 Appl. Phys. Lett., p.184104 20 (2005). Обе работы включены в заявку путем ссылок.
Кроме того, использование матриц из источников проникающего излучения на холодных катодах УНТ в томографии обсуждается в работе Zhang et al., A nanotube-based field emission x-ray source for microcomputed tomography, 76 Rev. Sci. Instruments, p.94301 (2005), которая также включена в заявку путем ссылки.
С отдельными источниками проникающего излучения на холодных катодах могут использоваться системы электронного включения источников. При этом с небольшой задержкой (в пределах наносекунд) в последовательном режиме формируются остронаправленные лучи излучения, как это часто практикуется в современной рентгеновской интраскопии. В качестве альтернативы могут использоваться разнообразные схемы включения источников проникающих излучений, обеспечивающие требуемый режим работы источников в требуемое время для кодировки сигнала. Развитие УНТ-технологии позволило преодолеть важную техническую проблему, связанную со стабильностью потоков электронов и временем работоспособности катодов.
Основные операции с источниками проникающего излучения на холодных катодах, обозначенных на фиг.6 позицией 1010, хорошо известны. Использование холодных катодов обеспечивает высокий уровень контроля. Напряжение Vgc между затвором 1012 и катодом 1014, контролируемое цепью управления 1013, вызывает поток электронов 1015, в то время как напряжение Vca между катодом 1014 и анодом 1016 управляет энергией электронов, сталкивающихся с анодом 1016, а напряжение, приложенное к фокусирующему электроду 1018, определяет размер пятна электронного пучка.
На фиг.6 изображен технологический узел, в котором рентгеновские лучи генерируются на отражающей мишени 1019, однако в рамках настоящего изобретения может использоваться также сквозная мишень.
Применение дискретных источников рентгеновского излучения для интраскопии согласно настоящему изобретению допускает различную размерность матрицы источников рентгеновского излучения (она может быть одно-, двух- или трехмерной), различные типы сканирования (растровое или сканирование по заданным траекториям), динамическое использование различных или изменяющихся энергий, а также использование временной селекции.
На фиг.7 приведено одно из осуществлений изобретения. Одномерная матрица 1020 источников рентгеновского излучения 1022 размещена вместе с датчиками 1023 обратнорассеянного излучения с одной или нескольких сторон вдоль наиболее протяженной (обычно вертикальной) оси 1021. Все устройство 1024 целиком при необходимости может быть повернуто в перпендикулярном направлении 1025, обычно горизонтальном, для формирования построчного изображения. Альтернативный вариант заключается в повороте матрицы 1020 относительно наиболее протяженной (обычно вертикальной) оси 1021, так что луч рентгеновского излучения 1026 развертывается в перпендикулярном направлении (опять же горизонтальном), формируя построчное изображение, но без движения всего устройства целиком. Линии изображения создаются путем растрового сканирования объекта источником проникающего излучения в вертикальном направлении при включении источника 1022 на короткие промежутки времени в быстрой последовательности.
На фиг.8 представлена двумерная матрица источников проникающего излучения 1030, которая может не иметь механически движущихся частей и позволяет осуществлять обзор в рамках заранее определенного телесного угла (определяемого общим числом источников проникающего излучения 1032 и расходимостью их лучей) за очень короткое время. В конструкции возможно использование механизма растрового сканирования, аналогичного ЭЛТ, или сканирование по заданным траекториям (с использованием алгоритма Адамара или любого другого алгоритма кодировки).
Можно предложить такое осуществление настоящего изобретения, которое снабжено системой управления скорости, обозначенной на фиг.9 позицией 1040. Система предусматривает установку одного или более датчиков 1042 обратнорассеянного излучения, при этом матрица источников проникающего излучения 1044 перемещается с постоянной скоростью вперед-назад в направлении 1045 вблизи датчиков 1042 или между ними. Такие системы могут работать также в режиме попеременного включения источников, что будет описано ниже.
Дальнейшая универсальность в аналогичных исполнениях изобретения может быть достигнута за счет применения двух или более одномерных матриц источников рентгеновского излучения 1051 и 1052, установленных на цилиндре 1054, как показано на фиг.10. Поскольку матрицы источников проникающего излучения могут включаться и выключаться электронным способом с высокой скоростью, то в данном случае включена только матрица, индуцирующая луч рентгеновского излучения 1055, освещающий цель (на фиг.10 не показана), а другие матрицы отключены, так что нет необходимости экранировать одну матрицу от другой. Универсальность такого подхода определяется естественной возможностью использовать чередующиеся включения матриц в сочетании с непрерывным накоплением информации для формирования изображения. Возможен и альтернативный подход, при котором используются два цилиндра, облучающие две стороны объекта. Источники излучения в каждой матрице могут управляться контроллером для автономной активизации каждого из источников.
Чередующиеся включения источников могут быть полезны в тех случаях, когда из-за ограничений технического или конструктивного характера минимальное расстояние между источниками оказывается порядка 1 см, тогда как желаемое разрешение в ряде специальных приложений требует их расположения на расстоянии 4 мм друг от друга. На цилиндре размещаются три одномерные матрицы, отделенные друг от друга углом в 120 градусов и сдвинутые друг относительно друга в вертикальном направлении на 3,33 мм. Каждая матрица производит сканирование вдоль линий, которые разделены расстоянием в 1 см, но благодаря вертикальному сдвигу итоговое изображение после полного оборота цилиндра имеет разрешение 3,33 мм. Этот режим работы называется "черезстрочный режим". Для системы, изображенной на фиг.9, формирование изображения в черезстрочном режиме может быть осуществлено благодаря вертикальному смещению матриц при каждом горизонтальном проходе.
В соответствии со следующим осуществлением настоящего изобретения углеродные нанотрубные источники рентгеновского излучения могут быть собраны в линейные или двумерные матрицы и включаться последовательно, как описано выше. Другие автономные источники рентгеновского излучения, присутствующие в конструкции или предполагаемые к установке в будущем, могут эксплуатироваться аналогичным способом, что входит в круг задач настоящего изобретения и описано здесь и нижеприведенных пунктах формулы изобретения.
Использование матриц источников рентгеновского излучения этого типа может быть полезно в практических приложениях по следующим причинам:
Источник рентгеновского излучения может быть очень компактным, особенно в направлении вдоль линии эмиссии рентгеновских лучей.
Использование линейной матрицы источников рентгеновских лучей ощутимо уменьшает дисторсию изображений, возникающую при использовании единственного источника.
Этот подход к способу индуцирования рентгеновского излучения предоставляет такую гибкость в обработке данных при формировании изображения и определении геометрии зоны обзора, которая намного превосходит возможности современных систем, использующих единственный источник рентгеновского излучения.
За счет последовательного включения линейных матриц источников рентгеновского излучения изображение, построенное на основе обратнорассеянного излучения, не содержит искажений, связанных со взаимным воздействием источников друг на друга.
Это изобретение, применяемое в конфигурации, реализующей возможность одновременного сканирования человека с двух или более сторон, существенно повышает пропускную способность интраскопического оборудования.
Следующее осуществление изобретения представлено на фиг.11. Ряд рентгеновских источников на основе углеродных нанотруб 1110 собран в линейную матрицу 1111 или в двумерную матрицу, которая помещена сверху (как показано на фигуре) или сбоку от сканируемого персонажа 1112. Подчеркнем, что графический персонаж моделирует представительный объект исследования, но оборудование и способ исследования, представляемые здесь, могут быть применены к любому объекту, одушевленному или неодушевленному.
Датчики 1114 рассеянного излучения, которые могут быть датчиками обратнорассеянного излучения или излучения бокового рассеяния, позиционируются для перехвата рассеянных рентгеновских лучей. Сканируемый объект проходит сквозь лучи 1116 или транспортируется сквозь них с помощью таких средств, как конвейер 1118 или движущаяся лента. При необходимости оборудование может быть оснащено скобами 1119. Автономные источники проникающего излучения 1110 могут включаться последовательно для обеспечения требуемого пространственного разрешения при сканировании объекта в соответствии с известными алгоритмами обработки сигналов. Фиг.12 изображает объект 1112 в одном из положений при пересечении зоны интраскопии, которая обозначена позицией 1100. Интраскоп 1100 имеет передний источник проникающего излучения 1160 и задний источник 1162, каждый из которых может содержать линейную матрицу источников, что показано на фиг.11 позиций 1111. Каждая матрица включает в себя ряд автономных источников рентгеновского излучения, расположенных вдоль оси, перпендикулярной плоскости чертежа. Объект 1112 или идет, или транспортируется с помощью конвейера 1118 таким образом, что различные части его/ее сканируются соответствующими источниками 1160 и 1162 во время пересечения рабочей области интраскопа.
Следующее осуществление настоящего изобретения представлено на фиг.13 и 14 в конфигурации, применяемой в настоящее время в качестве металлодетекторов. Как показано на фиг.14 на виде сверху, матрицы источников проникающего излучения 1210 эмитируют рентгеновские лучи 1212, что более ясно изображено на виде спереди фиг.7. Матрица 1210 может быть сконструирована как вертикальная. В соответствии с данным осуществлением настоящего изобретения каждый источник в каждой матрице может быть включен независимо от других источников в матрице. Рентгеновские лучи 1212 попадают на объект 1112 в процессе его/ее прохода через рабочую зону интраскопа, обозначенную позицией 1200. Излучение, рассеянное объектом 1112 или предметами, которые исследуемый человек несет в руках или прячет в одежде, регистрируется датчиком 1220 рассеянного излучения. Датчик 1220 рассеянного излучения вырабатывает сигнал на основе проникающего излучения, которое он регистрирует, в дальнейшем обрабатываемый процессором 1230 для определения и идентификации опасных или запрещенных материалов и предметов в соответствии с известными алгоритмами или, в другом варианте, для демонстрации соответствующим образом обработанного изображения исследуемого объекта на дисплее монитора 1240. В обоих случаях формируется изображение, причем термин "изображение" используется здесь и пунктах формулы изобретения для обозначения упорядоченной матрицы чисел, соответствующих пространственно различимым элементам исследуемого объекта. При этом расположение минимизирует искажения и экранирование сигналов, по которым строится изображение, что благоприятно сказывается на результатах применения техники автоматического обнаружения, основанной на использовании алгоритмов распознавания формы. Тот же подход может быть применен в системах досмотра багажа при сканировании с помощью обычного пропускания или обратного рассеяния.
С другой стороны, могут использоваться и электромагнитные сканеры, такие как сканер 2104 (показанный на фиг.17) или сканеры, описанные в патенте U.S. Patent No. 6,421,420, issued July 23, 2002 and entitled "Method and Apparatus for Generating Sequential Beams of Penetrating Radiation", на который здесь приводится ссылка. Источник 2412 проникающего излучения создает луч заряженных частиц 2140, ускоряющихся до столкновения с поверхностью мишени 2160. Электромагнитная система 2418 развертки луча может иметь любую конструкцию магнитного или электростатического типа. Проникающее электромагнитное излучение эмитируется мишенью 2160 и проходит через коллиматор 2422, расположенный на определенном расстоянии от мишени, что создает параллельные лучи излучения.
В случае, если системы с бегущим лучом реализуются механическими средствами, такими как вращающиеся обоймы или обтюраторы, вышеуказанные критерии должны учитывать необходимость синхронизации движения механических элементов обтюраторов, чьи перемещения могут быть сдвинуты по фазе. Система, разработанная для таких операций, описана в патенте U.S. Patent No. 7,400,701, включенном сюда путем ссылки в полном объеме. Таким образом, например, для управления поворотом коллиматора могут использоваться контроллеры замкнутого цикла, хорошо известные в технике, что позволяет с помощью поворота коллиматора задавать трассу рентгеновского излучения 2023. Замкнутый цикл контролируется путем выставления апертуры обтюратора (полного угла развертки луча, т.е. угла между крайними положениями луча 2023 и 2024 от одного источника), что равно 2π замкнутого цикла. В устройствах, в которых эмиссия излучения контролируется электронным образом, может использоваться любая последовательность включений и уровень развертки, без ограничений, а управление системой может осуществляться полностью программно.
Благодаря преимуществам работы в чрезстрочном режиме, который снижает или устраняет взаимное влияние сигналов друг на друга, источники проникающего излучения могут быть размещены компактнее, чем возможно в иных случаях. В частности, источники 2013, 2015 и 2017 могут быть размещены на одной плоскости, что фактически позволяет организовать одновременное управление включением/выключением всех источников излучения независимо от скорости, с которой объект пересекает интраскоп. Описанная система позволяет успешно формировать изображения на основе сигналов от последовательно расположенных источников 2013, 2015 и 2017, эмитирующих лучи 2023-2028. Фиг.15 показывает типичное устройство из трех источников 2010 с лучами 2023, 2025 и т.д., траектории и развертки которых лежат в одной плоскости.
Лучи от каждого блока формирования изображения разворачиваются последовательно, так что в любой момент времени существует не более одного луча излучения. Таким образом, источник 2013 проникающего излучения разворачивает свой луч первым. Излучение, отраженное от объекта, что показано лучом 2044, регистрируется всеми датчиками 2031-2036, сигналы с которых передаются в процессор 2040 для получения изображения объекта, который может транспортироваться через систему конвейером 2029 - возможным, но необязательным элементом конструкции. Сигналы от каждого датчика обрабатываются системой распознавания независимо друг от друга (для каждого сигнала выделяется свой электрический канал). Этот процесс повторяется для каждого из трех блоков формирования изображения, в результате чего создаются кадры объекта при его движении через интраскоп.
Так, на фиг.16 показан вид сбоку устройства, элементы которого обозначены соответствующими позициями. Показана щель 2050, через которую луч излучения от источника 2013 проходит сквозь сегменты 2052 и 2054 датчика 2031 при сканировании объекта 2018, движущегося в поперечном направлении 2016.
Сигналы с датчиков могут использоваться для формирования изображений селективно. Поскольку отраженные фотоны 2044, регистрируемые датчиками 2033 и 2034 от источника 2013, столь же полезны, как и отраженные фотоны от источника 2017, то одни и те же датчики могут использоваться для регистрации сигналов от всех источников, что повышает качество собираемых данных и повышает эффективность использования аппаратного оборудования датчиков.
Различные осуществления настоящего изобретения могут позволить успешно применять технику формирования множественных изображений на основе рассеянного рентгеновского излучения, индуцированного бегущим лучом, в небольших рабочих пространствах при подавлении влияния сигналов друг на друга и при близком пространственном расположении блоков формирования изображения. Близкое пространственное расположение блоков формирования изображения (термин "блок формирования изображения" обозначает здесь источник проникающего излучения, по меньшей мере один датчик, связанные с ними электронное оборудование и включает программную обработку сигнала) позволяет также регистрировать рассеянное излучение от одного источника несколькими датчиками, что увеличивает объем данных от рассеянного сигнала, повышает качество изображений и позволяет эффективно использовать датчики.
В тех случаях, когда желательно проводить сканирование отдельных областей исследуемого объекта, компланарное размещение блоков формирования изображений допускает одновременный контроль включений/выключений источников рентгеновского излучения независимо от скорости, с которой объект перемещается относительно блоков формирования изображений. Это значительно упрощает организацию управления рентгеновским излучением от каждого блока формирования изображений в многосторонних интраскопах, что делает ненужными индивидуальные последовательности рентгеновских излучений, которые обычно используются в системах с некомпланарной эмиссией.
Описанные осуществления изобретения представлены здесь только как примеры. Специалисту в данной области техники очевидны многочисленные варианты и модификации предлагаемой конструкции. Все эти варианты и модификации входят в общее определение данного изобретения, что и отражено в прилагаемых пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕНЕРАЦИИ ИЗОБРАЖЕНИЯ ОБЪЕКТА, СИСТЕМА КОНТРОЛЯ ДЛЯ ПРОВЕРКИ ОБЪЕКТОВ И СПОСОБ ПРОВЕРКИ ОБЪЕКТА | 2007 |
|
RU2411506C2 |
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| СПОСОБЫ ВЫПОЛНЕНИЯ ОБСЛЕДОВАНИЯ ОБРАТНОГО РАССЕЯНИЯ СЛОЖНЫХ ЦЕЛЕЙ В ОГРАНИЧЕННЫХ ПРОСТРАНСТВАХ | 2012 |
|
RU2595291C2 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ДОСМОТРА ЛЮДЕЙ | 2008 |
|
RU2523771C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДОСМОТРА ОБЪЕКТА | 2006 |
|
RU2418291C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ОБЪЕКТА ПРОВЕРКИ | 2003 |
|
RU2334219C2 |
| СИСТЕМА ОБРАТНОГО РАССЕЯНИЯ С ИЗМЕНЯЕМЫМ РАЗМЕРОМ МАТРИЦЫ ДАТЧИКОВ | 2012 |
|
RU2589394C2 |
| СИСТЕМА КОНТРОЛЯ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2448342C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОБЪЕКТА | 2007 |
|
RU2428680C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА И СТРУКТУРЫ НЕОДНОРОДНОГО ОБЪЕКТА (ВАРИАНТЫ) | 1997 |
|
RU2119660C1 |












Использование: для рентгеноскопического досмотра людей. Сущность: заключается в том, что устройство определения характеристик материала исследуемого объекта включает первую и вторую каретки, каждая из которых содержит источник проникающего рентгеновского излучения, имеющий коллиматор формирования остронаправленного на исследуемый объект луча, по меньшей мере один двигатель, установленный с возможностью перемещения каждой каретки относительно исследуемого объекта, так чтобы перемещать остронаправленный луч относительно объекта в направлении, имеющем вертикальную составляющую, и по меньшей мере один датчик для регистрации излучения, обратнорассеянного от исследуемого объекта и формируемого по меньшей мере одним из источников излучения. Технический результат: обеспечение возможности создания системы сканирования, сочетающей высокое качество сформированных изображений с высокой производительностью. 2 н. и 14 з.п. ф-лы, 17 ил.
1. Устройство определения характеристик материала исследуемого объекта, включающее первую и вторую каретки, каждая из которых содержит источник проникающего рентгеновского излучения, имеющий коллиматор формирования остронаправленного на исследуемый объект луча, по меньшей мере один двигатель, установленный с возможностью перемещения каждой каретки относительно исследуемого объекта, так чтобы перемещать остронаправленный луч относительно объекта в направлении, имеющем вертикальную составляющую, и по меньшей мере один датчик для регистрации излучения, обратнорассеянного от исследуемого объекта и формируемого по меньшей мере одним из источников излучения.
2. Устройство по п.1, в котором по меньшей мере один двигатель установлен с возможностью синхронного перемещения каждой из кареток в направлении, имеющем вертикальную составляющую.
3. Устройство по п.1, в котором первая каретка содержит первый датчик.
4. Устройство по п.3, в котором вторая каретка содержит второй датчик.
5. Устройство по п.1, в котором первая и вторая каретки снабжены первым и вторым сканерами соответственно, каждый из которых связан с соответствующими источниками излучения и установлен с возможностью перемещения остронаправленных лучей проникающего излучения, индуцированных соответствующими источниками, перпендикулярно направлению движения каретки, на которой расположен соответствующий источник излучения.
6. Устройство по п.5, в котором сканеры выполнены с возможностью формирования чередующихся лучей.
7. Устройство по п.1, в котором источники излучения, установленные на первой и второй каретках, выполнены с возможностью индуцирования преимущественно противоположно направленных лучей проникающего излучения.
8. Устройство по п.1, в котором каждый источник излучения является импульсным.
9. Устройство по п.1, которое дополнительно включает процессор, выполненный с возможностью приема от по меньшей мере одного датчика сигнала и формирования изображения посредством по меньшей мере указанного сигнала.
10. Способ досмотра объекта, включающий перемещение первой каретки с установленным на ней первым источником излучения и коллиматором, индуцирующим остронаправленный луч проникающего излучения, направленный на исследуемый объект, при котором осуществляют сканирование первым лучом проникающего излучения в направлении, имеющем вертикальную составляющую, перемещение второй каретки с установленным на ней вторым источником излучения и коллиматором, индуцирующим остронаправленный луч проникающего излучения, направленный на исследуемый объект, при котором осуществляют сканирование вторым лучом проникающего излучения в направлении, имеющем вертикальную составляющую, регистрацию по меньшей мере одним датчиком излучения, обратнорассеянного от объекта, подачу датчиком выходных сигналов на основе излучения, регистрируемого по меньшей мере одним датчиком, и получение характеристики исследуемого объекта посредством выходного сигнала.
11. Способ по п.10, в котором первую и вторую каретки перемещают синхронно.
12. Способ по п.10, в котором по меньшей мере первый датчик из числа по меньшей мере одного датчика установлен на первой каретке.
13. Способ по п.12, в котором по меньшей мере второй датчик из числа по меньшей мере одного датчика установлен на второй каретке.
14. Способ по п.10, который дополнительно включает перемещение первой и второй кареток в соответствующих направлениях, причем каждое из них имеет вертикальную составляющую.
15. Способ по п.10, который дополнительно включает формирование изображений посредством излучений, регистрируемых по меньшей мере одним датчиком.
16. Способ по п.10, который дополнительно включает сканирование лучом проникающего излучения, индуцированным вторым источником излучения, установленным на второй каретке, в направлении, перпендикулярном направлению движения кареток, подачу датчиком выходных сигналов посредством излучения, регистрируемого по меньшей мере одним датчиком, и формирование изображения посредством излучения, регистрируемого от первого и второго лучей.
| US 6421420 В1, 16.07.2002 | |||
| Автоматическая линия для изготовления стеклянных изделий из мерных трубок | 1984 |
|
SU1168249A1 |
| US 6151381 А, 21.11.2000 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДМЕТОВ В ВЕРХНИХ СЛОЯХ ГРУНТА, В ЧАСТНОСТИ ПРОТИВОПЕХОТНЫХ МИН | 2002 |
|
RU2225018C2 |
| РУДОКОНТРОЛИРУЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2158917C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АЛМАЗОВ НА КОНВЕЙЕРЕ, В ПОТОКЕ ИЛИ ОБРАЗЦЕ АЛМАЗОНОСНОЙ ПОРОДЫ | 2000 |
|
RU2193185C2 |

