Область техники
Настоящее изобретение относится к устройству для подводного обнаружения, например к устройству для подводного обнаружения присутствия пузырьков, поднимающихся от подводных сооружений и участков морского дна. Кроме того, настоящее изобретение касается способов использования указанного устройства для обнаружения присутствия пузырьков. Изобретение также относится к программным продуктам, записанным на машиночитаемом носителе и сконфигурированным для исполнения на вычислительном оборудовании для осуществления указанных способов.
Предпосылки к созданию изобретения
Хорошо известно, что в жидкостях возникают пузырьки. Кроме того, хорошо известно, что пузырьки возникают естественным образом в покрытых водой участках, например в болотах и лагунах, в результате разложения органической растительности с выделением газа метана. Вероятно, менее очевидным является то, что пузырьки также образуются естественным образом в океанских средах, но они не заметны из-за кажущегося хаотическим волнового движения поверхности океана. В океанских средах образование пузырьков может указывать на разнообразные процессы, происходящие под морским дном, например на геологические трещины вдоль линий тектонических изломов, на геологические процессы, такие как горячие источники и т.п.
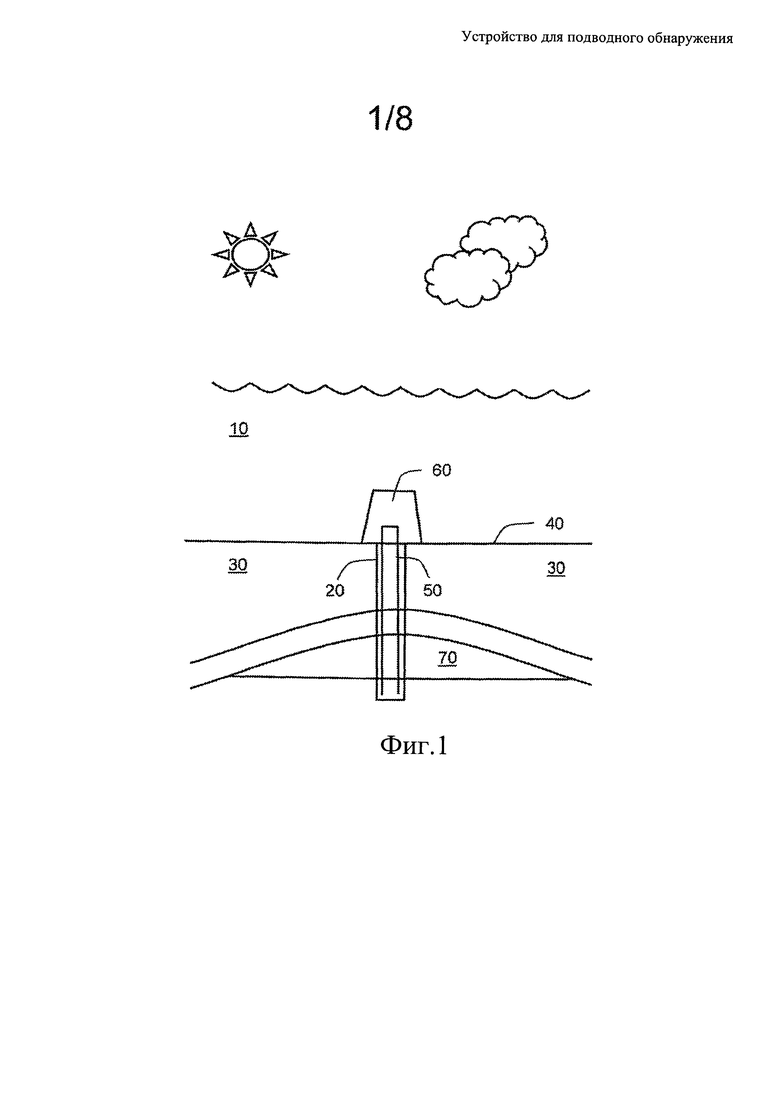
Когда выполняется морское бурение для добычи газа и/или нефти в океанской среде 10, как показано на фиг. 1, скважина 20 бурится вглубь геологической формации 30, имеющей верхнюю поверхность, которая формирует морское дно 40. Обычной практикой является установка в скважине 20 стальной обсадной трубы 50. В глубоководных установках стандартной практикой также является накрытие обсадной трубы 50 у морского дна клапанным механизмом 60. Клапанный механизм 60 часто называют «елкой» из-за внешнего сходства с формой сужающегося вверх конуса хвойного дерева. Геологическая формация 30, пространственно примыкающая к скважине 20, часто по своей природе является пористой и неспособна выдерживать высокие давления, возникающие в обсадной трубе 50, особенно когда запасы 70 нефти и/или газа, пересекаемые скважиной 20, находятся на начальной стадии разработки при высоком внутреннем давлении. На более поздних стадиях разработки запасов нефти и/или газа часто необходимо вводить жидкость в запасы 70 нефти и/или газа при значительном давлении, что приводит к высокому внутреннему давлению в обсадной трубе 50. Клапанный механизм 60 позволяет присоединять гибкие трубы к обсадной трубе 50, например, при использовании плавучей платформы для добычи нефти и/или газа.
Как показал опыт аварии на платформе «Deep Water Horizon» в Мексиканском заливе в 2010 году, обсадная труба 50 может дать течь или даже трещину. Такая трещина может возникнуть вследствие производственных дефектов в материале, используемом для изготовления обсадной трубы 50, или может возникнуть из-за того, что обсадная труба 50 подвергается давлению, превышающему расчетные значения (например, труба подвергается избыточному давлению для получения более высоких объемов добычи запасов 70 нефти и/или газа) в процессе работы. Когда обсадная труба 50 разрушается, жидкость из скважины 20 течет в соседние зоны геологической формации 30, что часто приводит к потере давления внутри скважины 20. Со временем жидкость из трещины в обсадной трубе 50 проникает в морское дно 40 и проявляется в виде возникновения случайных пузырьков над обширной областью морского дна 40. В связи с тем, что оптическая видимость у поверхности морского дна 40 часто затруднена наличием твердых частиц, особенно в процессе операций, вызывающих возмущение отложений на морском дне 40, упомянутые случайные пузырьки иногда трудно обнаружить, используя традиционные способы. Известно, что сырая нефть выделяет пузырьки газа при уменьшении давления, и такой выделяемый газ, создаваемый внутри геологической формации 30 около скважины 20, потенциально может вызвать возмущение твердых частиц на морском дне 40, затрудняющее оптическое обнаружение.
Подобные рассуждения также относятся к подводным трубопроводам для нефти и/или газа, в которых после многих лет эксплуатации могут образоваться случайные дефекты, например «точечные отверстия», через которые может происходить утечка газа. Желательно обнаружить маленькие утечки и устранить их до того, как они превратятся в большие утечки и нанесут значительный урон окружающей среде. Однако в ситуации, подобной показанной на фиг. 1, обнаружение случайных утечек над обширной областью морского дна 40 в условиях затрудненной оптической видимости представляет собой потенциально трудную техническую задачу, которую необходимо решить.
Таким образом, имеется необходимость в надежном устройстве, которое способно работать в океанических средах 10 и обнаруживать пузырьки, выделяющиеся из обширной области морского дна 40 при одновременном наличии частиц, затрудняющих оптическое обнаружение.
В документе US 2003/0056568 А1 описан способ обнаружения морского газопроявления с помощью локального датчика на морском дне, создания пузырьков в воде около датчика, обнаружения пузырьков, оценки концентрации растворенного газа в воде и сравнения с близлежащим морским газопроявлением.
В документе GB 2176604 А описано акустическое обнаружение утечек газа путем использования пассивной и активной гидроакустической системы обнаружения, установленной снаружи трубопровода.
Сущность изобретения
Настоящее изобретение направлено на создание улучшенного устройства, выполненного с возможностью сбора и надежного обнаружения одного или более пузырьков в водной среде.
В соответствии с первым аспектом настоящего изобретения предлагается устройство для подводного обнаружения, как указано в пункте 1 прилагаемой формулы изобретения: предлагается устройство для подводного обнаружения присутствия одного или более пузырьков в водной среде, отличающееся тем, что оно содержит первую конструкцию, имеющую нижний внешний край для задания области, в пределах которой упомянутое устройство обладает возможностью сбора одного или более пузырьков, вторую конструкцию для обеспечения пространственной концентрации в зоне обнаружения одного или более пузырьков, принятых в пределах указанной области, заданной нижним внешним краем, и блок обнаружения для обнаружения одного или более пузырьков, сконцентрированных при работе устройства с помощью конструкции для обеспечения концентрации пузырьков, проходящих в зону обнаружения, и для формирования выходного сигнала (S2), указывающего на прохождение одного или более пузырьков через зону обнаружения.
Преимуществом изобретения является то, что устройство для подводного обнаружения обладает возможностью сбора одного или более пузырьков над потенциально обширной областью в водной среде и с возможностью надежного обнаружения пузырьков при наличии мешающих частиц в водной среде.
Опционально, устройство выполнено с возможностью обнаружения одного или более пузырьков газа и/или одного или более пузырьков нефти. Термин «нефть» в настоящем документе включает широкий диапазон жидких углеводородов.
Опционально, в устройстве для подводного обнаружения вторая конструкция выполнена в виде по существу усеченного конуса для пространственного ограничения объема, в котором при работе устройства концентрируются один или более пузырьков.
Опционально, в устройстве для подводного обнаружения блок обнаружения содержит один или более датчиков для пассивного обнаружения звуков, создаваемых одним или более пузырьками, проходящими при работе устройства через зону обнаружения, для формирования сигнала (S1) обнаружения, и блок обработки сигналов для обработки сигнала (S1) обнаружения и формирования выходного сигнала (S2), указывающего на присутствие и/или отсутствие одного или более пузырьков в зоне обнаружения.
Опционально, в устройстве для подводного обнаружения блок обнаружения содержит источник сигнала для зондирования при работе устройства зоны обнаружения с использованием зондирующего излучения, и один или более датчиков для обнаружения одного или более пузырьков, присутствующих в зоне обнаружения, посредством переданных и/или отраженных порций зондирующего излучения. Опционально, в устройстве для подводного обнаружения источник сигнала и один или более датчиков блока обнаружения размещены в одном общем блоке. Опционально, источник сигнала для формирования зондирующего излучения регулируется по частоте и/или амплитуде для возбуждения нелинейного резонанса в одном или более пузырьках, а выходной сигнал (S2), указывающий на присутствие одного или более пузырьков в зоне обнаружения, формируется блоком обнаружения на основе гармонических составляющих сигнала, образованных в результате возбуждения нелинейного резонанса в одном или более пузырьках.
Опционально, блок обнаружения содержит блок обработки сигналов для измерения времени прохождения зондирующего излучения через зону обнаружения и/или акустического импеданса зоны обнаружения для определения присутствия одного или более пузырьков, поднимающихся в зоне обнаружения.
Опционально, устройство также содержит блок для периодического прерывания при работе устройства подачи собранных пузырьков из конструкции для обеспечения концентрации пузырьков в зону обнаружения для предоставления возможности различения устройством сигналов от блока обнаружения, указывающих на присутствие пузырьков в зоне обнаружения, и сигналов, указывающих на отсутствие пузырьков в зоне обнаружения. Опционально, в устройстве для подводного обнаружения блок для периодического прерывания при работе устройства подачи собранных пузырьков из конструкции для обеспечения концентрации пузырьков в зону обнаружения содержит по меньшей мере одно из следующего:
(i) управляемый клапан, пространственно расположенный при работе ниже блока обнаружения, и
(ii) управляемый блок сбора пузырьков, выполненный с возможностью периодического выпуска одного или более собранных пузырьков из данного блока в зону обнаружения.
Опционально, в устройстве для подводного обнаружения зона обнаружения также содержит в отношении зоны обнаружения датчик температуры и датчик давления для обеспечения возможности определения блоком обработки сигналов размеров одного или более пузырьков на основе их измеренных частот нелинейного резонанса.
Опционально, устройство выполнено с возможностью установки на дистанционно управляемом транспортном средстве (remotely operated vehicle, ROV) для проведения работы.
Опционально, в устройстве для подводного обнаружения зона обнаружения снабжена газоанализатором для анализа химического состава одного или более пузырьков, проходящих при работе устройства через зону обнаружения.
Опционально, в устройстве для подводного обнаружения блок обработки сигналов выполнен с возможностью возбуждения блока обнаружения на частоте в диапазоне от 1 кГц до 10 МГц, предпочтительнее в диапазоне от 10 кГц до 5 МГц и наиболее предпочтительно в диапазоне от 100 кГц до 1 МГц.
В соответствии со вторым аспектом изобретения предлагается способ применения устройства для подводного обнаружения для обнаружения присутствия одного или более пузырьков в водной среде, отличающийся тем, что он включает:
(a) использование первой конструкции, имеющей нижний внешний край, для задания области сбора одного или более пузырьков для упомянутого устройства;
(b) использование второй конструкции для обеспечения пространственной концентрации в зоне обнаружения одного или более пузырьков, принимаемых в пределах области, заданной нижним внешним краем, и
(c) использование блока обнаружения для обнаружения одного или более пузырьков, сконцентрированных при работе устройства с помощью второй конструкции в зоне обнаружения, и для формирования выходного сигнала (S2), указывающего на прохождение одного или более пузырьков через зону обнаружения.
Опционально, способ включает выполнение второй конструкции в виде по существу усеченного конуса для пространственного ограничения объема, в котором при работе устройства концентрируются один или более пузырьков.
Опционально, способ включает использование одного или более датчиков в блоке обнаружения для пассивного обнаружения звуков, производимых одним или более пузырьками, проходящими при работе устройства через зону обнаружения, для формирования сигнала (S1) обнаружения и применение блока обработки сигналов для обработки сигнала (S1) обнаружения для формирования выходного сигнала, указывающего на присутствие и/или отсутствие одного или более пузырьков в пределах зоны обнаружения.
Опционально, способ включает использование источника сигнала блока обнаружения для зондирования при работе устройства зоны обнаружения с использованием зондирующего излучения и использование одного или более датчиков для обнаружения одного или более пузырьков, присутствующих в зоне обнаружения, посредством переданных и/или отраженных порций зондирующего излучения. Опционально, способ включает регулирование источника сигнала по частоте и/или амплитуде для формирования зондирующего излучения для возбуждения нелинейного резонанса в одном или более пузырьках и формирования выходного сигнала, указывающего на присутствие одного или более пузырьков в зоне обнаружения, на основе гармонических составляющих сигнала, образованных в результате возбуждения нелинейного резонанса в одном или более пузырьках.
Опционально, способ также включает использование блока для периодического прерывания при работе устройства подачи собранных пузырьков из конструкции для обеспечения концентрации пузырьков в зону обнаружения для предоставления возможности различения устройством сигналов из блока обнаружения, указывающих на присутствие пузырьков в зоне обнаружения, и сигналов, указывающих на отсутствие пузырьков в зоне обнаружения. Опционально, способ включает использование блока для периодического прерывания при работе устройства подачи собранных пузырьков из конструкции для обеспечения концентрации пузырьков в зону обнаружения с применением по меньшей мере одного из следующего:
(i) управляемый клапан, пространственно расположенный при работе ниже блока обнаружения, и
(ii) управляемый блок сбора пузырьков, выполненный с возможностью периодического выпуска одного или более собранных пузырьков из данного блока в зону обнаружения.
Опционально, способ включает использование в отношении зоны обнаружения датчика температуры и датчика давления для обеспечения возможности определения блоком обработки сигналов размеров одного или более пузырьков на основе их измеренных частот нелинейного резонанса.
Опционально, способ включает выполнение устройства с возможностью установки на дистанционно управляемом транспортном средстве (ROV) для проведения работы.
Опционально, способ включает снабжение зоны обнаружения газоанализатором для анализа химического состава одного или более пузырьков, проходящих в процессы работы через зону обнаружения.
Опционально, способ включает управление блоком обработки сигналов для возбуждения блока обнаружения на частоте в диапазоне от 1 кГц до 10 МГц, предпочтительнее в диапазоне от 10 кГц до 5 МГц и наиболее предпочтительно в диапазоне от 100 кГц до 1 МГц.
В соответствии с третьим аспектом предлагается программный продукт, записанный на машиночитаемом носителе, отличающийся тем, что программный продукт исполняется на вычислительном оборудовании для осуществления способа в соответствии со вторым аспектом изобретения.
Следует понимать, что признаки изобретения могут быть объединены в различные комбинации в пределах объема изобретения, определяемого приложенной формулой изобретения.
Краткое описание чертежей
Далее будут описаны варианты осуществления настоящего изобретения, приводимые только в качестве примера, со ссылкой на приложенные чертежи.
Фиг. 1 иллюстрирует водную среду, в которой могут использоваться варианты осуществления настоящего изобретения.
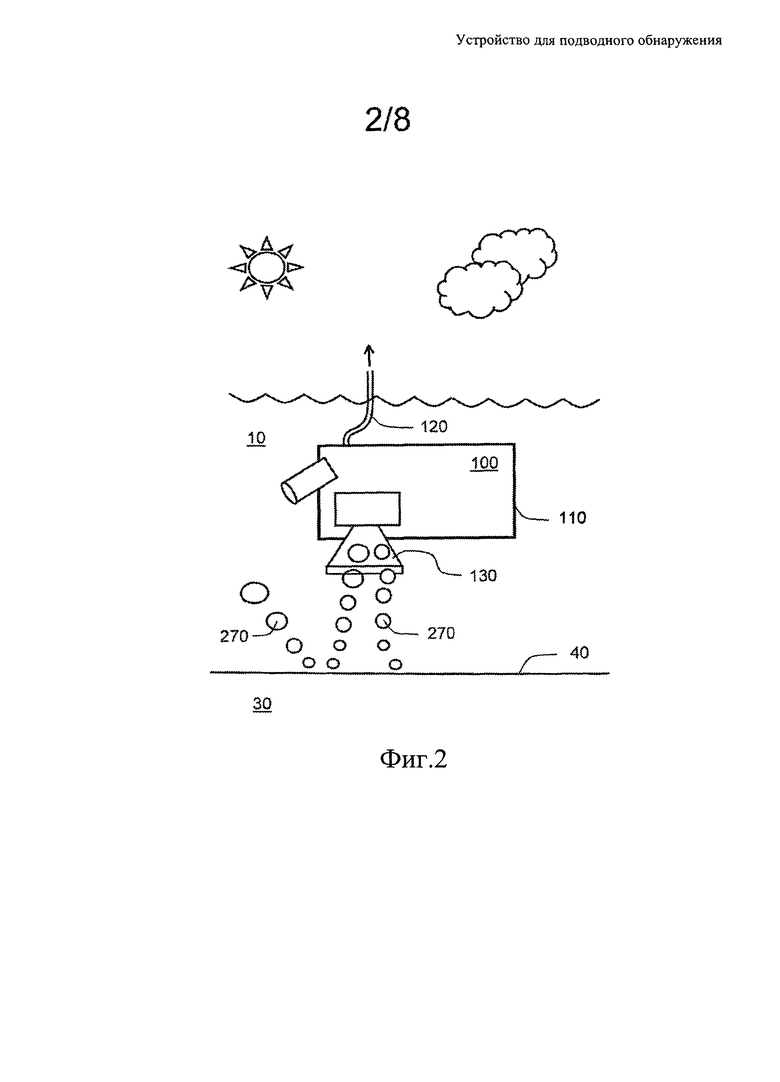
Фиг. 2 иллюстрирует пример осуществления устройства в соответствии с настоящим изобретением.
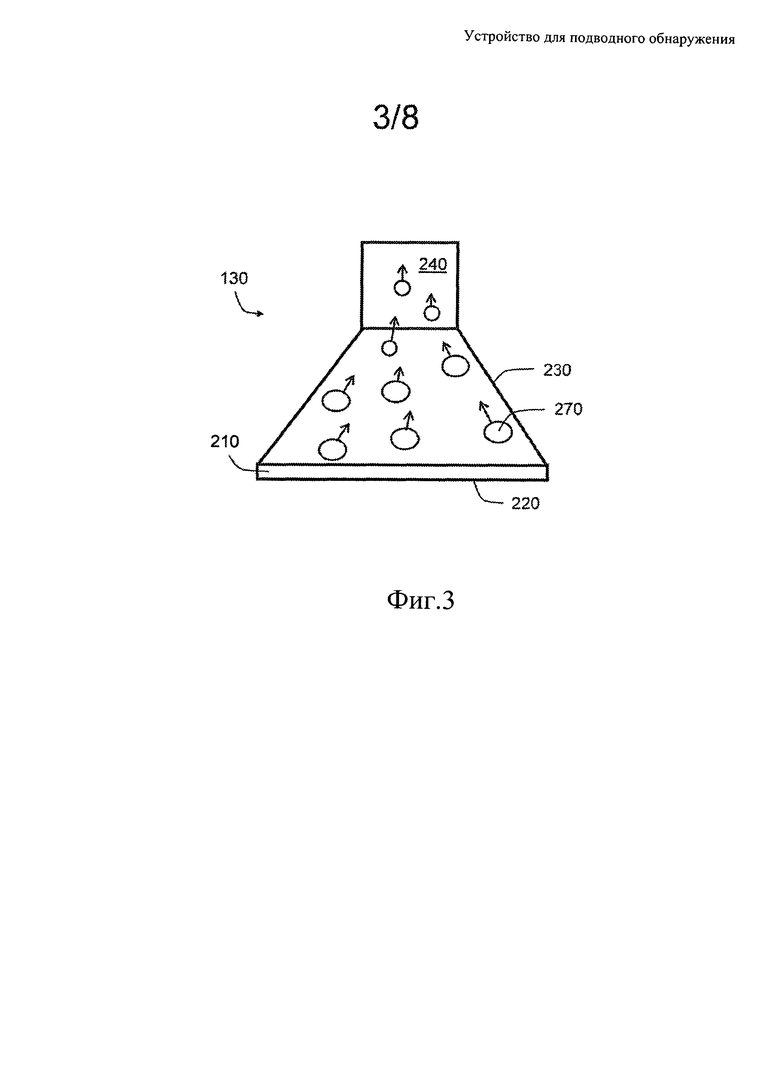
Фиг. 3 иллюстрирует сенсорное устройство для использования в устройстве, показанном на фиг. 2.
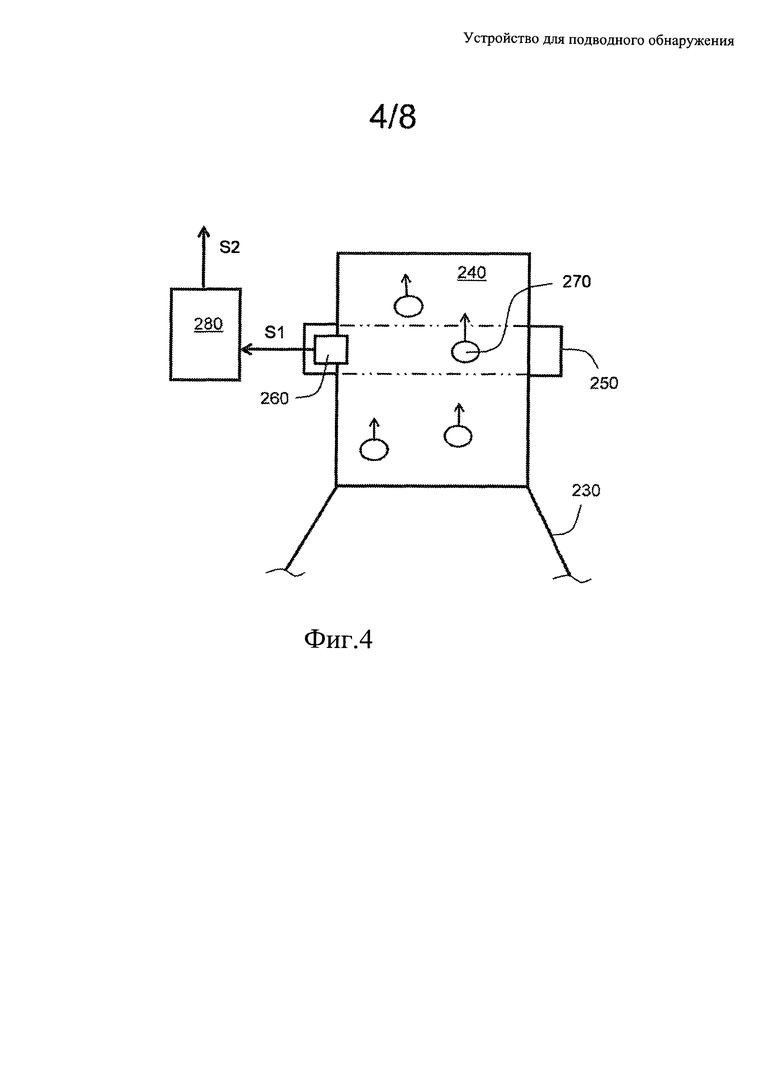
Фиг. 4 иллюстрирует альтернативное сенсорное устройство для использования в устройстве, показанном на фиг. 2.
Фиг. 5 иллюстрирует зону горловины устройства, показанного на фиг. 2.
Фиг 6 иллюстрирует опциональную конфигурацию сенсорного устройства, в котором один или более акустических преобразователей выполнены с возможностью испускания акустического излучения в зону горловины, через которую протекает жидкость, например, потенциально содержащая один или более пузырьков.
Фиг. 7 иллюстрирует круговое расположение преобразователей, используемых для сенсорного устройства в устройстве, показанном на фиг. 2.
Фиг. 8 иллюстрирует устройство, показанное на фиг. 2, вместе с водным судном для транспортировки устройства к местоположению для его использования.
На приложенных чертежах подчеркнутое число используется для обозначения элемента, над которым подчеркнутое число расположено, или элемента, к которому подчеркнутое число примыкает. Неподчеркнутое число относится к элементу, идентифицированному с помощью линии, связывающей неподчеркнутое число с данным элементом. Если число является неподчеркнутым и сопровождается соответствующей стрелкой, неподчеркнутое число используется для идентификации общего элемента, на который эта стрелка указывает.
Подробное описание изобретения
Известно ультразвуковое обнаружение пузырьков, которое обеспечивает преимущества обнаружения пузырьков, даже при одновременном присутствии твердых частиц, затрудняющих оптическое обнаружение. Пузырек в жидкости, как правило, будет содержать смесь неконденсирующегося газа и пара и будет оставаться приблизительно стабильным во временном масштабе, когда можно пренебречь растворимостью и плавучестью, если парциальное давление газового компонента пузырька уравновешивает сжимающие давления, вызванные поверхностным натяжением и давлением жидкости, окружающей пузырек. Приложенное акустическое поле, а именно ультразвуковое излучение, может вызвать нелинейное колебание пузырька, что при малых амплитудах примерно соответствует движению осциллятора с одной степенью свободы.
Пузырек, таким образом, способен колебаться с собственной резонансной частотой v0, определенной уравнением 1 (1):

где ρ - плотность морской воды, в которой присутствует пузырек;
p0 - статическое давление внутри пузырька;
σ - поверхностное натяжение морской воды;
k - показатель политропы и
R0 - радиус пузырька.
Ранее проведенные исследования показали, что резонансные характеристики пузырьков могут быть использованы для характеристики пузырьков посредством возбуждения их резонансного колебательного движения. Когда движение пузырька соответствует нелинейному осциллятору, что достигается, например, использованием высоких интенсивностей акустического зондирования, то пузырек может приводить к умножению частоты; например, пузырек подвергается акустическому излучению на его резонансной частоте v0, определенной уравнением 1 (1), с амплитудой, которая вызывает нелинейное колебание этого пузырька, вызывая излучение пузырька, имеющее вторую гармоническую составляющую на частоте 2v0. Более того, ранее проведенные исследования также показали, что использование для пузырьков в водной среде 10 сигналов, которые имеют акустические частоты до 200 кГц, обеспечивает получение измеримых результатов, хотя были также использованы и более высокие частоты, например, выше частотного диапазона от 100 кГц до 1 МГц. Вода сама по себе может рассматриваться как несжимаемая среда, а значит, неспособна иметь такие резонансы; подобным образом твердые частицы, присутствующие в воде, не способны показывать такой нелинейный резонанс.
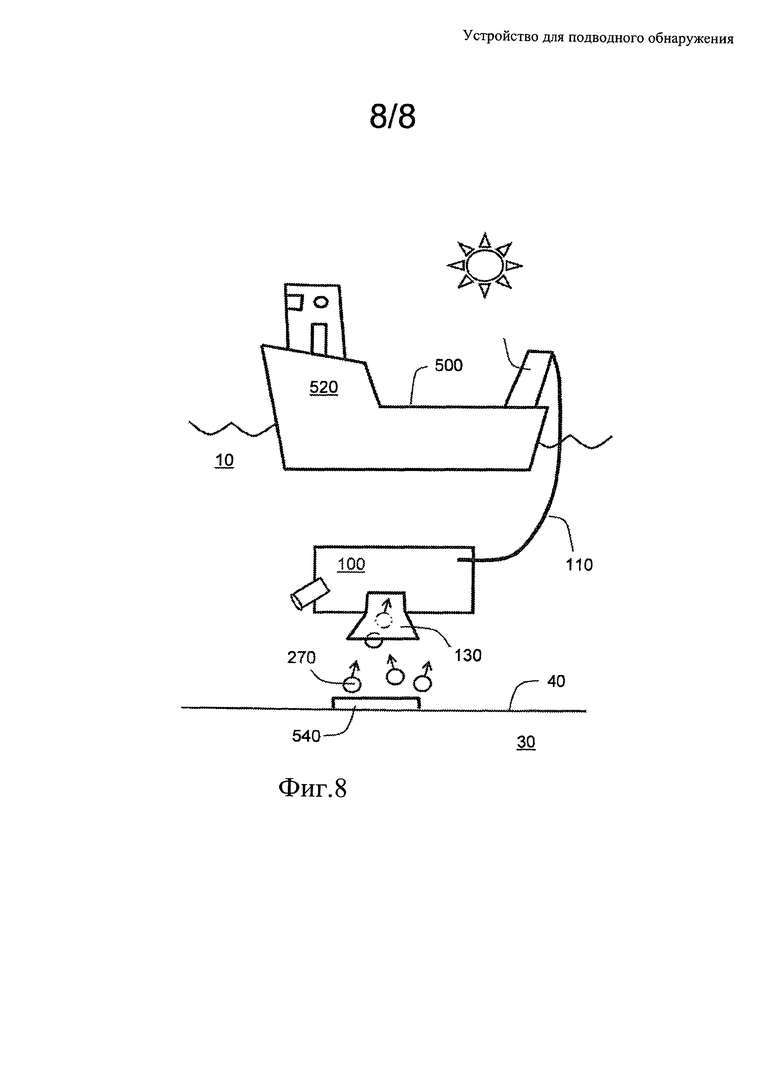
Настоящее изобретение касается устройства для подводного обнаружения одного или более пузырьков, поднимающихся от обширной области морского дна 40 или от обширной области погруженной конструкции, например от донного газопровода или электрического кабеля. Устройство обозначено в общем цифрой 100 на фиг. 2 и содержит основную часть 110, составное соединение 120 для связи с водной поверхностью и сенсорное устройство 130. Устройством 100 можно управлять в водной среде 10, например в океанской среде, посредством водных движителей, двигателей и/или движимых лопастей. Предпочтительно, сенсорное устройство 130 содержит одну или более камер для исследования окрестного пространства устройства 100, например, для поддержки маневрирования устройства 100 в процессе его работы.
Сенсорное устройство 130 также включает сенсорное устройство 200, как показано на фиг. 3. Сенсорное устройство 200 содержит первую конструкцию 210 для сбора одного или более пузырьков, например, выполненную в виде по существу воронкообразного усеченного конуса, имеющего нижний внешний край 220, вторую конструкцию 230, выполненную в форме в общем направленного вверх конуса для обеспечения пространственной концентрации одного или более пузырьков, принимаемых в области сбора пузырьков, заданной нижним внешним краем 220, и зону 240 горловины для приема одного или более пузырьков, сконцентрированных во второй конструкции 230; зона 240 горловины также называется «зоной обнаружения». Предпочтительно, зона 240 горловины имеет эффективную площадь поперечного сечения, которая меньше площади сбора пузырьков, заданной нижним внешним краем 220. Зона 240 горловины содержит блок 250 преобразователей для обнаружения при работе устройства одного или более пузырьков, собранных в пределах зоны 230 концентрации пузырьков и поднимающихся в зону 240 горловины за счет их собственной плавучести и/или с помощью вынужденного потока жидкости, создаваемого турбиной или подобным устройством. Опционально, вторая конструкция 230 выполнена по существу в форме усеченного конуса, как упомянуто выше, хотя при осуществлении настоящего изобретения возможно использование других форм зоны 230, например, ассиметричных направленных вверх конусов криволинейной и/или прямолинейной формы.
Как показано на фиг. 4, блок 250 преобразователей опционально содержит по меньшей мере один акустический датчик, который в самой простой форме выполнен в виде гидрофона 260 для прослушивания движения одного или более собранных пузырьков 270 через зону 240 горловины и формирования соответствующего сигнала S1 датчика. Устройство 100 содержит блок 280 обработки сигналов для обработки сигнала S1 для формирования выходного сигнала S2, указывающего на один или более собранных пузырьков 270. Опционально, блок 280 обработки сигналов выполнен с возможностью фильтрации сигнала S1 по частоте с последующим проведением анализа амплитуды и частоты составляющих сигнала, присутствующих в отфильтрованном сигнале S1 для формирования выходного сигнала S2, например, путем выполнения спектрального анализа Фурье и/или сравнительного анализа с заранее заданными шаблонами сигнала. Предпочтительно, применяется нейросетевой анализ отфильтрованного сигнала S1 для идентификации присутствия одного или более пузырьков 270. Опционально, блок 280 обработки сигналов реализован с использованием вычислительного оборудования, выполненного с возможностью исполнения одного или более программных продуктов, записанных на машиночитаемом носителе; программные продукты опционально выполнены с возможностью использования цифровых рекурсивных фильтров, частотные диапазоны которых являются динамически модифицируемыми для поиска указанных составляющих в сигнале S1 в различных частотных диапазонах, например от 10 Гц до 100 Гц, от 100 Гц до 1 кГц и т.д. Другими словами, блок 250 преобразователей в таком случае используется для пассивного прослушивания звуков образования пузырьков, возникающих в зоне 240 горловины, и затем анализа этих звуков, а именно сигнала S1, для подтверждения с высокой достоверностью, производят ли эти звуки один или более пузырьков 270.
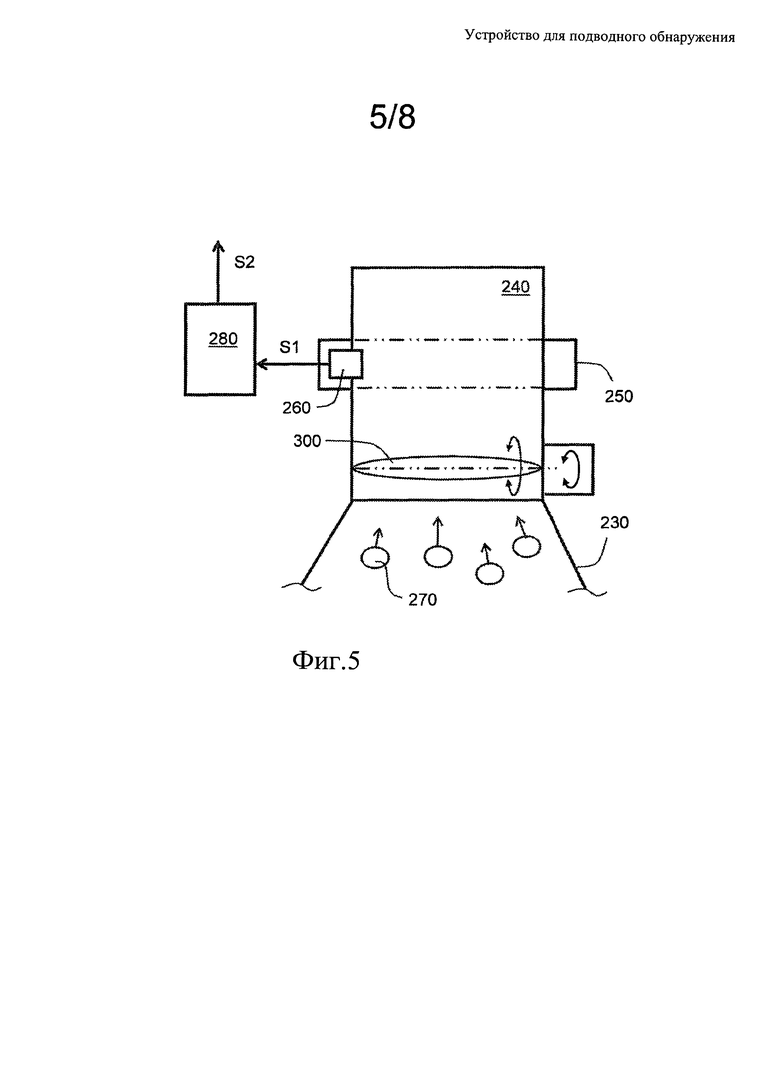
Как показано на фиг. 5, зона 240 горловины предпочтительно снабжена клапаном 300, пространственно расположенным ниже блока 250 преобразователей, например, ниже гидрофона 260. Опционально, клапан 300 выполнен в виде управляемого дроссельного клапана, хотя могут опционально использоваться другие типы управляемых клапанов, например:
(i) линейно-управляемые игольчатые клапаны и золотниковые клапаны и/или
(ii) одно или более наполняемых жидкостью тел для воспрепятствования в наполненном состоянии потоку пузырьков и для обеспечения в пустом состоянии возможности движения пузырьков 270 в зону 240 горловины.
Клапан 300 предназначен для сбора одного или более пузырьков 270, которые затем периодически выпускаются для их обнаружения с помощью блока 250 преобразователей; альтернативные средства, обеспечивающие подобный сбор пузырьков для их периодического выпуска для обнаружения в блоке 250 преобразователей, также находятся в пределах объема настоящего изобретения, например, могут использоваться одна или более управляемых полостей для сбора пузырьков, которые выполнены с возможностью сбора в первом состоянии пузырьков, принятых в пределах зоны, заданной нижним внешним краем 220, и с возможностью выпуска во втором состоянии собранных пузырьков для их обнаружения посредством блока 250 преобразователей. Например, полости для сбора пузырьков выполнены с использованием одного или более полых элементов с соответствующими одним или более отверстиями доступа, которые вращаются для переключения между вышеупомянутыми первым и вторым состояниями.
В процессе работы клапан 300 периодически закрывается для сбора одного или более пузырьков 270 ниже клапана 300 и затем открывается, чтобы дать возможность одному или более пузырькам 270 проходить мимо блока 250 преобразователей, например мимо гидрофона 260, для создания четко различимого звука пузырьков в сигнале S1, который периодически обрабатывается блоком 280 обработки сигналов, для формирования выходного сигнала S2. Опционально, открытие и закрытие дроссельного клапана 300 происходит под управлением блока 280 обработки сигналов. При отсутствии пузырьков 270, открытие и закрытие клапана 300 оказывает незначительное влияние на сигнал S1; напротив, когда один или более пузырьков 270 присутствуют, открытие клапана 300 периодически вызывает соответствующий выброс одного или более пузырьков, что отчетливо проявляется в виде одного или более различимых составляющих сигнала в сигнале S1. Открытие и закрытие клапана 300, с соответствующими изменениями, относится к альтернативным вариантам клапана 300, как описано выше.
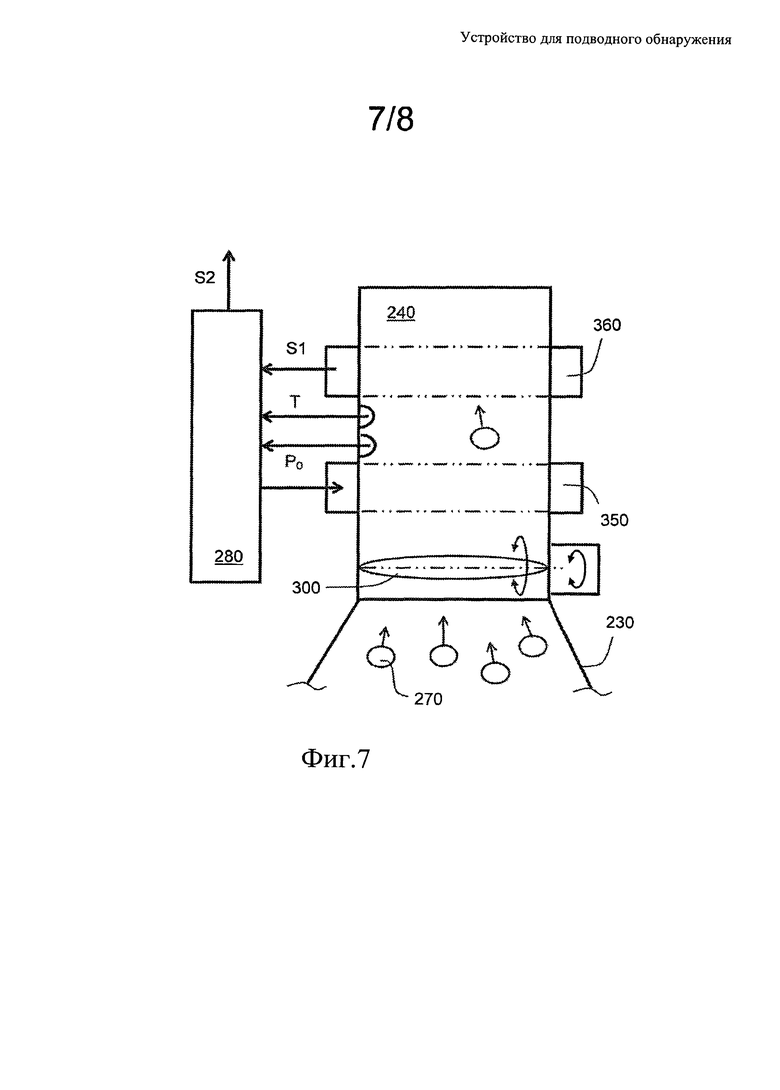
Опционально, сенсорное устройство 200 реализовано активным, при этом жидкость, протекающая через зону 240 горловины, зондируется с помощью акустического излучения, а соответствующие переданные и/или отраженные акустические сигналы обнаруживаются и далее обрабатываются в блоке 280 обработки сигналов; другими словами, блок 250 преобразователей предпочтительно выполнен с возможностью активного зондирования для обнаружения одного или более пузырьков 270, присутствующих в зоне 240 горловины. Опционально используется активное оптическое зондирование. На фиг. 6 представлена опциональная конфигурация сенсорного устройства 200, в которой один или более акустических преобразователей 350 испускают акустическое излучение в зону 240 горловины, через которую протекает жидкость, например, потенциально содержащая один или более пузырьков 270. Один или более акустических преобразователей 350 соединены с указанным блоком 280 обработки сигналов, который также содержит источник 380 сигнала для возбуждения одного или более преобразователей 350. Предпочтительно, один или более преобразователей 350 выполнены в виде одного или более пьезоэлектрических устройств и/или электромагнитных устройств. Опционально, один или более акустических преобразователей 350 размещены в одном общем корпусе с гидрофоном 260.
Кроме того, также используются один или более принимающих датчиков 360 для приема отраженного и/или переданного излучения из жидкости в зоне 240 горловины. Опционально, применяется круговая конфигурация преобразователей для реализации одного или более преобразователей 350, 360, например, как показано на фиг. 7, где один или более преобразователей 350 выполнены с возможностью возбуждения отдельно или в группах, и один или более датчиков 360 используются для приема сигналов отдельно или в группах. Например, множество датчиков 360 используются для создания соответствующего множества сигналов S1, которые взаимно вычитаются для удаления шума окружающей среды, общего для датчиков 360, и для отделения дифференциальных акустических сигналов от датчиков, на которые сильно воздействуют один или более пузырьков 270, присутствующих в пределах зоны 240 горловины. Такой способ работы может использоваться для обнаружения в поперечном направлении неравномерных распределений пузырьков 270 внутри зоны 240 горловины. Один или более акустических датчиков 360, создающих сигнал S1, соединены с блоком 280 обработки сигналов, который выполняет анализ сигналов для формирования выходного сигнала S2, указывающего на присутствие одного или более пузырьков 270 в пределах зоны 240 горловины.
В отношении фиг. 6, а также опционально в отношении фиг. 7, блок 280 обработки сигналов выполнен с возможностью возбуждения одного или более преобразователей 350 в диапазоне частот и/или диапазоне интенсивностей и одновременного получения сигнала S1 от одного или более датчиков 360. Диапазон частот предпочтительно находится в пределах диапазона от 1 кГц до 10 МГц, предпочтительнее в диапазоне от 10 кГц до 5 МГц и наиболее предпочтительно в диапазоне от 100 кГц до 1 МГц. Кроме того, диапазон частот используется для получения информации относительно радиусов R0 одного или более пузырьков 270, присутствующих внутри зоны 240 горловины; блок 280 обработки сигналов выполнен с возможностью применения уравнения 1 (1) для вычисления радиусов R0. Опционально, зона 240 горловины оснащена дополнительными датчиками для определения различных параметров, указанных в уравнении 1 (1), например, статического давления воды р0 и температуры T, относящихся к зоне 240 горловины, с использованием которых блоком 280 обработки сигналов может быть вычислена плотность р воды в зоне 240 горловины; опционально, дополнительные датчики пространственно размещены локально в области зоны 240 горловины. Диапазон интенсивностей используется для приведения одного или более пузырьков 270, присутствующих в зоне 240 горловины, в возрастающие степени нелинейного резонанса, например для создания гармоники второго порядка и более высокого порядка акустического излучения, созданного одним или более преобразователями 350 и обнаруживаемого одним или более датчиками 360 для формирования сигнала S1. Опционально, клапан 300 устанавливается пространственно ниже одного или более преобразователей и датчиков 350, 360 для периодического прерывания потока жидкости через зону 240 горловины, например для периодического прерывания потока одного или более пузырьков 270, при этом отсутствие пузырьков 270 в зоне 240 горловины в результате предотвращения их появления клапаном 300 в пространственной близости от одного или более преобразователей и датчиков 350, 360 ведет к отсутствию гармонических составляющих в сигнале S1, по мере того как акустическое излучение, испущенное одним или более преобразователями 350, изменяется по интенсивности.
Далее работа устройства 100 будет описана со ссылкой на фиг. 2-8. Как показано на фиг. 8, устройство 100 транспортируется на палубе 500 судна 520 к водному местоположению 530, после чего проводится исследование одного или более пузырьков 270 в водной среде 10. Такие один или более пузырьков 270 потенциально поднимаются от одного или более из следующего: геологическая формация 30 в местоположении 530; морское дно 40 в местоположении 530; геологическая формация 30; устройство 540, находящееся на морском дне 40, например трубопровод, и/или электрический кабель, и/или затонувшее водное судно. Например, настоящее изобретение полезно, когда в экранированном подводном кабеле возникает неисправность изоляции, которая не выявляется с помощью обнаружения электромагнитным излучением вследствие того, что внешний электромагнитный заземленный экран кабеля остается неповрежденным, но обнаруживается в результате того, что повреждение внутренней изоляции кабеля вызывает нагрев и обугливание пластмассовой изоляции, что приводит к возникновению одного или более пузырьков.
Когда судно 520 прибывает в местоположение 530, устройство 100 перемещается в водную среду 10, например, при помощи крана, установленного на палубе 500. Устройство 100 перемещается в водной среде 10, производя поиск одного или более пузырьков 270 посредством первой конструкции 210, которая собирает один или более поднимающихся вверх пузырьков 270 и направляет их посредством второй конструкции 230 в зону 240 горловины и тем самым к блоку 250 преобразователей для их обнаружения, как описано выше. Устройство 100 традиционно выполнено в виде дистанционно управляемого транспортного средства (ROV), например в виде миниатюрной подводной лодки и т.п. Предпочтительно, устройство 100 выполнено с возможностью маневрирования посредством дистанционного управления с судна 520 и/или автономного маневрирования с помощью локального управления, реализованного в устройстве 100, например, посредством компьютерной системы, выполненной с возможностью исполнения программного обеспечения для управления устройством 100 для систематического поиска одного или более пузырьков 270 внутри заданной области пространства в водной среде 10. Опционально, компьютерная система выполнена с возможностью управления устройством 100 для выполнения общего поиска пузырьков в первом режиме работы и тщательного поиска в пределах заданной области во втором режиме работы в случае, если один или более пузырьков 270 обнаруживаются в первом режиме работы. Такой способ функционирования устройства 100 потенциально дает возможность исследовать большие площади морского дна 40 при осуществлении поиска признаков и/или структур, порождающих один или более пузырьков 270. Например, в первом режиме обнаруживаются газовые пузырьки 270, в то время как более подробный анализ, в том числе химический анализ собранных пузырьков 270, выполняется во втором режиме работы.
Опционально, зона 240 горловины имеет горизонтальную площадь поперечного сечения, которая составляет менее 50% площади сбора пузырьков, заданной нижним внешним краем 220, опционально менее 25% указанной площади сбора пузырьков и опционально менее 10% указанной площади сбора пузырьков. Опционально, как упомянуто выше, вторая конструкция 230 выполнена в виде, по существу, направленного вверх усеченного конуса, в целом направленного вверх конуса, асимметрического направленного вверх конуса, направленного вверх конуса, у которого пространственная протяженность может динамически изменяться в процессе работы, или любой комбинации указанных опциональных вариантов.
Опционально, устройство 100 содержит блок сбора одного или более пузырьков 270 после их прохождения через зону 240 горловины для последующего анализа для определения их химической природы, например для определения метана, газообразных продуктов от перегретой электрической пластмассовой изоляции, воздушных пузырьков из затонувшей поврежденной субмарины и т.п. Опционально, анализ одного или более собранных пузырьков 270 осуществляется, когда устройство 100 возвращается к своему судну 520 и соответствующей палубе 500. Альтернативно, устройство 100 содержит один или более газоанализаторов, пространственно интегрированных с ним, для анализа химического состава одного или более собранных пузырьков 270 из зоны 240 обнаружения, например, в реальном времени; такие один или более газоанализаторов предпочтительно включают по меньшей мере одно из следующего: инфракрасные оптические датчики, электрохимические датчики, датчики горения (например, пеллисторы), полупроводниковые газовые датчики, акустические газовые датчики.
Предпочтительно, устройство 100 сконфигурировано для определения пузырьков нефти, присутствующих в воде и поднимающихся в зону 240 горловины, например, возникающих от утечек в подводных нефтепроводах и в подводных нефтяных клапанах, например, связанных с оборудованием («елкой») устья подводных скважин. Такие нефтяные пузырьки характеризуются интенсивным вязкостным демпфированием, лишенным резонансных эффектов, в виде функции интенсивности зондирования ультразвуковым излучением. Однако такие нефтяные пузырьки имеют плотность, которая часто меньше плотности соленой воды, в результате чего они движутся в зону 240 горловины. Предпочтительно, блок 250 преобразователей опционально снабжен акустическим передающим преобразователем и соответствующим приемным преобразователем для измерения акустического импеданса зоны 240 горловины как функции времени. По мере того как нефтяные пузырьки проникают в зону 240 горловины и проходят через нее при работе устройства, модулируется эффективность связи акустической энергии, распространяющейся от передающего преобразователя к приемному преобразователю. Например, если передающий преобразователь возбуждается с использованием сигнала постоянной амплитуды и частоты, соответствующий выходной сигнал из приемного преобразователя изменяется по мере того, как нефтяные пузырьки поступают в зону 240 горловины. Измеряя изменения во времени выходного сигнала от приемного преобразователя, например, в блоке 280 обработки сигналов, с помощью рекурсивной фильтрации, быстрого преобразования Фурье (Fast Fourier Transform) (FFT) и т.п., можно определить спектральные характеристики газовых пузырьков и нефтяных пузырьков. Опционально, клапан 300 используется в закрытом состоянии для сбора газовых и нефтяных пузырьков, находящихся снизу, а затем переключается в открытое состояние, чтобы дать возможность газовым пузырькам поднятья первыми, после чего следуют нефтяные пузырьки. Временные характеристики акустической связи между передающим преобразователем и приемным преобразователем, по мере того как в зоне 240 горловины сначала поднимаются газовые пузырьки, а затем нефтяные пузырьки, могут предоставить ценную информацию об утечках и других процессах, происходящих под водой. Дополнительно или альтернативно, для определения плотности зоны 240 горловины используется время прохождения импульсов акустического излучения от передающего преобразователя к приемному преобразователю. Изменения во времени значения времени прохождения отслеживаются блоком 280 обработки сигналов для идентификации природы пузырьков газа или нефти, проходящих через зону 240 горловины.
Возможны модификации описанных вариантов осуществления изобретения в пределах сущности изобретения, определяемой прилагаемой формулой изобретения. Выражения, такие как «включающий», «содержащий», «состоящий из», «имеющий», «являющийся», используемые в описании и формуле изобретения, должны пониматься в неисключительном смысле, то есть могут также присутствовать объекты, компоненты или элементы, явно не описанные. Ссылка на единственное число также включает множественное число. Цифры, заключенные в скобки в прилагаемой формуле изобретения, предназначены для лучшего понимания формулы изобретения и не ограничивают изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА | 2015 |
|
RU2592741C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ВЫТЕСНЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ОТ МОРСКОЙ НЕФТЕГАЗОВОЙ ПЛАТФОРМЫ | 2010 |
|
RU2434245C2 |
| ПАССИВНО-АКТИВНЫЙ АКУСТИЧЕСКИЙ МЕТОД ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА В ГАЗОЖИДКОСТНОЙ СРЕДЕ | 2015 |
|
RU2584721C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ТЕЧИ ПОДВОДНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2605779C1 |

Использование: для подводного обнаружения присутствия одного или более пузырьков. Сущность изобретения заключается в том, что устройство для подводного обнаружения присутствия одного или более пузырьков в водной среде содержит первую конструкцию, имеющую нижний внешний край для задания области, в пределах которой устройство обладает возможностью сбора одного или более пузырьков, вторую конструкцию для обеспечения пространственной концентрации в зоне обнаружения одного или более пузырьков, принятых в пределах области, заданной нижним внешним краем, и блок обнаружения для обнаружения одного или более пузырьков, сконцентрированных при работе устройства с помощью конструкции для обеспечения концентрации пузырьков, проходящих в зону обнаружения, и для формирования выходного сигнала, указывающего на прохождение одного или более пузырьков через зону обнаружения. Устройство опционально устанавливается на дистанционно управляемом водном транспортном средстве (ROV). Устройство предпочтительно используется для исследования источников одного или более пузырьков в водных средах, например утечек при разведке и/или добыче нефти, поврежденных электрических подводных кабелей, утечек в морских газопроводах и т.п. Технический результат: обеспечение возможности надежного обнаружения пузырьков при наличии мешающих частиц в водной среде. 2 н. и 25 з.п. ф-лы, 8 ил.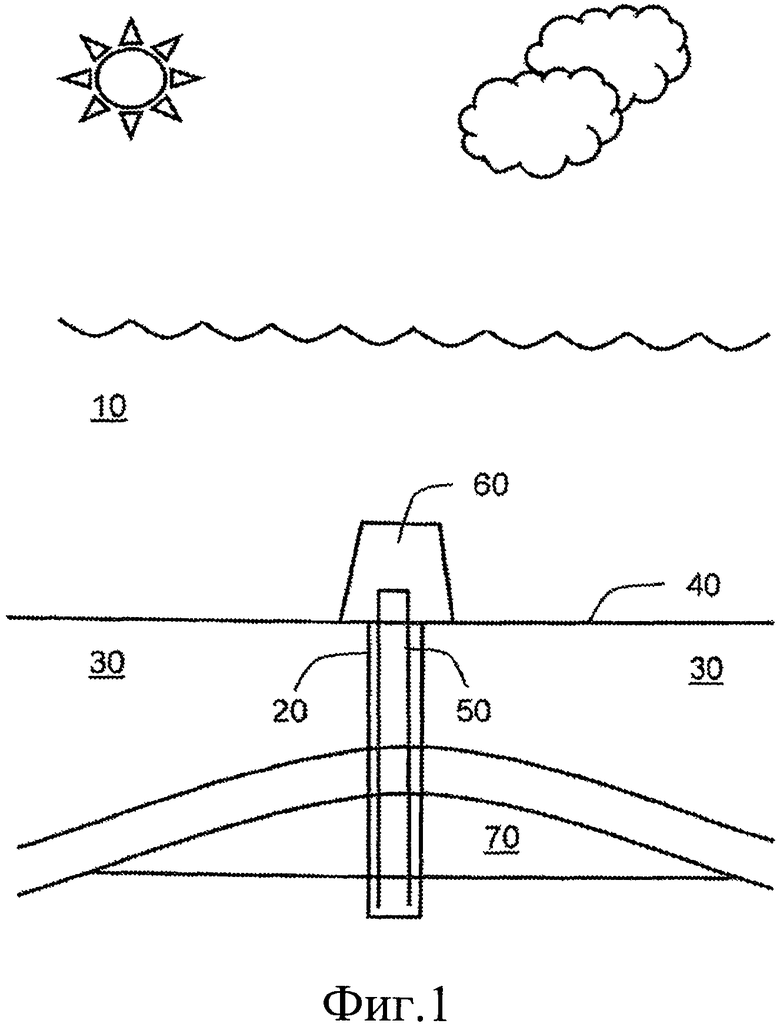
1. Устройство (100) для подводного обнаружения присутствия одного или более пузырьков (270) в водной среде (10), отличающееся тем, что оно содержит первую конструкцию (210), имеющую нижний внешний край (220) для задания области, в пределах которой упомянутое устройство (100) обладает возможностью сбора одного или более пузырьков (270), вторую конструкцию (230) для обеспечения пространственной концентрации в зоне (240) обнаружения одного или более пузырьков (270), принятых в пределах области, заданной нижним внешним краем (220), и блок (240, 250) обнаружения для обнаружения одного или более пузырьков (270), сконцентрированных при работе устройства с помощью конструкции (210) для обеспечения концентрации пузырьков и проходящих в зоне (240) обнаружения, и для формирования выходного сигнала (S2), указывающего на прохождение одного или более пузырьков (270) через зону (240) обнаружения.
2. Устройство по п. 1, отличающееся тем, что оно выполнено с возможностью обнаружения одного или более газовых пузырьков (270) и/или одного или более нефтяных пузырьков (270).
3. Устройство по п. 1 или 2, отличающееся тем, что вторая конструкция (230) выполнена в виде, по существу, усеченного конуса для пространственного ограничения объема, в котором при работе устройства концентрируются один или более пузырьков (270).
4. Устройство по п. 1 или 2, отличающееся тем, что блок (240, 250) обнаружения содержит один или более датчиков (260, 300) для пассивного обнаружения звуков, создаваемых упомянутыми одним или более пузырьками (270), проходящими при работе устройства через зону (240) обнаружения, для формирования сигнала (S1) обнаружения, и блок (280) обработки сигналов для обработки сигнала (S1) обнаружения для формирования упомянутого выходного сигнала (S2), указывающего на присутствие и/или отсутствие одного или более пузырьков (270) в пределах зоны (240) обнаружения.
5. Устройство по п. 1 или 2, отличающееся тем, что упомянутый блок (240, 250) обнаружения содержит источник (380) сигнала для зондирования при работе устройства зоны (240) обнаружения с использованием зондирующего излучения и один или более датчиков для обнаружения одного или более пузырьков (270), присутствующих в зоне (240) обнаружения, посредством переданных и/или отраженных порций зондирующего излучения.
6. Устройство по п. 5, отличающееся тем, что упомянутый источник (380) сигнала и упомянутые один или более датчиков упомянутого блока (24, 250) обнаружения размещены внутри одного общего блока.
7. Устройство по п. 5, отличающееся тем, что блок (240, 250, 280) обнаружения содержит блок (280) обработки сигналов для измерения времени прохождения зондирующего излучения через зону (240) обнаружения и/или акустического импеданса зоны (240) обнаружения для определения присутствия одного или более пузырьков (270), поднимающихся в пределах зоны (240) обнаружения.
8. Устройство по п. 5, отличающееся тем, что источник сигнала для формирования зондирующего излучения является регулируемым по частоте и/или амплитуде для возбуждения нелинейного резонанса в упомянутых одном или более пузырьках (270), при этом упомянутый выходной сигнал (S2), указывающий на присутствие одного или более пузырьков (270) в зоне (240) обнаружения, формируется блоком (240, 250) обнаружения на основе гармонических составляющих сигнала, образованных в результате возбуждения упомянутого нелинейного резонанса в одном или более пузырьках (270).
9. Устройство по п. 1 или 2, отличающееся тем, что оно также содержит блок (300) для периодического прерывания при работе устройства подачи собранных пузырьков (270) из конструкции (210) для обеспечения концентрации пузырьков в зону (240) обнаружения для предоставления возможности различения упомянутым устройством (100) сигналов от блока (240, 250) обнаружения, указывающих на присутствие пузырьков (270) в зоне (240) обнаружения, и сигналов, указывающих на отсутствие пузырьков (270) в зоне (240) обнаружения.
10. Устройство по п. 9, отличающееся тем, что упомянутый блок для периодического прерывания при работе устройства подачи собранных пузырьков (270) из первой конструкции (210) в зону (240) обнаружения содержит по меньшей мере одно из следующего:
(i) управляемый клапан (300), пространственно расположенный при работе ниже упомянутого блока (240, 250) обнаружения, и
(ii) управляемый блок сбора пузырьков, выполненный с возможностью периодического выпуска из него одного или более собранных пузырьков (270) в зону (240) обнаружения.
11. Устройство по п. 1 или 2, отличающееся тем, что упомянутая зона (240) обнаружения также содержит датчик температуры и датчик давления для обеспечения возможности определения блоком (280) обработки сигналов размеров одного или более пузырьков (270) на основе их измеренных частот нелинейного резонанса.
12. Устройство по п. 1 или 2, отличающееся тем, что оно выполнено с возможностью установки на дистанционно управляемом транспортном средстве (ROV) для проведения работы.
13. Устройство по п. 1 или 2, отличающееся тем, что зона (240) обнаружения снабжена газоанализатором для анализа состава одного или более пузырьков (270), проходящих при работе устройства через зону (240) обнаружения.
14. Устройство по п. 1 или 2, отличающееся тем, что блок (280) обработки сигналов выполнен с возможностью возбуждения блока (240, 250) обнаружения на частоте в диапазоне от 1 кГц до 10 МГц, предпочтительнее в диапазоне от 10 кГц до 5 МГц и наиболее предпочтительно в диапазоне от 100 кГц до 1 МГц.
15. Способ применения устройства (100) для подводного обнаружения для обнаружения присутствия одного или более пузырьков (270) в водной среде (10), отличающийся тем, что он включает:
(a) использование первой конструкции (210), имеющей нижний внешний край (220), для задания области сбора одного или более пузырьков (270) для упомянутого устройства (100);
(b) использование второй конструкции (230) для обеспечения пространственной концентрации в зоне (240) обнаружения одного или более пузырьков (270), принятых в пределах области, заданной нижним внешним краем (220), и
(c) использование блока (240, 250) обнаружения для обнаружения одного или более пузырьков (270), сконцентрированных при работе устройства с помощью второй конструкции (210) в зоне (240) обнаружения, и для формирования выходного сигнала (S2), указывающего на прохождение одного или более пузырьков (270) через зону (240) обнаружения.
16. Способ по п. 15, отличающийся тем, что он включает применение блока (280) обработки сигналов для обнаружения одного или более газовых пузырьков (270) и/или одного или более нефтяных пузырьков (270).
17. Способ по п. 15 или 16, отличающийся тем, что он включает выполнение упомянутой второй конструкции (230) в виде, по существу, усеченного конуса для пространственного ограничения объема, в котором при работе устройства концентрируются один или более пузырьков (270).
18. Способ по п. 15 или 16, отличающийся тем, что он включает использование одного или более датчиков (300) в блоке (240, 250) обнаружения для пассивного обнаружения звуков, создаваемых одним или более пузырьками (270), проходящими при работе устройства через зону (240) обнаружения, для формирования сигнала (S1) обнаружения, и использование блока (280) обработки сигналов для обработки сигнала (S1) обнаружения для формирования упомянутого выходного сигнала (S2), указывающего на присутствие и/или отсутствие одного или более пузырьков (270) в пределах зоны (240) обнаружения.
19. Способ по п. 15 или 16, отличающийся тем, что он включает использование источника (380) сигнала упомянутого блока (240, 250) обнаружения для зондирования при работе устройства зоны (240) обнаружения с помощью соответствующего зондирующего излучения и использование одного или более датчиков для обнаружения одного или более пузырьков (270), присутствующих в зоне (240) обнаружения, посредством переданных и/или отраженных порций зондирующего излучения.
20. Способ по п. 19, отличающийся тем, что он включает использование блока (280) обработки сигналов в блоке (240, 250, 280) обнаружения для измерения времени прохождения зондирующего излучения через зону (240) обнаружения и/или акустического импеданса зоны (240) обнаружения для определения присутствия одного или более пузырьков (270), поднимающихся в пределах зоны (240) обнаружения.
21. Способ по п. 19, отличающийся тем, что он включает регулирование источника сигнала по частоте и/или амплитуде для формирования зондирующего излучения для возбуждения нелинейного резонанса в упомянутых одном или более пузырьках (270) и определение в упомянутом сигнале (S1), указывающем на присутствие одного или более пузырьков (270) в зоне (240) обнаружения, гармонических составляющих сигнала, образованных в результате возбуждения упомянутого нелинейного резонанса в одном или более пузырьках (270), для формирования выходного сигнала (S2) для выдачи этого выходного сигнала (S2).
22. Способ по п. 15 или 16, отличающийся тем, что он также включает использование блока (300) для периодического прерывания при работе устройства подачи собранных пузырьков (270) из конструкции (210) для обеспечения концентрации пузырьков в зону (240) обнаружения для предоставления возможности различения упомянутым устройством (100) сигналов из блока (240, 250) обнаружения, указывающих на присутствие пузырьков (270) в зоне (240) обнаружения, и сигналов, указывающих на отсутствие пузырьков (270) в зоне (240) обнаружения.
23. Способ по п. 22, отличающийся тем, что он включает реализацию блока для периодического прерывания при работе устройства подачи собранных пузырьков (270) из второй конструкции (210) в зону (240) обнаружения с применением по меньшей мере одного из следующего:
(i) управляемый клапан (300), пространственно расположенный при работе ниже упомянутого блока (240, 250) обнаружения, и
(ii) управляемый блок сбора пузырьков, выполненный с возможностью периодического выпуска из него одного или более собранных пузырьков (270) в зону (240) обнаружения.
24. Способ по п. 15 или 16, отличающийся тем, что он включает использование в отношении зоны (240) обнаружения датчика температуры и датчика давления для обеспечения возможности определения блоком (280) обработки сигналов размеров одного или более пузырьков (270) на основе их измеренных частот нелинейного резонанса.
25. Способ по п. 15 или 16, отличающийся тем, что он включает выполнение упомянутого устройства (100) с возможностью установки на дистанционно управляемом транспортном средстве (ROV) для проведения работы.
26. Способ по п. 15 или 16, отличающийся тем, что он включает снабжение упомянутой зоны (240) обнаружения газоанализатором для анализа состава одного или более пузырьков (270), проходящих при работе устройства через зону (240) обнаружения.
27. Способ по п. 15 или 16, отличающийся тем, что он включает управление блоком (280) обработки сигналов для возбуждения блока (240, 250) обнаружения на частоте в диапазоне от 1 кГц до 10 МГц, предпочтительнее в диапазоне от 10 кГц до 5 МГц и наиболее предпочтительно в диапазоне от 100 кГц до 1 МГц.
| УСТРОЙСТВО ПРОДОЛЬНОЙ СВЯЗИ ТЕЛЕЖКИ С КУЗОВОМ ЛОКОМОТИВА | 1999 |
|
RU2176604C2 |
| US 20030056568A1, 27.03.2003 | |||
| US 6142008A, 07.11.2000 | |||
| Устройство для определения распределения газовых пузырьков в жидкости по размерам | 1990 |
|
SU1805377A1 |
| Прибор для измерения пузырьков газа в жидкости | 1959 |
|
SU128203A1 |
| УЛЬТРАЗВУКОВОЙ ПРИБОР ДЛЯ ОБНАРУЖЕН ГАЗОВЫХ ПУЗЫРЕЙ В ПОТОКЕ ЖИДКОСТИ}jq | 0 |
|
SU301177A1 |

