Область техники, к которой относится изобретение
Изобретение относится к области поиска затонувшего радиационного источника и может быть использовано для поиска затонувших в море радиационных источников автономным необитаемым подводным аппаратом (АНПА).
Технический уровень
В качестве затонувшего радиационного источника рассматривается объект техногенного происхождения, содержащий источники ионизирующего излучения и делящиеся материалы, такой как радиоизотопная энергетическая установка, ядерный реактор, контейнер с радиационно-опасным грузом и т.п.Как показывает практический опыт, поиск затонувшего радиационного источника, даже в случае известных координат района затопления, является сложной технической задачей. Поиск затонувшего объекта осуществляют по визуальным (окраска, маркировка, шероховатость поверхности, форма) и габаритным (размеры, диаметр) характеристикам, а также по возмущению физических полей, создаваемых объектом (радиационных, магнитных) [1-3].
Регистрация гамма-излучения под водой возможна погружными гамма-спектрометрами (ПГСМ). Известны ПГСМ российских разработчиков. ФГУП «Крыловский государственный научный центр» использовало для обследования затонувших атомных подводных лодок «Комсомолец» и «Курск» в составе обитаемых подводных аппаратов ПГСМ ЭКО-5 (7, 8) на кристалле NaJ (Т1). Специалисты ФГБУ Национальный исследовательский центр «Курчатовский институт» провели обследование районов захоронений радиоактивных отходов в Арктических морях погружными ПГСМ серии РЭМ с плавательных средств. ЗАО «Гранит-7» разработало ПГСМ серии СЕГ для оснащения телеуправляемых НПА [1, 4].
Регистрация наличия ионизирующих излучений в водной среде возможна дистанционным методом, основанном на регистрации черенковского излучения ультрафиолетовыми (УФ) камерами, регистрирующими излучение в диапазоне волн 240-280 нм. Известен «Детектор черенковского излучения» патент РФ 2092871 (МПК G01T 1/22, G02B 5/20, опубл. 10.10.1997). Обнаружение и регистрацию радиоактивности в водной среде в условиях высоких уровней внешнего светового фона осуществляют детектором черенковского излучения, в состав которого входит фоточувствительный элемент фотоприемника и солнечно-слепой фильтр. Для снижения влияния солнечной засветки используют прожекторы на голубых лазерных светодиодах на основе GaN.
Для обнаружения затонувшего объекта применяют гидроакустические технические средства - гидролокаторы бокового, прямого или секторного обзора, многолучевые эхолоты - позволяющие оценить габариты и форму донных объектов по акустическим изображениям, а также обнаружить заиленные до некоторого уровня объекты и оценить их положение на грунте. На работу гидроакустических средств оказывают влияние маскирующие и искажающие акустические помехи, рефракция и реверберация звука, вызываемые вертикальной пространственно-временной изменчивостью региональных океанологических процессов [2]. Серьезным ограничением использования гидроакустических средств являются реверберационные помехи, вызываемые отражениями и рассеяниями исходного звука от дна, а также от неоднородностей придонной среды, наблюдаемые в условиях мелководья. Использование многолучевого эхолота перспективно в качестве средства-компоненты поисковых комплексов [5].
Дополнительным фактором, позволяющим обнаружить объект даже при погружении в ил (донные осадки), является наличие характерного магнитного поля. Морская магнитометрия успешно используется для поиска подводных объектов в условиях их естественной маскировки, таких как илистый грунт, донная флора, складки рельефа дна [2]. В качестве целевой нагрузки для АНПА, с учетом опыта выполнения поисковых задач по обнаружению и распознаванию большинства типов ферромагнитных объектов, ведения гидромагнитной разведки и сбора магнитографической информации, возможно применение многоканальной магнитометрической сенсорной системы, состоящей из нескольких чувствительных элементов, пространственно-расположенных по принципу градиентометра [2, 3].
В базовую комплектацию АНПА, как правило, входит система технического зрения. Известно, что в воде световой поток ослабляется значительно сильнее, чем в атмосфере. Ослабление излучения компенсируют повышением мощности светового пучка, однако это приводит к увеличению яркости дымки обратного рассеяния, снижающей контрастность изображения. Опыт эксплуатации подводных телевизионных систем показывает, что для увеличения предельной оптической глубины всего на 15-20%, нужно увеличить мощность источника света в 10 раз. В случае малых размеров затонувших объектов, поиск с использованием системы технического зрения малоэффективен. К особенностям подводных изображений относится их высокая зашумленность и малый контраст, что требует применения более эффективных методов и средств обнаружения и распознавания. Оптические средства поиска под водой применяются как правило на этапе допоиска.
Новым поколением телевизионных средств подводного наблюдения является система наблюдения с лазерной телевизионной подсветкой. Дальность действия лазерных осветителей в несколько раз превосходит возможности прожекторных осветителей. Преимущество лазерных осветителей перед традиционными прожекторными состоит в высокой концентрации световой энергии в узком световом пучке, что компенсирует потери фотонов при их распространении, а также в монохроматичности (излучении на одной длине волны), в когерентности, направленности, возможности использования импульсного метода освещения [6].
Для бортовой системы управления исследовательским оборудованием АНПА определяющими являются возможность обработки изображений в реальном времени (фильтрация изображений, выделение и распознавание объектов), а также накопители данных для сохранения изображений объемом до 1 Гб/ч. Для решения задачи автоматического поиска и распознавания заданных объектов требуется наличие на борту АНПА базы идентифицирующих объект поиска характеристик и обеспечение быстрого доступа к ним, высокоскоростное выполнение операций обработки и сравнения фото и акустических изображений (сонограмм).
Применение одноплатных компьютеров на базе процессоров линии х86 является наиболее быстрым и малозатратным путем решения задач обработки данных, причем системные задачи и задачи обработки данных разрабатываются в одной среде. Интеграция на одной моноплате всех необходимых узлов и интерфейсов уменьшает габариты устройства, количество разъемов и как следствие - повышает его надежность. Таким требованиям в максимальной степени удовлетворяют, например, одноплатные компьютеры стандартов PC-104/104+ и COM Express Туре 10 [7].
Известны способы распознавания объектов на основе анализа фрактальных размеров (метрик, кодов), например, для распознавания радиолокационных целей. Фрактальные размеры являются наиболее экономичным способом распознавания объектов по визуальным и габаритным характеристикам [8, 9].
Аналоги
Известны способы обнаружения затонувшего радиационного источника с применением ПГСМ, которые размещают на АНПА или погружают с надводных плавательных средств. В автономном режиме информация записывается в блок памяти спектрометра и по возвращении АНПА на базу переносится на электронно-вычислительный комплекс для дальнейшей обработки [10]. Известен «Способ поиска радиоактивных объектов под водой и комплекс для реализации способа» патент РФ 2420762 (МПК G01T 1/18, опубл. 10.06.2011). Способ предусматривает наличие подводных детекторов радиоактивного излучения, закрепленных на устройстве погружения, которое с помощью троса крепится к буксирующему устройству, выполненному в виде двух плавательных средств снабженных лебедками.
Недостатком способа является ограниченная глубина, значительные массо-габаритные характеристики и энергопотребление погружных спектрометров, необходимость ведения поиска на небольших расстояниях от дна акватории. Поиск альфа или бета-излучающих затонувших радиационных источников с применением ПГСМ возможен при наличии сопутствующего гамма-излучения с достаточной для регистрации частиц энергией и активностью.
Известен способ поиска радиоактивных объектов с применением детектора черенковского излучения, описанный в [3], в котором предлагают совмещать изображение, полученное погружной ультрафиолетовой (УФ) камерой, регистрирующей излучение в диапазоне волн 240-280 нм, с изображением в видимом диапазоне или полученного гидроакустическими средствами.
В акваториях, подвергшихся радиоактивному загрязнению, существуют локальные участки повышенного радиоактивного загрязнения донных отложений, обусловленных гидрологическими особенностями бухт [11], которые могут распознаваться, как затонувшие радиационные источники. Данный способ не позволяет однозначно идентифицировать обнаруженную радиационную аномалию, особенно в условиях радиоактивного загрязнения района поиска.
Известно «Устройство обнаружения объектов в водной среде» патент РФ 2585401 (МПК G01S 15/04, опубл. 27.05.2016). Устройство содержит блок приемоизлучателей (гидроакустическую антенну), блок усилителей и полосовых фильтров, блок аналого-цифровых преобразователей, блок согласованных фильтров, генератор сигнала посылки, усилитель мощности, измерительное устройство, вычислитель и детектор. Функцией блока согласованных фильтров является осуществление оптимального приема отраженного эхо-сигнала на фоне помех. Функцией измерительного устройства является измерение параметра формы распределения и характеристической частоты эхо-сигнала на выходе согласованного фильтра. Функцией вычислителя является вычисление отношения параметра формы и характеристической частоты эхо-сигнала. Функцией детектора является сравнение полученного числа на выходе вычислителя с пороговым значением и принятие решения: обнаружен искомый объект локации или нет. Предлагаемое устройство позволяет уменьшить влияние случайной погрешности и увеличить достоверность обнаружения объекта в присутствии шумов и помех.
В прибрежных районах на дне акваторий накоплено значительное количество техногенного мусора, что осложняет их однозначную идентификацию по какому-либо одному идентификационному признаку. Регистрация нескольких признаков, характеризующих объект поиска, повышает вероятность его обнаружения и правильной идентификации.
Известен «Способ обнаружения подводных ферромагнитных объектов и система для обнаружения подводных ферромагнитных объектов» патент РФ 2615050 (МПК G01V 3/08, опубл. 03.04.2017). Система для обнаружения подводных ферромагнитных объектов состоит из измерительной системы магнитного поля, блока управления, вычислительного блока, исполнительного блока, многолучевого эхолота и гидролокатора бокового обзора, блока обработки изображений.
Известны комбинированные системы для поиска мин на базе АНПА. Например, в состав АНПА системы RMS (США) входят различные поисковые средства: гидролокаторы бокового и переднего обзора, высокочастотный гидролокатор для определения размеров подводных объектов, видеосистема и система лазерного сканирования для идентификации объектов [10]. Система предназначена для поиска малогабаритных взрывоопасных объектов по габаритным и оптическим характеристикам.
Регистрируемые поисковыми техническими средствами значения носят нечеткий характер, обусловленный помехами, создаваемыми средой и погрешностью измерения, что может оказывать влияние на качество распознавания обнаруженного объекта по регистрируемым характеристикам. Одновременное использование нескольких технических средств поиска увеличивает энергетическое потребление и, как следствие, сокращает время непрерывной работы АНПА.
Прототип
Наиболее близким аналогом является способ обнаружения и распознавания малоразмерных подводных объектов с помощью АНПА, описанный в [12]. Предлагаемый способ предназначен для мониторинга акватории с целью выявления затонувших малоразмерных подводных объектов (мин) АНПА, который оснащают гидролокатором бокового обзора и фотосистемой. АНПА направляют для обзорно-поисковой миссии по траектории типа прямоугольный меандр. Акустические изображения в реальном времени обрабатывают интегрированной управляющей системой АНПА по специальным алгоритмам, включающим: построение карт градиентов, выделение границ объектов и выделение самих объектов с использованием процедур кластеризации, определение координат при обнаружении на дне объекта с заданными характеристиками. Координаты, размер и ориентацию объекта сравнивают с объектами из существующей базы данных. В случае отсутствия подобного объекта в базе данных, АНПА автоматически перепланирует миссию для выполнения дообследования найденного объекта методом сплошного фотопокрытия. Дообследование АНПА проводит с небольшой высоты (глубины) на малой скорости с учетом направления течения путем продольных перемещений аппарата носом-кормой, производит сплошное фотопокрытие объекта и его окрестности с некоторым запасом, учитывающим накопленную погрешность счисления пути. Одновременно с проведением фотосъемки предлагают производить электромагнитную гидролокацию и профилирование дна, а также определять температуру, соленость, радиоактивность и химический состав воды. По этим данным можно локализовать объект поиска даже в случае отсутствия визуального контакта с ним. Эти данные предлагают использовать для коррекции обследовательской траектории. Обнаруженный объект заносят в базу данных для предотвращения повторного обследования на текущем или последующем галсе обзорно-поисковой траектории. После окончания фотообследования АНПА возвращается к прерванной миссии, точка возврата находится на пройденном участке на некотором расстоянии от точки начала выполнения обследовательской части миссии с учетом погрешности счисления пути.
Способ ориентирован на регулярный мониторинг акваторий, для которых существуют базы данных обнаруженных ранее объектов. Способ не позволяет обнаруживать и распознавать объекты с заданными характеристиками и не учитывает наличие радиационных характеристик у объекта поиска.
Цель изобретения - создание комбинированной технической системы автоматического поиска затонувшего радиационного источника АНПА.
Техническим результатом изобретения является повышение точности и надежности поиска затонувшего радиационного источника техническими средствами АНПА, экономное использование энергетических ресурсов АНПА в процессе поиска радиационного источника.
Способ достижения технического результата.
Повышение точности и надежности поиска затонувшего радиационного источника техническими средствами АНПА достигается за счет использования алгоритмов нечеткой логики и фрактального распознавания обнаруженного объекта средствами бортового компьютера АНПА по результатам комбинированного обследования объектов на дне техническими средствами, основанными на различных физических принципах регистрации параметров состояния окружающей среды. Экономное использование энергетических ресурсов АНПА в процессе поиска затонувшего радиационного источника достигается тем, что осуществляют программно-управляемый поиск путем последовательного подключения и отключения технических средств АНПА по результатам выполнения алгоритмов обнаружения и распознавания затонувших объектов с автоматическим перестроением маршрутов поиска в следующей последовательности: гидроакустических средств поиска для обнаружения и первичного распознавания объекта по заданному маршруту, средств радиационного мониторинга и магнитометрии для допоиска по радиационным и ферромагнитным признакам, оптоэлектронной системы со средствами освещения подводной обстановки для допоиска методом сплошного фотопокрытия донного объекта, что позволяет снизить энергопотребление и увеличить время непрерывной работы и, как следствие, обследуемую площадь.
Сущность способа.
Сущность способа схематично поясняется на фигурах:
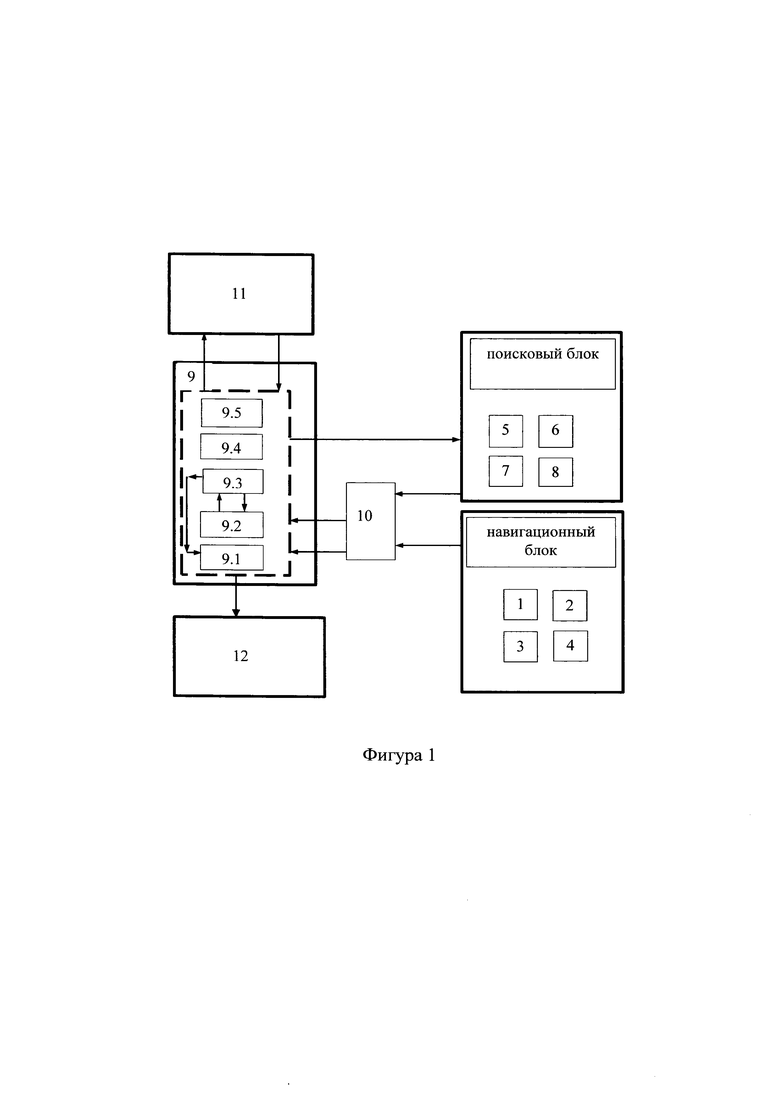
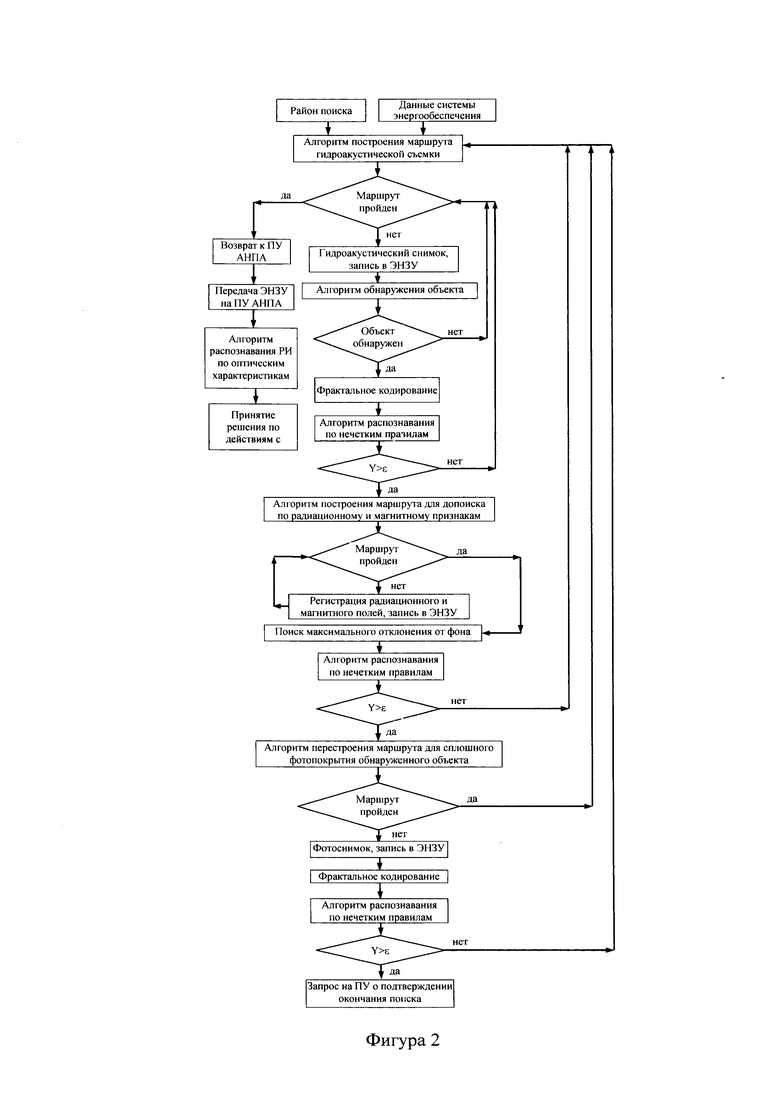
на фиг. 1 - показаны функциональные блоки поискового АНПА;
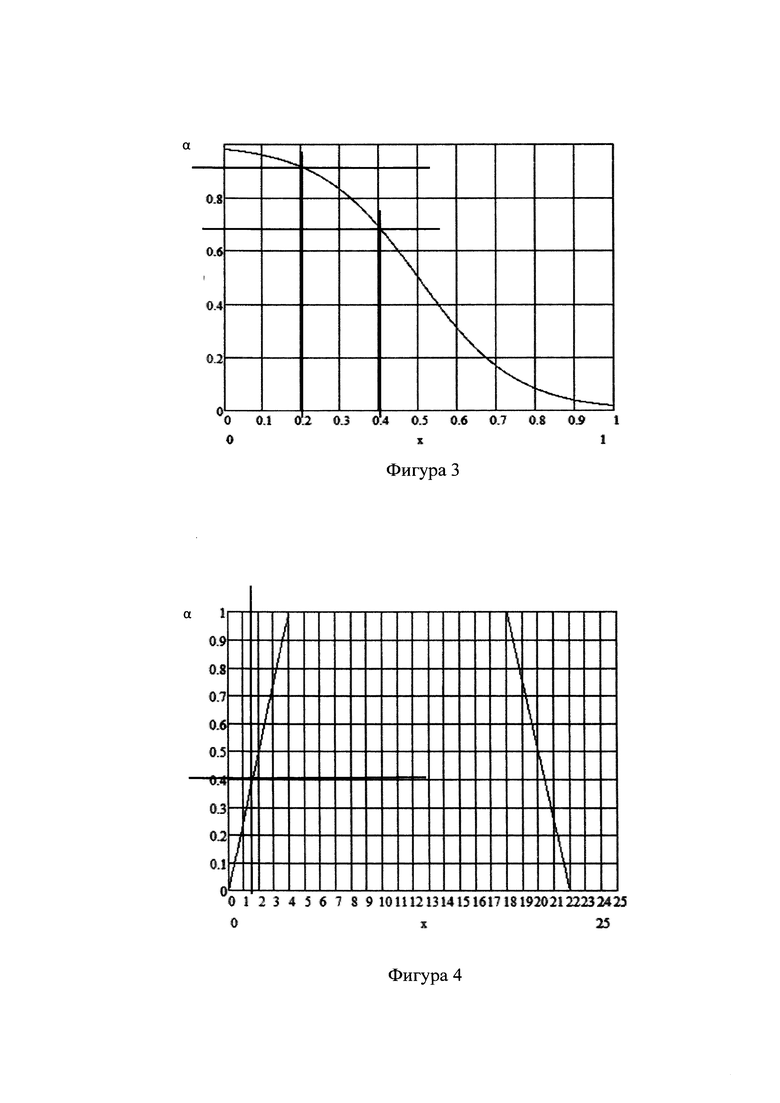
на фиг. 2 - показан алгоритм последовательного подключения и
отключения технических средств поиска затонувшего радиационного источника;
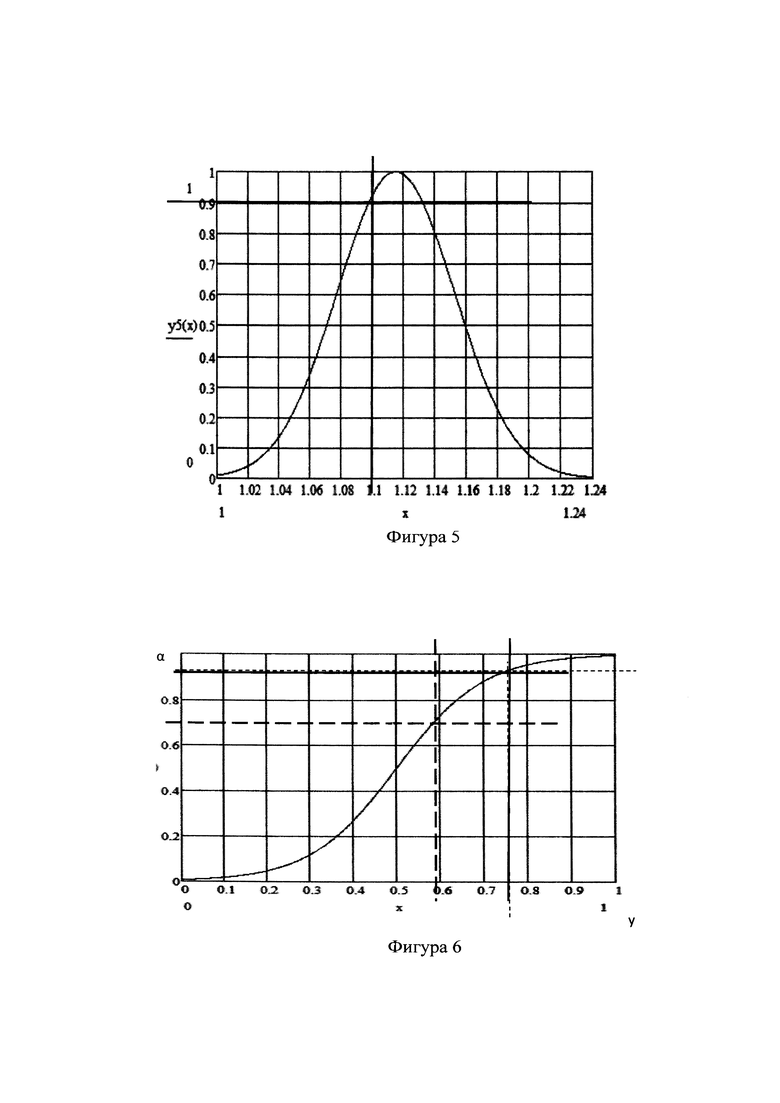
на фиг. 3-6 - показаны примеры функций принадлежности нечетким множествам для распознавания затонувших радиационных источников по входным данным от разнородных технических средств поиска: гидроакустического, радиационного, магнитометрического и оптического.
В качестве идентификационных характеристик затонувшего радиационного источника используют:
- габаритные: размер (длина, высота, ширина), диаметр;
- визуальные: маркировка, окраска (цветовой градиент), шероховатость поверхности, форма;
- магнитные: индукция, форма и амплитуда магнитных аномалий;
- радиационные: наличие излучения, активность, нуклидный состав.
При разрушении объекта поиска исходные характеристики радиационного источника могут частично изменяться.
Используемые для подводного поиска технические средства имеют разную поисковую производительность, обусловленную шириной полосы обзора, чувствительностью средств измерений, влиянием помех внешней среды и др. Наиболее высокой поисковой производительностью обладают гидроакустические технические средства [7]. Регистрация радиационного и магнитного полей, как правило, возможна на небольшом удалении детектора от источника возмущения - порядка нескольких десятков метров. Сплошное обследование района оптоэлектронными средствами предоставляет наиболее полную и достоверную информацию об объекте, но обладает самой низкой производительностью, требует высоких энергетических затрат для большого покрытия площади и минимально возможного сближения АНПА с исследуемым объектом, зависит от оптических свойств среды.
Подводная среда характеризуется наличием помех окружающего фона для всех известных технических средств поиска под водой:
- для визуальных сигналов помехи создает низкая освещенность, замутненность среды, а также изменение визуальных свойств объекта под воздействием окружающей среды: заиливание, обрастание подводной флорой, химическое воздействие морской воды и пр.;
- для магнитометрических средств погрешность в измерения вносит влияние неоднородного магнитного поля Земли: существенные изменения магнитного поля наблюдаются при движении вдоль параллелей на расстояние более 10 км;
- акустическое изображение всегда содержит шумы, обусловленные техническими особенностями гидроакустического средства поиска, отражающими характеристиками поверхности морского дна, наличием посторонних объектов, находящихся на дне, заиливанием объекта;
- для средств радиационного поиска создает помехи естественный радиационный фон за счет радиоактивности, создаваемой К40 и техногенных радионуклидов, ранее поступивших в морскую воду. Фоновое содержание и активность радионуклидов в морской воде и в донных отложениях на различных участках акватории не постоянны.
В силу нечеткости входных данных получаемый вывод о том, что объект найден, будет обладать некоторой неопределенностью, т.е. для принятия решения о соответствии обнаруженного объекта искомому часто невозможно сделать четкий вывод типа «да» - «нет», чаще приходят к выводу с нечетким характером, типа «скорее да» - «скорее нет».
Сущность способа состоит в том, что поиск затонувшего радиационного источника осуществляют комбинацией технических средств, основанных на различных физических принципах регистрации параметров окружающей среды. Технические средства, обладающие более низкой производительностью, подключают последовательно после получения положительных результатов поиска более производительными техническими средствами. В энергетически независимом запоминающем съемном устройстве (ЭНЗУ), подключенном к бортовому компьютеру АНПА, сохраняют радиационные, магнитометрические, фрактальные характеристики затонувшего радиационного источника. Алгоритм распознавания искомого радиационного источника, заложенный в бортовой компьютер АНПА, учитывает степень нечеткости данных, поступающих от технических средств поиска. Распознавание обнаруженного объекта по визуальным и габаритным характеристикам осуществляют путем сравнения рассчитанных программным обеспечением бортового компьютера АНПА фрактальных размеров фото и акустических изображений с фрактальными размерами искомого радиационного источника, сохраненными в энергетически независимом запоминающем устройстве (ЭНЗУ), подключенном к бортовому компьютеру АНПА. Осуществляют программно-управляемый поиск путем последовательного подключения и отключения технических средств поиска АНПА по результатам выполнения алгоритмов обнаружения и распознавания затонувших объектов с автоматическим перестроением маршрутов поиска.
Поисковый АНПА включает (фиг. 1): навигационную систему (1), систему ориентации АНПА (2), систему видеостабилизации АНПА (3) относительно видимых объектов на дне; датчик измерения оптических свойств воды (4); комбинированную поисковую систему затонувшего радиационного источника в составе технических средств: гидроакустического поиска (5), магнитометрического поиска (6), радиационного поиска (7), оптоэлектронной системы (8) с осветительной системой на основе лазерных осветителей и набором оптических фильтров; бортовой компьютер АНПА (9), включающий программные средства: (9.1) -для перестроения маршрутов обследования обнаруженного объекта и возврата на заданный маршрут с перестроением исходного маршрута с учетом оставшегося энергетического ресурса АНПА и ошибки навигации, (9.2) - обнаружения объекта по данным, поступающим от поисковых технических средств АНПА, (9.3) - распознавания объекта по данным, поступающим от поисковых технических средств АНПА с учетом их нечеткости, (9.4) - управления оптическими средствами поиска с выбором оптических фильтров и параметров системы освещения по результатам измерения датчика оптических свойств воды, (9.5) - управления движением АНПА; (10) - ЭНЗУ; (11) - средства связи с пунктом управления; (12) -движители.
В бортовой компьютер АНПА вводят программный код, обеспечивающий распознавание объекта по минимально необходимому набору характеристик, идентифицирующих радиационный источник (фиг. 2). При обнаружении с заданным уровнем достоверности совпадения характеристик обнаруженного объекта с характеристиками искомого радиационного источника, сохраненными в ЭНЗУ, система принимает решение о выполнении следующего этапа поиска.
Для распознавания по габаритным и визуальным характеристикам выделяют наиболее характерные фрактальные области затонувшего радиационного источника. Проводят расчет размеров фракталов изображений поверхностей радиационного источника и его габаритных характеристик известными способами, например, на основе квадро-дерева и квадратичной метрики, локальных фракталов или фрактальных сигнатур [8, 9].
В случае поиска затонувшего радиационного источника наличие аномального радиационного поля является наиболее информативной характеристикой. Поскольку для поисковых целей не требуется количественное определение значений радиационных факторов, в качестве индикатора наличия аномального радиационного поля может быть использована УФ камера, регистрирующая излучение в диапазоне волн 240-280 нм, с интерференционными фильтрами и лазерной подсветкой в голубом диапазоне, способ регистрации наличия ионизирующего излучения которой не зависит от типа и энергии ионизирующих частиц, места размещения и времени экспозиции блока детектирования, а также имеет более компактные массогабаритные характеристики по сравнению с погружными дозиметрическими или спектрометрическими блоками детектирования ионизирующих излучений. Активность ионизирующего излучения прямо пропорциональна яркости регистрируемого свечения в УФ диапазоне 240-280 нм. В качестве критерия распознавания объекта принимают кратность превышения яркости свечения над фоновым значением. Поскольку аномальное радиационное поле могут создавать техногенные радионуклиды, ранее поступившие в акваторию, оценить вероятность правильной идентификации исключительно по градиенту радиационного поля затруднительно.
Большинство техногенных радиационных источников обладает магнитным полем. Аномалия магнитного поля должна быть в 2-3 раза больше средней квадратической ошибки съемки [13]. Если исследуемая площадь находится в пределах десятков квадратных километров, то фоновое магнитное поле можно считать постоянным и равным полю на исходной точке. Наличие аномального по сравнению с фоновыми магнитным и радиационным полями в границах обнаруженного по акустическим изображениям объекта может свидетельствовать об обнаружении искомого радиационного источника.
Решение о переходе к следующему этапу поиска принимают по алгоритму распознавания радиационного источника с использованием нечеткой продукционной модели.
Алгоритм нечеткого вывода состоит в том, что [14]:
а) формируют правила вывода.
1 правило.
Если  то
то 
где у1 - выходная переменная;
В1 - нечеткое множество, определяющее принадлежность объекта к объекту поиска g1(y)∈[0, 1];
А11 - нечеткое множество относительных отклонений фрактальных размеров акустического изображения обнаруженного объекта от фрактальных размеров искомого объекта с функцией принадлежности f11(х) ∈ [0, 1].
x1 - входная переменная, среднее относительное отклонение фрактальных размеров радиационного источника и вычисленных по акустическим изображениям

где х11- вычисленный фрактальный размер габаритной характеристики по акустическим изображениям;
 наиболее близкий к xli фрактальный размер искомого радиационного источника:
наиболее близкий к xli фрактальный размер искомого радиационного источника:  где N - количество характеристик, идентифицирующих объект; на шагах i+1…n исключают из множества элементы, использованные в качестве идентифицирующих на шагах 1…i;
где N - количество характеристик, идентифицирующих объект; на шагах i+1…n исключают из множества элементы, использованные в качестве идентифицирующих на шагах 1…i;
n - количество выявленных габаритных характеристик.
Габаритные характеристики могут быть описаны аппроксимирующими контуры фигуры функциональными зависимостями с выделением совокупности примитивных геометрических фигур. В качестве размера фрактала принимают, например, отношение полуосей аппроксимирующих контуров объекта, отношение площадей выявленных геометрических примитивов и др.
2 правило.
Если 
где х21, х22 - входные параметры радиационного и магнитометрического обследования;
А21 - нечеткое множество величин радиационного поля, создаваемого искомым объектом с функцией принадлежности f21(x) ∈ [0, 1]. Радиационное поле, создаваемое аварийным источником, ограничено активностью источника в нормальных условиях эксплуатации и максимальной активностью источника при его разрушении;
А22 - нечеткое множество величин поля магнитной индукции, создаваемой искомым объектом с функцией принадлежности f22(x) ∈ [0, 1];
В - нечеткое множество, определяющее принадлежность объекта к объекту поиска g2(y) ∈ [0, 1].
В качестве входного параметра x21 принимают максимальную кратность превышения регистрируемого радиационного фактора (яркости снимка, активности) над фоновым значением по маршруту допоиска.
В качестве входного параметра х22 принимают максимум отклонения величины магнитной индукции от фоновых значений.
3 правило.
Если  то
то 
где у3 - выходная переменная;
В3 - нечеткое множество, определяющее принадлежность объекта к объекту поиска g3(y) ∈ [0, 1];
А31 - нечеткое множество отклонений фрактальных размеров фотоснимка обнаруженного объекта от фрактальных размеров искомого объекта с функцией принадлежности f31(x) ∈ [0, 1];
х3 - входная переменная, среднее относительное отклонение фрактальных размеров радиационного источника и размеров, вычисленных по фотоснимкам

где x3J - вычисленный фрактальный размер оптической характеристики по фотокадру;
 - наиболее близкий к x3j эталонный фрактальный размер затонувшего радиационного источника к вычисленному:
- наиболее близкий к x3j эталонный фрактальный размер затонувшего радиационного источника к вычисленному:  где М - количество характеристик, идентифицирующих объект; на шагах
где М - количество характеристик, идентифицирующих объект; на шагах  исключают из множества элементы, использованные в качестве идентифицирующих на шагах l…i;
исключают из множества элементы, использованные в качестве идентифицирующих на шагах l…i;
m - количество выявленных оптических характеристик;
В - нечеткое множество, определяющее принадлежность объекта к объекту поиска с функцией принадлежности g3(y) ∈ [0, 1].
Ошибка фрактального распознавания может составлять до 20% [8, 9]. В качестве входного параметра, например, может рассматриваться суммарная яркость изображения кадра. Для этого строят бинарное изображение, в котором для точек с яркостью меньше пороговой устанавливают значение 0, для остальных точек значение 1.
б) определяют функции принадлежности входных параметров множествам  и выходных параметров множествам
и выходных параметров множествам 
Четкое значение вывода есть величина:

где αi - максимум-конъюнкция степеней истинности предпосылок 

где n - количество входных параметров.
Если  где εi - требование достоверности распознавания объекта, система принимает решение о выполнении следующего этапа дообследования, в противном случае АНПА возвращают на первоначальный маршрут поиска к точке на пройденном участке на некотором расстоянии от точки начала выполнения дообследования обнаруженного объекта с учетом ошибки счисления пути.
где εi - требование достоверности распознавания объекта, система принимает решение о выполнении следующего этапа дообследования, в противном случае АНПА возвращают на первоначальный маршрут поиска к точке на пройденном участке на некотором расстоянии от точки начала выполнения дообследования обнаруженного объекта с учетом ошибки счисления пути.
Четкое значение вывода по совокупности этапов поиска получают по формуле

где m - количество этапов поиска.
Если |Y|>ε, система принимает решение о том, что найден объект поиска, посылает запрос на пункт управления о подтверждении окончания поиска, в противном случае АНПА возвращают на первоначальный маршрут поиска к точке на пройденном участке на некотором расстоянии от точки начала выполнения дообследования обнаруженного объекта с учетом ошибки счисления пути.
Функция принадлежности по фрактальным размерам может иметь вид сигмоиды (фиг. 3)

Функция принадлежности для измерений радиационного поля может иметь трапецеидальный вид (f2(х) на фиг. 4).
Функция принадлежности для измерений магнитометром имеет колоколообразную форму, поскольку значительные отклонения от идентифицирующих искомый объект характеристик могут свидетельствовать об обнаружении стороннего объекта. Такой функцией может быть, например, гауссова функция (фиг. 5),

где а, b - параметры функции принадлежности.
Функция принадлежности выходного параметра может иметь вид сигмоиды (фиг. 6)

Параметры распределений ai и bi, обеспечивающие достоверное распознавание могут быть определены посредством обучения нейронной сети, путем статистических розыгрышей на имитационной модели подводного поиска или экспертным путем.
Способ осуществляют следующим образом:
1. Устанавливают на АНПА поисковую аппаратуру в составе: средства гидроакустического поиска, например, гидролокатор бокового обзора или комбинация гидролокаторов бокового, прямого или секторного обзора; средство радиационного поиска, например УФ камера, регистрирующая излучение в диапазоне волн 240-280 нм с набором интерференционных фильтров и системы освещения на голубых диодах или ПГСМ; средства поиска ферромагнитных объектов, например магнитометр или градиентометр; оптические средства поиска, например, оптоэлектронные средства с лазерной системой освещения и набором фильтров.
2. В заданном районе формируют маршрут параллельными галсами. Межгалсовое расстояние определяют шириной полосы обзора применяемого гидроакустического средства. Протяженность маршрута рассчитывают исходя из времени непрерывной работы АНПА с учетом показателей энергопотребления бортового оборудования и расстояния до пункта управления.
3. В ЭНЗУ АНПА загружают поисковый маршрут, характеристики, идентифицирующие объект поиска: радиационного и магнитного полей, создаваемых радиационным источником, фрактальные размеры радиационного источника; определения нечетких множеств и параметры функций принадлежности входных переменных нечетким множествам. При наличии данных мониторинга затонувших объектов в районе поиска в ЭНЗУ могут быть введены данные о профиле дна и известных донных объектах техногенного происхождения.
4. В бортовой компьютер АНПА загружают (фиг. 1): программное обеспечение для перестроения маршрутов обследования обнаруженного объекта и возврата на заданный маршрут с перестроением исходного маршрута с учетом оставшегося энергетического ресурса АНПА и ошибки навигации (9.1), обнаружения объекта по данным, поступающим от поисковых технических средств АНПА (9.2), распознавания объекта по данным, поступающим от поисковых технических средств АНПА с учетом их нечеткости (9.3), управления оптическими средствами поиска с выбором оптических фильтров и параметров системы освещения по результатам измерения датчика оптических свойств воды (9.4), управления движением АНПА (9.5).
5. На границе района поиска осуществляют контрольные измерения радиационного фона и магнитного поля, для чего включают средства радиационного и магнитного поиска. Данные фоновых значений сохраняют в ЭНЗУ. Отключают средства радиационного и магнитного поиска. Возвращают АНПА на глубину поиска гидроакустическими средствами.
6. Подключают гидроакустические средства поиска. Направляют АНПА по заданному обзорно-поисковому маршруту. Данные гидроакустических средств передают на вход программного блока обнаружения объекта (9.2) по гидроакустическим сигналам и записывают их в ЭНЗУ. При обнаружении объекта данные передают в программный блок распознавания объекта (9.3). Вычисляют размер фракталов габаритных признаков известными способами. Программными средствами бортового компьютера АНПА проводят процедуру распознавания обнаруженного объекта с использованием правила 1 и функции принадлежности (6). С использованием данных навигационной системы АНПА определяют расстояние, координаты внешних границ и координату центра обнаруженного объекта и перестраивают маршрут АНПА для радиационного и магнитометрического поиска путем продольных перемещений аппарата носом-кормой с учетом направления течения от рассчитанных по сигналам гидроакустического средства границ обнаруженного объекта с некоторым запасом с учетом ширины поиска и габаритов обнаруженного объекта, ошибки определения габаритов по сигналам гидроакустического средства и ошибки счисления пути. Глубину погружения рассчитывают исходя из технических требований для средств радиационного и магнитного поиска
7. Отключают средства гидроакустического поиска. Подключают средства радиационного магнитного поиска. Данные измерений передают на вход программного блока обнаружения объекта (9.2) и записывают их в ЭНЗУ. По окончании обследования отключают средства радиационного и магнитного поиска. Программными средствами бортового компьютера определяют максимальный сигнал магнитной индукции и радиоактивности среды. Если выделенные сигналы отличаются от фонового, данные передают в блок распознавания (9.3).
8. В блоке распознавания по правилу 2 и функции принадлежности, например, вида (7), вычисляют выходной параметр по формуле (3) с использованием функции (8) и оценивают вероятность совпадения обнаруженного радиационного источника с искомым по совокупности данных гидроакустического, радиационного и магнитного поиска по формуле (5). При получении нечеткого вывода о распознавании объекта, как искомого радиационного источника, принимают решение о проведении сплошного обследования обнаруженного объекта оптоэлектронными средствами. При отрицательном выводе АНПА возвращают на первоначальный маршрут, точка возврата находится на пройденном участке на некотором расстоянии от точки начала выполнения поисковых работ средствами радиационного и магнитного поиска с учетом ошибки счисления пути, подключают гидроакустическе средства поиска.
9. Для проведения сплошного обследования обнаруженного объекта оптоэлектронными средствами рассчитывают глубину погружения по данным датчика оптических свойств воды (4). На глубине, достаточной для проведения обследования оптоэлектронными средствами, формируют маршрут путем продольных перемещений АНПА носом-кормой с учетом направления течения от рассчитанных по сигналам гидроакустических средств границ обнаруженного объекта с некоторым запасом с небольшой глубины на малой скорости.
10. Проведение обследования оптоэлектронными средствами проводят путем сплошного фото покрытия места и записывают данные в ЭНЗУ. Вычисляют размер фракталов яркости фотокадров в заданном масштабе известными способами. Проводят экспресс-распознавание объекта по алгоритмам фрактального кодирования и распознавания объектов. В блоке распознавания (9.3) по правилу 3 и заданным функциям принадлежности, например, вида (6), вычисляют выходной параметр по формуле (3) с использованием функции (8) и оценивают степень совпадения характеристик обнаруженного радиационного источника с характеристиками, идентифицирующими искомый радиационный источник по совокупности всех этапов поиска по формуле (5). При совпадении фрактальных размеров с эталонными, в совокупности габаритных, радиационных и магнитных характеристик обнаруженного объекта, передают результаты поиска и запрос о подтверждении окончания поиска на пункт управления АНПА по доступному каналу связи (гидроакустическому или при всплытии на поверхность по радиоканалу).
В случае отрицательного вывода об обнаруженном объекте АНПА возвращают на первоначальный маршрут, точка возврата находится на пройденном участке на некотором расстоянии от точки начала выполнения поисковых работ средствами радиационного и магнитного поиска с учетом ошибки счисления пути, подключают гидроакустические средства поиска.
11. По окончании поисковых работ на пункте управления осуществляют анализ данных обследования оптоэлектронными средствами, проводят экспертную оценку данных, записанных в ЭНЗУ АНПА, и принимают решение о дальнейших действиях по поиску и обращению с затонувшим радиационным источником.
Соответствие критерию «новизна».
Предлагаемое техническое решение является новым, поскольку известные способы поиска затонувшего радиационного источника не позволяют осуществлять поиск путем программно-управляемого поэтапного его обнаружения комбинацией технических средств, основанных на различных физических принципах регистрации параметров состояния окружающей среды, и распознавание с использованием алгоритмов нечеткого вывода.
Соответствие критерию «изобретательский уровень».
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленные способы поиска затонувшего радиационного источника позволяют автоматически управлять техническими поисковыми средствами по мере обнаружения и распознавания объектов на дне обследуемой акватории.
Соответствие критерию «промышленная применимость».
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы серийно выпускаемые АНПА среднего класса, гидроакустические, магнитометрические и оптоэлектронные системы, системы подводного освещения, погружные средства радиационного поиска и одноплатные компьютеры.
Реализация способа.
Для примера реализации способа приняты следующие эталонные значения для искомого радиационного источника:
- отклонение магнитной индукции от фонового поля не менее 1,08 и не более 1,15 раза;
- превышение яркости свечения в УФ диапазоне 240-280 нм над фоном в воде при нормальных условиях не менее чем в 2 раза, при аварийном поступлении радиоактивных веществ в воду не более чем в 22 раза.
Для примера реализации способа приняты следующие входные данные по результатам обследования (поиска):
- среднее относительное отклонение фрактальных размеров искомого радиационного источника и вычисленных по акустическим изображениям обнаруженного объекта - 0,4;
- превышение яркости свечения обнаруженного объекта в УФ диапазоне 240-280 нм в воде над фоновым значением - 1,5 раза;
- отклонение магнитной индукции обнаруженного объекта от фонового поля -1,1 раза;
- среднее относительное отклонение фрактальных размеров искомого радиационного источника и вычисленных по фотоснимкам - 0,2.
Критерии принятия решения:
ε1=0,5 порог принятия решения о дообследовании по результатам распознавания на промежуточных этапах поиска;
ε2=0,7 порог принятия решения о запросе об окончании поиска по результатам распознавания на финальном этапе поиска путем сплошного фотопокрытия.
В алгоритме распознавания объекта поиска используют функции принадлежности нечетким множествам, построенные по функциям (6)-(8) и представленные на фиг. 3.
По функциям принадлежности вычисляют значения

Бортовой компьютер АНПА запускает программу дообследования обнаруженного объекта по наличию радиационного и магнитного полей.
По функциям принадлежности вычисляют значения:

Вычисляют значение 
По формуле (3) рассчитывают значение выходной переменной:

Бортовой компьютер запускает программу сплошного фото покрытия.
По функциям принадлежности вычисляют значения:

По формуле (3) рассчитывают значение выходной переменной

Бортовой компьютер АНПА по доступному каналу связи направляет запрос на пункт управления о подтверждении окончания поиска. Технико-экономическая эффективность.
Реализация предлагаемого способа позволит экономично использовать энергетические ресурсы АНПА, увеличить обследуемую одним АНПА площадь акватории, повысить точность и надежность поиска затонувшего радиационного источника.
Список литературы
1. Анистратенко С.С., Гареев Г.З., Кузнецова Е.Ю. Обнаружение и идентификация радионуклидов под водой // Морские интеллектуальные технологии. - 2020. - №3. - т. 1. - С. 155-163.
2. Нерсесов Б.А. Особенности поиска подводных потенциально опасных объектов в Балтийском море // Науки о земле. - 2017. - №11 - С. 270-275.
3. Соколов Н.А., Рынков А.В. Повышение поисковых возможностей автономных необитаемых подводных аппаратов за счет применения многоканальных магнитометрических систем // Известия Южного Федерального университета. - 2021. - №1(218). - С. 59-72.
4. Казеннов А.Ю., Талонов И.А.. Пименов А.Е. Методика оперативных радиационных обследований акваторий береговых баз флота с помощью погружных гамма-спектрометров // Атомная энергия. - 2010. - Т. 109. - Вып. 2. - С. 100-108.
5. Андреюк Р.А., Шиянов А.С., Богачев Ю.А., Попко А.О. Использование совмещенного гидролокатора секторного обзора и многолучевого эхолота для нужд охраны водного района // Морской вестник. - 2013. - №1(45). - С. 33-34.
6. Мартынов В.Л., Краснопольский В.Е., Мальцев А.Б. Стробирующие лазерные телевизионные системы для подводных аппаратов // Судостроение - 2005. - №4. - С. 46-48.
7. Инзарцев А.В., Киселев Л.В., Костенко В.В., Матвиенко Ю.В., Павин A.M., Щербатюк А.Ф. Подводные робототехнические комплексы: системы, технологии, применение / - Владивосток: Дальнаука, 2018. - 386 с.
8. Аксяитов М.Х., Егорова Е.В., Рыбаков А.Н. Программное обеспечение и математическая реализация фрактального распознавания искусственных и природных объектов // Технические науки: теория и практика: материалы IV Межд. науч. конфр. (Казань, ноябрь, 2018 г. ) -Казань: Молодой ученый, 2018 - С. 1-6 - URL: http://moluch.ru/conf/tech/ arhive/312/14554 (дата обращ. 10.11.2022.) - Режим доступа: свободный. - Текст: электронный.
9. Гулаков В.К., Клепинин С.Б. Использование локализованных фракталов для кодирования и распознавания изображений // Вестник Брянского ГТУ. - 2014. - №3(43). - С. 108-113.
Ю.Илларионов Г.Ю., Сидоренко В.В., Смирнов С.В. Автономные необитаемые подводные аппараты для поиска и уничтожения мин // Зарубежное обозрение. - 2006. - №1. - С. 31-39.
11. Платовских Ю.А., Сергеев И.В. Перенос радионуклидов в бухте после радиационной аварии // Атомная энергия. - 2004. - Т.97 вып. 1. - С. 74-78.
12. Инзарцев А.В., Павин A.M., Лебедко О.А., Панин М.А. Распознавание и обследование малоразмерных подводных объектов с помощью автономных необитаемых подводных аппаратов // Подводные исследования и робототехника. - 2016. - №2 (22). - С. 36-43.
13. Барашок П.И., Фирсов Ю.Г. Современные способы обследования морского дна для обнаружения и устранения взрывоопасных объектов до строительства трубопровода // Вестник государственного университета морского и речного флота им. ад. СО. Макарова. - 2016. - Вып. 1 (35) - С. 47-59.
14. Борисов В.В., Круглов В.В., Федулов А.С. Нечеткие модели и сети. - Изд 2-е. стереотип. - М.: Горячая линия-Телеком, 2019. - 284 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
Изобретение относится к области поиска затонувшего радиационного источника и может быть использовано для поиска затонувших в море радиационных источников автономным необитаемым подводным аппаратом (АНПА). Сущность: осуществляют комбинированный поиск радиационного источника техническими средствами АНПА, включающими гидроакустическую, радиационную, магнитометрическую, оптоэлектронную аппаратуру, бортовой компьютер, производят поиск, последовательно подключая и отключая технические средства, основанные на различных физических принципах обнаружения радиационного источника, в качестве средства радиационного поиска используют ультрафиолетовую камеру, регистрирующую излучение в диапазоне волн 240-280 нм, технические средства, обладающие более низкой производительностью, подключают после получения положительных результатов поиска более производительными техническими средствами, решение о переходе к следующему этапу поиска или возвращении на первоначальный маршрут поиска осуществляют по алгоритму нечеткого вывода распознавания радиационного источника и алгоритмов фрактального кодирования и распознавания объектов по фото и гидроакустическим изображениям, при положительном выводе об обнаруженном объекте по совокупности всех этапов поиска посылают запрос об подтверждении окончания поиска на пункт управления АНПА по доступному каналу связи. Технический результат: автоматическое управление техническими поисковыми средствами АНПА и экономичное использование энергетических ресурсов АНПА в процессе поиска РИ. 2 з.п. ф-лы, 6 ил.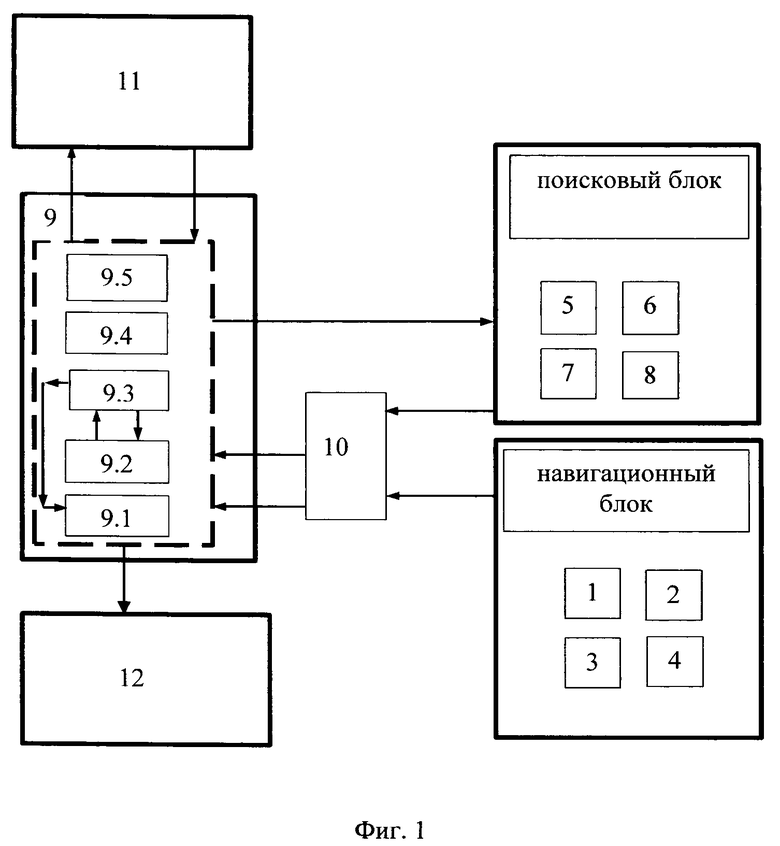
1. Способ поиска затонувшего источника ионизирующего излучения автономным необитаемым подводным аппаратом (АНПА), который оснащают гидроакустической, радиационной, магнитометрической, оптоэлектронной аппаратурой, бортовым компьютером и направляют по заданной траектории для обследования гидроакустическим средством, акустические изображения в реальном времени обрабатывают бортовым компьютером, при обнаружении и распознавании объекта автоматически перепланируют маршрут поиска для выполнения дообследования найденного объекта и его окрестности с запасом на малой скорости с учетом направления течения путем продольных перемещений аппарата носом-кормой, после окончания дообследования АНПА автоматически возвращают на первоначальный маршрут поиска к точке на пройденном участке на расстоянии от точки начала выполнения дообследования обнаруженного объекта с учетом ошибки счисления пути, отличающийся тем, что бортовым компьютером АНПА в соответствии с алгоритмом обнаружения и распознавания обнаруженных объектов осуществляют управление поиском радиационного источника путем последовательного подключения и отключения технических средств поиска радиационного источника, основанных на физических принципах регистрации параметров состояния окружающей среды; технические средства, обладающие более низкой производительностью, подключают и отключают последовательно после получения положительных результатов поиска более производительными техническими средствами в три этапа - гидроакустический поиск, одновременно радиационный и ферромагнитный поиск, поиск оптоэлектронными средствами; решение о переходе к следующему этапу поиска или возвращении на первоначальный маршрут поиска осуществляют по алгоритму нечеткого вывода о распознавании обнаруженного объекта как искомого радиационного источника по совокупности данных, полученных от технических средств на пройденных этапах поиска; при получении нечеткого вывода об обнаруженном объекте по совокупности всех этапов поиска посылают запрос об подтверждении окончания поиска на пункт управления АНПА по доступному каналу связи; четкий вывод об обнаруженных объектах получают по результатам распознавания данных с энергонезависимого запоминающего устройства АНПА на пункте управления.
2. Способ по п. 1, отличающийся тем, что распознавание обнаруженного объекта по визуальным и габаритным характеристикам осуществляют программным обеспечением бортового компьютера АНПА по алгоритмам фрактального кодирования и распознавания фото и акустических изображений.
3. Способ по п. 1, отличающийся тем, что в качестве средства радиационного поиска используют ультрафиолетовую камеру, регистрирующую излучение в диапазоне волн 240-280 нм; бортовым компьютером по специальным алгоритмам выделяют наиболее яркий кадр в диапазоне волн 240-280 нм, в качестве входного параметра алгоритма нечеткого вывода рассчитывают отношение максимумов яркости кадров в диапазоне волн 240-280 нм на маршруте дообследования и контрольных кадров фоновых значений.
| Инзарцев А.В., Киселев Л.В., Костенко В.В., Матвиенко Ю.В., Павин A.M., Щербатюк А.Ф | |||
| Подводные робототехнические комплексы: системы, технологии, применение | |||
| - Владивосток: Дальнаука, 2018 | |||
| Счетная бухгалтерская линейка | 1922 |
|
SU386A1 |
| С.С | |||
| Анистратенко и др | |||
| ОБНАРУЖЕНИЕ И ИДЕНТИФИКАЦИЯ РАДИОНУКЛИДОВ ПОД ВОДОЙ, журнал МОРСКИЕ ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ, номер 3-1 (49), 2020, стр | |||

