Изобретение относится к области амфибийного транспорта и может использоваться для решения задач, связанных с повышением безопасности взлетно-посадочных действий магистральных самолетов-амфибий. Задача изобретения достигается за счет осуществления гидроакустического мониторинга водного объема летного бассейна гидроаэродрома с помощью донных приемоизлучающих антенных устройств полусферической формы. Гидроакустический мониторинг водного объема с помощью ультразвуковых волн осуществляется для оперативного и дистанционного обнаружения, определения координат и характеристик движения потенциально опасных притопленных объектов нейтральной плавучести, находящихся в приповерхностном слое взлетно-посадочной полосы; а также измерения таких динамически изменяющихся характеристик летного бассейна как глубины, состояние водной поверхности: - высота, скорость и направление движения ветровых волн, а также направление течения водных масс в различных точках акватории, что в совокупности позволит береговой гидроакустической службе своевременно иметь достаточный объем информации о подводной обстановке и состоянии водной поверхности, на основании которой принимается то ли иное решение, сообщаемое по радиоканалу на борт экипажам как судна на воздушной подушке, осуществляющему осмотр акватории поверхности летного бассейна, так и гидросамолета, готовящего к выполнению взлетно-посадочных операций.
Преимущественная область использования - системы обеспечения безопасной эксплуатации внутренней и шельфовой водной транспортной системы России - естественных и искусственных водоемов: рек, озер, водохранилищ, морского шельфа, составляющих ее, в частности, для обеспечения безопасности взлета и приводнения гидросамолета на акватории летного бассейна гидроаэродрома при осуществлении амфибийной транспортной деятельности.
В качестве первого аналога выбран способ (см. патент США №2692101, кл. B64F 1/00, 1954), целью которого является повышение безопасности взлетно-посадочных мероприятий. Так, легкие гидросамолеты снабжают лыжами, а для взлета и посадки предлагается использовать притопленные плавучие взлетно-посадочные платформы необходимых геометрических размеров, которые могут разворачиваться по поверхности воды, обеспечивая взлет и посадку против ветра. Контроль чистоты водной поверхности взлетно-посадочной полосы от опасных для приводнения и взлета предметов включает в себя лишь визуальный осмотр. Плавучие платформы имеют существенные ограничения как по массогабаритным показателям гидросамолетов, так и безопасности исполнения взлетно-посадочных действий, являясь, по сути, плавучей взлетно-посадочной полосой аэродрома, и принципиально не пригодны к использованию для современных магистральных днищевых гидросамолетов, так как исключают контакт корпуса снизившегося днищевого гидросамолета с водной средой, что необходимо, например, для заполнения пожарных резервуаров водой по ходу движения (для гидросамолета А-200 «Альбатрос» на скорости около 200 км/ч). Гидроакустический контроль водного объема летного бассейна, существующий на сегодняшний день службы обеспечения функционирования гидроаэродрома, не осуществляют, отсутствуют специализированные как гидроакустическая аппаратура для этих целей, так и надежные способы проведения ближнего подводного наблюдения в мелководных водоемах.
Причинами, препятствующими достижению заявляемого технического результата, является отсутствие проведения гидроакустического эхопоиска притопленных и, соответственно, визуально не обнаруживаемых объектов в пределах водного объема взлетно-посадочной полосы, что снижает безопасность проведения взлета и приводнения гидросамолетов.
Признаки, совпадающие с заявляемым способом: определение положения взлетно-посадочной полосы по направлению ветра, проведение визуального осмотра водной поверхности.
В качестве второго аналога выбран способ, включающий операции определения положения взлетно-посадочной полосы по направлению ветра и установку маркерных знаков на открытых морских акваториях (см. «Инженерно-авиационная служба и эксплуатация летательных аппаратов», Н.Н.Андреев и др., М.: изд-во ВВИА им. Жуковского Н.Е., 1970, с.276-280), в котором, однако, не предусмотрено применение как гидроакустического эхопоиска притопленных объектов в пределах взлетно-посадочной полосы, так и специальных плавсредств для осуществления осмотра и очистки мелководной части акватории летного бассейна. В результате данный способ не обеспечивает должный уровень безопасности при маневрах гидросамолета как в водоизмещающем, так и глиссирующем режимах на акватории летного бассейна гидроаэродрома.
Причинами, препятствующими достижению заявляемого технического результата, является отсутствие проведения гидроакустического эхопоиска притопленных и, соответственно, визуально не обнаруживаемых объектов в пределах водного объема взлетно-посадочной полосы, что снижает безопасность проведения взлета и приводнения гидросамолетов.
Признаки, совпадающие с заявляемым способом: определение положения взлетно-посадочной полосы по направлению ветра, установка маркерных знаков на акватории, проведение визуального осмотра водной поверхности.
В качестве прототипа выбран «Способ подготовки гидроаэродромов для выполнения взлета и посадки гидросамолетов» (см. патент РФ №2093428, кл. B64F 1/00, опубл. 20.10.1997), заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют положение взлетно-посадочной полосы как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж СВП производит установку маркерных знаков, в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости
Однако, если оснащение амфибийного транспортного средства радионавигационным оборудованием, в частности, радиолокатором, глиссадными и курсовыми радиомаяками, способствует безопасности проведения взлетно-посадочных мероприятий, то размещение гидроакустической аппаратуры - гидролокатора не может обеспечить эффективный эхопоиск притопленных объектов на акватории в силу целого ряда рассмотренных ниже причин. Для обнаружения притопленных объектов с помощью гидролокатора в водной среде на пути перемещения гидросамолета по акватории используется импульсный метод определения дистанции и амплитудный метод пеленгования (см. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.25-38). Гидролокатор, установленный на СВП, является однопозиционной системой определения местоположения подводных объектов, в связи с чем жесткие требования предъявляются к остроте направленного действия и уровню бокового поля используемых гидроакустических антенн. Действительно, и схема импульсного измерения расстояния до цели, и определение направления на цель путем поворота основного лепестка характеристики направленности антенны в плоскости пеленгования предполагает проведение измерений в безграничной среде, в то время как необходимо достоверно обнаруживать притопленные объекты «опасно» расположенные вблизи протяженной границы раздела «вода-воздух» при геометрических размерах (длина ~2500 м, ширина ~200 м, глубина ~ от 3 м до 6 м) обследуемого приповерхностного аэрированного водного слоя взлетно-посадочной полосы, что обусловит появление маскирующих отражений и индикацию на дисплее «ложных» целей.
Рассмотрим причины неэффективности осуществления гидроакустического эхопоиска притопленных объектов в водном объеме взлетно-посадочной полосы непосредственно с борта СВП в способе-прототипе:
1) интерференционная антенна гидролокатора обладает протяженной ближней «прожекторной» зоной дифракции
 ,
,
где k=2π/λ=ω/c - волновое число, λ, ω=2π·f - длина волны и циклическая частота ультразвукового зондирующего сигнала, a - размер апертуры (полуширина, радиус) излучателя (см. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986, с.92-112). В пределах ближней «прожекторной» зоны дифракции как осевое, так и угловое распределения амплитуды звукового давления рабочего ультразвукового сигнала испытывают значительные флуктуации, в результате чего результативность горизонтального «ближнего» эхопоиска притопленных объектов будет крайне низка. Это обусловлено значительными уровнями эхосигналов от границ раздела «вода-воздух», «вода-дно», регистрируемых как в направлениях основного, так и боковых лепестков характеристики направленности, что в сочетании с граничной реверберацией приводит к невозможности регистрации полезных отражений от объектов поиска. Эффективность использования гидролокаторов в значительной степени зависит от величины боковых лепестков характеристики направленности интерференционной антенны: прием и регистрация эхосигнала от объекта, находящегося на направлении бокового лепестка, приводит к регистрации «ложной» цели на акустической оси и, соответственно, возникновению ошибки в определении угловых координат. Уровни боковых лепестков характеристики направленности зависят от волновых размеров и формы антенны, а также закона распределения амплитуд возбуждения вдоль излучающей поверхности. Так, расчетные уровни первого и второго боковых лепестков характеристики направленности плоской поршневой антенны с круглой апертурой составляют 13% и 6% (по давлению), а соотношения для расчета их направлений имеют вид
 и
и 
соответственно (см. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. - 2-е изд., перераб. и доп. - Л.: Судостроение, 1988. - с.5-66);
2) при первичной обработке затруднено выделение эхосигналов от объектов на фоне поверхностной и объемной реверберации вследствие малости их классификационных различий (частота, длительность, амплитуда, корреляционные характеристики);
3) СВП является источником как интенсивных акустических шумов и помех, так и аэрации приповерхностного водного слоя непосредственно в месте установки интерференционной приемоизлучающей антенны гидролокатора, что ухудшает отношение «сигнал-помеха», снижает эффективность излучения и приема ультразвука за счет экранировки пеленой воздушных пузырьков;
4) ввиду малого водоизмещения СВП в большой степени подвержено качке, что в отсутствии стабилизации в пространстве положения главного максимума характеристики направленности интерференционной антенны гидролокатора отрицательно скажется на уверенной регистрации эхосигналов от объектов поиска, в определенной степени удовлетворительно решая лишь задачу регистрации глубин акватории в режиме эхолотирования;
5) для просмотра заданной части водного объема приповерхностного слоя взлетно-посадочной полосы, а также определения азимутального и курсового углов обнаруженного объекта, интерференционная антенна гидролокатора должна механическим способом опускаться на достаточную глубину, поворачиваться в вертикальной и горизонтальной плоскостях, причем, любое заглубленное расположение антенны в данных условиях поиска не является оптимальным, так как эффективное обнаружение приповерхностных объектов «на фоне» границы раздела «вода-воздух» возможно при излучении антенной ультразвуковых сигналов в направлении «снизу вверх»;
6) в силу узкополосности резонансных электроакустических преобразователей интерференционных антенн эхопоиск притопленных объектов, обладающих различной отражательной способностью, проводится в малом частотном диапазоне ультразвуковых сигналов, причем, при осуществлении эхопоиска на мелководной акватории с помощью нескольких СВП с однотипными гидролокаторами задача обнаружения объектов будет осложнена помехами взаимного влияния;
7) гидроакустический контроль водного объема летного бассейна гидроаэродрома как одна из операций по обеспечению взлетно-посадочных действий производится эпизодически, а не на постоянной основе, что дает возможность скрытной установки различных донных устройств, имеющих целью нанесение материального ущерба и повреждений гидросамолету.
В результате важная операция способа подготовки гидроаэродрома - гидроакустический эхопоиск притопленных объектов в водном объеме взлетно-посадочной полосы не может быть результативно произведен непосредственно с борта СВП, что снижает безопасность взлетно-посадочных действий.
Рассмотрим подробно пример низкоэффективного эхопоиска с борта надводного плавательного средства в специфических условиях мелководья. Известен опыт применения эхотрала гидролокатора для обнаружения подводных препятствий, определения их координат в условиях мелководья на дистанциях до 50 метров, используемый для траления с борта надводного судна с целью проверки чистоты судовых ходов и выявления на них опасных для судоходства подводных объектов (см. Гидролокаторы ближнего действия. А.Н.Яковлев, Г.П.Каблов. Л.: Судостроение, 1983. С.174-178). Возникновение опасных для судоходства подводных объектов связано с естественным процессом изменения русла, а также обусловлено возможностью текущей замусоренности водных путей случайными объектами, например, затонувшими бревнами и т.п. Различают - сплошное траление (проводится в установленные сроки навигации в границах всей судоходной полосы) и местное (осуществляется на наиболее опасных участках - порогах, перекатах, подходах к причалам и т.п. с целью оперативного поиска притопленных объектов), причем, проведение осмотра подводной обстановки в обоих случаях осуществляется с борта судна-носителя. В процессе испытаний и эксплуатации эхотрала применялись различные конструкции интерференционной антенны: перископическая, рупорная и так называемая "косекансная", причем, последняя конструкция приемоизлучающей антенны, по мнению разработчиков, обеспечивала формирование характеристики направленности излучения с малым уровнем бокового поля в угломестной плоскости вниз по направлению ко дну.
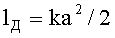
Активный элемент "косекансной" интерференционной антенны состоял из четырех электроакустических преобразователей, имеющих различные пространственные характеристики излучения, акустические поля которых в результате суперпозиции колебательных процессов в среде лоцирования и создавали желаемую форму характеристики направленности (фиг.1). Следует отметить, что формирование характеристики направленности интерференционной антенны с малым уровнем бокового поля в угломестной плоскости вниз по направлению ко дну привело к недопустимому увеличению уровня излучения бокового поля в той же плоскости вверх по направлению к водной поверхности. Так, при использовании рабочей частоты излучения 525 кГц электроакустический преобразователь формировал ультразвуковое поле со следующими характеристиками в угломестной плоскости - ширина основного лепестка характеристики направленности по уровню 0,9 θ0,9 B ~4°, первый боковой лепесток в направлении (5°) от горизонта с уровнем (-1,4 дБ), второй боковой лепесток в направлении (7°) от горизонта с уровнем (-3,7 дБ), третий боковой лепесток в направлении (10°) от горизонта с уровнем (-9 дБ); четвертый боковой лепесток в направлении (30°) от горизонта с уровнем (-20 дБ). Водная поверхность является границей раздела, для которой акустические сопротивления воздушной и водной сред (воздух - ZВОЗД=442 кг/м2×с; вода - ZВОД=1,5×106 кг/м2×c) настолько сильно различаются, что вся энергия акустической волны, падающей снизу на поверхность, возвращается в воду, что вызывало появление интенсивной маскирующей реверберационной помехи на всех дистанциях эхопоиска.
При данных параметрах интерференционной антенны закономерны выводы, которые сделали сами разработчики после проведения испытаний: «В условиях ограниченной глубины в русле реки (~4 м) и заглублении излучателя (от 0,5 м до 2,4 м) импульс звука не мог пройти расстояния более 30 м, не испытав отражений от поверхности воды или дна; в некоторых случаях эти отражения вызывали интенсивную помеху на индикаторе. …. Незначительная часть звуковых импульсов распространялась с отражением от водной поверхности и от дна на всем протяжении, начиная от самого излучателя. …. Для устранения реверберационной помехи на индикаторе начало развертки искусственно задерживалось, хотя при этом исключалась возможность обнаружения подводных препятствий в радиусе вокруг излучателя около 3 м. …. Изображение на экране индикатора препятствия с малыми размерами (эхо от буя) вызывало утроение отметки, обусловленное боковыми лепестками характеристики направленности антенны…».
Причинами, препятствующими достижению заявляемого технического результата, является отсутствие эффективности проведения с борта судна на воздушной подушке гидроакустического эхопоиска притопленных и, соответственно, визуально не обнаруживаемых объектов в пределах водного объема взлетно-посадочной полосы, что снижает безопасность проведения взлета и приводнения гидросамолетов.
Признаки, совпадающие с заявляемым способом: определение в пределах летного бассейна гидроаэродрома положения взлетно-посадочной полосы как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж судна на воздушной подушке производит установку маркерных знаков, в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту судна на воздушной подушке размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости.
Задачей изобретения является повышение безопасности взлетно-посадочных действий. Задача обеспечивается за счет размещения вдоль осей взлетно-посадочных полос летного бассейна гидроаэродрома донных приемоизлучающих антенных устройств полусферической формы, обеспечивающих квантованный по направлению ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях (см. Многочастотное гидроакустическое приемоизлучающее антенное устройство // Положительное решение от 24.01.2011 г. о выдаче патента на полезную модель по заявке №2010149910/28 (072080) авторов Волощенко В.Ю., Волощенко А.П.).
Технический результат изобретения заключается в получении уточненной информации в широкой полосе рабочих частот как о обнаруженных целях и характеристиках их движения (пеленг, дальность, скорость), так и о общей обстановке на акватории (глубина, направление и скорость течения водных масс, высота, скорость и направление движения ветровых волн, толщина льда и т.д.), что позволит повысить безопасность взлетно-посадочных действий на мелководной акватории.
Технический результат достигается тем, что в способ подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета, заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют положение взлетно-посадочной полосы как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж судна на воздушной подушке производит установку маркерных знаков, в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту судна на воздушной подушке размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости, дополнительно введены следующие операции:
размещение в пределах летного бассейна гидроаэродрома вдоль осей взлетно-посадочных полос донных приемоизлучающих антенных устройств полусферической формы, обеспечивающих квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях (см. Многочастотное гидроакустическое приемоизлучающее антенное устройство // Положительное решение от 24.01.2011 г. о выдаче патента на полезную модель по заявке №2010149910/28 (072080) авторов Волощенко В.Ю., Волощенко А.П.);
соединение приемоизлучающих антенных устройств кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне, что исключает помехи взаимного влияния соседних донных антенных устройств;
осуществление операторами береговой гидроакустической службы различных видов подводного мониторинга: - ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; - текущий эхопоиск на периметре летного бассейна гидроаэродрома; - режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома и т.д., причем, перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года;
одновременное использование соседних донных антенных устройств полусферической формы дает дополнительную возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн), границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна;
на основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как судна на воздушной подушке, осуществляющему описанные выше действия, так и гидросамолета, готовящегося к выполнению взлетно-посадочных операций.
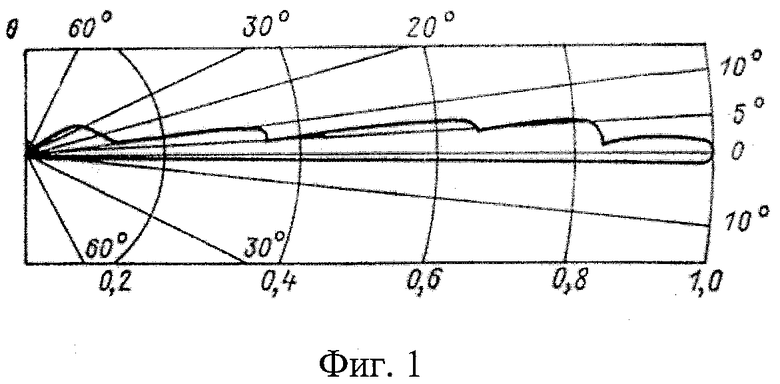
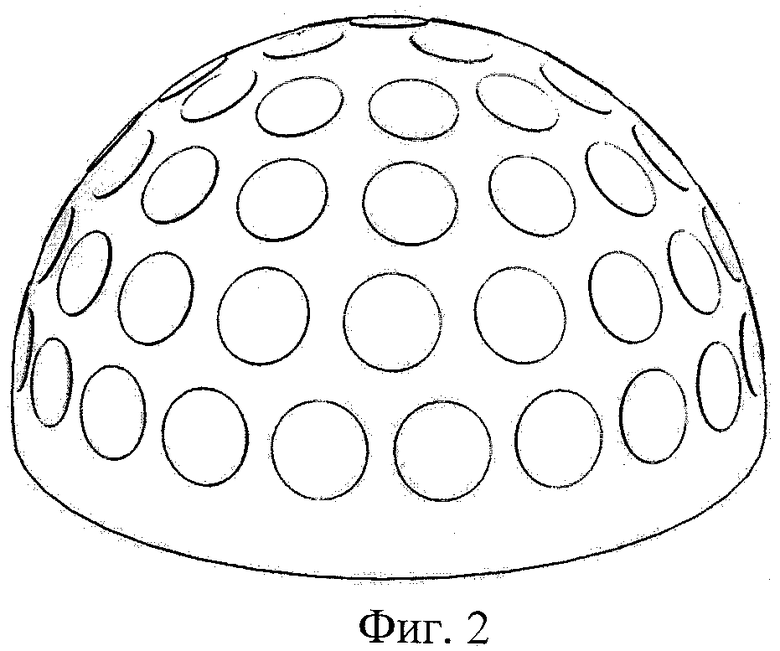
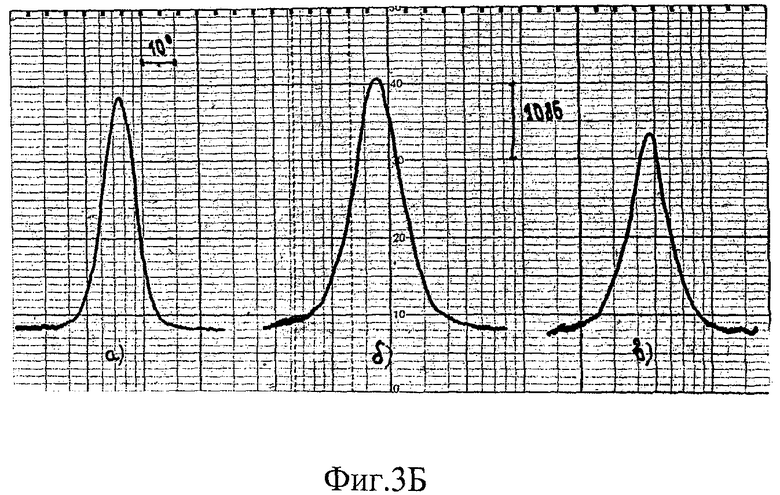
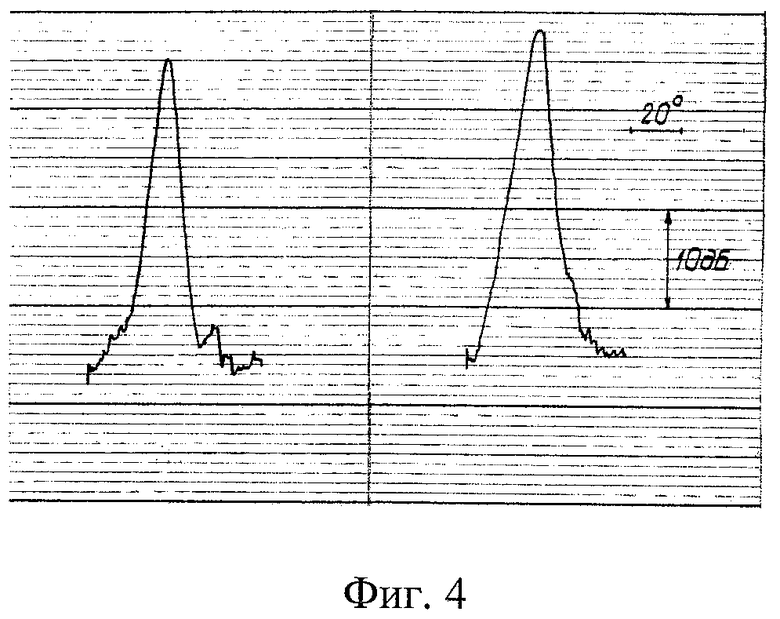
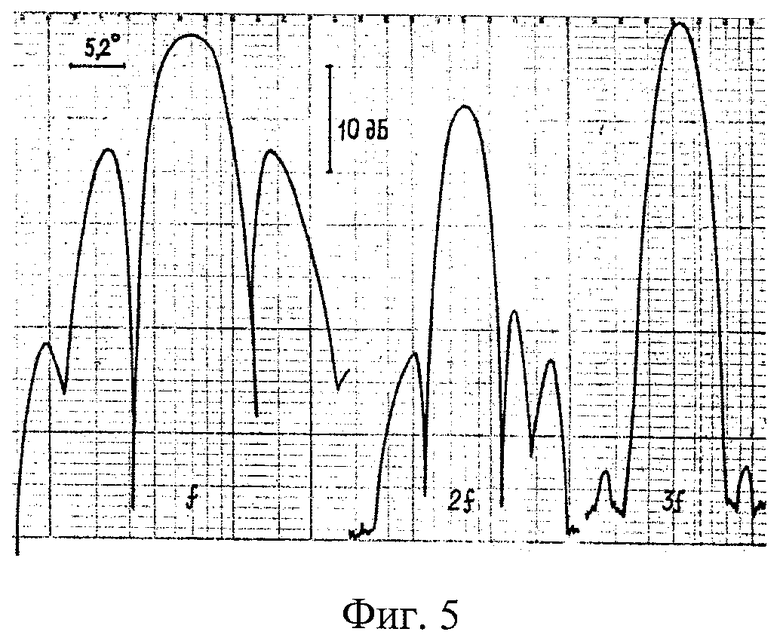
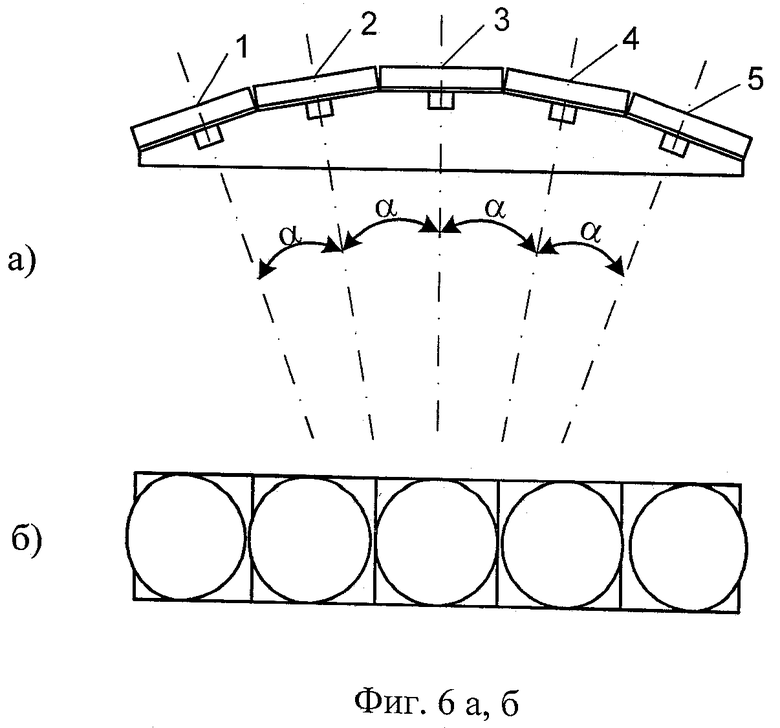
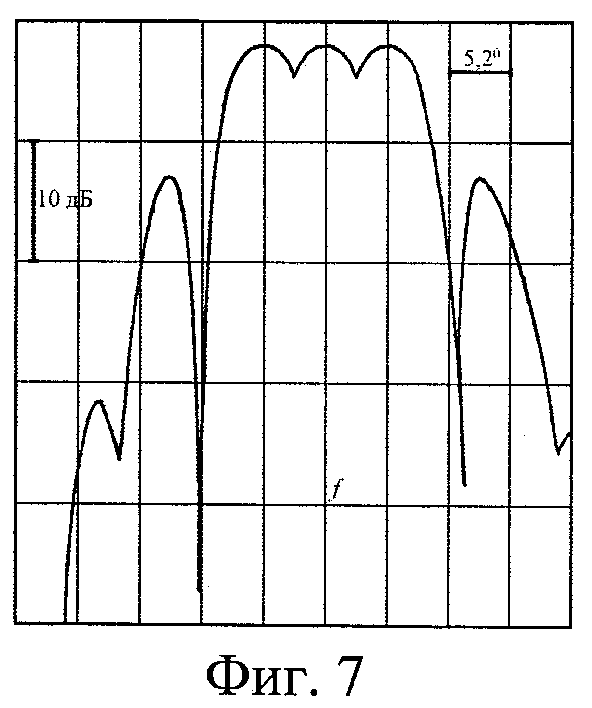
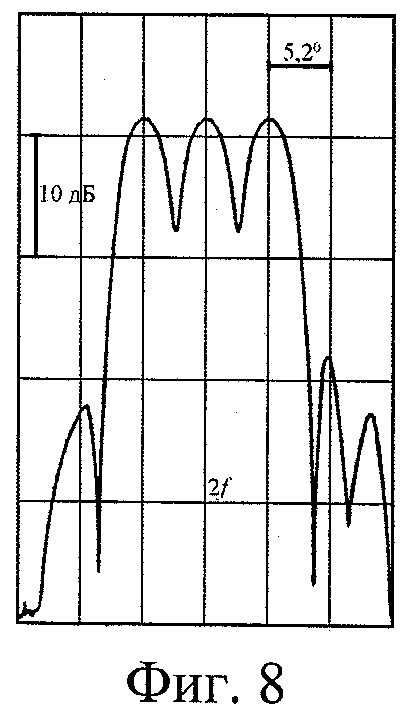
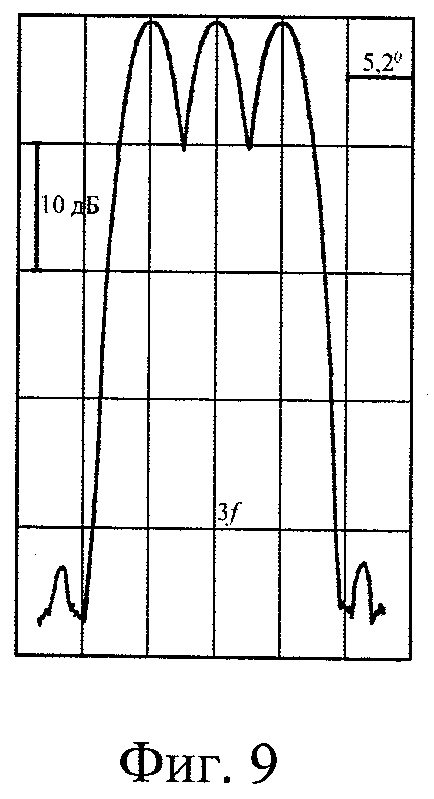
На фиг.1 приведена форма характеристики направленности «косекансной» интерференционной антенны (см. Гидролокаторы ближнего действия. А.Н.Яковлев, Г.П.Каблов. Л.: Судостроение, 1983. С.174-178), на фиг.2 - конструкция многочастотного донного приемоизлучающего антенного устройства; на фиг.3А, Б представлены экспериментальные характеристики направленности квадратного (80 мм×80 мм) электроакустического преобразователя параметрической антенны: для волны накачки (А) с частотой 230 кГц и формирующихся в водной среде сигналов нескольких разностных (Б) частот - 40, 20 и 2,5 кГц (а, б, в соответственно); на фиг.4 представлены экспериментальные характеристики направленности двух однотипных параметрических антенн с круглыми (диаметр 65 мм) электроакустическими преобразователями накачки для формирующегося в водной среде сигнала разностной частоты F=50 кГц; на фиг.5 представлены экспериментально измеренные в условиях гидроакустического бассейна характеристики направленности электроакустического преобразователя накачки параметрической антенны для сигнала накачки частоты f=270 кГц и формирующихся в нелинейной водной среде высших гармонических компонент 2f=540 кГц, 3f=810 кГц; на фиг.6а, б - две проекции конфигурации макета участка полосы наибольшего периметра приемоизлучающего антенного устройства, который изготовлен на основе пяти электроакустических преобразователей накачки; на фиг.7, 8, 9 - секторные характеристики направленности макета в азимутальной плоскости: для сигнала накачки f=270 кГц, для второй гармоники сигнала накачки 2f=540 кГц, для третьей гармоники сигнала накачки 3f=810 кГц; на фиг.10 - секторная характеристики направленности макета в азимутальной плоскости для сигнала разностной частоты F=50 кГц; на фиг.11 - схема размещения приемоизлучающих антенных устройств на дне акватории летного бассейна гидроаэродрома в масштабе «1 клетка-100 метров».
Развитие и экономически обоснованная эксплуатация амфибийной транспортной системы (см. Соколянский В.П., Морозов В.П., Долгополов А.А., Захарченко Ю.А. Амфибийная летательная и транспортная техника для труднодоступных регионов России / Сб. докладов VII научной конференции по гидроавиации «Гидроавиасалон-2008». - М.: ЦАГИ, 2008, ч.1, с.10-17) требует стабильности и безопасности функционирования сети гидроаэродромов базирования амфибийной летательной и транспортной техники. Долговременное базирование на местности гидроаэродрома дает возможность проведения гидроакустического контроля водного объема летного бассейна с геометрическими размерами: длина ~2500 м, ширина ~200 м, глубина ~ от 3 м до 6 м на постоянной основе: как круглосуточно, так и круглогодично. Оперативность результативного гидроакустического мониторинга водного слоя летного бассейна значительных поперечных размеров, но столь малых глубин, может быть обеспечена при одновременном «разночастотном» ультразвуковом зондировании отдельных его частей, отображении и анализе полученной информации, на основе чего в реальном масштабе времени проясняется подводная обстановка на всей акватории гидроаэродрома. С этой целью необходимо оборудовать дно прибрежного участка водной акватории гидроаэродрома стационарными приемоизлучающими антенными устройствами, определенным образом расположенными по летному бассейну и связанными по кабелю каждый с береговым оборудованием гидроакустической службы гидроаэродрома, которое обеспечивает формирование зондирующих сигналов, обработку, регистрацию и отображение полученной информации. Отметим преимущества предлагаемого варианта:
1) расположение приемоизлучающих антенных устройств на дне акватории позволяет подключать их в необходимой последовательности, что определяет выполнение поставленной задачи, например, проведение ультразвукового зондирования водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра, осуществление текущего эхопоиска на периметре летного бассейна гидроаэродрома, пассивный режим наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома базирования и т.д.;
2) существенное уменьшение уровней акустических помех: так, например, из опыта рыболокации известно, что применение буксируемой антенны, удаленной от корпуса судна, снижает на порядок уровень регистрируемого шума в сравнении с подкильным вариантом размещения антенны (см. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986, с.154-181);
3) стабилизация положения в пространстве основных лепестков характеристик направленности приемоизлучающих антенных устройств;
4) возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн, границы раздела «вода-лед» (толщина льда) в различных точках акватории (режим волнографа);
5) улучшение условий замены, обслуживания и ремонта приемоизлучающих антенных устройств;
6) возможность осуществления постоянного гидроакустического подводного наблюдения на акватории как летного бассейна гидроаэродрома, так и прилегающего водоема вне зависимости от погодных условий, времени суток и года не только в активном, но и в пассивном режимах работы аппаратуры.
Следует учитывать, что для увеличения производительности при осуществлении эхопоиска в пределах заданных частей водного объема мелководного летного бассейна гидроаэродрома, каждое донное приемоизлучающее антенное устройство должно обеспечить уникальные условия подводного наблюдения: в угломестной плоскости - в узком угловом секторе, а в азимутальной - в широком (оптимальным является круговой обзор), причем, положение в угломестной плоскости узкого углового сектора наблюдения при сохранении кругового обзора должно изменяться ступенчато от направления «параллельно» до направления «нормально» относительно границы раздела «вода-воздух». Это возможно в том случае, если конструкция антенного устройства представляет собой полусферу, поверхность которой разделена параллелями на полосы одинаковой ширины, причем, для упрощения конструкции и технологичности изготовления криволинейные поверхности всех круговых полос различных длин можно заменить различными количествами небольших плоских площадок, которые их аппроксимируют и расположены нормально относительно радиуса (фиг.2). Описанные особенности конструкции дают возможность за счет использования различных полос изменять геометрию эхопоиска на мелководье: от горизонтального (нижняя круговая полоса с наибольшим периметром) и наклонного в направлении «снизу-вверх» под определенным углом скольжения к границе раздела «вода-воздух» (круговые полосы с меньшими периметрами) до вертикального (верхний сегмент сферической поверхности). Следуя данному подходу, конструкцию приемоизлучающего антенного устройства можно сформировать с помощью размещения на данных площадках полос малогабаритных электроакустических преобразователей с одинаковой апертурой - излучающих элементов, акустические оси которых разнесены на заданный угол, но выходят из одной точки - центра кривизны аппроксимируемой поверхности полусферы. Приемоизлучающее устройство такой конструкции может обеспечить как круговой (все элементы выбранных полос работают в режимах излучения и приема), так и секторный (часть элементов выбранных полос работает в режимах излучения и приема) обзор, а также дискретное сканирование результирующей характеристики направленности (задан во времени и по направлению определенный порядок режимов излучения и приема каждым элементом выбранной полосы отдельно) как в азимутальной, так и угломестной плоскостях.
Уникальные характеристики полигармонической «акустической освещенности» границ раздела и объектов поиска: малый уровень бокового излучения при постоянстве остроты направленного действия в широком диапазоне изменения рабочих частот, приемлемые весогабаритные показатели и т.д. могут быть обеспечены только при использовании в качестве излучающих элементов параметрических антенн. Излучающая параметрическая антенна - это две совмещенные в пространстве интерференционные антенны, излучающие соосные интенсивные ультразвуковые пучки накачки, в приосевой области которых при выполнении условий синхронизма происходит генерация новых спектральных компонент. Возникновение полигармонического зондирующего сигнала в акустическом поле следует рассматривать как результат изменения упругих свойств нелинейной водной среды в области распространения мощного бигармонического (f1, f2) сигнала накачки, что приводит к перераспределению энергии интенсивных ультразвуковых волн по частотной оси как «вверх» - генерации высших гармонических компонент волн накачки, волны суммарной частоты (nf1, nf2, f+=f1+f2), где n=2, 3, 4, …, так и «вниз» - генерации волны разностной F=|f1-f2| частоты (см. Гидроакустическая энциклопедия. - Таганрог, Издательство ТРТУ. 1999, с.389-402). Практическое использование всего лишь одной компоненты спектра - волны разностной частоты - из всего набора формирующихся в водной среде спектральных составляющих излучения параметрической антенны для получения информации, отражающей присутствие, определенные свойства и характеристики подводных объектов является «энергетически расточительным», в то время как прием и обработка эхосигналов суммарной частоты, высших гармоник сигналов накачки - f+=f1+f2, nf1, 2 (n=2, 3, …) позволит расширить эксплуатационные возможности донных приемоизлучающих устройств, используемых в предлагаемом способе подготовки летного бассейна гидроаэродрома, так как усилит одно из наиболее важных качеств параметрических гидролокационных систем: возможность оперативной перестройки параметров зондирующих сигналов, что позволяет его адаптировать к конкретной ситуации эхопоиска (см. В.Ю.Волощенко, В.И.Тимошенко. Параметрические гидроакустические средства ближнего подводного наблюдения (ч.1). - Таганрог: Изд-во ТТИ ЮФУ, 2009).
Генерация волны разностной частоты параметрической антенной достаточно полно изучена теоретически и экспериментально, предложено несколько практических приложений, в частности, использующих формирование направленного излучения низкочастотных сигналов в широком частотном диапазоне при малых весогабаритных характеристиках электроакустических преобразователей накачки. На фиг.3А, Б представлены типичные экспериментальные характеристики направленности квадратного (80 мм×80 мм) электроакустического преобразователя параметрической антенны: для волны накачки (А) с частотой 230 кГц и формирующихся в водной среде сигналов нескольких разностных (Б) частот - 40, 20 и 2,5 кГц (а, б, в соответственно) (см. В.А.Воронин, С.П.Тарасов, В.И.Тимошенко. Гидроакустические параметрические системы. Ростов н/Д: Ростиздат, 2004, с.67-69). Используя масштабную сетку, нанесенную на фиг.3, проведем сопоставление угловых распределений амплитуд звуковых давлений данных сигналов: так, из записей для сформировавшихся в водной среде сигналов разностных частот видно, что ширина характеристики направленности на уровнях (-3 дБ), (-6 дБ) и (-10 дБ) в диапазоне частот (2,5-40) кГц практически постоянна и равна 4°, 6° и 8° соответственно при практически полном отсутствии бокового поля, в то время как для сигнала накачки характеристика направленности имеет классический интерференционный вид: ширина характеристики направленности на уровне (-3 дБ) около 5°, зарегистрировано боковое поле - первый дополнительный максимум с уровнем (-18 дБ) в направлениях (±6°) относительно акустической оси, второй - (-28 дБ) в направлениях - (±12°) и т.д. Исходя из анализа описанных выше пространственных характеристик сформировавшихся акустических полей для формирующегося в нелинейной водной среде сигнала разностной частоты можно сделать вывод о целесообразности применения именно параметрических излучающих антенн в качестве излучающих элементов в конструкции донных приемоизлучающих антенных устройств, размещаемых в соответствии с предлагаемым способом на акватории летного бассейна гидроаэродрома долговременного базирования. В данном случае результирующее акустическое поле отдельной полосы, собранной из электроакустических преобразователей параметрических антенн, сохраняя высокую остроту направленного действия на сигнале разностной частоты в угломестной плоскости, в азимутальной плоскости является всенаправленным, так как образуется в результате конструктивно заданного частичного перекрывания основных максимумов характеристик направленности для волны разностной частоты на некотором уровне (0,8; 0,7 или 0,5 по давлению).
На фиг.4 представлены экспериментальные характеристики направленности двух однотипных параметрических антенн с круглыми (диаметр 65 мм) электроакустическими преобразователями накачки для формирующегося в водной среде сигнала разностной частоты F=50 кГц, откуда следует, что для каждой из них ширина основного лепестка по уровню 0,7 для низкочастотного зондирующего сигнала составляет 6° при уровне бокового излучения (-30 дБ). Следует отметить, что снижение массогабаритных показателей антенн параметрических систем активной локации происходит только в тракте излучения низкочастотных сигналов разностной частоты, а для обеспечения достаточной разрешающей локатора по углу приемная интерференционная антенна должна иметь существенные поперечные размеры, определяемые закономерностями «линейной акустики»: например, в режиме приема эхосигналов разностной частоты 50 кГц на тот же круглый (диаметр 65 мм) электроакустический преобразователь острота направленного действия по уровню 0,7 составит уже 28°, а уравнивание разрешающих способностей как в излучении, так и в приеме требует использования приемного поршневого электроакустического преобразователя диаметром 300 мм. В свою очередь увеличить разрешающую способность параметрических систем активной локации можно за счет приема и обработки эхосигналов суммарной частоты, высших гармоник сигналов накачки - f+=f1+f2, nf1, 2 (n=2, 3, …), что позволит расширить эксплуатационные возможности донных приемоизлучающих устройств.
На фиг.5 представлены экспериментально измеренные в условиях гидроакустического бассейна характеристики направленности электроакустического преобразователя накачки параметрической антенны для сигнала накачки частоты f=270 кГц и формирующихся в нелинейной водной среде высших гармонических компонент 2f=540 кГц, 3f=810 кГц (см. Волощенко В.Ю., Тимошенко В.И., Волков С.В., Панченко П.В., Волков А.С. Акустическая локационная система ближнего действия для самолетов-амфибий / Сб. докладов VII научной конференции по гидроавиации «Гидроавиасалон-2008», ч.2. - М.: ЦАГИ, 2008. - С.96-101). Используя масштабную сетку, нанесенную на фиг.5, проведем сопоставление угловых распределений амплитуд звуковых давлений данных сигналов. Так, из записей для сформировавшихся в водной среде сигналов следует, что электроакустический преобразователь накачки имеет: на частоте f=270 кГц ширину диаграммы направленности по уровню 0,7 θ0,7(f)=5,2°, первый боковой лепесток под углом (±8,3°) к акустической оси с уровнем (-11 дБ), второй боковой лепесток под углом (±14°) к акустической оси с уровнем (-30 дБ); на частоте 2f=540 кГц ширину диаграммы направленности по уровню 0,7 θ0,7(2f)=3,8°, первый боковой лепесток под углом (±5,2°) к акустической оси с уровнем (-20 дБ); на частоте 3f=810 кГц ширину диаграммы направленности по уровню 0,7 θ0,7(3f)=2,6° при боковом поле с уровнем (-43 дБ). Из представленных данных видно, что акустические поля сформировавшихся в водной среде высокочастотных спектральных компонент соответствуют условиям подводного наблюдения на мелководье летного бассейна гидроаэродрома, в то время как эхопоиск на сигнале основной частоты будет существенно осложнен. Генерация в среде распространения высших гармонических составляющих излученного акустического сигнала конечной амплитуды обусловлена изменением упругих свойств нелинейной водной среды. На акустической оси амплитудно-зависимое изменение свойств среды под действием мощной волны накачки с частотой f происходит в наибольшей степени, в то время как для внеосевых направлений в силу снижения амплитуд звуковых давлений свойства среды распространения мало отличаются от своих невозмущенных значений. Это приводит к появлению интересного эффекта: главный максимум излучения формирующихся акустических полей для каждой последующей гармоники уже, а уровень бокового поля - меньше, чем у предыдущей. Как следует из представленных данных, несмотря на то, что эффективность преобразования энергии волны накачки вверх по частотному спектру снижается для каждой последующей гармоники, акустические поля данных сигналов обладают «полезными» пространственными характеристиками с точки зрения разработки локационных систем ближнего подводного наблюдения, так как при соответствующем увеличении излучаемой акустической мощности дают возможность одновременно осуществлять горизонтальный эхопоиск на мелководье с регулируемой разрешающей способностью по углу, выбор значения которой определяется как информационно-физическими свойствами конкретного участка водной среды, так и совокупностью внешних природных факторов: наличием взвешенных частиц, воздушных пузырьков, направлением и скоростью течения воды, глубиной, ветровым волнением и т.д. (см. Волощенко В.Ю., Волощенко А.П., Волков А.С., Куповых В.Г. Нелинейная гидроакустическая локационная система для мониторинга водного объема взлетно-посадочной полосы гидроаэродрома // Материалы Четвертой Всероссийской научно-практической конференции «Перспективные системы и задачи управления». - Таганрог: Изд-во ТТИ ЮФУ, 2009. Т.1. - С.274-276).
Данные параметры ультразвуковых полей формирующихся в водной среде компонент F=|f1-f2|, f+=f1+f2, nf1, 2 (n=2, 3, …) спектра излучения параметрической антенны удовлетворяют условиям ближней локации на мелководье, что позволило при использования нескольких однотипных круглых (диаметр 65 мм) электроакустических преобразователей накачки провести испытания макета предлагаемой конструкции. Экспериментальные испытания разработанного макета участка полосы наибольшего периметра приемоизлучающего антенного устройства (две проекции макета представлены на фиг.6а, б), который изготовлен на основе пяти электроакустических преобразователей накачки (диаметр поверхности каждого электроакустического преобразователя (1-5) накачки 65 мм, угол разнесения акустических осей соседних преобразователей α=6°, радиус кривизны 0,55 м, частоты центральной исходной и разностной волн f0=(f1+f2)/2=275 кГц и F=|f1-f2|=50 кГц соответственно) в условиях гидроакустического бассейна показали следующее:
1) конструкция разработанного макета позволяет путем переключения электроакустических преобразователей накачки производить на рабочих сигналах F=|f1-f2|, f1, 2f1, 3f1 дискретное сканирование соответствующих характеристик направленности параметрических антенн с шагом 6° в секторе 30°;
2) одновременное возбуждение нескольких преобразователей накачки макета позволяет формировать секторные характеристики направленности в горизонтальной плоскости. Так, для трех соседних параметрических антенн значения ширины по уровню 0,7 результирующего главного максимума секторной характеристики направленности в горизонтальной и вертикальной плоскостях составляют: для сигнала накачки f=270 кГц 18° и 5,2° (фиг.7), для второй гармоники сигнала накачки 2f=540 кГц 16° и 3,8° (фиг.8), для третьей гармоники сигнала накачки 3f=810 кГц 16,6° и 2,6° (фиг.9). Как следует из фиг.7, 8, 9, флуктуации уровней амплитуд звукового давления в области результирующих главных максимумов для сигналов f, 2f, 3f составляли не более 3 дБ, 7 дБ и 9 дБ соответственно, что вызвано выбором слишком большой величины угла разнесения (6°) акустических осей соседних преобразователей накачки; а уровни бокового излучения во взаимноперпендикулярных плоскостях - (-11 дБ), (-20 дБ) и (-43 дБ) соответственно. Для двух соседних параметрических антенн значения ширины по уровню 0,7 результирующего главного максимума секторной характеристики направленности в горизонтальной и вертикальной плоскостях составляют: для сигнала разностной частоты F=50 кГц 12° и 6° (фиг.10) при флуктуации уровня амплитуды звукового давления в области результирующего главного максимума не более 2 дБ и уровне бокового излучения (-24 дБ);
3) конструкция макета позволяет сохранить преимущества параметрических антенн, причем, поворот результирующего главного максимума секторной характеристики направленности производится наиболее простым способом - путем переключения электроакустических преобразователей накачки, что выгодно его отличает от электронного и механического дискретного сканирования;
4) полоса пропускания электроакустического преобразователя накачки составляет около 55 кГц, что позволяет формировать в водной среде параметрическую антенну, частоты волн накачки которой изменяются в диапазонах f1=(248,5-272,5) кГц и f2=(277,5-302,5) кГц и эффективно генерирует дополнительные компоненты спектра излучения в диапазонах частот: разностных F=(5-55) кГц, вторых гармоник волн накачки 2f1=(497-545) кГц и 2f2=(555-605) кГц.
Расширение диапазона рабочих частот эхопоиска за счет перераспределения параметрической антенной энергии волн накачки как «вниз», так и «вверх» по спектру, позволяет в рамках предлагаемого способа предложить решение проблемы взаимного мешающего влияния гидролокационных устройств, используемых на акватории для эхопоиска на небольших удалениях друг от друга. Современные микропроцессорные средства позволяют для каждого электроакустического преобразователя, входящего в комплект донного приемоизлучающего антенного устройства, запрограммировать «индивидуальный» набор параметров излучения и приема: момент излучения в требуемом направлении эхопоиска, длительность зондирующего импульса, значения частот бигармонической накачки f2i, f1i, входящих в полосу пропускания электроакустического преобразователя, а также регистрируемую спектральную компоненту из набора частот Fi=|f2i-f1i|, f1i, f2i, f+i=f2i+f1i, 2f1i, 2f2i, …принимаемого полигармонического эхосигнала (см. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. - Ростов н/Д: Ростиздат, 2004, с.243-247). Это позволяет осуществить важную операцию при эхопоиске на мелководье, устраняющую причину возникновения ультразвуковых помех взаимного влияния по гидроакустическому каналу при «встречном» или «скользящем» взаимном облучении друг друга соседними донными приемоизлучающими модулями, - уникальное «частотное окрашивание» каждого пространственного углового сектора в верхней полусфере подводного наблюдения за счет соответствующей фильтрации полигармонических эхосигналов, принимаемых электроакустическими преобразователями донных приемоизлучающих антенных устройств.
Общая схема размещения приемоизлучающих антенных устройств на акватории в соответствии с предлагаемым способом подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета показана на фиг.11 в масштабе «1 клетка-100 метров». Положение необходимой летной полосы 1 в летном бассейне 2 для приводнения гидросамолета против ветра (стрелка 3) отмечено штриховкой между двумя сплошными параллельными линиями, как видно из фиг.11, предусмотрено еще несколько возможных направлений летных полос (параллельные прямые, между которыми расположена штрихпунктирная линия). Как следует из чертежа, подводный объем взлетно-посадочной летной полосы 1, на которую планируется приводнение гидросамолета, предварительно зондируется с помощью трех донных приемоизлучающих антенных устройств 4, работающих в одном из описанных выше режимов.
Окружностями на фиг.11 отмечены границы предполагаемых зон подводного наблюдения для соответствующих сигналов:- - • • - волна разностной частоты, ― волна накачки, - - - вторая гармоника накачки, -•- третья гармоника накачки. Исключение помех взаимного влияния при осуществлении режима ультразвукового круглосуточного мониторинга водного объема гидроаэродрома может быть обеспечено аналогичным образом при использовании приемоизлучающих антенных блоков 4, расположенных по периметру летного бассейна 2.
В соответствии с предлагаемым способом появляется возможность осуществления еще более простого варианта исключения помех взаимного влияния при одновременной работе нескольких приемоизлучающих антенных устройств 4, расположенных в пределах обследуемой взлетно-посадочной полосы (см. фиг.11, участок слабой штриховки), в основе которого лежит уникальная способность параметрических излучающих трактов формировать в водной среде широкополосное излучение НЧ и ВЧ спектральных компонент. Действительно, используя однотипные электроакустические преобразователи с центральной резонансной частотой f0=250 кГц, которые возбуждаются на различных частотах накачки в пределах полосы пропускания, можно сформировать для каждого приемоизлучающего антенного модуля свой набор рабочих сигналов: например, первое приемоизлучающее антенное устройство для сигналов накачки 245 кГц и 255 кГц будет иметь сигналы разностной и суммарной частот - 10 кГц и 500 кГц, вторых гармоник накачки - 490 кГц и 510 кГц; второе - для сигналов накачки 240 кГц и 260 кГц - сигналы разностной и суммарной частот - 20 кГц и 500 кГц, вторых гармоник накачки - 480 кГц и 520 кГц и т.д., причем, частота спектральной компоненты определяет геометрию эхопоиска на мелководье: горизонтальный - сигналы разностной частоты, наклонный в направлении «снизу-вверх» под определенным углом скольжения к границе раздела «вода-воздух» - сигналы суммарной частоты, вторые гармоники волн накачки, вертикальный - сигнал третьей гармоники накачки.
Первые параметрические приборы для активной локации и измерительных целей были созданы в 80-х годах прошлого столетия в Таганрогском радиотехническом институте на кафедре электрогидроакустики и ультразвуковой техники (ныне кафедра электрогидроакустической и медицинской техники Таганрогского технологического института Южного федерального университета) (см. Новиков Б.К., Руденко О.В., Тимошенко В.И. Нелинейная гидроакустика. - Л.: Судостроение, 1981. - 264 с.). Среди них ведущее положение занимают исследовательские параметрические гидролокаторы, процесс проектирования которых позволил выработать принципы построения и использования параметрической гидроакустической аппаратуры для серийного производства (см. Новиков Б.К., Тимошенко В.И. Параметрические антенны в гидролокации. - Л.: Судостроение, 1989. - 256 с., Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. - Ростов н/Д: Ростиздат, 2004. - 400 с., В.Ю.Волощенко, В.И.Тимошенко. Параметрические гидроакустические средства ближнего подводного наблюдения (ч.1). - Таганрог: Изд-во ТТИ ЮФУ, 2009. - 294 с.). Для аппаратурной реализации предлагаемого способа может быть взят за основу параметрический излучающий тракт гидролокатора со сканирующей характеристикой направленности для обнаружения заиленных объектов и трубопроводов, в состав которого входят формирователь сигнала накачки в виде сорокавосьми частотно-модулированных компонент, а также сорокавосьмиканальные как усилитель мощности, так и двухрезонансный электроакустический преобразователь накачки (см. Воронин В.А., Тарасов С.Л., Тимошенко В.И. Гидроакустические параметрические системы. - Ростов н/Д: Ростиздат, 2004, с.247-252). В качестве альтернативного варианта реализации формирователя сигналов накачки излучающего тракта, реализующего предлагаемый способ, который объединяет возможности цифровой и вычислительной техники, может быть использован аппаратурно-программный комплекс синтезатора сигнала накачки на базе ПЭВМ типа IBM, что обеспечивает задание, ввод, корректировку значений параметров генерируемого сигнала в интерактивном режиме и генерацию сигналов накачки с заданными значениями параметров (см. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. - Ростов н/Д: Ростиздат, 2004, с.243-247). Отработаны вопросы разработки параметрических гидролокаторов для подводных необитаемых аппаратов, буксируемых судном, а также глубоководных зондов, погружаемых с неподвижного судна, общей особенностью которых является аппаратурное разделение на две части: бортовой (надводный) и погружаемый (подводный) блоки, связанных с помощью многожильного кабеля длиной до 2000 м (см. Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. - Ростов н/Д: Ростиздат, 2004, с.252-268, 293-302). В соответствии с предлагаемым способом каждое приемоизлучающее антенное устройство 4 должно быть снабжено электроакустическим преобразователем накачки, акустическая ось которого обращена в сторону границы раздела «вода-воздух» и ориентирована строго вертикально для обеспечения измерительного режима гидроакустического волнографа. Принцип действия гидроакустических приборов для измерения параметров волнения моря - волнографов, особенности построения структурных схем, параметров используемых сигналов подробно описаны в литературе (см. Простаков А.Л. Электронный ключ к океану: Гидроакустическая техника сегодня. - Л.: Судостроение, 1978, с.126-128, Богородский А.В., Яковлев Г.В., Корепин Е.А., Должиков А.К. Гидроакустическая техника исследования и освоения океана. - Л.: Гидрометеоиздат, 1984, с.90-93). Специфика работы гидроакустического волнографа определяется непрерывным изменением формы отражающей поверхности и расстояния до нее, сильным воздействием объемной реверберации, возникающей в приповерхностном слое и маскирующей полезный сигнал, в связи с чем в качестве измерительного можно использовать сигнал суммарной частоты. Зондирующие импульсы сигнала суммарной частоты отражаются от границы раздела, расстояние до которой непрерывно изменяется по закону, характеризующему волнение моря, что позволяет получить волновой профиль, определить форму, высоту волн и направление их движения в различных точках акватории гидроаэродрома. В зимний период эксплуатации акватории летного бассейна гидроаэродрома использование вертикального зондирования в режиме эхоледомера с помощью электроакустического преобразователя накачки параметрической антенны, акустическая ось которого обращена вертикально вверх - в сторону границ раздела «вода-лед-воздух», позволит оценить динамику утолщения ледового покрытия и его прочность (см. В.Ю.Волощенко, В.И.Тимошенко. Параметрические гидроакустические средства ближнего подводного наблюдения (ч.1). - Таганрог: Изд-во ТТИ ЮФУ, 2009, с.250-266). При гидролокации используются три способа обзора пространства: 1) шаговый с узкой характеристикой направленности антенны как в излучении, так и приеме, которая механически поворачивается в плоскости обзора, 2) круговой со всенаправленным в плоскости обзора излучением и сканирующей в течение импульсного зондирования узкой характеристикой направленности приемной антенны, 3) круговой в плоскости обзора со сканирующей в течение импульсного зондирования узкой характеристикой направленности излучающей антенны и статически сформированными лепестками характеристики направленности приемной антенны, равномерно перекрывающими весь горизонт или нужный сектор обзора (см. Простаков А.Л. Электронный ключ к океану: Гидроакустическая техника сегодня. - Л.: Судостроение, 1978 г., с.10-21). Последний метод кругового обзора может быть задействован в предлагаемом способе и обладает преимуществами: осуществлено квантование зоны обзора по направлению за счет предлагаемой формы приемоизлучающего антенного устройства - каждый лепесток (т.е. главные максимумы характеристик направленности электроакустических преобразователей накачки в режиме приема) статически сформированной характеристики направленности модуля и подключенный к нему индивидуальный канал обработки эхосигнала выдает информацию о целях, находящихся в конкретном секторе обзора. Обзор всего горизонта осуществляется за счет последовательного опроса выходов всех каналов и подключения их к индикатору кругового обзора.
Осуществление гидроакустического мониторинга подводного объема акватории летного бассейна в соответствии с предлагаемым способом существенно повысит его результативность за счет устранения ультразвуковых помех взаимного влияния по мелководному гидроакустическому каналу вследствие квантования секторов обзора как по направлению, так и по частоте регистрируемого эхосигнала («частотное окрашивание), что повысит безопасность взлетно-посадочных действий на акватории летного бассейна гидроаэродрома.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| МНОГОЧАСТОТНОЕ ПРИЕМОИЗЛУЧАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО | 2018 |
|
RU2700031C1 |
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ПОДГОТОВКИ ГИДРОАЭРОДРОМОВ ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПОСАДКИ ГИДРОСАМОЛЕТОВ | 1994 |
|
RU2093428C1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПАРАМЕТРИЧЕСКОЙ ГЕНЕРАЦИИ УЛЬТРАЗВУКА | 2017 |
|
RU2697566C2 |

Изобретение относится к авиации и касается технологии подготовки гидроаэродрома к взлетно-посадочным операциям гидросамолетов. Способ подготовки летного бассейна гидроаэродрома заключается в том, что в пределах летного бассейна гидроаэродрома определяют положение взлетно-посадочной полосы как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны. Экипаж судна на воздушной подушке производит установку маркерных знаков, в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривается путь перемещения гидросамолета по акватории. Осуществляются швартовка, отшвартовка и буксировка гидросамолета после его приводнения или перед взлетом. На борту судна на воздушной подушке размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости. В пределах летного бассейна гидроаэродрома размещают вдоль осей взлетно-посадочных полос донные приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях. Изобретение повышает безопасность взлетно-посадочных действий магистральных самолетов-амфибий за счет осуществления гидроакустического мониторинга водного объема летного бассейна гидроаэродрома. 4 з.п. ф-лы, 11 ил.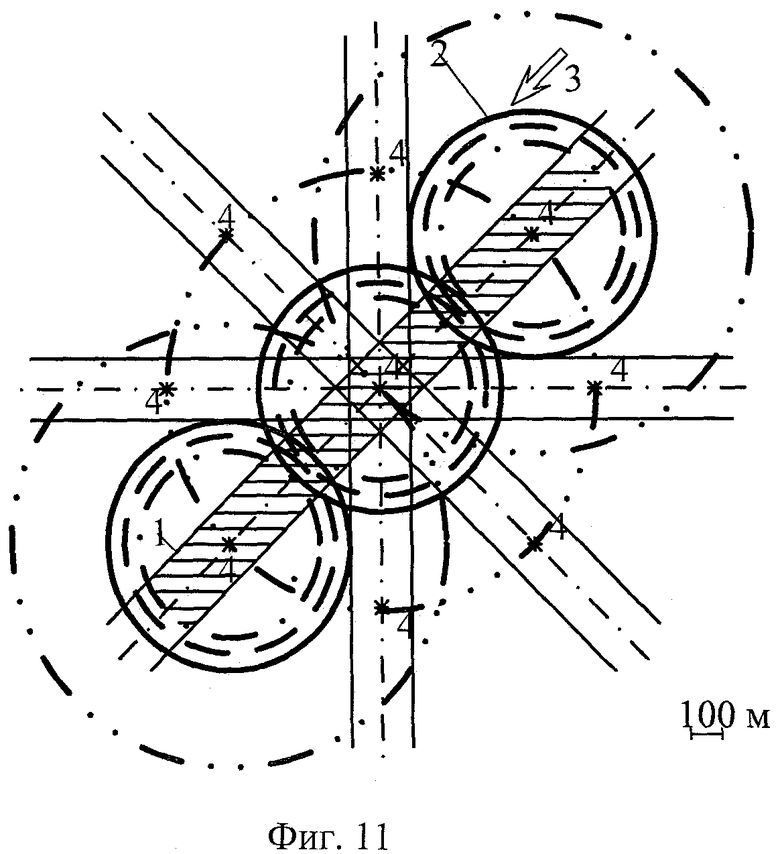
1. Способ подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета, заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют положение взлетно-посадочной полосы как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж судна на воздушной подушке производит установку маркерных знаков, в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту судна на воздушной подушке размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости, отличающийся тем, что в пределах летного бассейна гидроаэродрома размещают вдоль осей взлетно-посадочных полос донные приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях.
2. Способ по п.1, отличающийся тем, что приемоизлучающие антенные устройства соединены кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне.
3. Способ по п.1, отличающийся тем, что операторами береговой гидроакустической службы осуществляются различные виды подводного мониторинга: ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; текущий эхопоиск на периметре летного бассейна гидроаэродрома; режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома, причем перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года.
4. Способ по п.1, отличающийся тем, что одновременное использование соседних донных антенных устройств полусферической формы дает дополнительную возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн), границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна.
5. Способ по п.1, отличающийся тем, что на основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как судна на воздушной подушке, осуществляющему описанные выше действия, так и гидросамолета, готовящегося к выполнению взлетно-посадочных операций.
| СПОСОБ ПОДГОТОВКИ ГИДРОАЭРОДРОМОВ ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПОСАДКИ ГИДРОСАМОЛЕТОВ | 1994 |
|
RU2093428C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ГИДРОЛЕТАТЕЛЬНОГО АППАРАТА (ГДЛА) НА ВОДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2135399C1 |
| Торцефрезный станок для обработки длинномерных деталей | 1949 |
|
SU86321A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИДИЕНОВ | 2011 |
|
RU2692101C2 |

