Настоящее изобретение относится к медицинским устройствам и, в частности, медицинским устройствам, использующим волоконно-оптическую технологию для слежения за формой, положением и ориентацией преобразовательных устройств для визуализации и лечения.
В областях применения ультразвуковой техники, пространственное слежение за преобразователями выполняли посредством механического зондирования (например, устройством для внутривенного ультразвукового исследования (IVUS) с обратной тракцией), регистрация данных на основе изображения от 2-мерных или 3-мерных зондов, стереоскопической видеосистемы на основе инфракрасных (ИК) камер или электромагнитного (ЭМ) измерения. Механические устройства для ограниченного движения преобразователя сложны для применения (и могут ухудшать качество изображения, поскольку траектория, задаваемая механическим движением, может не совпадать с оптимальными акустическими проекциями). Кроме того, механические устройства обладают ограниченной точностью, которая зависит от жестко управляемого механического устройства обратной тракции.
Регистрация по результатам анализа изображений требует большого объема вычислений и большого расхода времени и снижает возможную частоту кадров при визуализации. Кроме того, совмещение по результатам анализа изображений ограничено слежением за относительными движениями между объемами и не может обеспечить оценок абсолютного положения траектории преобразователя (особенно, когда движение преобразователя происходит по нелинейной поверхности). Определение местонахождения на основе ИК камер чувствительно к преградам на линии визирования, что ограничивает применимость данного метода, в частности, в клинических условиях, когда невозможно обеспечить четкую линию визирования между отслеживаемым преобразователем и ИК камерами. Для определения местонахождения методом ЭМ измерения характерна ограниченная пространственная точность и воспроизводимость, при чувствительности к изменениям пространственно-временных характеристик локальной ЭМ среды. Приведенные ограничения рабочих характеристик слежения, в свою очередь, влияют на возможности устройства ультразвуковой визуализации по обеспечению высокого качества изображения, анатомической точности, больших полей обзора или высоких частот кадров. Все упомянутые технологии слежения измеряют местоположение жесткого преобразователя как единого объекта, тогда как технология слежения, которая позволяет определять динамическую форму преобразовательных элементов, будет допускать гибкие конфигурации преобразователей с усовершенствованным получением и реконструкцией изображений, когда данные слежения за элементом применяют в сочетании с сигналами преобразователя в способе формирования изображения.
Целью изобретения является создание систем и способов, которые обеспечивают надежное выполнение позиционирования и размещения медицинских устройств, и с использованием которых можно выполнять определение положения с пространственным распределением и, тем самым, применять гибкие матрицы для формирования изображений, что невозможно в современных обычных датчиках (зондов).
В соответствии с принципами настоящего изобретения, устройство, система и способ для определения положения, ориентации или формы содержат преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений по отраженным волнам. С преобразовательным устройством соединен гибкий кабель для обеспечения энергии возбуждения в преобразовательное устройство из стойки. Оптическое волокно имеет форму и положение, соответствующие форме и положению кабеля во время работы. Множество датчиков оптически связано с оптическим волокном. Датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна таким образом, что искривления и изгиб оптического волокна служат для определения информации о положении преобразовательного устройства.
Оптическое определение положения и ориентации преобразователя и закрепляющей кабельной системы устраняет ограничения обычных способов слежения и, тем самым, допускает расширенные возможности визуализации, например, визуализацию с расширенным полем обзора в реальном времени, динамическое пространственное объединение посредством визуализации под несколькими углами, визуализацию одновременно несколькими преобразователями и повышение разрешающей способности и улучшение качества изображений посредством формирования ультразвукового пучка усовершенствованной формы и реконструкции. Кроме того, средство оптического определения формы, встроенное в тело гибкой/реконфигурируемой матрицы преобразователей, будет обеспечивать в реальном времени данные о геометрической форме преобразователей, которые можно использовать для совершенствования получения и реконструкции изображений, при одновременной возможности динамической адаптации геометрической формы к клиническому применению (матрицы преобразователей больше не будут ограничиваться жесткими геометрическими конфигурациями и будут допускать нестандартные гибкие геометрические формы, например, с несколькими преобразовательными элементами, распределенными по длине оптически отслеживаемого катетера, для формирования пространственно протяженной деформируемой матрицы преобразователей).
Устройство для определения положения, ориентации и/или формы содержит преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений на основании энергии отраженных или проходящих волн. С преобразовательным устройством соединен гибкий кабель для обеспечения энергии возбуждения в преобразовательное устройство из стойки. По меньшей мере, одно оптическое волокно имеет форму и положение, соответствующие форме и положению кабеля во время работы. Обеспечено множество датчиков, оптически связанных с, по меньшей мере, одним оптическим волокном, при этом, датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна таким образом, что искривления и изгиб оптического волокна служат для определения информации о, по меньшей мере, чем-то одном из формы и положения преобразовательного устройства.
Другое устройство для определения положения, ориентации и/или формы содержит медицинский инструмент, преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений на основании энергии отраженных или проходящих волн, и гибкий кабель, соединенный с преобразовательным устройством, для обеспечения энергии возбуждения в преобразовательное устройство из стойки. По меньшей мере, одно оптическое волокно имеет форму и положение, соответствующие форме и положению медицинского устройства во время процедуры. Для определения формы и положения медицинского устройства относительно, по меньшей мере, одного оптического волокна обеспечено, по меньшей мере, одно другое устройство для определения положения. Множество датчиков оптически связано с, по меньшей мере, одним оптическим волокном, при этом, датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна таким образом, что искривления и изгиб оптического волокна и, по меньшей мере, одно другое устройство для определения положения служат для определения информации о, по меньшей мере, чем-то одном из формы и положения медицинского устройства во время процедуры.
Система для слежения за участком устройства для визуализации или терапии содержит пространственно распределенные волоконные брэгговские решетки (FBG), интегрированные на оптическом волокне и расположенные внутри гибкого кабеля. Ультразвуковой преобразователь соединен с ультразвуковой стойкой посредством гибкого кабеля. Оптическая система сконфигурирована с возможностью доставки света к решеткам FBG и приема света из решеток FBG таким образом, чтобы измерять искривления оптического волокна в гибком кабеле. Компьютерная система содержит программу определения формы, сконфигурированную с возможностью вычисления параметров, зависящих от искривления оптического волокна, и определения конфигурации гибкого кабеля таким образом, что конфигурация гибкого кабеля обеспечивает положение ультразвукового преобразователя.
Способ слежения за положением устройства визуализации содержит этап обеспечения преобразовательного устройства, сконфигурированного с возможностью получения сигналов из стойки и формирования изображений по отраженным волнам, гибкого кабеля, соединенного с преобразовательным устройством, для обеспечения энергии возбуждения в преобразовательное устройство из стойки и, по меньшей мере, одного оптического волокна, имеющего форму и положение, соответствующие форме и положению кабеля во время работы, и множества датчиков, оптически связанных с, по меньшей мере, одним оптическим волокном. Устанавливают преобразовательное устройство и измеряют искривления и изгиб, по меньшей мере, одного оптического волокна, которое соответствует форме и положению кабеля, таким образом, что искривления и изгиб оптического волокна служат для определения информации о форме и положении преобразовательного устройства.
Приведенные и другие цели, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания его наглядных вариантов осуществления, которое следует изучать совместно с прилагаемыми чертежами.
Настоящее изобретение подробно изложено далее в нижеследующем описании предпочтительных вариантов осуществления, со ссылкой на нижеприведенные фигуры, на которых:
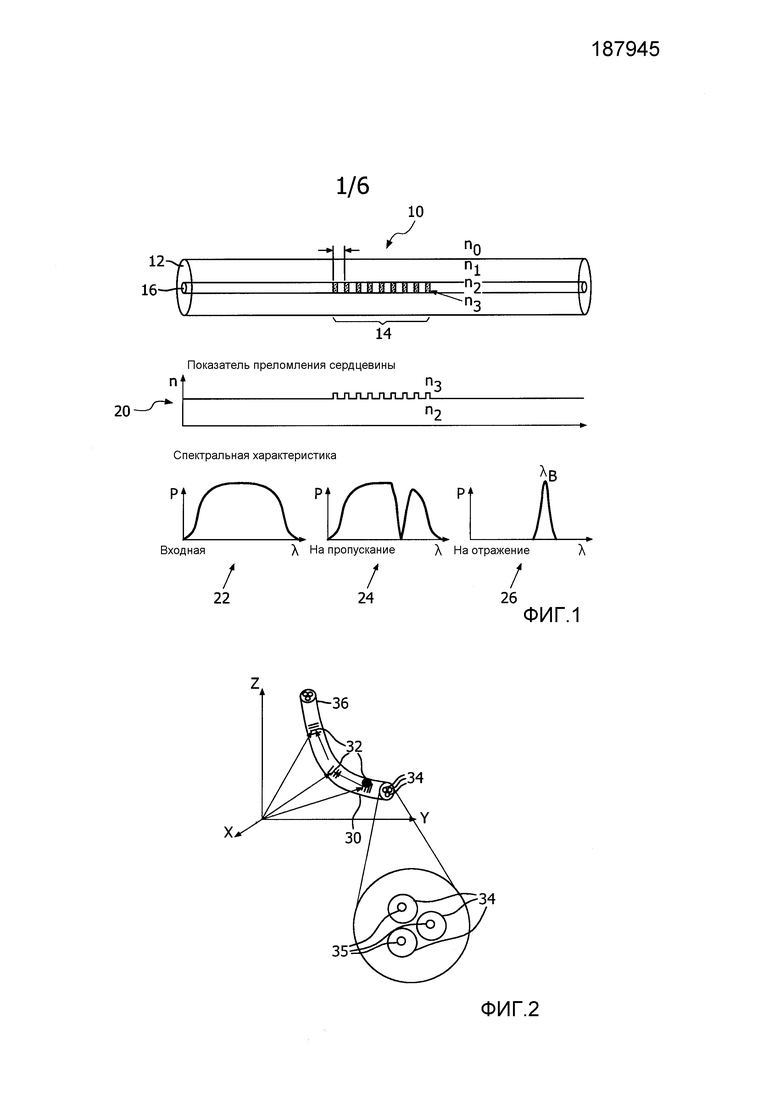
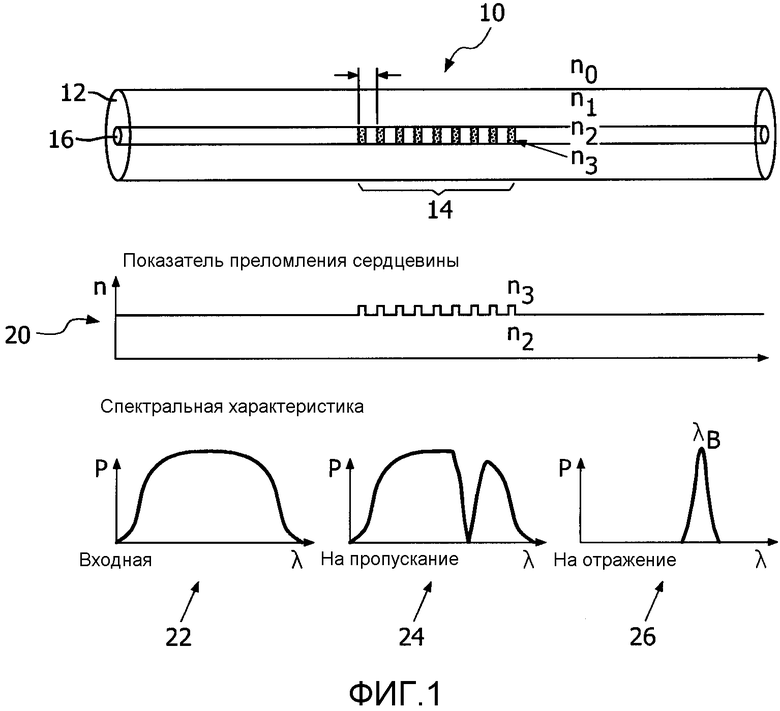
Фиг.1 - иллюстрирует оптическое волокно, содержащее волоконную брэгговскую решетку (FBG), график зависимости показателя преломления от расстояния и спектральную характеристику, обусловленную решеткой FBG;
Фиг.2 - вид трехволоконного жгута, искривленного в трехмерном пространстве;
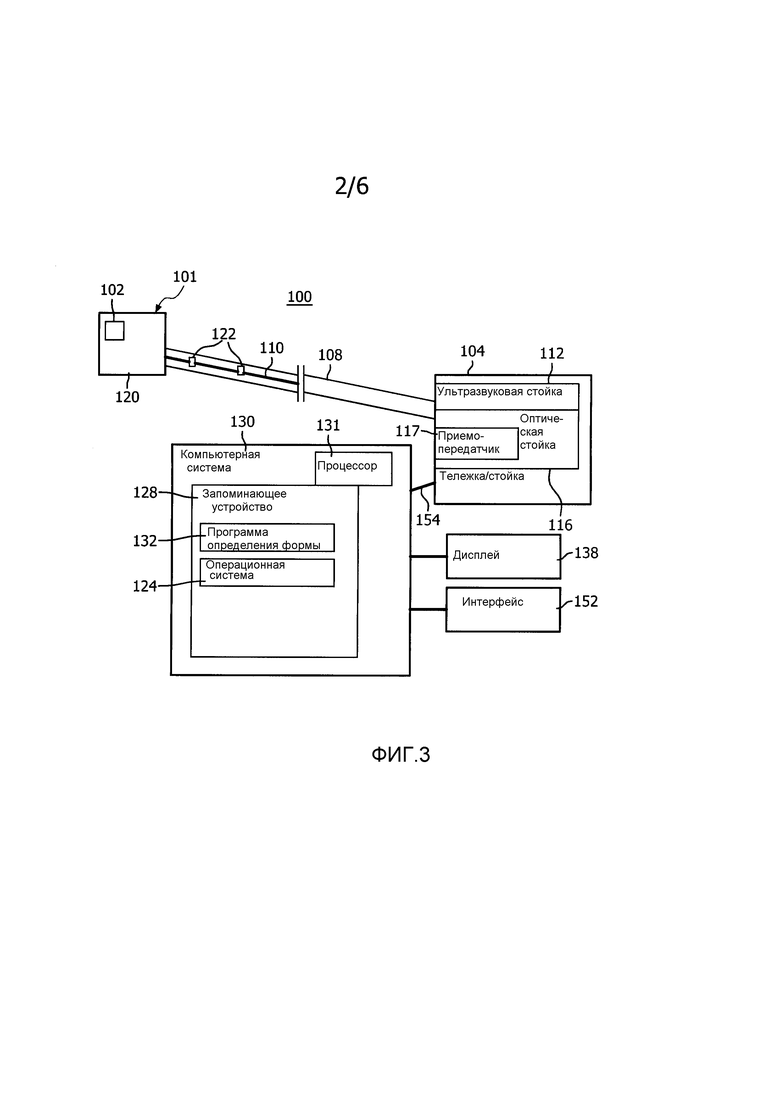
Фиг.3 - схема, представляющая систему для определения положения ультразвукового зонда в соответствии с одним наглядным вариантом осуществления;
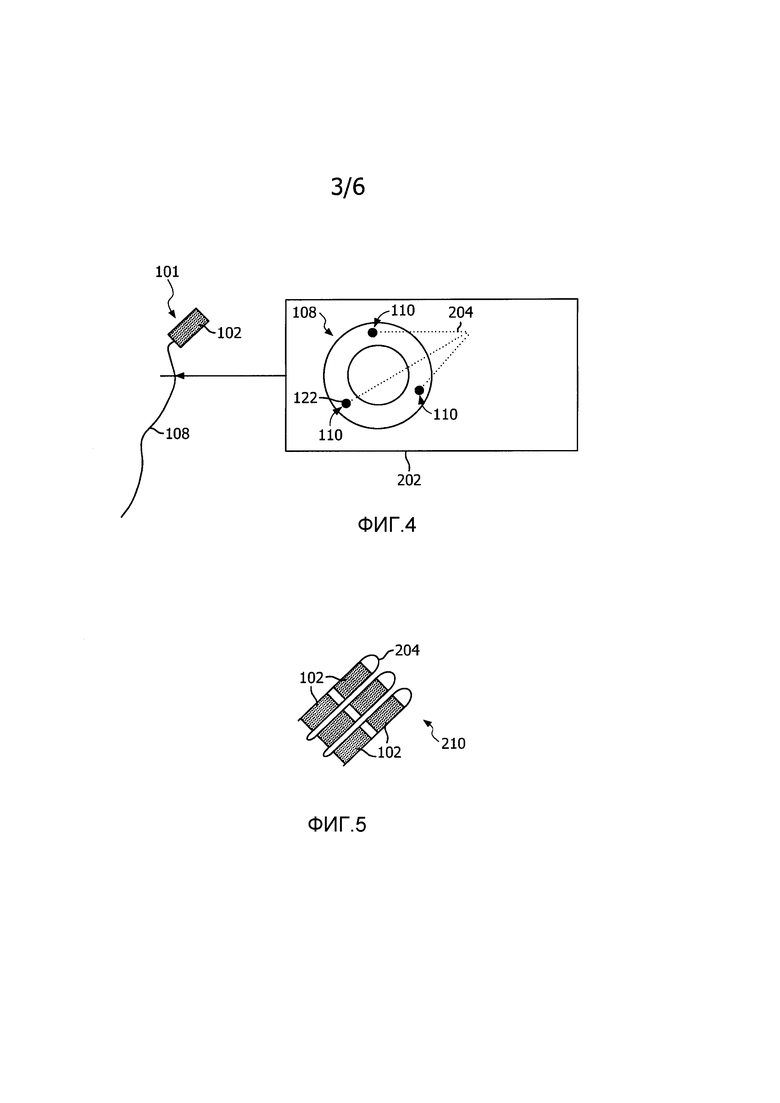
Фиг.4 - схема, представляющая ультразвуковое устройство и сечение кабеля, содержащего узел оптического датчика в соответствии с одним вариантом осуществления;
Фиг.5 - схема, представляющая ультразвуковое устройство, содержащее множество преобразовательных элементов, соединенных с одним узлом оптического датчика в соответствии с другим вариантом осуществления;
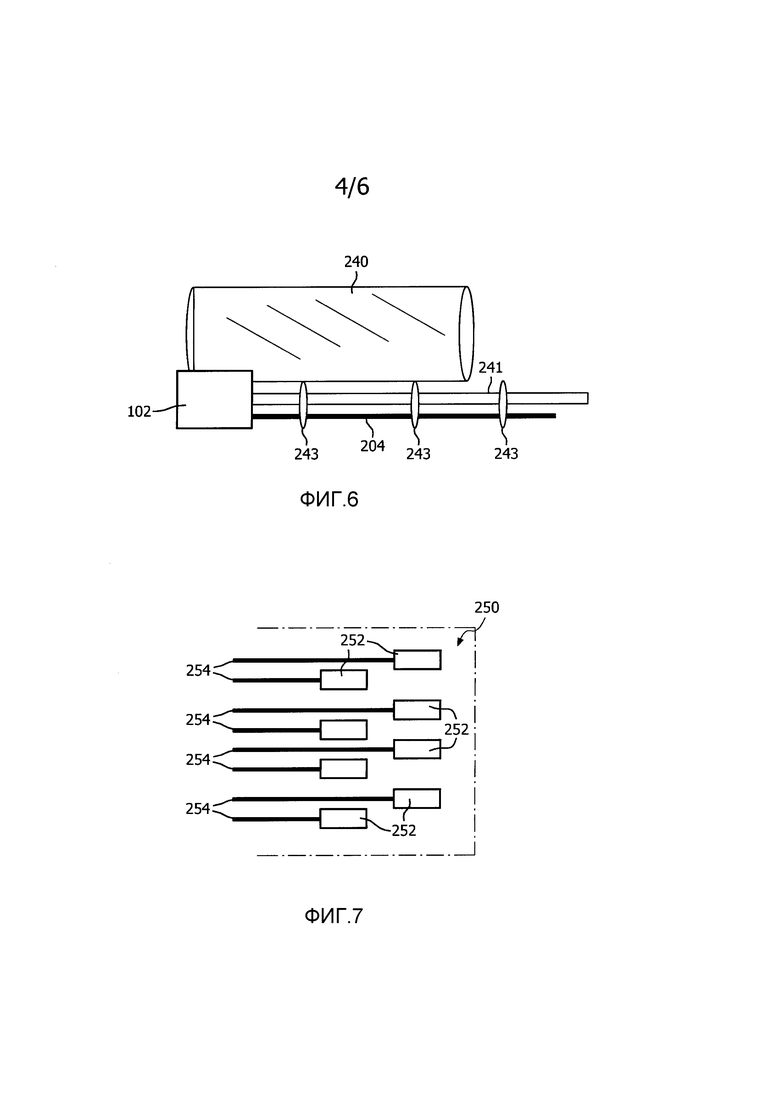
Фиг.6 - схема, представляющая ультразвуковое устройство, соединенное с облегающей оболочкой таким образом, что кабель для ультразвукового устройства и узел оптоволоконного датчика совпадают, в соответствии с другим вариантом осуществления;
Фиг.7 - схема, представляющая ультразвуковое устройство, содержащее множество преобразовательных элементов, каждый из которых соединен со своим собственным узлом оптического датчика, в соответствии с другим вариантом осуществления;
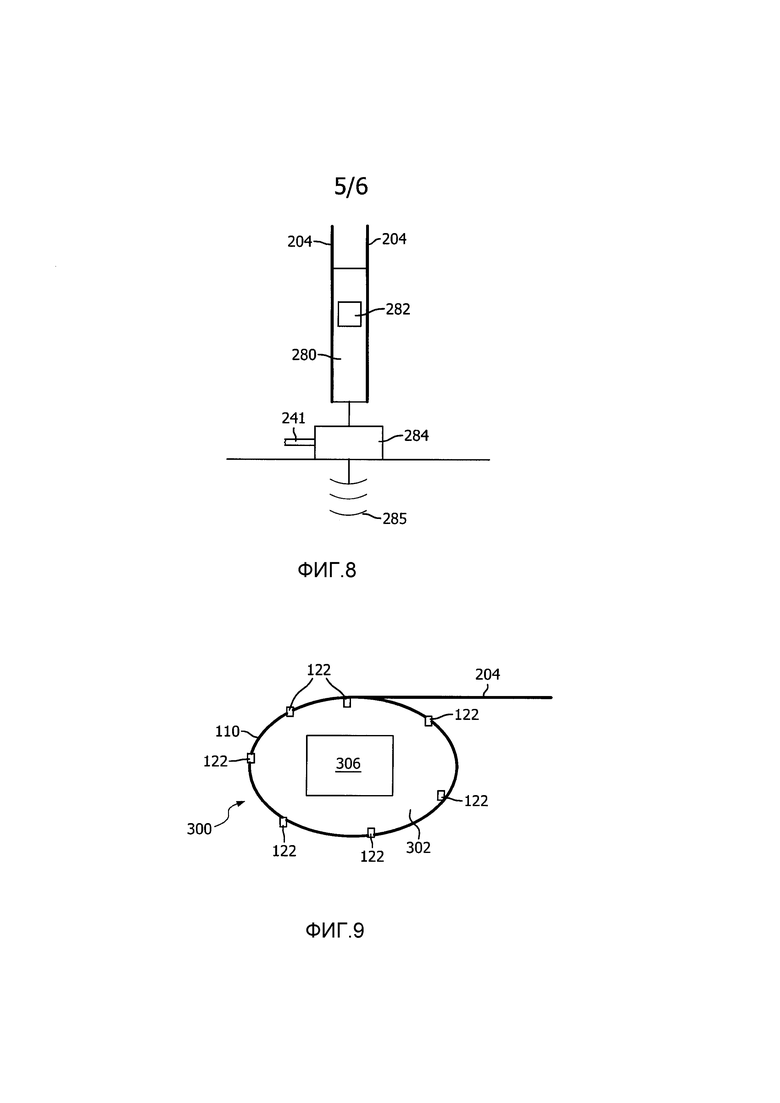
Фиг.8 - схема, представляющая ультразвуковое устройство, медицинское устройство и, по меньшей мере, один узел оптического датчика, используемый для наведения медицинского устройства, в соответствии с другим вариантом осуществления;
Фиг.9 - схема, представляющая оптические датчики, сформированные в виде матрицы, для регистрации прилагаемого давления преобразовательного элемента в соответствии с другим вариантом осуществления; и
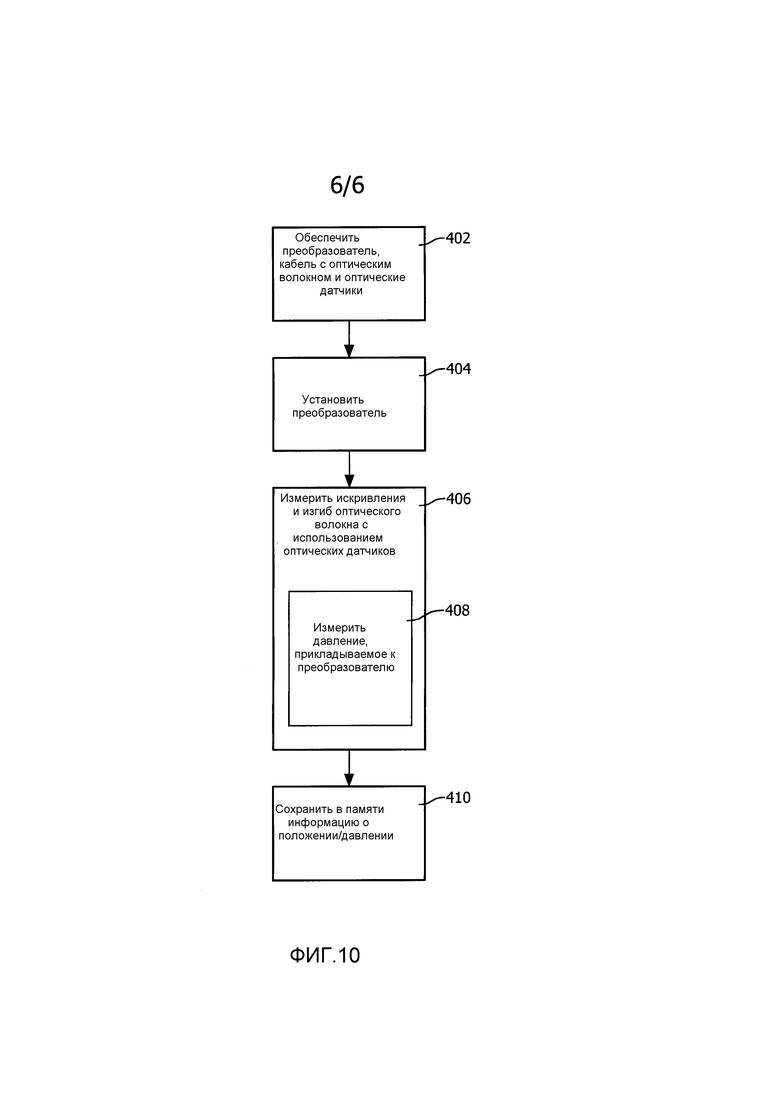
Фиг.10 - блок-схема последовательности операций способа определения положения ультразвукового устройства в соответствии с принципами настоящего изобретения.
Настоящая заявка содержит описание систем и способов для определения положения преобразователей, преобразовательных элементов или нескольких матричных узлов. В особенно подходящем варианте осуществления, местоположение внутрисосудистого ультразвукового преобразователя определяется с использованием волоконно-оптических датчиков. Оптические датчики могут содержать волоконно-оптические брэгговские решетки (FBG). В одном варианте осуществления, ультразвуковая система визуализации с функцией решетки FBG использует возможность определения формы для обеспечения новых возможностей визуализации (например, визуализацию с расширенным полем обзора в реальном времени, пространственное объединение посредством визуализации под несколькими углами, одновременную визуализацию несколькими преобразователями, гибкие матричные/накладные преобразователи, повышение разрешающей способность/улучшение качества изображений путем формирования ультразвукового пучка усовершенствованной формы/реконструкции и т.п.).
Оптическое определение формы с использованием большого числа решеток FBG и оптического опроса допускает высокую пространственно-временную разрешающую способность при слежении за преобразователем(ями) и соответствующими формами кабельной системы/катетеров (например, кабельной системы для трансторакального ультразвукового исследования или ультразвукового исследования всего тела, транспищеводной эхо-визуализации, или катетера для внутрисердечной эхо-визуализации). Для сравнения, обычные методы слежения на основе, например, электромагнитных (ЭМ) явлений, в настоящее время не обеспечивают точности слежения или устойчивости к окружающим условиям, которые возможны при определении положения и ориентации по форме волоконной оптики.
Следует понимать, что описание настоящего изобретения приведено далее на примере медицинских инструментов; однако, принципы настоящего изобретения намного шире и применимы к любым приборам, используемым при отслеживании или анализе комплексных биологических или механических систем. В частности, принципы настоящего изобретения применимы к внутренним ультразвуковым процедурам биологических систем, процедурам во всех зонах тела, например, легких, желудочно-кишечного тракта, других органов, кровеносных сосудах и т.п. Настоящие принципы не обязательно ограничены ультразвуковым зондированием, а применимы также к разработке и применению гибких матриц датчиков, действующих на основе любого другого способа, например, матриц рентгеновских детекторов, сцинтилляционных матриц, катушек для магнитно-резонансного томографа, матриц оптических датчиков (например, отслеживаемого распределения оптических волоконных эндоскопов) и т.п. Элементы, изображенные на фигурах, могут быть реализованы в различных комбинациях аппаратуры и программного обеспечения и обеспечивают функции, которые можно объединить в единственном элементе или нескольких элементах.
Функции различных элементов, показанных на фигурах, можно обеспечить применением специализированной аппаратуры, а также аппаратуры, способной исполнять программное обеспечение, совместно с подходящим программным обеспечением. При обеспечении процессором, функции могут быть обеспечены единственным специализированным процессором, единственным, совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, формально используемый термин «процессор» или «контроллер» не подлежит интерпретации в смысле отношения исключительно к аппаратуре, способной исполнять программное обеспечение и может подразумевать, без ограничения, аппаратуру процессора цифровых сигналов («DSP»), постоянное запоминающее устройство («ROM») для хранения программного обеспечения, оперативное запоминающее устройство («RAM») и энергонезависимое запоминающее устройство.
Кроме того, все формулировки, приведенные в настоящем документе, с перечислением принципов, аспектов и вариантов осуществления изобретения, а также их конкретных примеров предполагают включение в себя как их конструктивных, так и функциональных эквивалентов. Кроме того, предполагается, что упомянутые эквиваленты содержат как эквиваленты, известные в настоящее время, так и эквиваленты, которые будут разработаны в перспективе (т.е. любые разработанные элементы, которые выполняют ту же самую функцию, независимо от конструкции). Таким образом, например, специалистам в данной области техники будет очевидно, что блок-схемы, представленные в настоящей заявке, отражают концептуальные представления о наглядных компонентах и/или схемах системы, воплощающие принципы настоящего изобретения. Аналогично, следует понимать, что любые блок-схемы последовательности операций способа, диаграммы последовательности операций, диаграммы переходов состояний, символический код и т.п. представляют различные способы, которые могут быть, по существу, представлены на компьютерно-читаемых носителях информации и, следовательно, исполняться компьютером или процессором, независимо от того, изображен в явной форме упомянутый компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут быть в форме компьютерного программного продукта, доступного на используемом компьютером или компьютерно-читаемом носителе информации, обеспечивающем программный код для применения или в сочетании с компьютером или любой другой системой исполнения команд. В целях настоящего описания, используемый компьютером или компьютерно-читаемый носитель информации может быть любым устройством, которое может содержать, хранить, передавать, распространять или транспортировать программу для применения или в сочетании с системой, аппаратурой или устройством для исполнения команд. Носитель информации может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или аппаратурой, или устройством) или средой распространения информации. Примеры компьютерно-читаемого носителя информации содержат полупроводниковую или твердотельную память, магнитную ленту, съемный компьютерный гибкий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Современные примеры оптических дисков содержат постоянное запоминающее устройство на компактном диске (CD-ROM), компактный диск с записью и считыванием (CD-R/W) и DVD (универсальный цифровой диск).
В соответствии с полезными вариантами осуществления, следящие датчики для ультразвуковых преобразователей могут использовать множество разных технологий. В соответствии с принципами настоящего изобретения, предлагается описание оптоволоконных технологий. Измерения деформации на основе оптических волокон (далее оптоволоконное измерение) можно осуществлять с использованием оптических датчиков. В одном случае, датчики могут содержать решетки FBG. Посредством объединения результатов измерения деформаций по участку длины можно определять локальную форму участка длины оптического волокна. Оптические измерения геометрической формы представляют интерес, по меньшей мере, по следующим причинам. Измерения устойчивы к электромагнитным помехам и не требуют электромагнитных излучений. Датчики пассивны и, поэтому, по существу, безопасны. Датчики можно объединять в матрицу. Возможно измерение нескольких параметров (деформации, температуры, давления и т.п.). Возможно распределенное измерение, и датчики обладают высокой чувствительностью (вплоть до нанодеформаций, когда при оптическом опросе применяют интерферометрию). Кроме того, волокна имеют малые размеры и малый вес и идеально подходят для минимально инвазивных прикладных задач. Волокна не чувствительны к изменениям амплитуды сигнала (когда используют датчики на основе волоконных брэгговских решеток, с определением длин волн).
Для многих медицинских применений, в частности, требующих минимально инвазивных навигации и инструментария, оптоволоконное измерение с помощью волоконных брэгговских решеток обеспечивает высокую точность и высокую воспроизводимость определения местоположения, с высокой пространственно-временной разрешающей способностью по длине волокна. При малом весе, удлиненном форм-факторе оптического волокна и его компактности в поперечном сечении, волоконная технология обеспечивает усовершенствованные решения для применения при ультразвуковых исследованиях, требующих привязки преобразователей к стойке посредством кабеля, эндоскопического корпуса или катетера (ICE (для внутрисердечной эхокардиографии)). Встраивание волоконных брэгговских решеток в тело кабеля/эндоскопа/корпуса катетера дает возможность высокоточного пространственно-временного сопровождения, по меньшей мере, одного(ной) преобразовательного элемента/матрицы преобразователей внутри удлиненного медицинского инструмента.
На чертежах, на которых одинаковые числовые позиции представляют идентичные или сходные элементы, и, сначала, на фиг.1, наглядно показаны волоконная брэгговская решетка (решетка FBG) 10. В особенно подходящем варианте осуществления, решетка FBG 10 содержит короткий сегмент оптического волокна 12, который отражает свет определенных длин волн и пропускает свет всех остальных длин волн. Данную характеристику обеспечивают периодическим изменением 14 показателя преломления в сердцевине 16 волокна, что создает диэлектрическое зеркало, избирательное к длинам волн. Для наглядности представлен график 20 зависимости показателя преломления сердцевины от расстояния.
Следовательно, волоконную брэгговскую решетку 10 можно применять в качестве встроенного оптического фильтра для задержки некоторых длин волн или в качестве отражателя, избирательного к длинам волн. Входной спектр 22 и соответствующие выходные спектры 24 и 26 наглядно изображают пропускаемый участок (спектр 24) и отраженный участок (спектр 26) входного спектра 22. Фундаментальным принципом работы волоконной брэгговской решетки 10 является френелевское отражение на каждой из границ, где изменяется показатель преломления. Для некоторых длин волн, отраженный свет через различные интервалы оказывается в фазе, и, поэтому, имеет место конструктивная интерференция при отражении, и, следовательно, имеет место деструктивная интерференция при пропускании.
Брэгговская длина волны чувствительная к деформации, а также к температуре. Вышесказанное означает, что брэгговские решетки можно использовать как чувствительные элементы в волоконно-оптических датчиках. В датчике на основе FBG (волоконных брэгговских решеток), деформация вызывает сдвиг ΔλB брэгговской длины волны. Относительный сдвиг ΔλB/λB брэгговской длины волны, обусловленный внесенной деформацией (ε) и изменением температуры (ΔT) выражается приближенной формулой: 
Коэффициент C s называется коэффициентом деформации, и его величина составляет, обычно, около 0,8×10-6/мкε или, в абсолютных величинах, приблизительно 1 пм/мкε). Коэффициент C T описывает температурную чувствительность датчика; данный коэффициент образован температурным коэффициентом расширения и термооптическим эффектом. Его значение приблизительно равно 7×10-6/K (или, по абсолютной величине, 13 пм/K). Хотя, в соответствии с настоящими принципами, решетки FBG особенно пригодны для применения, другие датчики также можно использовать.
Как показано на фиг.2, трехволоконный жгут 30 содержит три волокна 34 и три решетки FBG 32. Одно из преимуществ использования структуры трехволоконного жгута 30 или элемента из нескольких волокон/решеток FBG состоит в том, что по длине волокна можно распределять различные чувствительные элементы. Например, при интегрировании трех сердцевин с различными датчиками (измерителями) по длине волокна, встроенного в конструкцию, можно точно определять трехмерную форму данной конструкции. В разных положениях по длине волокна 34 расположены датчики 32 на основе решеток FBG. По измерению деформации каждой решетки FBG 32 можно вывести кривизну структуры 30 в данном положении в трехмерном пространстве (x, y, z). По множеству измеренных положений определяют общую трехмерную форму.
В предпочтительном варианте, волокна 34 встроены в гибкий материал, например, полимеры медицинского качества (например, PEEK™ (полиэфирэфиркетон)). Сердцевины 35 волокон показаны встроенными на поперечном сечении. Оболочка 36, окружающая волокна, может быть изготовлена из полимеров медицинского качества, силикона или других подходящих материалов.
На фиг.3 представлена примерная система 100 визуализации или лечебного воздействия, с ультразвуковыми преобразователями в соответствии с наглядным вариантом осуществления. Система 100 содержит устройство 101 для медицинской визуализации с обратной связью по наведению, основанной на определении формы. Устройство 101 содержит, по меньшей мере, один преобразовательный элемент 102. Устройство 101 можно использовать для лечебных процедур в других вариантах осуществления. Преобразовательные элементы 102 могут содержать пьезоэлектрические преобразовательные элементы, которые генерируют энергию ультразвуковых волн в ответ на электрические импульсы. Следует понимать, что можно использовать другие формы механической и электромагнитной энергии, и что преобразовательные элементы могут содержать другие конструкции. Преобразовательные элементы 102 могут быть соединены с тележкой/стойкой 104 кабелем 108. Кабель 108 может содержать корпус эндоскопа или другое медицинское устройство, катетер или другой гибкий элемент. Кабель 108 содержит, по меньшей мере, одно встроенное в него волокно 110 с возможностью оптического определения формы для высокоточного определения в реальном времени местоположения преобразовательных элементов 102 и соответствующей кабельной системы (108).
Преобразовательные элементы 102 смонтированы в гибком узле 120. Тележка/стойка 104 содержит ультразвуковую стойку 112, которая сконфигурирована с возможностью подачи энергии для возбуждения преобразовательных элементов 102, которые генерируют ультразвуковые волны. Волокно или волоконные жгуты 110 с возможностью определения формы продолжаются вдоль, по меньшей мере, участка кабеля 108 и связываются со стойкой 104, чтобы обеспечивать в реальном времени точную оценку геометрической формы и динамических характеристик преобразовательных элементов.
Стойка 104 содержит оптическую стойку 116, которая доставляет свет в оптические датчики 122 (например, решетки FBG) волоконных жгутов и получает свет из них. В стойке 116 (или другом месте, при желании) обеспечен источник оптического излучения для подсветки волокна с возможностью определения формы. В стойке 116 обеспечен оптический приемник опрашивающего блока (например, приемопередатчик 117) для считывания мультиплексированных сигналов, возвращающихся от решеток FBG 122 во всех волокнах 110.
Стойка 116 может быть подсоединена к компьютерной системе 130, которая содержит запоминающее устройство 128 и операционную систему 124 с соответствующей программой 132 определения формы, которая вычисляет параметры, относящиеся к искривлению оптических волокон 110. Компьютерная система 130 может содержать стойку 116 или может быть независимой системой. Оптический приемопередатчик 117 передает и принимает оптические сигналы в волокна 110 и из них. Оптические сигналы интерпретируются для определения формы волокна и, тем самым, определения положения или ориентации преобразовательного элемента 102 в теле. Данные из датчиков 122 передаются по оптическим волокнам 110 и могут коррелироваться с 3-мерным объемом или картой, или исходным положением (например, тележки 104) для определения информации о положении преобразовательных элементов 102 или кабеля 108.
Компьютер 130 содержит процессор 131, который реализует способы 132 измерения в реальном времени на основе решеток FBG для измерения искривления волокна и вывода соответствующих форм волоконных жгутов и вычисляет пространственную геометрическую форму, по меньшей мере, одного преобразовательного элемента 102, формирующего протяженную матрицу преобразователей. Компьютер 130 вычисляет пространственно локализованные 3-мерные наборы ультразвуковых данных на основании вычисленной пространственной геометрической формы, по меньшей мере, одного преобразовательного элемента 102. Устройство ввода/вывода (I/O) или интерфейс 152 обеспечивает взаимодействие в реальном времени с компьютером 130, устройством 101 и дисплеем 138 визуализации для пространственно локализованной ультразвуковой визуализации, что дает возможность отображать ориентацию, форму и/или положение кабеля 108. Компьютерная система 130 может содержать пользовательский интерфейс 152 для взаимодействия со стойкой 116, стойкой 112 и устройством 101. Интерфейс 152 может содержать клавиатуру, мышь, систему сенсорного экрана и т.п.
Соединение 154 для передачи данных соединяет ультразвуковую стойку 112, оптический опрашивающий блок 117 и стойку 116 с процессором 131 для определения геометрии/формы преобразователя. Оптический опрашивающий блок или стойка 116 обеспечивает данные определения пространственного местоположения в реальном времени в ультразвуковую стойку 112 для динамической реконструкции пространственно-точных ультразвуковых данных в 3-мерных измерениях для расширения функциональных возможностей. Расширение функциональных возможностей может содержать расширение поля обзора визуализации в реальном времени; динамическое пространственное объединение посредством визуализации под несколькими углами; визуализацию одновременно несколькими преобразователями; повышение разрешающей способности/улучшение качества изображений посредством формирования ультразвукового пучка усовершенствованной формы и реконструкции (например, реконструкции методом ультразвуковой томографии). Гибкий узел преобразовательных элементов 102 можно согласовать по форме с соответствующими анатомическими структурами пациента (например, поверхностью кожи, извилистыми сосудистыми анатомическими структурами, желудочно-кишечным трактом и т.п.). Волокно 110 с возможностью оптического определения формы обеспечивает точное определение положения, по меньшей мере, одного преобразователя 102 друг относительно друга и относительно фиксированного исходного местоположения (например, базы отсчета ультразвуковой стойки) для повышения характеристик визуализации.
На фиг.4 показано устройство 101 в соответствии с одним наглядным вариантом осуществления. В данном варианте осуществления, устройство 101 содержит единственный преобразовательный элемент 102. Преобразовательный элемент 102 связан с кабелем 108, который может содержать катетер, эндоскоп и т.п. Кабель 108 содержит, по меньшей мере, один узел измерения деформаций/формы. Вид 202 представляет сечение кабеля 108. Узел 204 измерения деформаций/формы содержит волокна 110 с датчиками (например, решетками FBG) 122, которые дают возможность оптического измерения деформации и формы. В наглядном варианте осуществления, представленном на фиг.4, измерительный узел 204 содержит трехволоконный жгут для более точного слежения за формой, поворотом и положением волоконных брэгговских решеток. Устройство 101 содержит измерительный узел 204 вместе с ультразвуковыми преобразовательными элементами 102. Таким образом, на основании информации о положении, обеспечиваемой измерительным узлом 204, положения и ориентации преобразовательных элементов 102 можно определять относительно базы отсчета и отслеживать в течение всей процедуры. При этом, зарегистрированные изображения могут содержать информацию о форме/положении вместе с ультразвуковыми изображениями, в реальном времени или для последующего вызова.
Преобразовательные элементы 102 могут содержаться в удлиненном ультразвуковом датчике, например, в ручном, эндоскопическом или катетерном узле, соединенном с ультразвуковой стойкой (104, фиг.3), которая содержит источник оптического излучения и опрашивающий блок (117, фиг.3). Измерительный узел 204 встроен по длине корпуса/кабельной системы 108, чтобы обеспечивать возможность определения местоположения устройства 101, с последующей визуализацией пространственно-отслеживаемых и реконструируемых ультразвуковых данных в 3-х измерениях.
Как показано на фиг.5, ультразвуковой зонд 210 содержит множество преобразовательных элементов 102, расположенных в виде протяженной геометрической формы. Геометрическая форма может содержать одномерное распределение элементов 102 по длине катетера (например, катетера для внутрисердечной эхокардиографии (ICE)), датчика (например, транспищеводного эхокардиографического (TEE) датчика) и т.п. или может содержать многомерный гибкий накладной датчик, который согласуется по форме с анатомическими структурами пациента, (например, гибкий датчик для исследования сонных артерий, который накладывают вокруг шеи пациентов) или любую другую конфигурацию. Другая геометрическая форма может содержать сочетание существующих визуализирующих зондов, например, транспищеводного эхокардиографического (TEE) датчика с катетером для внутрисердечной эхокардиографии (ICE) или катетера для внутрисердечной эхокардиографии (ICE) с датчиком для трансторакальной эхокардиографии (TTE) и т.п. и все остальные размещения. Волоконный узел 204 для оптического измерения формы связывает между собой преобразователи 102 в данном узле для создания возможности высокоточного слежения за относительным перемещением преобразователей. С использованием данной информации, можно собирать информацию о поверхностях тела и другую информацию, вместе с данными ультразвуковой визуализации. Данная конфигурация позволяет оптимизировать сбор и реконструкцию данных с использованием нескольких преобразователей, посредством применения одновременного возбуждения/опроса элементов матрицы в сочетании с информацией о 3-мерном местоположении.
Как показано на фиг.6, варианты осуществления, описанные в настоящей заявке можно применять или соединять для формирования облегающей оболочки 240, которая эластично или другими способами надежного закрепления соединена с ультразвуковым(и) преобразовательным(и) элементом(ами) 102. Преобразовательный элемент 102 зафиксирован относительно оболочки 240. Оболочка 240 может содержать манжету, перчатку и т.п., для прикрепления к телу пользователя или пациента. Оболочка 240 привязана к кабелю 241 для ультразвукового устройства и соединена с ультразвуковой стойкой для подачи питания. Измерительный узел 204 соединен с кабелем 241 с помощью соединителей 243, или, в качестве альтернативы, оболочка 240 может быть расширена, и кабель 241 и узел 204 могут быть уложены внутри оболочки 240, чтобы они совмещались и оставались в данном положении в течении операций или процедур. Таким образом, перемещение преобразовательного элемента 102 определяют совместно с положением кабеля 241, с использованием измерительного узла 204. Для подсветки оптического измерительного узла 204 с тем, чтобы определять деформации в оптическом волокне для обеспечения данных о форме и положении кабеля 241 и, тем самым, преобразовательного элемента 102, используют источник света (не показанный) в исходном положении. Одно из преимуществ данного варианта осуществления состоит в том, что данный вариант осуществления допускает модификацию существующих преобразователей или датчиков.
Как видно из фиг.7, можно применить преобразователь 250 высокоинтенсивного сфокусированного ультразвука (HIFU), независимые элементы 252 которого отслеживаются по отдельности посредством нескольких волокон 254 (например, измерительных узлов 204). Волокна 254 содержат решетки FBG для определения формы и положения и описаны выше. Данный вариант осуществления позволяет идентифицировать положение (и форму) каждого из множества преобразовательных элементов 252 и допускает гибкие геометрические формы, в которых преобразовательные элементы 252 могут быть расположены так, чтобы упомянутые элементы не загораживались костью (например, ребрами) или заполненными воздухом каналами (например, легкими или кишками). Возможность контроля положения упомянутых элементов с погрешностями меньше, чем 500 микрометров, допускает неопределенности по фазе, приблизительно, 1/3 периода. При погрешностях меньше, чем 250 микрометров, можно получать фазировку, которая соответствует аддитивности фаз высокоинтенсивного сфокусированного ультразвука (HIFU), что дает, в результате, возможность нагревания ткани и, следовательно, обеспечивает лечение пациента. Можно также обеспечивать другие виды лечебного воздействия, например, лечебное воздействие ультразвуком и т.п.
Как показано на фиг.8, устройство 280, которое может содержать иглу, катетер и т.п., содержит узел 204 измерения формы с волокнами 110 и датчиками 122 (фиг.3, 4). Устройство 280 визуализируется ультразвуком. В данном варианте осуществления, относительные положения устройства 280 и волокна (204) измеряют с использованием двух оптических волокон (узлов 204) или комбинации оптических волокон и электромагнитных (ЭМ) датчиков 282. Определяют положение устройства и вычисляют угол между устройством 282 и ультразвуковым преобразователем 284. Если устройство 280 расположено с отклонением от перпендикулярности, то предполагается, что большая часть ультразвукового сигнала 285 будет отражаться от преобразователя 284. Однако, некоторая составляющая сигнала будет отражаться к преобразователю 284. При определении относительной ориентации всей длины устройства и преобразователя, можно использовать методы формирования пучка, с использованием которых в процесс суммирования пучка включают только такие каналы, которые, по расчетам, являются перпендикулярными. Кроме того, при наличии данных об относительном положении устройства 280, формирование пучка можно применить только к участку изображения, обеспечивающему оптимизированную визуализацию «жесткого отражателя» и визуализацию «мягкого рассеивателя» в рамках формирования одного и того же изображения.
Как показано на фиг.9, накладка 300 содержит оптическое волокно, ориентированное в виде кольцевой или другой замкнутой или частично замкнутой формы. Накладку 300 размещают на пациенте, с акустическим окном 302 в центре. Деформация кожи под действием давления, оказываемого преобразователем 306, вместе с данными об относительном положении накладки 300 и преобразователя 306 (относительно стойки 104 или 112, фиг.3), будет допускать не только пространственное совмещение, но также воссоздание давления (фактически, деформации), подлежащего приложению к пациенту. Давление (или нажим ультразвукового(ых) преобразователя(ей) 306) часто необходимо для получения оптимальной траектории распространения звуковых волн и обеспечения высококачественного акустического сопряжения с пациентом. Данный вариант осуществления может способствовать обучению менее опытных операторов, обеспечить возможность восстановления акустического изображения для пациентов при контроле состояний; и может применяться в замкнутых контурах обратной связи, например, в робототехническом оборудовании, когда контроллеру должно быть известно, какое давление следует прикладывать к пациенту преобразователем. Следует понимать, что в объеме настоящей формулы изобретения предполагается возможность применения других конфигураций и вариантов осуществления. Настоящие варианты осуществления применимы для всех методов ультразвуковой визуализации при интервенционном применении, с использованием привязки к ультразвуковой стойке.
На фиг.10 представлен способ слежения за положением устройства визуализации, например, ультразвукового преобразователя. На этапе 402 обеспечивают устройство. Устройство содержит преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений по отраженным волнам. С преобразовательным устройством соединен гибкий кабель для обеспечения энергии возбуждения в преобразовательное устройство из стойки, и, по меньшей мере, одно оптическое волокно имеет форму, ориентацию и положение, соответствующие форме, ориентации и положению кабеля во время работы. Обеспечено также множество датчиков, оптически связанных с, по меньшей мере, одним оптическим волокном. На этапе 404, преобразовательное устройство устанавливают. На этапе 406, искривления и изгиб, по меньшей мере, одного оптического волокна соответствуют форме, ориентации и положению кабеля. Искривления и изгиб, которым подвергается кабель, претерпевает также оптическое волокно. Искривления и изгиб оптического волокна используют для определения информации о положении преобразовательного устройства. В предпочтительном варианте, датчики содержат множество волоконных брэгговских решеток, распределенных по длине оптического волокна, и искривления и изгиб измеряются с использованием волоконных брэгговских решеток.
В альтернативных вариантах осуществления, для измерения разных параметров можно использовать разные конфигурации волокон и преобразователей. В одном варианте осуществления, по меньшей мере, одно оптическое волокно содержит множество датчиков, сформированных по замкнутому или частично замкнутому контуру, и способ содержит этап размещения преобразовательного устройства между множеством датчиков, чтобы измерять изменения положения, обусловленные давлением, прикладываемым к преобразовательному устройству, на этапе 408. На этапе 410 можно сохранять информацию о положении (и/или давлении). Информацию о положении и давлении можно сохранять вместе с ультразвуковыми изображениями или изображениями, полученными с использованием других технологий.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) формулировка «содержащий» не исключает присутствия других элементов или действий, кроме тех, которые перечислены в данном пункте формулы изобретения;
b) признак единственного числа, относящийся к элементу, не исключает наличия множества данных элементов;
c) никакие позиции в формуле изобретения не ограничивают объем притязаний формулы;
d) несколько «средств» могут быть представлены одним и тем же объектом или аппаратно- или программно-реализованной конструкцией или функцией; и
e) никакая конкретная последовательность действий не предполагается обязательной, если это не указано.
Выше приведено описание предпочтительных вариантов осуществления устройств, системы и способа для визуализации и лечения с использованием оптического определения положения (которые предназначены для наглядности, а не для ограничения), однако, следует отметить, что специалистами в данной области техники, на основании вышеизложенных принципов, могут быть созданы модификации и внесены изменения. Поэтому, следует понимать, что в конкретные варианты осуществления, представленные в настоящем описании, могут быть внесены изменения, которые не выходят за пределы объема вариантов осуществления, представленные в настоящей заявке, при этом, упомянутые пределы определяются прилагаемой формулой изобретения.
Группа изобретений относится к средствам слежения за формой, положением и ориентацией устройств для визуализации и лечения. Устройство содержит преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений на основании энергии отраженных или проходящих волн, гибкий кабель, соединенный с преобразовательным устройством, по меньшей мере, одно оптическое волокно, имеющее форму и положение, соответствующие форме и положению кабеля во время работы, и множество датчиков, оптически связанных с, по меньшей мере, одним оптическим волокном, при этом датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна и передачи информации для вычисления пространственной геометрии и/или формы преобразовательного устройства. Во втором варианте выполнения устройство дополнительно содержит медицинский инструмент, включающий удлиненное преобразовательное устройство, сконфигурированное с возможностью получения сигналов из стойки и формирования изображений на основании энергии отраженных или проходящих волн. Система слежения за участком устройства содержит пространственно распределенные волоконные брэгговские решетки (решетки FBG), интегрированные на оптическом волокне и расположенные внутри гибкого кабеля, ультразвуковой преобразователь, оптическую систему, сконфигурированную с возможностью доставки света к решеткам FBG и приема света из решеток FBG таким образом, чтобы измерять искривления оптического волокна в гибком кабеле, компьютерную систему, выполненную с возможностью определения формы на основании вычисления параметров, относящихся к искривлениям оптического волокна, и определения конфигурации гибкого кабеля таким образом, что конфигурация гибкого кабеля обеспечивает положение ультразвукового преобразователя. Использование изобретений позволяет повысить разрешающую способность изображения. 3 н. и 12 з.п. ф-лы, 10 ил.
1. Устройство для определения положения, ориентации и/или формы, содержащее:
преобразовательное устройство (102), сконфигурированное с возможностью получения сигналов из стойки (104) и формирования изображений на основании энергии отраженных или проходящих волн;
гибкий кабель (108), соединенный с преобразовательным устройством для обеспечения энергии возбуждения в преобразовательное устройство из стойки;
по меньшей мере, одно оптическое волокно (110), имеющее форму и положение, соответствующие форме и положению кабеля во время работы; и
множество датчиков (122), оптически связанных с, по меньшей мере, одним оптическим волокном, при этом датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна и передачи информации для вычисления пространственной геометрии и/или формы преобразовательного устройства.
2. Устройство по п. 1, в котором множество датчиков (122) содержит волоконные брэгговские решетки, распределенные по длине, по меньшей мере, одного волокна, для измерения деформации.
3. Устройство по п. 1, в котором, по меньшей мере, одно волокно содержит трехволоконный жгут (34).
4. Устройство по п. 1, в котором преобразовательное устройство (210) содержит множество преобразовательных элементов (102), соединенных с одним и тем же оптическим волокном (204), содержащим датчики для определения формы и положения волокна и передачи информации для вычисления динамической геометрической формы преобразовательных элементов любого одного относительно любого другого.
5. Устройство по п. 1, в котором, по меньшей мере, одно оптическое волокно (110) содержит множество датчиков (122), сформированных по замкнутому или частично замкнутому контуру (300), и преобразовательное устройство размещено между множеством датчиков, чтобы измерять изменения положения, обусловленные давлением, прикладываемым к преобразовательному устройству.
6. Устройство по п. 1, в котором преобразовательное устройство (102) содержит множество преобразовательных элементов (252), при этом каждый преобразовательный элемент соединен с соответствующим оптическим волокном, содержащим датчики для измерения искривлений и изгиба оптического волокна.
7. Устройство по п. 1, дополнительно содержащее оболочку (240), при этом преобразовательное устройство (102) прикреплено к указанной оболочке, причем кабель и, по меньшей мере, одно оптическое волокно соединены между собой по их длине таким образом, что форма и положение кабеля соответствует форме и положению, по меньшей мере, одного оптического волокна во время работы.
8. Устройство по п. 1, в котором преобразовательное устройство (102) содержит множество преобразовательных элементов (252), соединенных с, по меньшей мере, одним оптическим волокном, содержащим датчики для измерения искривлений и изгиба оптического волокна, при этом преобразовательные элементы сконфигурированы с возможностью обеспечения лечебного воздействия на пациента.
9. Устройство для определения положения, ориентации и/или формы, содержащее:
медицинский инструмент (280), включающий удлиненное преобразовательное устройство (284), сконфигурированное с возможностью получения сигналов из стойки (104) и формирования изображений на основании энергии отраженных или проходящих волн;
гибкий кабель (241), соединенный с преобразовательным устройством, для обеспечения энергии возбуждения в преобразовательное устройство из стойки;
по меньшей мере, одно оптическое волокно (110), имеющее форму и положение, соответствующие форме и положению удлиненного преобразовательного устройства во время процедуры;
по меньшей мере, одно устройство (282) для определения положения для определения формы и положения удлиненного преобразовательного устройства относительно, по меньшей мере, одного оптического волокна; и
множество датчиков (122), оптически связанное с, по меньшей мере, одним оптическим волокном, при этом датчики сконфигурированы с возможностью измерения искривлений и изгиба оптического волокна и передачи информации на, по меньшей мере, одно устройство для определения положения для вычисления пространственной геометрии и/или формы удлиненного преобразовательного устройства во время процедуры.
10. Устройство по п. 9, в котором множество датчиков (122) содержит волоконные брэгговские решетки, распределенные по длине, по меньшей мере, одного волокна, для измерения деформации.
11. Устройство по п. 9, в котором, по меньшей мере, одно устройство (282) для определения положения содержит что-то одно из другого оптического волокна с оптическими датчиками и электромагнитного датчика.
12. Система слежения за участком устройства визуализации или терапии, содержащая:
пространственно распределенные волоконные брэгговские решетки (решетки FBG) (122), интегрированные на оптическом волокне (110) и расположенные внутри гибкого кабеля (108);
ультразвуковой преобразователь (102), соединенный с ультразвуковой стойкой гибким кабелем;
оптическую систему (116), сконфигурированную с возможностью доставки света к решеткам FBG и приема света из решеток FBG таким образом, чтобы измерять искривления оптического волокна в гибком кабеле;
компьютерную систему (130), выполненную с возможностью:
определения формы на основании вычисления параметров, относящихся к искривлениям оптического волокна, и определения конфигурации гибкого кабеля таким образом, что конфигурация гибкого кабеля обеспечивает положение ультразвукового преобразователя.
13. Система по п. 12, в которой ультразвуковой преобразователь (102) содержит множество преобразовательных элементов (210), соединенных с одним и тем же оптическим волокном, содержащим датчики для определения положения волокна.
14. Система по п. 12, в которой, по меньшей мере, одно оптическое волокно (110) содержит множество датчиков (122), сформированных по замкнутому или частично замкнутому контуру (300), и ультразвуковой преобразователь размещен между множеством датчиков, чтобы измерять изменения положения, обусловленные давлением, прикладываемым к нему.
15. Система по п. 12, в которой ультразвуковой преобразователь (102) содержит множество преобразовательных элементов (252), при этом каждый преобразовательный элемент соединен с соответствующим оптическим волокном, содержащим датчики для определения положения волокна.
| US 2002183592 A1, 05.12.2002 | |||
| US 2009123111 A1, 14.05.2009 | |||
| US 6612992 B1, 02.09.2003 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ НА ОСНОВЕ КВАЗИРАСПРЕДЕЛЕННЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ НА БРЭГГОВСКИХ РЕШЕТКАХ | 2008 |
|
RU2377497C1 |

