Настоящее изобретение относится к медицинскому формированию изображения и, в частности, к системам и способам для картографирования внутренних объемов с использованием комбинации распознавания формы и изображений в ходе медицинских процедур.
Сложные абляционные процедуры, например абляция мерцательной аритмии (AF), обычно осуществляется с использованием систем электроанатомического картографирования (EAM) в сочетании с интервенционной рентгенографией. Были предприняты различные попытки повышения возможностей формирования изображения для абляционного устройства для получения улучшенной обратной связи по формации поражения. С этой целью исследуются ультразвуковое, фотоакустическое, магнитно-резонансное формирование изображения (MRI) или другие методы.
Например, Voyage Medical, Inc. разработало абляционный катетер с возможностями оптического эндоскопического формирования изображения. В ходе абляции можно визуально наблюдать поверхностную денатурацию белков ткани в ходе абляции. Однако современная технология не располагает возможностью опрашивать глубину ткани для оценки трансмуральности поражения.
В соответствии с настоящими принципами предусмотрены системы и способы, которые позволяют совместно осуществлять электроанатомическое картографирование (EAM) и картографирование формации поражения путем добавления аспекта распознавания формы к катетеру или эндоскопу, введенному в тело. В одном варианте осуществления система оптического распознавания формы применяется для отслеживания абляционных устройств с возможностью формирования изображения поражения. Настоящие системы также позволяют быстро получать трехмерные (3D) объемные снимки удлиненного дистального сегмента катетера или эндоскопа. Это обеспечивает окрашенное электронное картографирование 3D объемного пространства и обеспечивает объемные точечные множества, что может облегчать регистрацию и сегментацию массивов данных, полученных во время процедуры или перед процедурой.
Настоящие принципы могут обеспечивать такие преимущества, как, например, улучшенная обратная связь для врача по местоположению и качеству абляционных поражений в анатомии. Более детальная анатомическая карта для абляционных процедур реализуется, включая в себя местоположение и качество поражений. Достигается более быстрая и более точная выборка плотных точечных множеств для анатомического очерчивания. Обеспечивается упрощенное совмещение с данными предоперационного изображения на основании плотных точечных множеств, обеспеченных из распознавания формы.
Система и способ для картографирования интерлюминальных структур включает в себя удлиненный гибкий инструмент. Устройство оптического распознавания формы располагается в гибком инструменте и выполнено с возможностью определения формы гибкого инструмента относительно эталона. Устройство распознавания формы выполнено с возможностью сбора информации на основании своей конфигурации для картографирования интерлюминальной структуры в ходе процедуры. Абляционное устройство с возможностью формирования изображения смонтировано на дистальном концевом участке гибкого инструмента или вблизи него.
Другая система для картографирования интерлюминальных структур включает в себя удлиненный гибкий инструмент и устройство оптического распознавания формы, расположенное в гибком инструменте и выполненное с возможностью определения формы гибкого инструмента относительно эталона. Устройство распознавания формы выполнено с возможностью сбора информации на основании своей конфигурации в ходе процедуры. Абляционное устройство с возможностью формирования изображения смонтировано на дистальном концевом участке гибкого инструмента или вблизи него. Модуль распознавания формы выполнен с возможностью приема информации, собранной устройством распознавания формы, и генерации карты интерлюминальной структуры.
Способ интерлюминального картографирования включает в себя введение удлиненного гибкого инструмента, имеющего устройство оптического распознавания формы, в представляющую интерес область; определение формы гибкого инструмента относительно эталона; сбор информации о поверхностях в представляющей интерес области путем сканирования устройства распознавания формы вдоль поверхности для генерации электроанатомической карты представляющей интерес области; и осуществление процедуры с использованием, по меньшей мере, электроанатомической карты.
Эти и другие задачи, признаки и преимущества настоящего изобретения явствуют из нижеследующего подробного описания его иллюстративных вариантов осуществления, которое подлежит изучению в связи с прилагаемыми чертежами.
В этом раскрытии будет подробно представлено нижеследующее описание предпочтительных вариантов осуществления со ссылкой на следующие фигуры, на которых:
фиг. 1 - схема, демонстрирующая систему для интерлюминального картографирования с использованием устройства оптического распознавания формы в соответствии с настоящими принципами;
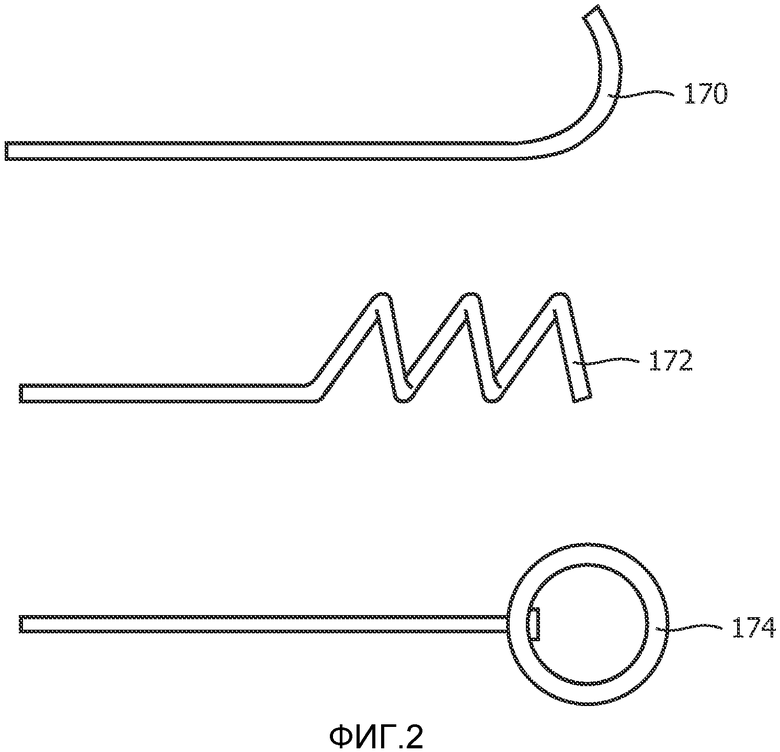
фиг. 2 - схема, демонстрирующая различные конфигурации наконечника катетера, который можно применять для сканирования представляющей интерес области, подлежащей картографированию, в соответствии с настоящими принципами;
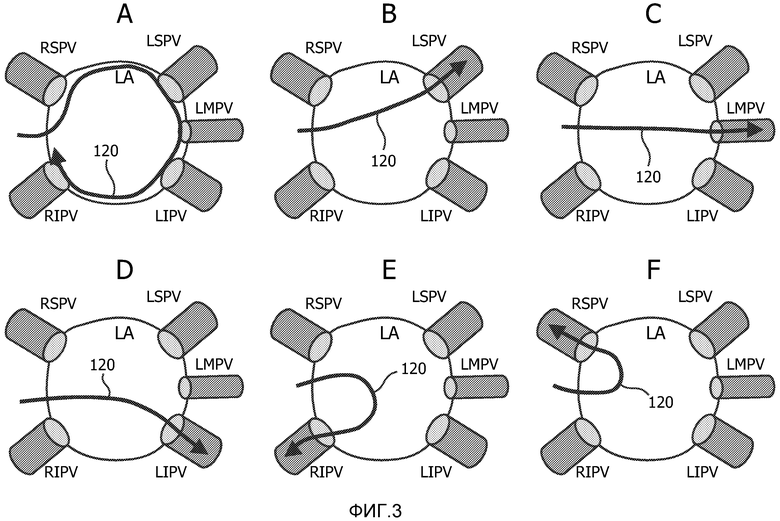
фиг. 3 - схема, демонстрирующая процедуру для сканирования участков левого предсердия сердца для картографирования левого предсердия с использованием устройства оптического распознавания формы в соответствии с настоящими принципами;
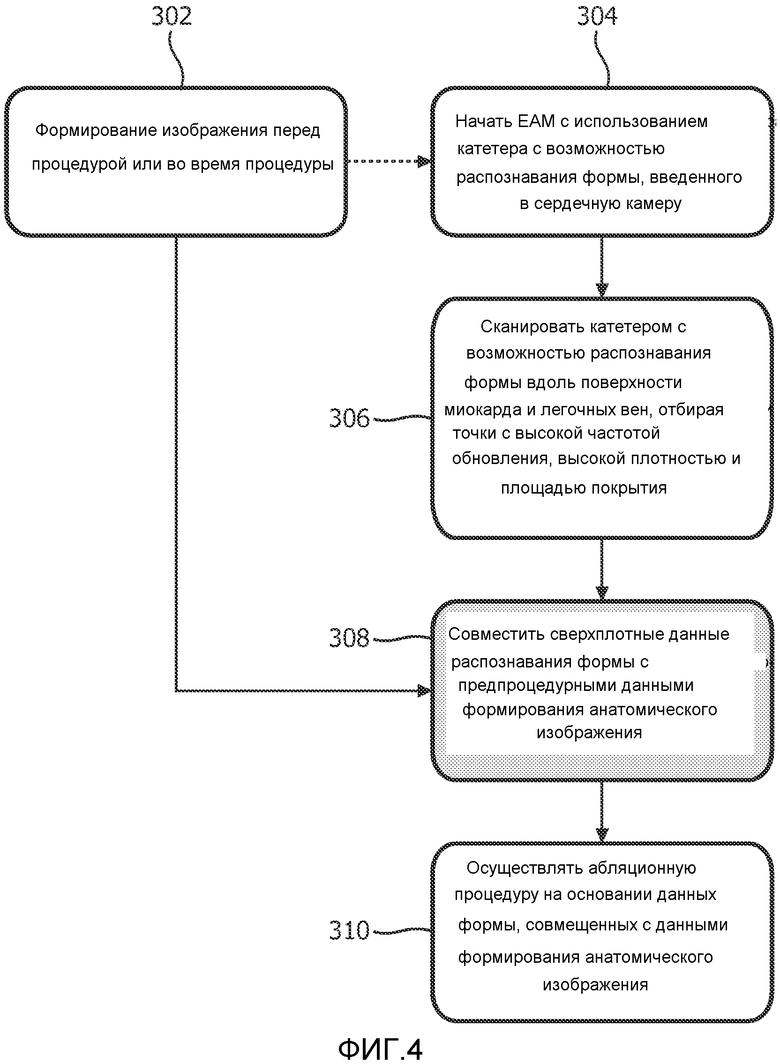
фиг. 4 - блок-схема операций, демонстрирующая иллюстративную/ый систему/способ для электроанатомического картографирования участка сердца в соответствии с одним вариантом осуществления; и
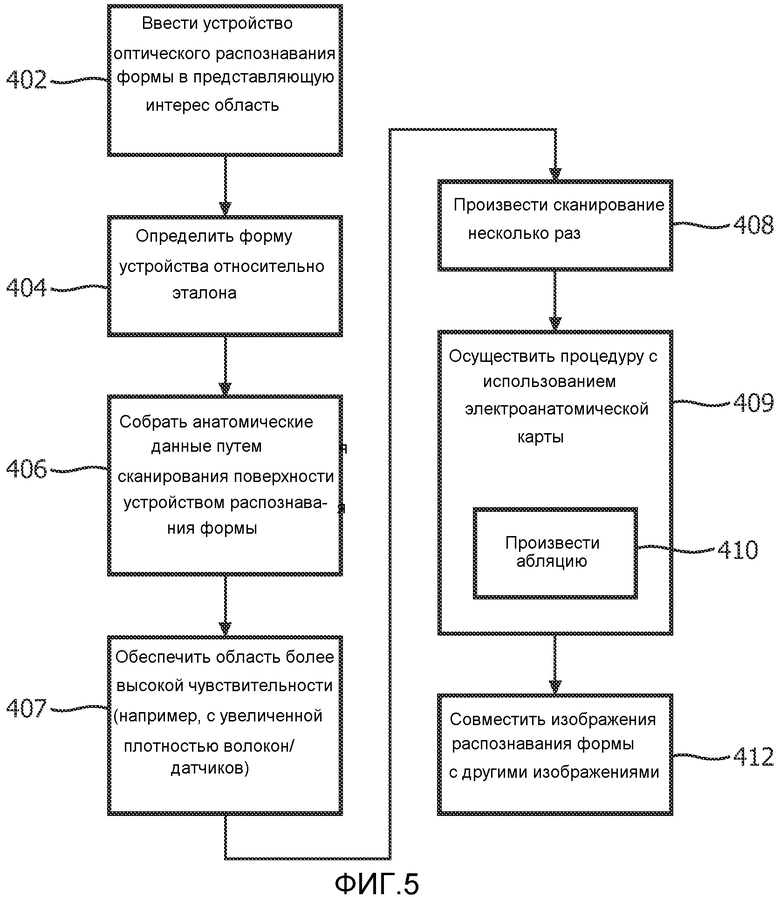
фиг. 5 - блок-схема операций, демонстрирующая этапы электроанатомического картографирования представляющей интерес области в соответствии с иллюстративным вариантом осуществления.
Настоящее раскрытие описывает системы и способы для абляционного устройства с возможностью формирования изображения в сочетании с волоконной системой слежения для оптического распознавания формы, которая образует усовершенствованную абляционную систему, способную генерировать электроанатомические карты в сочетании с информацией качества поражения. Настоящие варианты осуществления используют возможности реконструкции формы оптического считывания объемного определения на основе формы для обработки в режиме реального времени предоперационных и интраоперационных данных формирования 3D изображения.
Сложные абляционные процедуры, например абляция мерцательной аритмии (AF) часто осуществляются с использованием систем электроанатомического картографирования (EAM) в сочетании с интервенционной рентгенографией. В таких системах абляционное устройство получает преимущество повышенных возможностей формирования изображения для получения улучшенной обратной связи по формации поражения. В соответствии с настоящими принципами система объединяет EAM и картографирование формации поражения путем добавления оптического распознавания формы на основе, например, волоконных брэгговских решеток (FBG), релеевского рассеяния или других оптических эффектов или параметров, к абляционным устройствам с возможностью формирования изображения. Включение распознавания формы, распределенного по длине катетера, также допускает инновационное “рисование” позиций наконечника катетера в 3D, что позволяет быстро получать объемные точечные множества, которые можно использовать для облегчения процессов регистрации и сегментации.
Следует понимать, что настоящее изобретение будет описано в отношении оптического распознавания формы с использованием волоконных брэгговских решеток, релеевского рассеяния и т.п.; однако принципы настоящего изобретения гораздо шире и применимы к любым компонентам, которые могут быть смонтированы на, располагаться на или иным образом размещаться на катетере или эндоскопе для отслеживания формы или позиции этого устройства в ходе процедуры. Также следует понимать, что настоящее изобретение будет описано в отношении медицинских инструментов, например абляционных устройств; однако принципы настоящего изобретения гораздо шире и применимы к любым инструментам, применяемым при отслеживании или анализе сложных биологических или механических систем. В частности, настоящие принципы применимы к процедурам внутреннего отслеживания биологических систем, процедурам во всех областях тела, например легких, желудочно-кишечном тракте, выделительных органах, кровеносных сосудах и т.д.
Элементы, изображенные на фигурах, могут быть реализованы в различных комбинациях аппаратного обеспечения и программного обеспечения и обеспечивать функции, которые можно комбинировать в одном элементе или нескольких элементах. Функции различных элементов, показанных на фигурах, можно обеспечивать путем использования специального аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение, совместно с надлежащим программным обеспечением. При наличии процессора функции можно обеспечивать посредством одного специального процессора, одного совместно используемого процессора или множества отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина “процессор” или “контроллер” не следует рассматривать в отношении исключительно аппаратного обеспечения, способного выполнять программное обеспечение, и этот термин может неявно включать в себя, без ограничения, аппаратное обеспечение цифрового сигнального процессора (“DSP”), постоянную память (“ROM”) для хранения программного обеспечения, оперативную память (“RAM”), энергонезависимое хранилище и т.д.
Кроме того, все приведенные здесь утверждения, касающиеся принципов, аспектов и вариантов осуществления изобретения, а также его конкретных примеров, призваны охватывать его структурные и функциональные эквиваленты. Дополнительно, предполагается, что такие эквиваленты включают в себя как известные в настоящее время эквиваленты, так и эквиваленты, которые будут предложены в дальнейшем (т.е. любые разработанные элементы, которые осуществляют ту же функцию, независимо от структуры). Таким образом, например, специалистам в данной области техники очевидно, что представленные здесь блок-схемы представляют принципиальные виды компонентов и/или схемы иллюстративной системы, реализующих принципы изобретения. Аналогично, очевидно, что любые схемы последовательности операций, блок-схемы операций и пр. представляют различные процессы, которые могут быть вещественно представлены в машиночитаемых носителях данных и выполняться компьютером или процессором, независимо от того, показан ли в явном виде такой компьютер или процессор.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступ к которому можно осуществлять с используемого компьютером или машиночитаемого носителя данных, обеспечивающего программный код для использования компьютером или в связи с компьютером или любой системой выполнения инструкций. В целях этого описания, используемый компьютером или машиночитаемый носитель данных может представлять собой любое устройство, которое может включать в себя, сохранять, передавать, распространять или переносить программу для использования системой выполнения инструкций, устройством или приспособлением или в связи с ней. Носитель может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (или устройство или приспособление), или среду распространения. Примеры машиночитаемого носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, сменную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), жесткий магнитный диск и оптический диск. Современные примеры оптических дисков включают в себя компакт-диск с возможностью только чтения (CD-ROM), компакт-диск с возможностью чтения/записи (CD-R/W) и DVD.
Обратимся к чертежам, на которых сходные ссылочные позиции представляют одинаковые или аналогичные элементы, и первоначально к фиг. 1, где проиллюстрирована система 100 оптического эндоскопа или катетера.
Система 100 включает в себя эндоскоп или устройство 102, например катетер, оптоволоконный эндоскоп или эндоскоп с камерой 108, применяемый при наблюдении или взаимодействии с внутренними полостями и, в частности, кровяными или воздушными каналами в живом организме. Эндоскоп или устройство 102 включает в себя гибкий кабель 104, который может включать в себя оптическое волокно для переноса визуальных изображений. Устройство 102 может включать в себя рабочий канал 109 на протяжении своей длины для аспирации или ввода инструментов. Наконечник 106 на дистальном концевом участке кабеля 104 включает в себя камеру 108 и, по меньшей мере, один источник 110 света. В зависимости от системы источник 110 света может быть закреплен на концевом участке устройства 102 или свет может передаваться от проксимального конца кабеля или другого гибкого инструмента 104 по оптоволоконной линии связи. Наконечник 106 также может включать в себя другие инструменты или насадки в зависимости от применения и процедуры. Оптоволоконный эндоскоп или устройство 102 может включать в себя камеру на приборах с зарядовой связью (ПЗС) на проксимальном конце кабеля 104, тогда как видеоэндоскоп может включать в себя ПЗС-камеру, установленную вблизи наконечника 106 или на нем.
Свет, отраженный 111 от стенок внутренних тканей 122, улавливается и распространяется по кабелю 104 в виде оптических (или электрических) сигналов. Сигналы интерпретируются, предпочтительно, с использованием процессора или устройства 114 обработки, например компьютера или другой платформы, снабженной светочувствительным устройством 116 в случае удаленно расположенной камеры. Светочувствительное устройство 116 может быть смонтировано на печатной плате, может быть включено в состав устройства камеры (например, ПЗС-камеры) или может быть встроено в кристалл интегральной схемы. Для дешифровки и интерпретации оптических сигналов можно применять разнообразные конфигурации и реализации. Если камера включена в наконечник 106, сигналы преобразуются в электрические сигналы и интерпретируются устройством обработки без светочувствительного устройства 116. Другие конфигурации могут включать в себя ультразвуковое формирование изображения и т.п.
Абляционный(е) электрод(ы) 117 могут быть обеспечены на дистальном концевом участке устройства 102. Электроды 117 могут иметь разнообразные конфигурации и могут быть втягивающимися. Контроллер 161 абляции можно применять для подачи энергии и иного управления процессом абляции (например, с использованием РЧ-энергии или электрического тока).
Устройство 102 предпочтительно включает в себя гибкий удлиненный инструмент, который позволяет множеству оптических волокон 152, снабженных датчиками 154, например установке FBG, собственного релеевского рассеяния или любого другого оптического распознавания формы, проходить продольно вдоль длины устройства 102. Одновременные измерения деформации вследствие изгибания устройства 102 можно измерять и сегментальное движение устройства 102 можно отслеживать. Одновременные измерения можно производить распределенным образом для определения конфигурации и формы устройства 102 в течение времени. Деформация устройства 102 будет отслеживаться для измерения биологической ткани в ходе процедуры, например мониторинга деформаций, вызванных тканью в оптоволоконной отслеживающей системе в свернутом в петлю катетере для оценивания электромеханической синхронности или для оценивания влияния вмешательства на сократительную способность сердечной мышцы. Таким образом, можно устанавливать корреляцию отклонения, испытываемого устройством 102, с деформациями ткани, окружающей устройство 102, для создания объемной карты.
Устройство 102 включает в себя датчики 154 деформации, которые располагаются по удлиненной секции устройства 102. Система распознавания формы будет иметь много (например, тысячи) датчиков 154 деформации, образованных FBG или шаблонами собственного релеевского рассеяния конечных сегментов оптического волокна 152. Также можно применять другие количества волокон и датчиков.
Оптическое распознавание формы может базироваться на датчиках на основе оптоволоконной брэгговской решетки. Оптоволоконная брэгговская решетка (FBG) является коротким сегментом оптического волокна, который отражает конкретные длины волны света и пропускает все остальные. Это достигается путем добавления периодического изменения показателя преломления в сердцевине волокна, которое генерирует диэлектрическое зеркало, зависящее от длины волны. Это позволяет использовать оптоволоконную брэгговскую решетку как встроенный оптический фильтр для блокировки определенных длин волны или как отражатель, зависящий от длины волны. Оптоволоконная брэгговская решетка работает по принципу френелевского отражения на каждой из границ раздела, где показатель преломления изменяется. Для одних и тех же длин волн, отраженный свет различных периодов находится в фазе друг с другом, поэтому существует конструктивная интерференция для отражения и, следовательно, деструктивная интерференция для пропускания. Брэгговская длина волны чувствительна к деформации, а также к температуре. Это означает, что брэгговские решетки можно использовать как чувствительные элементы в волоконных оптических датчиках. В датчике на основе FBG измеряемая величина (например, деформация) вызывает сдвиг брэгговской длины волны.
Одно из основных преимуществ этого подхода состоит в том, что различные чувствительные элементы могут распределяться по длине волокна. Включение трех или более сердцевин с различными датчиками (измерительными приборами) вдоль длины волокна, которое внедрено в структуру, позволяет точно определять трехмерную форму такой структуры. Вдоль длины волокна, в различных позициях, в большом количестве располагаются датчики на основе FBG (например, три или более чувствительных сердцевин волокон). Из измерения деформации каждой FBG можно вывести кривизну структуры в этой позиции. Из большого количества измеренных позиций определяется полная трехмерная форма. В порядке альтернативы оптоволоконным брэгговским решеткам можно использовать собственное обратное рассеяние в оптических волокнах. Один такой подход предусматривает использование релеевского рассеяния в стандартном одномодовом коммуникационном волокне. Релеевское рассеяние происходит в результате случайных флуктуаций показателя преломления в сердцевине волокна. Эти случайные флуктуации можно смоделировать как брэгговскую решетку со случайным изменением амплитуды и фазы по длине решетки. Благодаря использованию этого эффекта в 3 или более сердцевинах, проходящих в единичном отрезке многосердцевинного волокна, можно отслеживать 3D форму и динамику представляющей интерес поверхности.
Волокна 152 вводятся в корпус инструмента 102 с плотной последовательностью волоконных брэгговских решеток 154 или сегментов шаблона собственного релеевского рассеяния оптического волокна, пространственно распределенных на протяжении его длины и/или кластеризованных в функциональных областях инструмента. Датчики 154 могут формировать матрицу для сбора данных по области. Каждое волокно 152 может включать в себя один или более датчиков 154. Устройство оптического распознавания формы (например, волокна 152 и решетки 154) может включать в себя области более высокой чувствительности за счет включения области с увеличенным количеством оптических волокон, имеющих оптоволоконные брэгговские решетки (FBG) или сегменты релеевского рассеяния.
Датчики 154 могут включать в себя не имеющие покрытия FBG или сегменты релеевского рассеяния для распознавания формы. Можно применять и другие оптические или электронные датчики. Устройство 102 может включать в себя оптический модуль, FBG, модуль 119 релеевского рассеяния и т.п. для обнаружения освещения волокна и приема сигналов волокна. Источник модуля 119 может находиться на проксимальном концевом участке устройства и переносить свет в волокно 152 и из него. Модуль 119 принимает и обрабатывает оптические сигналы для использования с другими аспектами системы 100, включающими в себя распознавание формы.
Модуль 119 можно применять для считывания мультиплексированных сигналов, возвращающихся из волокон 154 оптического распознавания формы во всех волокнах 152. Вычислительное устройство 114 может включать в себя программу 156 реконструкции в реальном времени для распознавания формы волокна и объемного картографирования. Вычислительное устройство или консоль 114 выполнено(а) с возможностью взаимодействия в реальном времени и визуального отображения местоположения и пространственно распределенных измерений инструмента (например, биофизических измерений, полученных из деформации, видео или другие данные формирования изображения на основе эндоскопа, видео или другие данные формирования изображения на основе катетера).
Устройство 102 может, в необязательном порядке, включать в себя другие признаки, например традиционные датчики, или может включать в себя механизм стабилизации / фиксации для удержания точки на чувствительном волокне в фиксированном положении относительно опорного представляющего интерес местоположения (например, баллона с перфорациями или без них, допускающего течение за пределы точки фиксации). Можно обеспечить и другие функции.
Устройство 102 можно применять совместно с данными формирования изображения, полученными либо перед процедурой, либо во время процедуры, либо одновременно с оптическим опросом. Формирование изображения и записи оптических данных можно использовать совместно для улучшения оценок биофизических параметров, информации картографирования, характеристик инструмента и свойств ткани для принятия решений относительно управления интервенционной процедурой и мониторинга прогресса лечения.
Система 100 включает в себя соединение 121 к устройству 102 или от него для вывода оптического опроса для обеспечения считывания формы волокна, обеспечения мощности для других функций (например, абляции и т.д.) и передачи и приема любых других сигналов. По соединению 121 могут переноситься полученные данные инструмента, например видео в реальном времени (например, от видеоэндоскопа), ультразвук в реальном времени (например, от интракардиального эхокардиографа, катетера ICE), свет для FBG, шаблоны релеевского рассеяния и т.д. Через соединение 121 на механизмы инструментальной терапии (например, электрод 117) подается мощность, например РЧ-мощность для РЧ абляционного катетера и т.д. Соединение 121 с инструментом 102 с возможностью распознавания формы также обеспечивает информацию для системы 125 медицинского формирования изображения или из нее. Через соединение 121 может осуществляться обмен сигналами обратной связи и управления. Например, навигацию инструмента можно применять в качестве обратной связи на основании опроса распознавания формы для помощи при введении инструмента 102. Кроме того, сигналы обратной связи или управления можно применять для объемного картографирования на основании опроса оптического распознавания формы.
Система 100 может включать в себя множественные обрабатывающие или вычислительные устройства 114 для генерации сигналов управления, осуществления вычислений, генерации видеоизображений, интерпретации обратной связи и т.д. Например, обработка распределенных измерений оптической формы позволяет картографировать сегмент внутренних областей пациента. В особо полезных вариантах осуществления сегменты устройства 102 могут отслеживать путь сканирования датчиков, картографируемых для обеспечения объемной карты внутренней анатомии пациента. Поверхности, задействованные в ходе процедуры, например деформации оптических волокон, обусловленные тканью, можно обеспечивать как обратную связь по размерам внутренних проходов и полостей внутри пациента. Эта информация обеспечивает карту, указывает местоположение поражения, чтобы поражение можно было позднее локализовать, и обеспечивает эталон для оценивания изменений поражения с течением времени или в результате лечения.
Пользователь может сохранять данные в памяти 120. Память 120 может включать в себя программы (например, программу 156). Программу 156 можно адаптировать для приема измерений и управления датчиками (например, FBG, сегментами релеевского рассеяния). Дисплей 124 можно обеспечить для визуализации процедур и/или для взаимодействия с консолью 114 и устройством 102 в ходе процедуры. Пользователь может использовать пользовательский интерфейс 166 для взаимодействия с консолью 114 и/или устройством 102. Интерфейс 166 может включать в себя клавиатуру, мышь, систему сенсорного экрана и т.д.
Устройство обработки или консоль 114 может представлять собой или включать в себя компьютерное устройство, процессор или контроллер 130, выполненное(ый) с возможностью выполнения программы 156 или других программ. Программа 156 включает в себя инструкции для интерпретации и осуществления функций в соответствии с настоящими принципами. Программа 156 включает в себя признак распознавания формы, который определяет и интерпретирует позиции датчиков, например для оптоволоконных брэгговских решеток (FBG) 154 или сегментов собственного релеевского рассеяния оптического волокна и т.п.
Признаки программы 156 могут включать в себя программу 123 анализа для идентификации внутренних структур и признаков на основании обратной связи от оптических датчиков 154 формы. Анатомические эталоны 112 также могут распознаваться и сохраняться в качестве эталонов 126 в памяти 120. Эти эталоны 126 можно сравнивать с ранее полученной (например, перед операцией) 3D топологической картой. Топологическое картографирование можно сравнивать с атласом анатомии пациента или общей анатомической моделью. Качественную форму представляющей интерес области можно получить с использованием изображений от камеры 108 и распознавания формы устройства 102 с использованием оптического опроса, обеспечиваемого программой 156.
В особо полезном варианте осуществления устройство 102 включает в себя абляционный(ое) катетер/устройство с возможностью формирования изображения поражения в сочетании с отслеживанием оптического распознавания формы. Использование признаков устройства 102 и консоли 114 позволяет реализовать усовершенствованную систему картографирования для сложных абляционных процедур, выполняемых на сердце. Волокно 152 оптического распознавания формы встроено в устройство 102 для отслеживания катетера по протяженной длине от дистального наконечника. Отслеживаемое устройство 102 можно использовать для генерации электроанатомических карт, где информация о глубине абляции поражения визуализируется с использованием камеры 108 на анатомической поверхности.
В одном варианте осуществления модифицированная конфигурация для интеграции оптического распознавания формы в абляционный катетер с возможностью мониторинга может включать в себя ввод оптического волокна с возможностью распознавания формы в оросительный канал или рабочий канал 109 устройства 102, с одновременным производством надлежащих измерений на проксимальном конце катетера для отделения жидкостей от оптоволоконного соединения. Традиционные системы EAM обычно требуют наличия катушки с шестью степенями свободы (DOF) на наконечнике абляционного катетера, который отслеживается электромагнитным образом. Это усложняет наконечник устройства и требует утомительного и долговременного отбора отдельных точек в анатомии. В других системах EAM применяется большое количество электродов, которые отслеживаются внутри сердца с использованием измерений импеданса. Хотя этот процесс осуществляется быстрее, чем с использованием катушки, отбор точек в анатомии оказывается менее точным.
В соответствии с настоящими принципами использование отслеживания оптического распознавания формы позволяет с высокой точностью распознавать форму на протяжении значительной длины катетера. Это распознавание формы можно использовать для быстрой и высокоточной выборки плотного точечного множества в представляющей интерес анатомической структуре, что позволяет быстро определять анатомическую карту.
В соответствии с настоящими принципами устройство оптического распознавания формы, интегрированное с абляционным/картографическим катетером, позволяет быстро получать 3D объемные снимки дистального сегмента или других сегментов катетера. Это позволяет эффективно осуществлять “рисование” или поверхностное картографирование детализированных, сверхплотных объемных точечных множеств, что может облегчать регистрацию и сегментацию массивов данных, полученных во время процедуры или перед процедурой.
Согласно фиг. 2 различные формы или конфигурации катетера позволяют ускорять опрос анатомии полости. Эти формы могут включать в себя, например, петли, спирали, кольца и т.д. самого катетера, которые можно отслеживать более точно и с более плотной пространственной выборкой. В примерах, показанных на фиг. 2, петли 170, спирали 172 и кольца 174 изображены иллюстративно. Поведением в реальном времени формы дистального наконечника может управлять врач для обеспечения новых режимов взаимодействия с системой формирования изображения (например, чтобы врач мог вводить систему на основе формы катетера).
Одиночные абляционные катетеры с упреждающим мониторингом (устройство 102 на фиг. 1) пользуются преимуществом интеграции оптического распознавания формы, поскольку форму дистального конца катетера можно использовать для оптимального направления наконечника катетера к ткани (например, поражению 164) и получения углов контакта, например, 90±20 градусов.
Совмещение интраоперационных или предоперационных анатомических сеток (например, вращательной рентгенографии или КТ) с интраоперационно полученными анатомическими картами (точечными множествами) может осуществляться с использованием, например, итерационного алгоритма ближайшей точки (ICP). Высокоточную информацию, полученную оптическим распознаванием формы, можно использовать для улучшения совмещения за счет адресного опроса ключевых анатомических ориентиров, задающих форму (например, областей с большой кривизной поверхности, например, анатомического выступа, например, на легочных венах или границах левого предсердия).
Согласно фиг. 3 подход к картографированию левого предсердия (LA) проиллюстрирован в соответствии с одним примерным вариантом осуществления. Катетер 102, отслеживаемый посредством оптического распознавания формы, вставляется в левое предсердие (LA), и шесть различных конфигураций (с A по F) осуществляется для картографирования области. В конфигурации A петля формируется внутри полости для задания поперечных границ LA и затем вставляется в каждую отдельную легочную вену (с B по F) для определения базовых геометрий формы полости. Следующее соглашение применяется для задания легочных вен (PV) на фиг. 3. R = правая, L = левая, S = верхняя, I = нижняя, и M = средняя. Конфигурация катетера 102, отслеживаемого посредством оптического распознавания формы, дает точки данных известной позиции для обеспечения картографирования LA. Следует понимать, что можно применять другие анатомические признаки и шаблоны получения.
Согласно фиг. 4 описан иллюстративный способ для картографирования сердечной полости. В блоке 302 применяется формирование изображения перед процедурой или во время процедуры. Оно может включать в себя рентгенографию, MRI, КТ и т.д. В блоке 304 начинается EAM с использованием катетера с возможностью распознавания формы или аналогичного инструмента, введенного в сердце или другую структуру. В блоке 306 производится сканирование катетером с возможностью распознавания формы вдоль поверхности структуры, например миокарда, легочных вен и т.д. В ходе сканирования, анатомические точки отбираются с высокой частотой обновления, высокой плотностью и площадью покрытия. В блоке 308 точки, отобранные катетером с возможностью распознавания формы, регистрируются с формированием изображения в блоке 302. В блоке 310 абляция или другая процедура может осуществляться с использованием данных формы (блок 306), зарегистрированных с анатомическими данными формирования изображения (блок 302). Это обеспечивает более точное и оперативное представление внутренних тканей. В особо полезных вариантах осуществления, осуществляются сложные абляционные процедуры в сердечной электрофизиологии. Также обеспечивается быстрое анатомическое картографирование сосудистых или эндолюминальных пространств для планирования интервенционных процедур восстановления (например, AAA восстановление, NOTES процедуры).
На фиг. 5 изображен способ интерлюминального картографирования в соответствии с одним иллюстративным вариантом осуществления. На блоке 402 удлиненный гибкий инструмент, имеющий устройство оптического распознавания формы, вводится в представляющую интерес область. В блоке 404 форма гибкого инструмента определяется относительно эталона. Информация о поверхностях в представляющей интерес области собирается путем сканирования устройства распознавания формы вдоль поверхности для генерации электроанатомической карты представляющей интерес области в блоке 406. В одном варианте осуществления, электроанатомическая карта генерируется с использованием оптических сигналов из, по меньшей мере, одного оптического волокна, имеющего оптоволоконные брэгговские решетки (FBG) или сегменты измерения собственного релеевского рассеяния для регистрации деформации в, по меньшей мере, одном волокне.
В блоке 407 область более высокой чувствительности может быть обеспечена на участке устройства оптического распознавания формы за счет включения области с увеличенным количеством оптических волокон, и/или оптоволоконных брэгговских решеток (FBG), и/или опроса релеевского рассеяния и т.п. В блоке 408 сканирование устройства распознавания формы может включать в себя контактирование поверхности с устройством распознавания формы в различных конфигурациях для обеспечения карты. Карту можно применять для возвращения в позицию в представляющей интерес области.
В блоке 409 процедура осуществляется с использованием, по меньшей мере, электроанатомической карты. Удлиненный гибкий инструмент может включать в себя абляционное устройство с возможностью формирования изображения, смонтированное на дистальном концевом участке гибкого инструмента или вблизи него, и осуществление процедуры включает в себя абляцию ткани в представляющей интерес области, в блоке 410. В блоке 412 изображения, сформированные во время процедуры или перед процедурой, регистрируются и/или сегментируются с картой или с ее использованием, которая генерируется с использованием устройства распознавания формы.
При интерпретации нижеследующей формулы изобретения следует понимать, что:
a) слово "содержащий" не исключает наличия других элементов или действий помимо перечисленных в данном пункте;
b) употребление названия элемента в единственном числе не исключает наличия множества таких элементов;
c) никакие ссылочные позиции в формуле изобретения не ограничивают ее объем;
d) несколько "средств" может быть представлено одним и тем же элементом, или аппаратным обеспечением, или программно-реализованной структурой, или функцией; и
e) не предусмотрено никакой конкретной последовательности действий, если специально не указано обратное.
Описав предпочтительные варианты осуществления для картографирования в медицинских процедурах (которые рассматриваются как иллюстративные и не ограничительные), заметим, что специалисты в данной области техники, в свете вышеизложенных принципов, могут предложить модификации и вариации. Поэтому следует понимать, что изменения могут касаться конкретных вариантов осуществления изобретения, которые отвечают объему раскрытых здесь вариантов осуществления, определенному нижеследующей формулой изобретения. Таким образом, исходя из описанных деталей и конкретных требований патентным законодательством, то, что заявлено и желаемо быть защищенным патентом на изобретение, изложено в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕРВЕНЦИОННЫЕ ИНСТРУМЕНТЫ С ПОДДЕРЖКОЙ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ БЫСТРЫХ РАСПРЕДЕЛЕННЫХ ИЗМЕРЕНИЙ БИОФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2577509C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ И ЛЕЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 2011 |
|
RU2589625C2 |
| МНОГОЦЕЛЕВАЯ КОНСТРУКЦИЯ ПРОСВЕТА ДЛЯ ОПТИЧЕСКОГО ВОСПРИЯТИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ | 2014 |
|
RU2689023C2 |
| НАВИГАЦИЯ С ПОМОЩЬЮ ОПТОВОЛОКОННОГО ДАТЧИКА ДЛЯ ВИЗУАЛИЗАЦИИ И МОНИТОРИНГА СОСУДОВ | 2013 |
|
RU2686954C2 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| УСТРОЙСТВО ОПТИЧЕСКОГО МОНИТОРИНГА ДЛЯ МОНИТОРИНГА ЗНАЧЕНИЯ КРИВИЗНЫ ГИБКОГО МЕДИЦИНСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2627061C2 |
| ИНФОРМАЦИЯ О ВВОДЕ И ВЫВОДЕ МЕДИЦИНСКОГО УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ РАСПРЕДЕЛЕННОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ОПТИЧЕСКИМ ВОЛОКНОМ | 2012 |
|
RU2628638C2 |
| АППАРАТ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2011 |
|
RU2588290C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| ГОЛОГРАФИЧЕСКИЕ ПОЛЬЗОВАТЕЛЬСКИЕ ИНТЕРФЕЙСЫ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2012 |
|
RU2608322C2 |
Изобретение относится к медицинской технике, а именно к системам для картографирования внутренних объемов. Система содержит удлиненный гибкий инструмент, устройство оптического распознавания формы, расположенное в гибком инструменте, причем устройство распознавания формы выполнено с возможностью сбора анатомической информации, касающейся интерлюминальной структуры, и абляционное устройство с возможностью формирования изображения, смонтированное на дистальном конце гибкого инструмента или вблизи него. Второй вариант выполнения системы дополнительно содержит модуль распознавания формы, выполненный с возможностью приема информации и генерации электроанатомической объемной карты трехмерной области интерлюминальной структуры. Изобретение позволяет улучшить обратную связь для врача по местоположению и качеству абляционных поражений в анатомии. 2 н. и 11 з.п. ф-лы, 5 ил.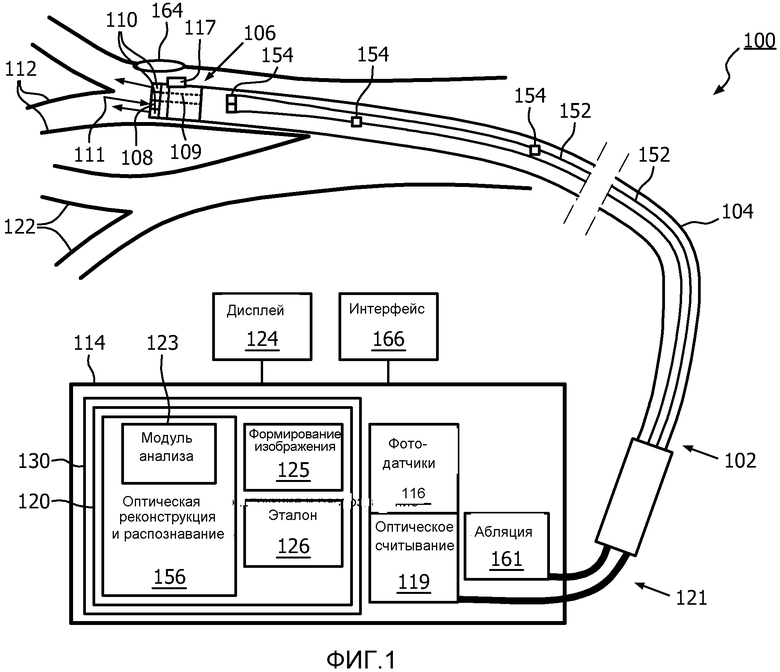
1. Система для картографирования интерлюминальных структур, содержащая:
удлиненный гибкий инструмент (102),
устройство (152, 154) оптического распознавания формы, расположенное в гибком инструменте и выполненное с возможностью определения формы удлиненной части гибкого инструмента по протяженной длине от дистального наконечника гибкого инструмента относительно эталона, причем устройство распознавания формы выполнено с возможностью сбора анатомической информации, касающейся интерлюминальной структуры, на основании конфигурации удлиненной части гибкого инструмента для генерации электроанатомической объемной карты трехмерной области интерлюминальной структуры в ходе процедуры, и
абляционное устройство (117) с возможностью формирования изображения, смонтированное на дистальном конце гибкого инструмента или вблизи него.
2. Система по п. 1, в которой устройство оптического распознавания формы включает в себя оптическое волокно (152), имеющее, по меньшей мере, одну из оптоволоконных брэгговских решеток (FBG) (154) и установки (154) опроса релеевского рассеяния для обнаружения деформации в волокне.
3. Система по п. 1, в которой устройство оптического распознавания формы включает в себя область более высокой чувствительности за счет включения области с увеличенным количеством оптических волокон (152), имеющих оптические датчики (154) деформации.
4. Система по п. 1, в которой устройство оптического распознавания формы включает в себя одну из формы спирали, формы кольца и формы петли.
5. Система по п. 1, в которой эталон включает в себя одно из позиции на гибком инструменте и анатомического эталона.
6. Система по п. 1, в которой гибкий инструмент (102) включает в себя один из катетера и эндоскопа.
7. Система для картографирования интерлюминальных структур, содержащая:
удлиненный гибкий инструмент (102),
устройство (152, 154) оптического распознавания формы, расположенное в гибком инструменте и выполненное с возможностью определения формы удлиненной части гибкого инструмента по протяженной длине от дистального наконечника гибкого инструмента относительно эталона, причем устройство распознавания формы выполнено с возможностью сбора анатомической информации, касающейся интерлюминальной структуры на основании конфигурации удлиненной части гибкого инструмента в ходе процедуры,
абляционное устройство (117) с возможностью формирования изображения, смонтированное на дистальном конце гибкого инструмента или вблизи него, и
модуль (119, 156) распознавания формы, выполненный с возможностью приема информации, собранной устройством распознавания формы, и генерации электроанатомической объемной карты трехмерной области интерлюминальной структуры.
8. Система по п. 7, в которой устройство оптического распознавания формы включает в себя оптическое волокно (152), имеющее, по меньшей мере, одну из оптоволоконных брэгговских решеток (FBG) (154) и установки (154) опроса релеевского рассеяния для обнаружения деформации в волокне.
9. Система по п. 7, в которой устройство оптического распознавания формы включает в себя область более высокой чувствительности за счет включения области с увеличенным количеством оптических волокон (152), имеющих оптические датчики (154) деформации.
10. Система по п. 7, в которой устройство оптического распознавания формы включает в себя одну из формы спирали, формы кольца и формы петли.
11. Система по п. 7, в которой эталон включает в себя одно из позиции на гибком инструменте и анатомического эталона.
12. Система по п. 7, в которой гибкий инструмент (102) включает в себя один из катетера и эндоскопа.
13. Система по п. 7, дополнительно содержащая модуль (123) анализа, выполненный с возможностью совмещения изображения, полученного во время процедуры или перед процедурой, с картой, сгенерированной с использованием устройства распознавания формы.
| US 2010030063 A1, 04.02.2010 | |||
| US 6004269 A, 21.12.1999 | |||
| US 2002183592 A1, 05.12.2002 | |||
| US 2009123111 A1, 14.05.2009 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ НА ОСНОВЕ КВАЗИРАСПРЕДЕЛЕННЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ НА БРЭГГОВСКИХ РЕШЕТКАХ | 2008 |
|
RU2377497C1 |

