ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это раскрытие относится к приборам для оптического восприятия геометрической формы и более конкретно к просвету для использования в оптических волокнах для восприятия геометрической формы, которые защищают и делают возможным вращение оптических волокон.
УРОВЕНЬ ТЕХНИКИ
При оптическом восприятии геометрической формы (OSS) используют свет, идущий вдоль многожильного оптического волокна для определения местоположения и навигации устройства во время хирургического вмешательства. При восприятии геометрической формы на основании волоконной оптики используют собственное обратное рассеяние в стандартном оптическом волокне. Задействованный принцип использует измерение распределенного напряжения в оптическом волокне с использованием характеристического рэлеевского обратного рассеяния или решеток с управляемыми паттернами.
Встраивание волокна для оптического восприятия геометрической формы в медицинское устройство позволяет предоставлять информацию определения местоположения для использования во время навигации внутри организма. Многие интервенционные устройства имеют небольшую площадь поперечного сечения, что ограничивает количество пространства, которое доступно для встраивания оптического волокна. Кроме того, то, как волокно встраивают в устройство, может влиять на эффективность как OSS, так и устройства.
В публикации WO № 2014/049519; публикации WO № 2008/131303; публикации США № 2013/204124; публикации WO № 2011/059889; и японской публикации № 2009/504313 раскрыты системы, которые имеют отношение к оптическим датчикам геометрической формы.
КРАТКОЕ ИЗЛОЖЕНИЕ
В соответствии с данными принципами, прибор с возможностью восприятия геометрической формы содержит гибкое продольное тело, содержащее внешнюю поверхность, в которой инкапсулированы внутренние признаки. Внутренние признаки включают просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, который формирует полый просвет, идущий продольно по телу. Механический элемент выполнен с возможностью вмещать просвет оптического волокна в себе, чтобы делать возможным вращение и поступательное движение оптического волокна и защищать оптическое волокно.
Система восприятия геометрической формы содержит медицинский прибор с возможностью восприятия геометрической формы, который имеет гибкое продольное тело, которое содержит внешнюю поверхность, в которой инкапсулированы внутренние признаки. Внутренние признаки содержат просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, который формирует полость, идущую продольно по телу. Механический элемент выполнен с возможностью вмещать просвет оптического волокна в себе для того, чтобы делать возможным вращение и поступательное движение оптического волокна и защищать оптическое волокно. Консоль выполнена с возможностью принимать оптические сигналы от одного или нескольких оптических волокон и интерпретировать оптические сигналы для того, чтобы определять геометрическую форму прибора.
Способ восприятия геометрической формы в приборе с возможностью восприятия геометрической формы включает предоставление гибкого продольного тела, которое содержит внешнюю поверхность, в которой инкапсулированы внутренние признаки, внутренние признаки содержат просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, который формирует полость, идущую продольно по телу, механический элемент выполнен с возможностью принимать просвет оптического волокна в себе для того, чтобы делать возможным вращение и поступательное движение оптического волокна и защищать оптическое волокно; прием оптических сигналов от одного или нескольких оптических волокон; и интерпретацию оптических сигналов для того, чтобы определять геометрическую форму прибора.
Эти и другие цели, признаки и преимущества по настоящему раскрытию станут видны из следующего подробного описания их иллюстративных вариантов осуществления, которое следует читать в применении к сопроводительным рисункам.
КРАТКОЕ ОПИСАНИЕ ФИГУР
В этом раскрытии подробно представлено следующее описание предпочтительных вариантов осуществления со ссылкой на следующие фиг., на которых:
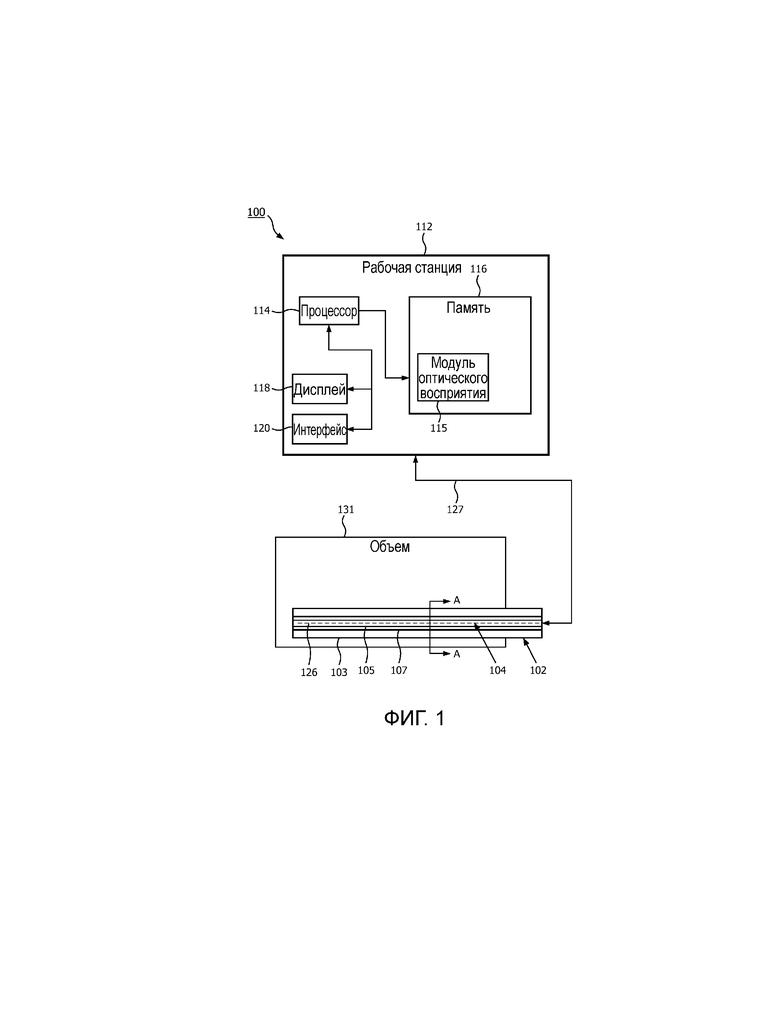
на фиг.1 представлена блочная/потоковая диаграмма, показывающая систему восприятия геометрической формы, в которой используют механический элемент для размещения просвета или канала волокна в нем в соответствии с одним из вариантов осуществления;
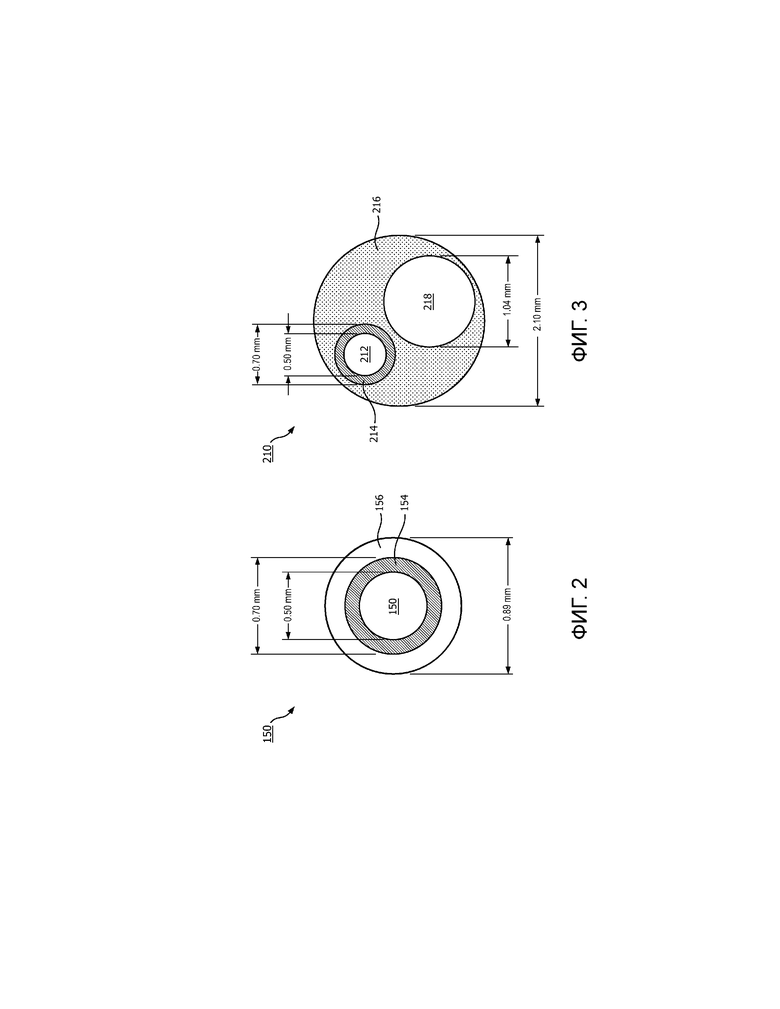
на фиг.2 представлен вид в поперечном разрезе проволочного направителя с возможностью восприятия геометрической формы, который имеет просвет волокна в несущем элементе в соответствии с одном из вариантов осуществления;
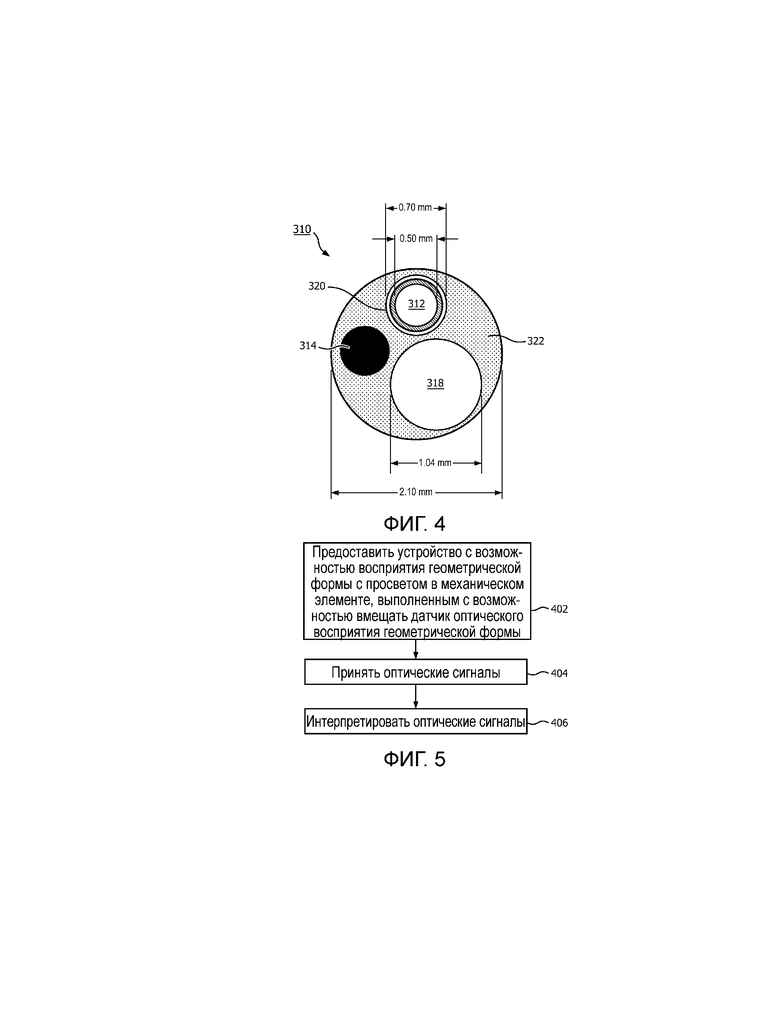
на фиг.3 представлен вид в поперечном разрезе катетера с возможностью восприятия геометрической формы, который имеет просвет волокна в полом несущем элементе в соответствии с другим вариантом осуществления;
на фиг.4 представлен вид в поперечном разрезе катетера с возможностью восприятия геометрической формы, который имеет просвет волокна в полом вытяжном проволочном элементе в соответствии с другим вариантом осуществления; и
на фиг.5 представлена блочная/потоковая диаграмма, показывающая способ восприятия геометрической формы в приборе с возможностью восприятия геометрической формы в соответствии с иллюстративным вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с данными принципами, оптическое волокно, имеющее просвет, выполнено с возможностью повышать эффективность восприятия геометрической формы посредством амортизации вибраций от внешней среды, обеспечивая гладкий и непрерывный просвет без зажимов, и делать возможным свободное скольжение волокна внутри просвета. Эффективность восприятия геометрической формы также можно усовершенствовать посредством устранения связи между крутящим моментом устройства и перекручиванием волокна.
В соответствии с данными принципами, многоцелевую конструкцию просвета используют для интервенционных устройств, которые решают по меньшей мере три проблемы в интеграции волокон. Они включают ограниченную площадь поперечного сечения, доступную в устройстве, защиту и изоляцию волокна от внешней среды и устранение связи между внешним крутящим моментом и перекручиванием волокна.
Ограниченная площадь поперечного сечения доступна внутри многих интервенционных устройств. Значимый вопрос поставлен для того, чтобы создавать оптимальный просвет для волокна с учетом ограниченного пространства, доступного в площади поперечного сечения интервенционных устройств. Например, размеры внешнего диаметра волокон составляют сотни микрометров. Во многих случаях интервенционные устройства содержат канал проволочного направителя, один или несколько несущих стержней, структурную оплетку и вытяжные проволоки (в случае устройств с приводом) на небольшой площади поперечного сечения (например, приблизительно 2,1 мм в случае катетера № 6 по французской шкале). Настоящие варианты осуществления преодолевают это ограничение пространства посредством выполнения существующих признаков медицинских устройств для того, чтобы создавать просвет для волокна для оптического восприятия геометрической формы. В некоторых случаях, оптическая эффективность восприятия геометрической формы возрастает с увеличением диаметра просвета.
Защита и изоляция от внешней среды необходима при OSS, в котором используют вычисление напряжения вдоль многожильного оптического волокна для того, чтобы реконструировать геометрическую форму вдоль волокна. По существу, стабильность геометрической формы и точность реконструкции восприимчивы к изменениям натяжения, перекручиванию, вибрации и зажимов. Встраивание этой технологии в интервенционные устройства, используемые в динамической среде, такой как при сосудистой навигации, может вызывать значительное снижение эффективности OSS из-за по меньшей мере следующих эффектов: 1) продольное прилипание-проскальзывание (натяжение) из-за трения между волокном для восприятия геометрической формы и стенкой просвета при изменении длины пути, вызванном искривлением; и 2) вращательное прилипание-проскальзывание из-за трения между волокном и стенкой просвета во время закручивания устройства; 3) зажатие волокна из-за овализации просвета из-за сгибания устройства, чтобы приспосабливаться к анатомической структуре; 4) вибрация из-за царапания стенок кончиком устройства, обращения клинициста с прибором, потока крови вокруг устройства, сократительных движений сердца и т.д.
Просвет, который содержит оптическое волокно внутри устройства, нужно осторожно проектировать для того, чтобы снижать отрицательные эффекты вибрации, зажимания, перекручивания и трения, оказываемые на волокно. Оптимальный просвет для волокна для оптического восприятия геометрической формы предпочтительно имеет большой диаметр просвета; структурированное сечение просвета для снижения овализации просвета во время сгибания, гашение эффектов вибрации и непрерывный просвет без переходов или точек зажатия.
В отношении устранения связи с перекручиванием, точность положения оптического восприятия геометрической формы падает с увеличением перекручивания вдоль длины датчика. Поскольку кручение медицинских приборов является обычным во многих процедурах, при конструировании устройств существенное значение имеет устранение или уменьшение связи между кручением устройства и перекручиванием датчика. При осторожном выборе положения и свойств просвета, возможно устранять связь между кручением прибора и перекручиванием волокна.
Следует понимать, что настоящее изобретение описано в терминах медицинских приборов; однако положения настоящего изобретения значительно шире и применимы к любым оптоволоконным приборам. В некоторых вариантах осуществления данные принципы используют при отслеживании или анализе сложных биологических или механических систем. В частности, данные принципы применимы к процедурам внутреннего отслеживания в биологических системах, процедурам во всех участках организма, таких как легкие, желудочно-кишечный тракт, выделительные органы, кровеносные сосуды и т.д. Элементы, изображенные на фиг., можно реализовать в различных комбинациях аппаратного обеспечения и программного обеспечения и можно предоставлять функции, которые можно комбинировать в одном элементе или множестве элементов.
Функции различных элементов, представленных на фиг., можно предоставлять через использование специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного исполнять программное обеспечение в связи с подходящим программным обеспечением. Когда предоставляют с помощью процессора, функции можно предоставлять с помощью одного специализированного процессора, с помощью одного коллективно используемого процессора или с помощью множества отдельных процессоров, некоторые из которых могут быть коллективно используемыми. Кроме того, явное использование термина «процессор» или «контроллер» не следует толковать исключительно в качестве указания на аппаратное обеспечение, способное исполнять программное обеспечение, и оно может неявно включать, без ограничения, аппаратное обеспечение цифрового сигнального процессора («DSP»), постоянное запоминающее устройство («ROM») для хранения программного обеспечения, оперативное запоминающее устройство («RAM»), энергонезависимый накопитель и т.д.
Кроме того, все утверждения в настоящем документе, где перечислены принципы, аспекты и варианты осуществления изобретения, а также их конкретные примеры, предназначены для того, чтобы охватывать как их структурные, так и их функциональные эквиваленты. Дополнительно подразумевают, что такие эквиваленты включают как в настоящее время известные эквиваленты, так и эквиваленты, которые будут разработаны (т.е., какие-либо разработанные элементы, которые выполняют ту же функцию, независимо от структуры). Таким образом, например, специалисты в данной области примут во внимание, что блочные диаграммы, приведенные presented в настоящем документе, представляют концептуальное изображение иллюстративных компонентов системы и/или схемы, осуществляющих принципы изобретения. Аналогичным образом, следует принимать во внимание, что любые блок-схемы, потоковые диаграммы и т.п., представляют различные процессы, которые можно по существу представлять в машиночитаемых запоминающих средах и так исполнять с помощью компьютера или процессора, независимо от того, показан ли такой компьютер или процессор явно.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступ к которому можно осуществлять на используемой компьютером или машиночитаемой запоминающей среде, предусматривающей программный код для использования посредством или применительно к компьютеру или какой-либо системе исполнения инструкций. Для целей этого описания используемая компьютером или машиночитаемая запоминающая среда может представлять собой какой-либо аппарат, который может содержать, хранить, передавать, распространять или транспортировать программу для использования посредством или применительно к системе исполнения инструкций, аппарату или устройству. Среда может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (или аппарат или устройство) или среду распространения. Примеры машиночитаемой среды включают полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск и оптический диск. Существующие примеры оптических дисков включают постоянное запоминающее устройство на компакт-дисках (CD-ROM), читаемый/записываемый компакт-диск (CD-R/W), Blu-Ray™ и DVD.
Далее обратимся к фиг., на которых схожие номера позиций представляют одинаковые или схожие элементы и изначально на фиг. 1 иллюстративно представлена система 100 для использования устройств с возможностью восприятия геометрической формы в соответствии с одним из вариантов осуществления. Система 100 может включать рабочую станцию или консоль 112, с которой управляют процедурой и/или наблюдают за ней.
Рабочая станция 112 предпочтительно содержит один или несколько процессоров 114 и память 116 для хранения программ и приложений. Память 116 может хранить модуль 115 оптического восприятия, выполненный с возможностью интерпретировать сигналы оптической обратной связи от устройства или системы 104 восприятия геометрической формы. Модуль 115 оптического восприятия выполнен с возможностью использовать/интерпретировать обратную связь с оптическими сигналами (и какую-либо другую обратную связь, например, электромагнитное (EM) отслеживание) для того, чтобы реконструировать деформации, отклонения и другие изменения, связанные с медицинским устройством или оптическим устройством 102 с возможностью восприятия геометрической формы и/или окружающей его областью. Медицинское устройство 102 может включать катетер, проволочный направитель, зонд, эндоскоп, робот, электрод, фильтрующее устройство, баллонное устройство или другой медицинский компонент и т.д.
Данные принципы изменяют конфигурации существующих структур в медицинском устройстве 102 для встраивания волокна для оптического восприятия геометрической формы. В частности, размещение оптического датчика внутри несущих стержней или вытяжных проволок внутри устройства не только оптимизирует использование доступного поперечного сечения, но также может обеспечивать подходящий просвет для волокна, который будет амортизировать вибрации, имеет структурную опору для того, чтобы предотвращать овализацию и зажимание волокна и может обеспечивать больше пространства для волокна (тем самым увеличивая диаметр для просвета, содержащего оптический датчик). В некоторых случаях волокно можно вращательно изолировать от внешнего кручения через многоцелевую конструкцию просвета.
Прибор 104 с возможностью восприятия геометрической формы содержит гибкое продольное тело 103, содержащее внешнюю поверхность, в которой инкапсулированы внутренние признаки. Внутренние признаки включают просвет 105 оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент 107, образующий полость, идущую продольно по телу. Механический элемент 107 выполнен с возможностью вмещать просвет оптического волокна в себе, чтобы делать возможным вращение оптического волокна и защищать оптическое волокно.
Система 104 восприятия геометрической формы в устройстве 102 содержит одно или несколько оптических волокон 126, которые сопряжены с устройством 102 по заданному паттерну или паттернам. Оптические волокна 126 соединены с рабочей станцией 112 через кабель 127. Кабель 127 может содержать оптоволокно, электрические соединения, другие приборы и т.д., если необходимо.
Система 104 восприятия геометрической формы с оптоволокном может быть основана на датчиках с оптоволоконными брэгговскими решетками. Оптоволоконная брэгговская решетка (FBG) представляет собой короткий сегмент оптического волокна, который отражает свет с конкретными длинами волн и пропускает другие. Этого достигают посредством добавления периодического изменения показателя преломления в сердцевине волокна, что создает диэлектрическое зеркало для конкретных длин волн. Следовательно, волоконную брэгговскую решетку можно использовать в качестве встроенного оптического фильтра для блокирования определенных длин волн или в качестве отражателя для конкретных длин волн.
В основе работы волоконной брэгговской решетки лежит фундаментальный принцип френелевского отражения на каждой из поверхностей раздела, где меняется показатель преломления. Для некоторых длин волн отраженный свет различных периодов совпадает по фазе с тем, чтобы усиливающая интерференция существовала для отражения и, следовательно, ослабляющая интерференция для пропускания. Брэгговская длина волны чувствительна к напряжению, а также к температуре. Это обозначает, что брэгговские решетки можно использовать в качестве воспринимающих элементов в оптоволоконных датчиках. В FBG датчике измеряемая величина (например, напряжение) вызывает сдвиг брэгговской длины волны.
Одно преимущество этого способа состоит в том, что различные чувствительные элементы можно распределять по длине волокна. Встраивание трех или больше сердцевин с различными датчиками (средствами измерения) вдоль длины волокна, которые включены в структуру, позволяет точно определять трехмерную форму такой структуры, типично с точностью выше 1 мм. Вдоль длины волокна в различных положения можно располагать множество FBG датчиков (например, 3 или больше воспринимающих сердцевин волокна). По измерению напряжения на каждой FBG, в этом положении можно делать заключение о кривизне структуры. По множеству измеряемых положений определяют общую трехмерную форму.
В качестве альтернативы оптоволоконным брэгговским решеткам можно использовать собственное обратное рассеяние в стандартном оптическом волокне. Один такой подход состоит в использовании рэлеевского рассеяния в стандартных одномодовых коммуникационных волокнах. Рэлеевское рассеяние возникает в результате случайных флуктуаций показателя преломления в сердцевине волокна. Эти случайные флуктуации можно моделировать в качестве брэгговской решетки со случайной вариацией амплитуды и фазы вдоль длины решетки. Используя этот эффект в трех или больше сердцевинах, идущих внутри одного отрезка волокна с несколькими сердцевинами, можно отслеживать трехмерную геометрическую форму и динамику поверхности, представляющей интерес.
В одном из вариантов осуществления рабочая станция 112 принимает обратную связь от устройства 104 восприятия геометрической формы и внутри объема 131 (например, пациента) предоставляют данные положения в отношении местоположения, положения/вращения (геометрической формы) воспринимающего устройства 104. Изображение устройства 104 восприятия геометрической формы внутри пространства или объема 131 можно отображать на устройстве 118 отображения. Рабочая станция 112 содержит дисплей 118 для просмотра внутренних изображений субъекта (пациента) или объема 131 и может содержать изображение в виде наложения или другого воспроизведения воспринимающего устройства 104. Дисплей 118 также может позволять пользователю взаимодействовать с рабочей станцией 112 и ее компонентами и функциями или каким-либо другим элементом системы 100. Этому дополнительно содействует интерфейс 120, который может содержать клавиатуру, мышь, джойстик, тактильное устройство или какое-либо другое периферийное устройство или устройство управления для того, чтобы допускать пользовательскую обратную связь от рабочей станции 112 и взаимодействие с ней.
На фиг.2, 3 и 4 представлен вид в поперечном разрезе различных приборов 104, выполненном, например, по линии сечения A-A. На фиг.2, 3 и 4 представлены некоторые иллюстративные размеры, предоставленные для сравнения. Приборы и устройства, описанные в настоящем документе не следует толковать в качестве ограниченных этими размерами.
Со ссылкой на фиг.2, вид в поперечном разрезе проволочного направителя 150 с каналом 152 оптического волокна и несущим стержнем 154 проволочного направителя иллюстративно представлен в соответствии с одним из вариантов осуществления. Волокно для оптического восприятия геометрической формы может содержаться в канале 152 оптического волокна проволочного направителя 150, который расположен внутри несущего стержня 154 внутри проволочного направителя 150. В таком устройстве задача несущего стержня 154 состоит в том, чтобы передавать крутящий момент, прикладываемый оператором, с проксимального конца на дистальный кончик проволочного направителя 150. Взамен предоставления отдельного просвета для каждого компонента устройства, несущий стержень 154 можно использовать в качестве просвета для оптического волокна. При использовании такой конструкции достигают нескольких преимуществ.
Например, конструкция предусматривает больше пространства как для несущего стержня 154, так и для канала оптического волокна или просвета 152. Также волокно в канале 152 волокна теперь заключено в полый стержень несущего стержня 154, который может содержать, например, NiTi, стальной сплав или схожий материал. Несущий стержень 154 обеспечивает защитное окружение, которое может сопротивляться зажиманию и перекручиванию. При использовании некоторых конструктивных соображений, этой стержень 154 также можно выполнять для амортизации вибрации и можно изготавливать для того, чтобы минимизировать трение об эту внутреннюю поверхность. Такие соображения могут включать добавление покрытия на внутренний диаметр несущего стержня 154. Эти покрытия могут включать Teflon™, PTFE, MDX, Pebax™ или другие вещества для того, чтобы снижать трение. Несущие стержень 154 или механический элемент может содержать по меньшей мере одно из нитей, оплеток, амортизирующих материалов и т.д., выполненных с возможностью обеспечения признаков амортизации вибрации. Несущий стержень 154 или механический элемент может быть вибрационно амортизирован путем наматывания, оплетения, выполнения из материалов с амортизирующими свойствами и т.д.
Другой эффект многоцелевой конструкции состоит в том, что оптическое волокно теперь лежит вдоль центра устройства 150 (нулевая ось), что обозначает, что там имеют место минимальные изменения длины пути вдоль волокна во время сгибания устройства (тем самым снижая количество движения, трения и напряжения, которые испытывает волокно во время сгибания). Кроме того, поскольку волокно лежит внутри элемента кручения устройства и вдоль центральной оси, он вращательно не ограничен для скольжения в просвете несущего стержня 154 и будет изолирован от внешнего кручения, в отличие от случая, когда волокно расположено эксцентрично, где кручение устройства будет обязательно вызывать перекручивание волокна, поскольку оно смещено относительно оси вращения.
Один из вариантов осуществления можно реализовать с использованием только несущего стержня 154 и просвета 152 для оптического волокна. В другом варианте осуществления покрытие 156 (например, покрытие Pebax™) можно использовать поверх несущего стержня 154.
Со ссылкой на фиг.3, другой пример показывает, в сечении, канал оптического волокна или просвет 212 для волокна для оптического восприятия геометрической формы внутри несущего стержня 214 катетера 210. Катетер 210 содержит рабочий канал 218, используемый для прохождения инструментов или приборов через него. Вместо предоставления отдельного просвета для каждого компонента устройства, несущий стержень 214 также можно использовать в качестве просвета 212 для оптического волокна. Преимущества этой конструкции включают следующее. Конструкция предусматривает больше пространства как для несущего стержня 214, так и для канала 212 оптического волокна. Кроме того, волокно теперь заключено в полый стержень (несущий стержень 214), который может включать, например, NiTi, стальной сплав или схожие материалы. Полый несущий стержень 214 обеспечивает оптимальное окружение, которое может сопротивляться зажиманию и перекручиванию. Несущий стержень 214 также можно выполнять для того, чтобы амортизировать вибрации, и можно изготавливать для того, чтобы минимизировать трение об его внутреннюю поверхность (например, посредством добавления покрытия или покрытий на внутренний диаметр несущего стержня 214).
При использовании некоторых конструктивных соображений, несущий стержень 214 также можно выполнять для того, чтобы амортизировать вибрации, и можно изготавливать для того, чтобы минимизировать трение об его внутреннюю поверхность. Такие соображения могут включать добавление покрытий на внутренний диаметр несущего стержня 214. Эти покрытия могут включать Teflon™, PTFE, MDX, Pebax™ или другие вещества для того, чтобы снижать трение. Несущий стержень 214 или механический элемент может включать по меньшей мере одно из нитей, оплеток, амортизирующих материалов и т.д., выполненных с возможностью обеспечения признаков амортизации вибрации. Несущий стержень 214 или механический элемент можно вибрационно амортизировать путем наматывания, оплетения, выполнения из материалов с амортизирующими свойствами и т.д.
Дополнительный эффект многоцелевой конструкции на фиг.3 состоит в том, что оптическое волокно теперь лежит главным образом вдоль центральной оси кручения устройства с тем, чтобы теперь было возможно устранять связь между кручением устройства и перекручиванием оптического волокна. Это релевантно, поскольку накопление перекручивания в волокне для восприятия геометрической формы может вызывать снижение эффективности. Покрывающий или наполняющий материал 216 (например, Pebax™) можно использовать поверх несущего стержня 214 и для того, чтобы формировать рабочий канал 218.
Со ссылкой на фиг.4, пример просвета или канала 312 волокна для волокна для оптического восприятия геометрической формы содержится в вытяжной проволоке 320 катетера 310. Вместо предоставления отдельного канала для каждого компонента устройства 310, вытяжную проволоку 320 также можно использовать в качестве просвета 312 для оптического волокна. Преимущества этой конструкции включают предоставление большего пространства как для вытяжной проволоки 320, так и для канала 312 оптического волокна, которое затем будет доступно для каждого признака, используемого отдельно. Внутри вытяжной проволоки 320 волокно сейчас заключено в полый металлической (или из другого материала) просвет, который обеспечивает оптимальное окружение, которое может сопротивляться зажиманию и перекручиванию. Вытяжную проволоку 320 также можно выполнять для того, чтобы амортизировать вибрацию, и можно изготавливать для того, чтобы минимизировать трение об ее внутреннюю поверхность.
При использовании некоторых конструктивных соображений, вытяжную проволоку 320 также можно выполнять для того, чтобы амортизировать вибрацию, и можно изготавливать для того, чтобы минимизировать трение об ее внутреннюю поверхность. Такие соображения могут включать добавление покрытий на внутренний диаметр вытяжной проволоки 320. Эти покрытия могут включать Teflon™, PTFE, MDX, Pebax™ или другие вещества для того, чтобы снижать трение. Вытяжная проволока 320 или механический элемент может содержать по меньшей мере одно из нитей, оплеток, амортизирующих материалов и т.д., выполненных для того, чтобы предоставлять признаки амортизации вибрации. Вытяжную проволоку 320 или механический элемент можно вибрационно амортизировать путем наматывания, оплетения, выполнения из материалов с амортизирующими свойствами и т.д.
В другом варианте осуществления катетер 310 может использовать одну или несколько полых вытяжных проволок для того, чтобы приводить в действие катетер 310 больше чем в одной степени свободы. Также могут содержаться несущий стержень 314 и рабочий канал 318. Покрывающий или наполняющий материал 322 (например, Pebax™) можно использовать поверх вытяжной проволоки 320 и для того, чтобы формировать рабочий канал 318.
В соответствии с другими вариантами осуществления, катетерный проводящий элемент, такой как проволока, провод, сердечник электрофизиологического (EP) абляционного катетера и т.д., можно использовать в качестве полого стержня, схожего с вышеприведенными вариантами осуществления, в которых оптическое волокно содержится внутри проводящего элемента катетера. Следует понимать, что настоящие варианты осуществления не ограничены одним воспринимающим волокном. Множество воспринимающих волокон может быть включено в множество вытяжных проволок или каналов внутри прибора, или множество волокон может быть включено в одну вытяжную проволоку или канал внутри прибора. Множество воспринимающих волокон можно использовать для восприятия геометрической формы, напряжения, температуры, потока и т.д.
Данные принципы применимы к любой интеграции датчиков оптического восприятия геометрической формы в медицинские устройства, в том числе ручные катетеры, катетеры с приводом (как ручные, так и роботизированные), проволочные направители, тонкие зонды, эндоскопы и бронхоскопы, ультразвуковые зонды и т.д. или в какие-либо другие направляемые устройства (медицинские или не медицинские).
Со ссылкой на фиг.5, иллюстративно представлен способ восприятия геометрической формы в приборе с возможностью восприятия геометрической формы. В блоке 402 предусмотрен прибор с возможностью восприятия геометрической формы. Прибор с возможностью восприятия геометрической формы содержит гибкое продольное тело, которое имеет внешнюю поверхность, которая окружает внутренние признаки, внутренние признаки включают просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, который формирует полость, идущую продольно по телу, механический элемент выполнен с возможностью вмещать просвет оптического волокна в себе для того, чтобы делать возможным вращение оптического волокна и защищать оптическое волокно. В блоке 404 оптические сигналы принимают от одного или нескольких оптических волокон. В блоке 406 оптические сигналы интерпретируют для того, чтобы определять геометрическую форму прибора.
При интерпретации приложенной формулы изобретения, следует понимать, что:
a) слово «содержит» не исключает присутствие других элементов или действий, кроме перечисленных в данном пункте;
b) элемент в единственном числе не исключает присутствия множества таких элементов;
c) любые ссылочные позиции в пунктах формулы изобретения не ограничивают их объем;
d) некоторые «средства» можно представлять с помощью одной и той же структуры или функции, реализованной в элементе или аппаратном обеспечении или программном обеспечении; и
e) не предусмотрено, что необходима конкретная последовательность действий, пока не указано конкретно.
Описав предпочтительные варианты осуществления для многоцелевых конструкций просвета для оптического восприятия геометрической формы (которые предназначены в качестве иллюстративных и не ограничивающих), следует отметить, что в свете вышеприведенных положений средние специалисты в данной области могут выполнять модификации и вариации. Следовательно, нужно понимать, что можно создавать изменения в конкретных раскрытых вариантах осуществления раскрытия, которые входят в объем вариантов осуществления, описанных в настоящем документе, как определено с помощью приложенной формулы изобретения. Таким образом, описав детали и частности, требуемые патентным законодательством, заявляемое и желаемое, защищаемое патентом на изобретение, изложено в приложенной формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНДОСКОП С ПОВОРОТНОЙ ПРИЗМОЙ | 2009 |
|
RU2538626C2 |
| Катетер для абляции биологической ткани | 2019 |
|
RU2816632C2 |
| СПОСОБЫ И АППАРАТ ДЛЯ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ УХА, ГОРЛА, НОСА | 2009 |
|
RU2506056C2 |
| УСТРОЙСТВО И СПОСОБ ДОСТАВКИ ФИЗИОЛОГИЧЕСКОГО ДАТЧИКА | 2009 |
|
RU2478338C2 |
| ДОЗА С КОМПЕНСАЦИЕЙ ПЕРЕМЕЩЕНИЯ, ПОЛУЧЕННАЯ ТКАНЬЮ В ПРОЦЕДУРАХ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2013 |
|
RU2665604C2 |
| ИНТЕРВЕНЦИОННЫЕ ИНСТРУМЕНТЫ С ПОДДЕРЖКОЙ ОПТИЧЕСКОГО ЗОНДИРОВАНИЯ ДЛЯ БЫСТРЫХ РАСПРЕДЕЛЕННЫХ ИЗМЕРЕНИЙ БИОФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2577509C2 |
| ОПЛЕТОЧНОЕ ЗАКУПОРИВАЮЩЕЕ УСТРОЙСТВО, ИМЕЮЩЕЕ ПОВТОРЯЮЩИЕСЯ УЧАСТКИ УВЕЛИЧЕННОГО ОБЪЕМА, РАЗДЕЛЕННЫЕ УЧАСТКАМИ СОЧЛЕНЕНИЯ | 2007 |
|
RU2447908C2 |
| КАТЕТЕР С ОДНООСНЫМИ ДАТЧИКАМИ | 2011 |
|
RU2503408C2 |
| РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКИМ УСТРОЙСТВОМ С НЕЗАВИСИМЫМИ САМОФИКСИРУЮЩИМИСЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ ДЛЯ РЕГУЛИРОВКИ С ПОМОЩЬЮ ВЫТЯЖНОЙ ПРОВОЛОКИ | 2012 |
|
RU2623131C2 |
| УДАЛЕНИЕ ТКАНИ ИЗ ОКОЛОНОСОВОЙ ПАЗУХИ И НОСОВОЙ ПОЛОСТИ | 2010 |
|
RU2572745C2 |
Группа изобретений относится к медицинской технике. Прибор с возможностью восприятия геометрической формы содержит гибкое продольное тело, которое содержит внешнюю поверхность, которая окружает внутренние признаки. Внутренние признаки включают просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, образующий полость, идущую продольно по телу. Механический элемент выполнен с возможностью вмещать просвет оптического волокна в себе для того, чтобы делать возможным вращение и поступательное движение оптического волокна и защищать оптическое волокно. 6 н. и 20 з.п. ф-лы, 5 ил.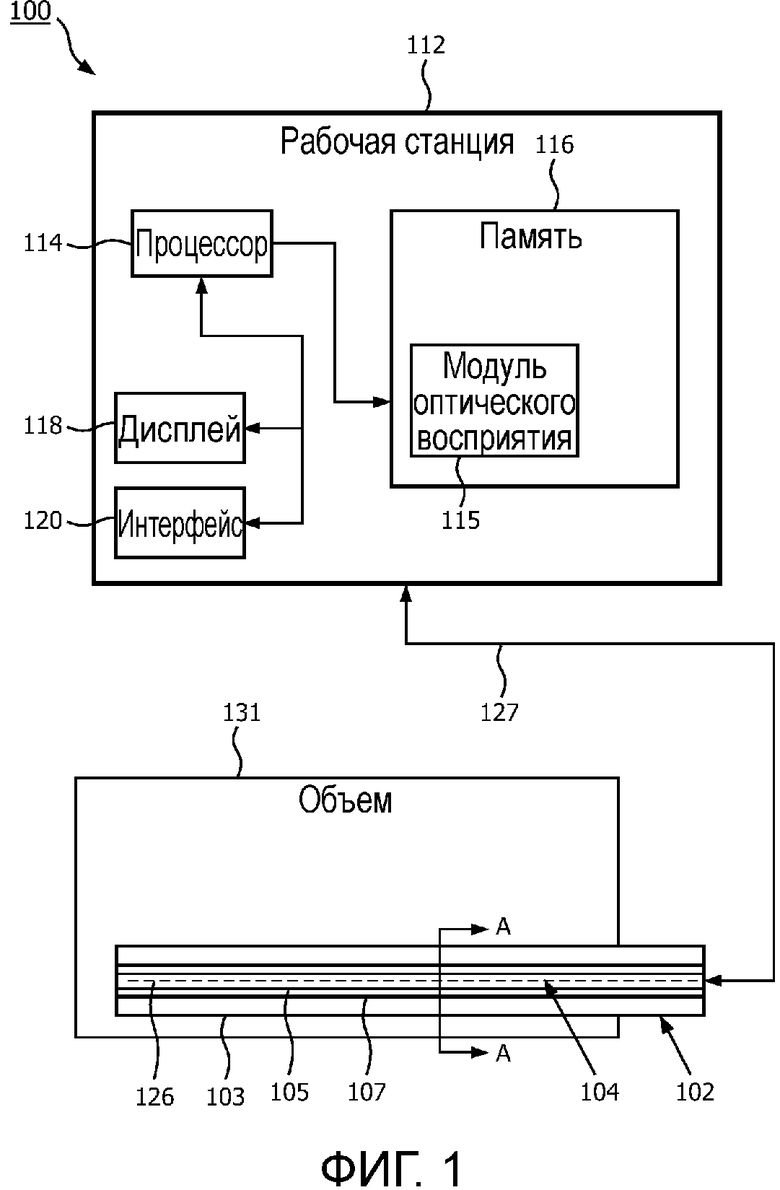
1. Прибор, выполненный с возможностью восприятия геометрической формы, имеющий одно или несколько оптических волокон, который содержит:
гибкое продольное тело (103), которое содержит внешнюю поверхность;
просвет (105) оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы; и
механический элемент (107), образующий полость, идущую продольно по телу, механический элемент выполнен с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию.
2. Прибор по п.1, в котором гибкое продольное тело (103) содержит проволочный направитель и механический элемент (107) содержит несущий элемент проволочного направителя.
3. Прибор по п.2, в котором проволочный направитель, механический элемент и просвет оптического волокна имеют общую продольную ось.
4. Прибор по п.1, в котором гибкое продольное тело (103) содержит катетер и механический элемент (107) содержит несущий элемент катетера.
5. Прибор по п.4, в котором катетер содержит рабочий канал (218) и механический элемент (107) содержит эксцентрический несущий элемент катетера.
6. Прибор по п.1, в котором гибкое продольное тело (103) содержит катетер и механический элемент (107) содержит вытяжную проволоку катетера.
7. Прибор по п.1, в котором механический элемент (107) содержит внутреннее покрытие для того, чтобы снижать трение оптического волокна в просвете и снижать вибрации в оптическом волокне.
8. Прибор по п.1, в котором механический элемент (107) содержит по меньшей мере одно из нитей, оплеток и амортизирующих материалов, выполненных с возможностью обеспечивать признаки амортизации вибрации.
9. Система восприятия геометрической формы, которая содержит:
медицинский прибор (102) с возможностью восприятия геометрической формы, который имеет одно или несколько оптических волокон и содержит гибкое продольное тело, содержащее внешнюю поверхность, которая окружает:
просвет (105) оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы; и
механический элемент (107), образующий полость, идущую продольно по телу, механический элемент выполнен с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию; и
консоль (112), выполненную с возможностью принимать оптические сигналы от одного или нескольких оптических волокон и интерпретировать оптические сигналы для того, чтобы определять геометрическую форму прибора.
10. Система по п.9, в которой гибкое продольное тело (103) содержит проволочный направитель и механический элемент (107) содержит несущий элемент проволочного направителя.
11. Система по п.10, в которой проволочный направитель, механический элемент и просвет оптического волокна имеют общую продольную ось.
12. Система по п.9, в которой гибкое продольное тело (103) содержит катетер и механический элемент (107) содержит вытяжную проволоку катетера.
13. Система по п.12, в которой катетер содержит рабочий канал (218) и механический элемент (107) содержит эксцентрический несущий элемент катетера.
14. Система по п.9, в которой механический элемент (107) содержит внутреннее покрытие для того, чтобы снижать трение оптического волокна в просвете и снижать вибрации в оптическом волокне.
15. Способ восприятия геометрической формы в приборе, выполненном с возможностью восприятия геометрической формы, имеющем одно или несколько оптических волокон, способ содержит этапы, на которых:
предоставляют (402) гибкое продольное тело, содержащее внешнюю поверхность, которая окружает просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и механический элемент, образующий полость, идущую продольно по телу, механический элемент выполнен с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию;
принимают (404) оптические сигналы от одного или нескольких оптических волокон; и
интерпретируют (406) оптические сигналы для того, чтобы определять геометрическую форму прибора.
16. Прибор, выполненный с возможностью восприятия геометрической формы, имеющий одно или несколько оптических волокон, который содержит:
катетер, имеющий внешнюю поверхность, которая охватывает:
просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы; и
вытяжную проволоку, обеспечивающую полость, идущую продольно по катетеру, причем вытяжная проволока выполнена с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию.
17. Прибор, выполненный с возможностью восприятия геометрической формы по п.16, в котором катетер, вытяжная проволока и просвет оптического волокна имеют общую продольную ось.
18. Прибор, выполненный с возможностью восприятия геометрической формы по п.16, в котором катетер содержит внутреннее покрытие для того, чтобы снижать трение оптического волокна в просвете и снижать вибрации в оптическом волокне.
19. Прибор, выполненный с возможностью восприятия геометрической формы по п.16, в котором катетер содержит по меньшей мере одно из нитей, оплеток и амортизирующих материалов, выполненных с возможностью обеспечивать признаки амортизации вибрации.
20. Система восприятия геометрической формы, которая содержит:
медицинское устройство, выполненное с возможностью восприятия геометрической формы, имеющее одно или несколько оптических волокон и содержащее катетер, имеющий внешнюю поверхность, которая охватывает:
просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы;
вытяжную проволоку, обеспечивающую полость, идущую продольно по катетеру, причем вытяжная проволока выполнена с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию; и
консоль, выполненную с возможностью принимать оптические сигналы от одного или нескольких оптических волокон и интерпретировать оптические сигналы, чтобы определять геометрическую форму прибора.
21. Система восприятия геометрической формы по п.20, в которой катетер содержит рабочий канал и вытяжная проволока расположена эксцентрически внутри катетера.
22. Система восприятия геометрической формы по п.20, в которой вытяжная проволока содержит внутреннее покрытие для того, чтобы снижать трение оптического волокна в просвете оптического волокна и снижать вибрации в оптическом волокне.
23. Способ восприятия геометрической формы в приборе, выполненном с возможностью восприятия геометрической формы, имеющем одно или несколько оптических волокон, способ содержит этапы, на которых:
предоставляют катетер, имеющий внешнюю поверхность, которая охватывает просвет оптического волокна, выполненный с возможностью вмещать одно или несколько оптических волокон для оптического восприятия геометрической формы, и вытяжную проволоку, обеспечивающую полость, идущую продольно по катетеру, причем вытяжная проволока выполнена с возможностью содержать в себе просвет оптического волокна для того, чтобы делать возможным вращение и поступательное движение оптического волокна внутри просвета во время работы прибора и защищать оптическое волокно, в том числе сопротивляться его зажиманию и/или перекручиванию;
принимают оптические сигналы из одного или нескольких оптических волокон; и
интерпретируют оптические сигналы, чтобы определять геометрическую форму прибора.
24. Способ по п.23, в котором проволочный катетер, вытяжная проволока и просвет оптического волокна имеют общую продольную ось.
25. Способ по п.23, в котором катетер содержит внутреннее покрытие для того, чтобы снижать трение оптического волокна в просвете оптического волокна и снижать вибрации в оптическом волокне.
26. Способ по п.23, в котором катетер содержит по меньшей мере одно из нитей, оплеток и амортизирующих материалов, выполненных с возможностью обеспечивать признаки амортизации вибрации.
| WO 2008131303 A2, 30.10.2008 | |||
| US 2013204124 A1, 08.08.2013 | |||
| WO 2011059889 A1, 19.05.2011 | |||
| УСТРОЙСТВО И СПОСОБ ДОСТАВКИ ФИЗИОЛОГИЧЕСКОГО ДАТЧИКА | 2009 |
|
RU2478338C2 |

