Заявляемое изобретение относится к авиационному транспорту и предназначено для транспортировки грузов в места, где отсутствуют аэродромы.
Известны многочисленные типы действующих и экспериментальных летательных аппаратов, позволяющих производить полеты в условиях отсутствия аэродромов (Ружицкий Е.И. «Безаэродромная авиация», Оборонгиз, 1959) - [1]. Наиболее эффективным безаэродромным авиационным транспортным средством является вертолет, который может совершать вертикальный взлет и посадку. Но в качестве перевозчика грузов на большие расстояния он значительно уступает самолету - у него меньше скорость полета и большой расход топлива на 1 км пути.
Известен безаэродромный комплекс, состоящий из самолета Райан Х-13 и рампы, способной занимать вертикальное и горизонтальное положения ([1], стр. 150-152, Фиг. 134, 135). Обладая возможностью полета в вертикальном положении, благодаря большой тяговооруженности, самолет Х-13 взлетает и садится, используя рампу, которая при этих маневрах находится в вертикальном положении и играет роль причального устройства. Самолет имеет узел сцепления в виде крюка в носовой части фюзеляжа, которым он швартуется к рампе, цепляясь за натянутый трос прицепного устройства на рампе. Этот комплекс является прототипом заявляемого изобретения.
Недостаток прототипа - низкая эффективность его применения: невозможно использовать рампу для самолетов с тяговооруженностью, не превышающей вес самолета, и летящих с горизонтальной посадочной скоростью, а также большой расход топлива на крейсерских режимах самолетов, имеющих большую тяговооруженность.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении эффективности безаэродромного авиационного комплекса путем его оснащения сцепными устройствами, обеспечивающими применение экономичных грузовых беспилотных самолетов с большими крейсерскими скоростями на трассах, лишенных аэродромов.
Технический результат достигается тем, что в безаэродромном авиационном комплексе, включающем причальное устройство и самолет, оборудованные узлами сцепления для швартовки к причальному устройству самолета для последующего «взлета» или «посадки» его без разбега или пробега по «земле», новым является то, что узел сцепления на самолете расположен на пилоне над центром массы самолета, а причальным устройством является вертолет с внешней подвеской, оборудованной узлом сцепления, обеспечивающим швартовку к вертолету летящего с посадочной скоростью самолета и последующую его «посадку» по вертолетному, а также швартовку к вертолету самолета на «земле» с последующим «взлетом» его по вертолетному.
В безаэродромном авиационном комплексе узел сцепления вертолета установлен на конце каната внешней подвески вертолета и состоит из треугольной петли, образованной эластичным канатом в основании и двумя боковыми стержнями, в одни концы которых заделан канат вместе с эластичными наконечниками, а другие соединены шарнирами с корпусом, являющимся вершиной треугольной петли, и к которому присоединена плоская пружина, обеспечивающая натяжение каната разводом стержней в стороны, а также из штанги, которая шарнирами соединяет конец каната внешней подвески и корпус, удерживая своим весом и весом корпуса плоскость петли перпендикулярно к вертикальной и наклонно к горизонтальной плоскостям, а в узле сцепления самолета установлена телевизионная камера.
Сущность изобретения поясняется на Фиг. 1-Фиг. 3, где:
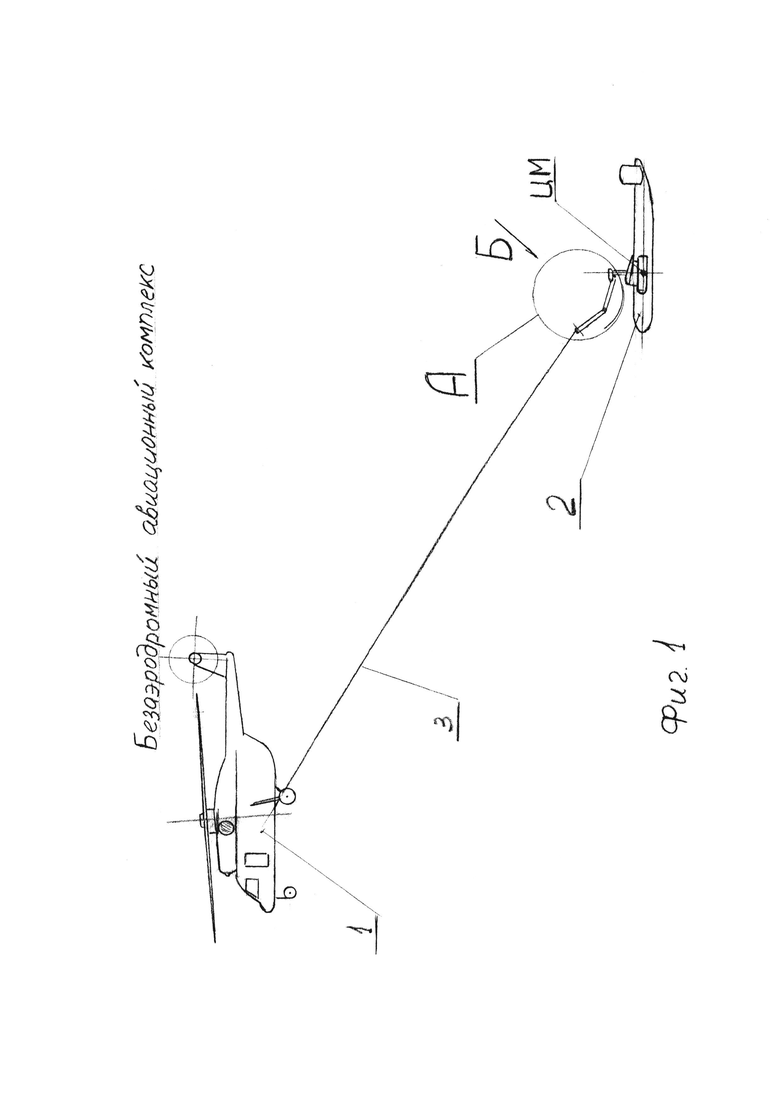
Фиг. 1 - Комплекс в полете: вертолет с внешней подвеской в процессе сцепления с беспилотным самолетом.
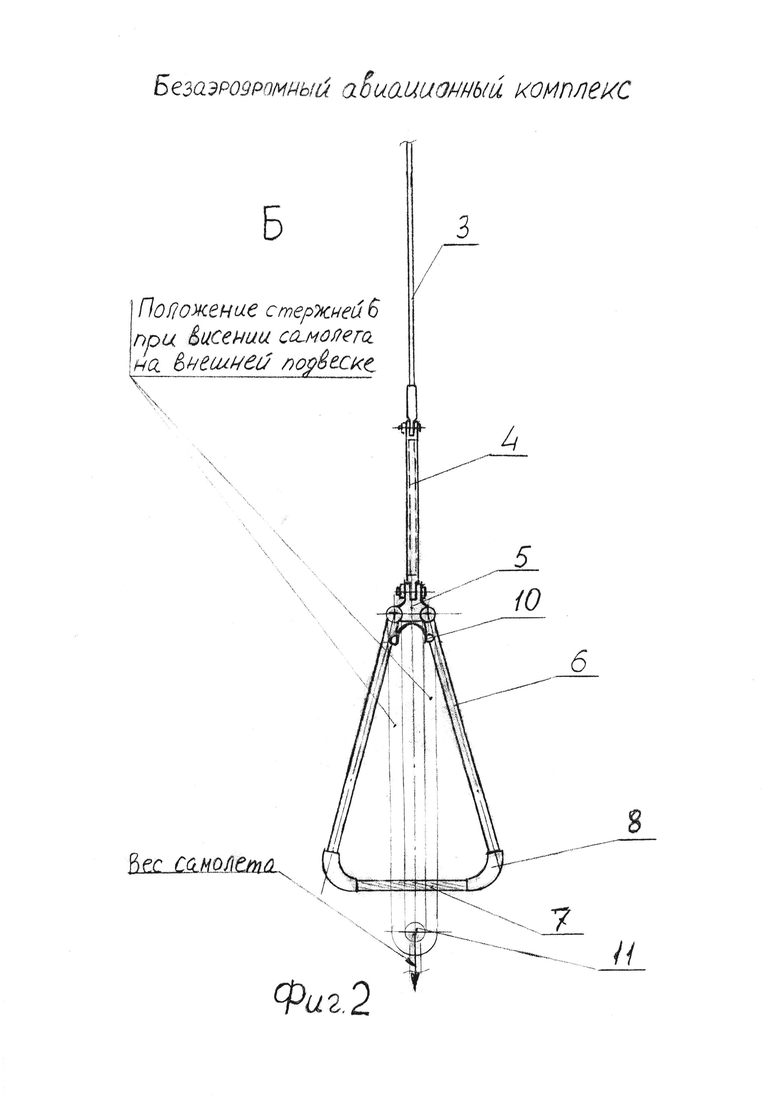
Фиг. 2 - Сцепной узел внешней подвески (Б на Фиг. 1).
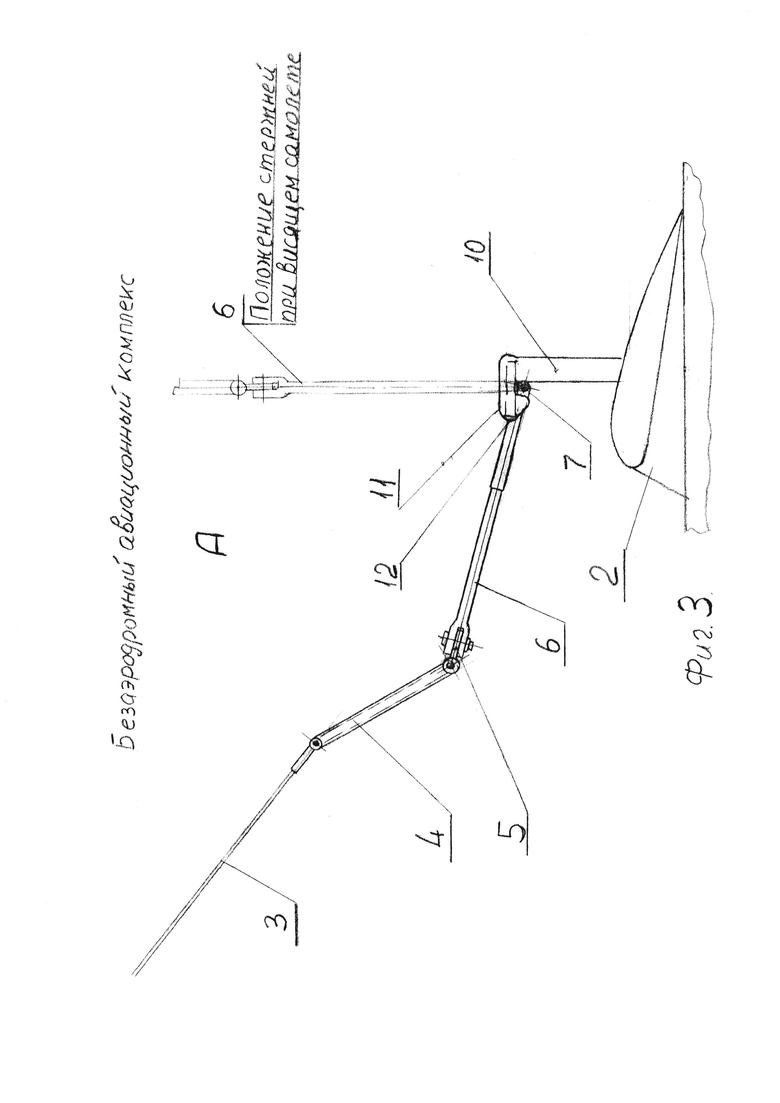
Фиг. 3 - Вид сбоку (А на Фиг. 1) на сцепные устройства вертолета и самолета.
1 - Вертолет с внешней подвеской.
2 - Беспилотный самолет.
3 - Канат внешней подвески.
4 - Штанга сцепного узла внешней подвески.
5 - Корпус сцепного узла внешней подвески.
6 - Стержень сцепного узла внешней подвески.
7 - Канат сцепного узла внешней подвески.
8 - Наконечник сцепного узла внешней подвески.
9 - Пружина пластинчатая сцепного узла внешней подвески.
10 - Пилон беспилотного самолета.
11 - Крюк на пилоне.
12 - Телекамера в крюке.
На фиг. 1 представлен безаэродромный авиационный комплекс в полете, состоящий из вертолета 1 с внешней подвеской 3 и беспилотного самолета 2, которые находятся в процессе зацепления. На фиг. 2 показан узел сцепления внешней подвески, закрепленный на конце каната 3 (вид Б, фиг. 1), состоящий из штанги 4, корпуса 5, стержней 6, в концы которых заделаны концы полиамидного каната 7. Стержни 6 под действием пластинчатой пружины 9 поворачиваются вокруг болтов крепления их проушин к корпусу 5, образуя треугольную петлю с канатом 7 в основании. Для увеличения радиуса изгиба каната 7 при его натяжении пружиной 9 на выходе из стержней 6 на канат и стержни установлены резиновые наконечники 8. На фиг. 3 изображено начало процесса сцепления в полете петли внешней подвески и узла сцепления самолета (А, фиг. 1), состоящего из крюка 11, закрепленного на пилоне 10. В корпусе крюка 11 размещена телекамера 12. В полете под действием сил веса штанги 4 и веса корпуса 5 штанга 4, будучи подвешенной в верхней точке к концу каната 3, всегда находится в вертикальной плоскости и ориентирует плоскость треугольной петли перпендикулярно к этой плоскости, а силы аэродинамического сопротивления стержней 6 и каната 7 создают наклон ее к горизонтальной плоскости. На режиме висения вертолета штанга и плоскость петли находятся в вертикальной плоскости.
Беспилотный самолет 2 может иметь различную аэродинамическую компоновку, но сверху фюзеляжа по оси симметрии должны отсутствовать надстройки, за которые может зацепиться канат 7. Пилон 10 с крюком 11 могут быть убирающимися в полете. Беспилотный самолет оборудован системой автоматического управления (САУ), состоящей из автопилота, компьютера, бортовой телевизионной камеры и приемопередатчика. В компьютер заложены программы полетов, в том числе по сигналам GPS и ГЛОНАСС. Активация или изменение программы полета производится по радиолинии командами оператора согласно широко применяемым в современной технике методикам и аппаратуре управления полетами беспилотных самолетов.
Вертолет 1 любой аэродинамической компоновки может содержать специально оборудованное место для оператора, управляющего с помощью приемо-передатчика беспилотным самолетом (применение в заявленном комплексе самолетов, управляемых пилотом, нецелесообразно, но не исключается.) Наличие на вертолете специального места оператора не является обязательным. Управление беспилотным самолетом может производиться по радиолинии и с наземного пункта управления.
Перед операцией «взлета» беспилотный самолет и канат 3 внешней подвески должны быть расположены впереди с левого борта вертолета со стороны командира вертолета, а на пилон 10 должна быть надета петля подвески с расположением середины каната 7 на передней кромке пилона, а штанги 4 на задней части фюзеляжа. Взлетая с набором высоты, вертолет удерживает канат 3 внешней подвески сзади пилона 10, что обеспечивает скольжение каната 7 по пилону, и заход его в паз крюка 11, при этом петля подвески вытянется в одну линию. Этот момент зацепления просматривается наземным персоналом и оператором, которые дадут вертолету сигнал на дальнейший подъем вертолета уже с висящим на крюке 11 самолетом. Дальнейший набор высоты начинается с увеличением скорости горизонтального полета вертолета вплоть до достижения взлетной скорости самолета. В этот период, убедившись, что самолет ориентируется по воздушному потоку, оператор дает команду САУ беспилотного самолета на запуск двигателей и переход на взлетный режим полета. Самолет разгоняется, его высота полета увеличивается, что уменьшает давление крюка 11 на канат 7, и под действием пружины 9 стержни 6 раздвигаются, канат 7 спрямляется и выходит из паза крюка 11. Это положение определяется оператором, по появлению на мониторе изображения корпуса 5 и штанги 4, что является сигналом для команды САУ самолета на плоский поворот влево до полного удаления его от внешней подвески вертолета и перехода к полету по трассе.
«Посадка» грузового беспилотного самолета начинается с команд САУ самолета снизиться до высоты барражирования вертолета и произвести маневр, обеспечивающий касание середины (или близкое к ней) каната 7 передней кромки пилона 10 ниже крюка 11, что контролируется оператором по изображению корпуса 5 и штанги 4 на мониторе. В этом положении самолет резко снижается, и канат 7, скользя по кромке пилона, заходит в паз крюка 11. Дальнейшее снижение самолета ведет к сближению рычагов 6, и из зоны визирования телевизионной камеры исчезают изображения корпуса 5 и штанги 4, что является сигналом для выключения двигателей самолета. С выключенными двигателями самолет повисает на петле внешней подвески, а вертолет, после режима торможения, плавно опускает его на землю на шасси, и, при необходимости, сам садится рядом, располагая самолет и канат 3 впереди со своего левого борта.
Заявленный комплекс может применяться Газпромом при прокладке труб газопроводов (трубы могут поставляться непосредственно к месту укладки), при операциях снабжения труднодоступных мест, а также при мониторинге подобных регионов. При этом один и тот же вертолет может применяться с разными беспилотными самолетами, являясь для них унифицированным средством взлета и посадки. При использовании в комплексе таких вертолетов, как Ми-10к, Ми-26, взлетный вес грузовых самолетов может достигать 10-20т, а полезная нагрузка порядка 5-Ют, что значительно повышает эффективность этого транспорта. Эффективность комплекса определяется в первую очередь высокими аэродинамическими качествами и простотой конструкции беспилотных самолетов. Взлетная масса самолета определяется максимальным весом груза, поднимаемым вертолетом на внешней подвеске. В комплексе могут применяться обычные серийные вертолеты с обычной серийной внешней подвеской, которая оборудуется специальным сцепным узлом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертолетная внешняя подвеска | 2015 |
|
RU2608824C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| ПЛАВУЧИЙ ВЕРТОЛЕТНЫЙ ВЗЛЕТНО-ПОСАДОЧНЫЙ И ПРИЧАЛЬНЫЙ КОМПЕКС | 2008 |
|
RU2369518C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| ВЕРТОЛЕТНАЯ РОБОТИЗИРОВАННАЯ УНИВЕРСАЛЬНАЯ СИСТЕМА (ВРУС) | 2020 |
|
RU2754643C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС АВИАНЕСУЩЕГО КОРАБЛЯ | 2012 |
|
RU2494005C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ВЕРТОЛЕТОВ ТИПА МИ-8 САМОЛЕТОМ ИЛ-76 И ОСНАСТКА ДЛЯ РАЗМЕЩЕНИЯ И ШВАРТОВКИ ВЕРТОЛЕТОВ МИ-8 ПРИ ТРАНСПОРТИРОВКЕ ИХ САМОЛЕТОМ ИЛ-76 | 2005 |
|
RU2310584C2 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| ГИБРИДНО-ТРАНСПОРТНАЯ СИСТЕМА "БУКСИР" | 2014 |
|
RU2566455C1 |
Изобретение относится к области авиации, в частности к транспортировке грузов в места, где отсутствуют аэродромы. Безаэродромный авиационный комплекс включает причальное устройство и самолет, выполненные с возможностью швартовки друг с другом, оборудованные узлами сцепления для швартовки к причальному устройству самолета для последующего «взлета» или «посадки» его без разбега или пробега по «земле». Узел сцепления на самолете расположен на пилоне над центром массы самолета. Причальным устройством является вертолет с внешней подвеской, оборудованной узлом сцепления, обеспечивающим швартовку к вертолету летящего с посадочной скоростью самолета и последующую его «посадку» по вертолетному, а также швартовку к вертолету самолета на «земле» с последующим «взлетом» его по вертолетному. Узел сцепления вертолета установлен на конце каната внешней подвески вертолета и состоит из плоской треугольной петли с эластичным канатом в основании и двух боковых стержней. Достигается повышение эффективности авиационной транспортной системы. 2 з.п. ф-лы, 3 ил.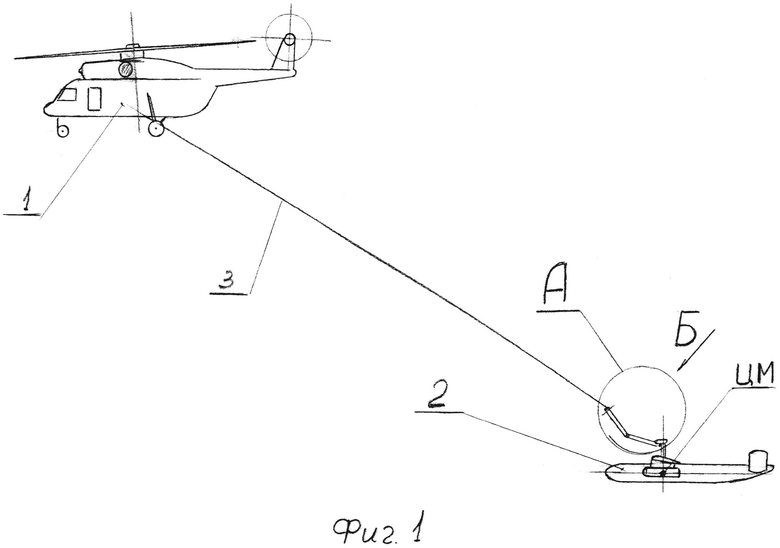
1. Безаэродромный авиационный комплекс, включающий причальное устройство и самолет, выполненные с возможностью швартовки друг с другом, оборудованные узлами сцепления для швартовки к причальному устройству самолета для последующего «взлета» или «посадки» его без разбега или пробега по «земле», отличающийся тем, что узел сцепления на самолете расположен на пилоне над центром массы самолета, а причальным устройством является вертолет с внешней подвеской, оборудованной узлом сцепления, обеспечивающим швартовку к вертолету летящего с посадочной скоростью самолета и последующую его «посадку» по вертолетному, а также швартовку к вертолету самолета на «земле» с последующим «взлетом» его по вертолетному.
2. Безаэродромный авиационный комплекс по п. 1, отличающийся тем, что узел сцепления вертолета установлен на конце каната внешней подвески вертолета и состоит из плоской треугольной петли с эластичным канатом в основании и двух боковых стержней, в одни концы которых заделан канат вместе с эластичными наконечниками, а другие соединены шарнирами с корпусом, являющимся вершиной треугольной петли, и к которому присоединена плоская пружина, обеспечивающая натяжение каната разводом стержней в стороны, а также из штанги, которая шарнирами соединяет конец каната внешней подвески и корпус, удерживая своим весом и весом корпуса плоскость петли перпендикулярно к вертикальной и наклонно к горизонтальной плоскостям.
3. Безаэродромный авиационный комплекс по п. 1, отличающийся тем, что в узле сцепления самолета установлена телевизионная камера.
| US 4757959 A, 19.07.1988 | |||
| US 4267987 A, 19.05.1981 | |||
| СПОСОБ ВОЗДУШНОГО СТАРТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258639C1 |
| US 3891165 A, 24.06.1975. | |||

