Изобретение относится к авиационно-ракетным системам с модульными самолетами-вертолетами, левый и правый из которых с большими асимметричными крыльями (БАС) имеют соответственно на правой и левой их законцовках стыковочные узлы, разъемно соединяющие их консоли с верхним обтекателем совместно ими переносимой управляемой ракеты, смонтированными на их подкрыльных фюзеляжах, содержащих зеркально БАС меньшие асимметричные крылья с их пилонами однолопастных несущих винтов (ОНВ) и комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими их ОНВ и/или в кольцевых обтекателях их турбовентиляторы, создающие реактивную тягу с работающими/авторотирующими ОНВ или зафиксированными их лопастями в конфигурации реактивного автожира или самолета.
Известен авиационный ракетный комплекс перехвата (АРКП), поражающий искусственные спутники Земли (ИСЗ) противника на низких орбитах, созданный по [http://www.aimar.m/weapon/aw/asm135.html] программе ASAT (Anti-Satellite Missile) фирмой Vought (США), имеющий истребитель-носитель типа F-15A со специальным подфюзеляжным пилоном, на котором подвешивалась двухступенчатая противоспутниковая ракета (ПСР) типа ALMV (Air-Launched Miniature Vehicle). В качестве первой ступени применен ракетный твердотопливный двигатель SR75-LP-1 тягой 4500 кгс, в качестве второй- ступень Vought Altair III с твердотопливным двигателем Thiokol FW-4 с тягой 2720 кгс.Авиационная ПСР типа ASM-135А имела длину 5420 мм, диаметр корпуса 510 мм, стартовый вес 1180 кг, скорость полета 24000 км/ч, дальность действия 560 км при высоте пуска 15…18 км и несла целевую нагрузку (ЦН) - малогабаритный перехватчик MHIV (Miniature Homing Intercept Vehicle), имеющий вес 15,4 кг, длину 460 мм и диаметр около 300 мм. Перехватчик MHIV включает несколько десятков небольших двигателей, инфракрасную систему самонаведения, лазерный гироскоп и бортовой компьютер. На его борту нет взрывчатого вещества, поскольку поражение цели ИСЗ противника осуществлялось за счет кинетической энергии при прямом попадании в нее. Наведение ракеты ASAT в расчетную точку пространства после ее отделения от самолета-носителя производится инерциальной системой. Она размещается на второй ступени ракеты, где для обеспечения управления по трем плоскостям установлены небольшие двигатели, работающие на гидразине. К концу работы второй ступени малогабаритный перехватчик с помощью специальной платформы раскручивается до 20 об/с. Это необходимо для нормальной работы инфракрасной системы самонаведения и обеспечения стабилизации перехватчика в полете. К моменту отделения перехватчика от ракеты его инфракрасные датчики, ведущие обзор пространства с помощью восьми оптических систем, захватывали цель. Моменты включения в работу Двигателей для наведения перехватчика на цель рассчитаны так, чтобы сопла ориентировались в пространстве нужным образом. Для определения ориентации самого перехватчика служит кольцевой лазерный гироскоп, являющийся высокоточными часами, которые отсчитывают обороты. Принятые инфракрасными датчиками сигналы от цели, а также информация с лазерного гироскопа поступают в бортовой компьютер. Он устанавливает с точностью до микросекунд, какой двигатель должен включиться для обеспечения движения перехватчика по направлению к цели. Кроме того, бортовой компьютер рассчитывает последовательность включения двигателей, чтобы не нарушалось динамическое равновесие и не началась нутация перехватчика. АРКП аэродромного базирования, размещенные на континентальной части США, могли обеспечить перехват только 25% ИСЗ, находящихся на низких орбитах.
Известен беспилотный самолет проекта "X-plane" компании "Northrop Grumman" (США) [http://test.abovetopsecretxorn/forum/thread398541/pg1], выполненный по схеме летающее крыло асимметрично изменяемой стреловидности (КАИС), имеет два турбореактивных двухконтурных двигателя (ТРДД) в мотогондоле с внутренними бомбоотсеками и трехопорным убирающимся колесным шасси. Для сверхзвукового полета "X-plane" его ТРДД General Electric J85-21 имеют реактивную тягу 4485 кгс, что на высоте полета 15 км обеспечивает скорость 1275/1487 км/ч при тяговооруженности 0,54/0,68. Самолеты с КАИС имеют ряд недостатков, основными из которых являются: смещение аэродинамического фокуса при разнонаправленной стреловидности, что приводит к увеличению балансировочного сопротивления; возрастание массы конструкции из-за наличия поворотных шарниров консолей. Кроме того, при большом угле 45° стреловидности консоль с прямой стреловидностью имеет больший эффективный угол атаки, чем консоль с обратной стреловидностью, что приводит к асимметрии лобового сопротивления и, как следствие, возникновению паразитных разворачивающих моментов по крену, тангажу и рысканию. Более того, для КАИС характерны вдвое больший рост толщины пограничного слоя вдоль размаха и любой несимметричный срыв потока вызывает интенсивные возмущения, а их устранение достигается использованием Х-крыльев из двух асимметричных разновеликих крыльев.
Наиболее близким к предлагаемому изобретению является британский [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] противолодочный авиационный комплекс (ПАК) мод. "Icara" с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ).
Признаки, совпадающие - БЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет самонаводящуюся противолодочную торпеду (ПЛТ) типа Мк.44, имеющую при ее массе 196 кг, длине 2,57 м и диаметре 324 мм, скорость 30 узлов и дальность хода 5 км. БЛА с торпедой Мк.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность до 24 км и скорость полета до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположений цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем в полете передавал их через БСУ на БЛА. По прибытии БЛА в район нахождения цели торпеда Mk.44, полуутопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на парашюте, входила в воду и начинала поиск цели. После чего БЛА продолжает полет с работающей СУ, уводя его от места приводнения самонаводящейся ПЛТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном британском ПАК модели "Icara" увеличения целевой нагрузки и весовой отдачи, повышения скорости и дальности полета, но и вероятности поражения цели - спутника Земли, расположенного на низкой орбите 120…200 км, а также возврата на вертолетную площадку корабля исследовательского комплекса (КИК) для повторного использования.
Отличительными признаками предлагаемого изобретения от указанного выше известного британского ПАК модели "Icara", наиболее близкого к нему, являются наличие того, что корабельная авиационно-ракетная система (КАРС) имеет группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемых попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого КИК, причем МБСВ с МПСВ в их комбинации снабжены как меньшими асимметричными крыльями (МАК) либо МАК с большими асимметричными крыльями (БАК), так и двумя двухвинтовыми несущими системами (ДВНС), используемыми при ВВП и коротком взлете/вертикальной посадке (КВВП), включающими одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, установленные с их перекрытием а=1,5 на пилонах МАК, смонтированных зеркально БАК на каждом подкрыльном фюзеляже (ПКФ) со всеми, например, их ОНВ с профилированными противовесами, выполненных с автоматами перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации и свободного их вращения при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над бортами ПКФ от кормовой его части к носовой и от носовой к кормовой части при равном удалении в плане осей их вращения от центра масс и упомянутой УР, и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с его воздухозаборниками и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, удвоенной двухдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в каждой ДВНС-Х2 и/или на соответствующие ОТВ, создающие, например, в каждой пропульсивно-реактивной системе (ПРС) синхронную тягу при выполнении ВВП и КВВП или горизонтальном полете, но и выполнены с возможностью преобразования полетной конфигурации соединенных МБСВ/МПСВ после установки левого и правого ПКФ на концах соответствующих консолей крыла упомянутой УР так, что левая и правая консоли МАК имеют углы стреловидности χ=-45° и χ=+45° соответственно либо образования их двумя БАК составного асимметричного крыла (САК) с удвоенным его удлинением λ=8,0 и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными и ДВНС-Х2, и ITPC-R2 в реактивный автожир с авторотирующими ОНВ или самолет с зафиксированными их ОНВ с противовесами и их лопастями, размещенными в плане параллельно продольным осям ПКФ и упомянутой УР соответственно вперед и назад по полету, но и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ, соединенных крылом упомянутой УР либо их прямым САК, образующим над их ПКФ X-образные крылья с разновеликими консолями, имеющими МАК с меньшим в 1,74 раза размахом, чем одно БАК, определяемым из соотношения: LMAK=ROHB × a × cos χ=45°, м (где: ROHB - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность МАК), но и обратно, при этом снизу под или сверху над центром масс МБСВ/МПСВ имеются в утонченностях их ПКФ механизмы крепления и расцепления, разъемно соединяющие соответствующие консоли упомянутой УР с ПКФ, образующие единую конструкцию для совместного ими переноса УР, синхронного в полете их отделения от крыла УР для ее запуска и последующего раздельного возврата с автоматической вертикальной их посадкой на палубу упомянутого КИК либо на правой/левой законцовках БАК соответственно левого МБСВ/правого МПСВ имеются их механизмы крепления и расцепления, образующие САК и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН)- упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого КИК.
Кроме того, в упомянутых МБСВ/МПСВ каждый их КГтД содержит между упомянутыми ОТВ и ССТ и соосно с двумя последними Т-образный в плане осевой редуктор, имеющий продольный по его оси входной вал, например, от одной ССТ и выходные продольный и поперечный валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй - на Т-образный в плане главный редуктор, продольный вал которого вращательно связан через муфту сцепления с Т-образным при виде сзади редуктором, передающим выходными его валами, проложенными в консолях МАК, равновеликую мощность на угловые редукторы ОНВ, а в каждом их ПКФ его боковые воздухозаборники, не имеющие пластинчатого отсекателя пограничного слоя и внутренних подвижных регулирующих элементов, выполнены и для экранирования лопаток ОТВ их упомянутых КГтД, и отведения пограничного слоя, и повышения коэффициента восстановления полного давления как без щели для слива пограничного слоя, но и каждый включает рампу, сжимающую поток и формирующую коническое его течение, а на режимах их ВВП и зависания изменение балансировки по тангажу и крену обеспечивается изменением соответствующего циклического шага посредством автомата перекоса каждого ОНВ, а путевое управление- изменением крутящих моментов в парах ОНВ, вращающихся в одном направлении при виде сверху левого ОНВ МБСВ с правым ОНВ МПСВ и правого ОНВ МБСВ с левым ОНВ МПСВ соответственно против часовой и по часовой стрелке, при этом на режимах ВВП и зависания упомянутых МБСВ/МПСВ при удельной нагрузке на мощность комбинированной их СУ, составляющей ρN=1,92 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ССТ в их КГтД, оснащенную последовательно соединенными блоком приведения давления в компрессоре их ССТ, блоком формирования заданного значения частоты вращения и углового положения лопаток их ССТ и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ССТ и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в упомянутой удвоенной ДВНС-Х2, составляющей ρBT=1,85 с учетом потерь от обдува упомянутых ПКФ и крыла УР с МАК либо САК с МАК, включающего режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ОНВ соответственно как от двух пар работающих ССТ, так и от одной в ней из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ОНВ при отказе одной ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности в удвоенной ДВНС-Х2, составляющей ρBT=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/c) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения ПКФ и дисков вращения ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего управляемого его снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их ПКФ с колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПКФ и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, а их компьютер управления полетом выполнен с дополнительным компьютером суммирования данных датчиков, но и с возможностью преобразования данных с каждого датчика в относительное положение, которое определяет на основе глобального положения, причем в упомянутых МБСВ/МПСВ каждое прямоугольное плоское сопло 20 их КГтД для уменьшения инфракрасного (ИК) излучения и управления вектором тяги (УВТ) снабжено центральным телом 26, имеющим на его конце термостойкие верхнее 27 и нижнее 28 трапециевидные при виде сбоку поперечные расщепляемые створки с их раздельными приводами, отклоняющими от его оси и между боковых его стенок 29-30 вверх и вниз совместно двумя на углы ±45°…±55° или углы ±5°…15° для реверса тяги или изменения проходного сечения либо раздельно на углы ±20° синфазно или дифференциально для продольного или поперечного управления соответственно и поперечную полость 31, сообщаемую с атмосферой каналами 32 со створками 33 в боковых стенках 29-30 сопла 20, но и с проточной его частью продольными и щелями 34, и верхними 35/нижними 36 пазами в створках 27/28 соответственно, а каждый их ПКФ имеет от пирамидальной носовой его части скошенные по всей его длине боковые стороны, образующие с боковыми воздухозаборниками при виде спереди пятнили шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, при этом малозаметные МБСВ/МПСВ выполнены соответственно без/с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления МПСВ и возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, смонтированные бок о бок, срабатывающие на режимах выполнения ВВП и зависания автоматически после отстрела пиропатронами лопастей ОНВ при аварийной ситуации, а ПКФ в МБСВ между его КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, а их БСУ оснащена электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления из кабины пилотов и/или их комбинации, причем МБСВ/МПСВ, несущие под пилоном упомянутого их САК противокорабельную ракету (ПКР) Х-47М2 «Кинжал», обеспечивают ее управляемый запуск на сверхзвуковой скорости и высоте 15 км и позволят достичь дальности ее полета до 2160/3570 км, используя технологию ВВП/КВВП соответственно, а каждый их ПКФ имеет на их концах цельно-поворотные кили, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии МБСВ/МПСВ, а каждое их БАК и МАК имеют треугольные в плане законцовки с внешними их сторонами, размещенными параллельно их оси симметрии, первое из них снабжено складывающимися вверх концевыми его частями, обеспечивающими при раздельном размещении МБСВ и МПСВ в ангаре упомянутого КИК с установленными во флюгерное положение лопастями их ОНВ, зафиксированными вдоль бортов их ПКФ, и наравне со сложенными их БАК уменьшают в 4,4…4,6 раза стояночную их площадь от взлетной, при этом МБСВ/МПСВ, несущие под пилонами упомянутого их САК две стратегические крылатые ракеты (СКР) типа Х-555, образующие после их запуска автономные рои СКР с буксируемыми ложными их целями, использующие маловысотный профиль их полета и систему их самообороны- станцию активных электронных помех, повышают, используя технологию ВВП/КВВП, дальность их действия до 6407/9295 км соответственно, а их ПКФ содержат одно- и двухстворчатые соответственно боковые и нижние отсеки, ПУ которых с закрепленными на них УР типа Р-77 и ПКР типа Х-38М смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а под пилоном их САК, неся упомянутую СЦН - топливный бак, позволит, используя его топливо, долететь каждой их паре в авиагруппе до надводной цели, затем, разделяясь и атакуя ее роем, повысить поражающую возможность и дальность полета ПКР с 40 км до 1830 км, а комплекс их вооружения имеет авиационные пушки, встроенные в обтекателе нижней носовой части каждого ПФГ, поражающие дозвуковые ударные БЛА и СКР, причем электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается перед кабиной МПСВ сверху носовой части его ПКФ и с радаром последнего обеспечивает на больших, безопасных расстояниях целеуказание и управление оружейными нагрузками и своими, и МБСВ с наведением на цель УР воздух-воздух и ПКР, СКР воздух-поверхность, но и его использования в составе авиагруппы в качестве головного МПСВ, например, с парой предыдущих и более чем парой из последующих ведомых, при этом каждый сенсорный компьютер предыдущих и последующих из ведомых МБСВ, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного МПСВ и предыдущих МБСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета, и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета МБСВ в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному ударно-стратегическому роению, причем тяжеловооруженные МБСВ/МПСВ, несущие после выполнения вертикального взлета под пилоном упомянутого их САК упомянутую СЦН - одну двухступенчатую противоспутниковую ракету (ПСР), поражающую кинетическим ее перехватчиком искусственный спутник Земли (ИСЗ), действующий на низких орбитах 120…200 км, увеличивают, используя транс-/сверхзвуковую скорость, дальность действия ПСР типа 95М6 «Контакт» с 600 км соответственно до 2875/1970 км от упомянутого КИК, при этом наведение ПСР в расчетную точку пространства производится инерциальной системой управления после автоматического сверхзвукового подъема МБСВ/МПСВ с углом наклона их траектории 65° и получением с КП упомянутого КИК команд на выполнение как отделения ПСР от МБСВ/МПСВ-носителей, так и запуск ее с разделением ступеней, которые подаются с радиолокационно-оптического комплекса (РЛОК) распознавания спутников и космических объектов, базируемого на упомянутом КИК и его опорно-поворотном устройстве типа СМ-830, который включает в себя силовой следящий привод с возможностью наведения и работы антенного и передающего устройства в условиях качки корабля, обеспечения всех видов работ, проводимых РЛОК, например, корабельного типа «Крона», причем упомянутый КИК, например, проекта 1914.1, снабженный артиллерийскими установками и ракетными комплексами противоторпедной защиты, но и зенитно-ракетными комплексами ПВО, имеет в кормовой надстройке авиационные многоуровневые ангары со средствами, как-то: краны, лифты-подъемники, системы выкатки и фиксации МБСВ/МПСВ на его кормовых вертолетных площадках для выполнения технологии вертикального взлета, а после выполнения ими миссии- вертикальной одновременной или поочередной их посадки на соответствующие вертолетные площадки палубы океанического КИК.
Кроме того, каждый МБСВ/МПСВ, достигая маршевой тяговоуроженности первого уровня - 0,23 или второго- 0,28 либо третьего уровня - 0,44 или четвертого - 0,54, используется соответственно 27% или 36% либо 72% или 100% мощности их СУ на высоте 15 км с упомянутыми САК и МАК обеспечивается скорость 0,8 Маха (М) или М=0,894 либо транс- или сверхзвуковая скорость М=0,992 или М=1,11 соответственно, а каждый их КГтД снабжен его реактивным соплом с форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутым ОТВ и задними перед форсажной камерой открытыми управляемыми створками упомянутой гон Долы для Дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговоуроженность их СУ с 0,54/0,47 до 0,78/0,68, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов МПСВ позволит увеличить жесткость ПКФ и снизить толщину обшивки и, как следствие, уменьшить массу, причем планер МПСВ с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный броне-фонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видео датчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом для управления МПСВ в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видны на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
Благодаря наличию этих признаков, которые позволят освоить ударную КАРС, имеющую группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемых попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого КИК, причем МБСВ с МПСВ в их комбинации снабжены как меньшими асимметричными крыльями (МАК) либо МАК с большими асимметричными крыльями (БАК), так и двумя двухвинтовыми несущими системами (ДВНС), используемыми при ВВП и коротком взлете/вертикальной посадке (КВВП), включающими одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, установленные с их перекрытием а=1,5 на пилонах МАК, смонтированных зеркально БАК на каждом подкрыльном фюзеляже (ПКФ) со всеми, например, их ОНВ с профилированными противовесами, выполненных с автоматами перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации и свободного их вращения при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над бортами ПКФ от кормовой его части к носовой и от носовой к кормовой части при равном удалении в плане осей их вращения от центра масс и упомянутой УР, и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с его воздухозаборниками и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, удвоенной двухдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в каждой ДВНС-Х2 и/или на соответствующие ОТВ, создающие, например, в каждой пропульсивно-реактивной системе (ПРС) синхронную тягу при выполнении ВВП и КВВП или горизонтальном полете, но и выполнены с возможностью преобразования полетной конфигурации Соединенных МБСВ/МПСВ после установки левого и правого ПКФ на концах соответствующих консолей крыла упомянутой УР так, что левая и правая консоли МАК имеют углы стреловидности χ=-45° и χ=+45° соответственно либо образования их двумя БАК составного асимметричного крыла (САК) с удвоенным его удлинением λ=8,0 и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными и ДВНС-Х2, и ПРС-R2 в реактивный автожир с авторотирующими ОНВ или самолет с зафиксированными их ОНВ с противовесами и их лопастями, размещенными в плане параллельно продольным осям ПКФ и упомянутой УР соответственно вперед и назад по полету, но и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ, соединенных крылом упомянутой УР либо их прямым САК, образующим над их ПКФ Х-образные крылья с разновеликими консолями, имеющими МАК с меньшим в 1,74 раза размахом, чем одно БАК, определяемым из соотношения: LMAK=ROHB × а × cos χ=45°, м (где: ROHB - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность МАК), но и обратно, при этом снизу под или сверху над центром масс МБСВ/МПСВ имеются в утонченностях их ПКФ механизмы крепления и расцепления, разъемно соединяющие соответствующие консоли упомянутой УР с ПКФ, образующие единую конструкцию для совместного ими переноса УР, синхронного в полете их отделения от крыла УР для ее запуска и последующего раздельного возврата с автоматической вертикальной их посадкой на палубу упомянутого КИК либо на правой/левой законцовках БАК соответственно левого МБСВ/правого МПСВ имеются их механизмы крепления и расцепления, образующие САК и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН)- упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого КИК. Все это позволит в океанической КАРС с МБСВ/МПСВ и удвоенными их ДВНС-Х2 и ПРС-R2 повысить безопасность, т.к. в случае отказа одной из ССТ на режимах ВВП их КГтД выполнены с автоматическим выравниванием и равным перераспределением при этом оставшейся мощности каскада ССТ между ОНВ. Прямые САК с МАК и разнонаправленной χ=±45° их стреловидностью обеспечат в соединенных МБСВ/МПСВ на сверхзвуковой скорости М=1,2 уменьшение волнового сопротивления в 2,8 раза в сравнении со стреловидным крылом χ=+45° (см. патент US 3737121 A, NASA).
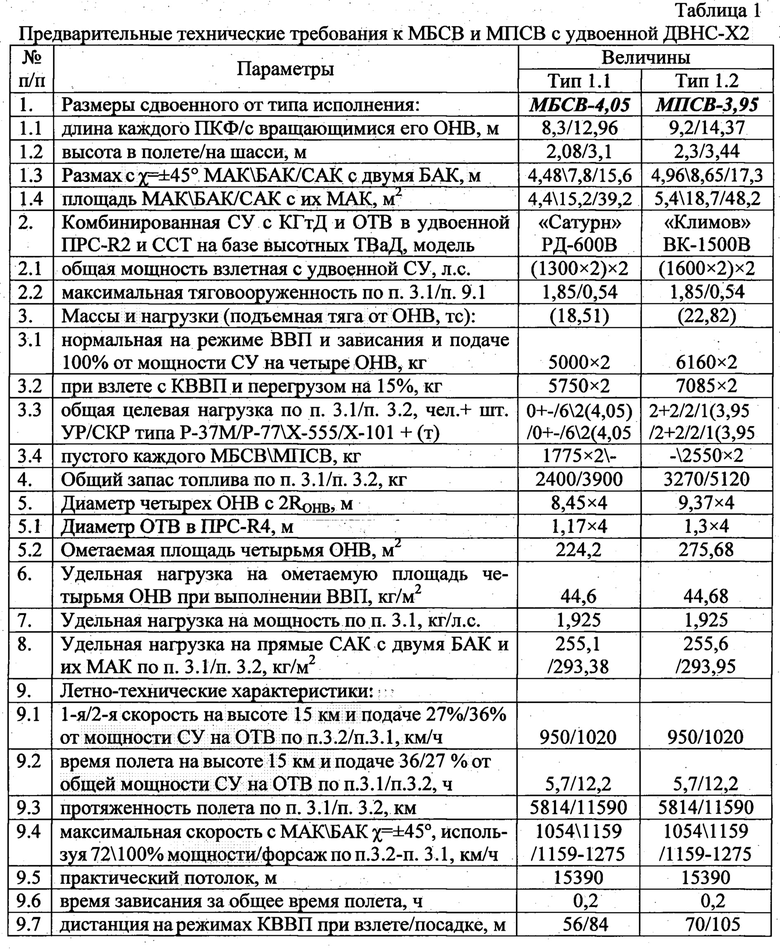
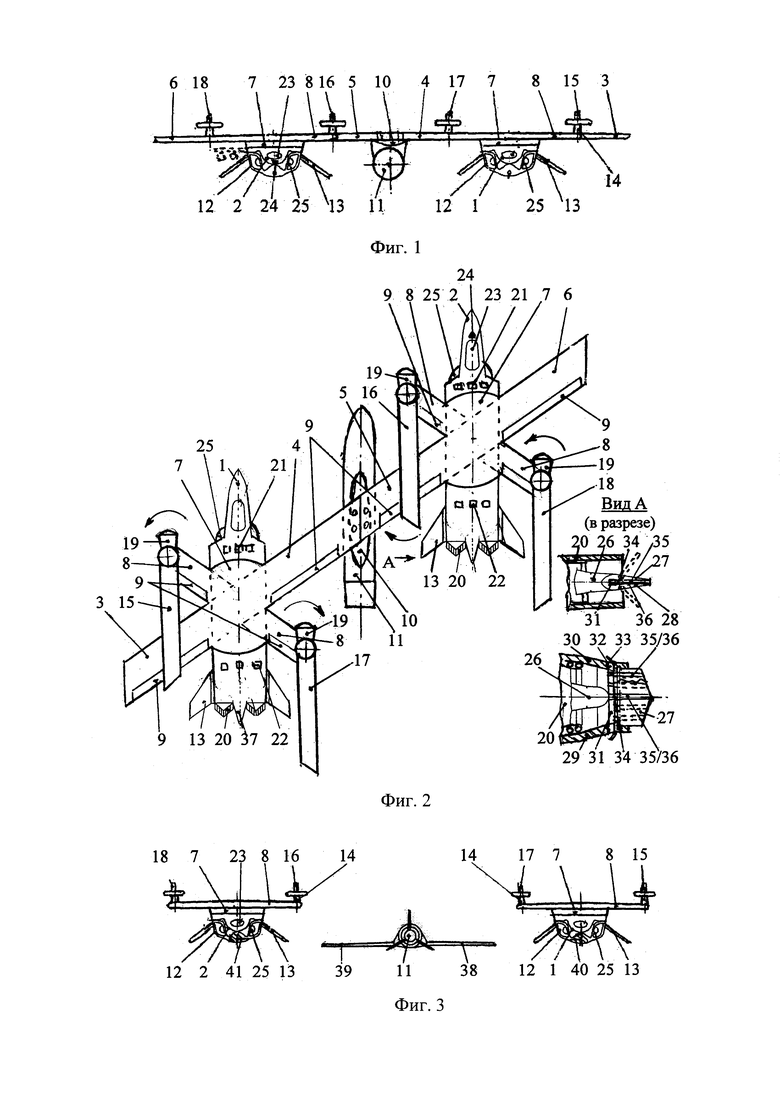
Предлагаемое изобретение океанической КАРС с МБСВ/МПСВ, соединенными прямым САК с разнонаправленной χ=±45° стреловидностью, правая/левая консоли которого состыкованы с обтекателем ПКР Х-47М2 либо крылом СКР с их ПКФ, имеют четыре их КГтД с УВТ их плоских сопел, приводящих ОНВ и/или ОТВ, иллюстрируется на общих видах спереди/сверху либо спереди соответственно фиг. 1/2 либо фиг. 3:
фиг. 1/2 в конфигурации самолета/вертолета с КГтД, приводящими для создания горизонтальной тяги четыре ОТВ/вертикальной тяги четыре ОНВ соответственно на режимах скоростного полета с зафиксированными лопастями, размещенными параллельно оси симметрии/работающими ОНВ при ВВП и зависании с двумя ПКФ, правый из них показан с боковой створкой условно пунктиром с ПУ УР воздух-воздух;
фиг. 3 в конфигурации двух самолетов с их ПКФ, отделяемых в полете от крыла 38-39 СКР для ее запуска и раздельного возврата МБСВ/МПСВ с автоматической вертикальной посадкой на палубу КИК каждого из них как вертолета с его ОНВ в ДВНС-Х2.
Океаническая ударная КАРС с соединенными МБСВ/МПСВ, имеющими планер из алюминиевых сплавов и композитного углепластика, удвоенные ДВНС-Х2 с ПРС-R2, представлена на фиг. 1-2 левым МБСВ с ПКФ 1/правым МПСВ с ПКФ 2, имеющим левую 3 и правую 4 консоли БАК 3-4/левую 5 и правую 6 консоли БАК 5-6 с их стреловидностью χ=+45° и χ=-45° соответственно, которые интегрированы с обтекателем 7 и МАК 8, снабжены по всему их размаху закрылками 9 и треугольными в плане законцовками с внешними их сторонами, размещенными параллельно оси симметрии. Консоли 3/5 прямых БАК 3-4/БАК 5-6 имеют механизмы крепления и расцепления (на фиг. 1-3 не показано), образующие САК 3-4/5-6 и разъемно соединяющие их консоли с верхним обтекателем 10 совместно ими переносимой ПКР 11 (см. фиг. 1-2), но и одновременно отделяемые от нее в полете для ее запуска с последующим раздельным возвратом и автоматической вертикальной их посадкой на палубу КИК. Левый 1/правый 2 ПКФ с боковыми воздухозаборниками 12 имеют на их концах цельно-поворотные кили 13, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии. На концах МАК 7, размещенных зеркально БАК 3-4/5-6, смонтированы надкрыльные пилоны 14 с валами (на фиг. 1-3 не показано) двух передних 15-16 ОНВ /двух задних 17-18 ОНВ с их противовесами 19, которые при выполнении ВВП вращаются над их консолями и ПКФ 1/2 и при горизонтальном полете их лопасти фиксируются вдоль бортов ПКФ 1/2 (см. фиг. 1). Каждый ПКФ 1/2 снабжен передней и задними главными стойками с колесами трехопорного шасси, убирающегося вперед по полету в соответствующие их отсеки, и содержит в кормовых гондолах их КГтД, каждый из которых имеет внешний и внутренний контуры соответственно с ОТВ в ITPC-R2 и ССТ, выполнен с передним выводом вала для отбора мощности от ССТ и возможностью передачи мощности от нее на главный редуктор (на фиг. 1-3 не показаны), который перераспределяет 50% и 50%, но и 72% и 100% от взлетной мощности комбинированной СУ соответственно При выполнении ВВП и зависания между двумя парами угловых редукторов ОНВ 15-16/ОНВ 17-18 в удвоенной ДВНС-Х2, но и при сверхзвуковом полете на ОТВ от ССТ. Каждый КГтД имеет прямоугольное плоское сопла 20 с УВТ, передние 21 и задние 22 управляемые створки в кормовой гондоле ПКФ 1/2 для дополнительного в нее подвода воздуха на форсажных режимах работы.
Управление соединенными МБСВ/МПСВ обеспечивается общим, дифференциальным и циклическим изменением шага ОНВ 15-18, отклонением цельно-поворотных килей 13 и реактивных сопел 20 с УВТ. При горизонтальном полете как реактивного автожира или самолета подъемная сила создается соответственно авторотирующими ОНВ 15-18 с САК 3-4/5-6 и МАК 7 или САК 3-4/5-6 и МАК 7 (см. фиг. 1-2), реактивная тяга - системой ПРС-R4 через плоские сопла 20 в КГтД, на режиме перехода - САК 3-4/5-6 с МАК 7 и ОНВ 15-18. После создания подъемной тяги ОНВ 15-18, выполненными с жестким креплением лопастей, обеспечиваются режимы ВВП или КВВП при создании плоскими соплами 20 в КГтД требуемой маршевой тяги для поступательного полета. При выполнении ВВП и зависания изменение балансировки по тангажу и крену обеспечивается изменением соответствующего циклического шага посредством автомата перекоса каждого ОНВ 15-18, а путевое управление - изменением крутящих моментов в парах ОНВ, вращающихся в плане в одном направлении, например, левого ОНВ 15 с правым ОНВ 18 и правого ОНВ 17 с левым ОНВ 16 соответственно против часовой и по часовой стрелке (см. фиг. 2). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях до 300…350 км/ч и осуществляется соответствующее уменьшение оборотов вращения ОНВ 15-18. По мере разгона с ростом подъемной силы САК 3-4/5-6 подъемная сила ОНВ 15-18 уменьшается. При достижении скорости до 400…450 км/ч и для преобразования в реактивный самолет лопасти ОНВ 15-18 синхронно фиксируются и размещаются параллельно оси симметрии палубных МБСВ/МПСВ (см. фиг. 1). При транс- или сверхзвуковом их полете изменение балансировки по курсу и тангажу или крену обеспечивается отклонением соответственно асинхронным килей 13 и синхронным или дифференциальным сопел 20 с УВТ на ПКФ 1/2. БСУ МПСВ обеспечивает опциональное его управления пилотами из двухместной кабины 23 без застекления ее окон, но и целеуказание - радаром с АФАР и ЭОД 24, которые смонтированы на его ПКФ 2. Каждый боковой воздухозаборник 12 КГтД выполнен без пластинчатого отсекателя пограничного слоя, имеет коническое тело 25, сжимающее поток и формирующее коническое его течение. Каждое плоское сопло 20 снабжено центральным телом 26, имеющим на его конце термостойкие верхнее 27 и нижнее 28 трапециевидные при виде сбоку поперечные расщепляемые створки с их раздельными приводами, отклоняющими от оси сопла 20 и между боковых его стенок 29-30 вверх и вниз совместно двумя либо раздельно соответственно на углы от ±5°…15° до ±45°…±55° либо углы ±20°, но и поперечную полость 31, сообщаемую с атмосферой каналами 32 со створками 33 в боковых стенках 29-30 сопла 20, но и с проточной его частью продольными и щелями 34, и верхними 35/нижними 36 пазами в створках 27/28 соответственно (см. фиг. 2 вид А). ПКФ 1 МБСВ между его КГтД содержит кормовой обтекатель 37 с отсеком, снабженным на его конце выдвижной буксируемой на тросе ложной целью. Левая 38/правая 39 консоли крыла СКР 11 типа Х-101 разъемно соединяются снизу ПКФ; 1/2 в их утонченностях 40/41 для совместного ее переноса и последующего синхронного отделения МБСВ/МПСВ от крыла 38-39 СКР 11 (см. фиг. 3) для сброса и ее запуска.
Таким образом, ударно-стратегическая КАРС с палубными соединенными МБСВ /МПСВ, имеющими КГтД, приводящими для создания вертикальной тяги ОНВ или горизонтальной тяги ОТВ с работающими ОНВ или зафиксированными их лопастями, представляют собой модульные конвертопланы, преобразующие полетную их конфигурацию только изменением условий работы ОНВ. Прямые их САК и МАК с разнонаправленной их стреловидностью χ=±45°, смонтированные на каждом ПКФ, увеличивают показатели аэродинамических и структурных преимуществ, особенно, на сверхзвуковых скоростях М=1,2, что позволит увеличить взлетный вес на 17% или дальность полета на 29%. Освоение для ударной КАРС на базе соединенных МПСВ-3,95 (см. табл. 1) тяжеловооруженных МБСВ-5, несущих под САК одну ПКР типа Х-47М2 «Кинжал» или ПСР 95М6 «Контакт», позволит пилотам МПСВ управлять оружейными нагрузками ведомых МБСВ, их навигацией и глобальным позиционированием, но и создать глобальную противоспутниковую систему в Индийском, Тихом и Атлантическом океанах и безопасную авиазону между ПВО цели и КИК проекта 1914.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ СИСТЕМ КОРАБЕЛЬНО-АВИАЦИОННЫХ РАКЕТНЫХ | 2020 |
|
RU2748042C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОМПЛЕКСОВ АРКТИЧЕСКИХ РАКЕТНО-АВИАЦИОННЫХ | 2020 |
|
RU2743311C1 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| ПАЛУБНАЯ АВИАЦИОННАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ СИСТЕМА | 2019 |
|
RU2717280C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| СИСТЕМА КОРАБЕЛЬНАЯ АВИАЦИОННО-РАКЕТНАЯ ПРОТИВОСПУТНИКОВАЯ | 2020 |
|
RU2748043C1 |
| ПРОТИВОКОРАБЕЛЬНЫЙ АВИАЦИОННО-УДАРНЫЙ КОМПЛЕКС | 2020 |
|
RU2749162C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
Изобретение относится к корабельным ударно-стратегическим средствам военной блочно-модульной техники океанического исполнения. КАРС включает модульные беспилотные и пилотируемые самолеты-вертолеты с большими асимметричными крыльями (БАС), имеющие соответственно на правой и левой законцовках стыковочные узлы, разъемно соединяющие их консоли с верхним обтекателем совместно переносимой управляемой ракеты (УР), одновременно отделяемые в полете для запуска УР с последующим раздельным возвратом самолетов-вертолетов на КИК. Вертолеты-самолеты имеют смонтированные на их подкрыльных фюзеляжах зеркально БАС меньшие асимметричные крылья с пилонами однолопастных несущих винтов (ОНВ) и комбинированные газотурбинные двигатели со свободными силовыми турбинами, приводящими ОНВ и/или в кольцевых обтекателях турбовентиляторы, создающие реактивную тягу с работающими/авторотирующими ОНВ или зафиксированными их лопастями в конфигурации автожира или самолета. Обеспечивается увеличение целевой нагрузки, повышение вероятности поражения цели - спутника Земли, расположенного на низкой орбите 120…200 км, возврат ЛА на вертолетную площадку для повторного использования. 2 з.п. ф-лы, 3 ил., 1 табл.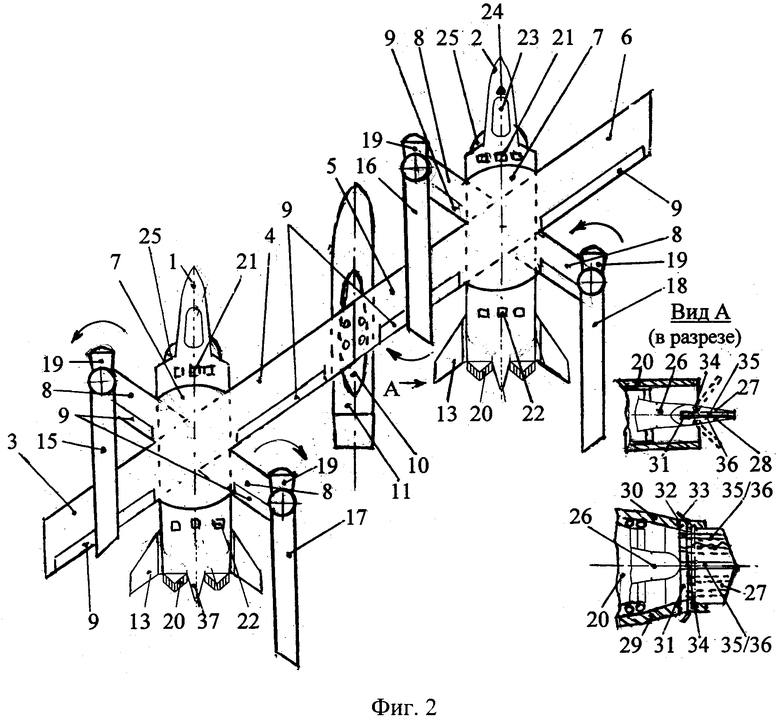
1. Корабельная авиационно-ракетная система (КАРС), содержащая корабль измерительного комплекса (КИК) с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ), обеспечивающую управление с командного пункта (КП) КИК, отличающаяся тем, что она имеет группу аппаратов вертикального взлета и посадки (ВВП), включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемых попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого КИК, причем МБСВ с МПСВ в их комбинации снабжены как меньшими асимметричными крыльями (МАК) либо МАК с большими асимметричными крыльями (БАК), так и двумя двухвинтовыми несущими системами (ДВНС), используемыми при ВВП и коротком взлете/вертикальной посадке (КВВП), включающими одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, установленные с их перекрытием а=1,5 на пилонах МАК, смонтированных зеркально БАК на каждом подкрыльном фюзеляже (ПКФ) со всеми, например, их ОНВ с профилированными противовесами, выполненных с автоматами перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации и свободного их вращения при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над бортами ПКФ от кормовой его части к носовой и от носовой к кормовой части при равном удалении в плане осей их вращения от центра масс и упомянутой УР, и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с его воздухозаборниками, и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, удвоенной двухдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в каждой ДВНС-Х2 и/или на соответствующие ОТВ, создающие, например, в каждой пропульсивно-реактивной системе (ПРС) синхронную тягу при выполнении ВВП и КВВП или горизонтальном полете, но и выполнены с возможностью преобразования полетной конфигурации соединенных МБСВ/МПСВ после установки левого и правого ПКФ на концах соответствующих консолей крыла упомянутой УР так, что левая и правая консоли МАК имеют углы стреловидности χ=-45° и χ=+45° соответственно, либо образования их двумя БАК составного асимметричного крыла (САК) с удвоенным его удлинением λ=8,0 и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными и ДВНС-Х2, и ПРС-R2 в реактивный автожир с авторотирующими ОНВ или самолет с зафиксированными их ОНВ с противовесами и их лопастями, размещенными в плане параллельно продольным осям ПКФ и упомянутой УР соответственно вперед и назад по полету, но и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ, соединенных крылом упомянутой УР либо их прямым САК, образующим над их ПКФ Х-образные крылья с разновеликими консолями, имеющими МАК с меньшим в 1,74 раза размахом, чем одно БАК, определяемым из соотношения: LMAK=ROHB × а × cos χ=45°, м (где: ROHB - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность МАК), но и обратно, при этом снизу под или сверху над центром масс МБСВ/МПСВ имеются в утонченностях их ПКФ механизмы крепления и расцепления, разъемно соединяющие соответствующие консоли упомянутой УР с ПКФ, образующие единую конструкцию для совместного ими переноса УР, синхронного в полете их отделения от крыла УР для ее запуска и последующего раздельного возврата с автоматической вертикальной их посадкой на палубу упомянутого КИК, либо на правой/левой законцовках БАК соответственно левого МБСВ/правого МПСВ имеются их механизмы крепления и расцепления, образующие САК и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН) упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого КИК.
2. КАРС по п. 1, отличающаяся тем, что в упомянутых МБСВ/МПСВ каждый их КГтД содержит между упомянутыми ОТВ и ССТ и соосно с двумя последними Т-образный в плане осевой редуктор, имеющий продольный по его оси входной вал, например, от одной ССТ и выходные продольный и поперечный валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй - на Т-образный в плане главный редуктор, продольный вал которого вращательно связан через муфту сцепления с Т-образным при виде сзади редуктором, передающим выходными его валами, проложенными в консолях МАК, равновеликую мощность на угловые редукторы ОНВ, а в каждом их ПКФ его боковые воздухозаборники, не имеющие пластинчатого отсекателя пограничного слоя и внутренних подвижных регулирующих элементов, выполнены и для экранирования лопаток ОТВ их упомянутых КГтД, и отведения пограничного слоя, и повышения коэффициента восстановления полного давления как без щели для слива пограничного слоя, но и каждый включает рампу, сжимающую поток и формирующую коническое его течение, а на режимах их ВВП и зависания изменение балансировки по тангажу и крену обеспечивается изменением соответствующего циклического шага посредством автомата перекоса каждого ОНВ, а путевое управление изменением крутящих моментов в парах ОНВ, вращающихся в одном направлении при виде сверху левого ОНВ МБСВ с правым ОНВ МПСВ и правого ОНВ МБСВ с левым ОНВ МПСВ соответственно против часовой и по часовой стрелке, при этом на режимах ВВП и зависания упомянутых МБСВ/МПСВ при удельной нагрузке на мощность комбинированной их СУ, составляющей ρN=1,92 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего как систему синхронизации каскада ССТ в их КГтД, оснащенную последовательно соединенными блоком приведения давления в компрессоре их ССТ, блоком формирования заданного значения частоты вращения и углового положения лопаток их ССТ и исполнительными органами, которые корректируют угловое рассогласование лопаток в каскаде ССТ и обеспечивают заданный расход топлива, формирующий требуемую мощность, так и систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в упомянутой удвоенной ДВНС-Х2, составляющей ρВТ=1,85 с учетом потерь от обдува упомянутых ПКФ и крыла УР с МАК либо САК с МАК, включающего режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ОНВ соответственно как от двух пар работающих ССТ, так и от одной в ней из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ОНВ при отказе одной ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности в удвоенной ДВНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (Тр, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения ПКФ и дисков вращения ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего управляемого его снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован, чтобы: определить относительную позицию между их ПКФ с колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПКФ и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, а их компьютер управления полетом выполнен с дополнительным компьютером суммирования данных датчиков, но и с возможностью преобразования данных с каждого датчика в относительное положение, которое определяется на основе глобального положения, причем в упомянутых МБСВ/МПСВ каждое прямоугольное плоское сопло 20 их КГтД для уменьшения инфракрасного (ИК) излучения и управления вектором тяги (УВТ) снабжено Центральным телом 26, имеющим на его конце термостойкие верхнее 27 и нижнее 28 трапециевидные при виде сбоку поперечные расщепляемые створки с их раздельными приводами, отклоняющиеся от его оси и между боковых его стенок 29-30 вверх и вниз совместно двумя на углы ±45°…±55° или углы ±5°…15° для реверса тяги или изменения проходного сечения либо раздельно на углы ±20° синфазно или дифференциально для продольного или поперечного управления соответственно и поперечную полость 31, сообщаемую с атмосферой каналами 32 со створками 33 в боковых стенках 29-30 сопла 20, но и с проточной его частью продольными и щелями 34, и верхними 35/нижними 36 пазами в створках 27/28 соответственно, а каждый их ПКФ имеет от пирамидальной носовой его части скошенные по всей его длине боковые стороны, образующие с боковыми воздухозаборниками при виде спереди пяти- или шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, при этом малозаметные МБСВ/МПСВ выполнены соответственно без/с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления МПСВ и возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, смонтированные бок о бок, срабатывающие на режимах выполнения ВВП и зависания автоматически после отстрела пиропатронами лопастей ОНВ при аварийной ситуации, а ПКФ в МБСВ между его КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, а их БСУ оснащена электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления из кабины пилотов и/или их комбинации, причем МБСВ/МПСВ, несущие под пилоном упомянутого их САК противокорабельную ракету (ПКР) Х-47М2 «Кинжал», обеспечивают ее управляемый запуск на сверхзвуковой скорости и высоте 15 км и позволяют достичь дальности ее полета до 2160/3570 км, используя технологию ВВП/КВВП соответственно, а каждый их ПКФ имеет на их концах цельно-поворотные кили, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии МБСВ/МПСВ, а каждое их БАК и МАК имеют треугольные в плане законцовки с внешними их сторонами, размещенными параллельно их оси симметрии, первое из них снабжено складывающимися вверх концевыми его частями, обеспечивающими при раздельном размещении МБСВ и МПСВ в ангаре упомянутого КИК с установленными во флюгерное положение лопастями их ОНВ, зафиксированными вдоль бортов их ПКФ, и наравне со сложенными их БАК уменьшают в 4,4…4,6 раза стояночную их площадь от взлетной, при этом МБСВ/МПСВ, несущие под пилонами упомянутого их САК две стратегические крылатые ракеты (СКР) типа Х-555, образующие после их запуска автономные рои СКР с буксируемыми ложными их целями, использующие маловысотный профиль их полета и систему их самообороны - станцию активных электронных помех, повышают, используя технологию ВВП/КВВП, дальность их действия до 6407/9295 км соответственно, а их ПКФ содержат одно- и двухстворчатые соответственно боковые и нижние отсеки, ПУ которых с закрепленными на них УР типа Р-77 и ПКР типа Х-38М смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а под пилоном их САК, неся упомянутую СЦН - топливный бак, позволит, используя его топливо, долететь каждой их паре в авиагруппе до надводной цели, затем, разделяясь и атакуя ее роем, повысить поражающую возможность и дальность полета ПКР с 40 км до 1830 км, а комплекс их вооружения имеет авиационные пушки, встроенные в обтекателе нижней носовой части каждого ПФГ, поражающие дозвуковые ударные БЛА и СКР, причем электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается перед кабиной МПСВ сверху носовой части его ПКФ и с радаром последнего обеспечивает на больших, безопасных расстояниях целеуказание и управление оружейными нагрузками и своими, и МБСВ с наведением на цель УР воздух-воздух и ПКР, СКР воздух-поверхность, но и его использования в составе авиагруппы в качестве головного МПСВ, например, с парой предыдущих и более чем парой из последующих ведомых, при этом каждый сенсорный компьютер предыдущих и последующих из ведомых МБСВ, сконфигурированный для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного МПСВ и предыдущих МБСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета и сохранить текущий полет в памяти; программные инструкции, выполняемые процессором для полета МБСВ в соответствии с текущим профилем полета; мультимодальную логику, выполняемую процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному ударно-стратегическому роению, причем тяжеловооруженные МБСВ/МПСВ, несущие после выполнения вертикального взлета под пилоном упомянутого их САК упомянутую СЦН - одну двухступенчатую противоспутниковую ракету (ПСР), поражающую кинетическим ее перехватчиком искусственный спутник Земли (ИСЗ), действующий на низких орбитах 120…200 км, увеличивают, используя транс-/сверхзвуковую скорость, дальность действия ПСР типа 95М6 «Контакт» с 600 км соответственно до 2875/1970 км от упомянутого КИК, при этом наведение ПСР в расчетную точку пространства производится инерциальной системой управления после автоматического сверхзвукового подъема МБСВ/МПСВ с углом наклона их траектории 65° и получением с КП упомянутого КИК команд на выполнение как отделения ПСР от МБСВ/МПСВ-носителей, так и запуска ее с разделением ступеней, которые подаются с радиолокационно-оптического комплекса (РЛОК) распознавания спутников и космических объектов, базируемого на упомянутом КИК и его опорно-поворотном устройстве типа СМ-830, который включает в себя силовой следящий привод с возможностью наведения и работы антенного и передающего устройства в условиях качки корабля, обеспечения всех видов работ, проводимых РЛОК, например, корабельного типа «Крона», причем упомянутый КИК, например, проекта 1914.1, снабженный артиллерийскими установками и ракетными комплексами противоторпедной защиты, но и зенитно-ракетными комплексами ПВО, имеет в кормовой надстройке авиационные многоуровневые ангары со средствами, как то: краны, лифты-подъемники, системы выкатки и фиксации МБСВ/МПСВ на его кормовых вертолетных площадках для выполнения технологии вертикального взлета, а после выполнения ими миссии - вертикальной одновременной или поочередной их посадки на соответствующие вертолетные площадки палубы океанического КИК.
3. КАРС по любому из пп. 1, 2, отличающаяся тем, что каждый МБСВ/МПСВ, достигая маршевой тяговооруженности первого уровня - 0,23 или второго - 0,28 либо третьего уровня - 0,44 или четвертого - 0,54, используется соответственно 27% или 36% либо 72% или 100% мощности их СУ на высоте 15 км с упомянутыми САК и МАК, обеспечивается скорость 0,8 Маха (М) или М=0,894 либо транс- или сверхзвуковая скорость М=0,992 или М=1,11 соответственно, а каждый их КГтД снабжен его реактивным соплом с форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутым ОТВ и задними перед форсажной камерой открытыми управляемыми створками упомянутой гондолы для дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговооруженность их СУ с 0,54/0,47 до 0,78/0,68, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов МПСВ позволит увеличить жесткость ПКФ и снизить толщину обшивки и, как следствие, уменьшить массу, причем планер МПСВ с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный бронефонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующую в передней и задней полусферах все события на 360°, при этом для управления МПСВ в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видной на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотами соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2009 |
|
RU2401779C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| DE 60220144 T2, 24.01.2008 | |||
| СПОСОБ ВИБРОДИАГНОСТИКИ МАШИН | 2006 |
|
RU2314508C1 |
| US 5000398 A1, 19.03.1991. | |||

